из 4 разделов. В первом ... космической отрасли, в частности, дана общая характеристика наноспутников. ВВЕДЕНИЕ
реклама

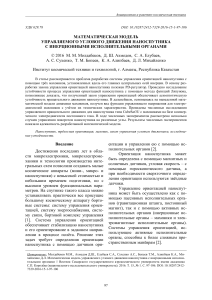
ВВЕДЕНИЕ Общая характеристика работы. Настоящая дипломная работа состоит из 4 разделов. В первом разделе представлен обзор современного состояния космической отрасли, в частности, дана общая характеристика наноспутников. Также в данном разделе определена общая аппаратная структура наноспутника стандарта "CubeSat". Второй раздел дипломной работы посвящен структурному анализу системы ориентации и стабилизации наноспутника. Основной частью данного раздела является описание разработанного математического и программного обеспечения для имитационной модели системы ориентации и стабилизации наноспутника. В третьем разделе дипломного проекта рассчитана экономическая часть. Осуществляется расчет затрат на разработку и внедрение программноматематического обеспечения комплекса имитационного моделирования системы ориентации и стабилизации наноспутника, получена экономическая эффективность внедрения разрабатываемого ПМО. В четвертом разделе дипломной работы разработан раздел охраны труда, в котором рассматриваются общие положения и общие требования безопасности к работе на ПК, в частности, эксплуатации и ремонту ПК. Рассмотрен пункт по пожарной безопасности, произведен расчет искусственного освещения, дано определение инструктажу. В заключении представлены основные результаты. В приложении приводится листинг разработанной программной системы имитационного моделирования системы ориентации и стабилизации наноспутника в современной среде разработки ПО. Цель проекта. Целью проекта является разработка комплекса имитационного моделирования системы ориентации и стабилизации наноспутника. Актуальность. Имитационное моделирование существенно упрощает этап разработки и внедрения наноспутников в эксплуатацию. Данные, полученные в результате имитационного моделирования, применяются в разработке реальных систем. Комплекс имитационного моделирования системы ориентации и стабилизации наноспутника дает возможность проводить численные эксперименты с последующей трехмерной визуализацией результатов, что позволяет детально исследовать структуру СОиС, характер движения наноспутника и влияние на него возмущающих факторов внешней среды. Задачи проекта. 1 Разработать математическую модель системы ориентации и стабилизации наноспутника. 2 На основе математической модели разработать программное обеспечение для моделирования системы ориентации и стабилизации наноспутника. 9 Научная новизна. Научная новизна разрабатываемого проекта заключается в применении и комбинировании методов имитационного моделирования и методов объектно-ориентированного проектирования. Данная методология является новым направлением в разработке дипломных проектов в технических ВУЗах РК. На примере разрабатываемого проекта возможно выявить основные концепции данной методологии. Практическая значимость. Применение программно-математического обеспечения комплекса имитационного моделирования системы ориентации и стабилизации наноспутника в качестве обучающего учебно-методического комплекса позволит студентам технических ВУЗов освоить основные принципы объектно-ориентированного проектирования и программирования, а также принципы имитационного моделирования наноспутников. На базе программно-математического обеспечения возможна разработка технического обеспечения комплекса имитационного моделирования СОиС в виде учебных стендов. Методы проведения работы: методы компьютерного моделирования, методы имитационного моделирования, методы объектно-ориентированного проектирования. 10 1 ТЕХНОЛОГИЧЕСКИЙ РАЗДЕЛ 1.1 Общие наноспутниках сведения о малых космических аппаратах – Изготовление и запуск малых космических аппаратов в последнее десятилетие стало достаточно распространенным явлением благодаря огромным достижениям микроэлектроники, информатики, массовому производству и доступности элементов космических систем, из-за сокращения централизованного финансирования всей космической индустрии и стремительной коммерциализации деятельности в космосе. Существуют различные признаки, по которым классифицируются космические аппараты – по назначению полезной нагрузки, по цели запуска, по способу вывода, по времени активного существования и так далее, но есть один признак, формально относящийся к массе и размерам аппарата, может рассматриваться как качественный. Наноспутники (англ. Microsatellite, microsat) имеют полную массу от 1 до 100 кг (иногда термин применяется и к немного более тяжелым аппаратам). Большой интерес проявляется к созданию и использованию малых космических аппаратов, в качестве адекватной замены больших космических аппаратов [1]. Это объясняется многими преимуществами наноспутников: - сравнительно низкая цена, а также небольшое время, необходимое для разработки и изготовления наноспутника; - низкая цена запуска. Ракета-носитель даже легкого класса способна вывести на орбиту несколько наноспутников. Легкие космические аппараты могут выводиться в качестве попутного груза