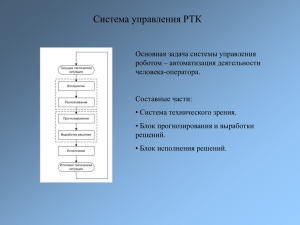
Измерительно-информационные модули
Управление мехатронными системами должно осуществляться на основании
достоверной, полной и своевременной информации.
Структурная схема передачи и обработки информации в мехатронных системах
В дальнейшем мехатронная система будет рассматриваться с позиции анализа
информационных систем, т. е. систем, осуществляющих сбор, передачу, обработку, хранение
и представление информации с применением вычислительной техники (СЛАЙД 1).
Сбор информации в мехатронных системах начинается с использования датчиков. В
общем случае датчик выполняет набор преобразований над сигналом (или совокупностью
сигналов), вырабатываемых сенсором.
Основной задачей сенсора является преобразование измеряемой (в данном случае не
различаем понятия «измерение» и «оценка») величины в электрический сигнал. То есть,
сенсор является Х-электрическим преобразователем.
Электрический сигнал, получаемый с сенсора, далее проходит ряд преобразований.
Прежде всего, выходной сигнал сенсора усиливается, в некоторых случаях нормируется или
компандируется, фильтруется и преобразовывается в цифровую форму.
Усиление выходного сигнала сенсора необходимо для того, чтобы привести его
уровень (напряжение или силу тока) к величине, удобной для дальнейшего использования.
Например,
выходной
сигнал
термопары
(термоэлектрического
преобразователя,
использующего эффект «возникновения» разности потенциалов на контакте разнородных по
физико-химическим свойствам металлов) составляет десятки или «даже» сотни микровольт,
в то время как сенсор напряжения в высоковольтной линии электропередач оперирует
значениями в десятки киловольт.
Операция нормирования используется в тех случаях, когда абсолютное значение
измеряемой величины не важно, а необходимо оценивать ее изменение. Например, уровень
громкости звука, воспринимаемый человеческим ухом, пропорционален производной
изменения давления и не зависит (в пределах «механический прочности» барабанных
перепонок) от абсолютной величины давления. В таких случаях выходной сигнал сенсора
подвергают усилению с переменным коэффициентом усиления с целью обеспечения на
выходе электрического сигнала, лежащего в заданном диапазоне.
В тех случаях, когда диапазон изменения измеряемой величины составляет несколько
(три и более) декад, применяется операция компандирования. Компандирование является
нелинейной
операцией,
сужающей
динамический
диапазон
сигнала.
Операции
компандирования и обратная ей операция экспнадирования являются совершенно
1
естественными для человека - практически все органы чувств имеют логарифмический
характер чувствительности. Это относится и к восприятию громкости, и к восприятию
освещенности, и т. д.
Основная идея, лежащая под операцией компандирования, заключается в стремлении
представить большой диапазон изменения измеряемой величины электрическим сигналом,
изменяющимся в значительно меньших пределах.
Следующей типовой операцией по преобразованию выходного сигнала сенсоров
является
фильтрация.
Фильтрация
–
выделение
(подчеркивание)
некоторых
характеристик, которые, как считается, должны присутствовать в выходном сигнале
сенсора. Чаще всего фильтрация применяется для «очистки» выходного сигнала сенсора от
помех. Например, рассмотрим измерение температуры с помощью термопары (см. СЛАЙД
1 снизу).
Как показано на рисунке, возникающая в термопаре ЭДС приводит к возникновению
падения напряжения на измерительном сопротивлении. Однако проводники, соединяющие
термопару с измерительным сопротивлением, выполняют роль антенны, достаточно хорошо
воспринимающей
помехи:
от
ЛЭП
(переменный
ток
промышленной
частоты)
электромагнитное излучение, вызванное переменным сечением ширины и проводимости
дугового разряда между щитками и коллектором электродвигателя и т. д. Кроме того, в
данном случае нельзя пренебрегать и тепловым шумом в самом измерительном
сопротивлении.
В отличие от помех, имеющих в качестве неотъемлемой характеристики высокую
скорость изменения (магнитное поле от ЛЭП, электромагнитное излучение от дугового
разряда),
измеряемая
величина
(температура)
характеризуется
малой
величиной
производной. Поэтому в немалой степени от помех можно «избавиться», поставив фильтр
нижних частот в тракт преобразования выходного сигнала термопары.
2
До сих пор сигнал с выхода сенсора, проходящий ряд функциональных
преобразований, рассматривался как непрерывная функция времени. Такие сигналы принято
называть аналоговыми. Использование аналоговых сигналов в цифровых вычислительных
системах требует введения еще нескольких функциональных преобразований.
Первый вид преобразования, приближающего аналоговый сигнал к цифровым
системам, носит название дискретизация по времени.
Дискретизированный сигнал представляется в виде набора импульсов, равномерно
распределенных по оси времени с шагом, пропорциональным частоте дискретизации.
Причем площадь (энергия) импульсов пропорциональна величине исходного (аналогового)
сигнала в соответствующие моменты времени.
При наложении определенных ограничений на частоту дискретизации вместо
исходного сигнала может быть использован дискретизированный по времени «двойник»,
сохраняющий все свойства исходного сигнала. Из курса ТАУ известно, что по теореме
Найквиста аналоговый сигнал, ограниченный по спектру частотой ɷ, может быть без потерь
дискретизирован, а затем восстановлен при частоте дискретизации не меньше, чем 2ɷ.
В качестве примера использования дискретизированного по времени сигнала
рассмотрим подключение акселерометра к измерительной системе.
Чтобы уменьшить (или даже полностью исключить) влияние помех и наводок на
соединительный кабель на достоверность передачи информации (показаний сенсора), можно
совместить на одном кристалле как сенсор, так и блок первичной обработки сигналов.
Последний должен состоять из усилителя и устройства дискретизации по времени (СЛАЙД
1).
В качестве дискретизатора часто используются широтно-импульсные модуляторы,
которые формируют последовательности прямоугольных импульсов, следующих с
постоянной частотой, но имеющих длительность, пропорциональную уровню входного
(аналогового) сигнала (СЛАЙД 1).
В результате сигнал, предназначенный для передачи по кабельной линии под
воздействием помех, заключает информацию о состоянии сенсора не в уровне (амплитуде),
а в длительности импульсов, что обеспечивает (потенциально) малое влияние помех на
достоверность измерений.
Другое направление приближения аналоговых сигналов к цифровым системам
заключается в квантовании сигналов по уровню. При этом заранее оговаривается
3
максимальное (конечное и, обычно, равное 2х) число и величина уровней сигнала.
Шаг квантования является основной характеристикой операции и соответствует
расстоянию между соседними уровнями квантованного сигнала (шаг может быть как
постоянным, так и переменным, зависящим от уровня аналогового сигнала).
Операции дискретизации по времени и квантования по уровню обычно совмещают с
целью получения цифровых сигналов. Цифровой сигнал представляется в виде набора
отсчетов (мгновенных измерений уровня аналогового сигнала, представленных с точностью
до шага квантования), взятых через определенные интервалы времени (с заданной частотой
дискретизации). Именно цифровые сигналы являются естественными для использования в
вычислительных системах.
Над цифровыми сигналами, равно как и над аналоговыми, могут быть выполнены
функциональные преобразования, описанные выше. Например, усиление аналогового
сигнала эквивалентно умножению отчетов цифрового сигнала на константу.
Появление цифровых сигналов в информационной системе приводит к новому типу
функциональных преобразований - кодированию. (СЛАЙД 2) В узком смысле кодирование
есть преобразование дискретных сообщений (сигналов) в последовательность кодовых
символов, формируемую по определенному правилу. Множество всех последовательностей
кодовых символов образует код. Совокупность кодовых символов, из которых строятся
последовательности, - кодовый алфавит, а количество кодовых символов – основание кода.
Кодирование тесно связано с понятием информации. Информация – мера
неопределенности наших знаний об окружающее нас действительности.
4
Различают так называемое экономное кодирование – такой способ кодирования,
который обеспечивает минимальную длину кодовых комбинаций при отсутствии
информационных потерь в передаваемых сообщениях. Этот способ позволяет представить
данные в виде минимального по размеру набора элементарных символов. Однако, при
передаче этих наборов символов (кодовых комбинаций) по реальным каналам связи
неизбежно будут наблюдаться искажения. При экономном кодировании определить
правильность принятой кодовой комбинации (т. е. ее полное совпадение с переданной
комбинацией) не представляется возможным. Поэтому, для борьбы с искажениями данных
при передаче по зашумленным каналам связи применяют такой прием, как добавление
избыточных (проверочных) символов к передаваемым кодовым комбинациям. Такой подход
получил названием помехоустойчивого кодирования.
Простейшим приемом помехоустойчивого кодирования, нашедшим широчайшее
применение в вычислительной технике, является использование контроля по четности. При
этом к кодовой комбинации, состоящей из набора бинарных символов, добавляется один
символ, значение которого устанавливается таким образом, чтобы суммарное количество
единичных символов в кодовой комбинации было четным (или нечетным). На приемном
конце канала связи, по окончании приема полной кодовой комбинации, производится
подсчет числа единичных символов и, если это количество является четным (нечетным), то
принимается решение о правильности принятой комбинации. Контроль по четности
позволяет за счет увеличения длины кодовой комбинации на один бинарный символ
выявлять все ошибки в канале связи, приводящие к искажению одного (любого) символа
кодовой комбинации. При искажении двух и более символов, кодовая комбинация может
быть ошибочно опознана как правильная (допустимая).
Еще одним направлением, в котором применяется кодирование, является обеспечение
конфиденциальности
при
передаче
данных
по
каналам
связи,
допускающим
несанкционированных доступ к передаваемым данным. В данном случае кодирование,
называемое шифрованием, позволяет трансформировать исходные информационные
сообщения таким образом, что в полученных кодовых комбинациях становится
затруднительным выделение последовательности информационных символов.
Примеры измерительно-информационных модулей.
Механолюминесцентные сенсорные устройства
Механолюминесцентные сенсорные элементы (СЭ) работают по принципу прямого
преобразования механической энергии упруго-пластической деформации в энергию
оптического излучения. При этом использование выходных световых сигналов решает
5
задачи
сопряжения
сенсоров
с
волоконными
линиями
связи
и
повышения
помехоустойчивости к электромагнитным помехам; отсутствие движущихся частей,
твердотельность
и
планарность
сенсора
обеспечивает
надежность
и
повышает
информативность.
Конструктивно Механолюминесцентные сенсоры давления (МЛСД) представляет
собой тонкослойный элемент, в состав которого входит мелкодисперсный порошок
люминофора и прозрачный связующий материал. Оптимальная толщина сенсорного
элемента не превышает 20... 100 мкм. Малая толщина позволяет изготавливать миниатюрные
гибкие пленочные конструкции, которые можно встраивать в различные конструктивные
элементы мехатронных систем, подвергающиеся внешним механическим воздействиям.
