Здесь - Московский государственный университет им. М.В
реклама

Московский Государственный Университет
им. М.В.Ломоносова
─────────────────────────────────────
ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ
кафедра
ФИЗИКИ ПОЛИМЕРОВ И КРИСТАЛЛОВ
Курсовая работа:
«Моделирование цепочек пептида (ALA-GLY)6
в водном растворе методом молекулярной
динамики»
ИСПОЛНИТЕЛЬ
Студент группы № 417
Третьяков Н.Н.
НАУЧНЫЙ РУКОВОДИТЕЛЬ
профессор
Москва 2007
Халатур П.Г.
Содержание
1. Введение
2. Цели работы
3. Теоретическая часть
a. Молекулярная Динамика (МД)
b. Термостат Берендсена
c. Алгоритм Верле
d. Неявный учёт растворителя по схеме SASA
e. Вторичная структура пептидов
f. Карты Рамачандрана
4. Моделирование
a. Исследование поведения олигопептида (подбор параметров в схеме
SASA)
b. Создание параллельных и антипараллельных ориентаций цепочек
c. Анализ вторичных структур
5. Выводы
6. Что было сделано в ходе работы
7. Что планируется делать дальше
8. Список литературы
Введение
В данной работе будет проведено исследование цепочек (ALA-GLY)6. ALA
и GLY являются основными аминокислотами в таких материалах, как шёлк и
паутина. Благодаря небольшим размерам боковых цепей у каждой из
аминокислот, цепочки (ALA-GLY)n могут образовывать β-листы –
упорядоченные вторичные структуры.
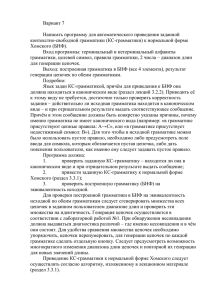
Цепочки, используемые для получения шёлка или паутины, состоят из
белкового фиброина. На первом рисунке показана структура фиброина:
антипараллельные слои, состоящие, в основном, из ALA(фиолетовый цвет) и
GLY(жёлтый цвет). Небольшой размер боковых цепей допускает плотную
упаковку каждого листа слоя. На втором рисунке представлена электронная
микрофотография (подкрашенная) прядей фиброина, появляющихся из
прядильных органов паука.
Цели работы:
1.
Проанализировать, образуются ли упорядоченные вторичные структуры
(β-листы) при моделировании 2-х, 3-х и 4-х цепочек (ALA-GLY)6 в случаях
параллельной и антипараллельной ориентации цепочек.
2.
Если такие структуры образуются, то выяснить, стабильны ли они на
времени МД-эксперимента.
3.
Сделать вывод о том, какая ориентация цепочек предпочтительна для
образования упорядоченных вторичных структур.
Молекулярная Динамика (МД)
В основе методов молекулярной динамики лежит представление о
многоатомной молекулярной системе, в которой все атомы являются
материальными точками. Поведение отдельного атома описывается
классическими уравнениями движения и имеет вид:
d 2 ri (t )
mi
Fi ,
2
dt
здесь i – номер атома (i [1, n]) ,
n
(1)
– полное число атомов в системе,
mi - масса атома, ri – радиус-вектор атома, Fi – равнодействующая сил,
действующих на атом.
Равнодействующая сила складывается из:
U (r1 ,..., rn ) ext
Fi
Fi
ri
(2)
U
ext
Fi – сила, определяемая
– потенциальная энергия системы,
взаимодействиями с молекулами среды.
Первая составляющая – сила, действующая на данный атом со стороны
всех остальных атомов. Эта сила записана как градиент потенциальной энергии
системы, так как взаимодействие между атомами является потенциальным.
Потенциальную энергию системы можно представить в виде суммы
вкладов от различных типов взаимодействий между атомами:
U U b U U U f U qq U VW
(3)
Ub
– потенциальная энергия валентных связей,
U
– торсионных углов,
U qq
U
– валентных углов,
U f – плоских групп и псевдоторсионных углов,
– кулоновских сил, U VW – взаимодействий Ван-дер-Ваальса.
