")
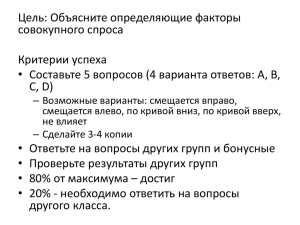
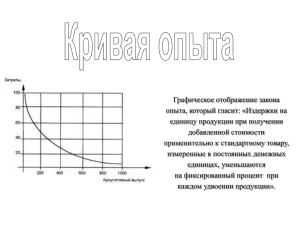
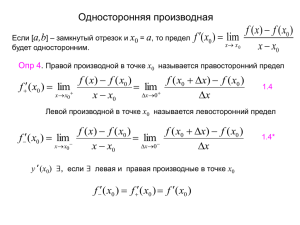
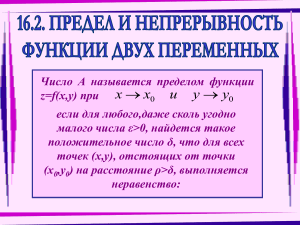
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РФ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ "ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ" А.В. Звягин, А.С. Болдырев, М.И. Струков Лекции по курсу «Дифференциальная геометрия» Учебное пособие Издательский дом ВГУ 2024 Утверждено научно – методическим советом математического факультета Воронежского государственного университета ?? декабря ?? г., протокол № ??. Р е ц е н з е н т ы: ???????? В учебном пособии дано изложение первых понятий дифференциальной геометрии. Учебное пособие подготовлено на кафедре алгебры и математических методов гидродинамики математического факультета Воронежского государственного университета. Рекомендовано для студентов очной формы обучения 1 – го и 2 – го курсов математического факультета Воронежского государственного университета. Для направлений: 01.03.01 — математика, 01.03.04 — прикладная математика, 01.05.01 — фундаментальная математика и механика, 02.03.01 — математика и компьютерные науки, 10.05.04 — информационно-аналитические системы безопасности Оглавление Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1. Вспомогательные сведения для векторных функций . . . . 2. Путь . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3. Кривая . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4. Касательная . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5. Длина пути . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6. Длина кривой . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7. Естественный параметр кривой . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8. Касательная как прямая наилучшего локального приближения кривой . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9. Кривизна и главная нормаль . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10. Плоские кривые. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11. Соприкасающаяся плоскость. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Список литературы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 5 11 14 16 19 23 25 28 32 37 43 44 Введение 4 1. Вспомогательные сведения для векторных функций В этом параграфе излагаются вспомогательные сведения, относящиеся к векторным функциям скалярного аргумента. Поскольку факты, о которых будет идти речь, являются простыми обобщениями основных понятий курса математического анализа, то мы по большей части ограничимся лишь изложением формулировок соответствующих понятий и теорем. Фиксируем в пространстве декартову систему координат с началом в точке O (см. рис. 1). Пусть, далее, каждому числу t ∈ [a, b] поставлен в соответствие по некоторому правилу вектор r = r(t) с началом в точке O. В таком случае мы будем говорить, что на отрезке [a, b] определена вектор-функция r = r(t). z r(t) k i O y j x Рис. 1 Если i, j, k — орты (единичные векторы) координатных осей x, y, z, то справедливо разложение r(t) = x(t)i + y(t)j + z(t)k, где скалярные функции x(t), y(t), z(t) — проекции вектор-функции r(t) на указанную координатную ось. Функции x(t), y(t), z(t) будем называть составляющими вектор-функции r(t). 5 Пусть на отрезке [a, b] задана вектор-функция r(t). Говорят, что вектор α является пределом этой функции в точке t0 ∈ [a, b], если lim |r(t) − α| = 0. t→t0 Аналогично определяется предел последовательности векторов. А именно, последовательность векторов rn имеет пределом вектор α, если lim |rn − α| = 0. n→∞ Свойство 1.1. Для того, чтобы вектор a = αi + βj + γk был пределом функции r(t) в точке t0 (или пределом последовательности векторов rn ), необходимо и достаточно, чтобы составляющие вектора a были пределами составляющих векторов r(t) (или rn ). Свойство 1.2. Если a = lim r1 (t), b = lim r2 (t), (a ≤ t ≤ b), то: t→t0 t→t0 1. Линейная комбинация λ(t0 )a + µ(t0 )b = lim (λ(t)r1 (t) + µ(t)r2 (t)), где λ(t) t→t0 и µ(t) — некоторые непрерывные функции t на [a, b]. 2. Скалярное произведение (a, b) = lim (r1 (t), r2 (t)); t→t0 Скалярным произведением в линейном пространстве R над полем P для элементов x, y ∈ R называется скаляр (число) (x, y), принимающее значения в P , определенное для каждой пары элементов из пространства R и удовлетворяющее следующим условиям: а) (x, y) = (y, x) для ∀(x, y ∈ R); б) (x + y, z) = (x, z) + (y, z) для ∀(x, y, z ∈ R); в) (αx, y) = α(x, y) для ∀(x, y ∈ R) и ∀(α ∈ P ); г) (x, x) ≥ 0 для ∀(x ∈ R) и (x, x) = 0 ⇔ x = θ. 3. Векторное произведение [a, b] = lim [r1 (t), r2 (t)]; t→t0 Векторным произведением упорядоченной пары векторов x и y в трехмерном евклидовом пространстве называется вектор z = [x, y], удовлетворяющий следующим требованиям: а) |z| = |x||y|sinϕ, где ϕ — угол между векторами x и y; б) вектор z ортогонален каждому из векторов x и y; 6 в) вектор z направлен так, что тройка векторов x, y, z является правой, т.