Цифровая
Обработка
Сигналов
(ЦОС)
Digital
Signal
Processing
(DSP)
Литература
1. Сато Ю. - Без паники! Цифровая обработка
сигналов,2010
2. А.Б.Сергиенко. Цифровая обработка
сигналов. – СПб.: Питер, 2003 г.
3. Лайонс Р. Цифровая обработка сигналов. пер.
с англ. под ред. Бритова А.А. – М.: Бином,
2006.
4. Айфичер Э.С, Джервис Б.У. Цифровая
обработка сигналов: практический подход, 2-е
издание .Пер. с англ. – М.: Издательский дом
«Вильямс», 2004
5. Рабинер Л., Гоулд Б.. Теория и применение
цифровой обработки сигналов. /пер. с англ. –
Мир, 1978
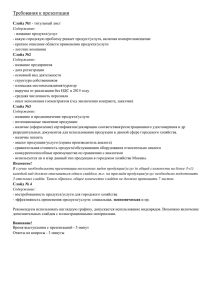
Использование ЦОС в сфере
телекоммуникаций
Основные области применения ЦОС
Связь
Кодирование речи
Военная техника
Распознавание речи
Спектральный
анализ
Синтезаторы
музыки
Верификация
диктора
Компенсаторы
эхо
Ультразвуковое
Засекреченная
оборудование
связь
Генерация
функций
Игрушки
и игры
Повышение
качествафильтрация
речи
Цифровая
Видео-конференц.
связь
Обработка
Диагностический
Радиолокация
инструментарий
Анализ
сейсмограмм
Робототехника
Цифровое
вещание
и телевидение
Общетехнические
Синтез
речи
Свертка
Модемы
изображений
Мониторинг
Обработка
больных
изображений
Цифровая
фильтрация
Цифровое
управление
……………………………………………..
Системы
“речь - текст”
Корреляция
Космическая
фотосъемка
Зрение
роботов
Цифровое
радио
Слуховые
Навигация
приборы
Синтез
моделей доступ
Засекреченный
Преобразование
Гильберта
Компрессия
данных
Компрессия
и
передача
Трансмультиплексоры
Протезирование
Радиомодемы
Временной
анализ
Контрольная
аппаратура для ЛЭП
изображений
Быстрое преобразование
Фурье
Анализ
измерений
космических
зондов
Сотовая
телефония
Управление
ракетами
Анализ
вибраций
Медицина
ОбработкаРадиотелескопы
речи
Распознавание
образов
Адаптивная
фильтрация
Интеллектуальные
мультиплексоры
Радиоразведка
Фазовая синхронизация
Повышение
качества
изображения
Генерация
сигналов
Адаптивные
корректоры
Гидроакустика
Трехмерные
вращения
Кодирование
- декодирование
Интерполяция
картами
ШифрованиеРабота
данныхс цифровыми
Космонавтика
Инструментарий
Пакетная коммутация
Другие
Широкополосная связь
Промышленность
ЦОС
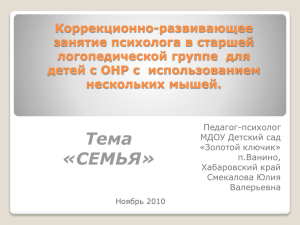
Примеры устройств ЦОС
Пример аналогового и цифрового устройств
Аналоговое устройство
+
Цифровое устройство
ФНЧ
ЦАП
АЦП
1010
1001
СПОСОБЫ РЕАЛИЗАЦИИ ЦОС
Сравнительная характеристика цифровой и
аналоговой обработки
Преимущества
•Повторяемость
(малочувствительны к старению, к
допускам точности компонентов, к
изменениям температуры)
•Высокая помехоустойчивость
•Большой динамический
диапазон
•Высокая точность
•Универсальность методов и
аппаратуры
•Гибкость (Возможность
программной перестройки)
•Высокая степень интеграции
Недостатки
•Большие требования к
быстродействию (ширине полосы
частот)
•Сложность методов и
аппаратуры
•Большая мощность
потребления энергии
•Наличие погрешностей
дискретизации и шумов
квантования
•Высокая скорость морального
старения
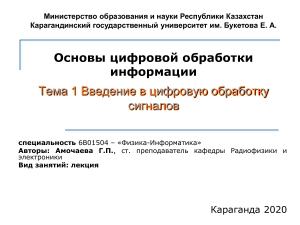
Непрерывные, дискретные и цифровые сигналы
Представление сигналов
Графически
y(t) В, y(n), ý(n)
1000, 8
0111, 7
0110, 6
Цифровой сигнал (квантование по
уровню и дискретизация по времени)
Непрерывный (аналоговый) сигнал
Дискретный сигнал
(дискретизация по времени)
q
1.
0011, 3
0010, 2
0001, 1
T
0.1
0.2
0.5
0.6
0.7
0.8
0.9 t, сек
1
2
5
6
7
8
9
n
T=1/fd – шаг дискретизации, fd- частота дискретизации, q –шаг квантования
0
• Текущая частота спектра отнесённая к частоте
Найквиста называется
нормированной и
обозначается как f . Нормированная частота
всегда лежит в интервале [0,..,0.5].
•
Такой подход позволяет частотный спектр
аналоговых сигналов изучать в постоянном
интервале f =0..0.5.
текущая _ частота _ аналогового _ сигнала
f
0...0.5.
частота _ дискретизации _ Найквиста
f
f
fT
fд
Теоретические основы цифровой обработки сигналов. Слайд 11
График температуры атмосферы за год
Синхронная фильтрация
Линейные системы с постоянными параметрами (ЛПП)
x(n)
Ф[x(n)]
y(n)
Дискретная ЛПП
Свойства ЛПП
Линейность
Если
x1(n)
и
x2(n)
Ф
Ф
то
a1x1(n) +a2x2(n)
Ф
Инвариантность задержки
y1(n)
y2(n)
a1y1(n) +a2y2(n)
Если
x(n)
то
x(n-n0)
n0
Ф
Ф
y(n)
y(n-n0)
n0
Свойства ЛПП
Коммутативность (перестановка):
Если
x(n)
Ф1
Ф2
y(n)
то
x(n)
Ф2
Ф1
y(n)
Суперпозиция
x1(n)
+
Синтез
x2(n)
x (n)
Разложение
+
x3(n)
Импульсная характеристика
h(n) – импульсная характеристика – отклик системы
на единичный импульс u0(n)
u0(n)
Дискретная
ЛПП
h(n)
Характеристики ЛПП полностью определяются ее
импульсной характеристикой
Фундаментальная концепция ЦОС
x(n)
y(n)
h(n)
разложение
(декомпозиция)
синтез
y(n)=y1(n)+y2(n)+y3(n
)
x(n)=x1(n)+x2(n)+x3(n)
y1(n)
x1(n)
h(n)
+
+
x2(n)
y2(n)
h(n)
x3(n)
+
y3(n)
h(n)
+
Свертка
m
m
y n x n h n x m h n m x m n h m ,
h() – импульсная характеристика, – оператор свертки.
где
h(n), x(m)
h(n), x(m)
2
1
2
1
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8
h(n-m), x(m)
h(n-m), x(m)
0 0 0 00 1
01 0
20
0 00 00 00 000 000
2 003300404
0 0 0 00 2
02 0
20
2 002200202
0 00 00 00 000 00
nn == -1
7
6
5
4
3
2
1
0
nn == -1
7
6
5
4
3
2
1
0
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8
y(n)
8
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8
y(n) 9
6
3
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8
-4 -3 -2 -1 0 1 2 3 4 5 6 7 8
Физическая реализуемость ЛПП
Если h(n)=0 при n<0
h(n)
h(n)
0
нереализуемая
0
реализуемая
Условие устойчивости ЛПП
h n
n
y1(n),
y2(n),
y3(n) 1
0.25n
y1(n)=0.12
u-1(n) - не устойчивая
n
-2
0
2
4
6
8
10
12
14
n
y2(n)=0.8 u-1(n)
- устойчивая
y3(n)=1/n u-1(n)
-?
Разностные уравнения
Назначение:
• временной анализ дискретных систем;
• способ построения системы;
• порядок, нули, собственные частоты.
Разностное уравнение М-го порядка:
M
M
i 0
i 1
y n bi x n i ai y n i , n 0, aM 0
Пример ЛПП 2-го порядка
y n b0 x(n) b1 x(n 1) b2 x(n 2) a1 y (n 1) a2 y (n 2)
x(n-2)
x(n-1)
b2
b1
x(n)
b0
y(n)
+
-a1
-a2
y(n-1)
y(n-2)
Частотная характеристика ЛПП
Пусть x(n)=ejn – дискретный комплексный гармонический сигнал.
Тогда при прохождении его через ЛПП с ИХ h(n)
y (n) h(m) e j ( n m ) e jn h(m) e jm
m
x(n)
m
H ( e j )
Частотная характеристика ЛПП:
H (e j ) H (e j 2 k ) h(n) e j n , k 0, 1, 2,
n
Преобразование Фурье для дискретных сигналов
Для непрерывных сигналов:
X н ( j ) xн (t ) e
jt
dt
Для дискретных сигналов:
X (e ) x(n) e j n
j
1
1
j
j n
j t
x
(
n
)
X
(
e
)
e
d
xн (t )
X
(
j
)
e
d
н
2
2
т.к. X(ej)=X(ej+2k), k=0,1, 2…
X(ej) непрерывная и
периодичная (период 2)
Свойства ПФ для дискретных сигналов
Последовательность
x(n) y(n)
Преобразование Фурье
X(ej) Y(ej)
1. Линейность
ax(n)+by(n)
a X(e )+ b Y(e )
2. Задержка
x(n-n0)
ejn0 X(ej)
3. Частотный сдвиг
ej0n x(n)
X(ej(-0))
4. Свертка
x(n)y(n)
X(ej)Y(ej)
x(n)y(n)
1
j
j ( )
X
(
e
)
Y
(
e
)d
2
Свойство
5. Произведение
j
j
Соотношение между ПФ дискретных и непрерывных сигналов
|Xн(j)|, |X(ejT)|
/T 2/T-0 2/T 0+2/T 3/T
fд/2
fд
3fд/2
0 0
-/T
-fд/2
Re[xн(t)]=xн(t)
X e
jT
4/T
2fд
1
2
T x’ T m
m
x(n,0) , x(n,0+2/T), x(n, 2/T-0), x(nT,0)
1
0.5
t
0
T
-0.5
-1
2T
3T
4T
Эффект наложения спектров (aliasing)
max= д – без наложения
|Xн(j)|, |X(ejT)|
0
д/2
д
3д/2
2д
5д/2
6д
max > д – наложения
|Xн(j)|, |X(ejT)|
ФНЧ
0
д/2
д
д/2
2д
5д/2
6д
max = д – без наложения
|Xн(j)|, |X(ejT)|
0
3д/2
д
3д/2
2д
5д/2
6д
Z-преобразование
Применяется для описания, синтеза и анализа ЛПП
Преобразование Лапласа
Z-преобразование
X ( , ) x(n) e n e j n
X ( s) x(t ) e dt
st
n
e n r n , ln(r )
s j
X ( , ) x(t ) e
t
e
jt
dt
X (r , ) x(n) r n e j n
n
X ( z ) x(n) z n , z re j
n
Теоретические основы цифровой обработки сигналов. Слайд 27
Z-плоскость
X ( z ) x(n) z n , z re j , r-радиус, -угол, ej - единичная окружность
n
Im(Z)
1
0
1
ЛПП устойчива, если все
полюса находятся внутри
единичной окружности:
rp<1
Re(Z)
Для любой ЛПП X(z) можно представить в виде:
1 z z
M
X z A
i 1
N
i
1
1
p
z
i
i 1
M
1
a z
i
где
i
i 0
N
1 bi z i
,
zi – нули;
pi – полюса.
