Лабораторная работа № 2. Изучение эллипсоида инерции
реклама

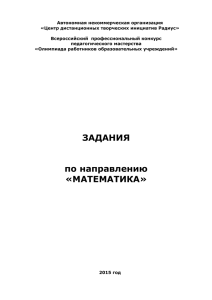
1 Лабораторная работа № 2 Изучение эллипсоида инерции твердых тел Принадлежности: 1) установка, 2) секундомер, штангенциркуль. Теория. Рассмотрим твердое тело, закрепленное таким образом, что оно может вращаться вокруг неподвижного центра масс. Введем декартову систему координат с началом в центре масс. Бесконечно малый i-й элемент тела, имеющий координаты xi, yi, zi будет иметь скорость vi ω ri , где ω — вектор угловой скорости, описывающий вращение твердого тела, а ri — радиус-вектор, проведенный из начала координат в точку, где находится i-й элемент. Пусть масса этого элемента равна Δmi. Момент импульса тела относительно центра масс будет равен (1) L mi ri vi miri (ω ri ) mi (ωri2 ri (ri ω)). i i i Расписывая (1) по проекциям на координатные оси, получим Lx J xx ω x J xy ω y J xz ω z , Ly J yx ω x J yy ω y J yz ω z , (2) Lz J zx ω x J zy ω y J zz ω z , где шесть величин J xx mi ( yi2 zi2 ), J yy mi ( xi2 zi2 ), J zz mi ( xi2 yi2 ), i i J xy J yx mi xi yi , J xz J zx mi xi zi , i i i J yz J zy mi yi zi i определяют тензор инерции. Величины Jxx, Jyy, Jzz являются диагональными элементами тензора и называются осевыми моментами инерции. Jxy, Jyx, Jxz, Jzx, Jyz, Jzy являются недиагональными элементами тензора и называются центробежными моментами инерции. Тензор, обладающий указанной симметрией, (Jxy = Jyx, …), называется симметричным тензором. Симметричный тензор можно привести к диагональному виду, т. е. выбрать такую систему координат, определяемую формой и положением тела, в которой все недиагональные элементы будут равны нулю. Соответствующие направления координатных осей называются главными осями инерции, а величины Jz Jxx, Jy Jyy, Jz Jzz — главными моментами инерции. Если твердое тело вращается вокруг закрепленной оси, то удобно представить r1 di ρi , ãäå di ω, ρi ω (вектор ω направлен вдоль оси в соответствии с правилом правого винта). В этом случае скорость i-го элемента vi ω ρi . При рассмотрении этого случая вводится понятие момента импульса относительно фиксированной оси. Если ось проходит через центр масс, то соответствующий момент импульса равен (3) miρi vi miρi (ω ρi ) miρ2i ω Jω, где (4) J miρi2 является моментом инерции относительно оси, определяющей направление вектора угловой скорости ω. Чтобы выразить момент инерции J через координаты i-гo элемента, введем направляющие косинусы ω ω ω cos α x , cosβ y , cos γ z , (ω ω2x ω2y ω2z ) (5) ω ω ω и представим ρi2 ri 2 di2 . Рассмотрим d i2 2 2 ω di2 ri ( xi cos α yi cosβ zi cos γ) 2 . 2 Учитывая (6) и тождество cos α+cos2β+cos 2 γ=1, представим J в виде J mi (( xi2 yi2 zi2 )(cos 2 α cos 2 β cos 2 γ) ( xi cos α yi cosβ zi cos γ) 2 . Группируя в (7) члены по степеням косинусов, получим J J xx cos 2 α J yy cos 2 β J zz cos 2 γ+ +2J xy cos α cosβ+2J xz cos α cos γ+2J yz cosβ cos γ. (6) (7) (8) В соотношении (8) компоненты тензора Jxx, Jxy и т. д. при вращении тела меняют свою величину, так как они определяются с помощью неподвижной системы координат, а не системой координат, связанной с телом. Если ввести такую систему координат, для которой в некоторый момент времени тензор инерции принимает диагональный вид, то для этого момента времени получим (9) J J x cos2 α+J y cos2 β+J z cos2 γ. С другой стороны, как следует из определения (4), J не меняется при вращении тела. Поэтому для определения J по формуле (8) можно брать любой момент времени, в частности и тот, в который система координат, связанная с телом, совпадает с некоторой неподвижной системой, т. е. в (8) можно рассматривать Jxx, Jxy и т. д., определенными в некоторой системе координат, связанной с телом. Рассмотрим геометрическую интерпретацию соотношения (8). Введем декартову систему координат и для каждого значения α, β, γ отложим по осям OX, OY, OZ величины cos cosβ cos γ (10) x , y , z . J (α,β,γ) J (α,β,γ) J (α,β,γ) Множество точек с координатами х, у, z определят некоторую поверхность. Чтобы найти уравнение этой поверхности, подставим в (8) направляющие косинусы, выраженные через х, у, z: cos α x J , cosβ y J , cos γ z J . При этом получим уравнение поверхности второго порядка (11) J xx x2 J yy y 2 J zz z 2 2J xy xy 2J xz xz 2J yz yz 1. Из вида уравнения следует, что рассматриваемая поверхность является эллипсоидом. Этот эллипсоид называется