Пример отчёта по 2ой лабе
реклама

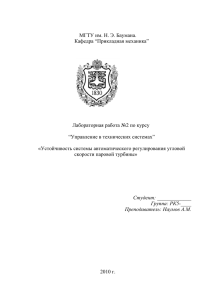
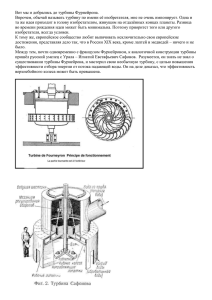
Цель работы – определение областей возможных значений двух параметров, обеспечивающих устойчивую работу САР угловой скорости паровой турбины, методом D-разбиения; экспериментальная проверка теоретических результатов с помощью компьютерного моделирования. Теоретическая часть Описание работы САР угловой скорости паровой турбины Функциональная схема (блок-схема) системы автоматического регулирования угловой скорости паровой турбины (Рис. 1.1.) показана на Рис. 1.2. Рис. 1.1. Система автоматического регулирования угловой скорости паровой турбины Нагрузка * Объект регулирования (паровая турбина) Связь вала турбины и регулятора Исполнительный механизм (задвижка) Рычаг Чувствительный элемент (центробежный регулятор) Рис. 1.2. Функциональная схема системы автоматического регулирования угловой скорости паровой турбины На Рис. 1.1. цифрами обозначены: 1. Турбина 2. Грузы 3. Рычаг 4. Задвижка 5. Муфта При отклонении угловой скорости * турбины (Рис. 1.1.) от заданного значения меняется центробежная сила грузов, в связи с чем изменяется положение муфты, которая рычагом приводит в действие исполнительный механизм – задвижку. Данная САР является системой прямого действия. 2 Краткий вывод дифференциальных уравнений звеньев рассматриваемой САР 1) Регулируемый объект (паровая турбина) Активный момент на валу турбины 1 v3 M Ä æy , 2 * (1.1) где æ – коэффициент, зависящий от конструкции паровой турбины, y – величина открытия задвижки, v – скорость движения пара. Линеаризуем зависимость (1.1) с помощью разложения в ряд Тейлора в окрестности стационарного режима движения ( y0 , v0 , *0 ) по степеням малых приращений y , * , отбрасывая члены разложения второго и более порядков малости и считая, что v const 1 v3 1 v3 y M Ä M Ä 0 æ 0 y æ 0 2 0 * , 2 *0 2 *0 (1.2) 1 v3 где M Ä 0 æ 0 y0 – установившийся активный момент. 2 *0 Уравнение (1.2) приведем к виду y M Ä M Ä 0 1 . y0 *0 (1.3) Момент сопротивления на валу турбины M Ñ M Ñ 0 M Ñ , (1.4) где M Ñ 0 – установившийся момент сопротивления на валу, M Ñ - момент от изменения нагрузки. Из теоремы об изменении момента количества движения системы получим уравнение паровой турбины Jï d* M Ä MÑ , dt (1.5) где J ï – приведенный к валу турбины момент инерции всех вращающихся масс. Подставляя в уравнение (1.5) зависимости (1.3) и (1.4) и учитывая то, что в установившемся режиме M Ä 0 M Ñ 0 , получим уравнение турбины в приращениях Jï y d* M Ä 0 1 M Ñ . dt y0 *0 (1.6) Номинальными значениями для турбины будут *0 , y0 , M Ä 0 M Ñ 0 M 0 . С учетом этого (1.6) примет вид d * M Ñ y J ï *0 *0 . M0 dt M0 *0 y0 (1.7) 3 Вводя следующие обозначения * *0 T0 , y M Ñ , f 0 , J ï *0 T0 , получим y0 M0 M0 d f0 dt (1.8) Уравнение (1.8) характеризует турбину как систему первого порядка с передаточной функцией W1 ( s) 1 , T0 s 1 (1.9) где T0 - постоянная времени, s - оператор Лапласа. 2) Чувствительный элемент (центробежный маятник) Центробежный маятник показан на Рис. 1.3. Рис. 1.3. Центробежный маятник На Рис. 1.3. цифрами обозначены 1. Вал 2. Демпфер 3. Муфта 4. Шары 5. Пружина Вал центробежного маятника вращается с угловой скоростью , пропорциональной угловой скорости машины. С такой же скоростью вращаются относительно оси x шары, обладающие массой m и занимающие определенное положение относительно оси x при постоянной скорости. При увеличении или уменьшении скорости шары расходятся или сближаются, вызывая перемещение муфты, кинематически связанной с шарами системой тяг. Для составления дифференциального уравнения центробежного маятника используется уравнение Лагранжа II рода d T T Q, dt q q (1.10) где q – обобщенная координата (в данном случае в качестве q выбирается выходная координата – перемещение муфты x ), T – кинетическая энергия, Q – обобщенная сила, которая в общем случае системы с одной степенью свободы имеет вид 4 Q Ï R F (t ) , q q (1.11) где Ï – потенциальная энергия системы, R - функция рассеяния энергии, F (t ) - внешняя сила, приложенная