Модель динамики населения птиц для мониторинга пойменных
реклама

Ñèáèðñêèé ýêîëîãè÷åñêèé æóðíàë, 5 (2010) 781788
ÓÄÊ 502.7:551.215(282.251.1)
Ìîäåëü äèíàìèêè íàñåëåíèÿ ïòèö äëÿ ìîíèòîðèíãà
ïîéìåííûõ ýêîñèñòåì (íà ïðèìåðå cðåäíåé Îáè).
Ñîîáùåíèå 2
Â. Ï. ÁÎËÎÒÍÎÂ, À. Ì. ÀÄÀÌ*
Þãîðñêèé ãîñóäàðñòâåííûé óíèâåðñèòåò
628012, Õàíòû-Ìàíñèéñê, óë. ×åõîâà, 16
E-mail: bolotnov07@mail.ru
*Äåïàðòàìåíò ïðèðîäíûõ ðåñóðñîâ
è îõðàíû îêðóæàþùåé ñðåäû Òîìñêîé îáëàñòè
634050, Òîìñê, ïðîñï. Ëåíèíà, 1
ÀÍÍÎÒÀÖÈß
Ðàçðàáîòàíà ìîäåëü äèíàìèêè íàñåëåíèÿ ïòèö â ïîéìå ðåêè ñ öåëüþ îðãàíèçàöèè ìîíèòîðèíãà
ïîéìåííûõ ýêîñèñòåì, îñíîâàííàÿ íà ïðèíöèïàõ ñèñòåìíîé äèíàìèêè, ñôîðìóëèðîâàííûõ Ä. Ôîððåñòåðîì. Äëÿ ýòîãî èñïîëüçîâàí äëèòåëüíûé ðÿä íàáëþäåíèé (19772000 ãã.) â âåñåííå-ëåòíèé ïåðèîä â
ïîéìå ñðåäíåé Îáè â Êîëïàøåâñêîì ðàéîíå Òîìñêîé îáëàñòè, ÷òî ïîçâîëèëî óëó÷øèòü ñòðóêòóðó
ìîäåëè. Ìîäåëü ðåàëèçîâàíà ñ ïîìîùüþ ïàêåòà MATLAB 5.2.1. Ìîäåëèðîâàíèå ïîäòâåðäèëî ãèïîòåçó
î òîì, ÷òî ãèäðîëîãè÷åñêèé ðåæèì ÿâëÿåòñÿ ãëàâíûì ôàêòîðîì, îïðåäåëÿþùèì äèíàìèêó è ñòðóêòóðó íàñåëåíèÿ ïòèö â ïîéìå ñðåäíåé Îáè.
Êëþ÷åâûå ñëîâà: ñîîáùåñòâî ïòèö, ïîéìà ñðåäíåé Îáè, áàçîâàÿ ìîäåëü, èìèòàöèîííîå ìîäåëèðîâàíèå, âëèÿíèå ãèäðîðåæèìà.
Ìàòåìàòè÷åñêîå îïèñàíèå îñíîâíûõ ïðîöåññîâ è ðåçóëüòàòû ìîäåëèðîâàíèÿ. Äëÿ
îïèñàíèÿ àíàëèòè÷åñêîé ñòðóêòóðû ìîäåëè,
âûðàæàþùåé êîëè÷åñòâåííûå îòíîøåíèÿ
ìåæäó âíåøíèìè è âñïîìîãàòåëüíûìè ïåðåìåííûìè ñîñòîÿíèÿ, ïðèìåíåí ìåòîä êîíå÷íî-ðàçíîñòíîé àïïðîêñèìàöèè. Âíåøíèå ïåðåìåííûå ìîäåëè HI, FM, TR, MG, UV çàäàíû
êàê ôóíêöèè îò âðåìåíè t. Ïëîòíîñòü íàñåëåíèÿ ïòèö â ëþáîé ìîìåíò âðåìåíè çàäàíà
êàê ïëîòíîñòü â ïðåäøåñòâóþùèé ìîìåíò
âðåìåíè ïëþñ ïëîòíîñòü, êîòîðàÿ äîáàâëÿåòñÿ çà ñ÷åò òåìïà TPP, è ìèíóñ ïëîòíîñòü,
óáûâàþùàÿ çà ñ÷åò òåìïà TDP â îõâàòûâàåìûé ïåðèîä.
