МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ Национальный технический университет "Харьковский политехнический институт"
реклама

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
Национальный технический университет
"Харьковский политехнический институт"
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К ВЫПОЛНЕНИЮ КУРСОВОГО ПРОЕКТА
ПО КУРСУ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
ДЛЯ СТУДЕНТОВ ЗАОЧНОГО ОБУЧЕНИЯ
МАШИНОСТРОИТЕЛЬНЫХ СПЕЦИАЛЬНОСТЕЙ
Утверждено
редакционно–издательским
советом университета,
протокол №1 от 05.04.06
Харьков НТУ «ХПИ» 2006
Теория механизмов и машин. Методические указания к выполнению
курсового проекта по курсу теории механизмов и машин для студентов заочного
обучения машиностроительных специальностей / Сост. Н. А. Ткачук, В. Б. Зеленский
и др. – Харьков: НТУ «ХПИ», 2006. – 32 с. – На рус. яз.
Составители: Н. А. Ткачук
В. Б. Зеленский
Г. А. Кротенко
З. С. Сафонова
Рецензент В. И. Сериков
Кафедра теории и систем автоматизированного проектирования механизмов
и машин
СОДЕРЖАНИЕ
Вступление .................................................................................................................. 4
Задание ......................................................................................................................... 7
1. Структурный анализ главного механизма ........................................................... 8
2. Кинематическое исследование главного механизма .......................................... 8
3. Анализ и синтез зубчатого механизма …........................................................... 11
4. Силовой расчет главного механизма .................................................................. 15
5. Выбор приводного асинхронного электродвигателя......................................... 18
6. Исследование движения машинного агрегата
под действием заданных сил ............................................................................... 19
7. Синтез кулачкового механизма .......................................................................... 23
Список литературы .................................................................................................. 25
Приложение А. Графическая часть…………………………………………......... 26
Приложение Б. Законы изменения аналога ускорения
толкателя кулачкового механизма
на фазах удаления ...………………………………………......... 30
Приложение В. Таблица значений inv α ………………………………............ 31
ВСТУПЛЕНИЕ
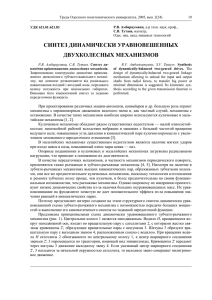
Цель курсового проекта – закрепление и углубление теоретических знаний путем самостоятельного решения комплексной задачи исследования машины. Для выполнения курсового проекта студент получает задание на исследование машинного агрегата, который состоит (рис. 1) из электродвигателя ЭД,
Рисунок 1
понижающей зубчатой передачи ЗР, кулачкового механизма КМ и главного механизма ГМ (шарнирно-рычажного) для выполнения технологического процесса. В соответствии с этим проект включает структурное, кинематическое, силовое исследование главного механизма машины, кинематический анализ и синтез зубчатой передачи, синтез кулачкового механизма, выбор приводного электродвигателя, а также исследование установившегося движения машинного агрегата под действием заданных сил.
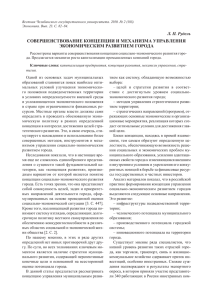
Последовательность выполнения курсового проекта во взаимосвязи отдельных его разделов может быть представлена в виде схемы (рис. 2).
Рассмотрим подробно цель и содержание каждого раздела курсового проекта.
4
Рисунок 2
Раздел 1. Структурный анализ главного механизма. Цель – определение
степени подвижности механизма, количества начальных звеньев и структурных
групп Ассуpа.
Раздел 2. Кинематическое исследование главного механизма. Цель кинематического исследования – определить координаты, скорости и ускорения осей
шарниров и центров масс звеньев, углы поворота, угловые скорости и ускорения
звеньев для ряда положений начального звена (прил. А, лист 1).
Раздел 3. Анализ и синтез зубчатого механизма. Цель – определение передаточного отношения планетарной ступени, определение числа зубьев колеса
для обеспечения заданного передаточного отношения, проверка для планетарной передачи условий соосности, соседства и сборки, а также расчет геометрических параметров передачи с неподвижными осями (прил. А, лист 2).
Раздел 4. Силовой расчет главного механизма. Цель – определение реакций в кинематических парах и уравновешивающей силы, возникающей в зубчатой передаче z 4 − z5 (прил. А, лист 3).
Раздел 5. Выбор электродвигателя. Цель – подбор двигателя,
обеспечивающего необходимую мощность и обороты машинного агрегата.
Раздел 6. Исследование движения машинного агрегата под действием заданных сил. Цель – определение истинной угловой скорости начального звена
на установившемся режиме работы машины. Для исследования заменяем реальный механизм его одномассовой динамической моделью в виде диска, который вращается с угловой скоростью начального звена под действием приведен5
ного момента сил M пр , момент инерции которого равен приведенному моменту инерции I пр (прил. А, лист 3).
Раздел 7. Синтез кулачкового механизма. Цель – определение профиля
кулачка, обеспечивающего заданный закон движения ведомого звена для выполнения вспомогательных работ, например, зажим заготовки в ковочной машине (прил. А, лист 4).
Задания на курсовой проект приводятся в шести вариантах. Эти задания
соответствуют определенному номеру задания на курсовой проект и определенному варианту задания. Номер задания и номер варианта каждому студенту
задает преподаватель. Задания и условные обозначения величин, содержащихся
в задании, приведены в [4].
В данных методических указаниях рассмотрено выполнение курсового
проекта на примере горизонтально-ковочной машины.
Горизонтально-ковочная машина предназначена для горячей штамповки
изделий из пруткового материала, зажимаемого в матрице с вертикальным
разъемом.
На схеме машины показаны два исполнительных механизма: кривошипно-ползунный механизм высадки (рис. 3, а) и кулачковый механизм зажима заготовок (рис. 3, в), а также зубчатый механизм привода (рис. 3, б). Механизм
подачи заготовки не показан.
Механизм высадки (подвижные звенья: кривошип 1, шатун 2, ползун 3)
приводится в движение от электродвигателя посредством планетарного редуктора (зубчатые колеса z1 , z2 , z 2′ , z3 , водило H, рис. 3, б) и зубчатой передачи с
неподвижными осями вращения колес z4 и z5 . Высадочный ползун 3 с
закрепленным на нем пуансоном совершает возвратно-поступательное
движение и при движении вправо осуществляет деформацию заготовки,
предварительно зажатой в матрице.
Механизм зажима заготовки состоит из кулачков прямого и обратного
хода, жестко закрепленных на валу кривошипа.
