Сплайн-интерполяция точечных облаков фрагментов
реклама

УДК 621:681.93.932
Полозков, Ю. В. Сплайн-интерполяция точечных облаков фрагментов поверхности в задачах рекурсивного формообразования / Ю. В. Полозков, А.
В. Масилевич, Д. Н. Свирский // Проблемы создания информационных
технологий : сб. науч. тр. / МАИТ. – Смоленск, 2004. – Вып. 10. – С. 226–
231.
Раскрывается сущность рекурсивных преобразований в процессе
формообразования нерегулярных объектов. Предлагается использовать
прогрессивный способ видеооцифровки нерегулярных поверхностей для
целей компьютерного моделирования в этом процессе. Описывается методика сплайн-интерполяции точечных облаков, полученных с помощью видеооцифровки нерегулярных объектов.
УДК 621:681.93.932
Ю. В. Полозков, А. В. Масилевич, Д. Н. Свирский
СПЛАЙН-ИНТЕРПОЛЯЦИЯ
ТОЧЕЧНЫХ ОБЛАКОВ ФРАГМЕНТОВ ПОВЕРХНОСТИ
В ЗАДАЧАХ РЕКУРСИВНОГО ФОРМООБРАЗОВАНИЯ
Процесс формообразования обеспечивает воплощение ментальных
образов человеческого воображения в искусственные (технические) объекты, необходимые для удовлетворения различных материальных и духовных потребностей общества. При этом наибольший спрос и конкурентоспособность имеет персонифицированная продукция, обладающая уникальными функционально-эстетическими свойствами, присущими конкретному потребителю. Так как вследствие персонификации возрастают
требования к потребительским свойствам, то в значительной мере усложняется геометрическая форма поверхностей объектов производства. Эффективность подготовки производства таких пространственно сложных
(нерегулярных) поверхностей во многом определяется человеческим фактором. Повышение эффективности этого этапа может быть обеспечено за
счет снижения степени человеческого участия при выполнении рутинных
процедур воплощения ментального замысла в цифровую трехмерную (виртуальную) модель будущего объекта производства посредством применения компьютерных технологий “обратного проектирования” (“Reverse Engineering”). В основе таких технологий трехмерного геометрического моделирования положен комбинаторный синтез геометрически трансформированных фрагментов ранее изготовленной продукции или ее элементов, в
том числе конкурирующих изделий, результатом которого является виртуальная модель нового нерегулярного объекта. Затем для физического воплощения, спроектированная модель преобразуется в сигналы, управляющие формообразующим инструментом. Наиболее эффективно материализация компьютерной модели осуществляется посредством применения автоматизированных систем “быстрого прототипирования” [1, 2]. Причем,
полученный объект физической реальности может снова выступать в качестве объекта-аналога в процессе компьютерного проектирования следующего объекта производства.
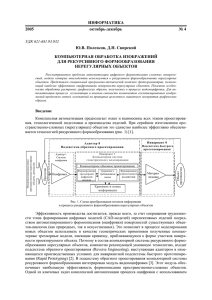
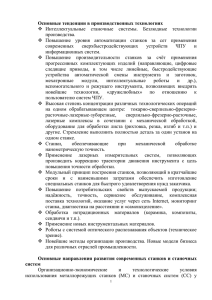
Таким образом, этапы “обратного проектирования” и “быстрого прототипирования” тесно взаимосвязаны в едином процессе формообразования, который в данном случае носит рекурсивный характер (рис 1).
Важным проявлением рекурсии при формировании новых искусственных форм в производстве является закрепление положительного содержания прототипов, сопровождающееся, как правило, появлением новых
функциональных элементов, связей, отношений, что также объективно ведет к усложнению формы технических объектов. При этом оперативность
и качество реализации последующих этапов и процедур, как и качество
самого результата, получаемого в процессе формообразования, во многом
определяются успешным проведением предыдущих.