Áîëîòíîâ Âëàäèìèð Ïåòðîâè÷
Àäàì Àëåêñàíäð Ìàðòûíîâè÷
Pt Pt 1 (TPPt 1,t TDPt 1,t ) t ,
ãäå Pt ïëîòíîñòü íàñåëåíèÿ ïòèö â òåêóùèé ìîìåíò âðåìåíè, îñîá./êì2; Pt1 ïëîòíîñòü íàñåëåíèÿ ïòèö â ïðåäøåñòâóþùèé
ìîìåíò âðåìåíè, îñîá./êì2; TPPt1,t òåìï
ïðèðîñòà ïëîòíîñòè íà èíòåðâàëå âðåìåíè
t = {t 1, t}, îñîá./êì 2; TDP t1,t òåìï
óìåíüøåíèÿ ïëîòíîñòè íà èíòåðâàëå t =
= {t 1, t} (îñîá./êì2); t âðåìåííîé èíòåðâàë èëè âðåìåííîé øàã.
Òåìï ïðèðîñòà ïëîòíîñòè ïðåäñòàâëÿåò
ñîáîé ñîñòàâíóþ ÷àñòü ïåòëè ïîëîæèòåëüíîé
îáðàòíîé ñâÿçè. Áàçèñíûé (îñíîâíîé) òåìï
ïðèðîñòà çàâèñèò îò ïëîòíîñòè (P) è íîðìàëüíîãî òåìïà ïðèðîñòà ïëîòíîñòè (NTPP). Îäíàêî ðåàëüíûé òåìï ïðèðîñòà ïëîòíîñòè íàñåëåíèÿ çàâèñèò åùå è îò óñëîâèé â äðóãèõ
%&
÷àñòÿõ ñèñòåìû (àíòðîïîãåííîãî ôàêòîðà,
ãèäðîëîãè÷åñêîãî ðåæèìà è äð.). Âëèÿíèå ñî
ñòîðîíû äðóãèõ ÷àñòåé ñèñòåìû ââîäèòñÿ ìíîæèòåëÿìè, êîòîðûå ìîäèôèöèðóþò áàçèñíûé
òåìï ïðèðîñòà ïëîòíîñòè íàñåëåíèÿ ïòèö. Ïðè
íîðìàëüíûõ óñëîâèÿõ, êîòîðûå ïðè ñðàâíåíèè ïðèíèìàþòñÿ çà îòïðàâíóþ òî÷êó, ìíîæèòåëè íå äîëæíû èçìåíÿòü áàçèñíûé òåìï
ïðèðîñòà ïëîòíîñòè íàñåëåíèÿ ïòèö è ðàâíû
åäèíèöå. Äàëüøå îíè ìîãóò ïðèíèìàòü çíà÷åíèÿ áîëüøå èëè ìåíüøå åäèíèöû. Óðàâíåíèå TPP èìååò âèä:
TPPt,t 1 Pt NTPP MTPF MTPS MPDP
MPMG MPFM ,
ãäå TPPt,t+1 òåìï ïðèðîñòà ïëîòíîñòè íà
ïîñëåäóþùåì èíòåðâàëå, îñîá./êì2; Pt ïëîòíîñòü â òåêóùèé ìîìåíò, îñîá./êì2; NTPP
íîðìàëüíûé òåìï ïðèðîñòà ïëîòíîñòè, 1/t;
MTPF ìíîæèòåëü çàâèñèìîñòè òåìïà ïðèðîñòà îò àíòðîïîãåííûõ ôàêòîðîâ; MTPS
ìíîæèòåëü çàâèñèìîñòè òåìïà ïðèðîñòà îò
îñòàòî÷íîé ïëîùàäè; MPDP ìíîæèòåëü çàâèñèìîñòè òåìïà ïðèðîñòà îò äëèòåëüíîñòè
ïàâîäêà; MPMG ìíîæèòåëü çàâèñèìîñòè
òåìïà ïðèðîñòà îò ìèãðàöèé; MPFM ìíîæèòåëü çàâèñèìîñòè òåìïà ïðèðîñòà îò ôèòîìàññû.
