Сербин4
реклама

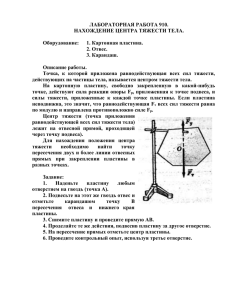
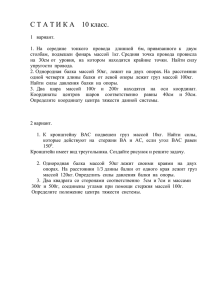
Глава 4. 4.1. Плоская система произвольно расположенных сил Плоская система произвольно расположенных сил Как уже говорилось в параграфе 1.3.2, если все силы системы, или линии их действия, не сходятся в одной точке, такая система называется системой произвольно расположенных сил. Когда все силы такой системы лежат в одной плоскости она называется плоской системой произвольно расположенных сил (рис. 4.1). F1 F2 F3 F6 2 F4 F5 Рис. 4.1. Плоская система произвольно расположенных сил Возможны самые разные комбинации сил. Силы есть результат механического взаимодействия тел, и, следовательно, они прикладываются к телам, но для теоретических рассуждений можно рассматривать их взаимодействие на плоскости без привязки к конкретным телам. 4.1.1. Приведение силы к произвольно выбранной точке Ранее было рассмотрено, что силу можно переносить в произвольную точку лежащую на ее линии действия. Для решения ряда практических задач иногда требуется осуществлять перенос силы в произвольно выбранную точку, которая не лежит на линии действия силы. Подобный перенос силы в произвольную точку сопровождается дополнительными требованиями, связанными с необходимостью сохранения равновесия системы, и называется приведением силы к точке. Сила F приложена к точке А (рис. 4.2,а), необходимо осуществить ее приведение (перенос) к произвольно выбранной точке В. Для этого в точке В прикладываем две уравновешенные силы F1, F1', равные по модулям силе F, расположенные на одной линии действия, которая принята параллельной линии действия силы F. Так как силы F1, F1' уравновешены (их сумма равна нулю), общее состояние системы сил не изменится. Сила F равна по модулю силе F1' и направлена в 49 туже сторону, соответственно, мы осуществили ее перенос в точку В. Оставшиеся силы F и F1 равны по модулям, параллельны, направлены в противоположные стороны, и они составляют пару сил с плечом d. Плечом является перпендикуляр из точки В на линию действия силы Полученная F. пара сил называется присоединенной. Момент присоединенной пары сил равен М = Fd = F1·d (рис. 4.2,б). Иными словами, при приведении силы F к произвольной точке, не лежащей на ее линии действия, получается эквивалентная система, присоединенной пары сил имеющей момент М = Fd состоящая из силы и (рис. 4.2,в). Присоединенный момент компенсирует момент, возникающий оттого, что сила стала прикладываться к другой точке, и тем самым создавать момент относительно начальной точки приложения. Сила F может лежать слева и справа от точки приведения и создавать момент, действующий по часовой стрелке или против часовой стрелки. а) б) в) А А F1 ' d F F В F = F1 ' В В М = Fd F1 Рис. 4.2. Приведение силы F к произвольно выбранной точке: а – исходная система (сила F приложена в точке А); б – приведение силы к точке В; в – система сил полученная в результате приведения исходной системы сил к точке В эквивалентная исходной системе Пример. 4.1. На защемленную в фундаменте колонну действует сила F = 50 кН, линия действия силы не совпадает с центром колонны (рис. 4.3), расстояние d = 30 см. Требуется выполнить приведение силы относительно центра колонны (точки В). а) В F б) Fʹʹ F А В А d Fʹ d в) F'' = 50 кН В М= 1500 кН·см Рис. 4.3. К примеру 4.1. Перенос силы F в точку В, расположенную по центру колонны: а – действие силы на колонну; б – прикладываем в точку В две уравновешенные силы, равные по модулю силе F; в – эквивалентная исходной система сил (действует сила F = F'' и присоединенный момент М) 50 Решение. Прикладываем в точку В две силы равные по модулю силе F = 50 кН, но направленные в противоположные друг другу стороны F' = F''. Получаем, что в точке В действуют сила F'' = F = 50 кН и пара сил (F – F' ) создающая момент М = Fd = 50·30 = 1500 кН·см. Направление действия момента соответствует вращению, создаваемому исходной силой F относительно точки В. Приведение системы сил к точке 4.1.2. К выбранной точке на плоскости можно осуществить приведение не только одной силы, но и системы, состоящей из произвольного числа сил. Так, например, в различных точках к телу приложена плоская система сил (рис. 4.4,а), требуется привести эти силы к точке О которая называется центром приведения сил. а) б) F2 А F3 В О F4 (М4) F4 F2 (М2) F5 (М5) С F1 F5 О D F3 (М3) F1 (М1) г) в) F5 Fгл О F1 Fгл F4 Мгл F2 О F3 Рис. 4.4. Приведение системы сил к произвольной точке: а) – произвольная система сил; б) – силы приведенные к точке О и присоединенные к силам моменты; в) –сложение системы сил приведенных к точке О; г) – главный вектор и главный момент полученные в результате приведения системы сил к точке Перемещаем силу F1 в точку О, так как линия действия силы не проходит через точку, то в точке О кроме силы возникает присоединенная пара сил с моментом М1, который направлен против часовой стрелки (сила F1 в исходной системе вызывает вращение относительно точки О против часовой стрелки), аналогично переносим все силы с присоединенными моментами (рис. 4.4,б). Теперь силы можно сложить, так как 51 они все сходятся в одной точке, и алгебраически произвести сложение присоединенных моментов. В результате сложения приведенных к точке О сил получаем силу которая называется главный вектор Fгл, а в результате суммирования присоединенных моментов получаем главный момент Мгл (рис. 4.4,г). В случае, если линия действия какой либо силы начальной системы сил проходит через точку О, то ее присоединенный момент равен нулю, иначе говоря такую силу можно просто переместить в точку. Возможны четыре варианта, возникающие при приведении систем сил к произвольной точке: 1. Fгл ≠ 0, Мгл ≠ 0; общий случай, тело вращается и одновременно с этим ускоренно движется. 