на ракетах-носителях или в транспортных кораблях, доставляющих грузы на долговременные орбитальные станции; - снижение риска больших финансовых потерь при гибели наноспутника в случае аварии на старте или при неудачном выведении его на рабочую орбиту. Важным преимуществом космических средств является оперативность поступления информации на центральные, региональные и частные станции приема и обработки информации. Мониторинговый режим работы космических средств позволяет получать информацию о природно-экологическом состоянии окружающего региона в режиме прямой съемки и передачи информации, что очень важно при решении задач, связанных с экологической обстановкой. Таким образом космические средства получения информации становятся одним из важнейших инструментов изучения процессов, протекающих на поверхности Земли и в околоземном пространстве [1]. Задачи ДЗЗ, решаемые с помощью космических средств, были сформулированы во многих работах специалистов различных областей народного хозяйства и науки. Они могут быть классифицированы по следующим тематическим направлениям: 11 - сельское хозяйство; - климатология, контроль глобальных атмосферных изменений; - поиск полезных ископаемых и энергоносителей; - землепользование; - наблюдение прибрежных зон и океанов; - лесное хозяйство; - контроль водных ресурсов; - мониторинг чрезвычайных ситуаций. В основу разработки МС была положена следующая концепция [1]: - создаются малые КА, вывод на орбиту которых обеспечивается относительно дешевыми (конверсионными) ракетами-носителями; - основой всех типов МС является унифицированная малогабаритная космическая платформа, обеспечивающая точную трехосную ориентацию, программные повороты МС, достаточное электропитание и современное автоматическое управление полезной нагрузкой и служебными функциями; - вся бортовая служебная и информационно-измерительная аппаратура создается в негерметичном исполнении; - обеспечение надежности МС и длительной автономной работоспособности осуществляется как методами тщательной наземной отработки, так и выбором оптимальной структуры и характеристик бортовых средств управления; - осуществляется максимально возможное совмещение радиоканалов для основной и служебной информации; при этом пункты управления космическими аппаратами совмещаются с пунктами (центрами) приема и обработки основной информации; - при разработке МС, их служебных систем и полезных нагрузок в полной мере должны использоваться передовые технические и технологические решения, импортные и отечественные комплектующие элементы, позволяющие создавать миниатюрные массогабаритные бортовые устройства; - наземные технические средства, служащие для приема и обработки полезной информации от МС, должны с максимальной преемственностью использовать малые, в том числе мобильные, станции и быть оборудованы современными вычислительными средствами, позволяющими оперативно выполнять первичную, а в крупных центрах также тематическую обработку спутниковой информации. Благодаря современному уровню развития науки и техники на спутнике такого класса можно устанавливать практически все присущие большому КА бортовые системы: ориентации (пассивная и активная), электропитания, определения положения, радиосвязи, а также бортовой вычислительный комплекс [1]. Наноспутник несет полезную нагрузку, связанную с определенным классом решаемых задач широкого спектра. По своему функциональному назначению малые космические аппараты могут быть разделены на следующие группы [2]: 12 - МКА связи; - МКА дистанционного зондирования Земли; - научные и образовательные МКА; Наряду с функциональным назначением МКА важным для разработчика бортовых систем управления являются следующие позиции [2]: - срок активного существования; - требования по точности ориентации; - степень автономности от наземного комплекса управления; - необходимость специальной ориентации МКА на Землю для обеспечения устойчивой радиосвязи с наземным комплексом управления на начальном участке полета; - исполнительные органы системы ориентации и стабилизации; - инерционно-массовые характеристика МКА; - условия эксплуатации МКА: внешние возмущающие факторы, наличие угловых маневров при целевом применении, допустимость угловых маневров при проведении технологических операций (калибровка командных приборов и целевой аппаратуры), высота орбиты и др. Класс малых аппаратов непрерывно развивается, появляются новые подходы к проектированию, возможности попутного запуска, происходят миниатюризация, улучшение бортовых и наземных возможностей и т.