Òåìï óìåíüøåíèÿ ïëîòíîñòè íàñåëåíèÿ
ïòèö ïðåäñòàâëÿåò ñîáîé ñîñòàâíóþ ÷àñòü îòðèöàòåëüíîé îáðàòíîé ñâÿçè. Áàçèñíûé òåìï
óìåíüøåíèÿ ðàâåí ïëîòíîñòè P, óìíîæåííîé
íà íîðìàëüíûé òåìï óìåíüøåíèÿ ïëîòíîñòè
NTDP. Ðåàëüíûé òåìï óìåíüøåíèÿ çàâèñèò
îò óñëîâèé â äðóãèõ ÷àñòÿõ ñèñòåìû. Ìåëèîðàöèÿ, õèùíè÷åñòâî, ãèäðîëîãè÷åñêèé è òåìïåðàòóðíûé ðåæèìû è ôèòîìàññà ëóãîâ âëèÿþò íà TDP ïîñðåäñòâîì ìíîæèòåëåé. Óðàâíåíèå TDP èìååò âèä:
TDPt ,t 1 Pt NTDP MTDS MDDP MTDT
MDHI MDFM MTDM MDMG,
ãäå TDPt,t+1 òåìï óìåíüøåíèÿ ïëîòíîñòè íà
ïîñëåäóþùåì èíòåðâàëå, îñîá./êì2; MTDS
ìíîæèòåëü çàâèñèìîñòè òåìïà óìåíüøåíèÿ îò
îñòàòî÷íîé ïëîòíîñòè; MDDP ìíîæèòåëü
çàâèñèìîñòè òåìïà óìåíüøåíèÿ îò äëèòåëüíîñòè ïàâîäêà; MTDT ìíîæèòåëü çàâèñèìîñòè òåìïà óìåíüøåíèÿ îò òåìïåðàòóðû;
MDHI ìíîæèòåëü çàâèñèìîñòè òåìïà óìåíüøåíèÿ îò õèùíè÷åñòâà; MDFM ìíîæèòåëü
%&
çàâèñèìîñòè òåìïà óìåíüøåíèÿ îò ôèòîìàññû; MTDM ìíîæèòåëü çàâèñèìîñòè òåìïà
óìåíüøåíèÿ îò ìåëèîðàöèè; MDMG ìíîæèòåëü çàâèñèìîñòè òåìïà óìåíüøåíèÿ îò
ìèãðàöèè.
Àíòðîïîãåííûé ôàêòîð â ìîäåëè âêëþ÷åí
â ïåòëþ ïîëîæèòåëüíîé îáðàòíîé ñâÿçè ñ
óðîâíåì P. Ïðåäïîëàãàåòñÿ, ÷òî ïåðåìåííàÿ
AF ÿâëÿåòñÿ ìîíîòîííî âîçðàñòàþùåé ôóíêöèåé âðåìåíè. Òàêèì îáðàçîì, â íàñòîÿùèé
ìîìåíò âðåìåíè îíà îïðåäåëÿåòñÿ åãî çíà÷åíèåì â ïðåäûäóùèé ìîìåíò âðåìåíè ïëþñ
óñèëåíèÿ TUF:
AF t AF t 1 TUF t 1,t t,
ãäå AF t, AF t1 çíà÷åíèå àíòðîïîãåííûõ
ôàêòîðîâ â òåêóùèé è ïðåäøåñòâóþùèé ìîìåíòû âðåìåíè; TUFt1,t òåìï óñèëåíèÿ
ôàêòîðà íà ïðåäøåñòâóþùåì èíòåðâàëå 1/t;
Òåìï óñèëåíèÿ TUF ðàâåí áàçèñíîìó òåìïó èëè â äàííîì ñëó÷àå íîðìàëüíîìó òåìïó
óñèëåíèÿ àíòðîïîãåííîãî ôàêòîðà, óìíîæåííîìó íà ìíîæèòåëü çàâèñèìîñòè TUF îò ïëîòíîñòè (MTUP). Ýòîò ìíîæèòåëü â íîðìàëüíûõ
óñëîâèÿõ ðàâåí åäèíèöå è íà÷èíàåò ðàáîòàòü
â ýêñòðåìàëüíîé ñèòóàöèè, êîãäà ðåçêî ñíèæàåòñÿ ïëîòíîñòü íàñåëåíèÿ ïòèö:
TUF t ,t 1 NTUF MTUPt ,
ãäå TUFt,t+1 òåìï óñèëåíèÿ ôàêòîðà íà ïîñëåäóþùåì èíòåðâàëå 1/t; NTUF íîðìàëüíîå çíà÷åíèå àíòðîïîãåííîãî ôàêòîðà 1/t;
MTUPt çíà÷åíèå ìíîæèòåëÿ MTUP â òåêóùèé ìîìåíò âðåìåíè.