2. Fгл = 0, Мгл ≠ 0; тело вращается вокруг неподвижной оси. 3. Fгл ≠ 0, Мгл = 0; тело движется прямолинейно ускоренно. 4. Fгл = 0, Мгл = 0; тело находится в равновесии. Пример 4.2. Имеем две расположенные параллельно силы (рис. 4.5) F1 = F2 =12 кН, плечи этих сил d1 = 10 см, d2 = 6 см, требуется выполнить их приведение относительно точки О. Решение. 1. Определяем значение главного вектора Fгл = F1 + (– F2) = 12 – 12 = 0. а) б) F1 М1 = F1d1 d1 d2 F2 М2= F2d2 F1 О F2 О в) Мгл = 48 кН·см О Рис. 4.5. К примеру 4.2. Вариант приведения сил (Fгл = 0; Мгл ≠ 0): а – исходная система сил; б – система сил приведенных к точке О; в – результат приведения сил к точке О 2. Определяем значение главного момента Мгл = М1 + (– М2) = F1d1 – F2d2 = 12·10 – 12·6 = 48 кН·см, знак главного момента положительный, так как направление вращения большего по величине момента М1 происходит по часовой стрелке и в результате 52 алгебраического сложения получаем главный момент Мгл, который также вызывает вращение по часовой стрелке. Результат приведения сил к точке О показан на рис. 4.5,в. Теорема Вариньона 4.1.3. Теорема о моменте, который создает равнодействующая исходной системы сил относительно точки приведения этой системы (теорема Вариньона), применяется для решения ряда задач технической механики. Момент равнодействующей системы сил относительно произвольного центра приведения, равен сумме моментов всех сил системы относительного того же центра. Следует отметить, что одну силу (равнодействующую) можно получить складывая силы входящие в системы сходящихся сил, либо системы параллельных сил, и в этих системах главный момент должен быть равным нулю. б) а) R F2 А F3 F2 А F1 F3 D F1 R Рис. 4.6. Система сил: а) – исходная система сил с точкой схождения А и точкой приведения D; б) – суммирование сил системы Для доказательства теоремы Вариньона возьмем систему сходящихся в точке А сил (рис. 4.6,а) и обозначим центр приведения сил (произвольно взятую точку D). Суммируем силы и определяем направление равнодействующей R (рис. 4.6,б). а) б) R F2 А R F3 Fгл Fгл А F1'' F2' F1 F2 ' F3 ' F3 ' D F2'' F1 ' F3'' М3 D Мгл М2 М1 F1 ' Рис. 4.7. Приведение сил к центру приведения, точке D: а) – перенос в точку приведения уравновешенных сил; б) – замена пар сил моментами 53 1. Осуществляем приведение всех сил исходной системы к точке D. Для этого прикладываем в точке D взаимно уравновешенные силы, параллельные и равные по модулям силам исходной системы: F1' = F1'' = F1; F2' = F2''= F2; F3' = F3''= F3 (рис. 4.7,а). 2. Складываем силы исходной системы (определяем модуль равнодействующей): n F i 1 i F1 F2 F3 R . 3. Силы: F1 – F1''; F2 – F2''; F3 – F3'' составляют пары сил. Действие пар сил характеризуются их моментами, соответственно заменяем пары сил моментами М1, М2, М3 (рис. 4.7,б). 4. Суммируем моменты n M i 1 i M 1 M 2 M 3 M гл . Сумма моментов всех сил относительно центра приведения равна главному моменту (рис. 4.8). R А F гл d Рис. 4.8. Система сил, полученная после приведения исходной системы к точке D М гл D 5. Оставшиеся силы, после замены пар сил моментами, суммируем, и получаем главный вектор: n F i 1 i F1 F2 F3 Fгл . Главный вектор параллелен равнодействующей (так как составляющие его силы параллельны силам исходной системы); главный вектор равен по модулю равнодействующей (так как силы F1 = F1'; F2 = F2'; F3 = F3'); главный вектор направлен в ту же сторону, что и равнодействующая. 6. Проведем перпендикуляр d из точки D к линии действия равнодействующей (и соответственно, линии действия главного вектора). 7. Произведение равнодействующей на плечо d соответствует моменту равнодействующей относительно точки D (точки приведения) М(R) = R d, отсюда d = М(R)/R. 8. Прикладываем в точку D две уравновешенные силы равные равнодействующей и равные главному вектору R = Fгл, что не нарушает равновесие исходной системы сил. А R F гл= R d D Fгл Рис. 4.9. Главная пара сил (R – Fгл) 54 Представим главный момент в виде главной пары сил R – Fгл (рис. 4.9). Значение главного момента М(гл) = Fгл·d. Отсюда находим плечо главной пары сил, как отношение главного момента к главному вектору d = М(гл)/Fгл, соответственно получаем, М(R)/R = М(гл)/Fгл, учитывая, что R = Fгл, устанавливаем, что момент равнодействующей равен главному моменту, который в свою очередь является суммой моментов всех сил относительно центра приведения: М(R) = М(гл) = n M i 1 i , теорема доказана. Как следствие теоремы можно отметить, что всегда есть точка, относительно