Для каждого типа взаимодействий характерен свой закон.
Энергия валентных взаимодействий и энергия колебаний валентных углов
описываются параболическими потенциалами:
1 Nb
U b (r ) K b,i (ri r0i ) 2
2 i 1
(4)
K b ,i – эффективная жёсткость валентной связи,
i
– номер связи в молекуле,
N b – полное число валентных связей, ri – длина связи, r0 i – равновесная длина
связи.
1 N
U ( ) K ,i (i 0i )2
2 i 1
(5)
K ,i – эффективная упругость валентного угла,
N – полное число валентных углов,
i
– номер валентного угла,
i – значение валентного угла, 0i – его
равновесное значение.
Потенциальная энергия для торсионных углов, плоских групп задается
общим выражением (6), представляющим собой ряд Фурье. Было установлено,
что во всех случаях достаточно оставлять не более четырёх членов ряда
(включая нулевой).
1 Ф L
U ( ) K ,l 1 g ,l cos(n ,l )
2 1 l 1
K ,l – константа,
(6)
– номер торсионного угла, l – номер гармоники,
g ,l – вклад гармоники в потенциал торсионного угла (–1 < g ,l < 1),
n ,l – кратность гармоники. Потенциалы U f и U отличаются константами.
Потенциальная
энергия
взаимодействия
характеризуется электростатическим потенциалом:
qi q j
U qq (ri , r j )
i j ri , j
(7)
заряженных
атомов
ri , r j – координаты взаимодействующих атомов, qi , q j – их парциальные
– диэлектрическая проницаемость среды (для вакуума = 1),
ri , j ri r j .
заряды,
Взаимодействие между атомами, не связанными валентной связью,
описываются с помощью потенциала Леннард-Джонса (8).
A
B
U VW (ri , r j ) 12 6
i j
ri , j ri , j
B и A
(8)
– константы, определяющие глубину потенциальной ямы и
расположение её минимума,
взаимодействующих атомов.
ri , j ri r j , где
ri ,
rj –
Отталкивание в этой формуле аппроксимируется членом ~
координаты
1
, выбор
ri12
,j
степени 12 обусловлен математическими удобствами.
В программной реализации молекулярной динамики, внутренние
координаты системы пересчитываются в декартовы координаты атомов и
наоборот с помощью алгоритма Эйринга.
Термостат Берендсена
В реальных экспериментах молекулы обычно находятся в растворах и
взаимодействуют с молекулами растворителя. Температура системы
поддерживается за счёт обмена энергией с внешней средой. Детальный учёт
взаимодействия молекулы с внешней средой часто невозможен. Для учёта
эффектов обмена энергией с внешней средой используются специальные
алгоритмы – термостаты.
В молекулярной динамике температура молекулярной системы вводится
через удельное среднее значение кинетической энергии. Выражение для
средней кинетической энергии системы имеет вид:
N
E
m
n 1
n
2
n
2N
(9)
m – молекулярная масса атома, n – скорость n-го атома, N – полное число
атомов.
Из статистической физики известно, что кинетическая энергия системы и
её температура связаны следующим соотношением:
E
3k BT
2
(10)
k B – постоянная Больцмана.
Из (9) и (10) получаем мгновенное значение "температуры":
N
T
m
n 1
2
n n
3k BT
(11)
Далее, проведя усреднение по времени, получим значение температуры в
молекулярно-динамическом эксперименте:
1
T
3k BT
t0 N
m
t0
n 1
n
2
n
dt
(12)
Использование термостата особенно важно на этапе релаксации системы.
В случае установившегося термодинамического равновесия температура
термостата и средняя температура молекулярной системы должны совпадать.
Энергии подсистем обычно много меньше энергии термостата, это является
условием практического равновесия. При изучении молекулярной динамики
обычно фиксируют температуру термостата. Температура молекулярной
системы может при этом меняться вследствие различных причин. Например, изза конечного шага интегрирования частица может оказаться в классически
запрещённой области. Это приведет к резкому скачку энергии, а затем и
температуры.
