Система стабилизации потока органической фазы каскада
реклама

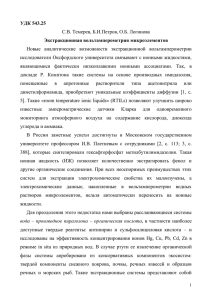
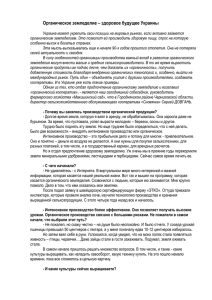
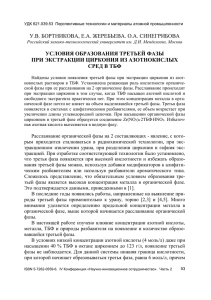
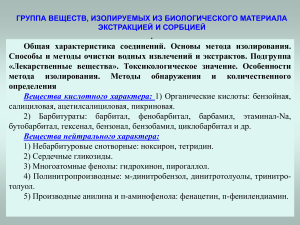
СИСТЕМА СТАБИЛИЗАЦИИ ПОТОКА ОРГАНИЧЕСКОЙ ФАЗЫ КАСКАДА ЭКСТРАКЦИОННЫХ КОЛОНН С ПРИМЕНЕНИЕМ ЧАСТОТНОГО УПРАВЛЕНИЯ ПОГРУЖНЫМИ ЦЕНТРОБЕЖНЫМИ НАСОСАМИ Биянов А.В., Горюнов А.Г., Иванов К.А., Шенцов Э.Ю. ГОУ ВПО «Национальный исследовательский Томский политехнический университет», г. Томск E-mail: 22leksey@mail.ru Поток органической фазы в каскаде экстракционных колонн оказывает существенное влияние на процессы экстракции и реэкстракции урана, задает производительность каскада. Нестабильность потока приводит к различного рода негативным последствиям, таким как перерасход реагентов, аварийное отключение насосов или снижение качества конечного продукта. Существующая система стабилизации потока органической фазы установки М-1345 включает четыре буферные емкости и установленные в них погружные центробежные насосы. Органическая фаза самотеком поступает из верхних отстойных зон колонн в буферные емкости, откуда откачивается центробежными насосами. Управление расходами осуществляется путем изменения напора на выходе насосов. Для этого используются регулирующие вентили и исполнительные механизмы постоянной скорости. При увеличении напора поток органической фазы возвращается по байпасной системе в буферную емкость. При работе системы необходимо обеспечивать заданные пределы уровней в буферных емкостях, не допускать аварийного отключения насосов при холостом ходе и при этом обеспечивать стабильность потока органической фазы. Исследования показали, что решить такую задачу в существующей системе на установке М-1345 с применением САР с исполнительными механизмами постоянной скорости затруднительно по причине недостаточного быстродействия последних. Поэтому предлагается изменить схему управления расходом – применить частотное управление погружными центробежными насосами. Такой подход должен обеспечить решение поставленной задачи, а также позволит значительно снизить затраты по электроэнергии. Современные системы управления с использованием преобразователя частоты часто работают в режиме стабилизации внешнего параметра. Данная система строится на основе ПИ-, ПИД-регулятора, на входы которого подаются сигнал задания параметра (уставки) и сигнал с датчика регулируемого параметра. Регулятор формирует управляющий сигнал для преобразователя частоты, который за счет изменения скорости вращения двигателя поддерживает управляемую величину, равную значению уставки. В качестве внешнего параметра может использоваться расход жидкости, давление, температура и др.[1] Целью работы – разработка системы управления, обеспечивающей эффективное демпфирование потока органической фазы каскада экстракционных колонн. Математическая модель исходной системы управления уровнем жидкости в демпферной емкости приведена на рисунке 1. В данной системе в качестве объекта управления выступает демпферная емкость. Органическая фаза поступает в емкость порциями. Частота поступления органической фазы (ОФвх) и объем перекачиваемой жидкости не постоянны. Для технологического процесса необходимо равномерное поступление органической фазы в следующую колонну. Насос работает в номинальном режиме, выдавая нерегулируемый расход потока органической фазы. Управление потоком выкачиваемой жидкости (ОФвых) производится с помощью вентиля, который управляется исполнительным механизмом [2] постоянной скорости 3 (ИМ). В данной системе применяется датчик измерения и контроля уровня 1. Сигнал с этого датчика (Lвн) через фильтр Ф и значение уставки GL поступают на вход цифрового регулятора РL [2], в виде сигнала рассогласования. Управляющее воздействие пропорциональное сигналу рассогласования выдается регулятором на ИМ для дальнейшего управления вентилем. Gw GL - РL Zим 3 ОФвх ОФвых 4 Ф FIC 2 LIC 1 Q Lвн Рисунок 1 - Исходная система управления уровнем жидкости в демпферной емкости Поскольку регулирование потока жидкости происходит открытием и закрытием вентиля посредством ИМ, в то время как электродвигатель постоянно вращает вал насоса с номинальной частотой. Это происходит даже тогда, когда этого не требуется. В этом случае насос не