УДК 681.3.07 C.Ю. Беляев, А.К. Виноградов, СПбГПУ
реклама

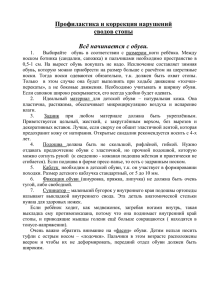
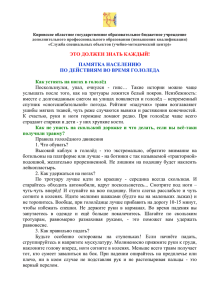
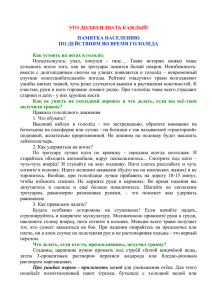
УДК 681.3.07 C.Ю. Беляев, А.К. Виноградов, СПбГПУ ПРИМЕНЕНИЕ МАСС-ПРУЖИННОЙ МОДЕЛИ ОБУВИ ДЛЯ ЕЕ ВИРТУАЛЬНОЙ ПРИМЕРКИ Продажа товаров в Интернете является стремительно развивающейся отраслью. Одним из сегментов данного рынка является онлайновая торговля обувью. В таком магазине покупатель не имеет возможности примерить выбранную модель, поэтому продавцы терпят огромные убытки из-за возврата товаров. По данным маркетологов, число возвратов моделей, не подошедших покупателям, достигает 50% от общего числа заказов. Один из способов уменьшить процент возвратов – предоставить покупателю возможность, не совершая заказ, оценить, подойдёт ли ему выбранная модель обуви его размера путем «виртуальной примерки». Характеристики ноги, такие как ширина стопы и высота подъема, у каждого человека индивидуальны – поэтому виртуальная примерка обуви должна опираться на соответствующие величины. Обзор существующих методов Существующие методы виртуальной оценки комфортности ношения обуви делятся на 2 типа: геометрические и физические. Геометрические методы, например [1], основываются на технике динамики свободных форм (Free-Form Deformation). Преимуществом данных методов является простота реализации и скорость работы. Но при этом они обладают двумя серьезными недостатками: сложность подбора параметров для реалистичной деформации материала обуви при контакте с ногой, а также отсутствие возможности расчета физических величин, таких как давление. Существующие физические методы используют метод конечных элементов [2]. При этом расчеты проводятся при помощи таких пакетов, как ANSYS и др. Данные методы дают результаты высокой точности, но не могут быть применены в веб-сервисах из-за высокой вычислительной сложности. Цель работы Разработать метод виртуальной оценки комфортности ношения покупателем выбранной в интернет-магазине модели обуви с учетом индивидуальных характеристик его стопы. Важным требованием является возможность использовать полученный подход в существующих решениях интернет-магазинов, т.е. время отклика должно быть комфортным для пользователя (1-3 секунды) при сохранении требуемой точности результата. Полученные результаты Для того чтобы оценить, комфортно ли будет носить выбранную обувь, можно рассчитать давления со стороны ботинка на ногу в специально подобранном наборе контрольных точек [6] (Рис. 1). В момент примерки обувь подвержена деформации со стороны ступни, поэтому для оценки величины давления на ногу необходимо найти оптимальное расположение ноги человека в выбранной модели сначала без учета, а затем с учетом деформации материала. Нами разработаны два алгоритма оптимального позиционирования виртуальной модели ноги в виртуальной модели ботинка: оптимального позиционирования ноги в обуви путем минимизации величины проникновения недеформируемой модели ноги в недеформируемую модель обуви (геометрическое позиционирование) и оптимального позиционирования ноги в обуви путем минимизации сил давления на ногу со стороны деформируемой модели обуви (физическое позиционирование). Для моделирования поведения материала обуви при контакте с ногой, а также для расчета давлений, он представляется в виде масс-пружинной модели [3], после чего для проведения физической симуляции к ней применяется метод динамики, основанный на перемещениях [4, 5]. Для проведения оценки комфортности наш метод использует трехмерную модель ноги, построенную по предоставленным пользователем замерам стопы с помощью техники динамики свободных форм[1], и трехмерную