Мы рассмотрим один из наиболее часто встречающихся термостатов –
термостат Берендсена, использующий в уравнениях движения знакопеременное
нелинейное трение.
Алгоритм Берендсена основан на введении знакопеременного трения.
Отклонения температуры (T) от её равновесного значения (T0) корректируются
согласно уравнению Ландау-Теллера:
dT (t ) T0 T (t )
dt
(13)
T (t ) – текущее значение температуры.
Отклонения в значении температуры экспоненциально убывают с
характерным временем . Изменение кинетической энергии моделируется
путем перемасштабирования скоростей атомов молекулярной системы на
каждом шаге:
T0
t
1
1
1 T (t t )
2
(14)
– коэффициент пересчёта скоростей, 1 – постоянная времени.
Известно, что использование термостата Берендсена, особенно для
относительно небольших систем и на длинных траекториях, приводит к
физически некорректным результатам, связанным с неравномерным
распределением энергии по степеням свободы.
Алгоритм Верле
Существуют различные численные методы решения системы классических
уравнений движения. В молекулярной динамике широко используется метод
Верле, являющийся компромиссом между точностью процедуры и скоростью её
реализации:
Силы, действующие на атом, находятся как производные потенциальной
энергии:
U (r1 ,..., rn ) ext
Fi
Fi
ri
(15)
Затем рассчитываются новые координаты
определяются равнодействующие силы:
атомов,
из
a (t )
ri (t t ) ri (t ) i (t )t i t 2
2
(16)
Здесь a – ускорение, a (t t )
F (t t )
.
m
Далее определяются скорости атомов:
которых
a(t t ) a(t )
t
2
(t t ) (t )
(17)
Одной из наиболее существенных проблем процедуры интегрирования
является выбор шага. При большом шаге погрешности интегрирования могут
быть значительными, что приведёт к нестабильности траектории. При малом
шаге существенно увеличивается время расчёта. В уравнениях движения,
описывающих изменения по различным степеням свободы, временные
характеристики существенно отличаются друг от друга. Для достаточно точного
вычисления решения по быстрым и медленным переменным шаги
интегрирования по ним могут различаться. По быстрым переменным может
быть выбран значительно больший шаг. В методе Верле шаг интегрирования
берётся единым, оптимальным считается шаг 1-1,5 фс, что является примерно
десятой частью периода самых быстрых молекулярных колебаний.
Начальные скорости атомов выбираются с помощью генератора случайных
чисел в соответствии с распределением Максвелла при заданной температуре.
Неявный учёт растворителя по схеме SASA
U imp U b U U U f U qq ( ) U VW U solv ( ) .
(18)
Потенциальная энергия системы в случае неявного учёта растворителя
немного отличается от той, которая относится к явному учёту растворителя.
Появляется зависимость кулоновского потенциала от и член, связанный с
растворением U solv ( ) :
N
U solv i i
i 1
,
(19)
где i - доступные поверхности, а i - коэффициенты, определяющиеся
эмпирически (так, чтобы аппроксимировать экспериментальные данные).
Если проводить МД-эксперимент при явном задании молекул растворителя,
то на это требуется довольно большое количество времени. Поэтому
существуют различные методы, позволяющие избежать прямого задания
молекул растворителя. В своей работе я применял схему неявного учёта
растворителя SASA (Solvent Accessible Surface Area).
SASA – это быстрый метод неявного учёта растворителя, применяемый при
моделировании пептидов. Полярные и неполярные вклады каждого атома в
свободную
энергию
растворения
принимаются
пропорциональными
поверхности, доступной растворителю. Модель SASA использует только 2
параметра растворимости (константы пропорциональности) и аппроксимирует
поверхность, доступную растворителю для каждого растворённого атома,
простой аналитической функцией, которую легко можно получить.
Электростатическое
экранирование
между
растворёнными
зарядами
учитывается использованием диэлектрической функции, зависящей от
расстояния.
Схема SASA успешно применяется в моделировании пептидов и известно,
что её использование замедляет расчеты только на 50% по сравнению с
расчетами, проводимыми в вакууме.