В разделах 1–7 представлена последовательность выполнения курсового
проекта.
6
Задание
Горизонтально–ковочная машина
n Д = 1450 об/мин;
n1 = 75 об/мин;
l AO = 0,1 м;
l AB = 0,28 м;
l AS2 = 0,084 м;
I S 2 = 1,5 кг·м2;
m2 = 150 кг;
m3 = 200 кг;
Pm = 5000 Н;
а
z1 = 25;
z 2 = 50;
z 2 / = 25;
z3 = 100;
z 4 = 12;
m = 5;
b = 10m = 50 мм;
б
ϕ y = 60° ;
ϕ c = 60° ;
ϕ дв = 20° ;
[δ] ≤ 30° ;
N = 4;
h = 0,02 м.
в
Рисунок 3
7
1. Структурный анализ главного механизма
1.1. Кинематическая схема главного механизма (рис. 4)
По формуле Чебышева определим
число степеней подвижности механизма:
W = 3n − 2P5 − P4 = 3 ⋅ 3 − 2 ⋅ 4 = 1,
Рисунок 4
где n = 3 – число подвижных звеньев;
P5 = 4 (0 − 1; 1 − 2; 2 − 3; 3 − 0 ) – число
кинематических пар 5-го класса; P4 = 0 –
число кинематических пар 4-го класса.
1.2. Построение структурной схемы механизма (рис. 5)
Рисунок 5
Рисунок 6
Выделим структурные группы (рис. 6): группа из звеньев 2 и 3, первая в
порядке образования механизма; 1-й класс по Баранову; 2-й порядок. 2-й класс по
Артоболевскому [1, 2].
2. Кинематическое исследование главного механизма
2.1. Определение масштаба длин
Для построения планов положения механизма необходимо определить
масштаб длин по формуле
l
м
0,1
µ l = OA =
= 0,002
,
мм
ОА 50
где lOA = 0,1 м – истинная длина кривошипа (звено 1); ОА = 50 мм – отрезок,
изображающий на кинематической схеме длину кривошипа (задан призвольно).
Длину звена 2 на чертеже:
l
0,28
= 140 мм.
АВ = AB =
µl
0,002
2.2. Построение кинематической схемы главного механизма
м
строим кинематическую схему главного
мм
механизма в семи положениях с общей точкой О, включая положения, где ползун
В масштабе µ l = 0,002
8
3 занимает крайнее правое и левое положения (прил. А, лист 1), разделив
ϕ p = 180° на 4, а ϕ x = 180° на 3.
2.3. Построение планов скоростей и ускорений
Запишем векторные уравнения для построения планов скоростей и
ускорений структурной группы 2–3 [1, 2].
Векторные уравнения скоростей:
r
r
r
⎧⎪ VB = V A + VBA ;
2
r
r
(2.1)
⎨r
⎪⎩VB 3 = VB0 + V3−0 ,
r
r
r
r
r
r
м
где VB2 = VB3 , VB0 = 0 , V A = ω1 ⋅ lOA = 7,85 ⋅ 0,1 = 0,785
, V A ⊥ OA , VВA ⊥ ВA ,
с
r
π ⋅ n1 π ⋅ 75
=
= 7,85 с -1 .
V 3 − 0 α − α , ω1 =
30
30
Векторные уравнения ускорений:
r
r
rn
rτ
⎧⎪ а B2 = а A + а BA
;
+ а BA
(2.2)
r
rк
r
⎨r
⎪⎩а B3 = a В0 + a 3−0 + a 3−0 ,
r
r
м r
а B2 = а B3 , a A = ω12 ⋅ lOA = 7,85 2 ⋅ 0,1 = 6,16 2 , a A направлен по звену 1 от А к О,
с
rτ
rn
rn
2
a BA = ω2 ⋅ l AB ; вектор a BA направлен по АВ от В к А; вектор а BA
⊥ AB и по модулю
r
r
r
неизвестен; направлен a 3к−0 = 2V3−0 ω0 = 0 , a В0 = 0 , a 3 − 0 α − α .
2.4. Масштабы планов скорости и ускорения
Вычислим масштабы планов скорости и ускорения для построения планов
скоростей и ускорений:
м
– масштаб плана скорости;
µV = µ l ⋅ ω1 = 0,002 ⋅ 7,85 = 0,0157
с ⋅ мм
м
µ а = µ l ⋅ ω12 = 0,002 ⋅ 7,85 2 = 0,0123 2
– масштаб плана ускорения.
с ⋅ мм
Предполагаем, что ω1 = const .
2.5. Графическое решение системы векторных уравнений
Решая графически системы векторных уравнений (2.1) и (2.2), строим планы
скоростей и ускорений для всех положений механизма.
Рассмотрим, например, положение 2.
V
На плане скоростей: отрезок ( pa ) = A = OA = 50 мм. Из построенного
µV
плана скоростей: VBA = (ab) ⋅ µV = 32 ⋅ 0,0157 = 0,56
9
м
;
с
VB = ( pb3 ) ⋅ µV = 26 ⋅ 0,0157 = 0,4
м
, для всех положений механизма значения VBA и
с
VB заносим в табл. 1.
На плане ускорений: (πa ) =
aA
= OA = 50 мм; отрезок
µa
2
n
(ab ) ⋅ µV2
a BA
(
ab )
32 2
(an ) =
=
=
=
= 4,6 мм,
( AB ) 140
µa
µ l ⋅ ω12 ( AB ) ⋅ µ l
2
где
(ab ) = 32
мм из плана скоростей;
( AB ) = 140
мм из плана положения
механизма.
Из построенного плана ускорений:
м
;
с2
м
τ
= (πb3 ) ⋅ µ a = 32 ⋅ 0,123 = 3,94 2 .
a BА
с
Значения отрезков (an ) , а также модули скоростей и ускорений для всех
a B = (πb3 ) ⋅ µ a = 36 ⋅ 0,123 = 4,43
положений механизма занесем в табл.1.
Используя теорему о подобии, на планах скоростей наносим точку S 2 ,
соединяем ее с полюсом p, получим отрезок
VS2 = ( ps 2 ) ⋅ µV = 40 ⋅ 0,0157 = 0,63
( ps2 ) .
Для положения 2 находим
м
.
с
2.6. Определение угловых скоростей и угловых ускорений
Используя планы скоростей и ускорений, определяем угловые скорости и
угловые ускорения звена 2 по формулам
V
0,56
ω 2 = BA =
= 2 c −1 ;
0,28
l AB
ε2 =
τ
(nb ) ⋅ µ a 32 ⋅ 0,123
a BА
=
=
= 14,1 с -2 .