модель обуви, которую он выбрал. Рис. 1 Контрольные точки ноги, в которых проводятся замеры давлений Оптимальное позиционирование Перед началом позиционирования мы располагаем систему координат, таким образом, чтобы задняя сторона пятка находилась в начале координат, а ось была направлена вдоль стопы (Рис. 2). Далее мы считаем, что нога зафиксирована в пятке и совершает только вращение вокруг оси . Рис. 2 Расположение ноги относительно координатных осей На Рис. 3 видно, что недеформируемая модель обуви проникает в модель ноги. С физической точки зрения, в тот момент, когда ступня человека будет помещена в данную модель обуви, в зонах проникновения возможно возникновение сил, которые будут стремиться повернуть ногу таким образом, чтобы суммарные значения слева и справа относительно оси сравнялись. Для достижения оптимального геометрического позиционирования мы поворачиваем модель ноги таким образом, чтобы моменты возникающих сил сравнялись относительно оси . После выполнения поворота зоны проникновения устраняются путем выталкивания материала ботинка из ноги. В этот момент в нем возникают внутренние силы, пытающиеся восстановить исходную форму. Данные силы обусловлены сопротивлениями к растяжению, сдвигу и изгибу. Возникающие силы оказывают давление на ногу, создавая ранее указанные моменты. Рис. 3 Исходное положение ноги (слева); положение ноги после геометрического позиционирования (по центру); положение ноги после физического позиционирования (справа) Расчет давлений со стороны обуви на ногу После того, как найдено оптимальное положение ноги в ботинке, можно рассчитать давления, оказываемые им на ногу. Для этого, в каждом узле масс-пружинной модели можно вычислить возникающие в нем внутренние силы, препятствующие растяжению, сдвигу и изгибу. Проецируя полученные силы на нормаль в соответствующих узлам масс-пружинной модели вершинах полигональной сети, мы получаем силы, действующие на ногу со стороны ботинка. Для вычисления давлений в точках ноги, ближайших к вершинам ботинка, мы можем разделить модуль силы, действующей в вершине ботинка, на площадь, ассоциированную с точкой ноги. Рис. 4 Пример расчета давлений: красные зоны – сильное давление, желтые – среднее, синие - слабое Выводы В результате проведенной работы разработан метод оценки комфортности ношения выбранной модели обуви, заключающийся в применении масс-пружинной модели обуви и метода динамики, основанной на перемещениях. Результаты экспериментов показали, что время работы метода на современном компьютере с конфигурацией Intel Core i7, 16 Gb RAM составляет 0,9 с, что позволяет встроить реализованный метод в существующие решения Интернет магазинов. Список литературы [1] Masaaki Mochimaru, Makiko Kouchi, Masako Dohi, “Analysis of 3-D human foot forms using the Free Form Deformation method and its application in grading shoe lasts”, Ergonomics, vol. 42, no. 9, 2000. [2] Maria Jose Rupérez Moreno, “Multidisciplinary techniques for the simulation of the contact between the foot and the shoe upper in gait: virtual reality, computational biomechanics, and artificial neural networks”, Valencia University, 2011 [3] Adrian R. Goldenthal. “Implicit Treatment of Constraints for Cloth Simulation”, Hebrew University, 2010. [4] Matthias Muller, Bruno Heidelberger, Marcus Hennix, John Ratcliff. “Position Based Dynamics”, “VRIPHYS”, 2006. [5] Matthias Muller, Jos Stam, Doug James, Nils Thurey. “Real Time Physics Class Notes”, SIGGRAPH, 2008. [6] M.J. Rupérez, C. Monserrat, S. Alemany, M.C. Juan, M. Alcañíz , “Contact model, fit process and foot animation for the virtual simulator of the footwear comfort”, Computer-Aided Design 42, 2010, pp. 425-431.