эллипсоидом инерции. С помощью этого эллипсоида легко определить значение момента инерции, если заданы направляющие косинусы оси. Проведем из центра эллипсоида вектор с направляющими, косинусами cos α, cosβ, cos γ . Длина этого вектора до пересечения с поверхностью эллипсоида будет равна 1/ J . Действительно, cos 2 α cos 2 β cos 2 γ 1 x2 y 2 z 2 . (12) J J Описание установки. Тело, для которого определяются моменты инерции,— однородный металлический параллелепипед (рис. 1). Поместим начало координат в центр масс параллелепипеда, оси координат направим по его осям симметрии. Направим ось ОХ нормально к наибольшей по величине грани параллелепипеда, ось OY — нормально к средней грани, а ось OZ — нормально к наименьшей грани. В середине каждой грани сделаны небольшие углубления для закрепления тела при его вращении вокруг осей OX, OY, OZ. Углубления сделаны также в местах, позволяющих укреплять тело при его вращении около осей MM1, MN1, DB1. Параллелепипед неподвижно укрепляется в рамке, которая подвешена на упругой металлической проволоке и может совершать крутильные колебания. В состав установки входят также электронный таймер и фотоэлектрическая система, регистрирующая число 3 полных периодов колебания рамки. Уравнение вращательного движении рамки с исследуемым параллелепипедом имеет вид (13) ( J 0 J )φ=-fφ, где J0 — момент инерции рамки, J — момент инерции параллелепипеда относительно данной оси, f — модуль кручения проволоки, φ — угол отклонения рамки от положения равновесия. Решение этого уравнения — гармоническое колебание с периодом J J T 2π 0 . (14) f Рис. 1 Период колебаний рамки без параллелепипеда равен J T0 2π 0 . (15) f Из этих двух выражений T 2 (16) J J 0 1 . T0 Пользуясь этой формулой, можно определить моменты инерции тела JOX, JOY, JOZ, J (относительно главных осей координат ОХ, OY, OZ и произвольной оси, проходящей через центр главной системы координат), выразив их соответственно через периоды колебаний ТОХ, TOY, TOZ и Т. Пусть размер параллелепипеда по оси ОХ равен а, а по оси OY равен b, по оси OZ равен с. Квадраты направляющих косинусов для его диагонали соответственно равны a2 b2 c2 2 2 cos 2 α 2 , cos β , cos γ . (17) a b2 c 2 a 2 b2 c 2 a 2 b2 c 2 Подстановка Jx, Jy, Jz, выраженных через TOX, TOY, TOZ по формуле (16), и косинусов, выраженных через а, b, с по формулам (17), в соотношение (9) приводит к уравнению T 2 a 2 T 2 b2 T 2 c2 T 2 Ox 2 Oy2 2 Oz . (18) a b c Соотношение (18) проверяется экспериментально. Измерения. Для выполнения работы необходимо измерить: 1) размеры тела (ребра параллелепипеда) — а, b, с; 2) период колебаний пустой рамки (T0) и рамки с телом, закрепленным в различных положениях. Измерения рекомендуется проводить в следующем порядке. Сначала штангенциркулем измеряют величины а, b, с не менее трех раз в разных сечениях тела и берут для каждой из них среднее арифметическое. Затем вычисляют их квадраты и сумму квадратов. Для измерения периода колебаний Т0 необходимо включить электронную часть 4 прибора нажатием клавиши «сеть». Затем необходимо нажать на клавишу «сброс» для обнуления табло прибора и отжать клавишу «пуск», в результате чего будет включена цепь питания электромагнита, фиксирующего рамку в отклоненном положении. Зафиксировав рамку в отклоненном положении с помощью электромагнита, нажимают клавишу «пуск», которая размыкает цепь питания электромагнита, включает электронный таймер и фотоэлектронную систему регистрации числа полных периодов колебаний. Нажатие на клавишу «стоп» останавливает работу электронной системы после завершения очередного периода колебаний. Период колебаний Т0 получают путем деления времени, зафиксированного на табло таймера, на число N периодов колебаний, зафиксированного на табло фотоэлектронной системы. Число периодов N рекомендуется задавать таким, чтобы относительная ошибка измерения периода Т0 была мала по сравнению с ошибками измерения других величин. После этого закрепляют в рамке параллелепипед в разных положениях и измеряют так же, как и прежде, периоды ТОХ, TOY, TOZ, Т. По полученным данным убеждаются в правильности (в пределах погрешности измерений) уравнения (18), а следовательно, и уравнения (9). Пользуясь уравнением (16), вычисляют моменты инерции параллелепипеда для осей OX, OY, OZ (в единицах момента инерции J0). Полученные значения моментов инерции сопоставляются между собой.