е. если совместить начала векторов в одну точку, то с конца вектора z кратчайший поворот от вектора x к вектору y виден наблюдателю против часовой стрелки. 4. Пусть c = lim r3 (t), тогда смешанное произведение (a, b, c) = t→t0 = lim (r1 (t), r2 (t), r3 (t)). t→t0 Смешанное произведение (x, y, z) векторов x, y, z — скалярное произведение вектора x на векторное произведение y и z. Вектор функция r(t) называется непрерывной в точке t0 ∈ [a, b], если r(t0 ) = lim r(t). t→t0 Если вектор-функция r(t) непрерывна во всех точках отрезка [a, b], то говорят, что она непрерывна на [a, b]. В дальнейшем для приращения вектор-функции будем применять следующее обозначение: 4r = r(t + 4t) − r(t). Свойство 1.3. Для того, чтобы вектор-функция r(t) была непрерывна в точке t0 (на отрезке [a, b]), необходимо и достаточно, чтобы были непрерывны в точке t0 (на отрезке [a, b]) ее составляющие. Доказательство этого свойства есть простое следствие свойства (1.1). Свойство 1.4. Пусть r1 (t), r2 (t), r3 (t) — непрерывные функции на промежутке [a, b]. Тогда на [a, b] непрерывны следующие функции: 1. r(t) = λ1 (t)r1 (t) + λ2 (t)r2 (t) + λ3 (t)r3 (t), где λ1 (t), λ2 (t), λ3 (t) — некоторые непрерывные функции на [a, b]; 2. f (t) = (r1 (t), r2 (t)); 3. R(t) = [r1 (t), r2 (t)]; 4. h(t) = (r1 (t), r2 (t), r3 (t)). Другими словами, вместе с исходными функциями непрерывны их линейная комбинация, скалярное, векторное и смешанное произведение. Отметим, что r(t) и R(t) — вектор-функции, а f (t) и h(t) — скалярные функции. 7 Пусть на отрезке [a, b] задана вектор-функция r(t). Говорят, что она дифференцируема в точке t0 ∈ [a, b], если при 4t → 0 существует предел r(t0 + 4t) − r(t0 ) . ∆t→0 4t lim Этот предел называют производной вектор-функции r(t) в точке t0 и обозначают r0 (t0 ) или dr dt t=t0 . Свойство 1.5. Если вектор-функция дифференцируема в некоторой точке, то, очевидно, она и непрерывна в этой точке. Если вектор-функция r(t) имеет производную в каждой точке отрезка [a, b], то говорят, что она дифференцируема на всем отрезке [a, b]. Свойство 1.6. Пусть вектор-функция r(t) дифференцируема в точке t0 ∈ [a, b], тогда составляющие этой функции также дифференцируемы в точке t0 , и имеет место равенство r0 (t0 ) = x0 (t0 )i + y 0 (t0 )j + z 0 (t0 )k. Непосредственным следствием этого свойства является следующее утверждение: если r(t) дифференцируема на всем отрезке [a, b], то составляющие этой функции x(t), y(t), z(t) также дифференцируемы всюду на [a, b] и при всех t справедливо равенство r0 (t) = x0 (t)i + y 0 (t)k + z 0 (t)k. Приведем основные формулы операций с дифференцированием векторфункций: 1. dtd (λ1 r1 + λ2 r2 ) = λ1 drdt1 + λ2 drdt2 , где λ1 , λ2 — некоторые постоянные числа; 2. dtd (r1 , r2 ) = ( drdt1 , r2 ) + (r1 , drdt2 ); 3. dtd [r1 , r2 ] = [ drdt1 , r2 ] + [r1 , drdt2 ]. Пусть на отрезке [a, b] задана вектор-функция r(t). Разобьем промежуток [a, b] точками a = t0 < t1 < ... < tn = b и пусть λ = max (ti+1 − ti ). Составим 0≤i≤n−1 Pn−1 интегральную сумму σn = i=0 r(τi ) 4 ti , где 4ti = ti+1 − ti и τi ∈ [ti , ti+1 ]. 8 Будем говорить, что вектор-функция r(t) интегрируема на [a, b], если существует предел интегральных сумм σn при λ → 0. Этот предел будем называть определенным интегралом от вектор-функции r(t) и обозначать так: Zb r(t)dt. a Теорема 1.2. Всякая непрерывная вектор-функция интегрируема. Более того, справедлива формула Zb Zb r(t)dt = i a Zb x(t)dt + j a Zb y(t)dt + k a z(t)dt. a Теорема 1.3. Пусть функция r(t) имеет непрерывную производную, тогда справедлива формула Ньютона-Лейбница Zb R(b) − R(a) = r(t)dt. a Мы будем говорить, что вектор-функция r(t), заданная на отрезке [a, b], k раз непрерывно-дифференцируема (k ≥ 1), если вектор-функция r(t) имеет на [a, b] непрерывные производные до порядка k включительно. Совокупность k раз непрерывно-дифференцируемых вектор-функций на отрезке [a, b] мы будем обозначать C(k) [a, b], а совокупность k раз непрерывно дифференцируемых скалярных функций будем обозначать C (k) [a, b]. Иногда, если указание отрезка [a, b] не нуждается в особом подчеркивании, будем применять более краткие обозначения: C(k) и C (k) . 9 Теорема 1.4. Для вектор-функции r(t) ∈ C(k) справедлива следующая формула Тейлора: 4r = r0 (t0 ) 4 t + 1 00 1 r (t0 )(4t)2 + ... + r(n) (t0 )(4t)n + ε(t0 , ∆t)(∆t)n , 2! n! где 4r = r(t0 + 4t) − r(t0 ), t0 , t0 + 4t ∈ [a, b], lim |ε(t0 , 4t)| = 0. 4t→0 Справедливость теоремы 1.4 непосредственно вытекает из формул Тейлора для скалярных функций x(t), y(t), z(t), являющихся составляющими векторфункции r(t). Аналогичным образом для векторных функций от нескольких скалярных аргументов вводятся понятия предела, непрерывности, частных производных и т.