Рис. 1. Схема рекурсивного формообразования нерегулярных объектов
Поэтому в процессе формообразования наибольшую значимость имеет информационное описание (оцифровка) поверхности нерегулярного
объекта, выбранного в качестве аналога на этапе компьютерного проектирования. Большинство существующих систем оцифровки характеризуются
громоздкостью технического исполнения, высокой стоимостью и повышенными требованиями к квалификации обслуживающего персонала, что
делает их малодоступными для большинства предприятий малого и среднего бизнеса. Для повышения эффективности процесса оцифровки нерегулярных поверхностей была разработана компактная автоматизированная
система симультанной видеооцифровки [3]. В состав ее конфигурации
входит видеокамера, проектор и поворотный стол. Указанная видеосистема позволяет формировать точечные трехмерные цифровые модели поверхностей нерегулярных объектов (рис.2) [4]. Такие точечные облака являются основой для построения непрерывных моделей поверхностей, обладающих достаточной наглядностью, и выступают в качестве базовых
элементов в конструкторско-технологической подготовке производства.
Рис. 2. Точечная трехмерная цифровая модель
фрагмента нерегулярного объекта
Для создания качественных непрерывных компьютерных моделей
оцифрованных нерегулярных объектов была разработана методика сплайнинтерполяции точечных моделей фрагментов поверхности. Согласно этой
методики в качестве исходных данных используется множество точек
TG = {Tj: j = 1, 2, …, U}, полученное на стадии трехмерного преобразования векторизованных изображений участков поверхности, освещенных лучом проектора в процессе видеооцифровки. Каждое подмножество Tj описывает фрагмент поверхности, регулярную трёхмерную модель которой
необходимо получить.
Подмножество, описывающее фрагмент поверхности, в свою очередь,
представляется в виде:
m
T j Tknk ,
(1)
k 1
где каждое подмножество содержит непересекающуюся цепочку точек.
Верхний индекс здесь и далее для множеств обозначает количество элементов (мощность) множества.
Для создания интерполяционной поверхности на регулярной сетке для
nk
каждого фрагмента точки в цепочках Tk могут быть заданы с достаточно большим шагом. Это может являться технологическим преимуществом
по сравнению с методами, требующими для создания регулярной модели
задания плотного облака точек [5].
Создание интерполяционной поверхности осуществляется в два этапа.
На первом этапе производится интерполяция каждой цепочки точек фрагмента в отдельности. Это позволяет рассчитать точки, по которым необходимо провести интерполяцию поверхности, задавая их на регулярной сетке. На втором этапе производится собственно создание интерполирующей
поверхность функции.
Для единообразного представления цепочки точек некоторой пространственной кривой используется V-сплайн интерполяция, где V-сплайн
является вектор-сплайном одной переменной:
V (t ) V1 p b p3
b1x b1 y
b2 x b 2 y
V1n (t ) V2n (t ) ... V pn (t )
b b
px py
b1z
b2 z
b pz
V(t ) Vx (t ) e x V y (t ) e y Vz (t ) e z ,
где n – порядок сплайна; bp3 – матрица некоторых постоянных коэффициентов; p – размерность пространства каждого из сплайнов Vx,y,z (t):
p = n + N – 1,
nk
где N – число точек цепочки из Tk : N nk.
В качестве базисных функций Vi n(t) используются нормализованные
B-сплайны, заданные на сетке
: t-n+1 < …< 0 = t1 < …< ti < …< tN = 1 < …< tN+n.
В [6] доказано, что всякий сплайн, принадлежащий классу n – 1 раз
непрерывно дифференцируемых функций, может быть представлен в виде
линейной комбинации B-сплайн функций. В данном случае предполагается, что именно такому классу функций принадлежит интерполяционный
сплайн.
Нормализованная B-сплайн функция может быть вычислена по следующей рекуррентной формуле:
Vi n (t ) Bin (t )
t ti
t
t n1
Bin1 (t ) i n1
Bi 1 (t ),
tin ti
t i n1 ti 1
1, x [ti , ti 1 ),
Bi0 (t )
0, x [ti , ti 1 ),
где i=-n+1,…,N-1.