Ðàññìîòðèì òåïåðü ìàòåìàòè÷åñêîå îïèñàíèå âñïîìîãàòåëüíûõ ïåðåìåííûõ: ïåðåìåííàÿ UV ÿâëÿåòñÿ ôóíêöèåé âðåìåíè è çàäàåòñÿ àïðèîðè: UV = F(t), ïåðåìåííàÿ TR
òàêæå ÿâëÿåòñÿ ïðîãíîçèðóåìîé ôóíêöèåé
âðåìåíè TR = Ô(t).
 ìîäåëè ïåðåìåííàÿ HI îïðåäåëÿåòñÿ åå
çíà÷åíèåì â íîðìàëüíûõ óñëîâèÿõ è ñîñòîÿíèåì äâóõ ìíîæèòåëåé â êîíêðåòíûé ìîìåíò
âðåìåíè, ò. å.
HI t NHI MHSOt MHIF t ,
ãäå HIt è NHI ïîêàçàòåëè õèùíè÷åñòâà â
òåêóùèé ìîìåíò âðåìåíè è ñîîòâåòñòâóþùèå
íîðìàëüíûì óñëîâèÿì; MHSOt, MHIFt ìíîæèòåëè çàâèñèìîñòè õèùíè÷åñòâà îò îñòàòî÷íîé ïëîùàäè è àíòðîïîãåííîãî ôàêòîðà.
Äëèòåëüíîñòü çàòîïëåíèÿ ïîéìû ïîëîâîäüåì è îñòàòî÷íàÿ ïëîùàäü çàâèñÿò òîëüêî
îò óðîâíÿ âîäû:
DP (UV ), SO (UV ), MG (UV ).
Ïåðåìåííàÿ Ì â ìîäåëè ïðåäñòàâëåíà îòS
íîñèòåëüíîé âåëè÷èíîé m , ãäå Sm ïëîS
ùàäü ìåëèîðàòèâíûõ çåìåëü, S ïëîùàäü
Êîëïàøåâñêîãî ðàéîíà.
Ïîêàçàòåëü ôèòîìàññû â òåêóùèé ìîìåíò
âðåìåíè îïðåäåëÿåòñÿ åå íîðìàëüíûì çíà÷åíèåì, óìíîæåííûì íà ìíîæèòåëü çàâèñèìîñòè ôèòîìàññû ëóãîâ îò äëèòåëüíîñòè ïàâîäêà (MPFU):
FMt NFM MFDPt ,
ãäå FMt ôèòîìàññà â ìîìåíò âðåìåíè t,
ö/ãà; NFM íîðìàëüíîå çíà÷åíèå ôèòîìàññû, ö/ãà; MFDPt ìíîæèòåëü çàâèñèìîñòè
ôèòîìàññû îò äëèòåëüíîñòè ïîëîâîäüÿ â òåêóùèé ìîìåíò âðåìåíè.