0,28
l AB
l AB
Величины ω2 и ε 2 для всех положений заносим в табл. 1, присвоив знак
плюс, если они направлены по вращению кривошипа, и знак минус, если в
противоположную сторону. Направления ω2 и ε 2 показаны на кинематической
схеме механизма.
Построим в правой части листа (прил. А, лист 1) графики перемещения,
скорости и ускорения звена 3, а также угловой скорости и углового ускорения
звена 2 в функции угла поворота кривошипа на интервале полного оборота.
10
Масштаб для угла поворота
µ SB = 0,002
м
,
мм
µVB = 0,0157
с-2
.
мм
Таблица 1
(ab ) ,
№
м
м
VBA ,
VB ,
полож. мм
с
с
1
50
0,78
0
2
36
0,56
0,4
3
0
0
0,78
4
36
0,56
0,69
5
50
0,78
0
6
30
0,47
0,88
7
30
0,47
0,6
µ ϕ1 = 2
м
,
с ⋅ мм
град
; масштабы по оси ординат:
мм
µаB = 0,0123
м
,
2
с ⋅ мм
µω2 = 0,05
с-1
;
мм
µε2 = 0,5
ω2 , с–1 VS2 ,
2,8
2,0
0
2,0
2,8
1,7
1,7
м
с
0,55
0,63
0,78
0,72
0,55
0,82
0,69
(an ) ,
мм
8,8
4,6
0
4,6
8,8
0,82
0,7
м
с2
3,8
4,2
2,2
aB ,
ε 2 , с–2
4,2
7,3
2,0
3,94
0
14,1
22
14,1
0
20,2
19,4
a S2 ,
м
с2
5,4
4,92
Примечание: если кинематический анализ выполняется на ЭВМ, то вместо
табл. 1 приводится распечатка результатов кинематического анализа.
3. Анализ и синтез зубчатого механизма
3.1. Кинематическая схема зубчатой передачи
Исходные данные:
z1 = 25; z 4 = 12; z 2 = 50; z 2 ′ = 25 ; z3
= 100; m = 5; b = 10m = 50 мм.
3.2. Общее передаточное отношение зубчатой передачи
Определим общее передаточное
зубчатой передачи и число зубьев z5 [2].
iд1 =
πnд
отношение
ωд 151,76
=
= 19,3 ,
ω1
7,85
π ⋅ 1450
= 151,76 c -1 ;
30
30
πn
π ⋅ 75
ω1 = 1 =
= 7,85 c -1 ; iд1 = i14 ⋅ i45 ,
30
30
⎛ z ⋅z ⎞
50 ⋅ 100
где i14 = 1 − ⎜⎜ − 2 3 ⎟⎟ = 1 +
= 9 – передаточное
25 ⋅ 25
⎝ z1 ⋅ z 2′ ⎠
где ωд =
=
Рисунок 7
11
отношение
z5 =
12 ⋅ iд1
планетарного
механизма;
i45 =
z5
z
= 5;
z 4 12
iд1 = 9 ⋅
z5
,
12
отсюда
12 ⋅ 19,3
= 25,7 , округляем до целого z 5 = 26 .
9
9
Проверим для планетарной передачи условия:
• соосности:
m( z1 + z 2 ) = m z3 − z 2/ ,
=
(
•
)
25+50 = 100–25,
75 = 75;
(z1 + z 2 )sin π > z 2/ + 2ha∗ ,
k
соседства:
где k = 3 – число блоков сателлитов (задается); ha∗ = 1 – коэффициент высоты
головки зуба.
(25 + 50) sin 60° > 25 + 2 ,
65 > 27;
z3 ⋅ z 2 + z1 ⋅ z 2′
• сборки:
= Q,
k⋅L
где Q – любое целое число; L – наименьший общий делитель чисел z 2 и z 2′ , в
нашем случае L = 25 .
100 ⋅ 50 + 25 ⋅ 25
= 75 .
3 ⋅ 25
Условие сборки выполняется.
3.3. Синтез зубчатого зацепления
Зубчатое зацепление состоит из колес z4 =12; z 5 = 26 ; m = 5. Считаем, что
зубчатые колеса – прямозубые эвольвентные цилиндрические, нарезанные
стандартным реечным инструментом.
3.3.1. Определяем:
• коэффициенты смещения реечного инструмента из условия устранения
подреза:
для колеса z 4 = 12
⎛
z ⎞ ⎛ 12 ⎞
x4 = ha* ⎜⎜1 − 4 ⎟⎟ = 1⎜1 − ⎟ = 0,294 ;
z min ⎠ ⎝ 17 ⎠
⎝
для колеса z 5 = 26
x5 = 0 , так как z 5 > z min = 17 ; ha* = 1 ;
•
угол эксплуатационного зацепления αW
12
x 4 + x5
0,294 + 0
tg 20° = 0,0205 ;
tg α 0 = inv 20° + 2
z 4 + z5
12 + 26
inv αW = inv α 0 + 2
по значению inv αW = 0,0205 найдем угол αW = 22°10′ (прил. В).