i 1
Теоретические основы цифровой обработки сигналов. Слайд 28
Примеры Z-преобразования
x(n)
Z[x(n)]
x(n)
Z[x(n)]
u0(n)
1
ejn
1/(1-ejz-1)
u-1(n)
1/(1-z-1)
nan-1
z-1/(1-az-1)2
(-1)n
1/(1+z-1)
n
z-1/(1+z-1)2
ansin(n)
az 1 sin
1 2az 1 cos a 2 z 2
n2
(z-1-z-2)/(1+z-1)3
ancos(n)
1 az 1 cos
1 2az 1 cos a 2 z 2
an
1/(1-az-1)
Связь Z-преобразования и преобразования Фурье
X z z e j X e
j
x n e
j n
n
Теоретические основы цифровой обработки сигналов. Слайд 29
Пример
Z1=e j/4 = 0.707 + j0.707
Z2=e -j/4 = 0.707 - j0.707
p1=0.9e j/4 = 0.636 + j0.636
p2=0.9e -j/4 = 0.636 - j0.636
1
|H(ej)|
0.9
0.8
|H(z)|
|H(ej0.6
)|
1
5
0.4 4.5
0
3
2.5
-0.2
0.8
/4
3.5
z
Im(Z)
4
0.2
0.6
2
0.4
-0.4 1.5
1
-0.6
0.5
-0.8
0.2
0
-2
-1
-1.5
-1.5
0
0
-1
-1
-1
-0.5
-0.5
0
1
-0.5
20.5
3
01
Re(Z)
1.5
4
0.5
2
0
5
1
1
0.5
6
1.5
ImZ
ReZ
Теоретические основы цифровой обработки сигналов. Слайд 30
Основные свойства Z-преобразования
Последовательность
x(n) y(n)
Z-преобразование
X(z) Y(z)
1. Линейность
ax(n)+by(n)
a X(z)+ b Y(z)
2. Задержка
x(n-n0)
z-n0 X(z)
3. Частотный сдвиг
an x(n)
X(z/a)
4. Свертка
x(n)y(n)
X(z)Y(z)
x(n)y(n)
1
1
X
v
Y
z
/
v
v
dv
2 j c
Свойство
5. Произведение
Теоретические основы цифровой обработки сигналов. Слайд 31
Обратное Z-преобразование
x n
1
n 1
X
z
z
dz
2 j c
Способы вычисления:
1. Деление числителя на знаменатель
2. Разложение на простые дроби
3. Использование теоремы о вычетах
4. Таблица Z-преобразований
Теоретические основы цифровой обработки сигналов. Слайд 32
Одностороннее Z-преобразование
Предназначено для анализа физически реализуемых систем
X ( z ) x ( n) z n
n 0
Основное отличие – в свойстве задержки
X z z n0 X 1 z x1 n0 x1 n0 1 z 1
где
x1 n0 , x1 n0 1 ,
x1 1 z n 1 ,
, x1 1 - начальные условия
При нулевых начальных условиях:
X z X 1 z z n0
- аналогично двустороннему Z-преобразованию
Теоретические основы цифровой обработки сигналов. Слайд 33
Решение РУ с помощью Z-преобразования
j n
Пример: решить РУ y n x n ay n 1 , y (1) K , x n e u1 n
1
Решение: Y z X z a Y z z K
Y z
X z aK
1 az 1
,
- Z-преобразование от обеих частей
x n e jn X z
1
1 e j z 1
a a e j
e j a e j
aK
1
aK
Y z
1
1
1
j 1
1
1 az
1 az
1 az
1 e j z 1
1 e z 1 az
j n 1
n 1
a
e
1
n 1
y n
u n
Y ( z ) a K
j
j 1
ae
a e
Общий случай решения РУ порядка L
L
L
i 0
i 1
y n ai x n i bi y n i , x (n) 0 при n 0
L
L
Y z ai z X z bi z 1Y z Y i Y 1 i z 1 ...
i 0
i
i 1
Теоретические основы цифровой обработки сигналов. Слайд 34
Пример вычисления обратного Z-преобразования
2. Разложение на простые дроби:
30 z 2
X z 2
6z z 1
1. Деление числителя на знаменатель:
30 z 2
x n z
n
6z2 z 1
5
35 2
5 z 1
z ...
6
36
n
5
x 0 x 1 z ... 5 ...
6
1
5 35
x n 5, , ,...
6 36
i
Z 1
i pin
1
1 pi z
p1 1/ 2, p2 1/ 3
30 z 2
5
X z
6 z 1 2 z 1 3 1 1 1 1
1 z 1 z
2 3
X z
3
2
1
1
1 z 1 1 z 1
2
3
n
n
3 1 2 2 1 3 , при n 0
x n
при n<0
0,
Теоретические основы цифровой обработки сигналов. Слайд 35
Дискретное преобразование Фурье
Дискретное преобразование Фурье размерностью N:
N 1
X p k xp n e
j
2
kn
N
k 0, 1 ... N 1
,
n 0
Xp(k) – периодическая последовательность с периодом N
Обратное дискретное преобразование Фурье:
N 1
1
xp n X p k e
N k 0
j
2
kn
N
,
n 0, 1 ... N 1
xp(n) – периодическая последовательность с периодом N
Теоретические основы цифровой обработки сигналов. Слайд 36
Связь Z-преобразования и ДПФ
Пусть
x n , при 0 n N 1
x n p
0, при других n
Тогда
X z x n z
n
Полагая
zk e
j
2
k
N
– конечная последовательность
N 1
x n z n
n 0
, k=0,1..N-1
X p (k ) X z
N 1
2
k
z e N
j
x n e
j
2
nk
N
n 0
Im(Z)
N=8
Re(Z)
0
Теоретические основы цифровой обработки сигналов. Слайд 37
Связь ДПФ и ПФ
2
N 1
j
kn
1
n
N
X z x n z X p k e
z n
n 0
n 0 N k 0
N 1
N 1
x(n)
1
X p k e
k 0 N
n 0
N 1
N 1
X e
где:
j
X ( z)
( )
j
2
k
N
N 1 X
1 zN
p k
z
2
j
k
N
k 0
1
N
1 z e
n
1
2 k
X
k
,
p
j
z e
N
k 0
N 1
N
sin
j N 1
2 e 2 ,
N sin
2
Ф(0)=1 :
X(ej2k/N)=X(k)
Теоретические основы цифровой обработки сигналов. Слайд 38
Связь ПФ и ДПФ (пример)
x (n)
xp(n)
0
N
|X (ej)|
0
n
4
2N
(k)
|Xp(k)|
2
N
arg[X (ej)]
0
2N
arg[Xp(k)]
2
N
4
2N
Теоретические основы цифровой обработки сигналов. Слайд 39
(k)
Дополнение нулями
x(n) – конечная последовательность длины N,
X (e j )
X (e j ) x(n) e j n
N 1
l
X e j (2 / L )l x(n) e j (2 / L ) ln , l 2 l / L, l 0,1..L 1
n 0
x(n), 0 n N 1,
ˆx(n)
N n L 1,
0,
L 1
N 1
n 0
n 0
Xˆ k xˆ (n) e j (2 / L ) kn x(n) e j (2 / L ) kn
Xˆ k X e j (2 / L ) k
X(ej), X9(k), X16(k)
-0.5
0
-0.5
Теоретические основы цифровой обработки сигналов. Слайд 40
Основные свойства ДПФ
Свойство
1. Линейность
2. Задержка
Последовательности с
периодом N
xN(n), yN(n)
N-точечное ДПФ
XN(k) YN(k)
axN(n)+byN(n)
a XN(k)+ b YN (k)
xN(n-n0)
3. Частотный сдвиг
4. Свертка
5. Произведение
xN k e
-
2
n0k
N
XN k e
-
2
n0k
N
XN(k-n0)
xN(n)yN(n)
XN(k)YN(k)
xN(n)yN(n)
1 N-1
XN (m)YN (k - m)
N m=0
Теоретические основы цифровой обработки сигналов. Слайд 41
Основные свойства ДПФ
Циклический сдвиг конечной последовательности
x6(n)
x6(n+2)=x6(n-4)
0
5
n
0
n
5
Если xN(n), yN(n) -действительные
Re X N k Re X N N k
Im X N k Im X N N k
6. Симметрия:
X N k X N N k
arg X k arg X N k
N
N
Пусть zN(n)=xN(n)+jyN(n)
Im X k 1 2 Im Z k Im Z N k
Re Y k 1 2 Im Z k Im Z N k
Im Y k 1 2 Re Z N k Re Z k
Re X N k 1 2 Re Z N k Re Z N N k
N
N
N
N
N
N
N
N
N
Теоретические основы цифровой обработки сигналов. Слайд 42
Примеры ДПФ
1
1
x1(n)=u0(n),
x2(n)=u0(n-4),
x3(n)=u0(n-8)
arg[X1(k)], arg[X2(k)], arg[X3(k)]
2
|X1(k)|=|X2(k)|=|X3(k)|
1
0
0
-
0
10
20
30
40
50
60
0
-0.5
0
0.5
-0.5
Re[X1(k)], Re[X2(k)], Re[X3(k)]
1
0
0
-1
-1
0
0.5
0.5
Im[X1(k)], Im[X2(k)], Im[X3(k)]
1
-0.5
0
-0.5
Теоретические основы цифровой обработки сигналов. Слайд 43
0
0.5
Примеры ДПФ
|X(k)|
x(n)=u-1(n),
16
1
10
0
0
100
200
300
400
500
x(n)
0-0.5
0
0.5
0
0.5
|X(k)|
16
1
10
0
100
200
300
400
500
0-0.5
Теоретические основы цифровой обработки сигналов. Слайд 44
Свертка последовательностей
1. Циклическая (периодическая, круговая);
2. Линейная (апериодическая);
3. Секционированная;
4. Быстрая (на основе БПФ, на основе разложения на
короткие, на основе структурных свойств, на основе
ТЧП)
Теоретические основы цифровой обработки сигналов. Слайд 45
Циклическая свертка
N 1
y p n x p l hp n l
l 0
hp(n)
n
0
N=9
2N=18
xp(n)
0
N=9
n
2N=18
N=9
l
2N=18
N=9
2N=18
xp(l),hpp(3-l)
(4-l)
(1-l)
(2-l)
(7-l)
(5-l)
(6-l)
(0-l)
yp(n)
0
n
Теоретические основы цифровой обработки сигналов. Слайд 46
Быстрая свертка на основе БПФ
y n x n h n Y k X k H k
x(n)
Дополнение
нулями
(опционально)
xp(n)
БПФ
Xp(k)
Yp(k)
h(n)
Дополнение
нулями
hp(n)
БПФ
ОБПФ
y(n)
Hp(k)
(опционально)
Для БПФ по основанию 2 выигрыш в кол. операций умножения
N / log 2 N 1
Теоретические основы цифровой обработки сигналов. Слайд 47
Линейная свертка
n
y n x m h n m , n 0,1
m 0
N1 N 2 1
hp(n)
N1=4
0
3
xp(n)
0
n
12
M N1+N2-1
N2=8
7
12
n
12
n
yp(n)
N1+N2-1=11
0
10
Теоретические основы цифровой обработки сигналов. Слайд 48
Секционированные свертки
Для свертки последовательностей значительно различающихся по длине
1. Метод перекрытия с суммированием
N>>L
x(n)
n
M
h(n)
y0(n)
2M
N=3M
n
L
+
y1(n)
n
L+M-1
n
y2(n)
y(n)
M
+
M
M
L+M-1
L+2M-1
2M
n
L+3M-1
2M
n
L+3M-1
L+2M-1
Теоретические основы цифровой обработки сигналов. Слайд 49
Секционированные свертки
2. Метод перекрытия с накоплением
h(n)
x(n)
xy0(n)
xy1(n)
n
L
M
M
2M
n
N=3M
n
M+L-1
n
yx2(n)
M
2M
3M
3M+L-1
n
2M
yx3(n)
3M
n
3M
y(n)
4M
n
M
2M
3M
L+3M-1
Теоретические основы цифровой обработки сигналов. Слайд 50
Раздел 2. Цифровые фильтры
Классификация
По импульсной характеристике:
•С конечной импульсной характеристикой (КИХ,КИО)
•С бесконечной импульсной характеристикой (БИХ, БИО)
По реализации:
•рекурсивные
•нерекурсивные
y(n) F[ y(n 1), y(n 2),...x(n), x(n 1),...]