Связь между МЛСД и блоком обработки информации осуществляется с помощью
оптических волокон или через открытое оптическое пространство. Обобщенная структурная
схема МЛСД, детализирующая процесс преобразо-вания энергии в информационной цепи,
показана на СЛАЙДЕ 3.
Схема соответствует структуре оптопары и включает в себя МЛСД (излучатель),
фотоприемник (ФП) и оптический канал связи между ними. Здесь на входе СЭ действует
импульс давления σ(t), вызывающий пластическую деформацию кристаллов люминофора.
При деформировании люминофор генерирует световой импульс Ф(t).
Можно выделить два основных варианта конструкции МЛСД в зависимости от
пространственно-геометрических параметров СЭ. МЛСД сосредоточенного типа имеет
площадь СЭ, приблизительно равную площади ФП. Здесь неравномерностью распределения
давления по площади сенсора можно пренебречь. В качестве подложки сенсора могут
использоваться полимерная пленка, оптическая керамика, компоненты обычной и
волоконной оптики. Сосредоточенный МЛСД может быть нанесен непосредственно на торец
волоконного световода (жгута или кабеля), как показано на СЛАЙДЕ 3 снизу слева.
Информативными признаками сигнала сосредоточенного МЛСД являются его временные и
амплитудные параметры.
МЛСД распределенного типа имеет площадь сенсорного элемента, значительно
превышающую площадь входного окна ФП. Сенсор может быть распределен как по
площади, так и по длине, например, волоконного световода. В этом случае либо при
изготовлении в оптическое стекло добавляется люминесцентный порошок, либо на готовое
волокно специальным образом наносится дополнительное люминесцентное покрытие.
МЛСД с распределенным по площади СЭ реализует функцию визуализации полей давления
и обладает свойством тактильной чувствительности. Такой сенсор может быть изготовлен в
виде тонкой гибкой пленки, панели или оболочки произвольной формы. Выходной сигнал
6
такого датчика имеет модуляцию не только во времени, но и в пространстве. Это свойство
позволяет воспроизводить в виде световых образов процессы контактного ударного
взаимодействия сложноконтурных объектов с распределенным сенсорным элементом
СЛАЙД 3 снизу справа. Выходные сигналы распределенных МЛСД необходимо
регистрировать матричными ФП.
Третий вариант конструктивного исполнения МЛСД можно назвать встроенным или
интегрированным в конструкцию изделия. Здесь СЭ (механолюминесцентный материал)
распределен в объеме несущих элементов конструкций, например, изготовленных из
непрозрачных композиционных материалов. Световой сигнал от сенсоров может
передаваться по армирующим кварцевым волокнам самого композита. Для этого волокна
располагаются в конструкции определенным образом.
Использование в разных конструкциях сенсоров, имеющих разные оптические
спектры генерируемого сигнала, позволяет определять место механического воздействия. По
амплитуде и длительности светового импульса можно судить о силе воздействия и степени
разрушения композитной конструкции. Такие элементы конструкции приобретают свойство
самодиагностики при воздействии на них периодических ударных воздействий.
Двухкоординатный датчик силы
Такие датчики находят свое применение в конструкциях микроманипуляторов. На
СЛАЙДЕ 4 показан такой микроманипулятор с выходным звеном 1. Он имеет микрокапиляр
2, закрепленную в центре крестообразной кремниевой диафрагмой 3. Качательное движение
микрокапиляра 2, который взаимодействует с объектом 5, осуществляется в двух
направлениях
х
и
у
относительно
корпуса
4
с
помощью
двухкоординатного
электромагнитного привода 6. Перемещение микрокапиляра 2 вдоль оси z осуществляется за
счет перемещения корпуса 4.
Двухкоординатный датчик силы располагается на диафрагме 3. Он состоит из восьми
пьезорезистивных элементов 7, расположенных в местах крепления перемычек 8
крестообразной диафрагмы 3 (в этих местах изгибные деформации максимальны).
Пьезорезистивные элементы 7 соединены электропроводящими дорожками с аналогоцифровыми преобразователями сигналов и интерфейсами 9. При отклонении микрокапиляра
2 от оси z пьезорезистивные элементы 7 будут испытывать различные деформации, в
соответствии с которыми их омические сопротивления будут изменяться. Информация от
пьезорезистивных элементов 7 через аналого-цифровые преобразователи и интерфейсы
будет поступать в систему управления, которая в свою очередь выдаст сигналы на
двухкоординатный электромагнитный привод 6.
7
Тема 14. Модули систем управления исполнительного уровня
Назначение исполнительного уровня управления в обеспечении заданных требований
по устойчивости, точности и качеству переходных процессов в системе при достижении цели
управления, которая поступает с тактического уровня управления. системы автоматического
регулирования с параллельными обратными связями.
Модули систем управления
Иерархия и неопределенность систем управления
Структура модулей систем управления предполагает многоуровневую организацию и
включает стратегический, тактический и исполнительный уровни управления (СЛАЙД 5),
имеющие доступ к сенсорной информации для решения задач управления данного уровня.
Следует подчеркнуть, что принцип иерархического построения систем управления
сложными динамическими объектами сам по себе не является оригинальным. Он был
сформулирован еще на рубеже семидесятых-восьмидесятых годов применительно к
проблемам
управления
иерархического
многофункциональными
построения
систем
управления
роботами.
Новая
определяет
концепция
необходимость
интеллектуализации каждого из уровней управления. Рассмотрим задачи, решаемые на
каждом уровне управления.
Стратегический уровень управления предназначен для планирования движения
мехатронной системы в условиях неполной информации о внешней среде и объекте
управления. Планирование движений предполагает разбиение задачи движения на
последовательность согласованных во времени действий, оперативную коррекцию движения
с учетом изменения среды и формализацию целей управления для каждого из этих действий.
Формализация целей управления означает, что для каждого действия должны быть
записаны математические соотношения, выполнение которых обеспечивает успешное
выполнение каждого действия. Сенсоры стратегического уровня должны соответствовать
органам чувств человека (техническое зрение, тактильное и силомоментное очувствление,
устройство анализа звуковых и ультразвуковых сигналов и т. д.).
Тактический уровень выполняет преобразование команд управления движением,
поступающих со стратегического уровня управления в программу управления, которая
определяет законы согласованного движения во времени всех звеньев механического
устройства мехатронной системы с учетом технических характеристик блока приводов (в
первую очередь ограничений на обобщенные скорости, ускорения и силы).
8
На исполнительном уровне выполняется расчет и выдача управляющих сигналов на
блок приводов мехатронной системы в соответствии с программой управления и с учетом
технических характеристик силовых преобразователей.
Для иерархических систем управления в мехатронике действует принцип,
сформулированный в 1989 г. проф. Саридисом (Saridis G.N.), согласно которому по мере
продвижения от высших к низшим уровням управления понижается интеллектуальность
системы, но повышается ее точность.
При этом под «интеллектуальностью» понимается способность системы приобретать
специальные знания, позволяющие уточнить поставленную задачу и определить пути ее
решения, а под «неточностью» - неопределенность в операциях по решению данной задачи.
Датчики
тактического
и
исполнительного
уровней
должны
обеспечивать
достоверную информацию о состоянии системы и объекта управления, а также адекватность
преобразуемой информации целям функционирования мехатронной системы.
При управлении сложными динамическими объектами в реальных условиях
возникает неопределенность, связанная с формированием управляющих воздействий по
измеряемой и априорной информации.
Анализ источников неопределенности позволяет разделить неопределенность на два
вида: предсказуемую и непредсказуемую.
Предсказуемая неопределенность имеет место в том случае, когда известна априорная
информация о характере закона изменения управляемых координат. Например, траектории
движения рабочего органа робота, уравнения движения по которым известны, можно
аппроксимировать конечным набором сплайнов; при этом неопределенность будет
заключаться
только
в
выборе
соответствующего
сплайна.
А
непредсказуемая
неопределенность имеет место, когда такой информации нет.
Так, например, для сборочных роботов, которые работают в рамках определенного
набора технологических движений, характерных для сборочного роботизированного
процесса, неопределенность может быть классифицирована как предсказуемая. Роботы,
предназначенные
для
экстремальных
сред,
в
основном
работают
в
условиях
непредсказуемой неопределенности, так как траекторию их движения нельзя заранее
предсказать.
Такой подход позволил выделить два класса интеллектуальных систем управления,
принципиально отличающихся по архитектуре, принципу действия и области применения.
Интеллектуальные системы управления I рода предназначены для работы в условиях
предсказуемой неопределенности, в основном связанной с взаимным влиянием отдельных
степеней подвижности сложного многозвенного объекта управления друг на друга.
9
Интеллектуальные системы управления II рода ориентированы на работу в условиях
непредсказуемой неопределенности и функционируют на основе реализации своих
адаптивных свойств за счет использования технологии ассоциативной памяти.
Системы управления в условиях неопределенности, как правило, строятся по
иерархическому
принципу.
На
СЛАЙДЕ
6
представлена
иерархическая
схема
интеллектуальной системы управления I рода, обеспечивающая работу в условиях
предсказуемой неопределенности.
На стратегическом уровне управления формируются траектория и динамические
характеристики движения по ней. Функции интеллектуального регулятора распределяются
на тактическом и исполнительном уровнях. На тактическом уровне управления путем
решения обратной задачи кинематики формируются программные обобщенные координаты.
В результате решения обратной задачи динамики (по известной модели объекта управления
и априорной информации о зависимости структуры и параметров объекта от траектории
движения) определяются структура и параметры регулятора, которые реализуются на
исполнительном уровне и могут меняться в процессе функционирования. Коррекция
программной траектории проводится по реальной траектории, вычисленной решением
прямой задачи кинематики для реальных значений обобщенных координат. Так как в
предложенном подходе в отдельных приводах контролируются только собственные
обобщенные координаты, то учет изменения динамических свойств объекта фактически
сводится к развязке приводов.
Для
обеспечения
развязки
приводов
в
условиях
ограниченной
мощности
вычислительных средств предлагается, используя знания о специфике выполняемого
автоматизированного технологического процесса, кинематической схеме и динамических
характеристиках производственного оборудования, осуществлять движение рабочего органа
по специальным траекториям. Эти траектории, названные технологическими движениями,
выбираются таким образом, чтобы, с одной стороны, они обеспечивали заданный
технологический процесс, а с другой - удовлетворяли наиболее простым уравнениям
динамики (что позволяет решать их в реальном масштабе времени на основе вычисления
скоростей и ускорений отдельных приводов, осуществляя тем самым развязку). При таком
подходе необходимость в обмене информацией между отдельными приводами полностью
отпадает.
