Медиа:Моделирование движения тела
реклама

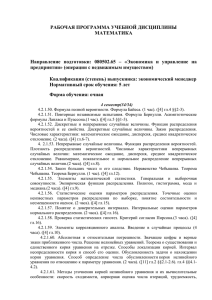
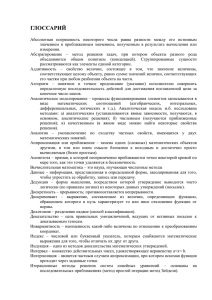
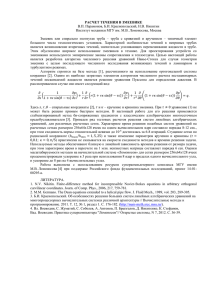
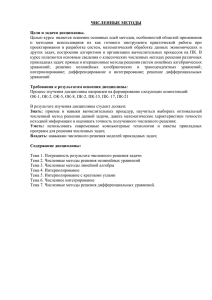
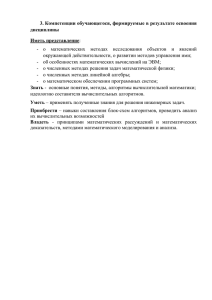
Задача 1. Рассмотрим задачу о моделировании движения тела и акцентируем внимание на проверке адекватности модели согласно принципу соответствия, т.е. на каждом этапе будем уточнять область действия модели. Постановка задачи. Построить модель движения тела в гравитационном поле Земли. Исходные данные. Начальное положение тела, начальная скорость и угол движения тела. Модель должна позволять вычислять положение тела в любой момент времени. Физическая постановка задачи. Тело движется из положения с координатами x 0 , y 0 с начальной скоростью v0 , отношению к угол направления горизонту равен скорости 0 . по Требуется определить координаты тела и скорость движения тела в зависимости от времени, а также построить Рис. 2.3. К постановке траекторию движения тела (см. рис 2.3). Физическая постановка задачи формулируется со следующими гипотезами: Объектом моделирования является тело, задачи о движении тела принимаемое за материальную точку. Движение тела происходит в поле тяжести Земли с постоянным ускорением g . Движение тела происходит в одной плоскости, перпендикулярной поверхности Земли и подчиняется основному уравнению динамики (второму закону Ньютона) mdv F. dt Пренебрегаем сопротивлением воздуха. Рассмотрим особенности данной задачи в соответствии с введенными гипотезами. Гипотеза о том, что тело можно считать материальной точкой, широко применяется для исследования движений тел в механике. Она накладывает ограничения на рассматриваемое тело (размеры тела значительно меньше всех рассматриваемых в задаче расстояний). Использование гипотезы о постоянстве силы тяжести возможно при учете того, что начальное положение тела будет намного меньше радиуса Земли. В соответствии с законом всемирного тяготения сила, действующая на тело массы m , равна F G M m , где y – расстояние от поверхности до ( R y) 2 Земли, R – радиус Земли, M – масса Земли. Считать силу тяжести постоянной будет справедливо при y R . Гипотеза о движении мяча в плоскости, перпендикулярной поверхности Земли, ограничивает класс рассматриваемых траекторий и значительно упрощает модель. Гипотезу о применимости в данном случае законов классической механики можно обосновать огромным экспериментальным материалом, связанным с изучением движения тел вблизи поверхности Земли со скоростями много меньше скорости света. Последнее допущение об отсутствии влияния сопротивления воздуха является наименее обоснованным. При движении тела в газе или жидкости сила сопротивления увеличивается с ростом скорости движения. Учитывая невысокие скорости движения тела и малые дальности бросков, указанное предположение может быть использовано с тщательной последующей проверкой получаемых результатов по отношению к экспериментальным результатам. На этапе создания математической модели учащиеся должны выбрать математические методы и средства описания модели; описать математическую модель и проверить корректность математической модели (проверить размерность, порядок, характер зависимостей, экстремальных ситуаций, граничных условий, математической замкнутости). Рассмотрим примеh из задачи 1. Математическая постановка задачи для тела, брошенного под углом к горизонту, в дифференциальных уравнениях примет вид: d 2x 2 0 dt , 2 d y g dt 2 при начальных условиях x(0) x0 , y(0) y0 , v x (0) v0 cos( ) , v y (0) v0 sin( ) . С математической точки зрения задача свелась к задаче Коши для системы ОДУ первого порядка с заданными начальными условиями. Полученная система уравнений является замкнутой, так как число независимых уравнений (4 дифференциальных) равно числу искомых параметров задачи ( x , y , v x , v y ). Существование и единственность решения задачи Коши доказана математиками. Поэтому данную математическую модель можно считать корректной. На этапе создания компьютерной модели при выборе метода решения необходимо обратить внимание на определение погрешностей вычислений на компьютере. Можно выделить три основных составляющих возникающей погрешности при численном решении исходной задачи: − неустранимая погрешность, связанная с неточным заданием исходных данных задачи (начальные и граничные условия, коэффициенты и правые части уравнений); − погрешность метода, связанная с переходом к дискретному аналогу исходной задачи (например, заменяя производную у′(х) разностным аналогом y( x x) y( x) x , получаем погрешность дискретизации, имеющую при x 0 порядок x ); − ошибка округления, связанная с конечной разрядностью чисел, представляемых в ПК. Рассмотрим этот этап на примере задачи 1. Создание компьютерной моедли. Для решения задачи, сводящейся к отысканию решения системы дифференциальных уравнений второго порядка, будем использовать численные методы. Воспользуемся методом Рунге–Кутта четвертого порядка, поскольку он имеет малую погрешность вычислений, пропорциональную пятой степени шага [Бахвалов Н.С., Жидков Н.П., Кобельков Г.М. Численные методы. М.:ЛБЗ, 2001 г. 632 с.]. Рассмотрим последовательность действий, реализующих решение этой задачи в пакете Mathcad. 