y(n) F[ x(n), x(n 1), x(n 2)...]
По назначению:
•Фильтрация во временной области (Сглаживание, удаление постоянной
составляющей, изменение формы, …)
•Фильтрация в частотной области (фильтры нижних частот (ФНЧ),
фильтры верхних частот (ФВЧ), полосовые (ПФ), режекторные (РФ),
многочастотные, фазовые (всепропускающие),…)
По свойству адаптации:
•Неадаптивные
•Адаптивные
По скорости дискретизации:
•Неизменяющие частоту дискретизации
•Изменяющие частоту дискретизации (дециматоры, интерполяторы)
Теоретические основы цифровой обработки сигналов. Слайд 51
Структурные схемы цифровых фильтров
Рекурсивные фильтры
N
Прямая форма 1
i
b
z
i
Y ( z)
H ( z)
iN0
X ( z)
i
a
z
i
N
Y ( z ) ai z
i 0
i
N
X ( z ) bi z ;
i
i 0
; a0
i 0
N
1;
N
a y (n i) b x(n i );
i
i 0
N
N
i 0
i 1
i 0
i
y (n) bi x(n i) ai y (n i )
z-1
z-1
b1
x(n)
z-1
b2
bn
b0
y(n)
-aN
z-1
-a2
-a1
z-1
z-1
Теоретические основы цифровой обработки сигналов. Слайд 52
Структурные схемы рекурсивных фильтров
Прямая форма 2 (каноническая)
N
Y ( z)
1
H ( z)
N
bi z i H1 ( z ) H 2 ( z );
X ( z)
ai z i i 0
N
i 0
W ( z)
1
Y ( z)
H1 ( z )
N
;
H 2 ( z)
bi z i ;
X ( z)
W ( z ) i 0
i
a
z
i
i 0
N
w(n) x(n) ai w(n i );
i 1
x(n)
w(n)
a1
a2
N
y (n) bi w(n i )
b0
i 0
y(n)
z-1
b1
z-1
b2
z-1
-aN
bN
Теоретические основы цифровой обработки сигналов. Слайд 53
Структурные схемы рекурсивных фильтров
N
Каскадная форма
H ( z)
i 0
N
i
a
z
i
1 bi z
Hi ( z)
;
1
1 ai z
либо
i 1
1 b1i z 1 b2i z 2
Hi ( z)
;
1
2
1 a1i z a2i z
b0
x(n)
H1(z)
yi(n)
bi
ai
........
H2(z)
xi(n)
z-1
K
b0 H i ( z );
i 0
1
где
i
b
z
i
y(n)
Hk(z)
xi(n)
yi(n)
z-1
z-1
a1i
b1i
z-1
a2i
b2i
Теоретические основы цифровой обработки сигналов. Слайд 54
Структурные схемы рекурсивных фильтров
Параллельная форма
K
H ( z ) c H i ( z );
i 1
b
c N ;
aN
b0i b1i z 1
Hi ( z)
;
1
2
1 a1i z a2i z
b0i
Hi ( z)
;
1
1 a1i z
cN
H1
x(n)
y(n)
Hk
Теоретические основы цифровой обработки сигналов. Слайд 55
Структурные схемы нерекурсивных фильтров
Прямая форма
Y ( z ) N 1
H z
h(i ) z i ;
X ( z ) i 0
N 1
y (n) h(i ) x(n i )
i 0
x(n)
Z-1
h(0)
h(1)
Z-1
Z-1
h(2)
Z-1
h(N-1)
S
y(n)
Фильтр с многоотводной линией задержки
(трансверсальный фильтр)
Теоретические основы цифровой обработки сигналов. Слайд 56
Инверсная форма ЦФ
Прямая
Инверсная
y
y
x
x
+
z
z
x
x
z
+
z
y
y
x(n)
h(n-1)
-1
Z
h(n-3)
h(n-2)
+
-1
Z
+
-1
Z
h(0)
+
Теоретические основы цифровой обработки сигналов. Слайд 57
y(n)
КИХ фильтр на основе интерполяционной формулы Лагранжа
N 1
N 1
Am
H ( z ) (1 z zn )
;
1
m 0 1 z zm
n 0
1
где Am
H zm
N 1
1
(1
z
m zn )
n 0, n m
Для N=3:
(1 z 1 z0 )(1 z 1 z2 )
(1 z 1 z1 )(1 z 1 z2 )
H ( z)
H ( z0 )
H ( z1 )
1
1
1
1
(1 z0 z1 )(1 z0 z2 )
(1 z1 z0 )(1 z1 z2 )
(1 z 1 z0 )(1 z 1 z1 )
H ( z2 )
1
1
(1 z2 z0 )(1 z2 z1 )
1
1-z-1z0
1
1-z-1z1
x(n)
1-z-1z0
1-z-1z1
1-z-1zN-1
y(n)
+
1
1-z-1zN-1
Теоретические основы цифровой обработки сигналов. Слайд 58
Фильтр с частотной выборкой
Получается из ЦФ на основе формулы Лагранжа при: Z
N 1
При этом
[1 z e
1
j
2
n
N
] 1 z
N
e
2
n
N
, n=0,1...N
2
j
m
1
N
Am
H (e
) - отсчет ЧХ
N
;
n 0
1
1 z 1
1
H0/N
H1/N
1
1 z e
x(n)
n
j
j
2
N
y(n)
1-z-N
+
HN-1/N
1
1
1 z e
j
2
N1
N
Теоретические основы цифровой обработки сигналов. Слайд 59
Лестничные (решетчатые) фильтры
Применение:
•анализ и синтез речи;
•компрессия и декомпрессия данных;
•адаптивная фильтрация.
Физическая модель: каскадное соединение цилиндров разного
диаметра. Коэффициенты фильтра представляют часть энергии
волны, отраженной от границ раздела цилиндров разного диаметра.
Преимущества
• нечувствительны к
погрешностям коэффициентов
• при увеличении порядка
фильтра не требуется
перерасчет коэффициентов
имеющихся звеньев
• легко обеспечивается
устойчивость БИХ-структур
Недостатки
больше вычислительные
затраты по сравнению со
структурами прямой формы
Теоретические основы цифровой обработки сигналов. Слайд 60
Нерекурсивный решетчатый фильтр
y1(n)
+
+
x(n)
Z-1
yM(n)
y2(n)
+
K1
K2
KM
K1
K2
KM
Z-1
+
U1(n)
Z-1
+
U2(n)
yi (n) yi 1 n Ki ui n 1 , i 1, 2,..., M 1
ui (n) Ki yi 1 n ui 1 n 1 , i 1, 2,..., M 1
для первого звена:
y0 (n) x(n)
u0 (n) x(n)
Теоретические основы цифровой обработки сигналов. Слайд 61
+
UM(n)
Рекурсивный решетчатый фильтр
x2(n)
xN(n)
+
+
x1(n)
y(n)
+
+
KN
K2
K1
-KN
-K2
-K1
Z-1
UN(n)
+
U2(n)
Z-1
+
U1(n)
x ( n) xN n
xi 1 (n) xi n K i ui 1 n 1 , i N , N 1,...,1
ui (n) Ki xi 1 n ui 1 n 1 , i N , N 1,...,1
y (n) x0 n x1 (n) K1 y n 1
K0 1
Теоретические основы цифровой обработки сигналов. Слайд 62
Z-1
Лестнично-решетчатый фильтр
xN(n)
x2(n)
x1(n)
+
+
+
+
KN
K2
K1
-KN
-K2
-K1
Z-1
+
UN(n)
CN
Z-1
+
U1(n)
C1
U2(n)
CN-1
Z-1
C2
C0
y(n)
+
+
+
Теоретические основы цифровой обработки сигналов. Слайд 63
+
Фильтры скользящего среднего
Преимущества: оптимальный фильтр для подавления
случайного шума, простота реализации
Недостаток: плохие фильтрующие свойства в частотной области
1 M 1
y ( n)
x(n k )
M k 0
Для M=4:
y ( n)
x(n) x(n 1) x(n 2) x(n 3)
4
x(n)
Z-1
1/4
x(n-1)
1/4
x(n-2)
Z-1
1/4
S
Z-1
x(n-3)
1/4
y(n)
Теоретические основы цифровой обработки сигналов. Слайд 64
Фильтры скользящего среднего
Импульсная характеристика:
Переходная характеристика:
n 1
, при n 0..M -1
H ( n) M
0, при других n
1
, при n 0..M -1
h( n) M
0, при других n
Для M=4:
1
0.25
0
исходный сигнал
n
0
после фильтра M=11
M=51
Теоретические основы цифровой обработки сигналов. Слайд 65
n
Фильтры скользящего среднего
Частотная характеристика:
HM ( f )
sin( M f )
M sin( f )
|H5(f)|, |H11(f)|, |H31(f)|, дБ
0
-10
-20
-30
0
0.1
0.2
0.3
0.4
f
Теоретические основы цифровой обработки сигналов. Слайд 66
Фильтры скользящего среднего
Рекурсивная форма реализации фильтра:
y ( n)
1
x(n) x(n 1) ... x(n M 1)
M
1
y (n 1) x(n 1) x(n) x(n 1) ... x(n M 2) x(n M 1) x(n M 1)
M
My(n)
1
y (n) x(n) x(n M ) y (n 1)
M
y(n)
xN(n)
-
+
1/M
Z-M
Z-1
Теоретические основы цифровой обработки сигналов. Слайд 67
Фильтры скользящего среднего
Каскадное соединение фильтров:
x(n)
HM(f)
........