Óðàâíåíèå íà÷àëüíûõ óñëîâèé çàïèñûâàåòñÿ ñëåäóþùèì îáðàçîì: t0 íà÷àëüíàÿ òî÷êà îòñ÷åòà, P0 íà÷àëüíàÿ ïëîòíîñòü íàñåëåíèÿ ïòèö, îñîá./êì2.
Çíà÷åíèÿ TPP, TDP è TUF, íåîáõîäèìûå
äëÿ ïåðâîãî ïðîñ÷åòà ìîäåëè, èìåþò âèä:
TPPt0 ,t0 1 P0 NTPP MTPF MTPS MPDP
MPMG MPFM ;
TDPt0 ,t0 1 P0 NTDP MTDS MDDP MTDT
MDHI MDFM MTDM MDMG;
TUF t0 ,t0 1 NTUF MTUP t0 ;
AF t0 AF0 ;
P t P t 1 (TPP t 1,t TDP t 1,t ) Ät ;
TPPt,t 1 Pt NTPP MTPF MTPS MPDP
MPMG MPFM ;
TDPt,t 1 Pt NTDP MTDS MDDP MTDT
MDHI MDFM MTDM MDMG;
AF t AF t 1 TUF t 1,t Ät;
TUF t ,t 1 NTUF MTUPt ,
UV F (t );
DP Ø(UV );
SO (UV );
TPPt0 ,t0 1 P0 NTPP MTPS MPDP
MTPF MPPM,
TDPt0 ,t0 1 P0 NTDP MTDS MDDP
MTDT MDHI MDFM MTDM,
TUF t0 ,t0 1 NTUF MTUPt0 .
 ñèñòåìå èñïîëüçóþòñÿ ñëåäóþùèå òèïû
óðàâíåíèé: óðîâíåé, òåìïîâ, âñïîìîãàòåëüíûå (îïèñûâàþùèå âñïîìîãàòåëüíûå ïåðåìåííûå) è íà÷àëüíûõ óñëîâèé.
Ïðè ðàññìîòðåíèè êàêîãî-ëèáî èíòåðâàëà âðåìåíè â ïåðâóþ î÷åðåäü ðåøàþòñÿ óðàâíåíèÿ óðîâíåé (ñ÷èòàåòñÿ, ÷òî óðàâíåíèÿ
íà÷àëüíûõ óñëîâèé ðåøåíû çàðàíåå). Çàòåì
ïîëó÷åííûå ðåçóëüòàòû èñïîëüçóþòñÿ â
óðàâíåíèè òåìïîâ. Âñïîìîãàòåëüíûå óðàâíåíèÿ ââîäÿòñÿ äëÿ óäîáñòâà è ðåøàþòñÿ ñðàçó ïîñëå ðåøåíèÿ óðàâíåíèé óðîâíåé.
Îáùàÿ ñõåìà óðàâíåíèé èìååò âèä:
Pt0 P0 ;
Ðèñ. 1. Ëîãè÷åñêàÿ ñõåìà âû÷èñëèòåëüíîãî ïðîöåññà ñèñòåìû óðàâíåíèé
%&!
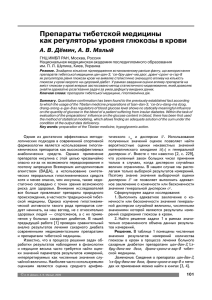
Ðèñ. 2. Áàçîâàÿ ìîäåëü äèíàìèêè íàñåëåíèÿ ïòèö â ïîéìå ð. Îáè, ðåàëèçîâàííàÿ ñ ïîìîùüþ ïàêåòà
MATLAB 5.2.1
Ðèñ. 3. Áëîê Äèíàìèêà íàñåëåíèÿ ïòèö
%&"
%&#
Ðèñ. 4. Áëîê Àíòðîïîãåííûé ôàêòîð
%&$
Ðèñ. 5. Áëîê Ïðèðîäíàÿ ñðåäà
TR = Ô(t);
MG Ë(UV );
HI t NHI MHSO t MHIF t ;
M = f(t);
t
FM NFM MFDPt .