Для пространственно сложных поверхностей полагается n = 3. Тогда
для определения коэффициентов bp+13 кубического V-сплайна, помимо
условий интерполяции:
V ( ti ) Ti Tknk ,
(2)
вводится дополнительное краевое условие (значение производных на концах интерполируемого отрезка):
V (0) = T 0; V(1) = T 1.
(3)
Производные определяются приближённо как вектора, соединяющие
две крайние точки:
T 0=T2 - T1; T 1=TN - TN-1.
(4)
В итоге, неизвестные коэффициенты определяются из системы линейных уравнений (2, 3). Матрица этой системы может быть приведена к
трёхдиагональному виду, в результате чего система решается методом
прогонки для каждой проекции.
На следующем этапе интерполяции определяется кубический Wсплайн (описание фрагмента Tj поверхности):
W( g , t ) W x ( g , t ) e x W y ( g , t ) e y W z ( g , t ) e z ,
который так же строится на B-сплайнах:
Wx, y , z ( g , t ) B1( N 2) b ( N 2)( M 2) B1Т( M 2) ,
где B1(N+2) = (B 30(g), …, B 3N+1(g)), B1( M 2) = (B 30(t), …, B 3M+1(t));
N max (nk ) , M = m – количество цепочек точек фрагмента.
k [1, m]
Для получения значений коэффициентов b(N+2)(M+2) по каждой проекции создаётся таблица, содержащая (N+2) строк и (M+2) столбцов, в которую заносятся вектора узловых точек и производных на границе фрагмента. Узловые точки вычисляются с равным шагом (t = 1/(N - 1)) на интерполяционных кривых, полученных на предыдущем этапе. Производные
вычисляются по крайним узловым точкам по аналогии с (4).
Далее определяются коэффициенты кубических сплайнов V(g) по
1
2
3
строкам таблицы. Полученные вектор-коэффициенты ν i j (vi j , vi j , vi j )
заносятся в новую таблицу. Коэффициенты матрицы b(N+2)(M+2) определяются при вычислении интерполяционных кубических сплайнов V(t) по
столбцам новой таблицы. Здесь вектор-коэффициенты имеют вид:
b i j (bixj , biyj , bizj ) .
В результате интерполяции всех U множеств Tj получается набор
фрагментов поверхностей (рис. 3) (в одной системе координат), перекры-
вающихся на границах, объединение которых позволяет получить трехмерную модель всей поверхности идентифицируемого нерегулярного объекта.
Рис. 3. Интерполированный фрагмент поверхности
нерегулярного объекта
Разработанная компактная система видеооцифровки и представленная
методика формирования трехмерных непрерывных моделей поверхностей
позволит эффективно автоматизировать этап подготовки производства и
осуществить его техническую взаимосвязь с этапом физического изготовления изделий, реализуемую качественно новым технологическим объектом – компьютерной технологией рекурсивного формообразования нерегулярных объектов.
Литература
1. Козинец Д. Г., Свирский Д. Н. Выбор базового физико-технического
эффекта для компактной системы быстрого прототипирования. // Материалы. Технологии. Инструменты, №2, 2000, с.
2. Hopkinson N., Dickens P. Rapid prototyping for direct manufacture // Rapid
Prototyping Journal. Vol. 7, № 4, 2001, pp. 197 - 202.
3. D. Svirsky and Y. Polozkov, The industrial application of the irregular 3Dobjects image processing in the compact reverse engineering system. Lecture
Notes in Computer Science 2124, Springer, Berlin, 2001, pp. 457 – 464,
4. Свирский Д. Н., Полозков Ю. В. Создание трехмерных цифровых моделей нерегулярных объектов по их видеоизображениям.//Сборник научн.
статей ИТК НАН Беларуси, вып.5, Мн.: ИТК НАН Беларуси-2001. с.33–38.
5. Lasers and image encoder speed 3D measurements // Machine Design, № 9,
1989, pp. 100.
6. Завьялов Ю. С., Квасов Б. И., Мирошниченко В. П. Методы сплайнфункций – М.: Наука, 1980. – 350 с.
Витебский государственный технологический университет
г. Витебск