На СЛАЙДЕ 7 сверху приведена функциональная схема интеллектуальной системы
управления I рода, в которой устройство, названное лингвистическим аппроксиматором
(JIA), заменяет траекторию движения рабочего органа робота набором специальных
траекторий (сплайнов). С помощью лингвистического аппроксиматора из базы моделей и
10
управлении (БМУ) выбираются соответствующие настройки регулятора, структура и
параметры которого определяются типом аппроксимирующего технологического движения
рабочего органа и зависят от измеряемых скоростей и ускорений только данного привода.
Работа интеллектуальной системы управления I рода осуществляется на основе
знаний, содержащихся в JIA и БМУ и базирующихся на:
анализе автоматизированного технологического процесса;
анализе кинематических схем и уравнений динамики производственного
оборудования;
теории автоматического управления и обратных задачах динамики.
Учитывая сложность алгоритмов управления, реализующих учет взаимосвязности
степеней подвижности в объекте, для обеспечения необходимого быстродействия системы
JIA, БМУ и регулятор строятся на базе ассоциативной памяти. Адаптация к изменяющимся
параметрам и структуре объекта по каждой степени подвижности происходит на основе
прогнозирования поведения других степеней подвижности и их влияния на данную степень.
На СЛАЙДЕ 7 снизу представлена функциональная схема интеллектуальной
системы управления II рода, обеспечивающей режим адаптации в условиях непредсказуемой
неопределенности.
Классификатор состояния объекта управления и формирователь управлений (в
данном случае речь идет о формировании управляющих воздействий непосредственно на
объект управления) реализуются на ассоциативной памяти, в которой на основании
информации о входных и выходных сигналах объекта управления:
производится классификация состояния объекта;
формируется вектор настраиваемых параметров и соответствующее ему и
входному заданию управляющее воздействие.
Таким образом, работа в условиях непредсказуемой неопределенности, когда не
известно, как в следующий момент времени поведет себя сложный динамический объект,
приводит к тому, что строить и анализировать математические модели, отражающие
специфику взаимодействия и взаимного влияния отдельных его частей, не имеет смысла изза их сложности и практической неадекватности реальному объекту.
Неадекватность моделей, как правило, вызвана погрешностями измерений и
вычислений, упрощением моделей и отличием параметров реальных систем от модельных.
Это приводит к тому, что в иерархической системе управления (СЛАЙД 8), обеспечивающей
эффективную работу в условиях непредсказуемой неопределенности, учет динамических
свойств объекта управления должен происходить на исполнительном уровне, который в
11
свою очередь должен гарантировать выполнение заданий тактического уровня на требуемых
скоростях.
Такое построение системы управления приводит к тому, что на приводном уровне
сложные
динамические
объекты
управления
считаются
не
распределенными
и
взаимосвязанными по исполнительным осям, а сосредоточенными и односвязными с
переменными динамическими параметрами и возмущениями, приведенными к валам
исполнительных двигателей.
На тактическом уровне должна решаться только кинематическая задача, которая
отражает статические свойства объекта. В соответствии с требуемой траекторией
исполнительного органа, скоростями и ускорениями движения в опорной системе координат
на тактическом уровне вычисляются заданные скорости и ускорения обобщенных координат,
а на приводном уровне регулятор с адаптивной подстройкой параметров обеспечивает их
отработку. Качество выполнения заданий контролируется по вычисленным с помощью
решения прямой задачи кинематики координатам реального состояния объекта, и при
необходимости производится корректировка траектории.
Степень интеллектуальности систем управления (убрать наверх в соотв.тему
перед «в малом, в большом, в целом»)
Под степенью интеллектуальности системы будем понимать ее способность работать
с базой внешних событий или ситуаций для привлечения знаний, позволяющих уточнить
предложенную задачу и наметить пути ее решения.
С целью более четкого определения класса интеллектуальных систем управления
рассмотрим пять принципов организации интеллектуальных систем управления:
наличие тесного информационного взаимодействия управляющих систем с
реальным внешним миром и использование специально организованных
информационных каналов связи;
принципиальная открытость систем для повышения интеллектуальности и
совершенствования собственного поведения;
наличие механизмов прогноза изменений внешнего мира и собственного
поведения системы в динамически меняющемся внешнем мире;
построение управляющей системы в виде многоуровневой иерархической
структуры в соответствии с правилом: повышение интеллектуальности и
снижение требований к точности по мере повышения ранга иерархии в системе
(и наоборот);
12
сохраняемость функционирования (возможно, с некоторой потерей качества
или эффективности) при разрыве связей или потере управляющих воздействий
от высших уровней иерархии управляющей структуры.
Более подробно принципы организации структуры интеллектуальной системы
управления мы с вами рассматривали ранее. Необходимо отметить, что для их в
интеллектуальной системе управления необходимо предусмотреть следующие слои
обработки неопределенной информации (слои интеллектуальности):
-
слой прогноза событий;
-
слой самообучения и адаптации;
-
слой работы с базами событий, знаний и формирования решений;
-
исполнительный слой.
Каждый из перечисленных слоев имеет свою функциональную специфику и в
реальной системе может состоять из нескольких уровней. При этом в самом нижнем
исполнительном слое могут использоваться классические модели САУ. Все остальные слои
более высокого ранга можно рассматривать как надстройку над традиционными
классическими моделями, отвечающую требованиям современной информационной
технологии работы со знаниями и существенно расширяющую возможность этих моделей.
Модули систем управлении исполнительного уровня
На нижнем исполнительном слое используются классические модели САР и САУ.
Эти модели подробно изучаются в курсе «Теория автоматического управления»
Назначение исполнительного уровня управления состоит в обеспечении заданных
требований по устойчивости, точности и качеству переходных процессов в системе при
достижении цели управления, которая поступает с тактического уровня управления. При
этом конкретная структура системы управления зависит от того, на каком уровне
интеллектуальности (каком слое обработки неопределенной информации) она реализуется.
Исполнительный
уровень
на
исполнительном
слое
обычно
реализуется
с
использованием контроллеров с обратной связью, т.е. модуль управления является
замкнутым на приводном (исполнительном) уровне. Принцип разомкнутого управления в
настоящее время используется только в системах управления шаговыми двигателями (в
графопостроителях, плоттерах, поворотных столах и других устройствах, которые не
испытывают существенных возмущающих воздействий).
В оборудовании автоматизированного машиностроения (металлорежущие станки,
технологические роботы) обеспечить приемлемую точность движения можно только
13
используя замкнутые системы управления. При этом на контроллерах чаще всего
реализуется
алгоритм
ПИД-регулировапия,
когда
выходной
сигнал
описывается
выражением (см. СЛАЙД 9)
где
КП,
Кд,
Ки
-
коэффициенты,
соответственно,
пропорциональной,
дифференциальной и интегральной составляющих сигнала e(t); e(t) - сигнал ошибки в данном
контуре управления (например, положения, скорости или крутящего момента).
В конкретных случаях некоторые из этих коэффициентов можно положить равными
нулю, фактически применяя упрощенные алгоритмы управления (П-алгоритм, ПИ-алгоритм,
ПД-алгоритм). Популярность ПИД- регуляторов можно в какой-то степени объяснить их
робастностью (способностью сохранять устойчивость при достаточно малых изменениях
параметров объекта) в самых различных условиях работы и с другой стороны их
функциональной простотой. Чтобы применить такой регулятор в системе управления
конкретным объектом, надо просто настроить три параметра КП , Кд и Ки.
Общая структурная схема системы управления, реализуемая типовым контроллером,
представлена на СЛАЙДЕ 9 снизу. Для задач автоматизированного машиностроения
входными воздействиями для системы могут быть, в зависимости от поставленной цели
управления, управляющие сигналы по положению, скорости, развиваемому усилию, либо по
всем трем вместе. В системе реализуется принцип замкнутого управления, что
предусматривает наличие соответствующих обратных связей (измерений) по фазовым
координатам системы.
Традиционный подход предусматривает, что структура и коэффициенты всех
корректирующих устройств определяются при проектировании системы и далее остаются
фиксированными в процессе ее эксплуатации. В современных системах управления вид и
параметры регуляторов автоматически модифицируются в зависимости от цели конкретного
движения и условий, в которых оно фактически осуществляется. Это позволяет адаптировать
(приспособить) движение мехатронной системы к начальной неопределенности и
изменяющимся условиям работы. Адаптация, по существу, есть оптимизация в условиях
недостаточной априорной информации.
Адаптивная настройки регуляторов необходима, если введенные отрицательные
обратные связи в исполнительных приводах не способны парировать влияние возмущающих
воздействий и изменения параметров (и, возможно, структуры) объекта управления, которые
вызывают недопустимое снижение показателей качества
управляемого движения.
Разработчик должен отдавать себе отчет в том, что адаптивные регуляторы по сравнению с
14
традиционными имеют существенно более сложную структуру и техническую реализацию,
их проектирование требует решения целого ряда теоретических проблем управления.
Поэтому решение о применении адаптивного регулятора в мехатронных системах должно
быть обязательно технологически и технически обосновано. Законы настройки регуляторов
определяются либо набором алгоритмов и правил, сформулированным разработчиком на
базе имеющегося опыта, либо на основании знаний, накопленных самой машиной в процессе
анализа ее предшествующих действий. Рассмотрим некоторые современные методы
построения адаптивных регуляторов.
Управляющая система (регулятор), автоматически определяющая нужный закон
управления посредством анализа поведения объекта при текущем управлении, называется
адаптивной. Теория адаптивного управления зародилась в конце 40-х - начале 50-х годов XX
столетия, однако интерес к этой области не ослабевает и по сей день.
Адаптивные системы можно разделить на два больших класса: самоорганизующиеся
и самонастраивающиеся.
В самоорганизующихся системах в процессе функционирования происходит
формирование алгоритма управления (его структуры и параметров), позволяющего
оптимизировать систему с точки зрения поставленной цели управления (ЦУ). Такого рода
задача возникает, например, в условиях изменения структуры и параметров объекта
управления в зависимости от режима функционирования, когда априорной информации
недостаточно для определения текущего режима.
Если структура объекта управления известна и неизменна, то поведение зависит от
ряда неизвестных параметров. Эта задача решается в классе самонастраивающихся систем
(СНС), в которых структура регулятора задана (заранее выбрана) и требуется определить
лишь алгоритм настройки его коэффициентов (алгоритм адаптации).
