УДК 621.867.2 Дмитриева Валерия Валерьевна к.т.н., доц.
реклама

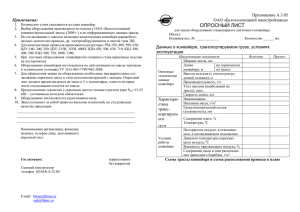
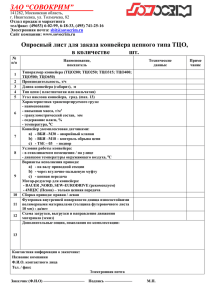
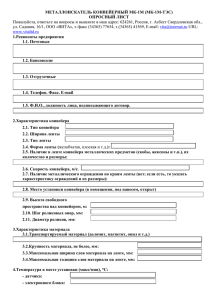
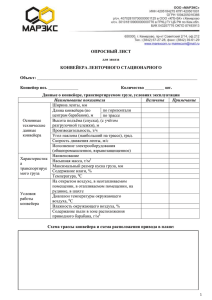
УДК 621.867.2 Дмитриева Валерия Валерьевна к.т.н., доц. кафедра «Автоматика и управление в технических системах» Московский государственный горный университет МОДЕЛИРОВАНИЕ ПУСКО-ТОРМОЗНЫХ РЕЖИМОВ ЛЕНТОЧНОГО КОНВЕЙЕРА MODELING START-BRAKE MODE BELT CONVEYORS В более ранних работах автора [2] была разработана модель ленточного конвейера. Эта модель представляет собой комплекс из трех математических моделей: Модель движения ленты конвейера; в этой модели метод кусочнолинейной аппроксимации позволил заменить систему с распределенными параметрами, каковой является лента, на модель с сосредоточенными параметрами десятого порядка; Модель асинхронного привода с частотно-векторной системой управления; Модель вычисления и стабилизации величины тягового фактора конвейера E . Расчетная схема конвейера представлена на рис. 1. L x3 , x3 m3 x1 , x1 x2 , x2 m2 m1 M ПР m4 x4 , x4 Gну , 0,5 L Рис. 1. Расчетная схема конвейера Здесь лента представлена четырьмя сосредоточенными массами m1 , m2 , m3 , m4 , соединенными между собой упруго-вязкими связями. Одна масса Gну представляет собой натяжное устройство, расположенное в хвостовой части конвейера. Именно натяжное устройство, перемещаясь и выбирая слабину, возникающую из-за растяжения ленты, обеспечивает натяжения в ветвях ленты, необходимые для поддержания требуемой величины тягового фактора. В качестве обобщенных переменных приняты перемещения x1 , x2 , x3 , x4 , четырех масс, их скорости x1 , x 2 , x3 , x 4 , а так же 50 ход и скорость перемещения натяжного груза , . В работах [2, 4] была получена модель в виде системы дифференциальных уравнений : (2mг 2mп mпр ) x1 mг x2 mп x4 2Cx1 Cx 2 Cx 4 0,5Gп lw 0,5Gг lwsgn x1 2 x1 x2 x4 M пр Rб sgn xс x1 , mг x1 4mг x2 mг x3 Cx1 2Cx2 Cx3 Gг lw sgn x2 x1 2 x2 x3 0 , (1) mг x2 2mг 2mп x3 mп x4 Cx2 (2C 0,25Ск ) x3 (C 0,25Ск ) x4 0,5Ск x2 2 x3 x4 (0,5Gг lw 0,5Gп lw) sgn x3 0 , mп x1 mп x3 4mп x4 Cx1 (2C 0,25Ск ) x3 (C 0,25Ск ) x4 0,5Ск x1 x3 2x4 Gпl w sgn x4 0 , Gну 0,5Cк x3 0,5Cк x4 Cк Gну Gну f sgn 0 , g где М пр – момент двигателя, приведенный к валу приводного барабана, RБ – радиус приводного барабана, l - длина ленты, Gну - вес груза натяжного устройства, mг - масса участка грузовой ветви, mп - масса участка порожней ветви, m пр - масса привода, w -коэффициент сопротивления движению, f - коэффициент сопротивления движению натяжных грузов, вязкость ленты с грузом, C - жесткость ленты, Cк - жесткость канатов натяжного устройства, Gг , Gп – погонный вес движущихся частей соответственно груженной и порожней ветви. В матричной записи модель имеет вид: MX NX CX S sgn X G P sgn( X c X 1 ) M пр , где матрица M 55 - матрица масс, N 55 - матрица коэффициентов вязкого трения, C55 - матрица коэффициентов жесткого трения, S 55 - матрица коэффициентов сил сопротивления движению. Матрицы P51 и G51 связаны с внешними воздействиями на ленту со стороны движущего привода и натяжного устройства. В этой модели, используя каноническое правило О. Коши, выберем в качестве координат состояния перемещения и скорости сосредоточенных масс X ( x1 , x2 ,..., x10 )T ,: 51 x1 x1 , x1 x6 , x2 x2 , x2 x7 , x3 x3 , x3 x8 , x4 x4 , x4 x9 , x , x . 