HM(f)
Частотная характеристика:
sin( M f )
H M ,L ( f )
M
sin(
f
)
h7,1, h7,2, h7,4
y(n)
L
H7,1, H7,2, H7,4 , дБ
0
0.2
HM(f)
-20
-40
0.1
-60
0
5
10
15
20
n
0
0.1
0.2
0.3
Теоретические основы цифровой обработки сигналов. Слайд 68
0.4
f
Общая характеристика КИХ-фильтров
Преимущества:
• абсолютно устойчивы;
• физически реализуемы;
• линейные ФЧХ, произвольные АЧХ;
• простой расчет шумов дискретизации;
• возможность использования БПФ.
Недостатки:
• большой порядок при высоких требованиях к скатам АЧХ.
• возможна некратная шагу дискретизации задержка в фильтре
Основные методы расчета:
• взвешивание;
• частотная выборка;
• оптимизация по Чебышеву.
Порядок расчета:
• аппроксимация АЧХ, расчет коэффициентов, выбор порядка;
• выбор схемы построения;
• расчет шумов квантования, выбор разрядности данных и коэф-тов;
• проверка моделированием.
Теоретические основы цифровой обработки сигналов. Слайд 69
КИХ-фильтры с линейной фазой
h(n), 0 n N-1 - отсчеты ИХ фильтра (действительные).
H (e j ) H (e j ) e j ( ) - ЧХ фильтра
() , - ЛФХ фильтра
const - фазовая задержка
N 1
H (e ) h(n)e j n H (e j ) e j
j
n 0
N 1
H (e ) cos h(n) cos n
j
Re :
n 0
Im :
N 1
H (e ) sin h(n) sin n
j
n 0
N 1
Im
:
Re
sin
Nn 01
cos
h(n)sin n
h(n) cos n
n 0
( )
*
Теоретические основы цифровой обработки сигналов. Слайд 70
КИХ-фильтры с линейной фазой
N 1
h(n) sin n
1. =0
0
n 0
N 1
h(0) h(n) cos n
n 1
h(0) - произвольное
h( n)
0, при n 0
2. 0
N 1
N 1
n 0
n 0
h(n) cos n sin h(n) sin n cos
N 1
h(n) sin[( n) ] 0
n 0
Откуда:
N 1
2
h(n) h( N 1 n)
Теоретические основы цифровой обработки сигналов. Слайд 71
КИХ-фильтры с линейной фазой
центр симметрии
h(n)
N=11
=5
5
n
a) Фильтр вида 1: четная симметрия, N-нечетное
центр симметрии
h(n)
5
6
б) Фильтр вида 2: нечетная симметрия, N-четное
Теоретические основы цифровой обработки сигналов. Слайд 72
N=12
=5.5
n
КИХ-фильтры с линейной фазой
h(n), 0 n N-1 - отсчеты ИХ фильтра (действительные).
H (e j ) H (e j ) e j ( ) - ЧХ фильтра
() ,
,
const - фазовая задержка
1. =0
h(0) - произвольное
h( n)
0, при n 0
2. 0
N 1
2
2
h( n) h( N 1 n)
Для нечетных N:
N 1
h
0
2
Теоретические основы цифровой обработки сигналов. Слайд 73
КИХ-фильтры с линейной фазой
центр антисимметрии
h(n)
N=11
=5
n
5
a) Фильтр вида 3: четная антисимметрия, N-нечетное
центр антисимметрии
h(n)
N=10
=4.5
4
5
б) Фильтр вида 4: нечетная антисимметрия, N-четное
Теоретические основы цифровой обработки сигналов. Слайд 74
n
Импульсные и частотные характеристики КИХ-фильтров c ЛФХ
Вид 1. N-нечетное, h(n)-симметричная
N 1
h(n) h( N 1 n) n 0,1,...
2
N 1
2
N 1
H (e j ) exp j
a (n) cos n
2 n 0
N 1
a (0) h
2
h(n)
N 1
a ( n) 2h
n
2
N=9
N-1
N 1
n 1, 2,...
2
N=19
n
a(n)
n
N-1
2
H * (e j )
0
2
n
Теоретические основы цифровой обработки сигналов. Слайд 75
Импульсные и частотные характеристики КИХ-фильтров c ЛФХ
Вид 2. N-четное, h(n)-симметричная
N 1
n 0,1,...
2
N
h(n) h( N 1 n)
N 1 2
1
H (e ) exp j
b
(
n
)
cos
n
2
2 n 1
j
N
b( n) 2h n
2
h(n)
n 1, 2,...
N=9
N-1
N 1
2
N=18
n
a(n)
H * (e j )
n
N-1
2
2
n
0
Теоретические основы цифровой обработки сигналов. Слайд 76
Импульсные и частотные характеристики КИХ-фильтров c ЛФХ
Вид 3. N-нечетное, h(n)-антисимметричная
N 1
h(n) h( N 1 n), 0 n N 1, h
0
2
N 1
N 1 2
H (e ) j exp j
c(n)sin n
2 n 1
N 1
N 1
n 1, 2,...
c ( n) 2h
n
2
2
j
h(n)
N-1
n
c(n)
H * (e j )
0
n
N-1
2
2
Теоретические основы цифровой обработки сигналов. Слайд 77
Импульсные и частотные характеристики КИХ-фильтров c ЛФХ
Вид 4. N-четное, h(n)-антисимметричная
h(n) h( N 1 n), 0 n N 1
N
2
N 1
1
H (e j ) j exp j
d
(
n
)sin
n
2
2 n 1
N
d ( n) 2h n
2
n 1, 2,...
N
2
h(n)
N-1
n
d(n)
H * (e j )
0
n
N
2
2
Теоретические основы цифровой обработки сигналов. Слайд 78
Проектирование КИХ-фильтров методом взвешивания
Задача проектирования
Заданы требования к АЧХ:
1 – неравномерность в полосе пропускания (ПП);
2 – неравномерность в полосе заграждения (ПЗ);
p – граничная частота полосы пропускания;
s – граничная частота полосы заграждения.
H * (e j )
2
p
s
Определить:
N-порядок фильтра,
h(n), n=0, 1 ... N-1 – коэффициенты фильтра
Теоретические основы цифровой обработки сигналов. Слайд 79
Явление Гиббса
Поскольку:
H (e ) h(n)e j n
j
n
то:
1 2
j
j n
h( n)
H
(
e
)
e
d , n 0, 1, 2,...
0
2
Если H(ej) идеальная, то имеются два затруднения:
1. h(n) – бесконечная
усечение до N/2
2. Физически нереализуемая
сдвиг на N/2 вправо
H*(ej) - идеал.
N1>N2
p s
C
2
Теоретические основы цифровой обработки сигналов. Слайд 80
Проектирование КИХ-фильтров методом взвешивания
Операции метода взвешивания
Способ 1
1. выбрать N и w(n)
2. вычислить W (e
j
Способ 2
1. выбрать N и w(n)
)
2.
hˆ(n) h(n) w(n)
) ДПФ hˆ(n)
ˆ (e j ) H (e j ) *W (e j )
3. H
ˆ (e
3. H
4. проверка 1, 2, wp, ws
4. проверка 1, 2, wp, ws
5.
j
hˆ(n) ОДПФ Hˆ (e j )
Теоретические основы цифровой обработки сигналов. Слайд 81
Проектирование КИХ-фильтров методом взвешивания
в частотной области
H * (e j )
0
*
во временной области
h(n)
идеальный
ФНЧ
бесконечная
нереализуемая
j
W (e )
0
w(n)
Hˆ (e ) H (e ) * W (e )
j
n
0
j
j
N-1
2
0
N-1
2
0
N-1
2
ˆ
h(n) h(n) w(n)
N-1
2
N 1
g (n) hˆ n
2
Теоретические основы цифровой обработки сигналов. Слайд 82
n
n
Основные виды оконных функций
Требования к окнам:
- минимальный уровень боковых лепестков (min пульсаций АЧХ фильтра);
- минимальная ширина главного лепестка АЧХ окна (min ширина
переходной полосы фильтра).