Îðãàíèçàöèÿ öèêëà âû÷èñëåíèé âûïîëíåíà ïî ñõåìå (ðèñ. 1). Çíà÷åíèå ëþáîãî ìíîæèòåëÿ âûáèðàåòñÿ àâòîìàòè÷åñêè èç ñîñòàâëåííûõ òàáëèö ìíîæèòåëåé çà êàæäûé ãîä.
Ìîäåëü ðåàëèçîâàíà òàêæå ñ ïîìîùüþ ïàêåòà MATLAB 5.2.1. [1, 2]. Âûáîð ýòîãî ïàêåòà îáóñëîâëåí òåì, ÷òî îí âêëþ÷àåò â ñåáÿ
ñèñòåìó âèçóàëüíîãî ìîäåëèðîâàíèÿ SIMULINK. SIMULINK ïîçâîëÿåò ñî÷åòàòü äâà îñíîâíûõ ïîäõîäà ê ñîçäàíèþ ìîäåëè: àíàëèòè÷åñêèé è èìèòàöèîííûé, ðàññìàòðèâàòü íåëèíåéíûå çàäà÷è ñ íåïðåðûâíûì è äèñêðåòíûì âðåìåíåì.  SIMULINK èìååòñÿ áèáëèîòåêà áëîêîâ, êîòîðûå ÿâëÿþòñÿ ñðåäñòâàìè
äëÿ ðàçðàáîòêè è ïîñòðîåíèÿ ìîäåëåé (S-ìîäåëåé). Ìîæíî ñîçäàâàòü íîâûå ýëåìåíòû è
ãðóïïèðîâàòü èõ â áëîêè è ñîçäàâàòü èåðàðõè÷åñêèå ìîäåëè. Äîïóñêàåòñÿ ïîñòðîåíèå Sìîäåëåé ñ èåðàðõè÷åñêîé ñòðóêòóðîé íåîãðàíè÷åííîé âëîæåííîñòè. Ðåçóëüòàòû ìîæíî âûâîäèòü êàê â ãðàôè÷åñêîì, òàê è â öèôðîâîì
âèäå. Ïðîöåññ ïîñòðîåíèÿ S-ìîäåëåé ñðåäñòâàìè SIMULINK çàêëþ÷àåòñÿ â ñáîðêå ñõåìû
èç áëîêîâ, õðàíÿùèõñÿ â áèáëèîòåêå
SIMULINK. Äëÿ ñáîðêè S-ìîäåëè èñïîëüçóåòñÿ òåõíîëîãèÿ Drag-and-Drop (ïåðåòàùè è
âñòàâü), ÷òî îáëåã÷àåò ðàáîòó íàä ìîäåëüþ.
S-ìîäåëü, èìåþùàÿ èåðàðõè÷åñêóþ ñòðóêòóðó è âêëþ÷àþùàÿ â ñåáÿ òðè îñíîâíûõ áëî-
êà è ñâÿçè ìåæäó íèìè: Äèíàìèêè ïëîòíîñòè íàñåëåíèÿ ïòèö, Àíòðîïîãåííûé ôàêòîð
è Ïðèðîäíàÿ ñðåäà, êàæäûé èç êîòîðûõ ÿâëÿåòñÿ ìîäåëüþ áîëåå íèçêîãî óðîâíÿ, ïîêàçàíà íà ðèñ. 25.
Êîëè÷åñòâåííîå ïðåäñòàâëåíèå óðîâíåâûõ, òåìïîâûõ è âñïîìîãàòåëüíûõ ïåðåìåííûõ îñóùåñòâëÿëîñü íà îñíîâå ýêñïåðèìåíòàëüíûõ äàííûõ î ðåàëüíîé ñèñòåìå. Ïðè îïðåäåëåíèè êîíñòàíò è ïåðåìåííûõ â êà÷åñòâå
òî÷åê îòñ÷åòà âçÿòû óñëîâèÿ 1977 ã., ò. å. ñîñòîÿíèå ñèñòåìû îïèñûâàëîñü ïî îòíîøåíèþ
ê ýòîìó ãîäó. Äèíàìèêà ïëîòíîñòè íàñåëåíèÿ
ïòèö ïðîñëåæèâàëàñü íà îòðåçêå âðåìåíè ñ
19772000 ãã., ïðè÷åì ðàññìàòðèâàëñÿ âåñåííå-ëåòíèé ïåðèîä â óñëîâèÿõ êàæäîãî ãîäà.
