МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
реклама
")
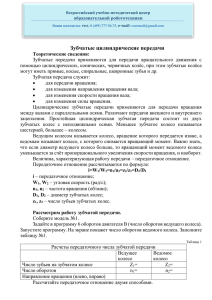
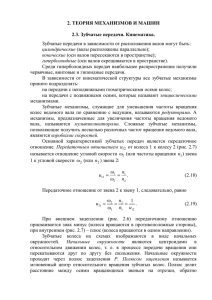
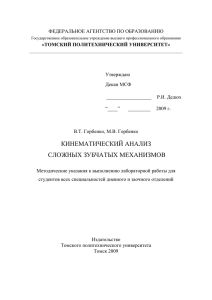
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ) ВОЛГОГРАДСКОГО ГОСУДАРСТВЕННОГО ТЕХНИЧЕСКОГО УНИВЕРСИТЕТА КАФЕДРА ОБЩЕТЕХНИЧЕСКИЕ ДИСЦИПЛИНЫ КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗУБЧАТЫХ МЕХАНИЗМОВ Методические указания к лабораторной работе по дисциплине «Теория механизмов и машин» РПК «Политехник» Волгоград 2002 УДК 62-342 К 53 Кинематический анализ зубчатых механизмов: Методические указания к лабораторной работе по дисциплине «Теория механизмов и машин» / Сост. Е. А. Малявин, А. В. Белов; Волгоград. гос. техн. ун-т. – Волгоград, 2002. – 12 с. Излагаются теоретические основы кинематического анализа зубчатых механизмов. Рассматриваются примеры кинематического анализа различных зубчатых механизмов. Предназначены в помощь студентам, обучающимся по направлениям 551200 и 552900. Илл. 4. Табл. 2. Библиогр.: 1 назв. Рецензент Н. Г. Неумоина Печатается по решению редакционно-издательского совета Волгоградского государственного технического университета Волгоградский государственный технический университет, 2002 2 Цель работы – приобрести практические навыки по составлению кинематических схем и определению передаточных отношений зубчатых механизмов. 1. ТЕОРЕТИЧЕСКИЕ ОСНОВЫ КИНЕМАТИЧЕСКОГО АНАЛИЗА Зубчатые механизмы предназначены для передачи вращательного движения от одного вала к другому. Существует большое разнообразие зубчатых механизмов с цилиндрическими и коническими зубчатыми колесами, с внешним и внутренним зацеплениями, с прямозубыми и косозубыми зубчатыми колесами, с круглыми и некруглыми колесами, с неподвижными и подвижными осями зубчатых колес и т. д. Для проведения анализа зубчатых механизмов необходимо уметь составить кинематическую схему механизма, определить число степеней свободы, передаточное отношение механизма в целом и отдельных его ступеней. При выполнении кинематических схем пользуются условными графическими обозначениями согласно ГОСТ 2.707-68, которые приведены в табл. 1. Полное представление о зубчатом механизме дают две его кинематические схемы. Одна из них представляет собой как бы вид сверху, причем оси всех валов мысленно располагают в одной плоскости. Такая схема наглядно раскрывает особенности кинематических связей звеньев (рис. 1, а). Вторая схема того же механизма (рис. 1, б) представляет собой как бы вид сбоку. Эта схема позволяет представить конфигурацию механизма, взаимное расположение звеньев и все необходимые размеры. На кинематической схеме механизма указывают стойку, подвижные звенья, виды кинематических пар и их взаимное расположение, а также размеры и другие параметры звеньев, необходимые для кинематического анализа. Передаточным отношением i зубчатого механизма называется отношение угловой скорости 1 входного (ведущего) вала к угловой скорости n выходного (ведомого) вала: i 1 n , (1) где: n – порядковый номер (в направлении передачи движения) выходного вала. 3 Так, для одноступенчатой зубчатой передачи (рис. 2) передаточное отношение от вала 1 к валу 2 будет равно: i12 1 2 . УСЛОВНЫЕ ГРАФИЧЕСКИЕ ОБОЗНАЧЕНИЯ ЗУБЧАТЫХ ПЕРЕДАЧ Таблица 1 Наименование Обозначение 1. Передачи зубчатые (цилиндрические): а) внешнее зацепление (общее обозначение без уточнения типа зубьев); б) то же, с прямыми, косыми и шевронными зубьями; в) внутреннее зацепление. 4 Продолжение табл. 1 Наименование Обозначение 2. Передачи зубчатые с пересекающимися валами (конические): а) общее обозначение без уточнения типа зубьев; б) с прямыми, спиральными и круговыми зубьями. а б Рис. 1. 