CНC делятся на два подкласса: поисковые и беспоисковые. В поисковых СНС
минимум (или максимум) меры качества (производительность установки, расход топлива и
т. д.) ищется с помощью специально организованных поисковых сигналов. Простейшими
поисковыми системами являются большинство экстремальных систем, в которых недостаток
априорной информации восполняется за счет текущей информации, получаемой в виде
реакции объекта на искусственно вводимые поисковые (пробные, тестовые) воздействия.
В беспоисковых СНС в явном или неявном виде имеется модель с желаемыми
динамическими характеристиками. Задача алгоритма адаптации состоит в настройке
коэффициентов регулятора таким образом, чтобы свести рассогласование между объектом
управления и моделью к нулю. Такое управление называют прямым адаптивным
управлением, а системы - адаптивными системами с эталонной моделью.
15
В случае непрямого адаптивного управления сначала проводят идентификацию
объекта, а затем определяют соответствующие коэффициенты регулятора. Такие регуляторы
называются самонастраивающимися.
При прямом адаптивном управлении контуры адаптации работают по замкнутому
циклу. Это позволяет парировать изменения параметров объекта и регулятора. Однако
каждый контур самонастройки повышает порядок системы как минимум на единицу и при
этом существенно влияет на общую динамику замкнутой системы.
В случае непрямого адаптивного управления контуры самонастройки работают по
разомкнутому циклу и, следовательно, не влияют на динамику системы. Однако все ошибки
идентификации, уходы параметров объекта и регулятора существенно влияют на точность
управления.
В беспоисковых самонастраивающихся системах эталонная модель может быть
реализована в виде реального динамического звена (явная модель) или присутствовать в виде
некоторого эталонного управления, связывающего регулируемые переменные и их
производные (неявная модель). В неявной модели коэффициенты эталонного уравнения
являются параметрами алгоритма адаптации.
Модули систем управления тактического уровня
В качестве примера модуля управления тактического уровня на исполнительном слое
рассмотрим систему управления движения и обнаружения мин мобильного робота,
предназначенного для разминирования минных полей.
На СЛАЙДЕ 11 изображена структура распределенной системы управления роботом
Эта система обеспечивает дистанционное управление с безопасного расстояния в
автоматическом режиме или в режиме телеуправления оператора. Центральный компьютер
реализует главные алгоритмы транспортных роботов и навигационных траекторий
движения, а также траекторий поискового сканирования. Бортовой компьютер управляет
исполнительными системами робота. Он передает все данные с датчиков на центральный
компьютер. Бортовым компьютером управляет центральный компьютер, который находится
в безопасной зоне и анализирует текущую информацию с робота. Оператор может изменять
алгоритм движения согласно ситуации.
Датчик положения робота и электронный компас используют для навигации, по ним
определяют позицию и ориентацию робота относительно внешних точек отсчета.
Ультразвуковую систему используют для идентификации и обхода препятствий.
Обычно это кольцо из нескольких ультразвуковых преобразователей. Также современные
технологии предполагают использование лидаров и оптических камер технического зрения.
16
Оптический датчик позволяет измерять и гибко менять шаг в пределах рабочего хода
цилиндров. Этот режим используют для точного сканирования областей обнаружения и
обхода препятствий любой формы по периметру. Оптические датчики располагаются на
продольных и поперечных пневматических цилиндрах. В альтернативу данным датчикам
можно использовать сервоприводы с шаговыми двигателями в состав которых уже входят
датчики положения.
Локализация робота выполняется с помощью анализа информации с датчиков
положения робота, инерционных датчиков, электронного компаса и триангуляционной
системы.
Блок обнаружения в зависимости от предназначения робота может состоять из
металлодетектора, инфракрасного датчика, химического сенсора и т.д..
Модули систем управления на стратегическом уровне
Человек совершает во внешней среде два вида движения - манипуляции и локомоции.
Манипуляция (от французского слова meatus- рука) - это движение рук при выполнении
какой-либо работы. Локомоции (от латинских слов locus -место и motto - движение) - это
движение всего тела для осуществления перемещений во внешней среде с помощью ног,
иногда использует руки.
На СЛАЙДЕ 12 показана обобщенная функциональная схема систем управления
движениями тела человека, в которые входят пассивная часть -скелет, ее активная
(движущая) часть - мышцы, чувствительные устройства -рецепторы и информационноуправляющая система - центральная нервная система (ЦНС). Скелет (его часть, которая
участвует в движении) представляет собой вместе с мышцами объект управления в виде
подвижно соединенных костных звеньев, образующих с позиций механики многозвенные
кинематические цепи, подобные манипуляторам роботов. Управление этим объектом
осуществляет ЦНС на основе информации, получаемой от рецепторов.
Основное назначение этой системы управления - подержание позы, ориентация (во
внешней среде), перемещение тела в пространстве - локомоции и, наконец, манипуляции.
Система управления движениями человека является иерархической, и в ней можно
выделить следующие пять уровней управления:
стратегический уровень (принятие решения о выполнении определенных
действий на основе мотиваций);
тактический уровень;
17
три динамических (исполнительских) уровня (исполнение движений путем
управления мышцами на основе внешней информации, рефлекторного
связанного
управления
несколькими
звеньями
тела,
рефлекторного
управления отдельными звеньями).
На СЛАЙДЕ 13 общая функциональная схема иерархической системы управления
движениями человека.
На стратегическом уровне определяются цели, и осуществляется контроль за их
реализацией, включая оперативную корректировку этих действий и самих целей в
зависимости от эффективности процесса их достижения. После завершения действий здесь
же оцениваются достигнутые результаты. Этот уровень и сам непосредственно участвует в
реализации наиболее сложных и новых движений.
На стратегическом уровне выбранная основная цель обычно разбивается на
отдельные подцели, которые последовательно выдаются на тактический уровень. Работа
тактического уровня начинается каждый раз с формирования моделей среды и организма,
ориентированных на спущенную очередную цель, и с высвобождения из памяти
отработанных ранее соответствующих планов действий, в которых эта цель в свою очередь
может разбиваться на еще более мелкие тактические подцели.
Для
выбора
тактики
достижения
заданной
сверху
цели
и
составления
соответствующего плана действий необходимо знать внешнюю обстановку и состояние
организма. Этому служат модели внешней среды и тела, которые формируются и
непрерывно корректируются на основе получаемой сенсорной информации. При этом для
каждой конкретной цели эти модели преобразуются, ориентируясь на эту цель, путем
выделения наиболее существенных для ее достижения особенностей и деталей.
Используемая на этом уровне информация перерабатывается таким образом, что
содержит уже не количественные, а обобщенные качественные характеристики объектов, т.е.
здесь применяется не метрика предметов и действий с ними, а их топология и понятия (буква,
стул и т. п.).
На функциональной схеме показаны также прямые управляющие воздействия, сверху
вниз, минующие отдельные промежуточные уровни (пирамидный путь), идущие вверх
каналы обратной связи и взаимодействия на модели среды и тела со стороны стратегического
и тактического уровней, осуществляющие подстройки этих моделей под очередную
конкретную задачу и используемые для прогнозирования результатов планируемых
действий.
18
Завершая рассмотрение этой системы управления, еще раз подчеркнем, что каждый
ее уровень реализует порученную ему операцию путем разбиения на более мелкие типовые
операции, находящиеся в арсенале следующего уровня, и последовательной выдачи этому
уровню соответствующих команд.
Наряду с таким последовательным иерархическим процессом управления здесь, вопервых, осуществляются, как уже упоминалось, прямые воздействия сверху с пропуском
отдельных промежуточных уровней, а, во-вторых, отдельные реакции организма на внешние
и внутренние возмущения реализуются без участия верхнего уровня определенным
промежуточным уровнем в соответствии с его специализацией. Таким образом, все уровни
управления в действительности работают как последовательно, так и параллельно, дополняя
и резервируя друг друга.
Важными
особенностями
материальной
реализации
рассмотренной
системы
являются ее многоканальность и избыточность. Получение информации, ее обработка,
запоминание и преобразование в мышечные усилия осуществляются по тысячам и
миллионам параллельно действующих каналов из послойно построенных ансамблей
нейронов. Эта информация носит вероятностный характер, как и состав обрабатывающих ее
ансамблей нейронов, который сам определяется этой информацией. (При этом, от слоя к
слою каждый вид информации - зрительная, акустическая, температурная и т. п. -передается
тактированно с распределением ее по слою, в соответствии пространственным размещением
отображаемых ею объектов в реальной среде.) Такой принцип параллельной обработки
сигналов обеспечивает системе в целом необходимые быстродействие и надежность,
недостижимые пока в технических системах.
19
Тема 15. Концепция проектирования мехатронных модулей и систем
Системный
подход
к
проектированию
на
базе
систем
автоматизированного проектирования с использованием CALS-технологий
(объектно-ориентированное проектирование) Внедрение CALS - сложный,
многогранный процесс, связанный с различными аспектами деятельности
организации, нормативное обоснование, подготовка кадров, применение
результатов НИОКР и пилотных проектов, направленных на изучение и
разработку решений в области CALS-технологий, информационные источники
о существующих решениях и ведущихся работах в области CALS. Создание
единого информационного пространства для внедрения CALS-технологий.
Проблемы практического использования CALS-технологий.
История гибкой автоматизации началась в 1955 г. с появления станков с ЧПУ. Именно
такого
типа
автоматическое
технологическое
оборудование
с
быстросменяемыми
программами работы является основной для создания гибких, т. е. быстро перестраиваемых
на выпуск новой продукции, производств. Однако для реализации идеи гибкой
автоматизации, необходимо было выполнение ещё ряда условий. Этим и объясняется тот
факт, что первые станки с ЧПУ распространялись очень медленно. За первые 10 лет их доля
в общем парке станков в технически передовых странах не достигла и 0,1 %. Ситуация резко
изменилась в 1970-е гг. С появлением следующего важнейшего компонента гибкой
автоматизации - микропроцессорных систем управления, обеспечивающих резкое снижение
стоимости систем ЧПУ и повышение их надежности.
Технологические машины с параллельной кинематикой
Мехатронный подход положен в основу машин с концептуально новым принципом
построения – так называемых гексаподов. Эти технологические машины (станки,
координатно-измерительные машины, роботы) имеют стержневую конструкцию и
построены на мехатронных модулях линейного движения (СЛАЙД 14), в основе их
конструктивной схемы лежит платформа Стюарта [1].
У механизмов с параллельной кинематикой (МПК) выходная часть в виде подвижной
платформы обычно перемещается несколькими соединениями («штангами»), действующими
в параллели. Шесть линейных соединений типа шарико-винтовых передач (ШВП) или
20
гидроцилиндров дают до шести степеней свободы относительно ядра - по трем осям и трем
углам отдельно или в любых комбинациях. Этот вариант и был назван «гексаподом».
