Нелинейные динамические системы
реклама

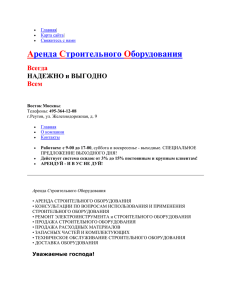
ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ Нелинейные динамические системы Вып. 43 Межвузовский сборник научных трудов 2011 УДК 531.391, 623.52 А.В. Черников г. Пермь МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЗАСТРЕЛИВАНИЯ В ГРУНТ СТРОИТЕЛЬНОГО ЭЛЕМЕНТА С ПЛАВАЮЩЕЙ ПЛАТФОРМЫ, НАХОДЯЩЕЙСЯ НА ПОВЕРХНОСТИ НЕСПОКОЙНОЙ ВОДЫ Предлагается математическая модель застреливания из откатной артиллерийской системы в грунт строительного элемента с платформы, находящейся на поверхности неспокойной воды. Представлен численный расчет конкретной системы "пушка – строительный элемент – понтон – вода – грунт". Сделаны выводы о возможности применения откатных орудий для заглубления свай в донный грунт с неспокойной водной поверхности. Введение В работах [1–3] предложены математические модели, описывающие динамику артиллерийских орудий, находящихся на твердой поверхности при застреливании строительных элементов в грунт. В этих же работах описано практическое использование пушек при возведении легких фундаментов. При погружении в грунт строительных элементов из артиллерийских орудий, находящихся на платформе, расположенной на неспокойной поверхности воды, возникает вопрос о рассмотрении динамики орудия, строительного элемента и его движения в воде и в грунте. При этом возникает необходимость в построении математической модели процесса. © Черников А. В., 2011 132 А В. Черников. Математическая модель застреливания в грунт… Модель выстрела Моделирование важно в связи с конструированием водных строительных артиллерийских орудий. Пусть p – давление пороховых газов при движении в канале ствола, – относительная часть сгоревшего пороха, L, v – путь строительного элемента по каналу ствола и его скорость относительно канала ствола, V , Ln – скорость и перемещение артиллерийского орудия с платформой, t – время. В явлении выстрела будем рассматривать три периода выстрела: предварительный период – от начала горения пороха до начала движения строительного элемента; первый период – от начала движения строительного элемента до конца горения пороха; второй период – движение строительного элемента во время адиабатического расширения уже образовавшихся пороховых газов после сгорания пороха[4]. При выводе основных уравнений внутренней баллистики пушки, находящейся на плавающей платформе на неспокойной поверхности воды, сделаем следующие допущения: 1) ствол строительного артиллерийского орудия направлен вертикально вниз к центру земли; 2) артиллерийское орудие находится на краю платформы; 3) откатные части строительного артиллерийского орудия жестко прикреплены к платформе; 4) ствол без нарезов, то есть рассматриваются гладкоствольные орудия; 5) для строительного артиллерийского орудия с платформой не учитывается работа, затрачиваемая на перемещение газов и заряда (это можно сделать, приняв во внимание то, что вес заряда в рассматриваемых случаях чрезмерно мал по сравнению с весами строительного артиллерийского орудия с платформой и строительного элемента, а, следовательно, кинетическая энергия заряда будет ничтожно мала по сравнению с кинетической энергией строительного артиллерийского орудия с платформой и строительного элемента); 133 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 6) давление газов на дно канала ствола и строительный элемент одинаковы; 7) рассматривается порох с постоянной поверхностью горения; 8) закон скорости горения пороха u выражается формулой u u1 p , где u1 const , p – давление пороховых газов в канале ствола; 9) состав продуктов горения не меняется, и