ЛЕКЦИЯ №4 ШАГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ Дискретный разомкнутый
реклама

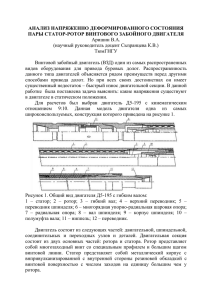
ЛЕКЦИЯ №4 ШАГОВЫЕ ЭЛЕКТРОДВИГАТЕЛИ Дискретный разомкнутый электродвигателем является электропривод с синхронно-импульсным шаговым следящим электроприводом, сочетающим в себе возможности глубокого частотного, регулирования скорости с возможностями числового задания пути и надежной фиксации конечных координат. Шаговые электродвигатели (ШД) работают в комплекте с электронными коммутаторами, коммутатора состоит в переключении обмоток управления ШД с последовательностью и частотой, соответствующими заданной команде. При этом результирующий угол поворота ротора ШД строго соответствует числу переключений обмоток управления, направление вращения - порядку переключений, а частота вращения - частоте переключений. Дискретный шаговый привод очень хорошо сочетается с цифровыми управляющими машинами и программными устройствами. ШД находят применение там, где исполнительные органы устройств должны совершать строго дозированные перемет с фиксацией своего положения в конце движения. Развитие систем ЧПУ создало широкие возможности да применения ШД для преобразования унитарного кода (последовательность импульсов) в пропорциональное перемещение механизма. Системы автоматического управления с ШД можно разделить на две группы: - системы, в которых ШД преобразует унитарный код в фазомодулированный сигнал, например, устройства, в которых ШД вращает задающие сельсины, поворотные трансформаторы и т.д.; - системы, в которых ШД использованы для привода исполнительного механизма непосредственно или через усилитель момента. К этим системам относятся приводы подач станков, индексирующие устройства счетчиков. Ряд исследователей считают, что применение шаговых электродвигателей в электроприводах роботов ограничено трудностью обеспечения плавности движения схвата манипулятора и требуемых динамических характеристик. Однако, освоение методов старт-стопного Шаговые электродвигатели 1 управления, электрического дробления шага и новых алгоритмов точного формирования движения Современные шаговые изменили двигатели взгляды на возможности являются по сути ШД. синхронными двигателями без пусковой обмотки на роторе, что объясняется не асинхронным а частотным пуском шагового двигателя. Преимущества шагового двигателя: угол поворота ротора определяется числом импульсов, которые поданы на двигатель; двигатель обеспечивает полный момент в режиме остановки (если обмотки запитаны); прецизионное позиционирование и повторяемость. Хорошие шаговые двигатели имеют точность от 3 до 5% от величины шага. Эта ошибка не накапливается от шага к шагу; возможность быстрого старта/остановки/реверсирования; отсутствием щеток, срок высокая службы надежность, шагового связанная двигателя с фактически определяется сроком службы подшипников; однозначная зависимость положения от входных импульсов обеспечивает позиционирование без обратной связи; возможность получения очень низких скоростей вращения для нагрузки, присоединенной непосредственно к валу двигателя без промежуточного редуктора; может быть перекрыт довольно большой диапазон скоростей, скорость пропорциональна частоте входных импульсов. Недостатки шагового двигателя: шаговым двигателем присуще явление резонанса - возможна потеря контроля положения ввиду работы без обратной связи; потребление энергии не уменьшается даже без нагрузки; затруднена работа на высоких скоростях; невысокая удельная мощность; относительно сложная схема управления. Шаговые электродвигатели используются для приводов подачи фрезерных станков, токарных станков, в лентопротяжных механизмах, в электрогидравлических приводах роботов для вращения распределителя гидродвигателя, для управления положением штоков, затворов, сервоклапанов, дозаторов, вентилей, клапанов, заслонок, для дистанционного управления переключателями, приборами. Все Шаговые электродвигатели телеметрическими специфические особенности и ШД индикаторными обусловлены 2 исключительно импульсным характером сигнала, а не его конструктивной схемой. Шаговые электродвигатели различаются по числу фаз, типу магнитной системы, способу возбуждения (управления), числу полюсов ротора. ШД обычно являются многофазными, многополюсными. Наибольшее распространение получили трех- и четырехфазные машины с числом пар полюсов р = 4…6. В зависимости от типа источника и устройства электронного коммутатора могут применяться следующие виды управления: - потенциальное или импульсное; - однополярное или разнополярное; - симметричное или несимметричное. При потенциальном управлении обмотки находятся под напряжением и по фазе течет ток до ее переключения, положение ротора фиксируется полем возбуждения обмоток. При импульсном