УПРАВЛЕНИЕ НАЧАЛЬНЫМ СОСТОЯНИЕМ
реклама

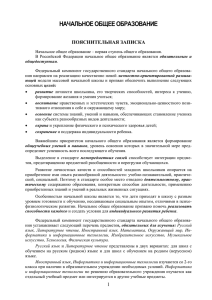
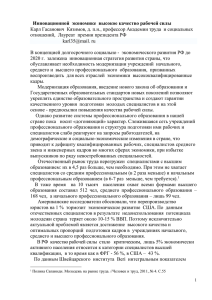
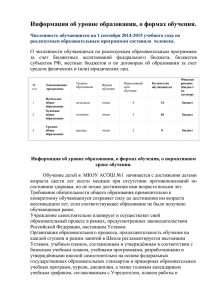
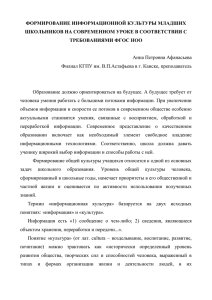
УПРАВЛЕНИЕ НАЧАЛЬНЫМ СОСТОЯНИЕМ ДИНАМИЧЕСКИХ СИСТЕМ С ПОМОЩЬЮ СИГНАЛЬНОГО ВХОДА Гавар Мамедов, Газанфар Рустамов, Вахид Фархадов Азербайджанский Технический Университет, Баку, Азербайджан, gazanfar.rustamov@gmail.com Динамика управляемых систем, в том числе, их свободное движение, исследуется при ненулевых начальных условиях. Если не имеется доступ к внутренней структуре объекта, с целью установления необходимых начальных условий или «сброса», то это можно выполнить с помощью сигнального входа. Основой данного подхода является равноценность начального состояния динамической системы входной (t) – функции Дирака. Не нарушая общности, рассмотрим линейный стационарный объект, задаваемый моделью состояния: dx dt Ax Bu, x(0) x0 0 (1) где, x x1 , x 2 ,..., x n T - вектор состояния; u u1 , u 2 ,...,u m T - вектор управления (сигнальный вход); А, В – постоянные nxn и nxm матрицы. x0 0 . Пусть m=n. Требуется установить начальное условие системы (1) на x(0) ~ Тогда можно записать u u1 B 1~ x0 (t ) , (2) где (t) – скалярный единичный импульс. При этом уравнение объекта: dx dt Ax B u1 B 1~ x0 (t ) , x0 0 . (3) Учитывая свойство L[(t)]=1, при нулевых начальных условиях изображение вектора состояния имеет вид: X ( s ) sI A1 Bu1 ( s ) ~ x0 . Соответствующий оригинал: t t (4) x(t ) e At ~ x0 Bu1 ()d e At ~ x0 e A(t ) Bu1 ()d . 0 0 Здесь e At L1 sI A1 - переходная матрица. Выражение (4) является известным решением линейной системы (1) при начальном условии ~x 0 . При m<n, на все начальные состояния xi0 , i 1, n повлиять не возможно. В этом случае задача не имеет полного решения. Так, при скалярном входе m=1 возможно изменить начальное условие лишь одной переменной xj(t), j=1,2,…,n. На рис.1 показана схема моделирования уравнения (3). ОБЪЕКТ U U1(t) ~ x0 + B B-1 (t) + I 1s A Рис.1. X(t) Реализацию единичного импульса можно осуществить согласно выражению: (t ) h1(t ) 1(t ), h 1 , 10 ( 25) . Здесь 1(t), 1(t-) – смещенные на величину ступенчатые функции (Step). Случай m=1 часто встречается при приведении модели «вход-выход» y ( n) f y, y ' ,..., y ( n1) , u к модели состояния. В линейном случае: dx dt Ax bu, y x1. Здесь 0 0 A ... a n ... 0 ... 0 , b . ... ... ... ... a n1 ... a1 b 1 0 0 1 При этом можно повлиять лишь на начальное условие переменной x n (t ) y ( n1) (t ) . Выражение (2) принимает вид: u u1 b 1 ~ x n0 (t ). Пример 1. Скалярный случай m = 1. Уравнение объекта задано в форме «входвыход»: y 0,6 y 2 y 3u . Вводя новые переменные х1 = y, x2 y можно записать: 1 x1 0 x1 0 u . x 2 2 0,4 x2 3 x n0 (t ). Пусть сигнал управления u1=1(t), а требуемое Выражение (2): u u1 1 3~ начальное условие х20 = 2. На рис.2 показана схема моделирования на пакете SIMULINK. OBYEKT 3 b* 2 b u u1=1(t) 1 xo s Gain2 0 Integrator 1/3 Gain1 Xo x2=y' DELTA -0.4 1000 1(t) -2 1(t-1) а) 1 s x1=y y' Integrator1 Scope y y y y t t б) в) Рис.2. Как видно из рис.2,б траектория х2 (t ) y (t ) начинается из требуемого начального состояния y' (0) 2 . На рис. 2,в значение х2(0)=2 реализовано путем изменения начального условия первого интегратора при (t) = 0. Как видно в обоих случаях получены одинаковые переходные процессы х1(t) = y(t) и x 2 (t ) y (t ) . На рис.3 показана схема моделирования в случае когда объект задан передаточной функцией. В этом случае начальные условия нулевые y(0) y (0) 0 и изменить их путем вмешательства во внутреннюю структуру объекта невозможно. OBYEKT u1=1(t) 1 Gain2 Transfer Fcn 3 b* 2 b u 1/3 y y' s2 +0.4s+2 du/dt Scope Derivative1 Xo DELTA 1000 1(t) 1(t-1) а) y y t б) Рис.3. Как видно из рис.3,б – процесс по y (t ) начинается с требуемого начального состояния y (0) 2 . Пример 2. Теперь рассмотрим векторный случай m = n = 2. Уравнение объекта задано в форме модели состояния: x1 x 2 2u1 , x 2 2 x1 0,4 x 2 u 2 . Здесь 1 0 2 0 0,5 0 A , B , B 1 2 0,4 0 1 0 1 x 5,2 T . Пусть u1 = 1 + 0,2sin(4t), u1 = 1(t). Требуемое начальное состояние ~ 0 На рис.4,а представлена схема векторной реализации модели объекта. t u1 0.2*sin(4*(u)) Clock Xo B u OBYEKT u2=1(t) Fcn [2 0;0 1]* uvec B* 1 xo s Add1 x1, x2 [0 0] [5 2] [0.5 0;0 1]* uvec Matrix Multiply DELTA Scope [0 1;-2 -0.4]* uvec Product1 1000 1(t) 1(t-0.001) а) х1 х2 t б) Рис.4. Как видно из рис.4,б процессы х1(t) и х2(t) начинаются из требуемого начального состояния х1(0)=5 и х2(0)=2. Аналогичные результаты получены при (t)=0 и начальном условии интегратора х0=[5 2]. Рассмотренный способ может быть использован для предварительного возбуждения внутреннего состояния элементов и устройств вычислительной техники и систем управления. А так же, осуществить «сброс» текущего состояния. Решение модельных задач на MATLAB/SIMULINK показали высокую достоверность теоретических положений и позволили сделать ряд положительных выводов, имеющих важное прикладное значение.