обеспечивает приемлемого КПД. При этом электродвигатель потребляет из сети электроэнергию, соответствующую его номинальной мощности. Другими словами существует перерасход электроэнергии, что ведет к дополнительным затратам. Исходя из выше сказанного, с учетом недостатков предыдущей модели была разработана новая математическая модель регулирования потока органической фазы. Предлагаемая система управления представлена на рисунке 2. В этой системе управление расходом производится посредством насоса, управляемого частотным преобразователем. Вентиль предлагается установить в определенном фиксированном положении и изменять поток органической фазы посредством изменения частоты вращения асинхронного двигателя. В результате такая система представляет собой двухконтурную систему управления. Внутренний контур системы отвечает за регулирование выходного расхода. Внешний контур – за управление по уровню. Измерение уровня Lвн и выходного расхода Q производится при помощи датчиков измерения и контроля уровня 1 и расхода 2 соответственно. Сигнал с датчика уровня через фильтр Ф2 и значение уставки GL поступают на регулятор уровня PL в виде сигнала рассогласования между ними. Аналогично сигнал с датчика расхода через фильтр Ф1 и уставка GQ поступают на вход регулятора расхода Pω. Сигнал с регулятора расхода поступает на устройство управления насосом 4 (частотный преобразователь), который согласно значению входного сигнала изменяется частоту вращения двигателя насоса. ОФвых Gw GQ - Рw Zим ОФвх ТОУ Q Lвн Ф1 Ф2 GL - РL Tи kп Рисунок 2 - Предлагаемая система управления демпферной емкостью Моделирование систем проводилась в пакете MatLab/Simulink. На рисунках 3 и 4 представлены результаты моделирования при пуске и ступенчатом возмущении исходной и предлагаемой систем. На графиках представлена зависимость выходного расхода органической фазы от времени. Видно, что при постоянном входном расходе (кривая 1) выходной расход исходной системы (кривая 3) изменяется с большой скоростью и достигает больших значений, что неприемлемо в данной системе. А выходной расход предлагаемой системы (кривая 2) изменяется плавно, и достигает установленного значения (входной расход), не имея больших выбросов по расходу. В таблице приведены основные показатели исходной и предлагаемой системе, полученных на основании переходных процессов при пуске. Таблица – Основные параметры систем Система Исходная Предлагаемая Время демпфирования, с 20 80 Перерегулирование, % 130 3 Таким образом, разработана математическая модель демпферной емкости, включающей центробежный насос, обратный сбросовый трубопровод, регулирующий вентиль, исполнительный механизм и ее система управления, разработана каскадная система стабилизации потока органической фазы, включающая контур стабилизации расхода с частотным управлением насосом и контур коррекции уровня в демпферной емкости. Выполненные компьютерные испытание систем автоматизированной стабилизации потока органической фазы показали, что предложенная система обеспечивает: более эффективное сглаживание расхода органической фазы; исключение из контура управления ненадежного узла – исполнительного механизма постоянной скорости; возможность управления расходом органической фазы в регламентном диапазоне; более низкое энергопотребление за счет частотного управления насосом. а) 18 б) 100 90 16 3 80 14 70 12 1 L, % 3 Q, м /час 60 10 8 1 50 40 6 2 4 20 2 0 2 30 10 100 200 300 t, c 400 500 0 600 0 500 1000 1500 2000 2500 t, c Q – расход органической фазы (а), L – уровень в демпферной емкости Рисунок 3 - Временные диаграммы переходного процесса по управлению САУ демпферной емкостью а) 10 б) 90 80 1 9.5 1 70 9 60 2 L, % Q, м3/час 3 8.5 50 2 40 8 30 7.5 20 7 2980 3000 3020 3040 3060 3080 3100 3120 10 3000 3500 t, c 4000 4500 5000 5500 6000 t, c Q – расход органической фазы (а), L – уровень в демпферной емкости Рисунок 4 - Временные диаграммы переходного процесса при ступенчатом возмущении входного расхода САУ демпферной емкостью Список литературы 1 Петров Д. Применение современных преобразователей частоты // Силовая электроника. – 2005. – № 1. 2 Горюнов А. Г., Ливенцов С.Н. Цифровой регулятор для системы управления с исполнительным механизмом постоянной скорости // Известия ТПУ. – 2004. – Т. 307, № 6. – С. 131-134.