управлении фаза включается на некоторое время, а затем отключается автоматически и двигатель часть каждого такта обесточен. Ротор ШД удерживается в заданном положении реактивным моментом или внешним фиксирующим устройством. Шаговые электродвигатели могут быть с активным или пассивным ротором. Активный ротор - это ротор с постоянными магнитами. Простейшим является однофазный ШД с клювообразными полюсами и фиксацией ротора постоянными магнитами, рис. 1. Пока обмотка ОВ обесточена, ротор ориентирован по оси полюсов Рис. 1 напряжения она создает из постоянных магнитов. При подаче на магнитный обмотку поток ОВ примерно постоянного в два раза превышающий поток постоянных магнитов и ротор, имеющий полюсные выступы, поворачивается против часовой стрелки на угол 90°. При снятии напряжения управления с обмотки ОВ ротор утягивается постоянными Шаговые электродвигатели 3 магнитами и поворачивается еще на один шаг (90°). Двигатели указанного типа могут отрабатывать сигналы с частотой до 300Гц. Недостаток таких ШД - невозможность реверса. Простейшим реверсивным ШД является двухфазный двухполюсный двигатель, рис. 2. Пусть в исходном положении напряжение подано на фазу В и ротор ориентирован по оси этой фазы. Если снять напряжение с фазы В и подать напряжение на фазу А рис. 2,б, то ротор повернется на угол 90° и будет ориентирован по оси фазы А. Однако, остается неопределенным направление вращения ротора: ротор может повернуться как по часовой стрелке, так и против. Этого недостатка лишены трехфазные ШД. Для однозначности направления вращения используется предварительное включение очередной фазы до момента отключения Рис. 2 отработавшей фазы, рис. 2,в (симметричное управление) и рис. 2,г (несимметричное управление). Управление называют симметричным, если возбуждается одинаковое число обмоток, т.е. обмотки включаются парами. Если в последовательных тактах коммутации возбуждено разное число обмоток (например, две - одна - две …), то управление называется несимметричным. На рис. 2 показаны диаграммы при потенциальном Шаговые электродвигатели 4 управлении напряжением обмоток ШД, когда напряжение изменяется только при поступлении управляющих импульсов на переключение фаз. При импульсном управлении напряжением обмоток длительность импульсов напряжения меньше длительности периода поступления управляющих импульсов, то есть ШД часть времени каждого такта обесточен. В этом случае для исключения потерь информации в период пауз между импульсами тока фаз необходимо фиксировать ротор ШД внутренним реактивным моментом либо внешними фиксирующими устройствами. Диаграммы рис. 2 соответствуют разнополярному управлению напряжением на каждой фазе. Однополярное управление напряжением применяется при параллельном включении фаз, рис. 4. Угол поворота вала ШД определяется по следующей формуле α π p n , п где рп - число пар полюсов, m - число фаз ШД (число обмоток управления, пространственно смещенных одна относительно другой), n число тактов в цикле, причем, n=m для симметричной коммутации и n=2m для несимметричной коммутации. Для симметричной разнополярной коммутации n = 2m. Связь между необходимым числом тактов коммутации ШД и допустимой величиной момента нагрузки π Мст Мсин.макс cos , n где Мсин.макс - максимальное значение момента синхронизации (вращающего момента). Магнитоэлектрические ШД выполняют с шагом порядка 9…15°. Для повышения точности отработки заданного перемещения применяется электрическое дробление шага. Параметрический шаговый электродвигатель. Электродвигатели на меньший шаг (1…3°) выполняют параметрическими с электрической Шаговые электродвигатели 5 редукцией шага. Эскиз конструкции параметрического ШД представлен на рис. 3. Статор и ротор ШД набирают из листов электротехнической стали. Статор представленного ШД имеет восемь фазных выступов Рис. 3 (m=4), в которых по расточке статора выштампованы пазы с общим числом зубцовых делений по окружности Nc=28. Ротор из магнитомягкого материала имеет равномерно по окружности зубцы, число которых отличается от Nc на два: Zp=30. При поочередном включении фаз статора поле статора каждый раз поворачивается на угол 45°, а ротор на угол 3°. Коэффициент электрической редукции kэр = Zp/2. При равномерном вращении поля статора в этом же отношении снижается частота вращения ротора ШД. Рис. 4. Силовые схемы шагового электропривода. Силовая схема питания фаз ШД при однополярном управлении и параллельном включении фаз с транзисторными ключами представлена на рис. 4. Схема питания фаз с помощью тиристорного коммутатора с искусственной коммутацией представлена на рис. 5. Шаговые электродвигатели 6 Рис. 5 Тиристоры Т1…Т4 обеспечивают парную коммутацию обмоток ЩД, при которой в каждый момент времени включены две фазы из четырех. Тиристоры Т1 и ТЗ, а также, Т2 и Т4 образуют схемы двух триггеров, в которых переключение тиристоров производится с помощью колебательных контуров Lк Ск и диодов VD1 - VDЗ. Предположим, что тиристор Т1 открыт и запитана обмотка управления ОУ1.