5 5 Модель движения ленты конвейера в пространстве состояний представлена в виде системы нелинейных дифференциальных уравнений: ~ ~ ~ ~ (2) X AX B1 sgn xc x6 M пр B2 sgn X B3Gну , Здесь первое управляющее воздействие обозначим U1 M пр - это движущий момент, создаваемый приводом, второе управляющее воздействие U 2 sgn X - силы сопротивления движению сосредоточенных масс ленты, третье управляющее воздействие U 3 Gну - вес натяжного устройства В этих обозначениях система уравнений, описывающая модель движения ленты конвейера под действием трех управляющих воздействий записывается в виде: ~ ~ ~ ~ (3) X AX B1 sgn xc x6 U1 B2U 2 B3U 3 , ~ Матрица состояния системы A представляет собой блочную матрицу, включающую в себя матрицы M 1N и M 1C , матрицы управления так же ~ ~ ~ блочные: матрица B1 включает в себя M 1P , B2 включает в себя M 1S , B3 включает в себя M 1G : ~ B3 101 0 ~ A1010 515 M C55 0 151 . M G51 , M N 55 E5 1 0 ~ B1 101 51 1 , M P51 0 ~ B2 1010 55 0 5 5 0 5 5 , M 1S55 Компьютерное моделирование производилось в системе SIMULINK, входящей в пакет прикладных программ MATLAB. Этот программный продукт позволяет выполнять моделирование динамических систем, описываемых обыкновенными нелинейными дифференциальными уравнениями. Используя типовые блоки SIMULINK, была собрана структурная схема системы, включающей в себя контур ленты конвейера и натяжное устройство. Лента конвейера представлена своей внутренней моделью: x Ax Bu , y Cx Du. Для реализации управления три внешних воздействия объединены в один вектор U , размерность которого 12 1 . Матрица управления B B1 B2 B3 , размерность матрицы B 10 12 . Матрица D - нулевая. В качестве выходных сигналов рассмотрим скорости движения 52 сосредоточенных масс. Тогда матрица C diag 0 0 0 0 0 1 1 1 1 1. Схема моделирования в ППП Matlab приведена на рис. 2. S1 x' = Ax+Bu y = Cx+Du Selector LENTA Selector4 Selector7 S2 w Selector Selector8 Selector6 Ema S3 Scope11 Mux1 Selector9 Selector S4 Selector3 Mux Selector10 G FAKTOR 1 w1 W -KW SKOROST Sum1 SOPROTYVLENIYA Selector Demux SGN V M nagry zki SILY Soprotivleniya MOMENT AKZ s YPR1 Gain6 Saturation3 -KGain1 S Product1 Sum Рис. 2. Схема моделирования движения ленты конвейера В разработанной модели реализовать режим торможения можно только отключив движущий привод. Для этого в модели нужно выполнить следующие действия: отключить момент нагрузки, поступающий на привод со стороны ленты; обнулить сигнал задания по скорости, подаваемый в систему управления приводом. Таким образом, моделируется свободный выбег ленты. Результаты этого опыта следующие. Изменения скоростей сосредоточенных масс при разгоне и торможении представлены на рис. 3. Рис. 3. Разгон и торможение ленты 53 Отключение движущего привода происходит на 60 секунде. Из рисунка видно, что аппроксимирующие массы движутся плавно и совместно. Полная остановка конвейера происходит за 10 секунд. Рассмотрим теперь торможение конвейера с использованием тормозных колодок, причем в трех вариантах: использование тормоза на головном барабане, использование тормоза на хвостовом барабане, совместное включение обоих тормозов. Для того чтобы моделировать эти режимы, следует преобразовать модель, так как в исходной модели не предусмотрены тормоза. Применение тормоза - это приложение тормозящего момента. Если тормозные колодки располагаются на головном барабане, то изменяется первое уравнение системы (1), в него добавляется еще одно управляющее воздействие: (2mг 2mп mпр ) x1 mг x2 mп x4 2Cx1 Cx2 Cx4 0,5Gп lw 0,5Gг lw sgn x1 2 x1 x 2 x 4 M пр Rб sgn xс x1 M ТОР sgn( 0 x1 ) , Rб где M ТОР - тормозной момент. В матричной модели вводим матрицу P1 2 0 0 0 0 T , ~ следовательно, блочная матрица B1 изменит размерность и примет ~ вид: B1 10 2 052 1 1 . M P51 M P151 Если тормозные колодки располагаются на хвостовом барабане, то изменяется третье уравнение системы (2), в него добавляется так же еще одно управляющее воздействие: mг x2 2mг 2mп x3 mп x4 Cx2 (2C 0,25Ск ) x3 (C 0,25Ск ) x4 0,5Ск x 2 2 x3 x 4 (0,5Gг lw 0,5Gп lw) sgn x3 M ТОР sgn( 0 x3 ) , Rб В матричной модели вводим матрицу P2 0 0 2 0 0 T , ~ следовательно, блочная матрица B1 изменится аналогичным образом. Если же тормоза располагаются на обоих барабанах конвейера, то в 2 0 0 0 0 T ~ , а матрица B1 будет 0 0 2 0 0 модель нужно ввести матрицу P3 иметь размерность 10 3 . Эти изменения размерности следует учитывать при моделировании в ППП Matlab: в блоке State-Space изменяется размерность матрицы управления B B1 B2 B3 1014 . Применение тормозов можно моделировать, используя блок Look-Up-Table, формируя в нем постоянную величину, при условии, что скорость сосредоточенной массы отличается от 0. Величины тормозных моментов можно изменять. В качестве примера рассмотрим следующий режим торможения: отключение привода и торможение на головном барабане. Результаты приведены на рис. 4. 54 Рис. 4. Изменение скоростей сосредоточенных масс при торможении конвейера на 60 секунде Величина тормозного момента постоянна и составляет 50% от величины движущего момента. Из результатов моделирования видно, что торможение занимает меньше времени, головная точка останавливается практически сразу, но остальные сосредоточенные массы продолжают движение по инерции. Величина тягового фактора не превышает заданного значения. Время полного останова ленты составляет порядка 5 секунд. При торможении тормозом, расположенным на хвостовом барабане, наблюдается другая картина. Результаты моделирования представлены на рис. 5. Рис. 5. Изменение скоростей сосредоточенных масс при торможении конвейера на 60 секунде В этом случае движение сосредоточенных масс имеет колебательный характер. Следовательно, при таком режиме остановки конвейера следует 55 применять управляемое натяжное устройство, которое обеспечивает поддержание тяговой способности привода, иначе лента будет проскальзывать на приводном барабане из-за уменьшения натяжения в сбегающей ветви. Разработанная в [2] модель конвейерной установки легко позволяет это сделать. Кроме того, модель дает возможность управлять тормозными режимами, для чего нужно усложнить моделирующие блоки, реализуя в них технологические рекомендации [1]. Например, применять сначала свободный выбег, а после некоторого снижения скорости движения накладывать механические тормоза. Литература. 1. Шахмейстер Л.Г., Дмитриев В.Г. Расчет ленточных конвейеров для шахт и карьеров. – М.: «Машиностроение», 1987. 2. Дмитриева В.В., Разработка и исследование системы автоматической стабилизации погонной нагрузки магистрального конвейера. Диссертация на соискание ученой степени к.т.н. – М., 2005. 3. Дмитриева В.В., Гершун С.В. Автоматическая стабилизация величины тягового фактора магистрального ленточного конвейера с двухдвигательным приводом. // ГИАБ, 2010. – №3. – С. 246-255. 4. Дмитриева В.В. Синтез регулятора натяжения ленты для стабилизации тяговой способности привода ленточного конвейера. // ГИАБ, 2004. – №11. Аннотация. Разработан и описан алгоритм, управляющий тормозными устройствами на приводном и хвостовом барабанах конвейера, который обеспечивает останов конвейера без проскальзывания ленты на приводном барабане. Developed an algorithm for control braking systems of the belt conveyor, that provides a conveyor stopping without the belt sliding by preliminary tensions change in the conveyor branches. Ключевые слова. автоматизация, моделирование, Simulink, ленточный конвейер, алгоритм управления, торможение, тяговый фактор, проскальзывание ленты automation, modeling, Simulink, belt conveyor, control algorithm, braking, traction factor, belt sliding 56