д. Мы не будем останавливаться на этом более подробно, так как принципиальных отличий по сравнению с функциями одного переменного здесь нет. 10 2. Путь Пусть на отрезке [a, b] задана непрерывная вектор-функция r(t). С помощью вектор-функции r(t) можно рассмотреть некоторое отображение отрезка [a, b] в пространство R3 , если каждому числу t ∈ [a, b] ставить в соответствие точку M (t) — конец вектора r(t). Мы будем говорить, что это отображение, порожденное функцией r(t), определяет в пространстве некоторый путь l. Функцию r(t) часто называют параметрическим представлением пути l. Путь l будем называть регулярным, если определяющая его векторфункция r(t) ∈ C(k) [a, b], и всюду на [a, b] : r0 (t) 6= 0 (k ≥ 1), Если k = 1, то путь l также называют гладким. Совокупность регулярных путей, порожденных k раз непрерывно дифференцируемыми вектор-функциями, будем обозначать P (k) . Два регулярных пути l и m будем называть эквивалентными, если для определяющих их вектор-функций r(t) ∈ C(k) [a, b] и g(τ ) ∈ C(k) [α, β] существует функция, ставящая в соответствие каждому значению τ значение t(f (τ ) = t) такая, чтоЖ а) f (τ ) ∈ C (k) [a, b], т.е. k раз непрерывно дифференцируема; б) f (α) = a и f (β) = b; в) при любом τ ∈ [a, b]: f 0 (τ ) 6= 0. г) при любом τ ∈ [α, β] справедливо соотношение r(f (τ )) = g(τ ). Замечание. В приведенном выше определении эквивалентности путей не обязательно a < b и α < β. Поэтому условие а) означает лишь, что между отрезками [a, b] и [α, β] есть k раз непрерывно дифференцируемое взаимнооднозначное соответствие. Из условия в) следует, что всюду на [α, β] имеем: f 0 (τ ) > 0 или f 0 (τ ) < 0. 11 Приведем простые примеры эквивалентных и не эквивалентных путей. Пример 2.1. Путь l определяется вектор-функцией r(t) = (cos t)i + (sin t)j, 0 ≤ t ≤ 4π. Путь m определяется вектор-функцией g(τ ) = (cos 2τ )i + (sin 2τ )j, 2π ≤ τ ≤ 4π. Оба пути l и m (см. рис 2) представляют собой дважды проходимую против часовой стрелки окружность с центром в начале координат и единичным радиусом. y y t r x O x O m l Рис. 2 Оба пути регулярны. Связь между отрезками [0, 4π] и [2π, 4π] устанавливается с помощью функции f (τ ) = 2τ − r0 pi = t, при этом f (2π) = 0, f (4π) = 4π, f 0 (τ ) = 2 > 0. Функция f (τ ) имеет производные всех порядков. Далее, при любом τ ∈ [2π, 4π] имеем: r(t) = r(2τ − 4π) = cos(2τ − 4π)i + sin(2τ − 4π)j = (cos 2τ )i + (sin 2τ )j = g(τ ). Итак, пути l и m эквивалентны. 12 Пример 2.2. Пусть l — путь, рассмотренный в примере 2.1., а n — путь, заданный вектор-функцией −1 ≤ τ ≤ 1. h(τ ) = [cos(arccos)τ ]i + [sin(arccos)τ ]j, y n x O Рис. 3 Тогда при изменении τ от −1 до +1 arccos τ изменяется в пределах от π до 0 и путь n представляет собой верхнюю половину окружности, изображенной на рис. 3, проходимую в направлении по часовой стрелке. Очевидно, что пути l и n не эквивалентны. 13 3. Кривая Будем говорить, что два регулярных пути l ∈ P (k) и m ∈ P (k) определяют одну и ту же регулярную кривую L, если эти пути эквивалентны. Векторфункция r = r(t), порождающая путь l называется параметрическим представлением кривой L, или просто ее параметризацией. Таким образом, каждую регулярную кривую можно задать указанием какой-либо одной ее конкретной параметризации. Переходу от одной параметризации кривой L к другой соответствует переход от одного пути к другому. Поясним на примере 2.1. наглядный смысл определения кривой. Оба пути l и m, которые там рассматривались, определяли на плоскости xOy дважды повторенную окружность. Пути l и m были эквивалентны. Следовательно, это две различные параметризации одной и той же кривой — дважды повторенной окружности. Различие между этими параметризациями в том, что при второй параметризации точка движется по кривой в два раза быстрее. Можно было бы взять также и другую параметризацию нашей кривой так, чтобы точка на ней двигалась в три раза быстрее и притом в обратном направлении. Приведенные соображения раскрывают смысл определения кривой. Если рассматривать пути, порожденные различными вектор-функциями, то их можно трактовать как траектории движения материальных точек, учитывая при этом скорость и направление движения по траектории. Если отвлечься от скорости и направления движения и изучать лишь чисто геометрические свойства траектории, то мы и придем к понятию кривой. Выше это было сделано с помощью понятия эквивалентных путей. Именно, отождествляя между собой эквивалентные регулярные пути, мы исключаем из рассмотрения «механические» свойства путей и изучаем их общие геометрические свойства, которые как раз и являются свойствами кривой. Пусть l и m — два регулярных, эквивалентных пути, порождаемые соответственно вектор-функциями r(t) ∈ C(k) [a, b] и g(τ ) ∈ C(k) [α, β]. Связь между параметрами t и τ : t = f (τ ), сопоставляет между собой точки M (t) и 14 N (τ ) путей l и m. Точки M (t) и N (τ ) будем называть соответствующими. Из определения эквивалентных путей следует, что соответствующие точки в пространстве совпадают. В классе эквивалентных регулярных путей точки, лежащие на разных путях, естественно объединяются в совокупности соответствующих точек, причем каждой такой совокупности в пространстве отвечает единственная точка. Эта точка и принимается за точку кривой L, для которой рассмотренные выше эквивалентные регулярные пути являются всевозможными параметризациями. 