Øàã ìîäåëèðîâàíèÿ ïðèíÿò ðàâíûì îäíîìó
ãîäó. Âñå ïåðåìåííûå ìîäåëè õàðàêòåðèçîâàëèñü îòíîñèòåëüíûìè âåëè÷èíàìè.
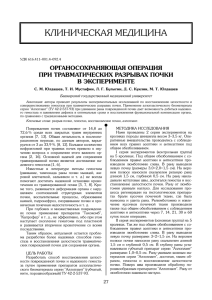
Ðåçóëüòàòû, ïîëó÷åííûå ïðè ìîäåëèðîâàíèè, ïðåäñòàâëåííûå íà ðèñ. 6, ïîäòâåðäèëè ïðåäïîëîæåíèå î òîì, ÷òî ãèäðîëîãè÷åñêèé ðåæèì ÿâëÿåòñÿ ãëàâíûì ôàêòîðîì,
ðåãóëèðóþùèì ÷èñëåííîñòü ïòèö. Èç àíàëèçà ïîëó÷åííûõ äàííûõ ñëåäóåò, ÷òî ìàêñèìàëüíóþ ïëîòíîñòü ïòèö â ïîéìå ñðåäíåé Îáè
îïðåäåëÿþò ïîëîâîäüÿ 50 % îáåñïå÷åííîñòè, à ìèíèìàëüíîå çíà÷åíèå ïëîòíîñòè îïðåäåëÿþò íèçêèå ïîëîâîäüÿ ìåíåå 75 %
îáåñïå÷åííîñòè è âûñîêèå ïîëîâîäüÿ áîëåå 25 % îáåñïå÷åííîñòè. Ðàçâèòèå ìåëèîðàöèè ñîêðàòèëî ñðîêè çàòîïëåíèÿ ïîéìû,
íàðåçàíèå êàíàëîâ ïðèâåëî ê óâåëè÷åíèþ âîäîïëàâàþùèõ è îêîëîâîäíûõ ãðóïï ïòèö â
ïåðâóþ ïîëîâèíó ëåòà, à áûñòðîå îáñûõàíèå
ïîéìû ïðèâëåêàëî ïòèö ðàçíîòðàâíûõ ëóãîâ.
Ðèñ. 6. Ñîîòíîøåíèå îñíîâíûõ âåëè÷èí, õàðàêòåðèçóþùèõ ñîñòîÿíèå îðíèòîêîìïëåêñà, ïðè èçìåíåíèè àíòðîïîãåííîãî ôàêòîðà: 1 AF, 2 UV, 3 P
%&%
Îäíàêî ôàêòîð áåñïîêîéñòâà, óíè÷òîæåíèÿ
ãíåçä, îáóñëîâëåííûé ðàáîòîé òåõíèêè, ïðèâåëè ê ñîêðàùåíèþ ïëîòíîñòè íàñåëåíèÿ ïòèö
19901997 ãã. è ïåðåñòðîéêå ñòðóêòóðû ñîîáùåñòâà ïòèö â öåëîì.