Конденсатор Ск заряжен до напряжения источника питания с плюсом на правой обкладке. Когда поступит управляющий импульс на тиристор ТЗ, он откроется и по обмотке управления ОУЗ начнет протекать ток. В то же время по цепи + Ск - Lк - ТЗ Т1 - - Ск происходит быстрый перезаряд конденсатора и при смене знака тока через тиристор Т1 последний закроется. К концу перезаряда конденсатора плюсовой станет его левая обкладка. Схема готова к новому шагу управления - отключению ОУЗ и включению ОУ1. Аналогично работает второй триггер на тиристорах Т2 - Т4. Отработка единичного шага Рассмотрим процесс отработки ШД единичного состоянии шага. ротор Пусть ЩД в исходном находится в положении, показанном на рис.6. Рис 6 Шаговые электродвигатели Снимаем напряжение управления с фазы 1 и подаем напряжение на фазу 2. 7 Возникает вращающий момент (момент синхронизации), под действием которого ротор начинает вращаться в положительном направлении к фазе 2. Величина момента синхронизации определяется углом рассогласования θ между продольной осью ротора и осью поля (фазных выступов) статора M Mсин.max sinθ . (1) Рис. 7 Угол α, отсчитываемый от оси фазного выступа 1 до оси ротора, начинает расти, рис 7. Появляется динамический момент d Mдин J Σ 2Ω dt . (2) По мере приближения оси ротора к оси фазы 2 величина момента вращения уменьшается и в момент совпадения осей (момент времени t1) становится равной нулю. Угол поворота ротора равен α1 Однако в этот момент времени (t1) динамический момент достигает максимума и под его действием ротор проходит равновесное состояние и угол α становится больше α1. Появляется тормозной момент, стремящийся повернуть ротор в сторону фазного выступа 2. Ротор тормозится, динамический момент падает до нуля, угол достигает значения α2 (момент времени t2). Начинается движение ротора в обратную сторону. В момент Шаговые электродвигатели 8 времени t3 ротор находится в соосном положении с выступом фазы 2, однако, под действием динамического момента он по инерции проходит это положение и движется к фазному выступу 1. Если бы не было сил демпфирующих колебания и трения, то ротор вернулся бы в исходное положение. При наличии сил трения и электромагнитного демпфирования ротор отклоняется только до угла α3 (момент времени t4). Первый цикл колебаний ротора закончился. В исходном состоянии для второго цикла ротор неподвижен, динамический момент равен нулю, на ротор действует вращающий момент по направлению к фазе 2, но величина его меньше, чем в начале первого цикла. Таким образом, процесс колебаний ротора продолжается до полного преобразования кинетической энергии ротора в потери. Внутреннее электромагнитное демпфирование колебаний ротора происходит за счет демпфирующего момента возникающего при протекании по обмоткам управления токов, вызванных ЭДС вращения. ЭДС вращения наводится переменной составляющей потока возбуждения, возникающей в результате изменения магнитного сопротивления при вращении ротора. Демпфирующий момент препятствует нарастанию угловой скорости ротора. Расчет демпфирующего момента: Mдмп D где D ψ2m r dθ , dt - коэффициент внутреннего демпфирования, ψm - амплитуда изменения потокосцепления ротора с фазой статора в функции углового положения ротора, r- активное сопротивление фазы статора. Таким образом, уравнение движения ротора можно представить в виде Mmax sin m1 θ D dθ dΩ . Mст J Σ dt dt (4) Этим уравнением можно пользоваться при рассмотрении механических переходных процессов, когда электромагнитными процессами в обмотках статора пренебрегают. Шаговые электродвигатели 9 Из диаграммы колебаний ротора (рис. 7) можно определить ряд параметров переходного режима: . Т0 - период собственных колебаний. Собственная угловая частота колебаний ротора ШД: Ω0 = 2π/Т0, собственная частота колебаний: f0=1/Т0; - N - число колебаний ротора; - tp - время окончания переходного процесса. Колебания ротора - основной недостаток шагового привода, ограничивающий его применение или существенно удорожающий привод из за борьбы с ними. В тех случаях, когда качания ротора недопустимы, применяют старт-стопный режим управления при отработке единичных шагов. Старт-стопное управление. Старт-стопным называется такое управление ШД, при котором обеспечивается минимальная динамическая ошибка за счет использования избытка кинетической энергии ротора. Необходимо, чтобы энергия, запасенная ротором при разгоне, была полностью израсходована в процессе торможения. Торможение может быть естественным или принудительным. Рассмотрим старт-стопное управление с естественным