5 Передаточное отношение зубчатого механизма может быть выражено через геометрические характеристики зубчатых колес: i12 1 Z d 2 2 2 Z1 d1 , (2) где: Z1 и Z2 – числа зубьев колес; d1 и d2 – диаметры начальных окружностей зубчатых колес. Знак передаточного отношения зависит от направления угловых скоростей. Так как при внешнем зацеплении (рис. 2, а) угловые скорости колес имеют различное направление вращения, то у внешнего зацепления передаточное отношение всегда отрицательно. Наоборот, у внутреннего зацепления (рис. 2, б) передаточное отношение всегда положительное. Формула 2 охватывает оба случая, надо лишь помнить, что каждую из угловых скоростей 1 и 2 в нее следует подставить со своим знаком. Для многоступенчатой зубчатой передачи (см. рис.1) общее передаточное отношение равно произведению передаточных отношений составляющих ее отдельных ступеней: (3) i1n i12 i 23 ... i (n 1)n . Можно выразить передаточное отношение через соответствующие угловые скорости: i1n 1 n . (4) Передаточное отношение, выраженное через числа зубьев: i1n (1) К Z2 Z3 ... Zn , Z1 Z2 ... Z( n 1) где: К – число внешних зацеплений. а б Рис. 2. 6 (5) Множитель (-1)К позволяет определить знак передаточного отношения сложного зубчатого механизма. К сложным зубчатым механизмам относятся также зубчатые коробки передач. Зубчатой коробкой передач называется зубчатый механизм, передаточное отношение которого можно изменять скачкообразно по ступеням регулирования. Коробками передач снабжаются те машины, рабочие органы которых должны вращаться с различными скоростями в зависимости от условий работы. Коробка передач состоит из зубчатых колес, которые могут быть введены в зацепления в различных комбинациях для получения передаточных отношений, соответствующих заданным скоростям вращения рабочего органа машины. Способы переключения отдельных колес для получения различных передаточных отношений разнообразны и зависят от конструктивного оформления коробки перемены передач. Передаточное отношение на каждой ступени регулирования (передаче) можно определить по формуле 5. На рис. 3 показана схема четырехступенчатой коробки перемены передач с двумя валами. Колеса на валу 1 посажены жестко, на валу 2 колеса сидят свободно. При помощи специальных устройств, например шпонки, не показанной на чертеже, можно жестко соединить одно из нижних колес с валом 2, в соответствии с чем между валами 1 и 2 получается то или иное передаточное отношение, благодаря этому один из валов 1 или 2 будет иметь четыре различные скорости при одной и той же скорости другого вала. Рис. 3. Возможны и такие зубчатые механизмы, в которых геометрические оси некоторых колес меняют свое положение в пространстве. Такие механизмы называются эпициклическими. Наибольшее распространение среди них нашли дифференциальные (рис. 4, а) (с двумя степенями свободы) и планетарные (рис. 4, б) (с одной степенью свободы) зубчатые механизмы. На рис. 4,а изображена одна из простейших схем дифференциального механизма. В этом механизме три зубчатых колеса с числом зубьев Z1, Z2, Z3. Геометрические оси колес 1 и 3 совпадают с общей осью механизма О-О, и поэтому эти колеса называются центральными или солнечными. Колесо 2 вращается в подшипнике на звене 4, называемом 7 водилом, и вместе с ним движется вокруг общей оси механизма О-О, оставаясь в постоянном зацеплении с колесами Z1 и Z3. Колесо Z2 называется сателлитом. Данный механизм обладает двумя степенями свободы, поэтому для получения полной определенности движения всех его звеньев необходимо задать две обобщенные координаты; например, задать числа оборотов каких-либо двух звеньев. Так как числа оборотов двух звеньев могут быть заданы произвольно, то и отношение чисел оборотов может быть любым и, значит, дифференциальный механизм не обладает никаким определенным передаточным отношением. Если закрепить на стойке звено 1 или 3, то будем иметь планетарный механизм с одной степенью свободы (см. рис. 4, б). Эпициклические механизмы обладают широкими кинематическими возможностями. Так, при неподвижном звене 3 (см. рис. 4, б) движение может передаваться от звена 4 к звену 1 или от звена 1 к звену 4; при неподвижном звене 1 – от звена 3 к звену 4 или от звена 4 к звену 3. При всех свободных звеньях (дифференциальный механизм) одно движение можно раскладывать на два или два соединить в одно, например, от звена 1 к звеньям 3 и 4, от звеньев 1 и 4 к звену 3 и т. д. Это достоинство является одним из основных и позволяет использовать передачу как редуктор с постоянным передаточным отношением; как коробку перемены