1. Прямоугольное окно
N 1
N 1
n
1,
wR (n)
2
2
0, остальные N
WR (e j )
sin(
sin
N
)
2
2
Теоретические основы цифровой обработки сигналов. Слайд 83
Основные виды оконных функций
2. Обобщенное окно Хемминга
2 n
wн (n) wR (n) (1 ) cos
N
2
2
j
j
1
1
j
j
N
N
Wн (e ) WR (e )
WR e
WR e
2
2
2
N
N
N
2
2
N
0
2
N
N
N
N
Теоретические основы цифровой обработки сигналов. Слайд 84
Основные виды оконных функция
3. Окно Кайзера
2
2n
I0 1
N 1
wK (n)
I0 ( )
sin
W (e j )
/
1
2
/ 1
K
2
4. Окно Ланцоша
2 n
sin N 1
wL (n)
2
n
N 1
L
Теоретические основы цифровой обработки сигналов. Слайд 85
Весовые функции окон и их ЧХ
Весовые функции
1
Весовые функции
Модуль ЧХ
0
1
0
-20
-20
0.5
0.5
-40
0
20
40
n -60
-40
-0.5
прямоугольное
1
0
0.5
0
0
20
40
n -60
-0.5
0
0.5
-0.5
0
0.5
Блекмана-Хэрриса
1
0
-20
-20
0.5
0.5
-40
0
Модуль ЧХ
20
40
n -60
-40
-0.5
Фейера
0
0.5
0
20
40
n -60
Чебышёва
Теоретические основы цифровой обработки сигналов. Слайд 86
Основные характеристики некоторых окон
Вид окна
Максимальный
уровень
бокового
лепестка, дБ
Асимтотическая
скорость спадания
бокового лепестка,
дБ/октава
Эквивалент
ширины
полосы
1. Прямоугольное
-13.3
-6
1.00
2. Треугольное
-26.5
-12
1.33
3. Ханна
-31.5
-18
1.50
4. Хемминга
-43
-6
1.36
5. Наттола
-98
-6
1.80
6. Гауссовское
-42
-6
1.39
7. Чебышёва
-50
0
1.39
Теоретические основы цифровой обработки сигналов. Слайд 87
Проектирование методом частотной выборки
N 1
X p k xp n e
n0
j
2
kn
N
2
j
kn
1 N 1
N
xp n X p k e
N k 0
ДПФ
1 z N N 1
X z
N k 0
ОДПФ
X p k
1 z 1e
j
2
k
N
1. Произвести дискретизацию в N равноотстоящих точках на единичной
окружности
2. По этим точкам интерполировать непрерывную ЧХ
Теоретические основы цифровой обработки сигналов. Слайд 88
Проектирование методом частотной выборки
1+1 Ĥ(ej), H(ej)
1-1
1+2
1- 0
2
s
2
p
Ĥ(ej)
T1
T2
T3
0
ПП
переходная
полоса
ПЗ
Теоретические основы цифровой обработки сигналов. Слайд 89
Проектирование оптимальных КИХ-фильтров
Критерий оптимальности:
Вид аппроксимации ЧХ:
Процедура оптимизации:
Min. max. ошибки аппроксимации
a(n) cos n
Чебышевская
Итерационный алгоритм замены
Аппроксимация ЧХ фильтра
H * (e j ) Q(e j ) P(e j )
Вид фильтра
Вид 1
Q(ejw)
1
P(ejw)
N 1
2
a(n) cos n
n 0
Вид 2
cos (/2)
N
1
2
b (n) cos n
n 0
Вид 3
sin
N 3
2
c (n) cos n
n 0
Вид 4
sin (/2)
N
1
2
d (n) cos n
n 0
Теоретические основы цифровой обработки сигналов. Слайд 90
Постановка задачи проектирования
D(e j ) - заданная ЧХ фильтра (идеальная);
W (e j ) - весовая функция ошибки аппроксимации.
Взвешенная функция ошибки аппроксимации
E (e j ) W (e j ) D(e j ) H * (e j )
т.к.
j
j
D(e j )
j
P
(
e
)
то: E (e ) W (e )Q(e )
j
Q (e )
j
H (e ) Q(e ) P(e )
*
j
Обозначая:
Wˆ (e ) W (e )Q(e )
Получим:
E (e j ) Wˆ (e j ) Dˆ (e j ) P(e j )
j
j
j
j
j
j
D
(
e
)
и Dˆ (e )
Q(e j )
max E (e j ) min
a ( n ), b ( n )
A
j
- критерий оптимальности
c ( n ), d ( n )
Теоретические основы цифровой обработки сигналов. Слайд 91
Графическая интерпретация задачи проектирования
Dˆ (e j )
P (e j )
Wˆ (e j )
5
2
0
D (e j ) P (e j )
E (e j )
max E (e j )
0
A
Теоретические основы цифровой обработки сигналов. Слайд 92
Теорема Чебышева
r 1
j
Если P (e ) a (n)cos n , то необходимое и достаточное условие,
n0
что P(ej) наилучшая аппроксимация по минимальному критерию функции
Dˆ (e j )
, состоит в наличии не менее r+1 экстремума функции E(ej)
в области А т.е. для
1<2<3 ... <r+1
E (e ji ) E (e ji 1 ), i 1, 2,..., r
E (e j ) max E (e j )
A
j
P (e )
1
2
0
2
ˆ (e j )
D
i
Теоретические основы цифровой обработки сигналов. Слайд 93
Решение задачи оптимизации
K
* ji
j
H
(
e
)
D
(
e
)
j
W (e )
* j
dH (e )
0; i 1, 2... r
i
d
Сущность итерационного алгоритма :
Избежать решения системы нелинейных уравнений относительно
экстремальных частот путем итерационной процедуры их уточнения и
решения системы из r+1 линейных уравнений относительно r
коэффициентов и погрешности .
Теоретические основы цифровой обработки сигналов. Слайд 94
Процедура проектирования оптимальных фильтров
1. Задание D(ej), W(ej) и N
Задать r+1 экстремумов
2. Пересчет Dˆ (e j ), Wˆ (e j ) и P(e j )
3. Решение задачи аппроксимации
4. Расчет ИХ фильтра h(n)
Рассчитать 1, 2
Интерполировать P(ej)
P(ej)
1+1
1+
1
1
1-1
1-
1
Рассчитать E(ej), найти
экстремумы |E(ej)|>
Да
Экстремумы
изменились?
Нет
2
-2
Наилучшая
аппроксимация
Теоретические основы цифровой обработки сигналов. Слайд 95
Свойства оптимальных ФНЧ
Ширина переходной полосы:
Параметры оптимального ФНЧ:
N, Fp, Fs, K
дБ
0
-20
-40
-60
-80
100
1
F=Fs-Fp
Оценка качества фильтра нормированная ширина переходной
полосы
K 1
2
D=(N-1)F
2
При N (>50) D не зависит от N
0 0.1 0.2 0.3 0.4 0.5
Fp Fs
f
4
D
1=0.01
3
1=0.05
2
1=0.5
1
0
-100
1=0.1
-75
-50
-25
Теоретические основы цифровой обработки сигналов. Слайд 96
0
lg2
Сравнение КИХ ФНЧ, спроектированных разными методами
6
5
D=D(d1,d2)
Метод взвешивания (окно Кайзера)
d1=d2
Фильтры с частотной выборкой
d1=1.4*10-2...5.6*10-2
4
3
Оптимальные ФНЧ
2
1
0
10-5 10-4 10-3 10-2
1=10-2
1=2*10-2
1=5*10-2
1=10-1
2
-1
10
Теоретические основы цифровой обработки сигналов. Слайд 97
БИХ-фильтры с линейной ФЧХ
Метод 1
x(n)
Инверсия a(n)
X(z) времени A(z)
a(n)=x(-n)
f(n)
H(z)
F(z)
Инверсия b(n)
времени B(z)
b(n)=f(-n)
H(z)
A( z ) X ( z 1 )
F ( z ) H ( z ) A( z ) H ( z ) X ( z 1 )
B( z ) F ( z 1 ) H ( z _1 ) X ( z )
Y ( z ) H ( z ) B( z ) X ( z ) H ( z ) H ( z 1 )
H ЭКВ ( z ) Y ( z ) / X ( z ) H ( z ) H ( z 1 )
j
j
H ЭКВ (e ) H (e )
2
(e j ) 0
Теоретические основы цифровой обработки сигналов. Слайд 98
y(n)
Y(z)
БИХ-фильтры с линейной ФЧХ
Метод 2
x(n)
g(n)
H(z)
Инверсия a(n)
времени
A( z ) X ( z 1 )
H(z)
f(n)
Инверсия
времени
F ( z ) H ( z ) X ( z 1 )
B( z ) F ( z 1 ) H ( z 1 ) X ( z )
G( z ) H ( z ) X ( z )
Y ( z ) B( z ) G ( z ) X ( z ) H ( z ) H ( z 1 )
H ЭКВ ( z ) H ( z ) H ( z 1 )
H ЭКВ (e j ) 2 H (e j ) cos ( )
Теоретические основы цифровой обработки сигналов. Слайд 99
+
y(n)
b(n)
Всепропускающие фильтры
Назначение: линеаризация ФЧХ.
Необходимое условие:
должен существовать нуль
для каждого полюса
p re j
1
z e j
r
(1/r;
(1/r;-
arg( H (e j ))
(r;
(r;-
1 j 1 j
2
1
2
z
e
z
e
z
z
cos
r
r
2
r
r
H ( z)
2
2
j
j
z
2
rz
cos
r
z re z re
0.25
0.5
r 2 z 2 2rz cos 1
2 2
r ( z 2rz cos r 2 )
H (e j ) const
Теоретические основы цифровой обработки сигналов. Слайд 100
Классификация методов расчета БИХ-фильтров
Задача аппроксимации АЧХ, ФЧХ, ГЗ или ИХ за счет выбора
коэффициентов фильтра.
N
H ( z)
b z
Y ( z)
iN0
X ( z)
i
i
i
a
z
i
; a0
1;
i 0
3 группы методов расчета:
•расчет ЦФ по фильтрам непрерывного времени;
•прямые методы расчета разложения и количества нулей и полюсов в
Z-плоскости;
•оптимизация при наличии ограничений.
Теоретические основы цифровой обработки сигналов. Слайд 101
Расчет ЦФ по фильтрам непрерывного времени
Аналоговые фильтры-прототипы: Баттерворта, Чебышева I и II
рода, Кауэра-Золотарева (эллиптические).
M
M
Системная функция:
b S
i
a S
i
H ( S ) iN0
i 1
i
i
(S c )
iN0
i
(S d )
i 1
i
d i y (t ) M d i x( )
ai
bi
i
dt
dt i
i 0
i 0
N
дифференциальное уравнение:
Методы дискретизации аналоговых фильтров:
1. Отображение дифференциалов;
2. Инвариантного преобразования ИХ;
3. Билинейного преобразования;
4. Согласованного Z-преобразования.
Теоретические основы цифровой обработки сигналов. Слайд 102
Метод билинейного преобразования
Условия однозначного преобразования аналоговых
фильтров в цифровые
1.
2.
Ось j должна отображаться в единичную окружность в Z-плоскости
(сохранение частотно-избирательных свойств).
