docx
реклама

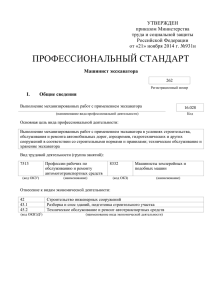
УДК 621.879:622.271-83+519.688 Корюков Александр Андреевич аспирант Уральский государственный горный университет г. Екатеринбург МОДЕЛИРОВАНИЕ РАБОЧЕГО ЦИКЛА КАРЬЕРНОГО ЭКСКАВАТОРА В MATLAB SHOVEL WORKING CYCLE SIMULATION WITH MATLAB Проведение экспериментов и наблюдений на действующем экскаваторе позволяют получить наиболее полное представление о процессах, происходящих во взаимосвязанных системах главных приводов экскаваторов, представляющих собой сложный электромеханический комплекс. Однако такой метод получения априорных данных связан с определенными трудностями. Популярность имитационного моделирования обусловлена, в первую очередь, его доступностью. Кроме того, оно позволяет получить данные для проектируемого, еще не существующего объекта. Модель экскаватора реализована на языке программирования MATLAB и предназначена для моделирования динамики электромеханического комплекса карьерного экскаватора при выполнении им рабочего цикла путем решения дифференциальных уравнений методами Рунге-Кутты. Переходные процессы очень сложны, поэтому при моделировании более одного цикла программа запускает параллельные вычисления [1] на заранее сконфигурированном вычислительном кластере [2]. Интегрирование дифференциальных уравнений проводится последовательно, поэтому технология кластерных вычислений используется именно для параллельных вычислений, когда каждая рабочая сессия MATLAB моделирует отдельный рабочий цикл. Параметры модели экскаватора хранятся в отдельном mat-файле данных. В файле содержатся геометрические параметры и массы элементов рабочего оборудования, параметры механических передач (коэффициенты полезного действия, передаточные числа, моменты инерции и т.п.), а также технологические параметры экскаватора (емкость ковша, максимальные и минимальные значения высоты и радиуса разгрузки, радиуса черпания на уровне стояния, высоты черпания и т.п.). Такой подход делает функцию более гибкой: пользователь может сам конфигурировать файл данных, таким образом получая исходные данные для моделирования. Файл параметров экскаватора должен находиться в директории пакета расширения либо необходимо указывать полный путь к файлу, даже если он находится в директории из списка поиска MATLAB. Это необходимо для передачи данных при параллельных вычислениях. 86 Параметры обстановки (координаты точек разгрузки, начала копания, верхней бровки забоя) представлены объектом типа «структура». Параметры генерируются случайным образом в зависимости от технических характеристик экскаватора, указанных в его файле данных. Физические свойства пород, определяющие сопротивление грунта копанию берутся из файла с характеристиками пород. Для возможности параллельных вычислений файл с характеристиками пород должен находиться либо в директории пакета расширения, либо в одной директории с файлом параметров экскаватора. Входными аргументами функции являются: имя файла данных (обязательно); категория пород по трудности экскавации согласно Единым нормам выработки на открытые горные работы (обязательно); количество моделируемых циклов (опционально, по умолчанию 1); интервал времени для вектора наблюдений (опционально, по умолчанию 0,1 с); имя кластера для вычислений (опционально, по умолчанию вычисления проводятся на локальной машине). Системы управления приводом (СУЭП) постоянно совершенствуются, при этом могут изменяться не только параметры, но и структура привода. В связи с этим работа СУЭП моделируется внешней функцией, вынесенной в отдельный m-файл, что позволяет рассматривать один тип экскаватора с разными системами управления электроприводом. Привязка системы управления к экскаватору осуществляется путем задания имени функции моделирования СУЭП в файле данных экскаватора. Интегрирование дифференциальных уравнений в MATLAB осуществляется решателями ode. При этом решатель ссылается на функцию расчета правых частей дифференциальных уравнений, которой передается вектор состояния, и из которой возвращается вектор производных [3]. В данном случае вектор состояния содержит более двадцати переменных, поэтому во избежание путаницы вектор переменных и вектор производных передаётся между функциями целиком. Для координации взаимодействия функций вместе с вектором передается структура индексов, которая составляется функциями, входящими в состав программы на этапе инициализации. Имена полей структуры позволяют идентифицировать переменную в векторе состояний, а сами поля содержит индексы, позволяющие обращаться к соответствующему элементу вектора. 