передач, передаточное отношение в которой изменяется путем поочередного торможения звеньев; как дифференциальный механизм. а б Рис. 4. При исследовании кинематики эпициклических механизмов широко используется метод остановки водила. В этом случае всем звеньям механизма мысленно сообщается вращение с частотой вращения водила, но в обратном направлении. Получаем, так называемый, обращенный механизм. При таком обращении водило 4 остановится и дифференци8 альный механизм примет вид двухступенчатой передачи. В этом случае можно обычным путем определить передаточное отношение от звена 1 к звену 3 по формуле 5. ( 4) i13 (1)1 Z 2 Z3 Z 3 Z1 Z 2 Z1 . (6) Верхний индекс в скобках показывает, какое звено в данном случае неподвижно. Частоты вращения (угловые скорости) остальных звеньев дифференциального механизма приведены в таблице 2. ЧАСТОТЫ ВРАЩЕНИЯ ЗВЕНЬЕВ ДИФФЕРЕНЦИАЛЬНОГО МЕХАНИЗМА Звено 1 Таблица 2 В обращенном механизме В дифференциальном механизме n1 (1) 1(4) = 1 – 4; n1(4) = n 1 – n 4 2 n2 (2) 2(4) = 2 – 4; n 2(4) = n 2 – n 4 3 n3 (3) 3(4) = 3 – 4; 4 n4 (4) 4(4) = 4 – 4 = 0; n 4(4) = n 4 – n 4 = 0 n 3(4) = n 3 – n 4 Тогда передаточное отношение: ( 4) i13 1 4 n1 n 4 3 4 n 3 n 4 . (7) С учетом формулы 6 можно записать: ( 4) i13 Z n1 n 4 3. n3 n 4 Z1 (8) Эта формула позволяет по заданным оборотам двух звеньев определить частоту вращения третьего звена. Пример. Определить передаточное отношение планетарного механизма, у которого ведущее звено – 1, ведомое звено – 4, неподвижное звено – 3 (см. рис. 4, б): (3) i пл i14 9 1 4 . (9) Для обращенного механизма: ( 4) i13 1 4 3 4 . (10) Разделим числитель и знаменатель на 4: ( 4) i13 1 4 4 4 i пл 1 , 3 4 0 1 4 4 (11) откуда: ( 4) i пл 1 i13 . (12) Передаточное отношение обращенного механизма (формула 8): ( 4) i13 Z3 Z4 , тогда: (3) i пл i14 1 Z3 . Z4 2. ПОРЯДОК ПРОВЕДЕНИЯ РАБОТЫ 1. Составьте кинематическую схему механизма. 2. Пронумеруйте все валы (1, 2, … n) и зубчатые колеса (Z1, Z2 и т. д.), начиная от ведущего колеса. 3. Подсчитайте число зубьев всех колес. 4. Сделайте структурный анализ механизма и определите число степеней свободы. 5. Разделите зубчатый механизм на ступени, установите расчетные формулы для определения передаточных отношений отдельных ступеней и вычислите их. Вычислите общее передаточное отношение механизма. 6. Опытным путем определите общее передаточное отношение механизма. Для этого сосчитайте число оборотов ведущего колеса, соответствующее одному обороту ведомого колеса. 7. По результатам опытных данных и расчетов оформите отчет. 10 3. СОДЕРЖАНИЕ ОТЧЕТА 1. Кинематическая схема зубчатого механизма. 2. Структурный анализ механизма. 3. Передаточное отношение механизма. 4. Общее передаточное отношение зубчатого механизма, определенное экспериментально. 5. Выводы по работе. 4. КОНТРОЛЬНЫЕ ВОПРОСЫ 1. Виды механизмов для передачи вращательного движения. 2. Какие механизмы называются плоскими? 3. Передаточное отношение одно- и многоступенчатой зубчатой передачи. 4. Выражение передаточного отношения зубчатой передачи через геометрические характеристики зубчатых колес. 5. Достоинства и недостатки зубчатых передач с косозубыми колесами. 6. Достоинства и недостатки зубчатых механизмов. СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ 1. Артоболевский И. И. Теория механизмов и машин: Учебник для втузов. – 4-е изд. доп. и перераб. – М.: Наука, 1988. – 640 с. 11 Составители: Евгений Александрович Малявин Александр Владимирович Белов КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗУБЧАТЫХ МЕХАНИЗМОВ Методические указания к лабораторной работе по дисциплине «Теория механизмов и машин» Редакторы: Попова Л. В., Просондеев М. И. Темплан 2002 г., поз. № 135 Подписано в печать 03. 07. 2002 г. Формат 1/16. Бумага потребительская. Усл. печ. л. 0,56. Уч.-изд. л. 0,75. Тираж 100 экз. Заказ . Волгоградский государственный технический университет. 400131 Волгоград, просп. им. В. И. Ленина, 28. РПК «Политехник» Волгоградского государственного технического университета. 400131 Волгоград, ул. Советская, 35. ООО «Камипринт» 403850 г. Камышин, Волгоградской обл., ул. Ленина, 20. 12