15 4. Касательная Пусть l — регулярный путь, порожденный вектор-функцией r = r(t) ∈ C(k) [a, b]. Напомним, что r0 (t) 6= 0 всюду на [a, b]. Пусть X(t0 ) и X(t) — точки l, отвечающие значениям параметра t0 и t. На прямой, проходящей через точки X(t0 ) и X(t), выберем направление, совпадающее с направлением вектора X(t0 )X(t), если t0 < t, и совпадающее с направлением X(t)X(t0 ), если если t0 > t. Полученную в результате ось назовем направленной секущей пути l в точке X(t0 ). Направленной касательной к пути l в точке X(t0 ) называется предел направленных секущих (рис. 4). z X(t0 ) X(t) r(t0 ) r(t) y O x Рис. 4 Теорема 4.1. В каждой точке регулярного пути существует направленная касательная. Доказательство. Пусть X(t0 ) — произвольная фиксированная точка регулярного пути l, а X(t) — переменная точка того же пути. Рассмотрим вектор r(t) − r(t0 ) g(t) = . t − t0 16 Легко видеть, что вектор g(t) лежит на направленной секущей, проходящей через точки X(t0 ) и X(t), и имеет с ней одинаковое направление. Далее, r(t) − r(t0 ) = r0 (t0 ) 6= 0. t→t0 t − t0 lim g(t) = lim t→t0 Отсюда следует, что в точке X(t0 ) существует направленная касательная к l, которая определяется в пространстве вектором r0 (t0 ) (рис. 5). z X(t0 ) r0 (t0 ) r(t0 ) t y O x Рис. 5 Если через X, Y, Z обозначим текущие координаты точки на направленной касательной к гладкому пути l в точке X(t0 ), то канонические уравнения касательной будут иметь вид: X − x(t0 ) Y − y(t0 ) Z − z(t0 ) = = , x0 (t0 ) y 0 (t0 ) z 0 (t0 ) здесь x(t), y(t), z(t) — составляющие вектор-функции r(t). Теорема 4.2. У двух эквивалентных регулярных путей в соответствующих точках направленные касательные совпадают или имеют противоположные направления. Доказательство. Пусть даны эквивалентные регулярные пути l : r = = r(t) ∈ C(k) [a, b] и m : g = g(τ ) ∈ C(k) [α, β] и пусть функция 17 f (τ ) ∈ C (k) [α, β](f (τ ) = t) осуществляет связь между соответствующими точками этих путей. Тогда при всех τ ∈ (α, β) имеем: f 0 (τ ) 6= 0 и r(f (τ )) = g(τ ). Отсюда rt0 (f (τ ))f 0 (τ ) = g 0 (τ ), и для соответствующих точек путей l и m имеем: rt0 (f (τ )) = f 01(τ ) g 0 (τ ). Так как f 0 (τ ) на [α, β] сохраняет постоянный знак, то одновременно во всех парах соответствующих точек l и m направленные касательные либо совпадают, либо направлены в противоположные стороны. Прямая, которая получается из направленной касательной в точке X(t0 ) к пути l (отбрасыванием направления), называется касательной к пути l в точке X(t0 ). Из теоремы 4.2. вытекает важное следствие: у эквивалентных регулярных путей в соответствующих точках касательные совпадают. Пусть L — регулярная кривая и A — некоторая точка этой кривой. Пусть далее регулярный путь l : r = r(t) ∈ P (k) есть параметризация L и t = t0 — значение параметра, соответствующее точке A кривой L. Касательной к L в точке A называется касательная к пути l в точке X(t0 ). Так как у эквивалентных регулярных путей касательные в соответствующих точках совпадают, то данное определение корректно. 18 5. Длина пути Рассмотрим в пространстве путь l, который порождается непрерывной вектор-функцией r = r(t), a ≤ t ≤ b. Разобьем отрезок [a, b] точками a = t0 < t1 < ... < tn = b. Число λ = max (ti+1 − ti ) 0≤i≤n−1 назовем рангом разбиения. Обозначим через X(ti ) точку пути l, являющуюся концом вектора r(ti ) (рис. 6). Пусть Ln — ломаная, последовательные вершины которой лежат в точках X(t0 ), X(t1 ), ..., X(tn ). Такую ломаную будем называть вписанной в путь l. Через s(Ln ) обозначим длину ломаной Ln . Длиной s(l) пути l будем называть предел длин, вписанных в этот путь ломаных, при условии, что ранг разбиения стремится к нулю. Другими словами s(l) = lim s(Ln ). λ→0 X(tn ) X(t1 ) X(tn−1 ) X(t0 ) r(t1 ) r(tn ) r(t0 ) O Рис. 6 19 Теорема 5.1. Всякий регулярный путь l имеет определенную длину. Более того, если регулярный путь l задан вектор функцией r = r(t) ∈ C(k) [a, b], то справедлива формула Zb s(l) = Zb q x02 (t) + y 02 (t) + z 02 (t)dt. ||r0 (t)||dt = a a Доказательство. Произведем разбиение отрезка [a, b] a = t0 < t1 < ... < tn = b, и пусть λ — ранг этого разбиения. Строим ломаную Ln по указанному разбиению. Тогда s(Ln ) = n−1 X X(ti )X(ti+1 ) = i=0 n−1 X r(ti+1 ) − r(ti ) . i=0 Здесь для вектора AB символ ||AB|| — обозначает длину вектора AB. Пусть x(t), y(t), z(t) — составляющие вектор-функции r(t)1 . Тогда n−1 p X s(Ln ) = [x(ti+1 ) − x(ti )]2 + [y(ti+1 ) − y(ti )]2 + [z(ti+1 ) − z(ti )]2 . i=0 Применим к каждой из разностей, стоящих в скобках под знаком радикала, теорему Лагранжа о среднем значении2 : x(ti+1 ) − x(ti ) = x0 (ξi )∆ti , y(ti+1 ) − y(ti ) = y 0 (ηi )∆ti , z(ti+1 ) − z(ti ) = x0 (ζi )∆ti ; 1 Так как путь l регулярный, то функции x(t), y(t), z(t) ∈ C (k) , и при всех t ∈ [a, b] имеем: 2 2 2 x0 (t) + y 0 (t) + z 0 (t) > 0. 