которой главный момент равен нулю. В рассмотренной выше системе это точка А и любая другая, лежащая на линии действия равнодействующей. Главный момент плоской системы сил относительно любой точки, лежащей на линии действия ее равнодействующей равен нулю. Задания для самостоятельной работы 4.1 1. Перенесите силу F = 41 кН из точки А в точку В, расстояние d = 3 см, и определите значение и направление присоединенного момента (рис. 4.10). А F d В Рис. 4.10. К заданию 1 2. Определите положение линии действия равнодействующей, если известно значение и направление главного вектора Fгл = 20 кН и главного момента Мгл = 80 кН·см, полученные после приведения равнодействующей к точке D (рис. 4.11). М гл F гл D 4.2. Рис. 4.11. Система сил, полученная после приведения к точке D. К заданию 2 Плоская система параллельных сил Система любого количества сил F1, F2, ..., Fn, лежащих в одной плоскости, линии действия которых параллельны друг другу, называется плоской системой параллельных сил. Силы системы могут иметь различные или одинаковые направления. Система 55 параллельных сил имеет равнодействующую равную алгебраической сумме всех сил, n которая прикладывается к центру параллельных сил, R Fi F1 F2 .... Fn . i 1 4.2.1. Центр двух параллельных сил С помощью теоремы Вариньона можно найти точку, к которой приложена равнодействующая системы двух параллельных сил (рис. 4.12). 1. Определяем моменты сил относительно точки С (центра параллельных сил), учитывая их знаки: момент от силы F1 равен: – М(F1) = F1·a', момент от силы F2 равен + М(F2) = F2·b', где a', b' , соответственно, плечи сил F1, F2. a' R F1 b' α С А F2 В b a l Рис. 4.12. Положение центра двух параллельных сил 2. Находим величину равнодействующей R = F1 + F2. (Так как силы направлены в одну сторону, они просто складываются, если какие-то силы будут направлены в разные стороны, они будут вычитаться). 3. Суммируем моменты сил относительно точки С, учитывая, что их сумма относительно центра сил, в соответствии с теоремой Вариньона равна нулю: М(С ) = – М(F1) + М(F2) = 0; отсюда следует, М(F1) = М(F2), или F1·a = F2·b, что соответствует отношению F1/F2 = b'/a' = b/a. Зная отношение сил можно определить отношение расстояний и найти точку приложения равнодействующей. Точка С называется центром параллельных сил. Из рассмотрения приведенных выше доказательств, следует, что положение центра системы параллельных сил и величина равнодействующей не зависит от направления этих сил, главное сохранить их параллельность и модули. Если синхронно повернуть силы системы относительно точек их приложения на одинаковый угол, то равнодействующая повернется на этот же угол, ее численное значение не изменится, и она будет делить отрезок АВ на части пропорционально отношению сил (рис. 4.13). 56 β F1 А R β F2 β В С a b Рис.4.13. Поворот системы параллельных сил на одинаковый угол l Пример. 4.3. На элемент длиной l = 3,8 м, под углом α = 34º действуют две параллельные силы F1 = 45 кН, F2 = 28 кН (рис. 4.12). Требуется определить величину и точку приложения равнодействующей. Решение. Отношение F1/ F2 = 45/28 = 1,607; b'/a' = b/a =1,607. Зная, что a + b = l = 3,8 м, принимаем значение a за 1 часть длины, тогда b равна 1,607 частей и в сумме они составляют 2,607 частей от общей длины равной 3,8 м. Одна часть длины равна a = 3,8/2,607 = 1,4576 м, b = 3,8 – 1,4576 = 2,3424 м. Полученные значения отрезков можно проверить через моменты сил относительно точки С – они должны быть равны. Плечи сил: a' = а соs α = 1,4576·0,829 = 1,208 м; b' = 2,3424·0,829 = 1,9418 м. Моменты сил относительно центра параллельных сил – М(F1) = F1·a' = 45·1,208 = 54,36 кН·м; + М(F2) = F2·b' = 28·1,9418 = 54,37 кН·м; различие в сотых долях значений моментов является результатом округления. Равенство значений моментов относительно точки С показывает, что точка приложения равнодействующей определена правильно, алгебраическая сумма моментов равна нулю. 4.2.2. Координаты центра системы параллельных сил Система параллельных сил, состоящая из произвольного числа сил, также имеет равнодействующую, которая приложена к центру параллельных сил. Для нахождения координат центра параллельных сил XС, YС, рассмотрим систему параллельных сил, привязанную к координатным осям (рис. 4.14), т.е координаты точек А, В, Е, D представляющие начала сил известны. 57 R y В F2 YС С D F3 F1 А Fn Е х 0 XС Рис. 4.14. Система параллельных сил Зная правило, что при повороте всех сил на одинаковый угол их центр не меняется, повернем все силы параллельно оси y (рис. 4.15,а). Определяем суммарный момент от всех сил относительно начала координат, точки 0, (расстояния «ординаты» y1, y2, y3, … yn, соответствуют плечам сил для нахождения моментов сил относительно точки 0) М(F) = (–F1 y1) + F2 y2 + (–F3 y3) + …+ (–F4 yn). а) y2 В F2 yn YС y1 y3 б) R y С y F2 В Fn F1 А D F3 А F1 Е E х 0 R С D 0 x1 x2 x3 F3 xn Fn х XС Рис. 4.15. Поворот системы сил для нахождения моментов относительно осей Соответственно если повернуть все силы параллельно оси x, расстояния «абсциссы» x1, x2, x3, … xn, соответствуют плечам сил (рис. 4.15,б) и момент определится как: