Моменты с полиномами Лежандра в качестве ядра были
реклама

УДК 681.3
Применение 2D моментов Лежандра для обработки двумерных дискретных
сигналов
Нго Хыу Фук
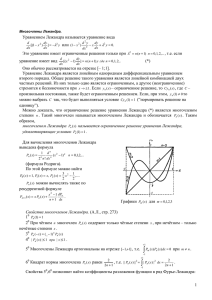
В статье рассмотрен способ вычисления моментных лежандровых характеристик
двумерного дискретного сигнала, инвариантных относительно преобразования поворота.
Предлагаемый автором алгоритм может быть использован во многих задачах анализа сигналов.
Моменты с полиномами Лежандра в качестве ядра были представлены Теагуе (Teague) [1].
Моменты Лежандра принадлежат классу ортогональных моментов[2,3,4], и они использовались,
чтобы достигнуть близкого к нулю значения меры избыточности в наборе функций момента, так,
чтобы моменты соответствовали независимым характеристикам объекта в пространстве.
Прежде аффинные моментные инварианты не получались непосредственно из исходного
момента Лежандра исследуемого изображения. В этом разделе мы вводим новый способ
вычисления
инвариантов
2D
моментов
Лежандра
относительно
сдвига,
поворота
и
масштабирования, основанных на полиномах Лежандра. Полученные инварианты основаны на
центральных моментах Лежандра. Они развиты для асимметричных и симметрических объектов.
Мы решили проблемы, связанные с исчезновением нечетного порядка моментов Лежандра
симметрических объектов. Масштабные инварианты построены, алгебраическим устранением
масштабного множителя, содержавшегося в вычисленных моментах Лежандра. Масштабные
инварианты остаются неизменными для удлиненных, сжатых и отраженных объектов. Инварианты
поворотов тоже получены с использованием центральных моментов Лежандра. Они обобщены для
различных изображений. Другая проблема, связанная с изменением размера объекта при сдвиге
также решена. Мы также вводим новое понятие полутонового изображения для 2D моментов
Лежандра.
МАТЕМАТИЧЕСКАЯ ОСНОВА
Рассмотрим основы теории моментов Лежандра[5,6]. 2D моменты Лежандра порядка
m n определены как:
1
mn
1 1
(2m 1)(2n 1)
Pm ( x) * Pn ( y) f ( x, y)dxdy
4
1 1
(1)
где m, n = 0,1,2, … ∞, Pm и Pn – полиномы Лежандра и f x, y – непрерывная функция объекта.
Полиномы Лежандра образуют полный ортогональный базис, определенный на интервале [-1,1].
Функция объекта f x, y определена на том же самом интервале. Для выполнения условия
ортогональности, полинома Лежандра n-го порядка определен как:
n
Pn ( x) a nj x j
(2)
j 0
и a nj - коэффициенты Лежандра, определены:
a nj (1)
n j
1
2n n
2
2
n j !
где n-j = чётно
j n j
!
! j!
2
Рекуррентное соотношение для полиномов Лежандра,
(3)
Pn (x )
задается следующим
образом:
( 2n 1) xPn 1 ( x) (n 1) Pn 2 ( x)
n
Pn ( x)
(4)
где P0 ( x ) 1 , P1 ( x) x и n>1.
Несколько первых полиномов Лежандра[5,6]:
P0 ( x) 1
(5)
P1 ( x ) x
(6)
P2 ( x)
1
2
3x
2
1
P3 ( x)
1
2
5 x
3
3x
P4 ( x)
1
8
35x
4
30 x 2 3
P5 ( x)
1
8
63x
5
70 x 3 15 x
(7)
(8)
(9)
P6 ( x) 161 231x 6 315 x 4 105 x 2 5
(10)
(11)
2
Поскольку область определения полиномов Лежандра принадлежит интервалу [-1,1], блок
объекта N N пикселов с функцией интенсивности
f i, j , 0 i, j ( N 1) , должен быть
на область 1 x, y 1 . В результате этого, теперь выражение (1) может быть
отображен
выражено в дискретной форме как:
N 1 N 1
mn mn Pm ( xi ) * Pn ( y j ) f (i, j )
i 0 j 0
где mn
2m 12n 1
N2
(12)
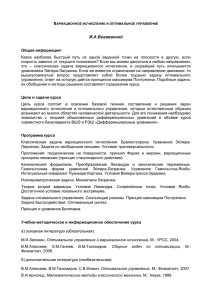
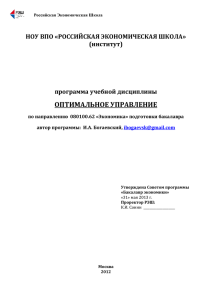
– нормализующий коэффициент; x i , y j обозначает нормализованные
координаты пиксела в интервале [-1,1], которые определены в соответствии с рис. 1:
xi
2i 1
2 j 1
1 и y j
1.