Левая полуплоскость S-плоскости должна отображаться внутрь
единичной окружности (сохранение устойчивости)
Im Z
j
j
0
-1
1
0
Re Z
-j
S-плоскость
Z-плоскость
Условия 1 и 2 удовлетворяются отображением:
2 (1 z 1 )
2/T S
S
z
T (1 z 1 )
2/T S
- билинейное преобразование
Теоретические основы цифровой обработки сигналов. Слайд 103
Метод билинейного преобразования
При S=j - частотная ось S-плоскости:
2
j
zT
z 1
2
0, z 1
j
, z 1
T
Полагая S=+j :
2
j
zT
при 0, z 1
2
j
T
- 1ое условие выполняется
- 2ое условие выполняется
Аналоговый фильтр с H(S) преобразуется в цифровой с H(z):
H ( z) H (S )
2 1 z 1
S
T 1 z 1
Порядок знаменателя сохраняется, а порядок числителя может возрастать
1
H (S )
S a
1
1 z 1
H ( z)
2
2
2 1 z 1
1
a
z
a
a
T
T
T 1 z 1
Нуль H(S) при S
отображается в z=-1
Теоретические основы цифровой обработки сигналов. Слайд 104
H(j)
2
Метод билинейного преобразования
АЧХ аналогового
фильтра
0
T
H(ej)
Нелинейное соотношение частот:
z e jT
j
S j
j
jT
T
2
j
T
2
2 (1 e
) 2 e e
T
jT
j
T (1 e
) T j 2T
e e 2
2
T
T
tg
2
2
АЧХ цифрового фильтра
T
- для фильтров с почти ступенчатой ЧХ нелинейная связь частотных шкал
может быть скомпенсирована;
- ни ФЧХ, ни импульсная характеристики аналогового и цифрового фильтра
не совпадают
Теоретические основы цифровой обработки сигналов. Слайд 105
Частотные преобразования
Метод 1
Расчет аналогового ФНЧ с=1
Преобразование
полосы частот
Аналог-аналог
Дискретизация
фильтра
ЦФ с заданными
хар-ками
Преобразование частот аналоговых фильтров
Метод 2
Расчет аналогового ФНЧ с=1
Дискретизация
фильтра
Преобразование
полосы частот
ЦФ с заданными
хар-ками
Преобразование частот цифровых фильтров
Теоретические основы цифровой обработки сигналов. Слайд 106
Частотные преобразования
Преобразование полосы частот по методу 1
L - нижняя частота среза;
U - верхняя частота среза.
Вид преобразования
Замена переменной
1. ФНЧ ФНЧ
S S U
2. ФНЧ ФВЧ
S U S
3. ФНЧ ПФ
S 2 U L
S
S (U L )
4. ФНЧ РФ
S
S (U L )
S 2 U L
Уровень пульсаций в полосе пропускания и полосе задержки не изменяется;
С теоретической и расчетной точки зрения оба метода равноценны.
Теоретические основы цифровой обработки сигналов. Слайд 107
Сравнение КИХ и БИХ-фильтров
Оптимальные КИХ-фильтры - эллиптические БИХ.
На обработку 1 отсчета требуется MAC операций (мин.):
N 1
2 - операций MAC для КИХ-фильтра N-го порядка
3n 3
2 - операций MAC для БИХ-фильтра n-го порядка
Для фильтров одинаковой вычислительной сложности:
3n 3 N 1
2
2
N
1
3
n
n
Теоретические основы цифровой обработки сигналов. Слайд 108
Сравнение КИХ и БИХ-фильтров
N/n Fp=0.15, 1=0.1
0.001
30
20
2=0.1
30
0.01
0.0001
10
2
4
6
Fp=0.35, 1=0.00001
N/n
8
0.00001
N/n=3
n
2=0.1
20
10
2
4
6
8
0.01
0.001
0.0001
0.00001
N/n=3
n
1. При Fp>0.3 БИХ-фильтр лучше при любых 1, 2, n.
2. При n 7 БИХ-фильтр лучше при любых 1, 2, Fp.
3. КИХ-фильтр лучше при большой 1 и малой 2.
4. КИХ-фильтр лучше при линейной ФЧХ.
Теоретические основы цифровой обработки сигналов. Слайд 109
Фильтры изменяющие частоту дискретизации
Характерная особенность: различная скорость потока данных на входе и
выходе.
Применения:
• преобразование частоты дискретизации между цифровыми
аудиосистемами;
• узкополосные ФНЧ и полосовые фильтры;
• сжатие полосы частот при цифровой обработке речевых сигналов;
• трансмультиплексоры (преобразование ВРК-ЧРК);
• квадратурная модуляция;
• восстанавливающие и ограничивающие фильтры в цифровых
аудиосистемах;
• узкополосный анализ спектра в сонарных системах и вибрационном
анализе.
Основные операции: прореживание (децимация) и интерполяция.
Теоретические основы цифровой обработки сигналов. Слайд 110
Фильтры изменяющие частоту дискретизации
|X(f)|
x(nT)
t
T
yy(nT/2)
1(nT/2)
0
Интерполяция 2 x(nT)
fs/2
fs 2fs/2 2fs
f
|Y
|Y(f)|
1
0(f)|
t
T/2
fs/4
fs/2
fs
f
Децимация 3 y(nT/2)
y(nT/2)
z0(3nT/2)
3T/2
|Z
|Y(f)|
0(f)|
t
fs/3fs/22fs/3
Теоретические основы цифровой обработки сигналов. Слайд 111
fsfs
f
Фильтры изменяющие частоту дискретизации
Для устранения наложения при прореживании и для снижения искаженией в
спектре при интерполяции необходимо выполнять низкочастотную
фильтрацию, согласованную с коэффициентом изменения частоты
дискретизации.
|X(f)|
АЧХ ФНЧ дециматора
f
fs
fs/2
Прореживание сигнала в 2 раза
|Y1(f)| |Y2(f)|
f
fs1/2
fs1=fs/2
3fs1/2
2fs1
Теоретические основы цифровой обработки сигналов. Слайд 112
Фильтры изменяющие частоту дискретизации
L
H(z)
H(z)
Интерполятор
M
Дециматор
h(0)
x(n)
L
Z-1
h(1)
Z-1
h(2)
Z-1
S
y(m)
Z-1
h(N-1)
Интерполирующий фильтр
Теоретические основы цифровой обработки сигналов. Слайд 113
Фильтры изменяющие частоту дискретизации
h(0)
x(n)
h(0)
x(n)
M
Z-1
Z-1
h(1)
h(1)
M
Z-1
h(2)
-1
Z
S
Z-1
M
h(2)
y(m)
M
-1
Z
Z-1
S
Z-1
h(N-1)
h(N-1)
M
Прореживающий фильтр
В отличие от рекурсивных, нерекурсивные структуры дециматоров
обеспечивают возможность работы умножителей на частоте выходного
сигнала. При больших частотах дискретизации, в дециматорах часто
используют гребенчатые фильтры.
Теоретические основы цифровой обработки сигналов. Слайд 114
y(m)
Спектральный анализ
Методы цифрового спектрального анализа
Основные приложения:
•
•
•
•
•
радиолокация, радионавигация, радиоастрономия;
гидроакустика, гидролокация;
системы распознавания речи;
сжатие полосы речевых сигналов;
вибрационный анализ.
Спектральный анализ – это измерение, которое дает точные или
приближенные значения Z - преобразования дискретного сигнала в
заданном множестве точек
Z - плоскости.
Различают “мгновенный” спектр и оценку спектральной плотности мощности.
Разновидности спектрального анализа:
•
вычисление “мгновенного” спектра с использованием окон;
•
оценивание СПМ классическими методами;
•
оценивание СПМ параметрическими методами:
•
оценивание блочных данных;
•
рекурсивное оценивание;
•
многомерный спектральный анализ.
Теоретические основы цифровой обработки сигналов. Слайд 115
Алгоритмы БПФ
Быстрое преобразование Фурье (БПФ) – метод вычисления ДПФ
{x(n)}, 0 n N-1 – комплексный сигнал.
N 1
ДПФ:
X ( k ) x ( n) e
N 1
j
2
nk
N
, где k 0,1,2...N-1
n 0
X ( k ) x ( n) W
nk
где
W e
j
2
N
- множитель вращения
n 0
{Wnk} периодична по n и k с периодом N:
W(n+mN)(k+lN) = (WN)nk , где m, l = 0, 1, 2…, WN – множитель вращ-я с периодом N.
Количество операций для ДПФ размерности N:
(N-1)2 – комплексных умножений, N(N-1) – комплексных сложений.
Основная идея БПФ – разбиение длинной последовательности на короткие.
N/2
N
Кол ~
N2
ДПФ
Кол=N2/4
ДПФ
Кол=N2/2
N/2
ДПФ
Кол=N2/4
Теоретические основы цифровой обработки сигналов. Слайд 116
Алгоритм БПФ с прореживанием по времени
Пусть N – степень 2.
Разобьем {x(n)} на {x1(n)} – четные отсчеты, {x2(n)} – нечетные отсчеты.
N
x1(n) = x(2n), x2(n) = x(2n+1), для n 0,1... 1
2
N 1
N
1
2
N
1
2
n 0
n 0
n 0
X (k ) x(n) WNnk x(2n) WN2 nk x(2n 1) WN(2 n 1) k
Поскольку WN2 [e
j
2
N 2
] e
2
j
N
2
N
1
2
WN
N
1
2
то X (k ) x1 (n) WNnk WNk x2 (n) WNnk
2
2
n 0
X1 ( k )
2
n0
X 2 (k )
Тогда X (k ) X 1 (k ) WNk X 2 (k )
Вычисление X1(k) и X2(k) – 2N 2/4 MAC + объединение X1(k) и X2(k) – N MAC
Всего N 2/2+N N 2/2 при больших N
Теоретические основы цифровой обработки сигналов. Слайд 117
Алгоритм БПФ с прореживанием по времени
Доопределение X(k) для kN/2 на основании периодичности N/2 точечных ДПФ:
N
k
X
(
k
)
W
X
(
k
),
0
k
1
N
2
1
2
X (k )
X (k N ) W k X (k N ), N k N 1
N
2
1
2
2
2
Из-за WNk - период X(k) не равен периоду X1(k).
k
Т.к. W WN
k
N
N
2
N
k
X
(
k
)
W
X
(
k
),
0
k
1
N
2
1
2
то X (k )
N
k
N
X (k ) W 2 X (k N ), N k N 1
N
2
1
2
2
2
Теоретические основы цифровой обработки сигналов. Слайд 118
Пример алгоритма БПФ размерности 8 по основанию 2 с
прореживанием по времени
Разложение ДПФ размерности 8 на два ДПФ размерности 4.
Этап 3
x1(1)=x(2)
x1(2)=x(4)
x1(3)=x(6)
x2(0)=x(1)
x2(1)=x(3)
x2(2)=x(5)
x2(3)=x(7)
4-х
точечн.
ДПФ
4-х
точечн.
ДПФ
X1(1)
"бабочка"
a
a+b
X(1)
X1(2)
X(2)
X1(3)
X(3)
X1(0)
X2(0)
X2(1)
X2(2)
X2(3)
X(0)
w 3 w 2 w 1 w 0
x1(0)=x(0)
X(4)
X(5)
b
a-b
a wk awk
X(6)
X(7)
Теоретические основы цифровой обработки сигналов. Слайд 119
Пример алгоритма БПФ размерности 8 по основанию 2 с
прореживанием по времени
N
Этап 2
X 1 (k ) A(k ) WNk B(k ) A(k ) WN2 k B(k ), 0 k 1
2
2
N
k
2k
X 2 (k ) C (k ) WN D(k ) C (k ) WN D(k ), 0 k 1
2
2
Этап 2
c(0)=x2(0)=x(1)
c(1)=x2(2)=x(5)
d(0)=x2(1)=x(3)
d(1)=x2(3)=x(7)
2-х
точечн.