торможением, см. диаграммы рис. 8,а. Рис. 8,а Шаговые электродвигатели Рис. 8,6 10 При движении ротора ШД от фазы 1 к фазе 2 в момент времени t1; когда ротор находится в положении близком к углу α1, снимается напряжение управления с фазы 2 и ротор ШД далее движется по инерции. Момент времени t1 подбирается так, чтобы запаса кинетической энергии (величины динамического момента) хватило для окончания движения ротора ШД в соосное с фазой 2 положение. В момент времени t2,когда угол α=α1, вновь подается питание на фазу 2 для удержания ротора в равновесном относительно оси этой фазы положении. Для сокращения времени регулирования, а также в случаях, когда естественное торможение не может ликвидировать качания ротора, применяют принудительное торможение. В момент времени t1, когда ротор находится в положении близком к углу α1, снимается напряжение управления с фазы 2 и вновь подается на фазу 1, создающую тормозной момент, рис. 8,6. Ротор резко тормозится. Когда ротор достигает симметричного положения относительно фазы 2, отключают тормозящую фазу 1 и вновь подключают фазу 2 для удержания ротора в положении равновесия. Режимы работы шагового электродвигателя В зависимости от частоты подачи импульсов управления различают следующие режимы работы ШД: - статический - по одной из фаз протекает постоянный ток, создающий неподвижное в пространстве магнитное поле. Ротор ШД ориентирован по оси этой фазы и неподвижен; - квазистатический - на фазы последовательно подаются импульсы напряжения управления, причем ротор успевает повернуться и остановиться к моменту подачи следующего импульса; - установившийся - ротор ШД непрерывно вращается со скоростью, соответствующей частоте подачи импульсов управления; Шаговые электродвигатели 11 - переходный - имеет место при пуске ШД, реверсе, торможении, переходе с одной частоты вращения на другую. Переходные режимы ШД сложны и определяются величинами электромагнитной и механической постоянных времени. Картина движения ротора ШД в квазистатическом режиме представлена на рис. 9. Основными показателями квазистатического режима являются: перерегулирование ∆θп, Рис 9 то есть максимальное отклонение от нового положения устойчивого равновесия ротора при переходном процессе, tзат - время затухания свободных колебаний ротора на одном шаге, Ω0 собственная частота колебаний ротора. Переходные процессы в шаговом электродвигателе описываются системой дифференциальных уравнений: U1 r1 I1 d ψ1 dt Ω ψm1 , …………………………… U k r k Ik d ψk dt (5) Ω ψmk , Mmax sin m1 θ Mст J Σ dΩ , dt где Uk - напряжения последовательно включаемых фаз; rk . омические сопротивления фаз; Ik - токи фаз; ψk - потокосцепления само- и взаимоиндукции фаз; Мmax максимальное значение момента вращения; θ угол рассогласования осей ротора и поля фазы статора ШД; m1 - число фаз, Mст - статический момент сопротивления, ψmk - амплитуда изменения Шаговые электродвигатели 12 потокосцепления ротора с фазой статора в функции углового положения ротора. В отличие от (4) момент внутреннего демпфирования не вводится непосредственно в уравнение равновесия моментов, а его действие учитывается через влияние ЭДС вращения на токи фаз. Установившийся режим работы ЩД. При работе в установившемся режиме переключение напряжения фаз осуществляется при вращающемся роторе. При работе в установившемся режиме желательно, чтобы момент переключения фаз соответствовал достижению ротором оси включенной фазы (момент времени t1), когда момент вращения равен нулю, а динамический момент максимален, рис. 7. В этом случае наиболее полно используется энергия источника питания. Частота переключения фаз при этом f=T0/4=4∙f0. Максимальное рассогласование магнитных осей статора и ротора не превосходит одного полюсного деления. Движение ротора становится синхронным, без колебаний ротора. При частоте управляющих импульсов f=2∙f0 каждая последующая команда не вносит дополнительной энергии в систему, так как к моменту поступления очередной команды ротор ШД, находится в состоянии устойчивого равновесия. Такой режим работы ШД обеспечивает наименьшую динамическую погрешность привода. Поэтому эту частоту можно назвать оптимальной частотой для слабо нагруженных ШД. Устойчивость работы ШД во многом зависит от соотношения между частотой управляющих импульсов fy и частотой свободных колебаний ротора f0. При fy=4∙f0 наблюдается синхронное вращение ротора, при f0<fy<4∙f0 вращение ротора сопровождается вынужденными колебаниями с частотой fy, амплитуда которых снижается с увеличением частоты управления. Шаговые электродвигатели 13 При резонансной частоте управляющих импульсов fy=f0 возникает резонанс и наблюдается быстрое возрастание амплитуды качаний ротора, которое может привести к нарушению периодичности движения ротора выпадению из