д. Общая структура современных наноспутников представлена на рисунке 1.1. Рисунок 1.1 Структурная схема аппаратного обеспечения наноспутника 13 В данной работе, в частности, речь пойдет о наноспутниках стандарта «CubeSat» (рисунок 1.2). Основная цель создания спутников типа «CubeSat» повышение качества образования в аэрокосмической отрасли. Благодаря появлению стандарта студенты получили возможность в течение одного-двух лет участвовать в полном цикле работ над реальным космическим проектом: от выработки концепции, конструирования, изготовления и наземных испытаний до эксплуатации спутника на орбите. Кроме того, студенты приобретают практические навыки организации проекта, работы в коллективе, учатся тому, как правильно использовать время, деньги, кадры, планировать риск, организовывать совещания, готовить и использовать документацию [3]. Спутники «CubeSat» благодаря своей относительной дешевизне и быстроте в разработке являются хорошей платформой для исследования новых подходов в космической технике, позволяющей демонстрировать инновационные технические и технологические решения. Учитывая эти преимущества, в проектах «CubeSat» активное участие принимают коммерческие фирмы, такие как, Boeing и Aerospace Corporation [3]. Рисунок 1.2 Наноспутник стандарта «CubeSAT» В последнее время «CubeSat» приобретают все большее значение не только как образовательные проекты, но и как технологические и в некоторых случаях как коммерческие работы. Интересным примером технологического проекта является спутник «BeeSat», созданный Берлинским техническим университетом, который был запущен в 2010 г. Аппарат оснащен полноценной миниатюрной системой стабилизации на маховиках и полным комплектом 14 датчиков ориентации. Кроме того, подобные спутники находят применение и в военной области. У американцев также есть планы использования таких аппаратов для реализации проектов связи и даже ДЗЗ, а также для отработки технологий. Таким образом, подавляющее большинство наноспутников и аппаратов «CubeSat», запущенных в 2008-2011 гг. (а это в общей сложности 87 аппаратов различных типов), предназначено для технологических экспериментов. На части наноспутников производились также научные эксперименты. С помощью малых аппаратов осуществлялась съемка Земли, проводились эксперименты в интересах Министерства обороны США. Для аппаратов «CubeSat» технологические эксперименты также являлись основными. Лишь несколько аппаратов было запущено с научной целью. Для дистанционного зондирования «CubeSat» пока не использовались, но, замечу, предполагается экспериментальная реализация таких проектов в ближайшее время [3]. В настоящее время не существует готовой стандартной платформы «CubeSat». Значительная часть оборудования разрабатывается для конкретного спутника и ориентирована на выполнение целей его полета. Однако работы в области создания такой платформы ведутся довольно активно. Появились коммерческие компании, предлагающие готовые решения для ряда систем «CubeSat» (www.clyde_space.com, www.cubesatkit.com, www.isispace.nl). Бортовой компьютер является центральным элементом — «сердцем» спутника. Его характеристики определяются целями полета конкретного спутника, а также уровнем развития электронной элементной базы. Условия космического пространства предъявляют жесткие требования к выбору элементов бортового компьютера. Они должны быть устойчивы к действию космической радиации, работать в широком диапазоне температур, иметь достаточно низкое энергопотребление. Для спутников типа «CubeSat» используются промышленные электронные компоненты, более дешевые и менее устойчивые к действию радиации, чем «космические» компоненты, применяемые в традиционных спутниках. При этом промежуточные варианты конструкций создаются на основе еще более дешевых бытовых компонентов. Система энергоснабжения. Система энергоснабжения «CubeSat» состоит из солнечных батарей, обеспечивающих его энергией на освещенной стороне орбиты, и аккумуляторных батарей, питающих бортовые системы на теневой стороне орбиты (примерно треть времени жизни для большинства «CubeSat») и запасающих энергию солнечных батарей. Система связи и аппаратура наземной станции слежения. Бортовая система связи «CubeSat» осуществляет передачу сигналов радиомаяка, прием команд управления, передачу телеметрической информации и данных, полученных от полезной нагрузки. Система ориентации и стабилизации (СОиС). Определение ориентации осуществляется с помощью магнитных и солнечных датчиков, для управления чаще всего используются микромеханические исполнительные органы – двигатели-маховики. В состав СУОС также входят датчики 15 температуры (термисторы), поскольку характеристики солнечных датчиков существенно зависят от температуры. Для разработки, создания и использования наноспутников в Республике Казахстан требуются новые специалисты. На сегодняшний момент в стране данная отрасль находится лишь на стадии исследования. Однако на 2013-2014 годы планируется первый запуск наноспутника «CubeSat». Широкое использование наноспутников в общем технологическом процессе развития национальной космической отрасли позволит существенно уменьшить период технологического цикла разработки, создания и запуска КА. Что, в свою очередь, обеспечит занятость работников отрасли, передачу профессиональных знаний и опыта молодому поколению, и тем самым снизит уровень социальных проблем отрасли. 