N
N
(13)
Рис. 1: Положение xi рассчитано в дискретном интеграле.
Однако, рассмотренный метод зависит от размера изображения.
Сначала мы вычислим некоторые особенности изображения[4]. Предполагается, что мы
имеем область R (рис. 3.3) содержащую N пикселов:
а. Центр масс.
x
1
N
x ,
y
( x , y ) R
1
N
y .
( x , y ) R
(14)
Центральные моменты порядка m n преобразованы:
mn
( x x )
m
( y y)n
( x , y ) R
(15)
б. Ориентация.
Ориентация определяется как угол оси минимального значения момента инерции. Это
получено минимизацией относительно суммы
3
I ( )
D
2
( m, n)
( x , y ) R
( y y ) cos ( x x ) sin
2
( x , y ) R
(16)
В результате получим:
1
2 1,1
1
1
atan
, 2 atan2 2,0 0, 2 ,2 1,1
2
2
2, 0 0, 2
1 if 1 0 and 2 0
1 if 1 * 2 0
2
1 if 1 0 and 2 0
(17)
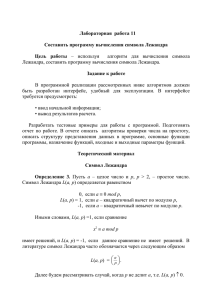
в. Рабочий прямоугольник.
Рабочий прямоугольник – наименьший прямоугольник, содержащий объект, который также
способствует выявлению его ориентации (Рис. 2). Мы используем преобразование:
x cos y sin
x sin y cos
(18)
Найдем min , max , min , max , если A1 ( x1 , y1 ) , A2 ( x2 , y 2 ) , A3 ( x3 , y3 ) , A4 ( x 4 , y 4 )
являются координатами точек, соответственно.
Поскольку мы определили
xi , j ,
yi , j
как нормализованные координаты пиксела в
диапазоне [-1,1], которые зависят от (i, j) – координат в рабочем прямоугольнике:
2dx0
x
1
i, j dx1 dx2
(19)
dx1 j tan i y3 x3 tan ,
2
2
где
dx
dx0 1
dx2
при
при
dx2 j tan i y 4 x4 tan ,
2
2
max min
max min
и
yi, j
2dy0
1
dy1 dy2
(20)
где dy1 j tan i y1 x1 tan , dy2 j tan i y2 x2 tan ,
dy
dy0 1
dy2
при
при
max min
.
max min
В этом случае, нормализованная константа определена как:
rpq
min
( 2 p 1)(2q 1)
max min max
(21)
4
Эти значения используются для всех
инвариантов моментов Лежандра относительно
сдвига, поворота и масштабирования.
Рис. 2: Область R (рабочий прямоугольник) используется для вычисления моментов.
ИНВАРИАНТЫ 2D МОМЕНТОВ ЛЕЖАНДРА ОТНОСИТЕЛЬНО ПРЕОБРАЗОВАНИЯ
ПОВОРОТА
а. Теоретическая основа.