синхронизма. При fy<f0 каждый шаг ротора сопровождается свободными колебаниями. Частота управляющих импульсов fy однозначно определяет частоту вращения ротора ШД Ω α f у рад/с. Рис. 10 Статические механические характеристики ШД представлены на рис. 10. Ограничение рабочей зоны механических характеристик с увеличением частоты следования управляющих импульсов обусловлено следующим. С увеличением частоты происходит уменьшение вращающего момента ШД, что объясняется в основном двумя факторами: действием демпфирующего момента от ЭДС вращения и тем, что ЭДС самоиндукции в обмотках управления становится соизмеримой с напряжением источника питания и ток обмоток управления за время такта не успевает нарасти до установившегося значения, что снижает результирующий поток фаз обмотки статора. Снижение синхронизирующего момента тем больше, чем выше значение электромагнитной постоянной времени обмоток управления. Максимальную частоту импульсов, при которой еще возможен режим без выпадения ротора из синхронизма (потери шагов), называют частотой приемистости fnp. Предельные динамические характеристики ШД представляют собой зависимости частоты приемистости от момента сопротивления и момента инерции на валу двигателя, рис. 11. Шаговые электродвигатели 14 Если цель состоит в том, чтобы обеспечить работу ротора в возможно более широком диапазоне скоростей и частот, то следует выбирать меньшие значения момента нагрузки. При средних значениях параметров можно рекомендовать для нагрузки типа сухого трения момент (0,2…0,4)∙Мm. При работе на активную нагрузку момент нагрузки не следует принимать более 0,2∙Мm. Рис. 11. а) характеристики ШД 2-3, б) характеристики ШДА 3-3 При работе в установившемся режиме ШД может иметь достаточно высокий КПД, достигающий 50%. Пуск. При пуске ШД в ход наиболее легкие условия разгона имеют место при 2 f 0 f y 4 f 0 , то есть при положительном динамическом моменте. Торможение. Чтобы затормозить ротор нужно прекратить подачу управляющих импульсов, оставив одну фазу под током. Ротор колеблется около точки устойчивого равновесия. Процесс торможения может сопровождаться выбегом ротора, то есть потерей информации, так как ротор отрабатывает избыточное количество шагов. Для торможения без колебаний нужно плавно снижать fy, поддерживая М<0. Предельная частота импульсов при торможении и реверсе на 30…40% ниже, чем при пуске ШД. Реверс. При реверсировании шаговый электродвигатель может потерять несколько шагов. Реверс с потерей шагов имеет место в тех случаях, когда запасенная ротором энергия не успевает израсходоваться на преодоление внешних и внутренних сил сопротивления за время первых одного - двух тактов после подачи команды на реверс, когда ротор вращается Шаговые электродвигатели 15 против поля статора. Последнее зависит от положения ротора в момент начала реверса. Частота управляющих импульсов, при которой ШД после изменения направления движения магнитного поля на обратное реверсируется с сохранением устойчивости и без потери информации, называется частотой реверса. Силовые схемы ШД с форсированием переходных процессов Различие силовых схем для управления ШД определяется способом формирования процессов нарастания и спада тока в фазе. Возможны три способа форсирования переходных процессов. В первом способе на обмотки ШД подают повышенное напряжение, а для ограничения тока на допустимом уровне последовательно с обмоткой включают резистор. Этот способ применяется редко из-за низкого КПД. Во втором способе к обмотке в первые моменты времени прикладывается повышенное напряжение для форсировки нарастания тока. Особенностью большинства ШД является питание однополярными импульсами тока. Силовая схема для данного исполнения представлена на рис. 12. Регулирование напряжения на фазах ШД обеспечивается формированием процессов нарастания и спада тока в моменты Рис. 12 коммутации Управляющий фаз. сигнал поступает на вход распределителя импульсов и на одновибратор ОВ. Одновибратор формирует импульс длительностью tф отпирающий на это время ключ К4. Распределитель импульсов в соответствии с алгоритмом управления открывает один из транзисторов К1…КЗ. На фазу ШД, подключаемую к источнику питания, для форсированного нарастания тока фазы подается Шаговые электродвигатели 16 повышенное напряжение U1. Ток фазы нарастает до номинального значения. По окончании времени форсировки tф транзистор К4 закрывается и к обмотке ШД прикладывается напряжение U2, величина которого обеспечивает протекание номинального тока фазы. Диод VD1 предотвращает короткое замыкание источника U1 при включении К4. После снятия с ключа (К1…КЗ) управляющего напряжения соответствующая фаза отключается от источника питания. Запас электромагнитной энергии фазы рекуперируется через диоды и РЭ в источник питания. Для