ГезаЕгоровЮшин_Особенности
реклама

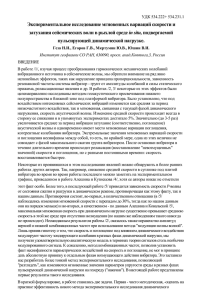
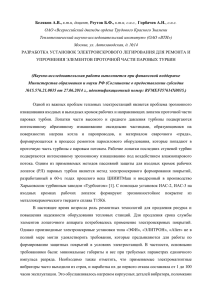
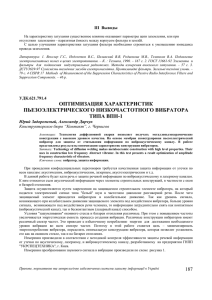
Особенности напряженного состояния рыхлой среды, подвергаемой пульсирующей нагрузке Геза Н.И., Егоров Г.В., Юшин В.И. Институт геофизики СО РАН, 630090, просп. акад.Коптюга,3, Россия Основным методом экспериментального исследования нелинейных свойств упругих сред считается метод бигармонических воздействий – одновременное зондирование среды двумя различными фиксированными частотами. Нарушение принципа суперпозиции при прохождении таких колебаний через изучаемую среду приводит к появлению в регистрируемом отклике комбинационных частот, свидетельствующих об отклонении диаграммы "напряжение-деформация" от закона Гука. Эффект иногда называют "модуляцией звука звуком". Однако этот метод носит интегральный характер. Он не позволяет определить, за счет каких именно свойств среды, а именно, изменений поглощения или изменений скорости, происходит взаимная модуляция сейсмических колебаний. На рис.1 показан типичный результат бигармонического эксперимента /1/. На верхнем графике приведен амплитудный спектр мощного низкочастотного вибратора, на нижнем – спектр комбинационных частот при просвечивании среды акустическим сигналом во время работы такого вибратора. Из графиков на рис.1 видно, что сигнал вибратора, содержащий кроме 1-й также 2-ю и 3ю гармоники, модулирует высокочастотную волну всеми тремя своими гармониками, причем, чем выше порядок гармоники вибратора, тем сильнее ее модулирующее действие. Также видно, что правая и левая комбинационные частоты одного и того же номера гармоники вибратора, имеют разные амплитуды. С точки зрения радиотехники такая модуляция парадоксальна. Там, чтобы выделить только одну боковую частоту применяют специальные устройства. Простая же модуляция, будь то амплитудная или фазовая, всегда дает две зеркально одинаковых боковых полосы. Попытка разобраться в этом парадоксе привела к созданию нового метода исследования нелинейных свойств среды. Метод, названный корреляционно-стробоскопическим (КСМ). Так же, как и бигармонический, он основан на возмущении среды мощным низкочастотным колебанием постоянной частоты (т.н. "накачкой") и одновременном просвечивании ее высокочастотным зондирующим воздействием, но не постоянной частоты, а частотномодулированным, так называемым свип-сигналом. Использование такого сигнала позволяет получить отклик среды на мощное импульсное зондирующее воздействие, оставаясь, однако, в щадящей линейной области зондирующих воздействий, и "предоставляя право" изменять параметры среды только мощной "накачке". Таким образом, в этой части метода используется хорошо известный вибросейсмический способ зондирования, в основе которого лежит процедура корреляции. Новое же заключается в том, что корреляция, выполняется лишь после дополнительной операции стробирования, синхронизованного с накачкой. Стробирование привязывается к различным фазам накачки и тем самым позволяет получить из одного сеанса зондирования целый ансамбль импульсных сейсмограмм, характеризующих поведение среды в разных фазах динамического воздействия. Ниже мы остановимся на сущности метода подробнее. На рис.2 показана схема эксперимента, в котором исследовались нелинейные параметры среды с помощью КСМ-метода. Установка состоит из низкочастотного вибратора В, служащего для создания пульсирующей нагрузки на массив находящегося под ним грунта, высокочастотного излучателя И, предназначенного для акустического просвечивания этого массива, и нескольких измерительных скважин. Вибратор В дебалансного типа (с приводом от прецизионно управляемых по частоте и фазе 1 электродвигателей с платформой площадью 9 м2 и общей массой 35 тонн) способен развивать переменное давление с амплитудой до 35 тонна-сил. Акустический излучатель И пьезокерамического типа имеет собственную частоту резонанса 900 Гц, площадь платформы 0,2 м и способен развивать полную мощность до 1 кВА. Скважины снабжены герметичной пластиковой обсадкой и заполнены керосином. В качестве скважинных датчиков использованы морские пьезокерамические сейсмоприемники типа ПДС-21, реагирующие на