•
коэффициент воспринимаемого смещения
⎞ 12 + 26 ⎛ 0,939 ⎞
z 4 + z 5 ⎛ cos α 0
⎜⎜
− 1⎟⎟ =
− 1⎟ = 0,267 ;
⎜
2 ⎝ cos αW
2 ⎝ 0,926 ⎠
⎠
коэффициент уравнительного смещения
∆y = x 4 + x5 − y = 0,294 + 0 − 0,267 = 0,027 ;
y=
•
•
радиальный зазор
c = c * m = 0,25 ⋅ 5 = 1,25 мм;
( c * = 0,25 – коэффициент радиального зазора);
•
межосевое расстояние
z + z 5 cos α 0
12 + 26 0,939
⋅
= 5⋅
⋅
= 96,33 мм;
аW = m ⋅ 4
2
cos αW
2
0,926
•
радиусы делительных окружностей
mz5 5 ⋅ 26
mz 4 5 ⋅ 12
r4 =
=
= 30 мм;
r5 =
=
= 65 мм;
2
2
2
2
радиусы основных окружностей
mz 4
5 ⋅ 12
cos α 0 =
⋅ 0,939 = 28,17 мм;
rb4 =
2
2
•
rb5 =
•
mz5
5 ⋅ 26
cos α 0 =
0,939 = 61,03 мм;
2
2
радиусы начальных окружностей
rW4 =
mz 4 cos α 0
5 ⋅ 12 0,939
=
⋅
= 30,42 мм;
2 cos αW
2 0,926
rW5 =
mz5 cos α 0
5 ⋅ 26 0,939
=
⋅
= 65,91 мм;
2 cos α W
2
0,926
(проверка: аW = rW4 + rW5 ; 96,33 = 30,42 + 65,91; 96,33 = 96,33 );
•
радиусы окружностей впадин
⎛z
⎞
⎛ 12
⎞
r f 4 = m⎜ 4 + x4 − ha* − c * ⎟ = 5⎜ + 0,294 − 1 − 0,25 ⎟ = 25,22 мм;
⎝2
⎠
⎝ 2
⎠
⎛z
⎞
⎛ 26
⎞
r f5 = m⎜ 5 + x5 − ha* − c * ⎟ = 5⎜ + 0 − 1 − 0,25 ⎟ = 58,75 мм,
⎝ 2
⎠
⎝2
⎠
где ha* = 1 – коэффициент высоты головки;
•
радиусы окружностей вершин
13
⎛z
⎞
⎛ 12
⎞
ra4 = m⎜ 4 + ha* + x4 − ∆y ⎟ = 5⎜ + 1 + 0,294 − 0,027 ⎟ = 36,33 мм;
⎝2
⎠
⎝ 2
⎠
⎛z
⎞
⎛ 26
⎞
+ 1 + 0 − 0,027 ⎟ = 69,86 мм;
ra5 = m⎜ 5 + ha* + x5 − ∆y ⎟ = 5⎜
⎠
⎝ 2
⎝ 2
⎠
проверка: ra4 + r f5 + c = ra5 + r f 4 + c = аW ;
36,33 + 58,75 + 1,25 = 69,86 + 25,22 + 1,25 = 96,33;
•
толщину зубьев по делительной окружности
πm
π⋅5
S4 =
+ 2 x4 m ⋅ tgα 0 =
+ 2 ⋅ 0,294 ⋅ 5 ⋅ tg 20° = 8,92 мм;
2
2
S5 =
•
96,33 = 96,33 = 96,33 ;
πm π ⋅ 5
=
= 7,85 мм;
2
2
шаг зацепления по делительной окружности
P = πm = π ⋅ 5 = 15,7 мм.
3.3.2. В прил. А (лист 2) представлена картина зацепления в масштабе 10:1.
На линии зацепления показана активная часть линии зацепления (ab ) .
3.3.3. Расчет значений коэффициентов относительного удельного
скольжения зубьев произведен по формулам:
ρ
ρ
ρ
ρ
ϑ 4 = 1 − i54 5 = 1 − 0,46 5 ;
ϑ5 = 1 − i45 4 = 1 − 2,17 4 ,
ρ4
ρ4
ρ5
ρ5
i54 =
где
ω5 z 4 12
=
=
= 0,46 ;
ω4 z 5 26
i45 =
ω4 z 5 26
=
=
= 2,17 ,
ω5 z 4 12
ρ5 и ρ 4 – отрезки, взятые по линии зацепления от точек N5 и N4 соответственно;
ρ 5 = l N5N4 − ρ 4 .
Результаты расчетов сведены в табл. 2.
Таблица 2
ρ 4 , мм
0
15
25
45
65
77
ϑ4
−∞
–3,13
0
0,67
0,91
1,0
ϑ5
0,475
0,615
0
–2,05
–10,7
−∞
По полученным значениям ϑ 4 и ϑ5 построены графики изменения ϑ 4 и ϑ5 .
3.3.4. Коэффициент перекрытия
(ab ) =
20
,
ε=
pb
π ⋅ 5 ⋅ 0,939
где (ab ) – длина активной части линии зацепления.
14
4. Силовой расчет главного механизма
Силовой расчет проведен для двух положений механизма: 2 и 7 (прил. А,
лист 3) [1, 2].
4.1. Силовой расчет для положения 2 (рабочий ход)
4.1.1. Определяем:
•
силы тяжести звеньев:
G2 = m2 g = 150 ⋅ 9,8 = 1470 Н;
G3 = m3 g = 200 ⋅ 9,8 = 1960 Н;
•
силу производственного сопротивления по графику (рис. 3, а)
P
5000
Pпс = m ⋅ L2 =
⋅ 7 = 1750 Н,
L
20
где L = 20 мм, L2 = 7 мм – отрезки из графика Pпс (S B ) (прил. А, лист 1);
•
силы и моменты сил инерции звеньев:
r
r
Pи2 = m2 a S2 = 150 ⋅ 5,4 = 810 Н, вектор Pи2 направлен против a S2 и приложен в
центре масс S 2 ;
Pи3 = m3 a S3
r
r
= 200 ⋅ 4,2 = 840 Н, вектор Pи3 направлен против aS3 и приложен в
точке В;
M и2 = I S2 ε 2 = 1,5 ⋅ 14,1 = 21,1 Н·м, M и2 направлен против ε 2 .
r
r
r
r
Определяем внешние реакции R21 , R30 и внутренние реакции R23 = − R32 .
4.1.2. Определение внешних реакций
r
rn
rτ
Реакцию R21 разложим на нормальную R21
и тангенциальную R21
rn
rτ
rn
составляющие: R21
направлена по звену 2, R21
⊥ R21
.
rτ
1) R21 находим из условия равновесия звена 2: ∑ M В Pi = 0 .
( )
Имеем
τ
− R 21
l АB + (G 2 hG2 + Pи 2 hPи ) ⋅ µ l + M и 2 = 0 ;
2
τ
R 21
=
rn
2) R21
(G 2 hG2 + Pи 2 h Pи ) ⋅ µ l + M и 2
=
l АB
(1470 ⋅ 90 + 810 ⋅ 26 ) ⋅ 0,002 + 21,1
=
= 1170 ,8 Н;
0, 28
r
и R30 определяем из условия равновесия структурной группы 2–3:
2
∑ Pi = 0 ;
R 21n + R 21τ + G 2 + Pи 2 + G 3 + Pи 3 + Pпс + R30 = 0 .
15
План сил построен в масштабе µ p = 50
Н
; из плана сил находим
мм
(R ) + (R )
n 2
21
n
R21
= 74 ⋅ 50 = 3700 Н; R30 = 37 ⋅ 50 = 1850 Н; R21 =
τ 2
21
= 3881 Н.
3) Плечо приложения реакции R30 находим из условия равновесия звена 3:
∑ M В (Pi ) = 0 ; R30 x30 = 0 ; x30 = 0 ; R30 проходит через шарнир В.
4.1.3. Внутренняя реакция
звена 2: ∑ Pi = 0
(R
n
21
R23
определена из условия равновесия
+ R 21τ + G 2 + Pи 2 + R 23 = 0
)
построением плана сил. Из
плана сил имеем: R23 = 52 ⋅ 50 = 2600 Н.