Технические решения мехатронных технологических систем на базе механизмов
параллельной кинематики обеспечивают существенные преимущества по сравнению со
станками традиционной компоновки, в первую очередь, по технологическим возможностям
обработки изделий сложной конфигурации и точности исполнительных движений.
Наиболее
перспективной
областью
их
применения
является
прецизионное
станкостроение. Результаты структурного анализа систем параллельной кинематики могут
быть использованы при проектировании нового типа автоматизированных технологических
систем.
Основными преимуществами гексаподных машин являются:
− сокращение
времени
подготовки
производства
и
повышение
его
рентабельности за счет объединения обрабатывающих, разметочных и
измерительных функций в единой мехатронной системе;
− высокая
точность
измерений
и
обработки,
которая
обеспечивается
повышенной жесткостью стержневых механизмов (до 5 раз), применением
прецизионных датчиков обратной связи и лазерных измерительных систем,
− использованием компьютерных методов коррекции (например, тепловых
воздействий);
− повышенная скорость движений (скорость быстрых перемещений достигает 10
м/с, рабочих движений - до 2,5 м/с);
− отсутствие направляющих (в качестве несущих элементов конструкции
используются приводные механизмы), отсюда улучшенные малогабаритные
характеристики и материалоемкость;
− высокая
степень
унификации
мехатронных
узлов,
обеспечивающая
технологичность изготовления и сборки машины и конструктивную гибкость;
− «высокое качество управления движением благодаря малой инерционности
механизмов, применению линейных мехатронных модулей движения как
объектов
управления,
использованию
методов
автоматизированной
подготовки и исполнения в реальном времени управляющих программ.
Механизмы с параллельной кинематикой (МПК) не обязательно должны иметь шесть
штанг. Их может быть и три, и восемь. Важно, что пространственные движения платформе
передают путем изменения длин штанг. В отличие от традиционных последовательных
многокоординатных систем, в которых погрешности позиционирования по каждой из осей
21
суммируются, погрешности МПК могут взаимно компенсироваться, так что общая
неточность может достигать доли микрона.
Другой пример из области металлургии: следует отметить, что большинство
металлургических процессов являются многомерными, нелинейными и изменяющимися во
времени. Все эти обстоятельства не позволяют производить процессы оптимально без
участия оператора.
В этих условиях существенно повысить эффективность работы автоматической
системы регулирования может интеллектуализация процессов управления, а конкретно применение нечеткой логики. Одним из основных преимуществ нечеткого алгоритма
управления является то, что он может разрабатываться по лингвистическим правилам, что
тесно связано с искусственным интеллектом. Нечеткий контроллер состоит из набора
условных
лингвистических
операторов
или
правил
(называемых
«нечеткими
ассоциативными матричными» или НАМ-правилами), задающих конкретные операции
управления.
Эти условные лингвистические операторы могут быть получены из соображений
здравого смысла или технических сведений о процессе, которым требуется управлять. Кроме
того, нечеткие контроллеры могут работать с не полностью описанными системами с
неизвестной динамикой, так как для них (в отличие от многих традиционных ПИД-,
адаптивных и самонастраивающихся контроллеров) не требуется априорная математическая
модель управления.
Для примера, блок-схема нечеткого контроллера для управления температурой
обжиговой машины представлена на Слайде 15.
Основным элементом системы нечеткого управления является блок, содержащий
НАМ-правила, которым задают конкретные ситуации управления. Опыт построения систем
на основе нечеткой логики говорит о том, что во многих практических приложениях
достаточно установить связь между ошибкой и изменением ошибки процесса, чтобы
осуществлять такое изменение управляющего входного сигнала, которое обеспечит
удовлетворительное управление системой.
В системе используются три переменные: е(І) - ошибка, представляющая собой
рассогласование между желаемой и фактической температурами; c(t) -скорость изменения
ошибки, представляющая собой первую производную ошибки по времени; U(t) выход или
управляющая нечеткая переменная, представляющая собой нормирование напряжения от 0
до 5 В, подаваемое на управляющий вход исполнительных механизмов горелок.
22
Три четкие переменные фаззифицируются в виде семи нечетких подмножеств из
кортежа термов L = {NB, NM, NS, ZE, PS, РМ, РВ}, где NB - самое малое лингвистическое
отрицательное значение, РВ самое большое положительное значение.
Матрица нечетких ассоциаций (правил) для системы управления обжиговой машины
была разработана на основе общеинженерных рассуждений и опыта технологического
персонала. Всего было сформулировано 30 правил. Число правил не критично, важно, чтобы
они отразили достаточное количество основных зависимостей. В качестве примера
интерпретация одного из правил на языке технолога это выглядит так: «Если
рассогласование (ошибка) температуры обжига положительное и большое, а скорость
изменения ошибки мала, то температуру печи нужно увеличить максимально».
На слайде внизу представлена архитектура нечеткого преобразователя, который
осуществляет преобразование четкость-нечеткость-четкость.
Далее выбираются функций принадлежности для решаемой задачи, которые
обеспечат упрощение вычислений. Функция принадлежности нечеткого множества ставит в
соответствие каждому элементу из универсального множества некоторое вещественное
число (обычно от 0 до 1); это число обозначает степень, с которой конкретный объект или
элемент данных принадлежит нечеткому множеству.
Не углубляясь во внутренние процессы и математику блоков фазификации и
дефазификации на выходе схемы система нечеткого вывода способна выдать оцифрованное
и адекватное воздействие на блок горелок, для управления процессом обжига.
Еще один пример из области металлургии: технологический процесс производства
крупногабаритных изделий сложной конфигурации характеризуется многофакторностью,
наличием на входе и выходе неподдающихся контролю параметров, нестационарностью,
сложными зависимостями между параметрами и значительным запаздыванием по основным
каналам управления. В то же время разработка технологий и систем управления процессами
базируется на физически плохо обусловленных решениях краевых сопряженных задач
термоупругопластичности. Поэтому исследование течения металла, а также определение
напряженно-деформированного состояния и температурных полей в процессе пластического
деформирования изделий сложной конфигурации сопряжены с большими, часто
принципиально непреодолимыми вычислительными трудностями. Определенные успехи
достигаются за счет разбиения тел сложной конфигурации на ряд тел простой формы (при
использовании прямых вариационных методов), с помощью структурного метода (метода Rфункций), за счет применения метода комфортных отображений и использования
современных численных (дискретных) методов (например, метода конечных элементов).
23
Для решения задач, связанных с большими пластическими деформациями в процессах
обработки металлов давлением, среди которых в первую очередь стоит отметить DEFORM
(Design Environment for FORMing). Однако, принципиально важен тот факт, что все
детерминированные математические модели физически недостаточно хорошо обусловлены
в связи с отсутствием точных знаний граничных условий (например, сил трения на
контактных поверхностях), механических и теплофизических свойств деформируемого
материала.
Всё
вышесказанное
диктует
необходимость
привлечения
неформальных
(эвристических) методов решения поставленных задач и создания экспертных систем (ЭС),
предназначенных для проектирования технологических процессов производства изделий
сложной конфигурации из легких и специальных сплавов.
Интеллектуализация задач обработки металлов давлением идет по двум основным
направлениям: разработка ЭС проектирования технологических процессов пластического
деформирования изделий сложной конфигурации и создание интеллектуальных систем
управления технологическими машинами и комплексами.
Экспертная система предназначена для проектирования технологических процессов
обработки металлов давлением, в первую очередь процессов штамповки и прессования
изделий сложной конфигурации из алюминиевых, титановых и специальных сплавов, а
также для решения следующих задач:
− проектирования инструмента, обеспечивающего равномерное течение металла
в процессе пластического деформирования материала;
− определение скоростных режимов деформирования (включая изотермическое
деформирование) и т.д.
Для реализации поставленных задач ЭС содержит:
− классификатор конфигурации изделий и полный словарь признаков классов
изделий;
− базу знаний (БЗ), включающую декларативные знания о действующих
технологических
процессах
и
процедурные
знания,
позволяющие
моделировать технологические процессы;
− алгоритм получения выводов и заключений;
− систему накопления знаний и систему объяснений, отвечающую на вопросы о
том, на основе каких данных сделан тот или иной вывод.
Алгоритмы получения выводов и заключений могут быть построены в виде системы
продукционных правил.
24
На Слайде 16 представлена принципиальная блок-схема системы управления
нагревом штампового набора. Объектом управления является штамповый набор,
воздействие на который
осуществляется
со
стороны
автономных
электрических
нагревателей изотермического блока. Заданная мощность работы каждого из них достигается
при помощи соответствующего регулятора питания нагревателя. Состояние штампового
набора
(ШН)
измеряется
соответствующими
термопарами
штампового
набора,
установленными внутри его объема, в том числе вблизи гравюры штампа, а также
термопарами нагревателей, измеряющими температуру в зонах наибольшего нагрева для
каждого из нагревателей.
Система также содержит блоки: памяти, вычисления управляемой составляющей
температуры
(УСТ),
оценки
неуправляемой
составляющей
температуры
(НСТ),
прогнозирования температуры, оценки рассогласования температур, определения уставок
для регуляторов питания нагревателей (РПН) и корректировки управляющих воздействий.
Блок памяти хранит информацию о векторах управляющих воздействий в
предшествующие моменты времени – ữj(k), а также – коэффициенты влияния aijk, если нужно
– вычисляет их. Блок вычисления УСТ, получая необходимую информацию от блока памяти,
вычисляет Ѳui .
25
Для построения БЗ перспективны методы нейроинформатики. БЗ, сосредоточенная в
обученных нейронных сетях, отличается большой гибкостью при изменении и дополнении
новыми знаниями. Использование нейросетей – универсальный подход к решению
неформальных задач, основанных на экспертных оценках. Получение структурнопрозрачных сетей в БЗ позволяет обосновывать полученные решения.
Основные преимущества нейросетевых ЭС перед обычными:
− нейросети принимают решения на основе опыта, приобретенного ими
самостоятельно в процессе обучения;
− решение, принимаемое нейросетью, не является категоричным, а выражает
определенную степень уверенности;
− нейросеть дает возможность в процессе моделирования ситуации посмотреть,
«а что будет, если...»;
− нейросети удобно использовать в различных динамических системах, так как
они дают ответ очень быстро;
− возможности нейросетей позволяют упрощать процесс создания ЭС.
Основная трудность создания нейросетей состоит в правильной методике их
обучения.
В основе функционирования ЭС лежит архитектура «клиент-сервер». Серверное
программное обеспечение состоит из двух основных модулей – модуля «Базы данных» и
модуля «Система принятия решений», а также вспомогательного модуля «Модуль начальной
загрузки и конфигурации». Модуль «База данных» реализуется на базе программного
обеспечения промышленного менеджера баз данных (SQL-сервера). Принципиально
возможно использование любого SQL-сервера, обеспечивающего стандартный интерфейс
(ODBC, JDBC, ...).