давление. Кроме того, в устье скважины 1 установлен такой же датчик, контролирующий излучаемый (зондирующий) сигнал, а на поверхности у устья скважины 2 – акселерометр. Глубину погружения датчиков давления легко изменять, не заботясь о прижиме к стенке скважины. Ряд дополнительных скважин, изображенных на рис. 2, использовались для исследования сейсмического разреза. Как видно из схемы, протяженности анализируемых сейсмических лучей составляли от 5 до 20 м при средней длине волны около 2 м, благодаря чему эффекты на контактах горной породы с излучателем и приемником почти не сказывались на результатах. Таким образом, первая методическая задача, состоявшая в создании искусственных контролируемых динамических напряжений в достаточно большом (представительном) объеме среды, была решена путем использования мощного низкочастотного вибратора, который создавал периодическую пульсирующую нагрузку ("накачку") на массив находящегося под ним грунта. Переменную нагрузку, в отличие от статической, можно контролировать с помощью комплекса сейсмических датчиков, датчиков давления и деформаций. Вторая и главная методическая задача заключалась в том, чтобы зарегистрировать изменения основных параметров среды в каждой мгновенной фазе нагрузки. Очевидно, что важнейшими из таких параметров являются скорости продольных и поперечных волн и поглощение. Эти параметры можно измерить, если просвечивать нагружаемый массив искусственными сейсмическими волнами, достаточно высокочастотными по сравнению с частотой циклов "накачки" (будем называть эти зондирующие воздействия акустическими, чтобы оттенить их спектральный состав – звуковой диапазон частот). Чем шире спектр зондирующих сигналов, тем выше их разрешающая способность по времени пробега, и тем выше чувствительность к вариациям других параметров. Вместе с тем, низкочастотное возмущающее воздействие, также неизбежно сопровождается дополнительным сторонним шумом в акустическом диапазоне, уровень которого может в несколько раз превышать уровень просвечивающего акустического сигнала. Этот шум порождается работой механической конструкции, генерирующей пульсирующую "накачку", а также спорадической акустической эмиссией в динамически возмущенном грунтовом массиве. В результате прямая регистрация зондирующего акустического сигнала во время работы вибратора, становится практически невозможной. Увеличение разноса по частоте за счет повышения частоты зондирующего сигнала с целью улучшения частотной селекции в данном случае проблемы не решает, поскольку сопровождается увеличением затухания сигнала в среде, в результате чего отношение сигнал/шум не только не возрастает, но может снизиться. Таким образом, основная техническая трудность в измерении мгновенных вариаций параметров среды состояла в несовместимости весьма малого допустимого времени измерений в каждой фазе пульсирующей нагрузки и необходимого большого времени накопления для получения приемлемого отношения сигнал/шум. Действительно, при циклической нагрузке нельзя остановить этот процесс в какой-то фиксированной фазе с тем, чтобы дать время для точного измерения упругих параметров, соответствующих именно этому значению напряженного состояния среды. Поэтому накопление энергии зондирующих колебаний необходимо вести прерывисто, небольшими порциями, добавляя в каждом цикле нагрузки только ту их часть, которая соответствует именно данной выбранной фазе нагрузки. В этом и состоит главная отличительная особенность корреляционно-стробоскопического, метода, который оказался чрезвычайно эффективным. 2 Рассмотрим подробнее идею метода. Пусть исследуемая среда возмущается гармоническими колебаниями с некоторой постоянной частотой (лежащей, в нашем случае, в полосе от 3 до 10 Гц) и одновременно просвечивается акустическим колебанием, которое представляет собой медленную плавную развертку частоты (например, в диапазоне от 50 до 500 Гц. Как известно, для преобразования в импульсную форму принятый сигнал необходимо свернуть (прокоррелировать) с зондирующим. Очевидно, что акустический сигнал будет содержать информацию обо всех состояниях среды за время зондирования. Необходимо же выделить из него только ту часть, которая относится к какой-то