2 Теорема Лагранжа о среднем значении: Если функция f непрерывна на отрезке [a, b] и дифференцируема в интервале (a, b), то найдется такая точка c ∈ (a, b), что f (b) − f (a) = f 0 (c)(b − a). 20 через ξi , ηi , ζi обозначены точки отрезка [ti , ti+1 ], а через ∆ti разность ti+1 − ti . Отсюда n−1 q X s(Ln ) = x02 (ξi ) + y 02 (ηi ) + z 02 (ζi )∆ti . i=0 Положим Zb I= ||r0 (t)||dt. a Тогда ti+1 Zb p n−1 Z p 2 X 2 2 2 0 0 0 x + y + z dt = x0 + y 02 + z 02 dt = I= i=0 t i a n−1 q X = x02 (τi ) + y 02 (τi ) + z 02 (τi )∆ti , i=0 где τi — некоторая точка отрезка [ti , ti+1 ]. Имеем: n−1 q q X 2 2 2 2 2 2 s(Ln )−I = | x0 (ξi ) + y 0 (ηi ) + z 0 (ζi )− x0 (τi ) + y 0 (τi ) + z 0 (τi ) ∆ti | ≤ i=0 2 2 2 2 2 2 n−1 X |x0 (ξi ) − x0 (τi )| + |y 0 (ηi ) − y 0 (τi )| + |z 0 (ζi ) − z 0 (τi )| p 2 p 2 ≤ . 0 (ξ ) + y 02 (η ) + z 02 (ζ ) + 0 (τ ) + y 02 (τ ) + z 02 (τ ) x x i i i i i i i=0 Оценим прежде всего снизу знаменатель в каждом слагаемом правой части последнего неравенства. Для этого заметим, что непрерывная функция q 0 ||r (t)|| = x02 (t) + y 02 (t) + z 02 (t) при всех t ∈ [a, b] отлична от нуля. Поэтому, из теоремы Вейерштрасса3 вытекает, что r0 = inf |r0 (t)| = |r0 (t0 )| > 0. [a,b] Отсюда при всех i = 0, 1, 2, ..., n − 1 имеем: q q 2 2 2 0 0 0 x (ξi ) + y (ηi ) + z (ζi ) + x02 (τi ) + y 02 (τi ) + z 02 (τi ) ≥ r0 . 3 Теорема Вейерштрасса: Если функция f непрерывна на отрезке [a, b], то она ограничена на нем и достигает своих минимального и максимального значений. 21 2 2 2 Далее, функции x0 (t), y 0 (t), z 0 (t) непрерывны на [a, b], поэтому по теореме Кантора4 они равномерно непрерывны на [a, b]. Зададим теперь произвольно ε > 0. Тогда существует такое δ > 0, что для любых t0 , t00 ∈ [a, b], удовлетворяющих соотношению |t0 − t00 | ≤ δ, справедливы неравенства: εt0 2 2 , x0 (t0 ) − x0 (t00 ) ≤ 3(b − a) εt0 2 2 y 0 (t0 ) − y 0 (t00 ) ≤ , 3(b − a) εt0 2 2 z 0 (t0 ) − z 0 (t00 ) ≤ . 3(b − a) Возьмем теперь достаточно мелкое разбиение отрезка [a, b]. Пусть ранг разбиения условию λ < δ. Тогда для всех вписанных в путь l ломаных Ln , построенных по таким разбиениям, получим: |s(Ln ) − I| < ε. Отсюда I = lim s(Ln ). λ→0 Следовательно, Zb s(l) = a Zb q ||r0 (t)||dt = x02 (t) + y 02 (t) + z 02 (t)dt. a 4 Теорема Кантора: Функция, непрерывная на отрезке, равномерно непрерывна на нем. 22 6. Длина кривой Теорема 6.1. Длины всех эквивалентных между собой регулярных путей равны. Доказательство. Пусть l и m — два эквивалентных регулярных пути, которые соответственно задаются вектор-функциями l : r = r(t) ∈ C(k) [a, b], и m : g = g(τ ) ∈ C(k) [α, β] и α ≤ τ ≤ β. Пусть, далее, функция f (τ ) = t осуществляет связь между параметрами t и τ , причем f (α) = a, f (β) = b, f 0 (τ ) 6= 0 и r(f (τ )) = g(τ ). Разберем сначала случай, когда a ≤ t ≤ b. Тогда, очевидно, всюду на [α, β] имеем: f 0 (τ ) > 0. Из соотношения r(f (τ )) = g(τ ) после дифференцирования имеем: dr 0 dg f (τ ) = . dt dτ Отсюда dr 0 f (τ ) = dt dg , dτ и так как f 0 (τ ) > 0, то dg = dτ На основании теоремы 5.1. имеем: Zβ s(m) = α dg || ||dτ = dτ Zβ dr 0 f (τ ). dt dr || ||f 0 (τ )dτ = dt α Zb || dr ||dt = s(l). dt a Пусть теперь a ≥ t ≥ b. Тогда функция f 0 (τ ) строго отрицательна на [α, β]. В этом случае Zb s(l) = ||r0 (t)||dt. a Дифференцируя тождество r(f (τ )) = g(τ ), имеем: dr 0 dg f (τ ) = . dt dτ 23 Так как f 0 (τ ) < 0, то Zβ s(m) = α Zb Za dg dr dr || ||dτ = − || ||f 0 (τ )dτ = || ||dt = s(l). dτ dt dt a b Дадим теперь определение длины кривой. Длиной регулярной кривой L называется длина любого регулярного пути, характеризующего эту кривую. 24 7. Естественный параметр кривой Как мы знаем, одну и ту же кривую можно задать с помощью бесконечного множества различных параметризаций, причем параметр, как правило, не имеет прямого геометрического смысла. В этом параграфе для каждой гладкой кривой будет введена специальная параметризация, тесно связанная с геометрическими свойствами кривой. В качестве такого параметра будет выбрана длина переменной дуги на кривой. Пусть L — регулярная кривая. Рассмотрим ее произвольную параметризацию, которая задается вектор-функцией r = r(t) ∈ C(k) [a, b]. Напомним, что r0 (t) 6= 0 при всех t ∈ [a, b]. Пусть l — регулярный путь, порожденный вектор-функцией r(t). Обозначим через lt регулярный путь, заданный той же вектор-функцией r(t), но на отрезке [a, t]. lt будем называть дугой пути l. Обозначим через s(t) длину дуги l(t). Тогда по теореме 5.1. будем иметь: Zt ||r0 (t)||dt. s(t) = a Теорема 7.1. Функция s(t) обладает следующими свойствами: 1. s(t) ∈ C (k) [a, b], 2. s0 (t) > 0 на [a, b], тем самым, s(t) — строго возрастающая функция. Доказательство. Из формулы Zt s(t) = ||r0 (t)||dt a вытекает непосредственно, что s0 (t) = ||r0 (t)|| и s(t) ∈ C (k) [a, b]. Так как l — регулярный путь, то при всех t ∈ [a, b] s0 (t) > 0. 