ускорения процесса отключения обмотки к ней может быть приложено обратное форсирующее напряжение. Временные диаграммы, иллюстрирующие процессы импульсного форсирования, представлены на рис. 12,б. Третий способ форсирования связан с подачей на обмотку форсированного напряжения постоянно и поддержанием заданного значения тока с помощью датчика тока. Наибольшее распространение получила стабилизация тока на заданном уровне с использованием широтноимпульсного регулятора (ШИР). Схема питания фазы и диаграмма тока и напряжения представлена на рис. 13. При получении сигнала, разрешающего включение фазы, открываются транзисторы VI и V4 и ток фазы нарастает до imax. Время нарастания Тн зависит от индуктивности фазы и напряжения источника питания. После того, как ток фазы достигает значения imax , ключ VI размыкается и ток фазы спадает по цепи VI - V4 - R до значения imin, после чего VI открывается и вновь ток фазы растет. Таким образом, в ШИР тока возникает автоколебательный процесс, в результате которого ток поддерживается постоянным. Шаговые электродвигатели 17 Рис. 13 Период переключения Тв зависит от постоянной времени фазы ШД и напряжения на фазе. Отключение фазы осуществляется размыканием ключей V1, V4. Разряд запасенной в индуктивности фазы энергии осуществляется за время Тс по цепи через вентили V2, V3 и источник энергии. Коэффициент полезного действия ШД при импульсном форсировании напряжения достигает 0,8. Электрическое дробление шага. Заложенная в конструкцию ШД дискретность перемещений сдерживала применение этих двигателей при реализации равномерных медленных движений. Принцип электрического дробления шага, при сохранении основной структуры импульсного управления дискретным электроприводом, позволяет увеличить до любого требуемого значения число электрических состояний системы и обеспечить глубокое электрическое редуцирование шага и скорости движения, при этом устраняются вынужденные колебания ротора. Принцип электрического дробления шага осуществляется путем одновременного питания двух фаз, при этом ротор ШД устанавливается по оси суммарного потока двух фаз. В принципе число одновременно возбуждаемых смежных фаз не должно превышать m/2 при четном и (m+1)/2 при нечетном числе фаз. Метод электрического дробления шага сочетает шаговый принцип перемещения поля статора и фиксацию его в требуемом положении с плавным переходом ротора из одного пространственного положения в другое. Метод основан на Шаговые электродвигатели 18 введении дополнительной модуляции фазных токов внутри основного периода коммутации. При построении схем управления ШД с дроблением шага получили распространение два основных принципа: - двухчастотное управление, при котором в качестве импульсного модулятора используется распределитель импульсов; - управление с промежуточным преобразованием кода, вырабатываемого распределителем импульсов, в аналоговый управляющий сигнал, подаваемый на вход регуляторов напряжения. На рис. 14 приведена диаграмма формирования напряжений двух фаз ШД при двухчастотном управлении. От высокочастотного генератора напряжение подается на делители частоты, Рис. 14 которые заданием в соответствие с вырабатывают управляющие сигналы с частотой f1 и f2. Формирование фазных напряжений U1 и U2 осуществляется воздействием этих сигналов на входы электронного коммутатора, выполняющего функции электрического дифференциала и суммирующего эти два информационных потока. Меняя соотношение частот - регулируем скорость прохождения ротором двигателя единичного шага. При равенстве частот ротор неподвижен и фиксируется в любой точке в пределах выполняемого шага, положение которой зависит от фазового сдвига сигналов f1 и f2. Шаговые электродвигатели 19 Передаточная функция шагового электродвигателя Шаговый электродвигатель при движении на единичном шаге описывается как звено системы автоматического управления передаточной функцией Wp αp k шд , 2 Up 1 p Tэ 1 p Tвт p2 Tм (12.3) где U(p)- напряжение, подаваемое на фазу ШД; α(р) - угол поворота ротора; Тэ,Твт, Тм - постоянные времени: электромагнитная, демпфирования вязким трением, механическая; kшд - коэффициент передачи ШД по напряжению. Готовые шаговые модули Предлагаются шаговые модули так называемой MDrive серии. С помощью данных устройств Вы можете покрыть диапазон моментов начиная от 0,1 Нм и заканчивая 10,34 Нм. Шаговый модуль MDrive объединяет в одном корпусе и шаговый двигатель, и силовой привод. Подобная интеграция дает несколько преимуществ: отпадает необходимость в дополнительных кабелях, решается проблема наводок, резко сокращается место для монтажа. Все это приводит к снижению размер и стоимость Вашей системы позиционирования. Электроника, реализованная в шаговом модуле, настраивается по RS485 (SPI порты). Используя этот