определенной фазе нагрузки. С этой целью акустический сигнал после необходимого усиления и оцифровки, но до корреляции, подвергается стробированию с частотой низкочастотного возмущения в соответствующей фазе последнего, а только затем – корреляции. Простробированный акустический сигнал представляет собой "гребенку" из фрагментов непрерывного колебания, содержащую лишь ту информацию об акустическом сигнале, которая относится только к избранной фазе "накачки". Можно показать, что при определенных соотношениях параметров просвечивающего свип-сигнала и низкочастотного возмущения стробирование не вносит искажений в коррелограмму. Выполняя многократно корреляцию записи акустического сигнала, простробированного с разными фазами, с зондирующим сигналом, получаем семейство импульсных акустограмм для всех фаз нагрузки массива вибратором, что и требуется. Далее остается только выделить вариации амплитуд и времен пробега. Учитывая, что последние могут меняться меньше, чем на интервал дискретизации, применяется один из тонких методов выделения относительных задержек (интерполяционный или взаимных фазовых спектров). Остановимся на особенностях волнового поля в ближней зоне вибратора, который эту нагрузку создает. Это необходимо сделать, чтобы соотнести наблюдаемые вариации акустической волны с вариациями напряженно-деформированного состояния просвечиваемой среды (суглинка). Методика эксперимента предусматривала, что одновременно с акустическим зондированием (частотный диапазон 70-350 Гц) измерялась непосредственно виброскорость колебаний платформы низкочастотного вибратора. Другие необходимые параметры, такие как напряжение и деформация среды под платформой, связанные с низкочастотной «накачкой», измерялись в отдельном эксперименте также совместно с виброскоростью платформы. Колебания платформы регистрировались датчиком-велосиметром сейсмического типа ВИБ-А (собственная частота 2 Гц, затухание практически нулевое). На частотах 6-8 Гц такой датчик имеет нулевой фазовый сдвиг по скорости и, следовательно, интеграл от его сигнала пропорционален вибросмещению платформы также без какого-либо фазового сдвига. Напряжение в грунте на глубине около 20 см под платформой измерялось мембранным тензометрическим датчиком давления, размещенным в наклонно пробуренной скважине. После установки датчика скважина засыпалась грунтом, извлеченным при бурении, и слой за слоем тщательно утрамбовывалась. Датчик и тензоусилитель были выполнены по схеме постоянного тока и, следовательно, также не вносили фазовых искажений в низкочастотный сигнал. Деформации измерялись деформографом индукционнотрансформаторного типа, размещенном на вертикальной стенке ямы у края платформы вибратора. База деформографа составляла 70 см. Одновременная регистрация всех перечисленных параметров показала, что в частотном диапазоне 6-7 Гц, где колебания имеют чисто синусоидальную форму, смещение платформы, давление под нею и деформация грунта находятся в одной и той же фазе (с точностью до противофазы ± 10). Выше 7.5 Гц, когда резко возрастает амплитуда колебаний, а их форма приобретает пилообразный характер, такие измерения провести не удалось вследствие быстрого ухудшения контакта мембраны датчика давления с породой. 3 Остановимся теперь подробнее на результатах корреляционно-стробоскопического зондирования рыхлой среды при пульсирующем динамическом воздействии. На рис.3 представлен результат расщепления одной из сейсмотрасс акустического просвечивания подвибраторного пространства по 15 фазам пульсирующего воздействия вибратора на грунт. Подробности в подрисуночной подписи. На рис.4а показан результат расщепления еще одной такой сейсмограммы по 16 фазам нагрузки, а на рис. 46 – результат амплитудно-скоростного анализа расщепленных сейсмограмм по наиболее интенсивному волновому импульсу на 40-й мс. Амплитуда А акустической волны представлена в абсолютных условных единицах, время пробега – как отклонение t от абсолютного номинального времени в мс. Кроме того, на графике показана функция В вибросмещения платформы, которая в данном случае заметно отличается от синусоиды. На этом графике хорошо видно, что амплитуда и скорость, достигают максимума хотя и вблизи