Мы принимаем, как это обычно делается, что потенциальная энергия
системы состоящей из растворённого вещества и растворителя, делится на три
части: внутренней потенциальной энергии растворённого вещества U ({X }) ,
внутренней потенциальной энергии растворителя V ({Y }), потенциальной
энергии взаимодействия между растворённым веществом и растворителем
W ({ X },{Y }) . Здесь {X } - обозначает степени свободы растворённого вещества, а
{Y } - степени свободы растворителя. Интегрируя по всем степеням свободы
растворителя, можно получить потенциал W ({X }) , также называемый
эффективной энергией. Он может быть записан как сумма внутренней
потенциальной энергии растворённого вещества U ({X }) и свободной энергии
растворения, которая описывает все эффекты, индуцированные растворителем.
Любая модель неявного учёта растворителя основанная на поверхности,
доступной растворителю, ссылается на идею о том, что главный вклад в
свободную энергию растворения определяется поверхностью растворённого
вещества, доступной растворителю и экранирующим эффектом растворителя.
Следую этому, в схеме SASA принимается, что свободная энергия растворения
– это сумма атомных вкладов, пропорциональных поверхности, доступной
растворителю для каждого атома, плюс учёт экранирования. Константы
пропорциональности – это параметры растворимости.
В схеме SASA, поверхность, доступная растворителю, аппроксимируется
вероятностным способом. В основе этого лежит простая формула для
вероятности вычислить доступную поверхность для атома i, если присутствуют
N атомов, случайным выбором точки на сольватной оболочке атома i. Однако,
такая формула применима только лишь в предположении, что все атомы
распределены случайно. Естественно, так не происходит, хотя бы потому, что
Ван-дер-Ваальсовы сферы не могут проходить друг через друга. Самый
прагматичный подход в данном случае – включить два типа параметров в
исходную формулу: параметр типа атома и параметры связи. Параметры связи
отличают приграничные атомы от более удалённых.
Вторичная структура пептидов
Термин вторичная структура относится к локальной конформации
некоторой части полипептида. Некоторые типы вторичной структуры частично
стабильны и часто встречаются в белках, это -спирали и -конформации.
Используя
фундаментальные
химические
принципы
и
некоторые
экспериментальные наблюдения, Linus Pauling и Robert Corey предсказали
существование этих вторичных структур в 1951 году, за несколько лет до того
как была получена первая полная структура
белка.
Простейшее упорядочивание, которое
может принимать полипептидная цепь с
жёсткими пептидными связями (но другие
связи при этом свободны для вращения) – это
спиралевидная структура, которую Pauling и
Corey назвали -спиралью.
Pauling и Corey предсказали также и
второй тип вторичной структуры, конформации.
Это
более
вытянутая
конформация полипептидных цепей, и она
была подтверждена рентгеновским анализом.
-конформации,
В
основная
цепь
полипептида вытянута зигзагообразно. Эти
зигзагообразные полипептидные цепи могут
быть упакованы плечо к плечу, и, таким образом, сформировать структуру,
представляющую собой серию складок. В таком упорядочении, названном листом, водородные связи образовываются между смежными сегментами
полипептидной цепи.
Смежные полипептидные цепи в -листах могут быть либо параллельны,
либо антипараллельны (иметь одинаковую или противоположную ориентацию
N- и C-концов цепи, соответственно). -кератины, такие как фиброин шёлка и
фиброин паутины имеют высокое содержание Gly и Ala остатков, двух
аминокислот с наименьшими боковыми R группами.
Карты Рамачандрана
В конце 1930-х годов, Pauling и Corey провели серию экспериментов,
которые легли в основу нашего современного понимания структуры белков. В
результате, Pauling и Corey пришли к выводу, что пептидные C-N связи не
могут свободно вращаться, поскольку имеют частично характер двойной связи.
Вращение разрешено относительно N-Cα и Cα-С связей. Поэтому основная цепь
полипептида может быть изображена как последовательность жёстких
плоскостей, имеющих общие точки вращения в местах расположения атомов Cα.