25 Область значений функции s(t) есть отрезок [0, S], где S = s(L). Из теоремы 7.1. вытекает, что функция s = s(t) имеет обратную t = t(s), которая задана на отрезке [0, S], k раз непрерывно дифференцируема, строго возрастает и dt 1 1 = ds = 0 > 0. ds |r (t)| dt Теорема 7.2. На отрезке [0, S] рассмотрим вектор-функцию R(s) = r(t(s)). Тогда эта вектор-функция порождает регулярный путь γ, эквивалентный пути l. Доказательство. Действительно, функция t = t(s) такова, что: 1. t(s) ∈ C (k) [0, S]; 2. t(0) = a и t(S) = b; 3. при всех s ∈ [0, S]: dt 1 = 0 > 0. ds ||r (t)|| Далее, dR dr dt = · 6= 0. ds dt ds Поэтому R(s) задает регулярный путь γ. Так как r(t(s)) = R(S), то регулярные пути l и γ эквиваленты. Теорема 7.3. Имеет место соотношение dR ds = 1. . Доказательство. Действительно, dR ds = dr dt · dt ds = |r0 (t)| dt ds = ||r0 (t)|| 1 = 1. |r0 (t)| Обратим внимание, что r0 (t) — это вектор-функция, а ds dt — это скалярная функция. В данном случае мы воспользовались свойством нормы: 26 → → → ||α x|| = |α||| x||, где x ∈ Rs , а α ∈ R1 . Параметр s имеет прямой геометрический смысл — он является длиной переменной дуги пути l. Перейдем теперь к рассмотрению исходной кривой L. Заметим, что путь γ эквивалентен любой параметризации кривой K. Отныне с каждой регулярной кривой L связана вполне определенная параметризация R = R(s), и параметр s, это длина переменной дуги на L. Один из концов дуги фиксирован и совпадает с начальной точкой кривой. Во всем дальнейшем изложении мы будем пользоваться этой специальной параметризацией. Параметр s называют естественным параметром кривой, а вектор-функцию R = R(s) естественной параметризацией кривой L. 27 8. Касательная как прямая наилучшего локального приближения кривой Пусть L — регулярная кривая. Как уже было сказано выше такую кривую мы будем отождествлять с ее естественной параметризацией R = R(s). Параметр s изменяется в пределах от 0 до S, где S — длина L. Точки кривой L — это концы радиус вектора R(s). Их будем обозначать через X(s). Очевидно, что длина дуги кривой L с концами в точках X(0) и X(s) равна s. Открытой дугой с концами X(s1 ) и X(s2 ) будем называть множество точек X(s), для которых s ∈ (s1 , s2 ). Пусть s0 — внутренняя точка отрезка [0, S]. Окрестностью точки X(s0 ) на кривой L будем называть любую открытую дугу L, содержащую эту точку. Несколько иначе определяются окрестности концов кривой L — точек X(0) и X(S). Окрестностями этих точек объявляются множества точек кривой L, для которых параметр s соответственно принадлежит [0, s1 ) или (s2 , S]. Мы будем говорить, что для кривой L некоторое свойство выполняется локально, если это свойство выполнено в некоторой окрестности любой точки кривой. a m ha (∆s) A(s + ∆s) X(s0 + ∆s) X(s0 ) L R(s0 ) ∆R R(s0 + ∆s) O Рис. 7 28 Пусть X(s0 ) — произвольная точка регулярной кривой L. Проведем через точку X(s0 ) любую прямую a (рис. 7). Из точки X(s0 + ∆s), лежащей на L, опустим перпендикуляр на a и пусть A(s0 + ∆s) — основание этого перпендикуляра. Длину отрезка X(s0 + ∆s) A(s0 + ∆s) обозначим ha (∆s) и будем называть отклонением прямой a от кривой L в точке X(s0 ). Найдем формулу для ha (∆s). Пусть m — единичный вектор, лежащий на a. Тогда если ∆R = R(s0 + ∆s) − R(s0 ), то ha (∆s) = |[m, ∆R]|. Для ∆R напишем разложение по формуле Тейлора до членов первого порядка включительно ∆R = R0 (s0 )∆s + ε(s0 , ∆s)∆s, здесь |ε(s0 , ∆s)| → 0, при ∆s → 0. Отсюда ha (∆s) = [m, R0 (s0 )]∆s + [m, ε(s0 , ∆s)]∆s и, следовательно, главной частью отклонения h(∆s) является выражение [m, R0 (s0 )] · ∆s . a0 A(s0 + ∆s) t X(s0 ) ∆R L R(s0 ) X(s0 + ∆s) R(s0 + ∆s) O Рис. 8 29 Пусть теперь a0 — касательная к L в точке X(s0 ) и t — единичный вектор этой касательной (рис. 8). Так как R(s0 ) лежит на прямой a0 и согласно теореме 7.3. |R0 (s0 )| = 1, то можно считать, что t = R0 (s0 ). Но тогда ha0 (∆s) = [t, t]∆s + ∆s[t, ε(s0 , ∆s)] = ∆s · [ε(s0 , ∆s), t] . Так как только для касательной выражение [m, R0 (s0 )] = 0, то отклонение ha0 (∆s) имеет наибольший порядок малости тогда и только тогда, когда прямая a есть касательная. Отсюда ясно, что в достаточно малой окрестности точки X(s0 ) прямой наилучшего приближения к L является касательная к L в точке X(s0 ). Более подробно это означает, что если дуга X1 X2 кривой L, взятая в качестве окрестности точки X(s0 ) (рис. 9), имеет достаточно малую длину, то среди всех отрезков AB наилучшим образом приближает дугу X1 X2 отрезок касательной A0 B0 . Через A1 и B1 здесь обозначены проекции точек X1 и X2 на прямую a, а через A0 и B0 проекции тех же точек на касательную a0 . a A0 X(s0 ) B0 a0 A1 X1 X2 B1 L Рис. 9 30 В соответствии c введенной терминологией можно сказать, что касательная есть прямая наилучшего локального приближения регулярной кривой в любой ее точке. 