Модуль «Система принятия решений» строится на базе программного обеспечения
для разработки экспертных систем.
Основой математического обеспечения модуля «Система принятия решений»
является БЗ, сформированная по результатам опросов экспертов и математического
моделирования. В качестве протокола транспортного уровня используется широко
распространенный протокол TCP/IP, реализованный на многих современных платформах,
что обеспечивает построение ЭС на основе гетерогенной сетевой структуры.
«Модуль начальной загрузки и конфигурации» организован на основе HTTP-сервера.
Основным
назначением
данного
модуля
является
централизованное
хранение
конфигурационной информации и программного обеспечения клиентской части и системы.
26
Также «Модуль начальной загрузки и конфигурации» используется для предоставления
клиентам справочной информации о системе в целом.
В качестве программного обеспечения клиентской части системы может выступать
любой программный продукт – www-браузер, совместимый с форматом представления
документов HTML 3.0 и поддерживающий интерпретацию Java-апплетов
Таким образом, программная реализация ЭС является многопользовательской
распределенной компьютерной системой. Данный подход и возможность использования
стандартного
программного
обеспечения
позволяют
использовать
имеющиеся
вычислительные ресурсы наиболее рациональным образом. Кроме того, существенно
облегчается процесс ввода системы в эксплуатацию - система, по сути, превращается в
дополнительный
вид
услуг,
доступных
пользователям
информационной
системы
предприятия.
Мехатронное станочное оборудование с ЧПУ
Станочное оборудование с системой ЧПУ (числовое программное управление) в
настоящее время широко применяется в промышленности.
На рынке ЧПУ существует пять вариантов архитектурного решения систем ЧПУ:
1.
Классическая
система
компьютерного
числового
программированного
управления CNC (computer numerical control).
2.
Система управления с дополнительным персональным компьютером в
качестве терминала PCNC (для визуализации данных и сообщений).
3.
Двухкомпьютерная система PCNC.
4.
Системы
PCNC,
ядро
которых
реализовано
на
отдельной
плате,
устанавливаемой в корпусе промышленного терминального персонального компьютера
5.
Однокомпьютерный вариант PCNC.
Архитектура системы ЧПУ типа CNC строится из ЧПУ-процессора, процессора
программируемого контроллера автоматики и графического процессора. Система может
быть оснащена пассивным терминалом или промышленным компьютером с операционной
системой. В системе CNC используются традиционные аналоговые или автономные
цифровые следящие приводы, подключенные к оптоволоконной сети. Вычислительная
мощность систем исключительно высока, и этим определяется широкий набор их
функциональных возможностей.
Система ЧПУ класса PCNC: специализированный промышленный компьютер с
операционной системой (Windows NT) и возможностью разрабатывать пользовательские
приложения на Visual Basic; PCI - одноплатный ЧПУ-компьютер, выполняющий функции
27
ядра,
включая
программно-реализованный
контроллер
электроавтоматики.
Программирование и редактирование контроллера осуществляется через общий для всей
сети терминал. Программируемый контроллер имеет собственную сеть (и сетевую плату).
Двухкомпьютерная система ЧПУ класса PCNC-2 представляет собой набор модулей:
терминальный компьютер, ЧПУ-компьютер, панель оператора и монитор, удаленные входывыходы программируемого контроллера, одной или несколько групп цифровых приводов
подачи и главного привода. В состав терминального компьютера входят: материнская плата
и интегрированными контроллерами SCSI, VGA, TFT, IDE; многофункциональная
интерфейсная плата MFA с памятью CMOS-ROM. Все платы установлены на пассивной ISAшине; причем предусмотрена установка дополнительных (по заказу) резервных плат:
внутреннего модема, сетевой платы и т.д.
Система ЧПУ класса PCNC-А - пример чисто однокомпьютерной архитектуры PCNC,
в рамках которой все задачи управления (геометрическая, логическая, терминальная)
решены чисто программным путем, без какой-либо дополнительной аппаратной поддержки.
Внешний интерфейс выстроен на базе любой стандартной (по выбору) периферийной шины
Fieldbus, которая представляет собой кольцевой канал для передачи сигналов управления
автономными следящими приводами, а также и для передачи сигналов электроавтоматики.
Выход к объектам осуществляется с помощью периферийных «терминалов» ввода-вывода
В спектре архитектурных решений наиболее уверенные позиции занимает концепция
PCNC; при этом по мере роста вычислительной мощности процессоров все чаще
предпочтение отдают однокомпьютерному варианту. В качестве операционной системы
стандартом
де-факто
стала
Windows
NT
с
расширением
реального
времени.
Программируемые контроллеры реализуют программным путем в рамках единой
вычислительной среды для ядра ЧПУ, а терминал системы ЧПУ используют для
программирования электроавтоматики. Периферия систем ЧПУ становится сетевой, причем
все чаще единая сеть используется как для приводов подачи, так и для системы управления
электроавтоматикой. Наиболее значительная тенденция состоит в развитии идей открытой
архитектуры, предоставляющей конечному пользователю широкие возможности для
реализации собственных функций.
Роботы и робототехнические системы
Современная робототехника представляет собой обширную область прикладного
применения интеллектуальных технологий и средств управления.
Опыт промышленной эксплуатации манипуляционных и транспортных роботов на
практике доказал высокую эффективность их использования для автоматизации различных
28
технологических процессов. Роботы нашли широкое применение в автомобильной и
электронной промышленности, в машино- и приборостроении, а также в других отраслях
производства при выполнении сборочных, покрасочных, сварочных, транспортных и прочих
операции. Однако развитие робототехники охватывает не только промышленные сферы, но
и те прикладные области, общая специфика которых характеризуется экстремальными
условиями проведения необходимых работ.
Одни из первых непромышленных приложений робототехнических систем
исторически были связаны с обслуживанием радиоактивных установок, с организацией
космических и глубоководных исследований, а также в области медицины и биологии.
Промышленные робототехнические системы и комплексы
Термины «Робототехнические системы» (РТС) и «Робототехнические комплексы»
(РТК) означают технические системы и комплексы любого назначения, в которых основные
функции выполняют роботы.
Различаются РТС и РТК основными технологическими операциями такими, как:
сборочные, сварочные, для нанесения покрытий и др. Вспомогательными технологическими
операциями: механообработка, кузнечно-штамповочное производство, литье под давлением,
прессование пластмасс и др.
В качестве примера РТК основных технологических операций рассмотрим сборочные
робототехнические комплексы.
Сборочные робототехнические комплексы
Этот тип робототехнических комплексов по своему значению является наиболее
важным. Сборочные операции в машиностроении составляют до 40% себестоимости
изделий, а в приборостроении еще больше – до 50-60%. Вместе с этим степень автоматизации
сборочных работ сегодня весьма низка в связи с ограниченными возможностями, которые
имеют здесь традиционные средства автоматизации в виде специальных сборочных
автоматов. Такие автоматы применимы главным образом в массовом производстве, в то
время как, например, в машиностроении до 80% продукции относится к серийному и
мелкосерийному производству. Поэтому создание гибких сборочных комплексов на базе ПР
является одним из основных направлений в автоматизации сборочных операций.
К сборочным операциям относятся механическая сборка, электрический монтаж,
микроэлектронная сборка. Процесс сборки состоит из следующих последовательных
взаимосвязанных операций:
− загрузка собираемых деталей в загрузочные и транспортные устройства
(обычно с их ориентацией);
29
− перемещение деталей к месту сборки;
− базирование, т. е. фиксация в строго определенной позиции, с ориентацией
деталей на сборочной позиции;
− собственно операция сборки, т. е. сопряжения деталей, включая закрепление;
− контрольно-измерительные операции в ходе сборки;
− удаление собранного узла со сборочной позиции для перемещения его на
следующую позицию, если сборка не закончена.
На Слайде 18 представлена схема линии сборки трансформаторов с помощью ПР с
элементами очувствления и адаптивным управлением. На несущей раме смонтировано
сборочное оборудование - 3 ПР, питатели собираемых деталей и сборочная оснастка. В
линию входят также установка формовки и сушки трансформаторов и ряд других элементов.
Устройство управления линии осуществляет групповое управление всеми ПР и
технологическим оборудованием по заданной программе. Кроме того, в него включен узел
адаптации, состоящий из тактильного сенсора и системы контроля тока холостого хода
трансформатора. Набор вспомогательных программ позволяет контролировать качество
сборки трансформаторов и принимать решение о дальнейшем порядке работы в зависимости
от полученной информации.
Роботы реагируют на нестандартные ситуации, которые могут складываться во время
работы:
-
невыполнение одного из условий собираемости узла;
-
несоответствие магнитных и электрических параметров заданным. Линия
работает по принципу последовательной сборки. При поступлении нижней пары магнитных
сердечников с питателя на исходную позицию сборки подается команда на ПР, который
берет катушку из питателя и устанавливает ее на пару сердечников. Другой ПР берет с
исходной позиции питателя 2 верхних магнитных сердечника, последовательно опускает их
в обезжиривающий и клеевой растворы, а затем соединяет с катушкой и 2 нижними
сердечниками. Третий ПР удаляет собранный трансформатор с позиции сборки и с
разворотом подает его в установку формовки и сушки карусельного типа. В установке
трансформаторы обжимаются и подогреваются для склейки торцов сердечников.
В процессе сборки трансформаторов контролируются:
-
поступление деталей на исходные позиции (с помощью оптических датчиков);
-
собираемость деталей и узлов (с помощью датчиков положения);
-
электрические параметры магнитопровода (с помощью датчиков тока).
30
После окончания формовки и сушки трансформатора осуществляется выходной
контроль его электрических параметров. В случае невыполнения одного из контролируемых
условий детали или узлы сбрасываются в браковочную тару.
Автомобильный транспорт
Из наземных видов транспорта автомобильный транспорт является самым
компьютеризированным (за исключением транспортных роботов). Уже сейчас до 40 %
стоимости
легкового
автомобиля
определяется
электронными
компонентами
и
программным обеспечением, а 90 % всех нововведений в автомобиле связаны именно с
электронными системами. В современных легковых автомобилях премиум класса
насчитывается до 70 процессоров, а при создании электронных систем нового автомобиля от
50 % до 70 % расходов приходится на программное обеспечение. По существу, современный
автомобиль – это тот же компьютер, только на колесах.
Жизненно важные функции управления автомобилем – управление двигателем,
тормозами,
рулевым
управлением,
системами
безопасности
–
обслуживают
специализированные отказоустойчивые операционные системы реального времени.
Тенденции компьютеризации автомобильного транспорта в полной мере относятся и
к грузовым автомобилям, а также к транспортным средствам на их базе
Основы проектирования мехатронных устройств и систем
Проектирование мехатронных систем и устройств базируется на использовании
информационных технологий, в частности, технологии автоматизации проектирования.