фазы максимального сжатия грунта, но не одновременно. Амплитуда отстает от скорости как в фазе сжатия, так при достижении локального экстремума в фазе разгрузки. Этот факт еще раз подтверждает различие постоянных времени релаксации скорости и поглощения, которое наблюдалось в статике после остановки вибратора: скорость состояния покоя восстанавливалась значительно быстрее, чем прозрачность среды. Как можно заметить по рис.4б, форма вариаций времени пробега и амплитуды характеризуются наличием интенсивной 2-й гармоники. Это наводит на мысль о значительном понижающем влиянии модуля скорости деформации на скорость упругих волн в рыхлой среде. Мы попытались получить численную модель сигнала, похожего по форме на наблюдаемые вариации амплитуды и скорости волн. На рис.5 показан процесс и результат такого моделирования. Синусоидальная функция "накачки" (линия 1 на рис. 5а) подвергается дифференцированию и выпрямлению (линия 2 на рис. 5а). Последняя берется с разными весами в диапазоне от 0 до 1 и суммируется с линией 1, в результате чего получается семейство линий 3 на рис.5а. Далее это семейство подвергается низкочастотной фильтрации, как это имеет место с реальными сигналами, в результате чего получаем семейство функций 1 - 3, представленное на рис.5b. Как видим, среди линий этого семейства есть очень похожие на вариации, наблюдаемые на рис.4b. На основе полученных экспериментальных данных и моделирования мы пришли к следующей феноменологической модели динамической (во времени) зависимости скорости v волны от мгновенной динамической деформации : v v0 1 a0 a1 a2 , t t где v0 – скорость волны в невозмущенной среде, – мгновенная скорость динамической t средний по времени модуль скорости деформации, а 0 , а1, а2 – t положительные постоянные. деформации, Здесь а0 определяется нелинейностью статической характеристики "деформация напряжение" и имеет физический смысл общепринятого параметра нелинейности /4 - 6/. Коэффициент а1 определяет относительный уровень мгновенных вариаций скорости, а2 определяет снижение средней скорости. Разумеется, надо иметь в виду, что отрицательному значению соответствует сжатие среды. Поэтому при максимальном сжатии мгновенная 4 скорость упругих волн согласно этой формуле будет максимальна. В действительности, наблюдается некоторое смещение максимума, обусловленное релаксацией. Предполагается также, что максимальное значение суммы всех переменных слагаемых, зависящих от динамической деформации, много меньше 1. В экспериментах наибольший вес (около 0,05) имело слагаемое с коэффициентом а2, зависящее от среднего значения модуля скорости деформации, и определяющее изменение средней скорости упругих волн. Стала также понятна и природа эффекта неравенства правой и левой боковых частот при бигармоническом воздействии, о чем мы упомянули в начале доклада. Она связана с одновременным присутствием амплитудной и фазовой модуляции в комбинационном сигнале. Кроме того, было установлено, что под воздействием интенсивных сейсмических колебаний изменяется как средняя за период низкочастотного воздействия, так и мгновенная, связанная с текущей фазой динамического нагружения, скорость акустической волны. Изменение средней скорости происходит всегда в сторону ее снижения и в упомянутых экспериментах достигало 5%. Значительно (до 3-5 раз) увеличивается среднее за период вибрации затухание (соответственно, поглощение) акустической волны и одновременно имеют место мгновенные вариации поглощения, когерентные колебаниям вибратора. Экстремальные значения мгновенных вариаций скорости и поглощения несинфазны между собой и не совпадают с фазой максимального сжатия грунта вибратором. После остановки вибратора в течение длительного времени происходит релаксация (восстановление "невозмущенных" значений) скорости и поглощения, но с разными постоянными времени: скорость восстанавливается быстрее. Выводы Таким образом, с помощью корреляционно-стробоскопического метода экспериментально показано, что - состояние среды при пульсирующей динамической нагрузке (по крайней мере, для рыхлой среды типа суглинка) не является усреднением мгновенных статических состояний, из которых складывается переменная деформация. Это