величина силы пороха f и коволюма пороховых газов постоянны; 10) показатель адиабаты 1 принимается постоянным, равным некоторому среднему значению; 11) предполагается, что строительный элемент стоит на месте, пока давление газов не достигает величины давления форсирования p0 ; 12) движение строительного элемента по каналу ствола рассматривается до момента прохождения его днища через дульный срез; 13) растяжение стенок ствола при выстреле и прорыв газов через зазоры между строительным элементом и каналом ствола отсутствуют; 14) силы сопротивления грунта и воды описываются гладкой функцией от времени, модуль производной которой ограничен не очень большим числом; 15) застреливаемый строительный элемент – недеформируемое тело; 16) застреливание строительного элемента происходит на малой воде при глубине 3–5 м; 17) сопротивление воды пренебрегается; 18) масса и момент инерции противовеса равны массе и моменту инерции артиллерийского орудия. При анализе процесса выстрела строительного артиллерийского орудия с платформы, находящейся на неспокойной поверхности воды, необходимо учитывать не только часть энергии пороховых газов, которая превращается в кинетическую энергию поступательного движения строительного элемента, но и энергию, затрачиваемую на совершение другого вида работ. Это позволит установить баланс энергии при выстреле. 134 А В. Черников. Математическая модель застреливания в грунт… Запишем закон сохранения энергии для первого периода выстрела. Энергия пороховых газов, расходуемая на выполнение работ, равна E f p(W sL) , (1) – сила пороха, – коэффициент адиабаты без единицы, – масса заряда, – относительная часть сгоревшего заряда, p – давление в канале ствола, W – свободный объем каморы к моменту сгорания в ней части заряда , s – площадь поперечного сечения канала ствола, L – путь строительного элемента по каналу ствола. Определим работу по преодолению силы сопротивления воды и грунта движению в них строительного элемента, выполненную за счет энергии пороховых газов. Пусть сила сопротивления грунта F11 удовлетворяет соотношению F11 F1 (va , La ). Сила сопротивления воды F21 удовлетворяет соотношеF нию 21 F2 (va , Lb ). Тогда энергию, необходимую для импульсного вдавливания строительного элемента на глубину воды Lb и глубину грунта La , можно записать в виде где f La Lb 0 La Z1 F1 F2 F1 (va , x)dx F2 (va , x)dx , где dx va . dt Абсолютная скорость движения строительного элемента va (скорость относительно поверхности земли) связана с относительной скоростью v (скоростью относительно канала ствола) и скоростью движения артиллерийского орудия с платформой V (относительно поверхности воды) равенством va v V . Таким образом, величина Z1 примет вид La Lb 0 La Z1 F1 (v V , x)dx F2 (v V , x)dx , где dx v V . dt 135 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 Очевидно, что кинетическая энергия, которую будет иметь строительный элемент массой m в момент времени t , 2 удовлетворяет соотношению Z 2 mva . 2 Ствол артиллерийского орудия расположен вертикально и таким образом, что строительный элемент движется вниз. То есть, очевидно, что энергия пороховых газов идет на перемещение артиллерийского орудия с платформой вверх. Таким образом, совершается работа, которую можно выразить соотношением Z 3 QLn , где Q – суммарный вес артиллерийского орудия и платформы, Ln – перемещение артиллерийского орудия с платформой. Кроме того, энергия пороховых газов сообщает строительному артиллерийскому орудию и платформе скорость V . Следовательно, кинетическая энергия строительного артиллерийского орудия и платформы удовлетворяет равенству Z4 MV 2 , где M – суммарная