ДПФ
2-х
точечн.
ДПФ
X (0)
A(1)
X1(1)
X (1)
X1(2)
X (2)
X1(3)
X (3)
B(0)
B(1)
C(0)
X2(0)
C(1)
X2(1)
D(0)
D(1)
X2(2)
X2(3)
w1 w0
b(1)=x1(3)=x(6)
2-х
точечн.
ДПФ
X1(0)
w3 w2
b(0)=x1(1)=x(2)
A(0)
w 2w 0
a(1)=x1(2)=x(4)
Этап 3
w 2w 0
a(0)=x1(0)=x(0)
2-х
точечн.
ДПФ
X (4)
X (5)
X (6)
X (7)
Теоретические основы цифровой обработки сигналов. Слайд 120
Направленный граф алгоритма БПФ размерности N = 8 по основанию 2
с прореживанием по времени и с замещением (алгоритм Кули-Тьюки).
F (0) f (0) f1 WN0 f (0) f (1);
Этап 1
N
F (1) f (0) f1 WN 2 f (0) f (1);
Этап 1
x(0)
x(4)
w
Этап 2
Этап 3
X(0)
0
X(1)
0
x(2)
X(2)
w
2
w
X(3)
w0
w
0
0
x(3)
w
X(5)
w3
x(5)
X(4)
w1
x(1)
w2
x(6)
w
0
X(6)
2
x(7)
w
0
w
Теоретические основы цифровой обработки сигналов. Слайд 121
X(7)
Свойства алгоритма БПФ по основанию 2
1. Алгоритм состоит из этапов. На каждом этапе происходит изменение
размерности БПФ вдвое по сравнению с предыдущим.
Kэт = log2 N
2. На каждом этапе необходимо выполнить N/2 операций “бабочка”.
A
B
K
X = A + B WN
2 операции комплексного сложения и
1 операция комплексного умножения
Y = A - B WNK
3. Общее число базовых операций "бабочка":
N
K оп log 2 N
2
4. Для вычисления базовой операции достаточно иметь одну
дополнительную ячейку для хранения произведения. Остальные результаты
размещаются в освободившиеся ячейки. Это алгоритм с замещением.
Теоретические основы цифровой обработки сигналов. Слайд 122
Сравнение вычислительных затрат
KДПФ/БПФ2
N2
K ДПФ / БПФ 2
N log 2 N
2500
КДПФ/БПФ2
2000
70
1500
50
30
10
0 5 10 15 20 25 30 N
1000
500
0
2
16
64
256
1024
4096
16384
N
Выигрыш в количестве операций алгоритма БПФ2 по сравнению с ДПФ в
зависимости от размерности N
Теоретические основы цифровой обработки сигналов. Слайд 123
Перестановка данных и двоичная инверсия
Для алгоритма по основанию 2 и прореживанием по времени закон
чередования входных отсчетов описывается двоично-инверсным порядком.
Пример: N = 8 L = log2 8 = 3
№ п/п
0
1
2
3
4
5
6
7
Двоичное
представление
000
001
010
011
100
101
110
111
Двоичная
инверсия
000
100
010
110
001
101
011
111
Двоич.-инверс.
номер
0
4
2
6
1
5
3
7
Способы получения поворачивающих множителей
1. Табличный – требует много памяти, но имеет наибольшее быстродействие
2. Последовательный – не требует много памяти, но имеет низкое быстродейст.
3. Рекуррентный WNK WNK L WNL с изменением шага от этапа к этапу и
0
с начальным условием WN 1 на каждом этапе
Теоретические основы цифровой обработки сигналов. Слайд 124
Алгоритм БПФ с прореживанием по частоте
Входная последовательность разбивается на 2 половины:
N
x1 (n) x(n), при n 0, 1, 2 ... 1
2
N
N
x2 (n) x(n ), при n 0, 1, 2 ... 1
2
2
Тогда N-точечное ДПФ последовательности {x(n)}:
N
1
2
X ( k ) x ( n) W
nk
N
n 0
Т.к.
N
k
2
N
W
N 1
x ( n) W
nk
N
n
e j k
то
N
2
N
1
2
x1 (n) W
n 0
nk
N
N
1
2
( n
x2 (n) WN
n 0
N
1
2
X (k ) [ x1 (n) e j k x2 (n)] WNnk
n 0
Теоретические основы цифровой обработки сигналов. Слайд 125
N
)k
2
Алгоритм БПФ с прореживанием по частоте
N
k
2
N
Поскольку W
e j k 1 то X(k) для четных и нечетных k:
N
1
2
N
1
2
n 0
n 0
X (2k ) [ x1 (n) x2 (n)] WN2 nk [ x1 (n) x2 (n)] WNnk
2
f(n)
N
1
2
N
1
2
n 0
n 0
X (2k 1) [ x1 (n) x2 (n)] WNn (2 k 1) {[ x1 (n) x2 (n)] WNn } WNnk
2
g ( n)
X(2k) получаются из N/2-точечных ДПФ последовательности:
f(n) = x1(n) + x2(n) ; n = 0, 1, 2…N/2 – 1
X(2k+1) получаются из N/2-точечных ДПФ последовательности:
g(n) = [x1(n) - x2(n)]WNn n = 0, 1, 2…N/2 – 1
Теоретические основы цифровой обработки сигналов. Слайд 126
Пример построения алгоритма БПФ размерности 8 с
прореживанием по частоте
Этап 1
X1 (u)
X(0)
- f(0) -
X(1)
- f(1) -
X(2)
- f(2) -
X(3)
- f(3) -
X(6)
X(7)
0
X2 (u)
X(5)
w 1 2
w
3
ww
X(4)
- g(0) - g(1) - g(2) - g(3) -
4-х
точечн.
ДПФ
4-х
точечн.
ДПФ
Теоретические основы цифровой обработки сигналов. Слайд 127
X(0)
X(4)
X(2)
X(6)
X(1)
X(5)
X(3)
X(7)
Алгоритмы БПФ по основанию 2
Направленный граф алгоритма БПФ по основанию 2 с прореживанием по частоте.
x(0)
X(0)
x(1)
X(4)
x(2)
X(2)
x(3)
X(6)
x(4)
X(1)
x(5)
X(5)
x(6)
X(3)
x(7)
X(7)
Теоретические основы цифровой обработки сигналов. Слайд 128
Различия алгоритмов БПФ с прореживанием
по времени и по частоте
по времени
по частоте
1. Порядок следования входных отсчетов:
прямой
двоично-инверсный
2. Порядок следования выходных отсчетов:
прямой
двоично-инверсный
3. Базовая операция “бабочка”
A
B
K
X = A + B WN
Y = A - B WNK
A
B
X=A+B
Y = (A – B) W KN
Теоретические основы цифровой обработки сигналов. Слайд 129
Вычисление обратного ДПФ по алгоритму прямого
Обратное ДПФ {x(n)} для последовательности {X(k)}, k=0,1,…,N-1
1 N 1
x(n) X (k ) W nk
N k 0
N x ( n)
*
- обратное ДПФ
N 1
X (k ) W
*
nk
k 0
* - знак комплексного сопряжения
ДПФ послед-ти X * (k )
Тогда:
1 N 1 *
x(n) [ X (k ) W nk ]*
N k 0
Т.о. можно использовать алгоритмы БПФ для вычисления ДПФ и ОДПФ
Теоретические основы цифровой обработки сигналов. Слайд 130
Алгоритмы БПФ по основанию 4
По аналогии с основанием 2 можно построить алгоритмы БПФ по основанию 4.
ДПФ размерности 4 не требует операций комплексного умножения, так
2
как умножение на W exp j
выполняется перестановкой реальной и
4
мнимой компонент
3 комплексных
умножения
12 комплексных
сложений
Операция «бабочка» по основанию 4 с прореживанием по
времени
Выигрыш по количеству операций комплексного умножения по сравнению с
алгоритмом БПФ по основанию 2 около 25%.
Теоретические основы цифровой обработки сигналов. Слайд 131
Алгоритм БПФ по основанию 4 размерности 16
0
0
4
0
1
8
0
0
2
3
12
1
5
9
0
4
1
5
2
6
3
7
0
0
0
13
0
2
6
10
0
0
0
14
11
0
0
0
8
4
9
6
10
11
0
3
7
2
3
12
6
13
9
14
15
15
Теоретические основы цифровой обработки сигналов. Слайд 132
Принцип построения алгоритма БПФ с
произвольным основанием
Если N – составное число, то одномерный массив отсчетов можно
записать в виде матрицы размерности N=MxL.
Алгоритм вычисления ДПФ размерности N:
Преобразовать одномерный массив в матрицу (заполнение по
строкам!) n m L l , n 0..N 1, m 0..M 1( №столбца), l 0..L 1( №строки).
M 1
Вычислить ДПФ каждого столбца X c k , l x m, l WMmk , k 0..M 1, l 0..L 1
m0
Умножить элементы матрицы
Вычислить ДПФ каждой строки
X c k , l X c k , l WNkl , k 0..M 1, l 0..L 1
L 1
X r k , i X c k , l WLli , k 0..M 1, i 0..L 1
l 0
Преобразовать матрицу в одномерный массив (считывание по
строкам!).
Если размерность строки или столбца - составное число, разбиение
можно повторить.
Для произвольных составных N наиболее быстрый алгоритм со смешанным
основанием – АВПФ (алгоритм Винограда преобразования Фурье).
Теоретические основы цифровой обработки сигналов. Слайд 133
Сравнение БПФ и гребенки фильтров.
X 0 i
+
Z-1
W0
X1 i
+
x i
W1
Z-N
X k i
+
Z-1
Wk
X N 1 i
+
выдает N спектральных отсчетов
в каждый момент времени;
Требует N операций умножениянакопления на 1 отсчет сигнала.
БПФ без перекрытия:
Z-1
-
Гребенка фильтров:
Z-1
WN-1
Анализатор спектра в виде гребенки
фильтров
Выдает N спектральных отсчетов
через N отсчетов сигнала;
1 log N
Требует
2
2
операций умножения-накопления
на 1 отсчет сигнала.
БПФ с перекрытием:
Выдает N отсчетов через N
K
отсчетов сигнала;
Требует в K раз больше
операций
Теоретические основы цифровой обработки сигналов. Слайд 134
Использование «окон» при спектральном анализе
Импульсная характеристика
2π k
exp
n, 0 n N -1
j
h
n
=
N
одного из гребенки фильтров:
Частотная характеристика
(без фазового множителя):
H e j
0, остальные
N
sin
2
k
sin
2
N
n
k=0,1..N-1
Проблема: маскировка слабых спектральных компонент
сильными из-за высоких боковых лепестков АЧХ фильтра.