качественно и количественно иное состояние, характеризующееся общим понижением скоростей продольных волн и возросшим их поглощением. Любое мгновенное значение скорости в динамически возмущенной среде всегда ниже ее значения при отсутствии возмущения. Аналогично, любое мгновенное значение поглощения в присутствии возмущения всегда выше, чем в отсутствие последнего. - При одновременном воздействии на нелинейную среду колебаний двух разных частот каждый из них изменяет упругие свойства среды в зависимости от своей частоты и интенсивности и тем самым влияет на прохождение другого колебания. В конечном итоге это выглядит как модуляция одного колебания другим. При этом вариации поглощения вызывают амплитудную модуляцию, а вариации скорости – фазовую. Совместное присутствие сразу двух типов модуляции приводит к неравенству зеркальных боковых частот в спектре бигармонического колебания, прошедшего через такую среду. - В процессе периодической динамической деформации среды скорости и поглощение меняются по величине хотя и синхронно с внешней нагрузкой (причиной деформации), но несинфазно относительно друг друга, что свидетельствует о разных постоянных времени релаксации этих двух параметров. Как правило, скорость волны реагирует на изменение напряженного состояния быстрее, чем поглощение. Вместе с тем, поглощение значительно (на порядок) более чувствительно к динамической нагрузке, чем скорость. - На мгновенные вариации скорости упругих волн и их поглощения в рыхлой среде, подвергаемой пульсирующей деформации, помимо самой деформации, существенное понижающее влияние оказывает абсолютная величина скорости этой деформации, 5 независимо от ее знака, что, в частности, и вызывает появление интенсивных высших гармоник в вариациях указанных параметров. Работа выполнена при поддержке РФФИ, гранты 00-05-65276, 03-05-64944 Литература 1. Геза Н.И., Егоров Г.В., Мкртумян Ю.В., Юшин В.И. Экспериментальное исследование мгновенных вариаций скорости и затухания сейсмических волн в рыхлой среде in situ, подвергаемой пульсирующей динамической нагрузке // Геология и геофизика. - 2001. Т. 42. № 7. С. 1137-1146. Подписи к рисункам к статье "Особенности напряженного состояния рыхлой среды, подвергаемой пульсирующей нагрузке". Авторы: Геза Н.И., Егоров Г.В., Юшин В.И. Рис.1. Типичный результат бигармонического эксперимента – просвечивания нелинейной среды одновременно двумя разнесенными фиксированными частотами. На верхнем графике показан спектр низкочастотного колебания ("накачки"), на нижнем – спектры высокочастотного зондирующего колебания, полученный при отсутствии "накачки" (верхний график) и комбинационного сигнала в присутствии "накачки" (нижний график). Рис.2. Схема натурного эксперимента по просвечиванию грунта, подвергаемого пульсирующей нагрузке. Пояснения в тексте. Рис. 3. Вариации Р-волны в суглинке под действием динамической нагрузки, измеренные методом акустического просвечивания грунта под платформой сейсмического вибратора. Правый рисунок – акустическая сейсмограмма, расщепленная по 8 равноотстоящим фазам смещения платформы за 2 полных периода колебаний. Верхняя трасса 0 – сейсмограмма покоя (вибратор не работает), трасса 1 соответствует верхнему положению платформы, трасса 5 – нижнему положению. Левый рисунок – совместный график вариаций времени пробега Δt, амплитуды волны ΔА и положения платформы В, полученный из сейсмограмм, представленных на правом рисунке. Полный диапазон графика по относительной задержке составляет 4.6 %, по амплитуде – 20 %, амплитуда колебаний платформы на частоте 6.2 Гц – 1 мм. Рис. 4. Вариации сейсмограммы (а) и параметров Р-волны (б) под действием интенсивной пульсирующей нагрузки на нелинейную среду: а - расщепленная по 16 фазам динамического нагружения грунта акустическая сейсмограмма просвечивания массива грунта под платформой мощного вибратора, зарегистрированная в скважине на глубине 6 м у края виброплатформы. б - вариации амплитуды (А) и времени (Δt) пробега волнового импульса с временем прихода 40 мс совместно функцией смещения платформы вибратора В, мм. Рис.5. Результат численного моделирования формы функции вариации как зависящей от величины нагрузки и модуля ее скорости. 6