М(F) = F1 x1 + (– F2) x2 + F3 x3 + … Fn xn. Величина равнодействующей R = F1 + (– F2) + F3 + … Fn. Момент равнодействующей относительно точки 0: М(R ) = RXС (рис. 4.15, а); и М(R ) = RYС (рис. 4.15,б). В соответствии с теоремой Вариньона, момент всех сил относительно точки 0 равен моменту от равнодействующей этих же сил относительно той же точки: М(F) = F1 x1 + (– F2) x2 + F3 x3 + … Fn xn = М(R ) = RXС , или М(F) = (– F1 y1) + F2 y2 + (– F3 y3) + … (– Fn yn) = М(R ) = RYС, отсюда можно найти координаты точки С, место приложения равнодействующей: XC F1 x1 F2 x2 F 3x3 ... Fn xn ; F1 F2 F3 ... Fn (4.1) 58 YC F1 y1 F2 y2 F3 y3 ... Fn yn . F1 F2 F3 ... Fn (4.2) Для объемной системы параллельных сил, появится третья координата центра параллельных сил (знаки сил и моментов надо будет определять исходя из конкретного примера) ZC F1 z1 F2 z 2 F 3z 3 ... Fn z n . F1 F2 F3 ... Fn (4.3) Пример. 4.4. Определить координаты центра параллельных сил, системы состоящей из трех сил: F1, F2, F1, силы расположены аналогично таким же силам, изображенным на рас. 4.14. Величина сил и координаты точек их начал в сантиметрах: F1 = 38 кН, А (5; 6), F2 = 27 кН, В (18; 22), F3 = 62 кН, Е (24; 3). Решение. Используя уравнение 4.1 определяем координаты XС XC F1 x1 F2 x2 F 3x3 ... Fn xn 38 5 27 18 62 24 16,33 см; F1 F2 F3 ... Fn 38 27 62 используя уравнение 4.2 определяем координаты YС YC F1 y1 F2 y2 F3 y3 ... Fn yn 38 6 27 22 62 3 2,47 см. F1 F2 F3 ... Fn 38 27 62 Найденные координаты соответствуют положению точки С, которая и является центром параллельных сил. 4.2.3. Центры тяжести тел Рассмотрим тело, обладающее определенной массой. К такому телу будет приложена сила притяжения Земли, сила тяжести или мы говорим, что тело обладает весом. Тело можно разделить на ряд меньших объемов, и каждый выделенный меньший объем будет обладать своим весом, dG = dV·ρ·g, где dV – элементарный объем тела, м3, ρ – плотность, кг/м3, g – ускорение свободного падения тела, м/сек2. В результате получим систему параллельных сил (рис. 4.16). dG dG dG dG dG Рис. 4.16. Силы тяжести, приложенные к произвольно выделенным элементарным объемам тела 59 Как было показано ранее, см. формулы 4.1, 4.2, 4.3, можно определить центр параллельных сил, для веса (сил тяжести приложенным к каждой части тела) это будет центр тяжести тела. Если удерживать тело за его центр тяжести, то ни одна часть тела не будет перевешивать другую, независимо от того, как повернуть тело. Центр тяжести однородного и симметричного тела всегда лежит в плоскости его симметрии. Плоскость симметрии разделяет тело так, что каждой материальной точке расположенной слева от плоскости, соответствует такая же точка, расположенная справа и, соответственно, вес левой и правой части равны. Для решения инженерных задач часто необходимо находить центры тяжести плоских фигур. Вообще плоские фигуры не обладают весом т.к. не обладают объемом, но многие тела имеют одинаковое сечение по всей своей длине и для нахождения центра тяжести таких тел, достаточно найти центр тяжести этого сечения. Если условно наделить площадь плоской фигуры весом, то точно так же, как для объемного тела можно найти ее центр тяжести. При этом используют ряд приемов помогающих в нахождении центра тяжести: 1) устанавливают положение координатных осей; 2) определяют наличие симметрии площади сечения (центр тяжести сечения всегда лежит на оси симметрии); 3)разделяют площадь фигуры на простые по очертанию площади, для которых заранее известно положение центра тяжести; 4) определяют статический момент инерции простых фигур относительно координатных осей (рис. 4.17): Sx,i = Ai·yi ; (4.4) Sy,i = Ai ·xi, (4.5) где Sx,i Sy,I – статические моменты инерции простой фигуры, соответственно, относительно оси x, y; Ai – площадь простой фигуры; xi, yi – координаты центра тяжести простой фигуры; 5) определяют положение центра тяжести сложной фигуры по формулам: n Xc S i 1 xi Ai S x 1 S x 2 S x 3 ... S x n ; A1 A2 A3 ... An (4.6) n Yc S i 1 Ai yi S y 1 S y 2 S y 3 ... S y n A1 A2 A3 ... An , (4.7) Формулы 4.6, 4.7 аналогичны по структуре формулам 4.2, 4.3, только вместо сил Fi (равных весу частей тела) взяты площади этих частей Аi. Если часть площади фигуры отсутствует (имеются отверстия, либо она вырезана), то такая площадь наделяется отрицательным значением. Координаты центров простых фигур могут быть как 60 положительными, так и отрицательными, в зависимости от их положения по отношению к координатным осям. b D 1/3b 1/3h 1/2b 1/2h D/2 О h О О h D b Рис. 4.17. Простые фигуры и положение их центров тяжести К простым фигурам относят такие, центры тяжести которых, и их площади легко определяются или известны (рис. 4.17). Так для круга, центр тяжести О совпадает с геометрическим центром, а площадь равна А = πD2/4; для прямоугольной фигуры, центр тяжести расположен по длине на ½ b, а по высоте на ½ h, площадь равна А = b×h; для треугольной фигуры, центр тяжести расположен по длине на ⅓ b, а по высоте на ⅓ h, площадь равна А = b·h/2. Пример 4.5. Определить положение центра тяжести листа (рис. 4.18). Лист имеет круглое отверстие диаметром D = 20 см и прямоугольный вырез размером h =18 см, b = 24 см. Решение. 