порт Вы можете задавать различные режимы работы привода: микроделения шага, менять ток удержания и движения. При этом отпадает необходимость во внешних навесных элементах и переключателях. MDrive может работать в двух режимах: микроделения шага и скоростном (скорость вращения шагового двигателя пропорциональна Шаговые электродвигатели 20 напряжению на входе). Возможно большое количество вариантом поставки, различных как по функциям, так и по аппаратным возможностям для каждого шагового модуля. Для работы в скоростном режиме в шаговый модуль имеет АЦП, с входной частотой до 100 кГц. Для традиционного шагового управления - шаг и направление – используются две цифровых линии (5В) с общей землей. Возможны варианты поставки шагового модуля с установленной ШВП (линейный актюатор), сквозным валом, с установленным оптическим энкодером или кнопкой старт/стоп. Возможна вариация длины выходного вала. И все это на основе одной базовой конструкции. Используя конфигурационную утилиту, Вы можете настроить 12 параметров скоростного управления, которые затем сохраняются в энергонезависимой памяти. Для управления шаговым двигателем используется либо униполярный, либо биполярный алгоритм. Шаговый модуль MDrive хорошо подходит для систем позиционирования, связанных с робототехникой, медициной, сборочным производством в радиоэлектронной промышленности, упаковкой, гравировкой, контролем и лазерной обработкой. Технические характеристики: - Питающее напряжение в диапазоне +12 - +48, или +24 - +75. - АЦП для управления скоростью вращения двигателя входным напряжением - Невысокая стоимость - Компактность - Возможны различные варианты (один вал, ШВП, сквозной вал, с установленным энкодером, с кнопкой старт/стоп для ручного позиционирования) - Возможна различная длинна выходного вала Шаговые электродвигатели 21 - Программно задаются настройки движения (ток удержания и движения, ускорение/торможение, начальная и максимальная скорость, режим микроделения шага до 256, два режима управления двигателем) Заключение В заключении, надо отметить, что шаговые модели MDrive серии очень дешевы, по причине интеграции двигателя и привода в едином корпусе, и ориентированны на OEM покупателей - конструкторов высокотехнологического оборудования. Их цена колебаться от 200$ при моменте 0,1 Нм до 970$ при моменте 10,34 Нм. Линейные шаговые электродвигатели Развитие дискретного электропривода привело к созданию специальных видов ЩД линейного типа. На базе цилиндрических ЩД созданы двухкоординатные линейно-поворотные ШД, производящие два независимых движения - вращательное и поступательное. Например, электродвигатели серии ДШЛ-8 и ДШЛ-9 обеспечивают шаг поворота в один градус и шаг поступательного перемещения от 0,00125 до 0,011м при полном перемещении до 0,05 м. Двигатели серии ДШЛ развивают моменты до 0,16 Нм и преодолевают усилия до 36 Н. Шаговые электродвигатели 22 Зависимость момента от скорости, влияние нагрузки Момент, создаваемый шаговым двигателем, зависит от скорости, тока в обмотках и схемы драйвера. На рис. 15а показана зависимость момента от угла поворота ротора. Рис. 15. Возникновение мертвых зон в результате действия трения. У идеального шагового двигателя эта зависимость синусоидальная. Точки S являются положениями равновесия ротора для ненагруженного двигателя и соответствуют нескольким последовательным шагам. Если к валу двигателя приложить внешний момент, меньший момента удержания, то угловое положение ротора изменится на некоторый угол Ф. Ф = (N/(2*pi))*sin(Ta/Th), где Ф – угловое смещение, N – количество шагов двигателя на оборот, Ta – внешний приложенный момент, Th – момент удержания. Угловое смещение Ф является ошибкой позиционирования нагруженного двигателя. Если к валу двигателя приложить момент, превышающий момент удержания, то под действием этого момента вал провернется. В таком режиме положение ротора является неконтролируемым. На практике всегда имеется приложенный к двигателю внешний момент, хотя бы потому, что двигателю приходится преодолевать трение. Силы трения могут быть разделены на две категории: статическое Шаговые электродвигатели 23 трение или трение покоя, для преодоления которого требуется постоянный момент и динамическое трение или вязкое трение, которое зависит от скорости. Рассмотрим статическое трение. Предположим, что для его преодоления требуется момент в половину от пикового. На рис. 15а штриховыми линиями показан момент трения. Таким образом, для вращения ротора остается только момент, лежащий на графике за пределами штриховых линий. Отсюда следуют два вывода: трение снижает момент на валу двигателя и появляются мертвые зоны вокруг каждого положения равновесия ротора (рис. 15б): d = 2 ( S / (pi/2) ) arcsin(T f /T h) = ( S / (pi/4) ) arcsin(T f / Th), где