31 9. Кривизна и главная нормаль Для того, чтобы охарактеризовать степень отличия кривой от прямой линии, удобно ввести в рассмотрение скорость вращения касательной при перемещении вдоль кривой. Прямая во всех точках имеет одну и ту же касательную, совпадающую с ней самой. Поэтому при перемещении вдоль прямой скорость вращения касательной равна нулю. Отсюда ясно, что чем больше скорость вращения касательной при перемещении вдоль кривой, тем больше кривая по своей пространственной форме отличается от прямой. t(s0 ) t(s0 ) X(s0 ) ϕ t(s0 + ∆s) X(s0 + ∆s) t(s0 + ∆s) Рис. 10 Пусть L — регулярная кривая и R = R(s) — ее естественная параметризация. Начиная с этого параграфа, будем считать, что вектор-функция R(s) по крайней мере дважды непрерывно дифференцируема. Возьмем на L произвольную точку X(s0 ) и зафиксируем ее. Пусть X(s0 + ∆s) — переменная точка L (Рис. 10). Вектор функция t(s) = R0 (s) по крайней мере один раз непрерывно дифференцируема и согласно теореме 7.3. при всех s |t(s)| = 1, т.е. t(s) есть единичный касательный вектор к L в точке X(s). Обозначим через ϕ угол между векторами t(s0 ) и t(s0 + ∆s). Отметим, что угол ϕ берется в пределах от 0 до π. 32 Число ϕ κ = lim , s→0 s где s = ∆s — длина дуги L с концами X(s0 ) и X(s0 + ∆s), называется кривизной кривой L в точке X(s0 ). Так как скорость вращения касательной при перемещении вдоль кривой L dt задается длинной вектора ds , то нашей ближайшей задачей является установление в любой точке кривой L равенства dt ds κ= (9.1). Допустим, что соотношение (9.1) уже установлено и в точке X(s0 ) кривизна κ отлична от нуля. Тогда dt(s0 ) 6= 0. ds 0) Обозначим через n орт вектора dt(s ds . Ниже будет доказано, что вектор n ортогонален касательной t(s0 ). Он называется главной нормалью L в точке X(s0 ). Отметим, что главная нормаль определена лишь в тех точках кривой, где кривизна отлична от нуля. По определению, кривизна есть неотрицательная функция точки кривой. Теорема 9.1. Для любой регулярной кривой L в каждой точке существует кривизна κ и имеет место равенство κ= dt ds = d2 R . ds2 В тех точках L, где κ 6= 0, определена главная нормаль и справедлива формула dt = κn, (9.2) ds при этом векторы t и n ортогональны. Формула (9.2) называется первой формулой Френе. 33 Заметим, что если R = R(s) — естественная параметризация L, то как было указано выше, вектор-функция R(s) по крайней мере дважды непрерывно дифференцируема. Доказательство теоремы опирается на две леммы. Лемма 9.1. Пусть вектор-функция h = h(t) непрерывно дифференцируема и ||h(t)|| = const. Тогда векторы h(t) h0 (t) ортогональны. Доказательство. Имеем: (h(t), h(t)) = ||h(t)||2 = const. Дифференцируя это тождество, получим: 2(h(t), h0 (t)) = 0. Отсюда и следует утверждение леммы. Лемма 9.2. Пусть h(t) — вектор-функция единичной длины. Тогда угол между векторами h(t + ∆t) и h(t) эквивалентен длине вектора ∆h = h(t + ∆t) − h(t). Доказательство. A h(t) ∆h ϕ B O h(t + ∆t) Рис. 11 Треугольник OAB (рис.11) равнобедренный. Поэтому ϕ ||AB|| = 2||OA|| sin . 2 Так как ||OA|| = ||h(t)|| = 1, 34 ||AB|| = ||∆h||. Отсюда ϕ ||∆h|| = 2 sin , 2 и, поскольку 2 sin ϕ2 эквивалентен ϕ, имеем: ||∆h|| ∼ ϕ. Лемма доказана. Приступим к доказательству теоремы 9.1. Прежде всего докажем существование кривизны κ и установим равенство κ= dt . ds Имеем: ∆t dt . = lim ds ∆s→0 ∆s По условию леммы 9.2. угол ϕ между векторами t(s + ∆s) и t(s) длине приращения ||∆t|| единичного вектора касательной t(s), значит ϕ ∼ ||∆t|| = ||t(s + ∆s) − t(s)||. Далее, dt ds = lim ∆s→0 dt ds ϕ = κ. ∆s→0 ||∆s|| = lim 0) Пусть теперь в точке X(s0 ) κ 6= 0. Обозначим через n орт вектора dt(s ds . Тогда dt dt = n = κn, ds ds dt перпендикулярен t. Следовательно, главная нормаль и по лемме 9.1. вектор ds n перпендикулярна касательной. Таким образом, если L задана с помощью естественной параметризации R = 2 R(s), то κ = ddsR2 . Рассмотрим случай, когда L задана с помощью произвольной параметризации r = r(t) ∈ C (k) [a, b] (k ≥ 2). 35 Теорема 9.2. Пусть r = r(t) ∈ C (k) [a, b] (k ≥ 2) — параметризация регулярной кривой L. Тогда для ее кривизны справедлива формула 2 ||[ ddt2r , dr dt ]|| . κ= 3 || || dr dt Доказательство. Пусть t = t(s) ∈ C (k) [0, S] — функция, выражающая связь между параметром t и естественным параметром s кривой L. Тогда R(s) = r(t(s)). Отсюда dR dr dt = · ds dt ds и 2 d2 R d2 r dt dr d2 t = 2 + . ds2 dt ds ds ds2 Поэтому 2 2 3 d R dR d r dr dt , = , · . ds2 ds dt2 dt ds 2 d R Поскольку векторы dR ds и ds2 ортогональны и d2 R =κ ds2 dR = 1, ds (см. теорему 9.1), то 2 2 d R dR d r dr dt κ= , = , · ds2 ds dt2 dt ds Но Zt s(t) = 3 . dr dt. dt a Поэтому dt ds 1 = || dr || и, следовательно, dt 2 d r dr dr κ= , · dt2 dt dt −3 . 36 10. Плоские кривые. Этот пункт посвящен понятию кривизны для плоских кривых. Не нарушая общности, можно считать, что плоскость, в которой лежат кривые, совпадает с плоскостью xOy. Таким образом, если L — плоская регулярная кривая и r = r(t) ∈ Ck [a, b], (k ≥ 2) — некоторая ее параметризация, и r(t) = x(t)i+y(t)j. Отсюда, для кривизны прямой L имеем формулу: ||x00 (t)y 0 (t) − y 00 (t)x0 (t)|| κ= . [x02 (t) + y 02 (t)]3/2 Пример. Пользуясь этой формулой, найдем кривизну окружности радиуса R. Удобно воспользоваться следующим параметрическим представлением окружности: ( x = R cos(t), 0 ≤ t ≤ 2π. y = R sin(t), Тогда ||x00 y 0 − y 00 x0 || R2 1 κ= = . 