1. Устанавливаем положение координатных осей, совмещая их с краями листа; 2. Площадь круглого отверстия – А1 = πD2/4 = 3,14·202/4 = 314 см2; статические моменты круглого отверстия относительно осей Sx,1 = – А1·48 = – 314·48 = – 15072 см3; Sy,1 = – А1·21 = – 314·21 = – 6594 см3 (знак минус показывает, что площадь отсутствует); Отв. Ø 20 С D Yc 23 см В 33 см см Вырезано 18× 24 см А 48 см 66 см y 0 х Xc 21 см 45 см 67 см 90 см Рис. 4.18. Плоская фигура с отверстиями. К примеру 4.5 61 Площадь прямоугольного выреза – А2 = bh = 18·24 = 432 см2; статические моменты прямоугольного выреза Sx,2 = – А2·23 = – 432·23 = – 9936 см3; Sy,2 = – А2·67 = – 432·67 = – 28944 см3; Площадь листа вместе площадями занятыми отверстиями А3 = bh = 90·66 = 5940 см2; статические моменты листа Sx,3 = А3·45 = 5940·45 = 267300 см3; Sy,3 = А3·33 = 5940·33 = 196020 см3; 3. Определяем координаты центра тяжести всей фигуры: n Xc S i 1 xi Ai S x 1 S x 2 S x 3 ... S x n 15072 9936 267300 46,65 см; A1 A2 A3 ... An 314 432 5940 n Yc S i 1 yi Ai S y 1 S y 2 S y 3 ... S y n A1 A2 A3 ... An 6594 28944 196020 30,9 см. 314 432 5940 Определение центра тяжести плоских фигур важно для решения ряда задач по расчету строительных конструкций, сваренных из прокатных стальных элементов, или составленных из других конструктивных материалов. Сечение стального проката выполняют в виде двутавров, швеллеров, уголков, листов и др. Каталог производимых металлургическими заводами элементов называют сортаментом проката. Сортамент, кроме внешних форм и размеров производимых элементов, содержит их характеристики, позволяющие выполнять расчеты прочности. Ниже приведены сечения некоторых прокатных элементов (рис. 4.19, 4.20, 4.21). y r s Обозначения: h – высота балки, b – ширина балки, s – толщина стенки, t – средняя толщина полки, А – площадь сечения двутавра, см2. x t h x y b Рис. 4.19. Балки двутавровые (двутавры) стальные горячекатаные с параллельными гранями полок, типа Б (балочные), Ш (широкополочные), К (колонные). ГОСТ 26020 – 83 r h y0 t x0 R x z0 x x0 b Обозначения: h – высота полки, b – ширина полки, t – средняя толщина полки, z0 – расстояние до центра тяжести уголка, А – площадь сечения уголка, см2. y0 Рис. 4.20. Уголки стальные горячекатаные равнополочные. ГОСТ 8509 – 96 62 y t z0 Обозначения: h – высота швеллера; b – ширина швеллера; s – толщина стенки; t – средняя толщина полки; z0 – расстояние до центра тяжести швеллера, А – площадь сечения швеллера, см2. h r x s x R y b Рис. 4.21. Швеллеры с уклоном внутренних граней полок. ГОСТ 8240-97 Пример 4.6. Определить центр тяжести сечения колонны, сваренной из прокатных элементов (рис. 4.22). Швеллер № 30У (обозначен позицией 1) в соответствии с данными сортамента имеет площадь сечения А1 = 40,5 см2, расстояние до центра тяжести швеллера z01 = 2,52 см, высота швеллера h = 300 мм (см. ГОСТ 8240-97). Уголок 125×125×8 (позиция 2) имеет высоту и ширину полок 125 мм и среднюю их толщину 8 мм, площадь сечения одного уголка А2 = 19,69 см2, расстояние до центра тяжести z02 = 3,36 см (см. ГОСТ 8509-97). 1–1 3 3 2 z01 = х1 300 1 y 1 y1 y2 x С 0 z02 1 2 y1 1 y2 XС х2 550 мм Рис. 4.22. Колонна и ее сечение. К примеру 4.6 1 – швеллер № 30У; 2 – уголок 125×125×8; 3 – планка, соединяющая швеллер с уголком Решение. 1. Назначаем положение координатных осей в сечении колонны. В общем случае координатные оси х, у, можно проводить в любом, удобном для расчетов месте. Так как сечение колонны симметрично относительно горизонтальной оси, проводим ось х 63 по оси симметрии. Ранее отмечалось, что ось симметрии всего сечения всегда проходит через его центр тяжести, соответственно, при таком положении координатной оси Yc = 0; 2. Устанавливаем расстояния от центров тяжести каждой составляющей сечение фигуры до координатной оси у: расстояние от оси у1 (проходящей через центр тяжести швеллера) до основной оси у – соответствует расстоянию х1 = z01 = 2,52 см; расстояние от оси у2 (проходящей через центры тяжести уголков) до основной оси у – соответствует расстоянию х2 = 55 – z02 = 55 – 3,36 = 51,64 см; 3. Определяем статические моменты инерции отдельных фигур до оси у по формуле 4.5 (Sy,i = Ai ·xi): для первой фигуры Sy,1 = A1 x1 = 40,5·2,52 = 102,06 см3; для второй фигуры (учитывая, что имеем два симметрично расположенных уголка) Sy,2 = 2·A2·x2 = 2·19,69·51,64 = 2033,58 см3; 4. Определяем площадь сечения колонны А = А1 + 2А2 = 40,5 + 2·19,69 = 79,88 см2; 5. Определяем положение центра тяжести сечения колонны по формуле 4.6: n Xc S i 1 Ai xi S x 1 S x 2 S x 3 ... S x n 2033,58 25,46 см. A1 A2 A3 ... An 79,88 Положение центра тяжести сечения колонны определено (Xc = 25,46 см; Yc = 0). Задания для самостоятельной работы 4.2 300 100 1. Определить центр тяжести фигуры изображенной на рис. 4.23. Размеры указаны в мм. 270 Рис. 4.23. Фигура. К заданию 1 180 40 120 50 2. Определить центр тяжести фигуры изображенной на рис. 4.24. Размеры указаны в мм. 80 160 250 Рис. 4.24. Фигура. К заданию 2 3. Определить центр тяжести сечения балки изображенной на рис. 4.25. Балка выполнена из прокатного двутавра (позиция 1), номер двутавра 18 Б1 (высотой h =177 мм, шириной полки b = 91 мм, площадь А = 19,58 см2; центр тяжести двутавра совпадает с его 64 геометрическим центром), к двутавру приварены два равнополочных уголка (позиция 2), номер профиля 70×70×5 (размеры полок 70 мм, расстояние до центра тяжести z0 = 1,90 см, площадь одного уголка А = 6,86 см2). 