4.1.4. Силовой расчет начального (входного) звена (звено 1). Передача
движения звену 1 происходит через зубчатую передачу (см. разд. 3): z 4 = 12 ,
z 5 = 25 . На начальном звене это зацепление показано в
масштабе µl = 0,002
м
.
мм
Сила Pур по условию передачи сил в зубчатом
зацеплении может быть направлена по одной из линий
зацепления I или II (как показано на рис. 8). Выбираем то
направление Pур (по линии I), при котором момент этой
силы относительно точки О создает момент, направленный
Рисунок 8
противоположно моменту силы R12 относительно точки О.
Определяем приложенные к начальному звену:
1) уравновешивающую силу
∑ M O (Pi ) = 0 , (Pур hур − R12 hR
12
Pур =
)⋅ µ
l
= 0;
R12 hR12
hур
Pур , из условия равновесия звена 1
=
3881 ⋅ 13
= 1681,7 Н;
30
2) R10 (реакцию в шарнире О) из условия равновесия звена 1
∑ Pi
= 0;
R12 + Pур + R10 = 0 построением плана сил.
План сил построен в масштабе µ p = 50
Н
; из плана сил имеем
мм
R10 = 90 ⋅ 50 = 4500 Н;
3) уравновешивающий момент M ур = Pур hур ⋅ µ l = 100,9 Нм
4.1.5. Проверка правильности силового расчета с помощью общей теоремы
динамики:
16
(
)
⎛ ∧ ⎞
⎛ ∧ ⎞
*
M ур
ω1 = Pпс + Pи 3 ⋅ V B3 cos ⎜ PпсV B3 ⎟ + G 2V S 2 cos ⎜ G 2V S 2 ⎟ +
⎠
⎝
⎠
⎝
∧
⎞
⎛
+ Pи 2 V S 2 cos ⎜ Pи 2 V S 2 ⎟ + M и 2 ω 2 = (1750 + 840 ) ⋅ 0, 4 (− 1) +
⎠
⎝
+ 1470 ⋅ 0,63 cos 60 ° + 810 ⋅ 0,63 cos 120 ° + 21,1 ⋅ 2 = − 785 ,9 Нм.
− 785 ,9
= − 100 ,11 Нм.
7 ,85
Погрешность силового расчета
*
M ур
=
∆=
*
M ур
− M ур
*
M ур
⋅ 100 % == 0,8 % < [5 %] .
4.2. Силовой расчет для положения 7 (холостой ход)
4.2.1. Определяем силы и момент сил инерции звеньев:
Pи2 = m2 a S2 = 150 ⋅ 4,92 = 738 Н, вектор Pи2
направлен против a S2
и
приложен в центре масс S 2 ;
Pи3 = m3 a S3 = 200 ⋅ 3,94 = 788
Н, вектор
Pи3
направлен против
a В3 и
приложен в точке В;
M и2 = I S2 ε 2 = 1,5 ⋅ 19,4 = 29,1 Нм, M и2 направлен против ε 2 .
4.2.2. Определение внешних реакций
rτ
находим из условия равновесия звена 2:
1) R21
∑ M В (Pi ) = 0 . − R21τ l АB + (G 2 hG
τ
R 21
=
rτ
R21
2
+ Pи 2 hPи ) ⋅ µ l + M и 2 = 0 ;
2
( − G 2 hG2 + Pи 2 h Pи ) ⋅ µ l + M и 2
=
l АB
(− 1470 ⋅ 92 + 738 ⋅ 28 ) ⋅ 0,002 + 29 ,1
=
= − 714 Н;
0, 28
2
направляем в сторону, противоположную изображенному на схеме
нагружения группы Ассура.
rn
r
и R30 определяем из условия равновесия структурной группы 2–3:
2) R21
∑ Pi = 0 ; R21n + R21τ + G 2 + Pи
2
+ G 3 + Pи 3 R30 = 0 .
Строим план сил в масштабе µ p = 50
Н; R30 = 54 ⋅ 50 = 2700 Н; R21 =
Н
n
; из плана сил: R 21
= 26 ⋅ 50 = 1300
мм
(R ) + (R )
n 2
21
τ 2
21
17
= 1483,4 Н.
3) Плечо приложения реакции R30 находим из условия равновесия звена 3:
∑ M В (Pi ) = 0 ; R30 x30 = 0 ; x30 = 0 .
4.2.3. Внутренняя реакция R23 определена из условия равновесия звена 2
R 21n + R 21τ + G 2 + Pи 2 + R 23 = 0 построением плана сил. Из плана сил имеем
R23 = 22 ⋅ 50 = 1100 Н.
4.2.4. Силовой расчет начального звена (звено 1).
Определяем приложенные к начальному звену:
1) Pур из условия равновесия звена 1
∑ M O (Pi ) = 0 , (Pур hур − R12 hR
12
Pур =
2)
R12 hR12
hур
)⋅ µ
=
l
= 0;
1483,4 ⋅ 44
= 2175,6 Н;
30
R10 из условия равновесия звена 1
∑ Pi
= 0;
R12 + Pур + R10 = 0
построением плана сил. Из плана сил имеем
R10 = 38 ⋅ 50 = 19000 Н;
3) уравновешивающий момент
M ур = Pур hур ⋅ µ l = 2175,6 ⋅ 30 ⋅ 0,002 = 130,53 Нм.
4.2.5. Проверка правильности силового расчета с помощью общей теоремы
динамики:
*
M ур
ω1
= Pи 2 VS 2
⎛ ∧ ⎞
⎛ ∧ ⎞
⎜
⎟
cos ⎜ Pи 2 VS 2 ⎟ + G 2VS 2 cos ⎜⎜ G 2VS 2 ⎟⎟ +
⎝
⎠
⎝
⎠
⎛ ∧ ⎞
+ Pи 3V B cos ⎜⎜ Pи 3 V B ⎟⎟ − M и 2 ω 2 ;
⎝
⎠
*
M ур
=
1
(738 ⋅ 0,69 cos 65 ° + 1470 ⋅0,69 cos 70 ° +
7 ,85
+ 788 ⋅ 0,6 ⋅ 1 − 29 ,1 ⋅ 1,7 ) = 125 ,53 Нм.
Погрешность силового расчета
∆=
*
M ур
− M ур
*
M ур
⋅ 100 % == 3,98 % < [5 %] .
5. Выбор приводного асинхронного электродвигателя
5.1. Определение работы силы полезного сопротивления
Работу сил полезного сопротивления определяем по площади диаграммы
сил полезного сопротивления (рис. 3). В рассматриваемом случае площадь
18
представим как сумму площадей прямоугольника со сторонами: P = 1750 Н,
H B = 100 ⋅ 0,002 = 0,2 м и треугольника ∆abc , у которого (bc ) = 3250 Н,
(ac ) = 62 ⋅ 0,002 = 0,124
м.