Проблему повышения конкурентоспособности наукоемких изделий (к числу которых
относятся мехатронные системы и устройства) можно решить за счет сокращения временных
и материальных издержек производства и повышения эффективности процессов жизненного
цикла (ЖЦ) изделий, а также использования современных компьютерных систем на всех
этапах ЖЦ изделий.
В связи с усложнением изделий резко увеличивается объем данных об изделии, и
старые методы работы по его проектированию, производству и эксплуатации уже не в
состоянии обеспечить их точность, целостность и актуальность. При большом количестве
участников проекта и производства дополнительно возникают серьезные проблемы,
связанные с обменом данными между участниками, выражающиеся в наличии
коммуникационных барьеров.
31
Тема 15. Концепция проектирования мехатронных модулей и систем
Системный
подход
к
проектированию
на
базе
систем
автоматизированного проектирования с использованием CALS-технологий
(объектно-ориентированное проектирование) Внедрение CALS - сложный,
многогранный процесс, связанный с различными аспектами деятельности
организации, нормативное обоснование, подготовка кадров, применение
результатов НИОКР и пилотных проектов, направленных на изучение и
разработку решений в области CALS-технологий, информационные источники
о существующих решениях и ведущихся работах в области CALS. Создание
единого информационного пространства для внедрения CALS-технологий.
Проблемы практического использования CALS-технологий.
Системный подход к проектированию
Основной общий принцип системного подхода заключается в рассмотрении частей
явления или сложной системы с учетом их взаимодействия. Системный подход включает в
себя выявление структуры системы, типизацию связей, определение атрибутов (свойств),
анализ влияния внешней среды.
Системный подход является базой для обобщающей дисциплины «Теория систем»
(или «Системный анализ»). При проектировании сложных систем цели достигаются в
многошаговых процессах принятия решений. Методы принятия решений часто выделяются
в самостоятельную дисциплину, называемую «Теория принятия решений».
В технике дисциплину (СЛАЙД 20), в которой исследуются сложные технические
системы и их проектирование, чаще называют системотехникой (вместо «Теория систем»).
Предметом системотехники являются, во-первых, организация процесса создания,
использования и развития технических систем, во-вторых, методы их проектирования и
исследования. В системотехнике важно уметь сформулировать цели системы и организовать
ее рассмотрение с позиций поставленных целей. Тогда можно отбросить лишние и
малозначимые части при проектировании и моделировании, перейти к постановке
оптимизационных задач.
Интерпретация и конкретизация системного подхода имеют место в ряде известных
подходов с другими названиями, которые также можно рассматривать как компоненты
32
системотехники. Таковы структурный, блочно-иерархический, объектно-ориентированный
подходы. (СЛАЙД 21)
При структурном подходе, как разновидности системного, требуется синтезировать
варианты системы из компонентов (блоков) и оценивать варианты при их частичном
переборе с предварительным прогнозированием характеристик компонентов.
Блочно-иерархический подход к проектированию использует идеи декомпозиции
сложных описаний объектов и, соответственно, средств их создания на иерархические
уровни и аспекты, вводит понятие стиля проектирования (восходящее и нисходящее),
устанавливает связь между параметрами соседних иерархических уровней.
Ряд важных структурных принципов, используемых при разработке информационных
систем и, прежде всего, их программного обеспечения (ПО), выражен в объектноориентированном
подходе
к
проектированию.
Такой
подход
имеет
следующие
преимущества в решении проблем управления сложностью и интеграции ПО:
− вносит в модели приложений большую структурную определенность,
распределяя представленные в приложении данные и процедуры между
классами объектов;
− сокращает объем спецификаций благодаря введению в описания иерархии
объектов и отношений наследования между свойствами объектов разных
уровней иерархии;
− уменьшает вероятность искажения данных вследствие ошибочных действий за
счет ограничения доступа к определенным категориям данных в объектах.
Описание в каждом классе объектов допустимых обращений к ним и принятых
форматов сообщений облегчает согласования и интеграцию ПО.
Для всех подходов к проектированию сложных систем характерны также следующие
особенности.
− Структуризация процесса проектирования, выражаемая декомпозицией
проектных задач и документации, выделением стадий, этапов, проектных
процедур. Эта структуризация является сущностью блочно-иерархического
подхода к проектированию.
− Итерационный (пошаговый) характер проектирования.
− Типизация и унификация проектных решений и средств проектирования.
В системотехнике введен ряд терминов, среди них к базовым нужно отнести
следующие понятия. (СЛАЙД 22)
Система - множество элементов, находящихся в отношениях и связях между собой.
33
Элемент - такая часть системы, представление о которой нецелесообразно
подвергать при проектировании дальнейшему членению.
Сложная система - система, характеризуемая большим числом элементов и, что
наиболее важно, большим числом взаимосвязей элементов.
Сложность системы определяется также видом взаимосвязей элементов, свойствами
целенаправленности,
целостности,
членимости,
иерархичности,
многоаспектности.
Очевидно, что современные автоматизированные информационные системы и, в частности,
САПР являются сложными в силу наличия у них перечисленных свойств и признаков.
Подсистема - часть системы (подмножество элементов и их взаимосвязей), которая
имеет свойства системы.
Надсистема - система, по отношению к которой рассматриваемая система является
подсистемой.
Структура - (СЛАЙД 23) отображение совокупности элементов системы и их
взаимосвязей; понятие структуры отличается от понятия системы также тем, что при
описании структуры принимаются во внимание лишь типы элементов и связей без
конкретизации значений их параметров.
Параметр - величина, выражающая свойство или системы, или ее части, или
влияющей на систему среды. Обычно в моделях систем в качестве параметров
рассматривают величины, не изменяющиеся в процессе исследования системы. Параметры
подразделяют на внешние, внутренние и выходные, выражающие свойства элементов
системы, самой системы, внешней среды соответственно.
Фазовая
переменная
-
величина,
характеризующая
энергетическое
или
информационное наполнение элемента или подсистемы.
Состояние - совокупность значений фазовых переменных, зафиксированных в одной
временной точке процесса функционирования.
Поведение (динамика) системы - изменение состояния системы в процессе
функционирования.
Система без последействия - ее поведение при t>t0 определяется заданием состояния
в момент t0 и вектором внешних воздействий Q(t). В системах с последействием, кроме того,
нужно знать предысторию поведения, т. е. состояния системы в моменты, предшествующие
t0 .
Вектор переменных V, (СЛАЙД 24) характеризующих состояние (вектор
переменных состояния), - неизбыточное множество фазовых переменных, задание значений
которых в некоторый момент времени полностью определяется поведение системы в
дальнейшем (в автономных системах без последствия).
34
Пространство состояний - множество возможных значений вектора переменных
состояний.
Фазовая траектория - представление процесса (зависимости V(t)) в виде
последовательности точек в пространстве состояний.
К характеристикам сложных систем, как сказано выше, часто относят следующие
понятия.
Целенаправленность - свойство искусственной системы, выражающее назначение
системы. Это свойство необходимо для оценки эффективности вариантов системы.
Целостность - свойство системы, характеризующее взаимосвязанность элементов и
наличие зависимости выходных параметров от параметров элементов, при этом большинство
выходных параметров не является простым повторением или суммой параметров элементов.
Иерархичность - (СЛАЙД 25) свойство сложной системы, выражающее
возможность и целесообразность ее иерархического описания, т. е. представления в виде
нескольких уровней, между компонентами которых имеются отношения целое - часть.
Составными частями системотехники являются следующие основные разделы:
- иерархическая структура систем, организация их проектирования;
- анализ и моделирование систем;
- синтез и оптимизация систем.
Моделирование имеет две четко различимые задачи; 1 - создание моделей сложных
систем (в англоязычном написании modeling)., 2 анализ свойств систем на основе
исследования их моделей (simulation).
Синтез также подразделяют на две задачи: 1 - синтез структуры проектируемых
систем (структурный синтез); 2 - выбор численных значений параметров элементов систем
(параметрический синтез). Эти задачи относятся к области принятия проектных решений.
Моделирование и оптимизацию желательно выполнять с учетом статистической
природы систем. Детерминированность - лишь частный случай. При проектировании
характерны нехватка достоверных исходных данных, неопределенность условий принятия
решений. Учет статистического характера данных при моделировании в значительной мере
основан на методе статистических испытаний (методе Монте-Карло), а принятие решений на использовании нечетких множеств, экспертных систем, эволюционных вычислений.
Пример 1 Компьютер является сложной системой в силу наличия у него большого
числа элементов, разнообразных связей между элементами и подсистемами, свойств
целенаправленности, целостности, иерархичности. К подсистемам компьютера относятся
процессор (процессоры), оперативная память, кэш-память, шины, устройства ввода-вывода.
В качестве надсистемы могут выступать вычислительная сеть, автоматизированная и (или)
35
организационная система, к которым принадлежит компьютер. Внутренние параметры времена выполнения арифметических операций, чтения (записи) в накопителях, пропускная
способность шин и др. Выходные параметры - производительность компьютера, емкость
оперативной и внешней памяти, себестоимость, время наработки на отказ и др. Внешние
параметры -напряжение питания сети и его стабильность, температура окружающей среды и
др.
Пример 2. Для двигателя внутреннего сгорания подсистемами являются коленчатый
вал, механизм газораспределения, поршневая группа, системы смазывания и охлаждения.
Внутренние параметры - число цилиндров, объем камеры сгорания и др. Выходные
параметры - мощность двигателя, КПД, расход топлива и др. Внешние параметры характеристики топлива, температура воздуха, нагрузка на выходном вату.
Пример 3. Подсистемы электронного усилителя - усилительные каскады; внутренние
параметры - сопротивления резисторов, емкости конденсаторов, параметры транзисторов;
выходные параметры - коэффициент усиления на средних частотах, полоса пропускания,
входное сопротивление; внешние параметры - температура окружающей среды, напряжения
источников питания, сопротивление нагрузки.
Структура процесса проектирования
При
использовании
блочно-иерархического
подхода
к
проектированию
представление о проектируемой системе расчленяют па иерархические уровни.
Иерархические уровни проектирования
На
верхнем
уровне
используют
наименее
детализованное
представление,
отражающее только самые общие черты и особенности проектируемой системы. На
следующих уровнях степень подробности описания возрастает, при этом рассматриваются
уже отдельные блоки системы, но с учетом воздействий на каждый из них его соседей. Такой
подход позволяет на каждом иерархическом уровне формулировать задачи приемлемой
сложности, поддающиеся решению с помощью имеющихся средств проектирования.
Разбиение на уровни должно быть таким, чтобы документация на блок любого уровня было
обозрима и воспринимаема одним человеком.