По общему соглашению, углы связей, получающиеся в результате
вращения относительно Cα, обозначаются как (фи) для N-Cα связи и (пси)
для Cα-С связи. Опять таки, по общему соглашению, и , и равны 1800
когда полипептидная цепь полностью вытянута и пептидные группы лежат в
одной плоскости. В принципе, и могут иметь любое значение между -1800
и +1800, но многие из них запрещены стерическими вмешательствами между
атомами полипептидной цепи и аминокислотными остатками. Доступные
значения и графически представлены на графике, имеющем название
карта Рамачандрана.
Моделирование
При моделировании цепочек (ALA-GLY)6 для ускорения расчётов
планировалось использовать схему неявного учёта растворителя (воды) SASA.
Для того, чтобы правильно подобрать параметры гидрофильности /
гидрофобности проводилось моделирование олигопептида deamino-oxytocin
(PDB 1XY2, его состав: TYR-ILE-GLN-ASN-CYS-PRO-LEU-GLY) при явном и
неявном учёте воды. При явном учёте в ячейку с олигопептидом добавляются
молекулы воды. При неявном используется потенциальная схема, которая
симулирует взаимодействие атомов олигопептида с молекулами воды, которые
в явном виде в ячейке не существуют. Моделирование производится с помощью
Tinker Molecular Modeling Package.
В качестве характеристики, позволяющей сравнить поведение олигопептида
при 2-х различных способах учёта воды, выбран радиус инерции. Его квадрат
определяется из соотношения
R
2
gyr
1 N
(ri r0 ) 2 .
N i 1
Исследование поведения олигопептида (подбор параметров в схеме SASA).
Для начала, нужно указать, какие параметры были общими для 2-х случаев
учёта растворителя. В качестве таковых выступали следующие параметры:
Потенциальное поле Amber96, 50000 шагов, запись значений в файл каждые 100
шагов. Канонический ансамбль (NVT), Температура 300К, термостат
Берендсена
(постоянная времени = 0.1 пс), периодические граничные условия кубическая ячейка со стороной 24.662А, радиус обрезания В-д-В и
Кулоновских взаимодействий равен 9.0А. Алгоритм интегрирования - Верле,
шаг интегрирования 1фс. Начальная конформация достигалась путём
минимизации потенциальной энергии подпрограммой MINIMIZE.
Вначале производилось моделирование при явном учёте воды. Модель воды –
TIP3P. Количество молекул воды в ячейке – 450. Далее, был рассчитан радиус
инерции олигопептида на каждом шаге.
Затем производилось моделирование при неявном учёте воды через схему
SASA. Далее варьировались параметры гидрофобности / гидрофильности.
Сначала уменьшаем в 2 раза гидрофильность. Затем увеличиваем
гидрофобность в 2, в 1.5 и в 1.2 раза по сравнению с исходными значениями.
Затем проводим эксперимент при параметрах гидрофильности, умноженных на
0,75 и двух значениях гидрофобности: *1,2 и *1,25.
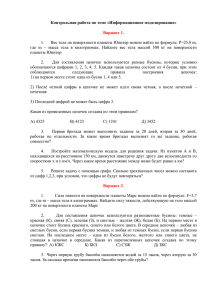
Итого, моделирование при неявном учёте воды проводилось 6 раз. Результаты
представлены на графиках.