масса артиллерийского ору2 дия и платформы. Энергия, расходуемая на преодоление силы сопротивлеLn ния отката в общем случае, имеет вид Z 5 G V , Ln dLn , где 0 Ln – перемещение строительного артиллерийского орудия с платформой, G (V , Ln ) – сила сопротивления отката. Так как строительный элемент движется вертикально вниз, то сила тяжести сама выполняет работу Z 6 qLa , которая не входит в сумму работ, совершаемых за счет энергии пороховых газов. Тогда энергия пороховых газов E имеет вид 5 E Zi Z 6 . i 1 136 А В. Черников. Математическая модель застреливания в грунт… Подставляем полученные ранее значения для энергии и работ Z и получаем следующее соотношение E b f p(W sL) a mv 2 F1 (v V , x)dx F2 (v V , x)dx a QLn 2 0 La L L L MV 2 n G (V , Ln )dLn qLa . 2 0 (2) Из уравнения (2) находим выражение для давления в канале ствола р. Получаем соотношение L f p L a b mva2 F1 (v V , x)dx F2 (v V , x)dx qLa 2 0 La s( L L) (3) L n MV 2 QLn G (V , Ln )dLn 2 0 , s( L L) где L W . s Рассмотрим уравнения предварительного, первого и второго периода выстрела. Вычисление параметров предварительного периода сводится к определению относительной части сгоревшего пороха 0 до начала движения строительного элемента. Величина 0 удовлетворяет соотношению 0 1 1 , где – плот- f 1 p0 ность заряжания, – плотность пороха, f – сила пороха, p0 – давление форсирования строительного элемента, – коволюм пороховых газов. 137 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 Для того чтобы строительный элемент начал двигаться поступательно, необходима энергия пороховых газов, которая позволяет строительному элементу освободится от креплений. Сила, необходимая для этого, определяет величину p0 s , зная которую можно найти значение давления форсирования p0 . Для получения дифференциального уравнения, описывающего изменение давления в первом периоде выстрела, необходимо дифференцировать уравнение (3) по времени t . Получим L L d dva d a d b f mva F1 (v V , x)dx F2 (v V , x)dx qva dt dt dt 0 dt La dp (4) dt s ( L L) L n dL dL MV dV QV d G (V , L )dL n n p( ) dt dt 0 dt dt . L L s( L L) Учтем справедливость цепочки равенств La L t d d b d 1 F ( v V , x ) dx F ( v V , x ) dx F1 (v V , La )(v V )dt 1 2 dt 0 dt La dt 0 t d 2 F2 (v V , Lb )(v V )dt F1 (va , La )va F2 (va , Lb )va . dt t1 По определению скорости верно соотношение dL v. Для dt трубчатого пороха справедливы уравнения d Гp. dt In dL W 1 0 ( ) Гp, dt s где – характеристика формы пороха, Г удовлетворяет соотношению Г . In 138 In (5) (6) – импульс пороха, А В. Черников. Математическая модель застреливания в грунт… Обозначим через a1 выражение a1 W0 ( 1 ). s Таким образом, соотношения для трубчатого пороха (5) и (6) примут вид d Гp. , dL a1 Гp. dt dt Подставляем полученные выражения в (4), получим dp dt f Гp mva dva F1 (v V , La )(v V ) F2 (v V , Lb )(v V ) dt s( L L) dV q(v V ) p(v a1 Гp) MV dt QV G (V , Ln )V . s( L L) L L s( L L) Выведем уравнения, отвечающие за поступательное движение строительного элемента в грунте, воде и канале ствола одновременно. На строительный элемент, двигающийся вертикально вниз, действуют следующие силы: сила, образующаяся за счет давления пороховых газов, которая задается уравнением X 1 ps. Сила сопротивления воды и грунта X 2 ( F1 (va , La ) F2 (va , Lb )). Сила тяжести, определяемая весом строительного элемента q, X 3 q. В результате запишем второй закон Ньютона для системы и получим m 3 dva Xi. dt i 1 Заменим в данном уравнении величины ями и получим m Xi их выражени- dva ps F1 (va , La ) F2 (va , Lb ) q. dt 139 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 Преобразуем полученное