2 z0 2 1 Рис. 4.25. Сечение балки. К заданию 3 4.3. Устойчивость равновесия С положением центра тяжести тела связано понятие равновесия тела или, иначе говоря, устойчивости тела против опрокидывания. Положение тела, при котором оно остается в покое, а при незначительном отклонении от положения равновесия возвращается в первоначальное состояние, считается устойчивым. При неустойчивом положении, тело не возвращается в первоначальное положение, если его отклонить от положения равновесия (рис. 4.26). в) б) а) Мопр k Муд h С С С С F3,опр F2,опр F1,опр Fуд г) k Fуд k Fуд k b/2 b Рис. 4.26. Равновесие тела: а) – устойчивое равновесие тела; б) – замена сил моментами относительно точки k; в) – переход от устойчивого равновесия к неустойчивому – тело отрывается от плоскости; г) – состояние неустойчивого равновесия 65 На тело в его центре тяжести, точке С действует вес тела, обозначенный как удерживающая сила Fуд и действует опрокидывающая сила Fопр. В результате воздействия сил, возможно опрокидывание (поворот) тела относительно точки k. Относительно точки k действуют: удерживающий момент Муд = Fуд·b/2 и опрокидывающий момент Мопр = Опрокидывание Fопр·h. произойдет, если опрокидывающий момент превысит удерживающий Мопр > Муд. В случае равенства опрокидывающего и удерживающего момента возникнет состояние неустойчивого равновесия (рис. 4,26,г), при котором тело может либо вернуться в исходное состояние, либо опрокинуться. На практике, для гарантии устойчивости тел, зданий, машин и т.п. считается, что опрокидывания не происходит в случае, если отношение Муд/Мопр соответствует коэффициенту устойчивости, который принимается k уст = 1,5 …. 2,0. Пример 4.7. Определить требуемую массу противовеса для башенного крана изображенного на рис. 4.27. В центрах тяжести отдельных элементов приложены их веса: вес башни Fбаш = 60 кН, вес стрелы Fстр = 35 кН, вес поднимаемого груза Fгруз = 50 кН, неизвестный вес противовеса Fпр. Опрокидывание крана возможно относительно точки В. Расстояния от нагрузок до линии проходящей через точку опрокидывания: b = 5,7 м, с = 3,0 м, a = 1,3 м, d = 15 м. Принятый коэффициент устойчивости k уст = 1,5. Решение. 1. Определяем опрокидывающие моменты Мопр = Fгруз·d + Fстр·a = 50·15+35·1,3 = 795,5 кН·м; 2. Определяем удерживающие моменты Муд = Fпр·b + Fбаш·с = Fпр·5,7+60·3,0 = Fпр·5,7+180 кН·м; 3. Устойчивость будет обеспечена, если удерживающие моменты больше опрокидывающих на величину коэффициента устойчивости k уст = 1,5. Муд = k уст ·Мопр; или Fпр·5,7+180 = 1,5·795,5; отсюда Fпр = 177,76 кН. Требуемая масса противовеса m = Fпр/g = 177,76/9,81 = 18,12 т, где g ускорение свободного падения. a Fбаш Fгруз Fпр А В Рис. 4.27. Башенный кран. К примеру 4.7 с b d 66 Задания для самостоятельной работы 4.3 1. Определить устойчивость водонапорной башни изображенной на рис. 4.28 относительно точки А. Коэффициент устойчивости принят k уст = 1,8. Горизонтальные силы от давления ветра F1 = 20 кН, F2 = 33,5 кН; вертикальные силы F3 = 180 кН, F4 = 26 кН. F3 F1 10,0 м 15,0 м F2 F4 А Рис. 4.28. К заданию 1 3,2 м 3,0 м 0,5 м 2. Объясните, какое положение тела (рис. 4.29) и почему является более устойчивым? 0,5 м 3,0 м Рис. 4.29. К заданию 2 4.4. Балки. Опоры балок. Определение реакций в опорах балок 4.4.1. Простые балки. Конструктивные и расчетные схемы балок Балкой называют прямоугольный брус, прикрепленный к основанию с помощью опор. Далее рассматриваем простые балки, которые имеют две опоры. Схема балки, отражающая ее конструкцию (форму и размеры сечения), материал, из которого она выполнена, точную конструкцию опор называют конструктивной схемой балки. Для определения опорных реакций в балке и действующих в ней усилий используют расчетные схемы. Расчетной схемой называется упрощенная схема, в которой фактическое сечение балки заменено ее геометрической осью закрепленной на опорах, а фактические 67 опоры заменены их расчетными аналогами (в простых балках одна опора принимается шарнирно-неподвижной, а другая шарнирно-подвижной). В расчетной схеме также не учитывается материал, из которого сделана конструкция (рис. 4.30). а) F В А б) HA А VA HA в) А F В VB F VA В l VB Рис. 4.30. Замена конструктивной схемы балки ее расчетными схемами: а – конструктивная схема балки; б, в – расчетные схемы балки (с разными вариантами изображения опоры А) Опора А принимается шарнирно-неподвижной, имеющей две связи (см. раздел 1.5), а опора В шарнирно-подвижной, имеющей одну связь. Изображение шарнирно- неподвижных опор показано на рис. 4.30,б и 4.30,в. Так как сила приложена наклонно по отношению к оси балки, она будет стараться сдвинуть балку вниз и в бок, справа на лево. Стержни связей препятствуют перемещению балки и в них возникают опорные реакции VA, HA, VB. Расчетная длина балки принимается равной расстоянию от середины опоры А до середины опоры В. 4.4.2. Консольные балки Балки, у которых один конец жестко закреплен (защемлен), а другой свободен, называется консолью (рис. 4.31), lоп – защемленный (опорный) участок балки. Многие строительные конструкции работают как консоли: балконные плиты, козырьки, карнизные плиты и т. д. На опорном участке консоли (в заделке) (рис. 4.31,б) возникают горизонтальная НА и вертикальная VА опорные реакции, а так же реактивный момент МА = VA2·а, или МА = – F· sin α·b, который противодействует внешнему моменту. 