2 2 3/2 = 3 0 0 R R (x + y ) Итак, кривизна окружности во всех точках одинакова и равна R1 , где R — радиус окружности. В случае, если параметр t совпадает с одной из координат, например t = x, и кривая L задается явным уравнением y = y(x), для кривизны κ имеет место формула ||y 00 || κ= . (1 + y 02 )3\2 Для кривых L, которые могут быть заданы с помощью параметризации r(x) = xi + y(x)j, x 0 ≤ x ≤ x1 , где y(x) ∈ C (k) , k ≥ 2, полезно ввести понятие кривизны со знаком. (Отметим, чтоpусловие r0 (x) 6= 0 для таких кривых выполнено всегда, поскольку ||r0 (x)|| = 1 + y 02 ≥ 1 > 0). 37 y t0 L X0 t X α0 α O x x0 x Рис. 12 Пусть t и t0 — касательные к кривой L в точках X и X 0 (рис. 12) и пусть между абсциссами x и x0 справедливо неравенство x < x0 . Обозначим через k и k 0 угловые коэффициенты касательных t и t0 . Тогда k = y 0 (x), k 0 = y 0 (x0 ). Пусть α и α0 — углы, которые образуют касательные t и t0 с положительным направлением оси Ox. Тогда α = arctg y 0 (x), α0 = arctg y 0 (x0 ). Ориентированным углом между касательными к L в точках x и x0 назовем угол5 ϕ̃ = α0 − α. Кривизной L со знаком в точке X называется число ϕ̃ , X →X s κ̃ = lim 0 где s — длина дуги XX 0 . Очевидно, что κ = |κ̃|. Докажем, что κ̃ = y 00 . (1 + y 02 )3/2 В рассматриваемом случае важно, что x < x0 . Если же x > x0 , то полагаем ϕ = α − α0 . Ниже рассматриваются оба случая. 5 38 Действительно, полагая x0 = x + ∆X, имеем: ϕ̃ = α0 − α = ∆α, x+∆x Z s= p 1 + y 02 dx. x Поэтому ∆α ∆α p = lim = κ = lim R x+∆x p R x+∆x ∆x 2 0 0 1 0 dx 02 dx X →X X →X 1 + y 1 + y x ∆x x d(arctg y 0 ) =p = p dx 2 . 2 1 + y0 1 + y0 ∆α ∆x Отсюда y 00 κ̃ = . (1 + y 02 )1\2 II. Выпуклые и вогнутые кривые. Пусть L — регулярная кривая, заданная параметризацией ( x = x, y = f (x), где f (x) ∈ C (k) [a, b], (k ≥ 2). Кривая L называется выпуклой, если она целиком лежит над каждой своей касательной (рис. 13). y x O Рис. 13 39 Кривая L называется вогнутой, если она целиком расположена под каждой своей касательной (рис. 14). y x O Рис. 14 Теорема 9.3. Для того чтобы кривая L была выпуклой, необходимо и достаточно, чтобы во всех ее точках кривизна со знаком κ̃ была неотрицательна. Теорема 9.4. Для того чтобы кривая L была вогнутой, необходимо и достаточно, чтобы во всех ее точках кривизна со знаком κ̃ была неположительна. Мы ограничимся доказательством теоремы 9.3. Теорема 9.4. доказывается аналогично, поэтому предлагаем читателю доказать ее самостоятельно в качестве упражнения. Доказательство теоремы 9.3. Для кривизны со знаком κ̃ имеет место формула f 00 (x) . κ̃ = (1 + f 02 (x))3/2 Поэтому необходимое и достаточное условие выпуклости кривой сводится к тому, что всюду на отрезке [a, b] f 00 ≥ 0. а) Проверка необходимости условия. 40 y X X0 t X̃ O a x0 ξ x b x Рис. 15 Пусть L — выпуклая кривая. Возьмем произвольную точку X0 на L и проведем в ней касательную t(Рис. 15). Пусть x0 — абсцисса точки X0 и x — любая точка отрезка [a, b]. Обозначим через X и X̃ точки, лежащие соответственной на кривой L и касательной t, имеющие x своей абсциссой. Если y и ỹ — ординат точек X и X̃, тоy = f (x) и ỹ = f 0 (x0 )(x − x0 ) + f (x0 ). Разложим f (x) по формуле Тейлора до членов второго порядка: 1 f (x) = f (x0 ) + f 0 (x0 )(x − x0 ) + f 00 (ξ)(x − x0 )2 , 2 где ξ — точка, лежащая между x0 и x. Так как X̃ лежит под X (кривая L выпуклая), то y ≥ ỹ, или в развернутом виде: 1 f (x0 ) + f 0 (x0 )(x − x0 ) + f 00 (ξ)(x − x0 )2 ≥ f (x0 ) + f 0 (x0 )(x − x0 ). 2 Отсюда f 00 (ξ) ≥ 0. Устремляя x к x0 , получим, что ξ стремится к x0 , и так как f 00 (x) — непрерывная функция, то f 00 (x) = lim f 00 (ξ) ≥ 0. ξ→x0 Так как точка x0 ∈ [a, b] взята произвольно, то всюду на [a, b] имеем f 00 (x) ≥ 0. б) Проверка достаточности условия. 41 y X X0 t X̃ O a x0 x b x Рис. 16 Пусть на кривой L всюду f 00 (x) ≥ 0. Возьмем на L произвольную точку X0 и проведем в ней касательную t. Пусть, далее, X и X̃ — точки на L и t, имеющие общую абсциссу x (рис. 16). Нам надо доказать, что для ординат y и ỹ этих точек выполнено неравенство y ≥ ỹ. В обозначениях, которые были использованы выше, имеем: y = f (x0 ) + f 0 (x0 )(x − x0 ) + 1f 00 (ξ)(x − x0 )2 , 2 ỹ = f (x0 ) + f 0 (x0 )(x − x0 ). Отсюда 1 y − ỹ = f 00 (ξ)(x − x0 )2 ≥ 0, 2 и мы получаем, что при всех x ∈ [a, b] : y ≥ ỹ. Следовательно, кривая L выпуклая. 42 11. Соприкасающаяся плоскость 43 Список литературы 44 Учебное издание Звягин Андрей Викторович Лекции по курсу «Дифференциальная геометрия» Учебное пособие Издано в авторской редакции Компьютерная верстка М.И. Струкова Подписано в печать ???2023. Формат ???????? Усл. печ. л. ???. Тираж 50 экз. Заказ ??? Издательский дом ВГУ 394018, г. Воронеж, пл. им. Ленина, 10 Отпечатано c готового оригинал-макета в типографии Издательского дома ВГУ 394018, г. Воронеж, ул. Пушкинская, 3