Наталья Снигирева Саратовский государственный технический университет имени Гагарина Ю.А., Саратов, Россия
реклама

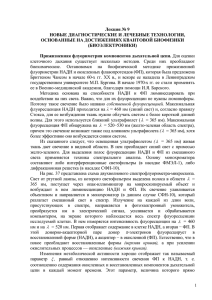
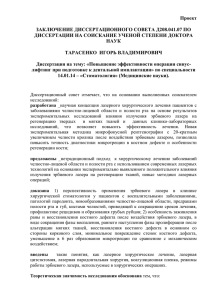
Наталья Снигирева Саратовский государственный технический университет имени Гагарина Ю.А., Саратов, Россия Методы измерения параметров шероховатости при помощи лазера Пётр Юрьевич Бочкарёв, доктор технический наук, профессор The main drawback of optical devices - a relatively high complexity of the measurement. This deficiency deprived roughness measurement methods using a laser. The most accurate and convenient methods of laser measurement method is the frequency shift of the radiation. Блок-схема лазерного профилографа с устройством сдвига частоты излучения, работа которого основана на изменении оптической длины измерительного плеча интерферометра с постоянной скоростью, показана на рис.1. Рис. 1. Блок-схема лазерного профилографа Выходное излучение лазера 5 после прохождения телескопической системы 4 направляется на сканирующее устройство, перемещающее сфокусированное излучение лазера вдоль измеряемой поверхности с постоянной скоростью vo. Сканирующее устройство состоит из кубика 3 с отражающей поверхностью и микрообъектива 2, позволяющего сфокусировать на измеряемой поверхности 1 лазерный пучок до 6 - 8 мкм. Отраженное от поверхности излучение приобретает доплеровский сдвиг частоты, пропорциональный вертикальной составляющей относительной скорости движения поверхности, которая определяется углом подъема освещенного элемента микропрофиля. После вторичного прохождения через сканирующее устройство и резонатор лазераотраженное излучение принимается фотоприемником 6. С выхода фотоприемника электрический сигнал после прохождения через амплитудный ограничитель 7 и узкополосный усилитель 8 поступает на частотный детектор 9.Выходной сигнал частотного детектора подается на интегрирующий усилитель 10, формирующий напряжение, пропорциональное мгновенному значению высот микронеровностей поверхности. Рис.2. Схема измерения параметров шероховатости методом последовательного преобразования фазы В лазерных профилографах применяют также метод последовательного преобразования фазы (рис. 2). Излучение лазера расщепляется на две части (1 и 2), которые фокусируются объективом 3 на исследуемую поверхность 4.Отраженные составляющие излучения снова собираются объективом и после фотоэлектронной обработки преобразуются в сигнал, пропорциональный разности длин оптических путей первого и второго луча. При движении исследуемой поверхности по координате х (или лучей относительно поверхности) и постоянном расстоянии х o получаемый сигнал пропорционален скорости приращения координаты у. После интегрирования данного сигнала на выходе образуются сигналы, пропорциональные координате у профиля поверхности. Литература 1. Основы метрологии /Н.С.Пронкин- университетская книга, 2006