Rgyr
Зависимость радиуса инерции от номера шага
Explicit
Phil*0.5
Phil*0.5+Phob*2
Phil*0.5+phob*1.5
7,60
7,50
7,40
7,30
7,20
7,10
7,00
6,90
6,80
6,70
6,60
6,50
6,40
6,30
6,20
6,10
6,00
5,90
5,80
5,70
5,60
5,50
5,40
0
100
200
300
400
500
номер шага
Зависимость радиуса инерции от номера шага
8,25
Explicit
Phil*1+phob*1
Phil*0.5
8,00
7,75
7,50
Rgyr
7,25
7,00
6,75
6,50
6,25
6,00
0
100
200
300
номер шага
400
500
Rgyr
Зависимость радиуса инерции от номера шага
7,20
7,10
7,00
6,90
6,80
6,70
6,60
6,50
6,40
6,30
6,20
6,10
6,00
5,90
5,80
5,70
5,60
5,50
5,40
Explicit
Phil*0.5+phob*1.5
Phil*0.5+phob*1.2
0
100
200
300
400
500
номер шага
Зависимость радиуса инерции от номера шага
Explicit
Phil*0.5+phob*1.2
Phil*0.75+phob*1.2
7,30
7,20
7,10
7,00
6,90
6,80
6,70
Rgyr
6,60
6,50
6,40
6,30
6,20
6,10
6,00
5,90
5,80
5,70
0
100
200
300
номер шага
400
500
Rgyr
Зависимость радиуса инерции от номера шага
Explicit
Phil*0.75+phob*1.2
Phil*0.75+phob*1.25
7,20
7,15
7,10
7,05
7,00
6,95
6,90
6,85
6,80
6,75
6,70
6,65
6,60
6,55
6,50
6,45
6,40
6,35
6,30
6,25
6,20
6,15
6,10
6,05
6,00
100
0
300
200
номер шага
500
400
Rgyr
Зависимость радиуса инерции от номера шага
7,10
7,05
7,00
6,95
6,90
6,85
6,80
6,75
6,70
6,65
6,60
6,55
6,50
6,45
6,40
6,35
6,30
6,25
6,20
6,15
6,10
6,05
6,00
Explicit
Phil*0.75+phob*1.25
0
100
200
300
номер шага
400
500
Обсуждение результатов.
Если принять модель с явным учётом воды за эталон, то наиболее близки к ней,
судя по радиусу инерции олигопептида, значения гидрофильности умноженное
на 0.75 в сочетании с увеличением в 1.25 раза гидрофобности.
Соответственно, для схемы SASA при моделировании цепочек (ALA-GLY)6
можно использовать указанные значения параметров гидрофильности /
гидрофобности.
Создание параллельных и антипараллельных ориентаций цепочек.
Вначале при помощи модуля PROTEIN из пакета TINKER была создана
цепочка (ALA-GLY)6 причем С-конец у первого остатка глицина, а N-конец,
соответственно, у последнего аланина. Затем, используя модуль XYZEDIT из
пакета TINKER, были получены необходимые конформации цепочек:
Антипараллельная и параллельная ориентация 2-х цепочек
Антипараллельная и параллельная ориентация 3-х цепочек
Антипараллельная и параллельная ориентация 4-х цепочек
Далее, с помощью модуля MINIMIZE из пакета TINKER были получены
начальные конформации для МД-моделирования:
Антипараллельная и параллельная ориентация 2-х цепочек после MINIMIZE
Антипараллельная и параллельная ориентация 3-х цепочек после MINIMIZE
Антипараллельная и параллельная ориентация 4-х цепочек после MINIMIZE
Для самого моделирования были выбраны следующие параметры:
Потенциальное поле amber96, схема учёта воды SASA, NVT-ансамбль, T=300 К,
термостат Берендсена, = 0.1, алгоритм интегрирования Верле, ПГУ
100Ах100Ах100А, радиус обрезки В-д-В и Кулоновского потенциалов 45А,
запись в файл каждые 100 шагов. Количество шагов было разное. Для 3
различных параллельных ориентаций цепочек было сделано по 100000 шагов,
для 3-х различных антипараллельных ориентаций цепочек было сделано по
200000 шагов.
Анализ вторичных структур
Затем из МД-траекторий были выбраны случайные файлы координат атомов и
проведены измерения торсионных углов и . Так как в случае параллельных
ориентаций цепочек образования упорядоченной вторичной структуры не
происходило, то анализировались антипараллельные ориентации.