87 Моделирование рабочего цикла начинается с момента, когда ковш находится в точке выгрузки и проводится в четыре этапа: поворот в забой, черпание, поворот на выгрузку и выгрузка. Начальными условиями последующего этапа являются значения переменных, полученные в момент выполнения условия окончания предыдущего этапа. При повороте в забой регулируется положение зуба ковша, который в конце процесса должен оказаться в точке начала копания. Во время черпания регулируется толщина стружки, значение которой для обеспечения наибольшей производительности должно находиться в диапазоне, указанном в файле параметров экскаватора на основании паспортных данных машины. Процесс копания считается законченным, если ковш заполнен, если достигнута максимально допустимое значение массы грунта в ковше, достигнута максимальная высота черпания, либо зуб находится выше верхней бровки забоя. При повороте на выгрузку и выгрузке регулируется положение центра масс ковша, чтобы он находился в точке выгрузки. При моделировании решается следующие задачи: определение положения рабочего оборудования с использованием инструментов искусственного интеллекта; вычисление усилий в механизмах главных приводов (обратная задача по отношению к определению мессы породы в ковше [4]); позиционирования рабочего оборудования карьерного экскаватора. 𝐷 𝐴 𝐸 * 𝑂 𝐶 * 𝐵* * траектория зуба ковша; проекция траектории зуба ковша на горизонтальную плоскость; профиль забоя. Рис. 1. Траектория перемещения зуба ковша ЭКГ-18. 88 В модели учтены нелинейности, обусловленные изменением точки схода подъемного каната с головных блоков и вращением следового подшипника относительно точки крепления на стреле. Также моделируется изменение моментов инерции главных приводов за счет изменения массы породы в ковше и изменение угла наклона поворотной платформы при вращении, обусловленное наклоном ходовой тележки. По окончании моделирования функция возвращает массив наблюдений вектора состояния со структурой индексов, вектор меток времени, наименования элементов рабочего цикла, соответствующие меткам времени, а также структуру параметров забоя. По результатам моделирования построена траектория зуба ковша ЭКГ-18 (рис. 1). Ось вращения поворотной платформы пересекается с горизонтальной плоскостью на уровне стояния экскаватора в точке O. Зуб экскаватора от транспортного сосуда (точка A) перемещается в точку начала копания (точка B), находящуюся на нижней бровке уступа. Копание завершается в точке C, не доходя до верхней бровки уступа (точка E) по условию наполнения ковша. После этого ковш возвращается к месту разгрузки (точка A), и по причине резкого снижения массы породы в ковше зуб перемещается в точку D. Траектория и время рабочего цикла, полученные посредством моделирования, соответствуют реальным, что позволяет говорить о состоятельности модели. Модель может быть скомпилирована в самостоятельное приложение средствами пакетов расширения MATLAB® Compiler™, MATLAB® Builder™ NE и MATLAB® Builder™ JA. Литература. 1. Parallel Computing Toolbox™ User’s Guide, The MathWorks Inc., 2008, 556 p. 2. MATLAB® Distributed Computing Server System Administrator’s Guide, The MathWorks Inc., 2008, 73 p. 3. MATLAB® Mathematics, The MathWorks Inc., 2012, 598 p. 4. Бабенко А.Г., Полузадов В.Н., Дружинин А.В. Измерение массы полезного груза, перемещаемого подъемно-транспорной машиной циклического действия // Изв. вузов. Горный журнал. - 1994. - №4. - С. 106114. Аннотация. В статье описывается структура модели одноковшового экскаватора в системе MATLAB, предназначенная для моделирования переходных процессов, происходящих в электромеханических системах карьерного экскаватора при выполнении им рабочего цикла. The simulation model of the shovel’s electromechanical systems has created by MATLAB. The model allows to simulate transient processes in electromechanical systems of shovel in working cycle of mining machine. 89 Ключевые слова. моделирование, имитационная модель, экскаватор, электромеханическая система, рабочий цикл simulation model, simulation, shovel, electromechanical system, working cycle 90