40
дБ
Амплитуды
сигналов:
30
20
А1 – 1 (0 дБ)
10
0
А2 – 0.01 (-40 дБ)
-10
А3 –0.001(-60 дБ)
-20
-30
200
300
400
500
600
700
800
Теоретические основы цифровой обработки сигналов. Слайд 135
Использование «окон» при спектральном анализе
Во временной области –
умножение сигнала на весовую
функцию «окна».
В спектральной области – свертка
спектра сигнала с частотной
характеристикой «окна».
Временные отсчеты
Временные отсчеты
Умножение на
весовую функцию
Анализатор спектра
(БПФ)
Анализатор спектра
(БПФ)
Свертка с ЧХ «окна»
(сглаживание спектра)
Спектральные отсчеты
Спектральные отсчеты
1 умножение на отсчет для всех
видов окон
Для окна Ханна порядок фильтра -3
( окно Хэмминга – без умножений).
Для окна Блэкмана порядок
фильтра - 5.
Теоретические основы цифровой обработки сигналов. Слайд 136
Использование «окон» при спектральном анализе
дБ
40
30
20
rectangular
window
Амплитуды
сигналов:
Hann
window
C hebyshev
window
А1 – 1 (0 дБ)
10
0
А2 – 0.01 (-40 дБ)
-10
А3 –0.001(-60 дБ)
-20
-30
-40
-50
200
300
400
500
600
700
800
Стратегия выбора «окна» по одному из параметров:
по скорости спадания БЛ – при большой разнице амплитуд и частот;
по максимальному уровню БЛ – при разных амплитудах и неизвестных
(распределенных в большом диапазоне) частотах;
по ширине основного лепестка АЧХ – при сопоставимых амплитудах и
близко расположенных частотах.
Теоретические основы цифровой обработки сигналов. Слайд 137
Классические методы спектрального оценивания
Задача: получить оценку спектральной плотности мощности
сигнала с минимальной среднеквадратической ошибкой по
зашумленной реализации конечной длительности.
Основные характеристики:
Диапазон анализируемых частот
Определяется частотой дискретизации Fs:
от 0 до ½ Fs для действительных сигналов;
от - ½ Fs до + ½ Fs для комплексных сигналов.
Разрешающая способность по частоте
Определяется эффективной шириной
главного лепестка ЧХ окна Be:
Be
W k
k 0
W k
max
k 0, N 1
Достоверность
Определяется относительной
среднеквадратической ошибкой Q
оценки СПМ
N 1
Q k
S k S k
S k
2
2
, k 0,1..N 1
Теоретические основы цифровой обработки сигналов. Слайд 138
Классические методы спектрального оценивания
Особенность оценки СПМ при наличии шума:
При увеличении размерности БПФ ошибка оценки СПМ не
уменьшается, так как определяется спектральной плотностью шума.
Для ее снижения необходимо усреднение спектральных оценок.
При ограниченной длине реализации случайного процесса:
Повышение достоверности оценки приводит к ухудшению
разрешающей способности;
Повышение разрешающей способности приводит к потере
достоверности оценки.
Если влияние шума пренебрежимо мало, то
Be Te 1
Te - эффективная длительность реализации.
Если необходимо усреднение оценок СПМ для повышения
достоверности, то Q Te BS 1
BS
N 1
W
k
k 0
N 1
W k
k 0
2
- статистическая ширина
2
полосы «окна»
Теоретические основы цифровой обработки сигналов. Слайд 139
Периодограммный метод оценки СПМ
Последовательность операций:
1.
Реализация процесса длиной L отсчетов разбивается на M
сегментов размером N отсчетов каждый
xm n , n 0,1,..N 1, m 1, 2..M .
2.
Вычисляется БПФ от каждого сегмента
X m k , k 0,1,..N 1, m 1, 2..M .
3.
Усредняется оценка СПМ
PX k 1
M
X m k X m* k , k 0,1..N 1
M m 1`
Для снижения потерь из-за взвешивания функцией «окна» применяется
перекрытие сегментов на ½ или ¼.
Увеличение
длины
сегмента
соответствует
улучшению
разрешающей способности и снижению достоверности
(возрастанию ошибки), и наоборот.
Теоретические основы цифровой обработки сигналов. Слайд 140
Коррелограммный метод оценки СПМ
Основан на дискретном аналоге теоремы Винера-Хинчина.
Последовательность операций:
1.
Вычислить АКФ реализации процесса в диапазоне [0,N-1]
дискретных задержек:
L 1
RX m x n x* n m , m 0,1..N 1.
n 0
2.
Вычислить ДПФ размерности N от АКФ c использованием «окна»:
2
PX k RX m exp j
k m , k 0,1..N 1.
N
m0
N 1
Увеличение диапазона задержек АКФ соответствует улучшению
разрешающей способности, и снижению достоверности
(возрастанию ошибки), и наоборот.
Рекомендуется: начинать оценку СПМ с высокой достоверности,
продвигаясь в направлении более высокого разрешения по
частоте.
Теоретические основы цифровой обработки сигналов. Слайд 141
Параметрические методы спектрального оценивания
Основные недостатки классических методов:
• низкое разрешение, ограниченное длительностью сигнала;
• маскировка слабых сигналов боковыми лепестками «окон».
Возможность устранения этих недостатков – в использовании
априорной информации об оцениваемом процессе.
Задача оценки СПМ сводится к оценке небольшого числа
параметров модели.
Источник
«белого»
шума
Линейная система
(фильтр) порядка
P
Оцениваемые параметры:
• Коэффициенты фильтра;
• Мощность шума.
+
Оцениваемый
процесс
Источник
«белого»
шума
Теоретические основы цифровой обработки сигналов. Слайд 142
Параметрические методы спектрального оценивания
Модели авторегрессии (АР) и скользящего среднего (СС):
b0
+
n i
Z-1
+
b1
x i
a1
Z-1
Z-1
Z-1
H e
j
B e
ap
q
СС:B z bn z
n 0
n
an z
АР: A z 1
n 1
P()
АР
n 0
p
j
q
Px e j
n
j n
n
j n
b
e
n
2
n 0
p
1 an e j n
n 1
P()
j
n 1
Z-1
q
j n
b
e
n
Ae
1 a e
Z-1
bq
q
P()
СС
АРСС
Теоретические основы цифровой обработки сигналов. Слайд 143
2
Параметрические методы спектрального оценивания
p
an rx m n , m 0
n 1
p
rx m an rx m , m 0
n 1
rx m , m 0
Записываем эти уравнения для
rx 0 rx 1
rx 0
rx 1
...
...
rx p rx p 1
0m p
Связь
параметров
АР – модели и
значений АКФ
процесса
в матричной форме:
... rx p 1
... rx p 1 a1 0
...
... ... ...
...
rx 0 a p 0
Нормальное
уравнение
Юла-Уолкера
для АР –
процесса
Теоретические основы цифровой обработки сигналов. Слайд 144
Параметрические методы спектрального оценивания
Методика построения оценки СПМ для АР- процесса:
• Рассчитываются значения АКФ : rx 0 , rx 1 ,...rx m ,...rx p ;
• Решается уравнение Юла-Уолкера относительно параметров
АР- модели a1 , a2 ,...a p и спектральной плотности
• Вычисляется оценка СПМ:
Px e
j
1
p
1 an e j n
2
n 1
Теоретические основы цифровой обработки сигналов. Слайд 145
;
Параметрические методы спектрального оценивания
Взаимосвязь классических и параметрических методов оценки СПМ.
rx(m)
Px(k)
истинная
СПН
m
измеренные
значения
rx(m)
истинные значения
Px(k)
окно
нулевая
экстраполяция
m
rx(m)
Px(k)
m
затухающая
экстраполяция
коррелограммная оценка
АР оценка СПМ
затухающая экстраполяция
Теоретические основы цифровой обработки сигналов. Слайд 146
Параметрические методы спектрального оценивания
Преимущества параметрических методов:
• высокое разрешение, что соответствует «длинной» АКФ;
• отсутствие боковых лепестков весовой функции «окна».
Недостатки параметрических методов:
• неопределен выбор порядка модели;
• зависимость разрешения от отношения сигнал/шум
1.03
Формула Марпла
;
f
T p Q 1
0.31
• возможная потеря устойчивости.
с / ш = 30 дБ
с / ш = 20 дБ
с / ш = 10 дБ
Теоретические основы цифровой обработки сигналов. Слайд 147
Параметрические методы спектрального оценивания
Сводная таблица
параметрических
Общие
свойства методов оценки
Недостатки
Условия
несингулярности
Преимущества
СПМ
КовариациМодифиц.
Ковариационн
Модифиц.
ЮлаЮлаБерга
Метод
Берга
КовариациМодифиц.
Юлаонный
ковариац.
ый
ковариац.
Метод
Берга
КовариациМодифициУолкера
Уолкера
ЮлаМетод
Характеристики
Метод
Берга
онный
ковариац.
Уолкера
онный
рованный
Уолкера
Не использует
Не использует
Не использует
Использует
Расположение
Может
Может
Работает
Берга
Общие
свойства
ковариациВысокое
Разрешение
Высокое
Для длинных
взвешивание
взвешивание
взвешивание
взвешивание
пиков
сильно
приводить
к
приводить
к
относительно
разрешение
блоков
онный
данных
данных
неустойчивым
плохо
для
Преимущества
для
короткой
данных
функцией
функцией
моделям
коротких
Порядок
должен
Порядок
блока -данных
при«окна»
коротких
длины
блока
разрешение
«окна»
«окна»
блоков
Модифицированный
Недостатки
быть
меньше,
быть
блоках
данных должен
данных
такое
же, как у
данных
либо равен
меньше, либо
других
ковариационный
Подвержен
Смещение
Расположение
Смещение
Минимальная
Минимальная
Минимальная
Минимальная
половине
равен 2/3
методов
расщеплению
частот
оценок
пиков
слегка
частот
оценок
СКО
СКО
СКО
СКО
размера кадра
размера
кадра
Юла-Уолкера
Условия
несингулярности
Всегда
Работоспособен
РаботоспосоВсегда
спектральных
синусоид
зависит
синусоид в
предсказания
предсказания
предсказания
предсказания
данных в
данныхот
устойчивые
для
P
чистых
бен
для
P
устойчивые
линий
при и
шуме
начальных
шуме
«вперед»
«вперед»
«вперед»
и
«вперед»
модели
гармоник в
чистых
модели
высоком
порядке
фаз
«назад»
с
«назад».
шуме
гармоник в
модели
ограничением
шуме
алгоритма
Смещение
частот
Наименьшее
ДурбинаНе
подвержен
оценок
синусоид
смещение
Левинсона
расщеплению
в шуме
частот
оценок
спектральных
синусоид в
линий
шуме
разрешение
выше,
чем у
данных
данных
зависит
отдля неустойчивым
Ковариационный
короткой длины
Юла-Уолкера
функцией
«окна»
функцией
начальных
фаз
моделям
Теоретические основы цифровой обработки сигналов. Слайд 148