16 2 СПЕЦИАЛЬНЫЙ РАЗДЕЛ 2.1 Общая характеристика и назначение системы ориентации и стабилизации При решении многих задач космического полета возникает необходимость в угловой стабилизации или ориентации малого космического аппарата в требуемом направлении. Функциональные связи и аппаратурный состав систем ориентации и стабилизации тесно связаны между собой. Динамические процессы, которыми управляют эти системы, также не имеют четких границ. В литературе понятиям ориентации и стабилизации даются различные толкования. Под ориентацией понимается процесс совмещения связанной системы координат с заданной, а под угловой стабилизацией - динамика устранения возможных рассогласований между этими системами координат после их совмещения. В зависимости от способа создания управляющего воздействия системы угловой стабилизации подразделяются на пассивные, полупассивные, активные и комбинированные. Пассивные системы работают без расхода рабочего тела. К ним можно отнести гравитационную, аэродинамическую и светодинамическую системы, системы стабилизации вращением, а также системы, в которых применяются постоянные магниты. У полупассивных систем исполнительными органами являются маховики и гироскопы. Функционирование этих систем может быть обеспечено электрической энергией солнечных батарей. Работоспособность активных систем с реактивными микродвигателями возможна только в том случае, если на борту МКА имеются запасы рабочего тела, например сжатого газа [4]. 2.2 Задачи, решаемые системами ориентации и стабилизации наноспутников. Требования, предъявляемые к этим системам Задачи, решаемые СОиС, определяются прежде всего типом и назначением космического аппарата. Общее назначение СОиС для всех видов КА заключается в обеспечении устойчивого движения относительно центра масс при наличии различных возмущающих воздействий. Системы угловой стабилизации не решают самостоятельных задач. Они обеспечивают нормальное функционирование систем управления движением центра масс при различных маневрах наноспутника, а также способствуют успешной работе специального оборудования, устанавливаемого на аппаратах, с целью исследования космического пространства и земной поверхности [4]. В режиме нормального орбитального полета СОиС удерживает заданную ориентацию осей связанной системы координат относительно подвижной ориентированной и в сущности является системой ориентации. По длительности работы это основной режим. В условиях космоса, где отсутствует 17 какое-либо естественное демпфирование, возникает еще одна очень важная проблема: демпфирование колебаний. Особенно остро эта проблема стоит при создании пассивных систем угловой стабилизации. Перед включением корректирующей орбиты двигательной установки СОиС должна задать требуемую ориентацию вектора тяги этой установки и удерживать аппарат в этом положении в течение времени действия корректирующего импульса. Для решения этих задач устанавливают основную систему ориентации и систему угловой стабилизации, которая работает только в период действия корректирующего импульса [4]. Перед спуском наноспутника на Землю аппарату необходимо сообщить тормозной импульс при строгой ориентации его осей. Так, в наиболее простом и надежном варианте системы управления спуском тормозная двигательная установка может быть включена только тогда, когда одна из осей наноспутника направлена на Солнце. Во время работы корректирующей и тормозной двигательных установок возмущающие моменты могут достигать больших величин. Поэтому для этих режимов иногда целесообразно предусмотреть самостоятельные системы с частичным использованием оборудования основной системы ориентации. Система управления спуском наноспутника также нуждается в его надежной угловой стабилизации. При спуске КА на атмосферном участке траектории могут возникнуть еще большие возмущающие моменты аэродинамического характера. Эта особенность может привести к необходимости обеспечения системы управления спуском специально предназначенной для таких условий СОиС. На современных наноспутниках устанавливаются различные научные приборы. Большинство из этих приборов в состоянии выполнить поставленные перед ними задачи только при наличии на объекте СОиС, удовлетворяющей заданным требованиям по точности. К системам угловой стабилизации космических объектов предъявляются весьма жесткие требования. В основу этих требований положены следующие критерии: точность, энергоемкость, надежность, масса и габариты. Точность, предъявляемая СОиС, определяется задачами, решаемыми наноспутником. Даже для одного и того же объекта требования к точности угловой стабилизации и ориентации могут быть различными: в режиме пассивного орбитального полета точность может быть значительно ниже, чем при фотографировании отдельных участков земной поверхности метеорологическим спутником. Время активной жизни наноспутника определяется его энергетическими ресурсами. Поэтому в любом случае расход рабочего тела на управление и стабилизацию углового движения КА должен быть минимальным. Желательно также, чтобы израсходованная энергия восполнялась из окружающего пространства, например, за счет энергии Солнца. 18 Хотя СОиС и выполняет функции обслуживания других подсистем общей системы управления КА, ни одна из этих подсистем не решит поставленных перед ней задач при отказе СОиС [4]. 19