1
Aпс = 1750 ⋅ 0,2 + 3250 ⋅ 0,124 = 551,5 Дж.
2
5.2. Определение мощности приводного двигателя
Мощность приводного двигателя (N)
Aпс
551,5
N =
=
= 0,765 кВт,
T ⋅ η зп ⋅ ηг ⋅ 1000 0,8 ⋅ 0,9 ⋅ 0,8 ⋅ 1000
где T =
60 60
=
= 0,8 с – время одного оборота звена 1; ηзп = 0,9 – КПД зубчатой
n1 75
передачи; ηг = 0,8 – КПД главного механизма.
5.3. Выбор приводного электродвигателя
По каталогу асинхронных электродвигателей выбираем электродвигатель
4АХ80А4У3 [3].
N = 1,1 кВт – мощность электродвигателя; nc = 1500 об/мин – синхронное
число
оборотов;
nн = 1450
об/мин
–
номинальное
число
оборотов;
I Р = 0,002 кг ⋅ м 2 – момент инерции ротора электродвигателя.
6. Исследование движения машинного агрегата под действием
заданных сил
6.1. Приведение сил главного механизма
Приведенный к звену 1 момент M пр сил полезного сопротивления ( Рпс ) и
сил тяжести определяем по формуле
1
⎛ ∧ ⎞
M пр =
[ РпсVB cos(− 1) + G5VS2 cos⎜ G2VS2 ⎟ + G3VB cos 90°],
ω1
⎝
⎠
для семи положений механизма (табл. 4).
Таблица 4
ϕ1 , град
0
45
90
135
180
240
300
360
Рпс , Н
1750
1750
1750
4000
5000
0
0
0
⎛ ∧ ⎞
cos⎜ G 2V S 2 ⎟
⎠
⎝
1
0,5
0
-0,5
-1
-0,4
0,4
1
M пр , Нм
103
-30,18
-174
-419
-103
-44,19
44,19
103
19
По найденному значению M ПР строим график зависимости M п р = M п р (ϕ1 )
(прил. А, лист 3).
6.2. Приведение масс машинного агрегата
пр
6.2.1. Приведенный к звену 1 момент инерции главного механизма I гл.м
определяем по формуле, кг⋅ м2 ,
I пр
=
гл.м
1
(m2VS22 + I S 2 ω22 + m3VB23 ),
2
ω1
для семи положений механизма (см. табл. 5).
Таблица 5
ϕ1 , град
0
45
90
135
180
240
300
360
пр
I гл.м
, кг·м2
0,93
1,6
3,46
2,9
0,93
2,71
2,4
0,93
пр
пр
По результатам построен на листе 2 график I гл.м
= I гл.м
(ϕ1 ) .
6.2.2. Приведем массы звеньев зубчатой передачи и ротора электродвигателя
к звену 1:
2
I
I зпр =
=
{
пр
р
2
⎛n ⎞
1450 ⎞
2
= I р ⎜⎜ н ⎟⎟ = 0,002⎛⎜
⎟ = 0,9 кг⋅ м ;
⎝ 75 ⎠
⎝ n1 ⎠
(
)
(
)
}
1
I z1 ω 2д + к[ M z 2 + M z 2′ ⋅ V c2 + I z 2 + I z 2′ ⋅ ω c2 ] + I z 4 ω 2z 4 + I z5 =
2
ω1
]
1
{0,009 ⋅ 151,76 2 + 3[(19,13 + 4,78 ) ⋅ 3,2 2 + (0,149 + 0,009 ) ⋅ 50,38 2 +
2
7 ,85
+ 0,0009 } + 0,011 = 34,82, кг ⋅ м 2 ;
I ппр = I рпр + I зпр = 0,9 + 34,82 = 35,72 , кг⋅ м2 – const.
Моменты инерции зубчатых колес определены по формуле
r2
Iz = M z
,
2
где M z – масса колеса; r =
m⋅z
– радиус делительной окружности.
2
M z = πrz2 bγ = π ⋅ 0,05 ⋅ 0,78 ⋅ 10 3 r 2 = 1224,6 ⋅ r 2 , кг,
b = 0,05 м – ширина венца зубчатого колеса; γ = 7,8 ⋅ 10 3 кг/м3 – удельный вес стали.
z1 = z 2′ = 25 ; rz1 = rz2′ =
5⋅ 25
= 62,5 мм;
2
2
M z1 = M z2′ = 4,78 кг; I z1 = I z2′ = 0,009⋅10−3 кг·м ;
20
5 ⋅ 50
M z2 = 19,13 кг;
= 125 мм;
2
5 ⋅ 12
z4 = 12;
rz4 =
= 30 мм;
M z4 = 1,5 кг;
2
5 ⋅ 26
z5 = 26;
rz5 =
= 65 мм;
M z5 = 5,17 кг;
2
Скорость оси сателлита
m( z1 + z 2 )
5 ⋅ (25 + 50)
Vc =
ω z4 =
⋅ 17 ⋅ 10 −3
2
2
z
26
= 17 с-1.
где ω z4 = ω z1 5 = 7,85
z4
12
z2 = 50;
rz2 =
I z2 = 0,149 ⋅ 10 −1 кг·м2;
I z4 = 0,0009 ⋅ 10 −4 кг·м2;
I z5 = 0,011 ⋅ 10 −3 кг·м2.
= 3,2 м/с,
Угловая скорость блока сателлитов ωc определена с использованием метода
инверсии:
ωc − ω z 4
ωz1 − ω z4
=−
z1
25
=−
= −0,5 ;
z2
50
ωc = −50,38 c-1.
6.3. Определение приведенного момента двигателя
Предполагаем, что приведенный момент двигателя M дпр на рабочем участке
механической характеристики электродвигателя можно описать параболой
M дпр = А − Вω2 , где А и В – некоторые постоянные величины, которые определим
по формулам
A=
M нпр ωс2
ωс2 − ωн2
В=
где M нпр = 9549
=
139,7 ⋅ 66,1
= 2062,3 Нм;
66,1 − 61,6
M нпр
139,7
Нм
=
= 31,2 −2 ,
2
2
ωс − ωн 66,1 − 61,6
с
Nэ
1,1
iд1 = 9549 ⋅
⋅ 19,3 = 139,7 Нм – приведенный к звену 1 ноnн
1450
минальный момент на роторе электродвигателя;
πnс
π ⋅ 1500
ωс =
=
= 8,13 с −1 – приведенная к звену 1 синхронная угловая ско30 ⋅ iд1 30 ⋅ 19,3
рость электродвигателя;
πnн
π ⋅ 1450
ωн =
=
= 7,85 с −1 – приведенная к звену 1 номинальная угловая
30 ⋅ iд1 30 ⋅ 19,3
скорость электродвигателя.