равенство, учитывая, что va v V , m dv ps F1 (v V , La ) F2 (v V , Lb ) q m dV . dt dt Очевидно, что скорость движения отката артиллерийского орудия с платформой V удовлетворяет соотношению M dV ps Q G (V , Ln ). dt С учетом данного соотношения уравнение поступательного движения строительного элемента относительно канала ствола примет вид dv m m ps F1 (v V , La ) F2 (v V , Lb ) q ( ps Q G (V , Ln )). (8) dt M Приведем подобные члены уравнения (8) m dv m m (1 ) ps F1 (v V , La ) F2 (v V , Lb ) G (V , Ln ). dt M M Перемещение вверх артиллерийского орудия с платформой находится из уравнения Ln dLn V. dt Объединяя все полученные ранее уравнения, получим систему обыкновенных дифференциальных уравнений dv f Гp mva a F1 (v V , La )(v V ) F2 (v V , Lb )(v V ) q(v V ) dp dt dt s( L L) p(v a1 Гp) L L m MV dV QV G (V , Ln )V dt , s( L L) dv m m (1 ) ps F1 (v V , La ) F2 (v V , Lb ) G (V , Ln ), dt M M M dV ps Q G (V , Ln ), dt dL v, dt 140 dLn V, dt d Гp, dt (9) А В. Черников. Математическая модель застреливания в грунт… L W0 1 (1 ( ) ). s (10) Начальные условия для системы имеют вид p/ t 0 p0 , v/ t 0 0, / t 0 0 , L/ t 0 0, Ln / t 0 0,V/ t 0 0. Решая систему (9), можно получить зависимости p(t ) , v(t ) , V (t ) , L(t ) , Ln (t ) , (t ) , определяющие внутреннюю баллистику импульсного вдавливания строительного элемента в воду, грунт из артиллерийского орудия на платформе в первом периоде выстрела ( 1). Во втором периоде выстрела пороховые газы расширяются адиабатически согласно закону: p pk где pk , Lk ( L1 Lk )1 , ( L1 L)1 – значения давления в канале ствола и пути строи- тельного элемента к концу первого периода выстрела. L1 удо- влетворяет равенству L / 1 L1. Полная система дифференциальных уравнений для второго периода выстрела будет иметь вид ( L Lk )1 p pk 1 , ( L1 L)1 m dv m m (1 ) ps F1 (v V , La ) F2 (v V , Lb ) G (V , Ln ), dt M M (11) dV M ps Q G (V , Ln ), dt dL v, dt dLn V. dt Начальные условия для системы соответствуют конечным значениям для первого периода выстрела. В результате, решая систему уравнений для второго периода выстрела (11) с соответствующими начальными условиями, можно получить зависимость p (t ) , v(t ) , V (t ) , L (t ) , Ln (t ) [5]. Движение платформы 141 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 Рассмотрим поведение платформы во время выстрела. Модель установки для погружения в грунт строительного элемента с платформы на неспокойной поверхности воды взята из работ [6 ,7]. Так как платформа соединена с откатными частями пушки, то силы тормозов отката нет, тормоза отката намертво присоединены к платформе, и откатные части ни сами по себе, ни с платформой не тормозятся откатными частями пушки, и G (V , Ln ) 0 . Силы, действующие на строительное артиллерийское орудие с платформой представлены на рисунке. X 2 4 FA 3 1 Fv Q Y Состояние платформы в момент после выстрела строительного артиллерийского орудия, где Q – вес артиллерийского орудия с платформой и противовесом, FA – сила Архимеда, F , F – сила сопротивления движению по соответствующим vx vy осям координат, F0 – сила отдачи артиллерийского орудия, 1 – поверхность воды, 2 – строительное артиллерийское орудие, 3 – платформа, 4 – противовес Рассмотрим систему "качающаяся платформа с артиллерийским орудием на спокойной воде". Запишем второй закон Ньютона для системы с движением по вертикали: M d 2x FA Fv Mg . dt 2 Сила Архимеда FA имеет вид 142 А В. Черников. Математическая модель застреливания в грунт… FA gV gab(h0 x) , где V – объем погруженной в воду платформы со строительным артиллерийским орудием, – плотность воды, a , b, h0 – линейные размеры части