После преобразования координат по формулам (19) и (20), мы можем использовать
основную формулу:
mn
1 1
(2m 1)(2n 1)
1 1 Pm ( x ) * Pn ( y ) f ( x , y )dx dy ; x , y [1,1]
4
Pm ( xi, j ) * Pn ( yi, j ) f (i, j )
или mn rmn (
i , j ) BR
(22)
(23)
Предполагается, что масштабы объекта по осям x и y – a и b, соответственно инварианты
2D моментов Лежандра относительно сдвига, масштабирования и поворота могут быть получены
следующим образом:
t , s ,
mn
1 1
(2m 1)(2n 1)
Pm (a ( x x0 ))Pn (b( y y0 ))
4
1 1
f ( x , y )dx dy ; (a, b) ( R {0})
Уравнение (24) формирует ядро
инвариантов 2D моментов
(24)
Лежандра. Инварианты
обозначены как mn . Эти моменты получены следующим образом:
mn
m
n
rmn
rmn
t , s ,
m 1 n 1
a
b
mk nd tkd,
mk nd kd
k 0 d 0 rkd
k 0 d 0 rkd
m
n
Нормализованные
инварианты 2D моментов
Лежандра
(25)
относительно аффинных
преобразований mn , определены как :
5
mn
1
mn 00
;
( m ) 0 0 ( n )
m, n 0,1,2...;and ξ 1,2...
(26)
б. Экспериментальные результаты
В наших применениях, мы часто используем 3-й порядок 2D моментов Лежандра
инвариантных относительно аффинных преобразований с 2 . Сначала определим три порядка
2D моментов Лежандра, инвариантных относительно сдвига , масштабирования и поворота
Первый порядок:
3
01 00
;
20 03
3
10 00
;
30 02
01
10
Второй порядок:
20
3
20 00
;
40 02
02
3
02 00
;
20 04
11
3
11 00
;
30 03
03
3
03 00
;
20 05
21
3
21 00
;
40 03
Третий порядок:
30
3
30 00
;
50 02
12
3
12 00
.
30 04
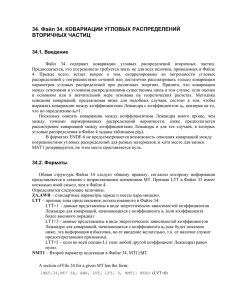
Экспериментальные результаты для моментов полутонового 128x128 изображения объектов
показаны в Таблице 1.
03
ИзображениеВращение
10
01
20
02
11
30
%
21
=0 deg
=30 deg
1,938
1,946
1,825
1,850
2,009
1,709
1,751
1,894
10 3
10 3
10 3
10 3
10 3
10 3
10 3
10 3
1,931
1,939
1,819
1,845
2,002
1,703
1,747
1,889
10 3
10 3
10 3
10 3
10 3
10 3
10 3
10 3
1,844
2,002
1,705
1,745
10 3
10 3
10 3
10 3
10 3
10 3
1,821
1,844
2,003
1,745
1,889 0,3%
10 3
10 3
=100
1,932
deg
10 3
=-25
deg
1,933
10 3
1,94
10 3
1,94
10 3
1,82
10 3
10 3
10 3
1,705
10
3
1,89
0,32%
0,31%
6
=-50
1,937
1,946
1,823
deg
10 3
10 3
10 3
1,85
10 3
2,008
1,706
1,751
1,892
10 3
10 3
10 3
10 3
0,07%
Таблица 1: 2D моменты Лежандра для повернутого полутонового изображения
Список литературы:
1. M. Teague.Image analysis via the general theory of moments.// J. Opt, Soc, Am. 1980,70 (8).- pp.
920-930.
2.
M.K. Mandal, T. Aboulnasr, S. Panchanathan. Image indexing using moments and wavelet.//
IEEE Trans. Consumer Electron. 1996,42 (3) .- pp. 557-565.
3.
J. Haddadnia, K. Faez, P. Moallem. Neural network based face recognition with moment
invariant.// Proceedings of International Conference on Image Processing. 2001,Vol.-pp. 10181021.
4.
H. Qjidaa, L. Radouane.Robust line fitting in a noisy image by the method of moments.// IEEE
Trans. Pattern Anal. Mach. Intell. 1999,21 (11) .- pp. 1216-1223.
5. Legendre moment. website http://homepages.inf.ed.ac.uk/rbf/CVonline/CVentry.html .
6. Legendre Polynomia. website http://mathworld.wolfram.com/LegendrePolynomial.html.
_____________________________________________________________________________________
СВЕДЕНИЯ ОБ АВТОРЕ
Нго Хыу Фук, аспирант кафедры вычислительной математики и программирования Московского
авиационного института (государственного технического университета)
e-mail: ngohuuphuc76@mail.ru
7