21
6.3. Определение закона движения звена 1
Закон движения звена 1 ω1 = ω1 (ϕ) определяем, используя формулу
(I
ωi +1 =
пі
)
(
)
− В∆ϕ ⋅ ωi2 + M прi + M прi +1 + 2 A ⋅ ∆ϕ
I пі +1 + B∆ϕ
,
где i = 1, 2, ... 20 – индекс соответствует номеру положения кривошипа;
2π
∆ϕ =
= 0,314 – угловой шаг.
20
Задавшись ω1 = ωн = 7,85 с-1, последовательно ведем расчет для i = 1, 2, ...
20 на первом обороте кривошипа, а затем, приняв для начала нового оборота
(ω1 )II = (ω 21 )I , где ω21 – значение в конце предыдущего оборота, определяем ω1
для второго оборота. Расчет заканчиваем тогда, когда ωi +1 для какого-то номера i
совпадет с ωi +1 при таком же i предыдущего оборота. Совокупность найденных ω
между этими значениями ωi +1 последовательных оборотов кривошипа и дает
значения ω при установившемся движении. Результаты расчетов сведены в
табл. 6. Значения
I Σпрi
и
М iпр
I iпр (ϕ1 ) и
взяты из графиков
M iпр (ϕ1 ) ,
I iпр = I гпр + 34,91 кг ⋅ м 2 .
i
ωi
i
ωi
Таблица 6
1
2
3
4
5
6
7
8
9
10
11
7,63
8,33
8,30
8,23
8,13
7,99
7,89
7,87
7,76
7,63
7,58
12
13
14
15
16
17
18
19
20
21
7,7
7,77
7,79
7,87
7,97
8,08
8,17
8,25
8,29
8,33
Искомые значения ω выделены в табл. 7. По этим значениям ωi построен
график зависимости ω(ϕ1 ) (прил. А, лист 2).
Из графика находим:
ωmin = 7,58 с-1;
ωmax = 8,33 с-1;
ωmax + ωmin 8,33 + 7,58
=
= 7,955 с-1.
2
2
Коэффициент неравномерности хода машины
ω − ωmin 8,33 − 7,58
δ = max
=
= 0,094 .
ωср
7,955
ωср =
22
Таблица 7
i п/п
I iпр
I iпр+1
М iпр
М iпр+1
ωi +1 ( I )
ωi +1 ( II )
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
35,84
36,11
36,61
37,11
38,11
38,51
38,31
37,91
37,11
36,21
35,91
36,51
37,11
37,91
38,01
37,91
37,51
37,01
36,41
36,11
35,80
36,11
36,61
37,11
38,11
38,51
38,31
37,91
37, 11
36,21
35,91
36,51
37,11
37,91
38,01
37,91
37,51
37,01
36,41
36,11
35,8
35,84
103
60
-20
-70
-140
-174
-300
-410
-380
240
-110
-80
-70
-60
-20
10
30
50
80
100
103
60
-20
-70
-140
-174
-300
-410
-380
-240
-110
-80
-70
-60
-20
10
30
50
80
100
103
103
8,04
8,08
8,04
7,94
7,87
7,85
7,75
7,62
7,58
7,63
7,7
7,77
7,79
7,87
7,97
8,08
8,17
8,25
8,29
8,33
8,32
8,30
8,23
8,13
7,99
7,89
7,87
7,76
7,628
7,58
7,63
7. Синтез кулачкового механизма
7.1. Определение закона движения толкателя
Схема кулачкового механизма показана на рис. 9.
Исходные данные: закон движения толкателя
⎧ a, 0 ≤ ϕ ≤ 0,5ϕ у ,
S ′′ = ⎨
⎩− a, 0,5ϕ у ≤ ϕ ≤ ϕ у ,
где h = 20 мм – ход толкателя; фазовые углы: ϕ у = ϕс = 60° ,
ϕдв = 20° ; [δ] ≤ 30° – допустимый угол давления.
Рисунок 9
Дважды аналитически проинтегрируем закон движения
толкателя.
Для первого участка (0 ≤ ϕ ≤ 0,5ϕ у ) имеем:
S І′′ = a ; S І′ = ∫ adϕ = aϕ + C1 .
Начальные условия: при ϕ = 0 → ∆S I′ = 0 .
Следовательно, C1 = 0 и S І′ = aϕ ,
23
При ϕ = 0 → ∆S I = 0 .
aϕ2
.
2
Следовательно, C2 = 0 и ∆S I =
Для второго участка ( 0,5ϕ у ≤ ϕ ≤ ϕ у ) имеем S II′′ = −a ,
S ІI′ = ∫ − adϕ = −aϕ + C3 .
aϕ у
⎛ ϕ у ⎞ aϕ у aϕ у
;
=−
+ C3 .
При ϕ = 0,5ϕ у → S ІI′ = S І′ ⎜⎜ ⎟⎟ =
2
2
2
2
⎝ ⎠
Откуда C3 = aϕ у и S ІІ′ = −aϕ + aϕ у .
S =
∆ ІI
− aϕ 2
+ С3ϕ + С4 .
2
2
2
2
aϕ2у
⎛ ϕ у ⎞ aϕ у aϕ у aϕ у aϕ у
+ C4 и
;
=
−
+ C4 ⇒
При ϕ = 0,5ϕ у → ∆S ІI = ∆S І ⎜⎜ ⎟⎟ =
8
2
8
8
2
8
⎝ ⎠
S =−
∆ II
aϕ 2
+ aϕ у −
aϕ2у
.
2
4
Определим параметр а из условия:
h=−
aϕ2у
2
+
aϕ2у
−
aϕ2у
4
; a=
(∆S II )max
= h при ϕ = ϕ у ,
4h 4 ⋅ 20
=
= 73 мм.
ϕ 2у 1,047 2
Тогда S I′′ = 73 ; S I′ = 73ϕ ; ∆S I = 36,5ϕ 2 (0 ≤ ϕ ≤ 30°) ;
2
SII′′ = −73; SII′ = −73ϕ + 76,45; ∆S II = −36,5ϕ + 76,45ϕ − 20 (30° ≤ ϕ ≤ 60°) .
Подсчитанные значения S ′ , S ′′ и ∆S на интервале удаления с шагом ∆ϕ = 10° приведены в табл. 8.
Таблица 8
ϕк , град
S ′′ , мм
S ′ , мм
∆S , мм
0
10
20
30
40
50
73
0
0
12,7
1,11
60
-73
25,5
4,44
38,2
10
25,51
15,6
12,8
18,9
В прил. А (лист 4) приведены графики зависимостей
S ′ = S ′(ϕк ) , ∆S = ∆S (ϕк ) .