1. Задание начальных данных: Координата начального положения тела по оси Y: X 0 : 0 Координата начального положения тела по оси X: Y 0 : 0 Начальная скорость: V 0 : 3 Начальный угол движения тела: 0 : 6 2. Задание вектора начальных условий для решения системы уравнений движения : X0 V 0 cos( ) 0 y : Y0 V 0 sin( 0 ) 3. Задание вектор–функции, возвращающей значения первых производных: y1 0 D(t , y ) : y3 g 4. Нахождение численного решения ДУ на интервале [0; 0.75] методом Рунге-Кутта четвертого порядка (решением ДУ является матрица Z размерности 5200, в которой: Z<0> – время, Z<1> – значения координаты x, Z<2> – значения проекции скорости на ось OХ, Z<3> – значения координаты y, Z<4> – значение проекции скорости на ось OY (рис. 2.4)). Z : rkfixed( y,0,0.31,200, D) Рис.2.4 5. Построение траектории движения тела (рис. 2.5) и графика зависимости скорости от времени (рис. 2.6): Рис. 2.5 Вычисления значения вектора скорости от времени (Z<2> – значения проекции скорости на ось OХ, Z<4> – значение проекции скорости на ось OY): V : Z 2 Z 4 Рис. 2.6 6. При проведении численного решения задачи необходимо убедиться в устойчивости полученного результата решения. Одним из признаков устойчивости полученного решения является точность выполнения закона сохранения полной энергии системы на каждом шаге численного интегрирования. Вычисление полной энергии сиcтемы на каждом шаге интегрирования: E m V 2 mgZ 3 2 Рис. 2.7. Полная энергия системы На рис. 2.8 представлена мгновенная относительная погрешность выполнения закона сохранения энергии от времени, вычисленная по формуле: i : E0 Ei 100 , E0 где i – дискретная переменная, используемая для нумерации массива значений полной энергии системы в соответствующий момент времени, изменяется от 0 до 200; i – относительная погрешность решения на i-том шаге; E0 – значение полной энергии системы в начальный момент времени; Е i – значение полной энергии системы в i-тый момент времени. Рис. 2.8. Из рис. 2.8 видно, что относительная погрешность не превосходит 0,02 %, что позволяет признать решение системы ДУ устойчивым. Данная задача имеет аналитическое решение: v x (t ) v 0 cos( ) x(t ) x v cos( ) t 0 0 . v y (t ) v 0 sin( ) g t 2 y (t ) y 0 v 0 sin( ) t g t 2 Для оценки точности численного решения полезно сравнить зависимости разности скорости и координаты от времени, полученные численным решением уравнения с аналогичными зависимостями, выраженными аналитически (рис. 2.9). Рис 2.9. Разности между точным (2) и численным решениями систему ОДУ: (1) x t xчисл t ; (2) y t yчисл t , (3) v t vчисл t Анализ зависимостей, представленных на рис. 2.9, показывает, что разность между численным и аналитическим решением со временем увеличивается, однако даже в конечной точке она не превышает значения равного 4 10 15 , что свидетельствует о высокой точности численного решения. На аналитическом этапе необходимо выполнить анализ упрощений, которые были сделаны во время физической постановки задачи, оценить их физический смысл, а также определить границы применимости полученной модели. Поскольку предыдущие этапы мы рассматривали с анализом влияния выполняемых действий на точность получаемого решения, а значит и на адекватность модели, считаем необходимым, на примере задачи 1, в этом пункте рассмотреть границы применимости модели, в рамках которых получаемые результаты будут правдоподобны. При физической постановке задачи нами было наложено ограничение на расстояние тела от поверхности Земли. Рассмотрим начальное значение скорости. При бросании тела с некоторой высоты параллельно земной поверхности дальность полета будет тем большей, чем больше начальная скорость (рис. 2.10). Рис. 2.10. Траектории дальности полета при различных скоростях При больших значениях начальной скорости становится необходимо учитывать шарообразность Земли и изменение направления вектора силы тяжести в разных точках траектории (рис. 2.11). При значении скорости V 0 1000 тело будет падать на поверхность Земли, однако дальность полета сравнима с радиусом Земли, и плоскостная модель Земли, не учитывающая её форму, является непригодной. При скорости V 0 8000 тело не упадет на Землю, а будет бесконечно обращаться вокруг Земли, т.е. станет искусственным спутников Земли. Рис. 2.11 Таким образом, в построенной модели задаваемое начальное значение скорости для правдоподобного отражения результатов должно быть небольшим. Итак, построенная модель будет адекватна рассматриваемому процессу при выполнении следующих условий: − размеры тела много меньше всех рассматриваемых в задаче расстояний; − расстояние от тела до поверхности Земли много меньше радиуса Земли; − высота и дальность полета тела являются небольшими (~10-20 м); − невысокая начальная скорость движения тела (~10 м/с). При увеличении начального значения скорости необходимо строить новую модель движения тела с учетом силы трения, а при скоростях близких к первой космической скорости – модель движения тела под действием центральных сил. Итак, построенная модель будет адекватна рассматриваемому процессу при выполнении следующих условий: − размеры тела много меньше всех рассматриваемых в задаче расстояний; − расстояние от тела до поверхности Земли много меньше радиуса Земли; − высота и дальность полета тела являются небольшими (~10-20 м); − невысокая начальная скорость движения тела (~10 м/с). При увеличении начального значения скорости необходимо строить новую модель движения тела с учетом силы трения, а при скоростях близких к первой космической скорости – модель движения тела под действием центральных сил.