68 б) а) VA2 F А НА F НА А МА а VA1 VА A lоп α b l l Рис. 4.31. Консольная балка и ее расчетная схема Достаточно часто консольные участки, с одной или с двух сторон, имеются у простых балок (рис. 4.32). На опоре В балка не разрезается шарниром, а просто опирается на него сверху. F2 F1 HA А В VA VB l а Рис. 4.32. Простая балка с консольным участком 4.4.3. Определение опорных реакций в статически определимых балках Балки, находясь на опорах, должны оставаться неподвижными под действием любых сил. При этом в опорах возникают опорные реакции. Фактические опоры заменяются в расчетных схемах жесткими не сжимаемыми стержнями, реакции в этих стержнях и равны опорным реакциям балки. Статически определимые балки, т.е. такие, опорные реакции в которых можно определить решив систему из трех уравнений статики (уравнения 2.3, 3.4). Уравнения устанавливают, что балка не может смещаться по направлению оси х, по направлению оси у и не может вращаться под воздействием моментов. Ниже приведена система трех уравнений статики: n n n Fx = 0; i 1 Fy = 0; i 1 M i 1 i 0, или, используя упрощенную форму записи для первых двух уравнений, получим: n 1. ∑ X = 0; 2. ∑ Y = 0; 3. M i 1 i 0. 69 Третье уравнение применяется относительно точек в которых имеются шарниры, и , соответственно, для простой балки может быть представлено в виде двух уравнений, относительно точки А и точки В: (3,а). n n M А 0; i 1 (3,б). M i 1 В 0. Знаки моментов, которые создают силы относительно рассматриваемой точки, принимают условно, если сила стремится вращать по часовой стрелке, знак «плюс», против часовой стрелки – «минус», соответственно относительно одной точки сила может создавать момент со знаком «плюс», а относительно другой – «минус». Пример. 4.7. Определить опорные реакции в простой балке (рис. 4.33). Сила F = 68 кН действует под углом к оси балки α = 52°, расстояния a = 1,8 м, b = 3,2 м, l = 5,0 м. y Fy HA F А α В x Fx VA а VB b l Рис. 4.33. Простая балка. К примеру 4.7 Решение. 1. Показываем и обозначаем в точках А, В опорные реакции; 2. Определяем проекции силы на горизонтальную и вертикальную оси Fx = F ·cos α = 68·0,6157 = 41,87 кН, Fy = F ·sin α = 68·0,7880 = 53,58 кН, условно принимая начало координат в точке А и ось х совмещаем с осью балки; 3. Используем первое уравнение статики – сумма проекций всех сил на горизонтальную ось равна нулю. Если направление силы (проекции силы) совпадает с направлением оси, принимаем знак «плюс», не совпадает – знак «минус». 1. ∑ X = 0; расписываем уравнение, HA – Fx = 0; отсюда следует HA = Fx = 41,87 кН. Далее используем третье уравнение, определяя сумму моментов относительно точки А. n 3,а. M i 1 А 0; расписываем уравнение, – VB·l + Fy·а = 0; – VB·5,0 + 53,58·1,8 = 0; отсюда следует VB = 96,44/5,0 = 19,29 кН. Реакцию VA можно определить находя сумму моментов относительно точки В, либо из второго уравнения статики. n 3,б. M i 1 В 0; расписываем уравнение, VА·l – Fy·b = 0; VА·5,0 – 53,58·3,2 = 0; отсюда следует VА = 171,46/5,0 = 34,29 кН. Проверка. Неиспользованное второе уравнение можно применить для проверки проведенных вычислений 2. ∑ Y = 0; расписываем уравнение, VА – Fy + VB = 0; 34,29 – 70 53,58+19,29 = 0; проверка показывает, что уравнение выполняется (в правой и левой частях получаем ноль), следовательно, решение выполнено правильно. Если на балку действуют только вертикальные внешние силы, то и реакции возникают только вертикальные. Соответственно, при воздействии только горизонтальных (направленных вдоль оси балки) сил, возникают только горизонтальные реакции. Чем ближе к опоре вертикальная внешняя сила, тем большую реакцию в ней она вызывает и если на балку действует вертикальная сила непосредственно на опоре, реакция в этой опоре будет равна этой силе, а реакция на другой опоре будет равна нулю. Кроме сосредоточенных сил на балки часто действуют силы, распределенные по длине, которые характеризуются интенсивностью q кН/м (см. 1.3.1). При определении опорных реакций в балках, на которые приложены распределенные нагрузки, вначале нагрузки заменяются их равнодействующими, а затем все делается аналогично, как при действии сосредоточенных сил. Пример. 4.8. Определить опорные реакции в простой балке (рис. 4.34). На балку действует равномерно распределенная нагрузка интенсивностью q1 = 23 кН/м, q2 = 14 кН/м, расстояния a = 0,6 м, b = 1,4 м, c = 0,8 м, d = 1,2 м, l = 4,0 м. Решение. 