0
20
S ′′ = S ′′(ϕк ) ,
м
.
Масштабные коэффициенты: µ S′ = µ S = 0,001 м , µ S ′′ = 0,002
мм
мм
7.2. Определение основных параметров кулачкового механизма
Для определения параметра кулачка: S 0 – минимального размера кулачка,
построим зависимость S ′(S ) [2] (прил. А, лист 4)
24
S 0 = 60 мм.
Строим теоретический профиль кулачка, пользуясь методом инверсии.
Определяем радиус ролика из условий:
rp ≤ 0,8ρ min = 0,8 ⋅ 15 = 12 мм;
rp ≤ 0,4 Rmin = 0,4 ⋅ 60 = 24 мм,
где rр – радиус ролика; ρ min = 15 мм – минимальный радиус кривизны теоретического профиля кулачка; Rmin = 60 мм.
Принимаем радиус ролика rр = 12 мм.
Строим рабочий профиль кулачка.
7.4. Определение жесткости замыкающей пружины
Определяем жесткость замыкающей пружины и усилие предварительного
сжатия из условия
Q0 + C∆S ≥ −1,3mт а ,
где Q0 – усилие предварительного сжатия пружины, Н; mт = 2 кг – масса толкателя;
С – жесткость пружины Н/м; ∆S – перемещение толкателя, м; a = S ′′ ⋅ ω2к – ускорение толкателя [2]; ωк = ω1 = 7,85 с-1 – угловая скорость кулачка; S ′′ – аналог ускорения толкателя, м.
Для этого строим график mт а (∆S ) – (прил. А, лист 4), проводим из начала координат касательную к графику, а затем прямую, ей параллельную, на расстоянии
0,3mтаМ ( aМ = S М′′ ⋅ ω2к – ускорение толкателя, соответствующее точке касания М).
Получим график для определения характеристик пружины.
Усилие предварительного сжатия пружины:
Q0 = 0,3mт S M′′ ωк2 = 0,3 ⋅ 2 ⋅ 73 ⋅ 10 −3 ⋅ 7,852 = 2,7 Н.
Жесткость пружины:
С=
mт аM mт S M′′ ω2к 2 ⋅ 73 ⋅ 10 −3 ⋅ 7,852
=
=
= 449,8 Н/м.
∆S M
∆S M
20 ⋅ 10 − 3
Список литературы
1. Теория механизмов и машин: Учеб. для ВТУЗов /К. В. Фролов,
С. А. Попов и др.; Под ред. К. В. Фролова. – М.: Высш.шк., 1987 – 496 с.
2. Теория механизмов и машин /Системный подход/: Учеб. пособие
А. А. Грунауэр, И. Д. Долгих – К.: УМК ВО, 1992, 384 с.
3. ГОСТ 19523-74. – Асинхронные короткозамкнутые трехфазные электродвигатели серии 4А основного исполнения. – Введ. 01.01.1974.
4. Теория механизмов и машин. Задания на курсовой проект и методические
указания по
его
выполнению для
студентов заочного
обучения
машиностроительных специальностей/ Сост. Н. А. Ткачук, В. П. Изюмский и др. –
Харьков: НТУ «ХПИ», 2006 г. – 32 с.
25
ПРИЛОЖЕНИЯ
ПРИЛОЖЕНИЕ А
26
Продолжение прил. А
27
Продолжение прил. А
28
Продолжение прил. А
29
ПРИЛОЖЕНИЕ Б
Законы изменения аналога ускорения толкателя
кулачкового механизма на фазах удаления
№
Наименование и график зависимости ана-
п/п
лога ускорения от угла поворота кулачка
Аналитическое выражение
S ′′ = a ⋅ sin(k ⋅ ϕ),
1
где k =
2π
ϕy
S ′′ = a ⋅ cos(k ⋅ ϕ) ,
2
где k =
π
ϕy
3
⎛
π ⎞⎟
⎜
S ′′ = a ⋅ 1 − 2
⎜
⎟
ϕ
y
⎝
⎠
4
1
⎧
⎪ a, 0 ≤ ϕ ≤ 2 ϕy
S′′ = ⎨
1
⎪− a, ϕy ≤ ϕ ≤ ϕy
⎩
2
30
ПРИЛОЖЕНИЕ В
Таблица значений
α град
мин
0
10
20
inv α
30
40
50
18
0.010760 0.011071 0.011387 0.011709 0.012038 0.012373
19
0.012715 0.013063 0.013418 0.013779 0.014148 0.014523
20
0.014904 0.015293 0.015689 0.016092 0.016502 0.016920
21
0.017345 0.017777 0.018217 0.018665 0.019120 0.019583
22
0.020054 0.020533 0.021019 0.021514 0.022018 0.022529
23
0.023044 0.023557 0.024114 0.024660 0.025214 0.025778
24
0.026350 0.026931 0.027521 0.028121 0.028729 0.029348
25
0.029975 0.030613 0.031260 0.031917 0.032583 0.033260
26
0.033947 0.034644 0.035352 0.036069 0.036798 0.037537
27
0.038287 0.039047 0.039819 0.040602 0.041395 0.042201
28
0.043017 0.043845 0.044685 0.045537 0.046400 0.047276
29
0.048164 0.049064 0.049976 0.050901 0.051838 0.052788
30
0.053751 0.054728 0.055717 0.056720 0.057736 0.058765
31
Навчальне видання
Теорія механізмів и машин. Методичні вказівки до виконання курсового проекту з курсу теорії механізмів і машин для студентів заочного навчання
машинобудівних спеціальностей
Російською мовою
Укладачі: Ткачук Микола Анатолійович
Зеленський Володимир Борисович
Кротенко Галина Анатоліївна
Сафонова Зінаїда Семенівна
Відповідальний за випуск М. А. Ткачук
Роботу рекомендував до видання В. К. Бєлов
Редактор О. С. Самініна
Комп’ютерна верстка І. Я. Храмцова
План 2006 р., п. 72/
Підп. до друку
Друк – ризографія.
Обл. – вид.арк. 1,6
Формат 60х841/16.
Гарнітура Times.
Наклад 100 прим.
Зам. №
Папір друк. №2.
Ум. друк. арк. 1,4.
Ціна договірна
Видавничий центр НТУ „ХПI”, 61002 Харків, вул. Фрунзе, 21
Свідоцтво про реєстрацію ДК №116 від 10.07.2000 р.
Друкарня НТУ „ХПI”, 61002 Харків, вул. Фрунзе, 21