ÇÀÊËÞ×ÅÍÈÅ
Àíòðîïîãåííûå âîçäåéñòâèÿ, ñâÿçàííûå ñ
÷àñòè÷íûì èçìåíåíèåì ãèäðîëîãè÷åñêîãî ðåæèìà è õîçÿéñòâåííûì èñïîëüçîâàíèåì ïîéìåííûõ çåìåëü ïðè óìåðåííûõ ìàñøòàáàõ
ìåëèîðàöèè, íå îêàçûâàþò ñóùåñòâåííîãî
âëèÿíèÿ íà äèíàìèêó ïòèö. Åñëè ïëîùàäü ìåëèîðàòèâíûõ ðàáîò óâåëè÷èòñÿ äî 50 % îò
îáùåé ïëîùàäè ïîéìû, òî ñëîæèâøàÿñÿ ýêîñèñòåìà áóäåò ðàçðóøàòüñÿ â óñëîâèÿõ ñàìûõ íèçêèõ ïàâîäêîâ (75 % îáåñïå÷åííîñòè
è íèæå) è íå ñìîæåò âîññòàíàâëèâàòüñÿ íà
ïðîòÿæåíèè 4 ëåò. Íåîáõîäèìî êîíòðîëèðîâàòü ìàñøòàáû ìåëèîðàòèâíûõ ðàáîò è íå äî-
ïóñêàòü â ñèñòåìå íà÷àëà íåîáðàòèìûõ ðàçðóøèòåëüíûõ ïðîöåññîâ.
Ïîñòðîåííàÿ ìîäåëü èìååò òåîðåòè÷åñêèé
è ïðèêëàäíîé õàðàêòåð. Ñòðóêòóðó ìîäåëè
ìîæíî èñïîëüçîâàòü êàê áàçîâóþ äëÿ áèîòè÷åñêèõ êîìïîíåíòîâ ïîéìåííîé ýêîñèñòåìû
ïðè ïðîãíîçèðîâàíèè îñíîâíûõ òåíäåíöèé èõ
ïîâåäåíèÿ è ìîíèòîðèíãà. Îíà âûïîëíåíà äëÿ
êîìïîíåíòà, êîòîðûé èãðàåò èíäèêàöèîííóþ
ðîëü. Ââåäåíèå îïðåäåëåííûõ èçìåíåíèé â
ïîêàçàòåëè âîäíîãî ðåæèìà ïîçâîëÿåò óñòàíîâèòü âåðõíèé è íèæíèé ïðåäåëû, ïðè ïåðåõîäå ÷åðåç êîòîðûå íà÷èíàåòñÿ îáùàÿ ïåðåñòðîéêà ïîéìåííîé ýêîñèñòåìû â öåëîì.
ËÈÒÅÐÀÒÓÐÀ
1. Ãóëüòÿåâ À. Ê. MATLAB 5.2.1. Èìèòàöèîííîå ìîäåëèðîâàíèå â ñðåäå Windows: Ïðàêòè÷åñêîå ïîñîáèå.
ÑÏá.: ÊÎÐÎÍÀ ïðèíò, 1999. 288 ñ.
2. Äüÿêîíîâ Â. Ï., Àáðàìåíêîâà È. Â., Êðóãëîâ Â. Â..
MATLAB 5.2.1 ñ ïàêåòàìè ðàñøèðåíèé. Ì.: Íîëèäæ,
2001, 880 ñ.
Model of the Dynamics of Bird Population for Floodplain Ecosystem
Monitoring (for the Middle Reach of the Ob as Example)
Communication 2
V. P. BOLOTNOV, A. M. ADAM*
Yugra State University
628012, Khanty-Mansiysk, Chekhov str., 16
E-mail: bolotnov07@mail.ru
*Department of n atural resources and environmental protection of the Tomsk Region
634050, Tomsk, Lenin ave., 1
Model of the dynàmics of bird population in the floodplain of the river was developed for the purpose
of establishing monitoring of floodplain ecosystems. The model is based on the princi ples of system
dyn amics formulated by D. Forrester. Long-term observations (19772000) during spring and summer in
the floodplain of the middle Ob in the Kolpashevo district of the Tomsk Region were used for this
purpose, which allowed us to improve the structure of the model. The model was realized with the help
of MATLAB 5.2.1 package. Modeling confirmed the hypothesis that the hydrological regime is the main
factor determining the dyn amics and structure of bird population in the floodplain of the middle Ob.
Key words: bird community, the middle Ob floodplain, basic model, imitation modeling effect of
hydroregime.
%&&