Случайная точка МД-траектории, антипараллельная ориентация 2-х цепочек, 3х цепочек:
Случайная точка МД-траектории, антипараллельная ориентация 4-х цепочек и
для сравнения случайная точка МД-траектории, параллельная ориентация 2-х
цепочек:
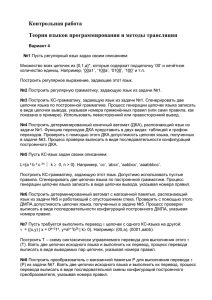
Значения углов и .(карта Рамачандрана) для 2-х антипараллельных цепочек в
сравнении с картой Рамачандрана с указанием принадлежности областей вторичным
структурам:
Ramachandran Plot for 2 AntiParallel chains
180
120
(degrees)
60
0
-60
-120
-180
-180
-120
-60
0
(degrees)
60
120
180
Значения углов и .(карта Рамачандрана) для 3-х антипараллельных цепочек в
сравнении с картой Рамачандрана с указанием принадлежности областей вторичным
структурам:
Ramachandran Plot for 3 AntiParallel chains
180
120
(degrees)
60
0
-60
-120
-180
-180
-120
-60
0
(degrees)
60
120
180
Значения углов и .(карта Рамачандрана) для 4-х антипараллельных цепочек в
сравнении с картой Рамачандрана с указанием принадлежности областей вторичным
структурам:
Ramachandran Plot for 4 AntiParallel chains
180
120
(degrees)
60
0
-60
-120
-180
-180
-120
-60
0
(degrees)
60
120
180
По приведённым графикам для углов и и визуально можно сделать
вывод о том, что в случае антипараллельных ориентаций цепочек происходит
образование упорядоченной вторичной структуры (антипараллельного β-листа),
стабильной на времени МД-эксперимента (200000 шагов по 1 фс, то есть, 200
пс). Некоторые точки на графиках выпадают. Это можно объяснить тем, что
почти все эти точки отвечают концевым атомам Сα (участвующим в
образовании N- и C-концов), а значит, краевые эффекты более существенны,
нежели для центральных областей цепочек.
Выводы
Были проанализированы антипараллельные и параллельные ориентации
цепочек (ALA-GLY)6. Образование упорядоченных вторичных структур
наблюдалось лишь в случае антипараллельных ориентаций цепочек. Также в
ходе работы было установлено, что на времени МД-эксперимента (200000
шагов по 1 фс, то есть, 200 пс) антипараллельные ориентации стабильны.
Что было сделано в ходе работы
1. Изучены статьи и книги, связанные с тематикой работы и с
моделированием методом МД.
2. Были освоены модули PROTEIN, DYNAMIC, MINIMIZE, ANALYZE,
PROTEIN, XYZEDIT из пакета TINKER.
3. Для получения качественных иллюстраций и при создании видеоклипов
были использованы программы RasWin, PyMol, Fortran PowerStation 4.0,
Swiss PDB Viewer, Ulead GIF Animator 5.
4. Построены карты Рамачандрана для определения вторичной структуры.
Что планируется делать дальше
1. Освоить программы автоматического анализа вторичной структуры –
STRIDE и DSSP.
2. Изучить модуль CRYSTAL из пакета TINKER. Этот модуль готовит
кристаллические структуры. Это нужно, чтобы самому собрать
регулярную периодическую структуру, а потом анализировать её
поведение в МД-эксперименте.
3. Продолжать изучение антипараллельных ориентаций цепочек с
использованием результатов модуля CRYSTAL.
Список литературы:
M.P.Allen, D.J.Tildesley, Computer simulation of liquids, Oxford, 1987.
A.Lehninger,Principles of biochemistry, 4th edition, 2004.
J.M.Gosline, P.A.Guerette, C.S.Ortlepp, K.N.Savage, The mechanical design of
spider silks. From fibroin sequence to mechanical function, JEB 202, 3295–3303
(1999).
Guofeng Xu, Weixun Wang, J.T.Groves, M.H.Hecht, Self-assembled monolayers
from a designed combinatorial library of de novo β-sheet proteins, PNAS vol. 98,
no. 7, pp. 3652–3657, 2001.
H-A Klok, A.Rösler, G.Götz, E. Mena-Osteritz, P.Bäuerle, Synthesis of a silkinspired peptide-oligothiophene conjugate, Org. Biomol. Chem. 2, 3541-3544,
2004.
Min-yi Shen, K.F.Freed Long time dynamics of Met-Enkephalin: comparison of
explicit and implicit solvent models, Biophysical Journal, Vol. 82, 1791-1808,
2002.