d – ширина мертвой зоны в радианах, S – угол шага в радианах, Tf – момент трения, Th – момент удержания. Мертвые зоны ограничивают точность позиционирования. Например, наличие статического трения в половину от пикового момента двигателя с шагом 90 град. вызовет наличие мертвых зон в 60 град. Это означает, что шаг двигателя может колебаться от 30 до 150 град., в зависимости от того, в какой точке мертвой зоны остановится ротор после очередного шага. Наличие мертвых зон является очень важным для микрошагового режима. Если, например, имеются мертвые зоны величиной d, то микрошаг величиной менее d вообще не сдвинет ротор с места. Поэтому для систем с использованием микрошагов очень важно минимизировать трение покоя. Когда двигатель работает под нагрузкой, всегда существует некоторый сдвиг между угловым положением ротора и ориентацией магнитного поля статора. Особенно неблагоприятной является ситуация, когда двигатель начинает торможение и момент нагрузки реверсируется. Нужно отметить, что запаздывание или опережение относится только к положению, но не к скорости. В любом случае, если синхронность работы двигателя не потеряна, это запаздывание или опережение не может превышать величины двух полных шагов. Это весьма приятный факт. Каждый раз, когда шаговый Шаговые электродвигатели 24 двигатель осуществляет шаг, ротор поворачивается на S радиан. При этом минимальный момент имеет в место, когда ротор находится ровно между соседними положениями равновесия (рис. 16). Рис. 16. Момент удержания и рабочий момент шагового двигателя. Этот момент называют рабочим моментом, он означает, какой наибольший момент может преодолевать двигатель при вращении с малой скоростью. При синусоидальной зависимости момента от угла поворота ротора, этот момент Tr = Th/(20.5). Если двигатель делает шаг с двумя запитанными обмотками, то рабочий момент равен моменту удержания для одной запитанной обмотки. Параметры привода на основе шагового двигателя сильно зависят от характеристик нагрузки. Кроме трения, реальная нагрузка обладает инерцией. Инерция препятствует изменению скорости. Инерционная нагрузка требует от двигателя больших моментов на разгоне и торможении, ограничивая таким образом максимальное ускорение. С другой стороны, увеличение инерционности нагрузки увеличивает стабильность скорости. Такой параметр шагового двигателя, как зависимость момента от скорости является важнейшим при выборе типа двигателя, выборе метода управления фазами и выборе схемы драйвера. При конструировании высокоскоростных драйверов шаговых двигателей нужно учитывать, что обмотки двигателя представляют собой индуктивность. Эта индуктивность определяет время нарастания и спада тока. Поэтому если к обмотке приложено напряжение прямоугольной формы, форма тока не будет прямоугольной. При низких скоростях (рис. 17а) время нарастания и спада тока не способно сильно повлиять на момент, однако на высоких скоростях Шаговые электродвигатели 25 момент падает. Связано это с тем, что на высоких скоростях ток в обмотках двигателя не успевает достигнуть номинального значения (рис. 17б). Рис. 17. Форма тока в обмотках двигателя на разных скоростях работы. Для того, чтобы момент падал как можно меньше, необходимо обеспечить высокую скорость нарастания тока в обмотках двигателя, что достигается применением специальных схем для их питания. Поведение момента при увеличении частоты коммутации фаз примерно таково: начиная с некоторой частоты среза момент монотонно падает. Обычно для шагового двигателя приводятся две кривые зависимости момента от скорости (рис. 18). Рис. 18. Зависимость момента от скорости. Внутренняя кривая (кривая старта, или pull-in curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен тронуться. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой старта или частотой приемистости. Она Шаговые электродвигатели 26 определяет максимальную скорость, на которой ненагруженный двигатель может тронуться. На практике эта величина лежит в пределах 200 – 500 полных шагов в секунду. Инерционность нагрузки сильно влияет на вид внутренней кривой. Большая инерционность соответствует меньшей области под кривой. Эта область называется областью старта. Внешняя кривая (кривая разгона, или pull-out curve) показывает, при каком максимальном моменте трения для данной скорости шаговый двигатель способен поддерживать вращение без пропуска шагов. Эта кривая пересекает ось скоростей в точке, называемой максимальной частотой разгона. Она показывает максимальную скорость для данного двигателя без нагрузки. При измерении максимальной скорости нужно иметь в виду, что из-за явления резонанса момент равен нулю еще и на резонансной частоте. Область, которая лежит между кривыми, называется областью разгона. Шаговые электродвигатели 27