1. Показываем и обозначаем в точках А, В опорные реакции; 2. Заменяем распределенную нагрузку равнодействующими: R1 = q1·b = 23·1,4 = 32,2 кН; R2 = q2·d = 14·1,2 = 16,8 кН, равнодействующие прикладываются в середине действия соответствующей распределенной нагрузки; y q2 q1 HA В А VA а R1 R2 с b d x VB Рис. 4.34. Балка. К примеру 4.8 l 3. Так как на балку не действуют горизонтальные нагрузки, из первого уравнения равновесия следует, что HA = 0; 4. Определяем сумму моментов относительно точки А, n используем уравнение M i 1 0; А 0; расписываем, – VB·l + R2·(а + b + c + d/2) + R1·(а + b/2) = – VB·4,0 + 16,8·3,4 + 32,2·1,3 = 0; отсюда следует VB = 98,98/4,0 = 24,75 кН; 71 5. Используем уравнение n M i 1 В 0; расписываем, VА·l – R1·(b/2 + c + d) – R2·d/2 = 0; VА·4,0 – 32,2 ·2,7 – 16,8·0,6 = 0; отсюда следует VB = 97,02/4,0 = 24,25 кН. Проверка. ∑ Y = 0; VА – R1 – R2 + VB = 0; 24,25 + 24,75 – 32,2 – 16,8 = 0, уравнение выполняется, следовательно, реакции определены правильно. В случае воздействия на балку моментов, они учитываются независимо от места их приложения по длине балки. Следует учитывать, что моменты не проектируются на оси координат. Пример. 4.9. Определить опорные реакции в простой балке (рис. 4.35). На балку действуют моменты М1 = 68 кН·м, М2 = 21 кН·м, расстояния a = 1,6 м, b = 2,3 м, c = 1,2 м, l = 4,1 м. y HA А М1 М2 В x VA а VB с b Рис. 4.35. Балка. К примеру 4.9 l Решение. 1. Показываем и обозначаем в точках А, В опорные реакции; 2. Так как на балку не действуют горизонтальные нагрузки, а моменты не проектируются на оси координат, из первого уравнения равновесия следует, что HA = 0; 3. Определяем сумму моментов n относительно точки А, используем уравнение M i 1 А 0; расписываем, – VB·l – М1 + М2 = 0; – VB·4,1 – 68 + 21 = 0; отсюда VB = – 47/4,1 = – 11,46 кН, знак «минус» показывает, что принятое направление реакции не правильно, фактически реакция VB направлена вниз. n 4. Используем уравнение M i 1 В 0; расписываем, VА·l – М1 + М2 = 0; VА·4,1 – 68 + 21 = 0; отсюда VА = 47/4,1 =11,46 кН. Проверка. ∑ Y = 0; VА + VВ = 0; 11,46 + (–11,46) = 0, уравнение выполняется, следовательно, реакции определены правильно. Реакция VВ направлена вниз. . В общем случае на балку действует комбинация различных сил и моментов, пользуясь такими же правилами можно определить ее опорные реакции. Координационные оси обычно не показывают, представляя их положение мысленно. 72 Пример. 4.10. Определить опорные реакции в балке (рис. 4.36). На балку действуют: равномерно распределенная нагрузка интенсивностью q1 = 38 кН/м, сосредоточенные силы F1 = 46 кН действует под углом к оси балки α = 65° и сила F2 = 82 кН и момент М = 35 кН·м. Расстояния: a = 0,9 м, b = 2,2 м, c = 1,1 м, l = 4,2 м, d = 1,5 м. α F1 q1 F2 М1 HA А В R1 VA а b l с VB d Рис. 4.36. Балка. К примеру 4.10 Решение. 1. Показываем и обозначаем в точках А, В опорные реакции; 2. Определяем проекции силы F1 на горизонтальную и вертикальную оси: F1,x = F1·cos α = 46·0,4226 = 19,44 кН, F1,y = F1·sin α = 46·0,9063 = 41,69 кН; 3. Заменяем распределенную нагрузку равнодействующей: R1 = q1(а + b) = 38·3,1 = 117,8 кН; 4. Используем первое уравнение статики ∑ X = 0; расписываем уравнение, HA + F1,x = 0; отсюда следует HA = – F1,x = – 19,44 кН, знак минус показывает, что направление реакции HA принято неправильно, и она действует в противоположную сторону, при этом ее цифровое значение не изменится; 5. Определяем сумму моментов относительно точки А, используем уравнение n M i 1 А 0; расписываем, – VB·l – М1 + F2·(а+b) + F1,y·а + R1·(а+b)/2 = 0; – VB·4,2 – 35 + 82·3,1 + 41,69·0,9 + 117,8·1,55 = 0; отсюда VB = 439,31/4,2 = 104,6 кН; 6. Используем уравнение n M i 1 В 0; расписываем, VА·l – F1,y·(b+с) – F2·с – R1·[(l – (а+b)/2] – М1 = 0; VА·4,2 – 41,69·3,3 – 82·1,1 – 117,8·2,65 – 35 = 0; отсюда VА = 574,95/4,2 =136,89 кН. Проверка. ∑ Y = 0; VА – F1,y – F2 – R1 + VВ = 0; 136,89 – 41,69 – 82 – 117,8 + 104,6 = 0, уравнение выполняется, следовательно, реакции определены правильно. Задания для самостоятельной работы 4.4 1. Определить опорные реакции балки изображенной на рис. 4.37. Модуль силы F1 = 134 кН, интенсивность распределенной нагрузки q1 = 41 кН/м, расстояния: a = 2,0 м, b = 2,6 м, c = 1,4 м, l = 6,0 м. 73 q1 F1 В А а b с Рис. 4.37. Балка. К заданию 1 l 2. Определить опорные реакции балки изображенной на рис. 4.38. Модуль силы F1 = 74 кН, интенсивность распределенной нагрузки q1 = 55 кН/м, расстояния: a = 3,0 м, b = 1,5 м, l = 4,5 м. q1 F1 А В а Рис. 4.38. Балка. К заданию 2 b l 3. Определить опорные реакции балки изображенной на рис. 4.39. Модуль силы F1 = 49 кН, момент М1 = 59 кН·м, интенсивность распределенной нагрузки q1 = 62 кН/м, расстояния: a = 1,6 м, b = 2,3 м, c = 1,6 м, l = 5,5 м. F1 М1 В А а b с Рис. 4.39. Балка. К заданию 3 l 74 Литература 1. М. С. Мовнин, А. Б. Израелит, А. Г. Рубашкин. «Основы технической механики». – СПб.: Политехника, 2000. 2. В. И. Сетков. «Сборник задач по технической механике». – М.: Издательский центр «Академия», 2004. 3. В. И. Сетков. «Техническая механика для строительных специальностей». – М.: Издательский центр «Академия», 2007. 4. А. И. Аркуша. «Техническая механика. Теоретическая механика и сопротивление материалов». – М.: «Высшая школа», 2003. 75