к динамической системе. Считается, что F (t ) 0 . Кинетическая энергия системы равна T T Tl Tx (1.12) где T – кинетическая энергия шаров во вращательном движении вокруг оси Ox , Tl – кинетическая энергия шаров во вращательном движении относительно точек A , Tx – кинетическая энергия масс в поступательном движении вдоль оси Ox . Указанные составляющие кинетической энергии 2m 2 2 l m 2 r x(4a x) ; 2 2a 2 T Tl 2ml 2 2 ml 2 x 2 ; 2 x(4a x) Tx Mx 2 , 2 где M – масса частей, участвующих в поступательном движении вдоль оси Ox . Потенциальная энергия системы Ï Ï 1Ï 2Ï (1.13) 3 где Ï 1 – потенциальная энергия масс, движущихся параллельно оси Ox , Ï потенциальная энергия шаров, Ï 3 – потенциальная энергия пружины. Указанные составляющие потенциальной энергии 2 – Ï 1 Mgx ; Ï 2 2mgl (1 cos ) mglx ; a cx 2 , Ï 1 F0 x 2 где c – коэффициент жесткости пружины, F0 сила предварительного поджатия пружины. Функция рассеяния энергии имеет вид 1 R x2 , 2 где – коэффициент вязкого трения. Подставив выражения (1.11) и (1.12) в уравнение (1.10), получаем нелинейное дифференциальное уравнение со стационарным режимом 0 const , x x0 const . Рассматривая малые колебания центробежного маятника относительно стационарного состояния, разложив нелинейные функции в ряд Тейлора в окрестности 0 , x0 , придем к линеаризованному уравнению колебаний маятника относительно стационарного 5 x , , после преобразований x0 *0 получим уравнение чувствительного элемента в нормализованной форме состояния 0 , x0 . Если ввести обозначения Tì2ô d 2 Tê d 1 , 2 ðåã dt ðåã dt ðåã (1.14) где Tì ô – постоянная времени муфты маятника, Tê – постоянная времени демпфера, ðåã – коэффициент статизма. Уравнение (1.14) характеризует центробежный маятник как звено второго порядка – колебательное звено, передаточная функция которого имеет вид 1 ðåã W2 ( s ) Tì2ô s 2 ðåã . Tê ðåã (1.15) s 1 В МВТУ-3.6 коэффициенты колебательного звена имеет иной вид W ( s) K , T s 2bTs 1 2 2 (1.16) где K – коэффициент усиления, T – постоянная времени, b – коэффициент относительного демпфирования. Связь между коэффициентами в (1.16) с коэффициентами в (1.15) следующая K T b 1 ðåã ; Tì ô ðåã ; Tê 2Tì ô ðåã (1.17) . 3) Исполнительный механизм (задвижка) Уравнение движения задвижки как безынерционного звена K* , где K* – передаточный коэффициент, (1.18) – безразмерное перемещение точки А (Рис. 0 1.1.), соответствующее стационарному режиму, – малое отклонение той же точки относительно 0 . 4) Другие элементы в цепи обратной связи Угловые скорости вала центробежного регулятора и вала турбины связаны между собой соотношением i* Или, разделив на *0 , 6 i , (1.19) где i – передаточное число связи вала турбины с валом регулятора. В рассматриваемой системе автоматического регулирования использована жесткая отрицательная обратная связь. Рассматривая рычаг 3 (Рис. 1.3.) как звено нулевого порядка, представим его уравнение в виде K . (1.20) Теоретический расчет областей устойчивости методом D-разбиения Считается, что в исследуемой САР при ее корректировке можно изменять значения K и Tì2ô . Пределы изменения параметров K и Tì2ô , при которых система автоматического регулирования угловой скорости паровой турбины остается устойчивой, можно получить с помощью метода D-разбиения в плоскости двух параметров: Tì2ô и K . Основываясь на функциональной схеме, структурная схема регулирования будет выглядеть следующим образом f0 ( s) f0 (s) W1 (s) ( s) 1 T0 s 1 K* i 1 K W2 ( s ) ðåã Tì2ô ðåã s2 Tê ðåã s 1 Рис. 1.4. Структурная схема регулирования Последовательно соединенные звенья в цепи обратной связи заменяются одним звеном с передаточной функцией W3 ( s) i W2 (s) K K* . Тогда передаточная функция системы регулирования имеет вид W (s) W1 ( s ) . 