платформы. Сила сопротивления движению Fv имеет вид Fv k dx , dt где k – коэффициент вязкости, зависящий от рода жидкости и равный k St , где St ab – площадь погруженной в воду части платформы. Тогда второй закона Ньютона для движения по вертикали на спокойной воде примет вид x ab gab x x 0. M M Уравнение колебания системы по вертикали на поверхности неспокойной воды будет иметь вид x ab gab x x ASin(t ). M M (12) Математическая модель вдавливания строительного элемента с платформы, находящейся на неспокойной поверхности воды В явлении погружения строительного элемента в грунт через воду будем рассматривать шесть этапов: 1) – настройка системы – принятие горизонтального положения качающейся платформой; 2) – предварительный период выстрела; 3) – первый период выстрела и движение артиллерийского орудия с платформой вверх; 4) – второй период выстрела и движение артиллерийского орудия с платформой вверх; 5) – движение строительного элемента в грунте; 6) – колебание артиллерийского орудия с платформой. Для первого этапа погружения строительного элемента будет иметь место система уравнений 143 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 x ab gab x x ASin(t ) 0 , M M 10 gd (mпс mут ) 4mпс d 2 5m ут ( R12 R22 d 2 ) 10 x [8]. 4mпс d 2 5m ут ( R12 R22 d 2 ) Для второго этапа погружения строительного элемента 0 1 1 . f 1 p0 Для третьего этапа погружения строительного элемента dv dV f Гp mva a q (v V ) MV QV dp p ( v a Гp ) dt dt 1 , dt s ( L L) L L s ( L L) m dv m (1 ) ps F1 (v V , L Ln ), dt M dV (13) ps Q abV , dt dL dLn v, V , d Гp, L W0 (1 ( 1 ) ) . dt dt dt s M p/ t 0 Начальные условия для системы (13) следующие: p0 , v/ t 0 0 , / t0 0 , L/ t 0 0 , Ln / t 0 0 , V/ t 0 0 . 1 Для четвертого этапа p pk ( L1 Lk ) , 1 ( L1 L) dv m (1 ) ps F1 (v V , L Ln ), dt M dL dV v, dLn V . M ps Q abV , dt dt dt m (14) Начальные условия для системы уравнений (14) будут следующими: полученные значения переменных p (t ) , v(t ) , V (t ) , L(t ) , Ln (t ) 144 решения системы (13) для третьего этапа. А В. Черников. Математическая модель застреливания в грунт… Для пятого этапа будет иметь решение система m dv F1 (v V , L Ln ), dt M dV Q abV , dt (15) dLn dL V, v. dt dt Начальные условия для системы уравнений (15) будут следующими: полученные значения переменных v(t ) , L (t ) , решения системы (14) для четвертого этапа. После выхода строительного элемента из ствола артиллерийского орудия наступает шестой этап, платформа продолжает колебательное движение, описываемое задачей Коши V (t ) , Ln (t ) x ab ab g x x ASin(t ) . M M Начальные условия для уравнения будут следующими: x(t ) Ln , x(t ) V , где t – момент времени конца четвертого этапа. Численный эксперимент В качестве примера для расчетов приняты следующие характеристики: модернизированная пушка М-46 (М-47) и понтон, соответствующий платформе. Использовались следующие параметры: длина канала ствола L5 2.345 м, масса строительного элемента m 360 кг, длина строительного элемента L0 4 м, калибр ствола d 0.170 м, объем каморы 3 W0 0.001026 м , масса заряда 0.3 кг, сила пороха f 950000 дж/кг, характеристика формы пороха 1, плотность пороха 1600 кг/м3, давление форсирования строительного элемента p0 200000 кг/м2, коволюм пороховых га- зов 0.98 103 м3/кг, плотность заряжания 145 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 W0 0.3 102 293.4 кг/м3, полный импульс давления 0.1026 газов во время сгорания пороха I n 367000 Па с, коэффициент адиабаты без единицы 0.2 , вес откатных частей орудия Q1 36000 н, диаметр головной части строительного элемента D 0.168 м, вес платформы Q p 250000 н, размеры платформы a 15 м, b 3 