1 W1 ( s )W3 ( s ) (1.21) Отсюда следует характеристическое уравнение, соответствующее исследуемой САР, 1 W1 ( s)W3 ( s) 0 или T T s T 2 0 ìô 3 2 ìô T0Tê s 2 Tê T0 ðåã s ðåã iKK* 0 . (1.22) 7 Подставив в выражение (1.22) s j и разделив его на два уравнения, получим 2Tì2ô iK* K ðåã T0Tê 2 ; 3 2 T0 Tì ô Tê T0 ðåã . (1.23) 1 Tê ðåã ; 2 T0 T K ê T02 2 1 . iK*T (1.24) Откуда найдем Tì2ô Задавая значения в интервале (; ) по формулам (1.24) можно построить кривую D-разбиения в плоскости параметров Tì2ô и K . Каждая точка кривой D-разбиения определяет такие значения параметров, при которых характеристическое уравнение имеет чисто мнимые корни. При переходе через кривую D-разбиения по крайней мере один вещественный корень или пара комплексно-сопряженных корней характеристического уравнения пересекает мнимую ось. Штриховка D-кривой производится слева по направлению движения при движении от к , если главный определитель системы (1.23) 0 , и справа, если 0 . Криволинейная граница D-разбиения должна быть дополнена “особыми прямыми”. Такие уравнения получаются подстановкой в уравнение (1.22) частот 0 , и 0 других i , при которых решение системы (1.23) имеет вид . В рассматриваемой 0 системе i отсутствуют. Особая прямая при 0 соответствует в характеристическом уравнении (1.22) свободному члену ðåã iKK* 0 . Откуда получаем уравнение первой особой прямой K ðåã iK* . (1.25) Уравнение особой прямой при можно получить, приравняв нулю коэффициент при старшем члене характеристического уравнения (1.22) T0Tì2ô 0 ; или Tì2ô 0 . (1.26) Штриховка “особых прямых” наносится таким образом, чтобы одновременно заштрихованные или одновременно незаштрихованные стороны D-кривой и прямой располагались навстречу друг другу. 8 Практическая часть Исходные данные НЕИЗМЕНЯЕМЫЕ ПАРАМЕТРЫ T0 6 с, K* 3 с, Tê 0.09 с, ðåã 3.5 , i 2.3 . ВАРЬИРУЕМЫЕ ПАРАМЕТРЫ Tì ô , Ê . На Рис. 1.5. показана структурная схема системы автоматического регулирования угловой скорости паровой турбины, реализованная в МВТУ-3.6. f0 f0 i K* K Рис. 1.5. Структурная схема Кривая D-разбиения, построенная по формулам (1.24) при , а также две особые прямые, полученные согласно формулам (1.25) и (1.26), показаны на Рис. 1.6. 2 1.9 1.8 1.7 1.6 1.5 1.4 1.3 1.2 1.1 1 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0.1 0 0.15 0.3 0.45 0.6 0.75 0.9 1.05 1.2 1.35 1.5 1.65 1.8 1.95 2.1 2.25 2.4 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Рис. 1.6. D-разбиение На Рис. 1.6. отмечены точки в области параметров Ê и Tì ô , для которых нужно построить графики переходных процессов. 9 Коэффициенты колебательного звена (Рис. 1.5.) определяются по формулам (1.17), где Tì ô 0.9 с для точек A , B и C K 1 0.09 0.9 0.286 ; T 0.51 c; b 0.0254 . 3.5 2 0.9 3.5 3.5 Получим графики переходных процессов (t ) для точек A , B и C , показанных на Рис. 1.6.. 1) Точка A : Tì2ô 0.9 c2, K 0.2 . Рис. 1.7. График переходного процесса в точке A Переходный процесс асимптотически устойчивый. 10 2) Точка B : Tì2ô 0.5 c2, K 1.13 . Рис. 1.8. График переходного процесса в точке B Переходный процесс неасимптотически устойчивый. 3) Точка C : Tì2ô 0.5 c2, K 2.5 . Рис. 1.9. График переходного процесса в точке C 11 Переходный процесс неустойчивый. Построим рабочую характеристику ( f 0 ) . Задаваясь пятью значениями f 0 , получим f0 0.90 0.95 1.00 1.05 1.10 0.6452 0.681 0.7169 0.7527 0.7886 Рабочая характеристика 0.85 0.8 gamma 0.75 0.7 0.65 0.6 0.55 0.5 0.85 0.9 0.95 1 1.05 1.1 1.15 f0 Рис. 1.10. Рабочая характеристика паровой турбины Как видно из графика (Рис. 1.10.), рабочая характеристика линейная, что и ожидалось согласно дифференциальному уравнению (1.8). Заключение. В данной лабораторной работе методом D-разбиения были определены области возможных значений двух параметров – коэффициента усиления Ê и муфты маятника Tì ô , обеспечивающих устойчивую работу САР угловой скорости паровой турбины. Построением в МВТУ-3.6 графиков переходных процессов для трех точек из плоскости D-разбиения была подтверждена корректность определения данных областей. Была также построена рабочая характеристика ( f 0 ) паровой турбины, которая оказалась линейной. Данная САР является системой со статическим регулированием, так как равновесие системы имеет место при различных значениях регулируемой величины и каждому значению регулируемой величины соответствует единственное определенное положение регулирующего элемента. 12