м, h 1м, длина строительного элемента принимается больше длины канала ствола, расстояние от головной части строительного элемента до поверхности грунта L2 1 м. Показатель консистенции для глины принимается равным I l 0.3 . Коэффициенты сопротивления глинистого грунта a1 3422 Нс2/м2, b1 2000000 Н/м2, c1 35000 Н/м2. Парамет- ры волн: амплитуда A 0.5 м, циклическая частота колебаний 2 рад/сек. Параметры промежуточной полусферы и утяжелителя устройства определения горизонтального положения платформы: mnc m ym 0.05 кг, R1 0.05 м, R2 0.01 м, d 0.4 м. Для решения поставленной задачи используем метод Рунге– Кутта 2-го порядка. Для расчетов воспользуемся пакетом MathCad. Тогда для первого этапа погружения строительного элемента получим, что при первом же колебании устройство отслеживания горизонтального положения платформы верно определяет, когда платформа находится горизонтально. Этапы со второго по пятый аналогичны этапам с первого по четвертый, описанный во второй главе. Запишем одни результаты данных этапов, без решений и уравнений. Для второго этапа погружения строительного элемента получим следующее значение 0 5.86 104 . 8 Для третьего этапа: p 1.693 10 Па , / t 8.93103 v/ t 8.93103 22.773 м / с , / t 8.93103 0.999 , L/ t 8.9310 0.035 м , 5 Ln / t 8.93103 5.675 10 м , V/ t 8.93103 0.204 м / с . 3 146 А В. Черников. Математическая модель застреливания в грунт… Для четвертого этапа: p/ t 0.026 1.415 106 Па , v/ t 0.026 43.787 м / с , L/ t 0.026 2.345 м , Ln / t 0.026 0.019 м , V/ t 0.026 0.257 м / с . Для пятого этапа: L/ t 0.103 4.373 м . То есть заглубление строительного элемента в грунт равно L 3 / 373 м. Для шестого этапа: Ln / t 0.307 0.063 м . Заключение Полученные результаты расчетов динамики системы "пушка – строительный элемент – плавающая платформа – вода – грунт" показывают возможность застреливания на достаточную глубину в дно водоема (до 4 м) строительных элементов из откатных артиллерийских орудий, расположенных на понтонахплатформах, находящихся на водной поверхности. Способ застреливания строительных элементов с понтонов предлагается использовать при возведении легких причалов, пристаней и небольшого водного строительства. Библиографический список 1. Пенский О.Г. Артиллерийский строительный конструктор // Вестн. машиностроения. 2005. №7. С.31–33. 2. Пенский О.Г. Основные задачи конструирования артиллерийских орудий, предназначенных для погружения строительных элементов в грунт // Вестн. машиностроения. 2005. №2. С.34–37. 3. Пенский О.Г. Расчет динамических характеристик сосуда с соплом, предназначенного для заглубления строительных элементов в грунт // Вестн. машиностроения. 2005. №4. С.81–83. 4. Серебряков М.Е. Внутренняя баллистика ствольных систем и пороховых ракет. М.: Оборонгиз, 1962. 703 с. 5. Маланин В.В, Пенский О.Г. Сопряженные модели динамики импульсно-тепловых машин и проникания недефор147 ПРОБЛЕМЫ МЕХАНИКИ И УПРАВЛЕНИЯ – 2011 мируемых тел в сплошную среду: моногр. / Перм. гос. ун-т. Пермь, 2007. 199 с. 6. Установка для погружения в грунт строительных элементов: Пат. РФ на изобретение RU 2 348 757 C1, Кл. E02D 7/00 / В.В.Маланин, О.Г.Пенский, А.А.Проничев, А.Ю.Ракко. – опубл. 10.03.2009, Бюл. №7. 7. Установка для погружения строительных элементов: А.с. 1258105 СССР, МКИ2 E02D 7/12 / М.Ю.Цирульников, Р.Х. Хабибуллин, С.Б.Шафран, В.Н.Григорьев, О.Г.Пенский, В.А. Гвиндяев. – опубл. 15.05.1986, Бюл. №9. 8. Черников А.В. Математическая модель устройства отслеживания горизонтального положения качающейся платформы // Пробл. механики и управления. Нелинейные динамические системы. Перм. гос. ун-т. Пермь, 2010. Вып.42. С.144–151. 148