Другими словами, блочно-иерархический подход есть декомпозиционный подход,
который основан на разбиении сложной задачи большой размерности на последовательно и
(или) параллельно решаемые группы задач малой размерности, что существенно сокращает
требования к используемым вычислительным ресурсам или время решения задач.
36
Можно говорить об иерархических уровнях не только спецификаций, но и
проектирования, понимая под каждым из них совокупность спецификаций некоторого
иерархического уровня совместно с постановками задач, методами получения описаний и
решения возникающих проектных задач.
Список иерархических уровней в каждом приложении может быть специфичным, но
для большинства приложений характерно следующее наиболее крупное выделение уровней;
системный уровень, на котором решаются наиболее общие задачи проектирования
систем,
машин
и
процессов;
результаты
проектирования представляют в виде
структурных схем, генеральных планов, схем размещения оборудования, диаграмм потоков
данных и т. п.;
-
макроуровень, на котором проектируют отдельные устройства, узлы машин и
приборов; результаты представляют в виде функциональных, принципиальных и
кинематических схем, сборочных чертежей и т. п.;
- микроуровень, на котором проектируют отдельные детали и элементы машин и
приборов.
В каждом приложении число выделяемых уровней и их наименования могут быть
различными. Так, в радиоэлектронике микроуровень часто называют
макроуровень
схемотехническим.
компонентным,
Между схемотехническим и системным уровнями
вводят уровень, называемый функционально-логическим. В вычислительной технике
системный уровень подразделяют на уровни проектирования ЭВМ (вычислительных систем)
и вычислительных сетей. В машиностроении имеются уровни деталей, узлов, машин,
комплексов.
В зависимости от последовательности решения задач иерархических уровней
различают нисходящее, восходящее и смешанное проектирование (стили проектирования).
Последовательность решения задач от нижних уровней к верхним характеризует восходящее
проектирование, обратная последовательность приводит к нисходящему проектированию,
в смешанном стиле имеются элементы как восходящего, так и нисходящего проектирования.
В большинстве случаев для сложных систем предпочитают нисходящее проектирование.
Отметим, однако, что при наличии заранее спроектированных составных блоков (устройств)
можно говорить о смешанном проектировании.
Неопределенность и нечеткость исходных данных при нисходящем проектировании
(так как еще не спроектированы компоненты) или исходных требований при восходящем
проектировании (поскольку техническое задание имеется на всю систему, а не на ее части)
обусловливают необходимость прогнозирования недостающих данных с последующим их
37
уточнением,
т.
е.
последовательного
приближения
к
окончательному
решению
(итерациониость проектирования).
Наряду с декомпозицией описаний на иерархические уровни применяют разделение
представлений о проектируемых объектах на аспекты.
Аспект описания (страта) - описание системы или ее части с некоторой оговоренной
точки зрения, определяемой функциональными, физическими или иного типа отношениями
между свойствами и элементами.
Различают функциональный, информационный, структурный и поведенческий
(процессный) аспекты. Функциональное описание относят к функциям системы и чаще всего
представляют его функциональными схемами. Информационное описание включает в себя
основные понятия предметной области (сущности), словесное пояснение или числовые
значения характеристик (атрибутов) используемых объектов, а также описание связей между
этими понятиями и характеристиками. Информационные модели можно представлять
графически (графы, диаграммы сущность - отношение), в виде таблиц или списков.
Структурное описание относится к морфологии системы, характеризует составные части
системы и их межсоединения и может быть представлено структурными схемами, а также
различного рода конструкторской документацией. Поведенческое описание характеризует
процессы функционирования (алгоритмы) системы и (или) технологические процессы
создания системы. Иногда аспекты описаний связывают с подсистемами, функционирование
которых основано на различных физических процессах.
Отметим, что в общем случае выделение страт может быть неоднозначным. Так,
помимо указанного подхода очевидна целесообразность выделения таких аспектов, как
функциональное
(разработка
принципов
действия,
структурных,
функциональных,
принципиальных схем), конструкторское (определение форм и пространственного
расположения
компонентов
изделий),
алгоритмическое
(разработка
алгоритмов
и
программного обеспечения) и технологическое (разработка технологических процессов)
проектирование систем. Примерами страт в случае САПР могут служить также
рассматриваемые далее виды обеспечения автоматизированного проектирования.
Стадии проектирования
Стадии проектирования – (СЛАЙД 26) наиболее крупные части проектирования
процесса, развивающегося во времени. В общем случае выделяют стадии научноисследовательских работ (НИР), эскизного проекта или опытно-консфукторских работ,
технического, рабочего проектов, испытаний опытных образцов или опытных партий.
38
Стадию НИР иногда называют предпроектными исследованиями или стадией технического
предложения. Очевидно, что по мере перехода от стадии к стадии степень подробности и
тщательность проработки проекта возрастают, и рабочий проект должен быть вполне
достаточным для изготовления опытных или серийных образцов. Близким к определению
стадии, но менее четко оговоренным понятием является понятие этана проектирования.
Стадии (этапы) проектирования подразделяют на составные части, называемые
проектными процедурами. Примерами проектных процедур могут служить подготовка
деталировочных чертежей, анализ кинематики, моделирование переходного процесса,
оптимизация параметров и другие проектные задачи. В свою очередь, проектные процедуры
можно расчленить на более мелкие компоненты, называемые проектными операциями,
например, при анализе прочности детали сеточными методами операциями могут быть
построение сетки, выбор или расчет внешних воздействий, собственно моделирование полей
напряжений и деформаций, представление результатов моделирования в графической и
текстовой формах. Проектирование сводится к выполнению некоторых последовательностей
проектных процедур - маршрутов проектирования.
Иногда разработку технического задания (ТЗ) на проектирование называют
внешним проектированием, а реализацию ТЗ - внутренним проектированием.
В ТЗ на проектирование объекта указывают, по крайней мере, следующие данные.
1. Назначение объекта.
2. Условия
эксплуатации.
Наряду
с
качественными
характеристиками
(представленными в вербальной форме) имеются числовые параметры,
называемые внешними параметрами, для которых
допустимых
значений.
Примеры
внешних
указаны области
параметров:
температура
окружающей среды, внешние силы, электрические напряжения, нагрузки и т.
п.
3. Требования к выходным параметрам, т. е. к величинам, характеризующим
свойства объекта, интересующие потребителя. Эти требования выражены в
виде условий работоспособности yiRTi , где yi i-й выходной параметр; R∈ {=,
<, >, <=, >=} - вид отношения; Ti норма i-го выходного параметра. В случае R=
(равно) нужно задать требуемую точность выполнения равенства.
Примеры условий работоспособности:
расход топлива на 100 км пробега автомобиля > 8л;
коэффициент усиления усилителя на средних частотах > 300;
быстродействие процессора > 40 Мфлопс.
39
Типовые проектные процедуры (СЛАЙД 27)
Создать проект объекта (изделия или процесса) означает выбрать структуру объекта,
определить значения всех его параметров и представить результаты в установленной форме.
Результаты (проектная документация) могут быть выражены в виде чертежей, схем,
пояснительных записок, программ для программно-управляемого технологического
оборудования и других документов на бумаге или машинных носителях информации.
Разработка (или выбор) Структуры объекта есть проектная процедура, называемая
структурным синтезом, а расчет (или выбор) значений параметров элементов X процедура параметрического синтеза.
Задача структурного синтеза формулируется в системотехнике как задача
принятия решении (ЗПР). Ее суть заключается в определении цели, множества
возможных решений и ограничивающих условий.
Классификацию ЗПР осуществляют по ряду признаков. По числу критериев
различают задачи одно- и многокритериальные. По степени неопределенности различают
ЗПР детерминированные, ЗПР в условиях риска (при наличии в формулировке задачи
случайных параметров), ЗПР в условиях неопределенности, т. е. при неполноте или
недостоверности исходной информации.
Реальные задачи проектирования, как правило, являются многокритериальными.
Одна из основных проблем постановки многокритериальных задач - установление правил
предпочтения
вариантов.
Способы
сведения
многокритериальных
задач
к
однокритсриальным и последующие пути решения изучаются в дисциплинах, посвященных
методам оптимизации и математическому программированию.
Наличие случайных факторов усложняет решение ЗПР. Основные подходы к
решению ЗПР в условиях риска заключаются или в решении «для наихудшего случая», или
в учете в целевой функции математического ожидания и дисперсии выходных параметров.
В первом случае задачу решают как детерминированную при завышенных требованиях к
качеству решения, что является главным недостатком подхода. Во втором случае
достоверность результатов решения намного выше, но возникают трудности с оценкой
целевой функции. Применение метода Монте-Карло в случае алгоритмических моделей
становится единственной альтернативой, и, следовательно, для решения требуются
значительные вычислительные ресурсы.
Существуют две группы ЗПР в условиях неопределенности. Одна из них решается при
наличии противодействия разумного противника. Такие задачи изучаются в теории игр, для
40
задач проектирования в технике они не характерны. Во второй группе противодействие
достижению цели оказывают силы природы. Для их решения полезно использовать теорию
и методы нечетких множеств.
Например, при синтезе структуры автоматизированной системы постановка задачи
должна включать в качестве исходных данных следующие сведения:
- множество выполняемых системой функций (другими словами, множество работ,
каждая из которых может состоять из одной или более операций); возможно, что в этом
множестве имеется частичная упорядоченность работ, которая может быть представлена в
виде ориентированного графа, где вершины соответствуют работам, а дуги - отношениям
порядка;
-
типы допустимых для использования серверов (машин), выполняющих функции
системы;
- множество внешних источников и потребителей информации;
- во многих случаях задается также некоторая исходная структура системы в виде
взаимосвязанной совокупности серверов определенных типов; эта структура может
рассматриваться как обобщенная избыточная или как вариант первого приближения;
- различного рода ограничения, в частности ограничения на затраты материальных
ресурсов и (или) на времена выполнения функций системы.
Задача заключается в синтезе (или коррекции) структуры, определении типов
серверов (программно-аппаратных средств), распределении функций по серверам таким
образом, чтобы достигался экстремум целевой функции при выполнении заданных
ограничений.
Конструирование, разработка технологических процессов, оформление проектной
документации - частные случаи структурного синтеза.
Задачу параметрического синтеза называют параметрической оптимизацией (или
оптимизацией), если ее решают как задачу математического программирования, т. е.
𝑒𝑥𝑡𝑟 𝐹(𝑋), 𝑋 ∈ 𝐷𝑥
где F(X) - целевая функция; X - вектор управляемых (называемых также проектными
или варьируемыми) параметров; Dx = {X | φ(X) < О, ψ(Х) = 0} - допустимая область; φ(X) и
ψ(Х) - функции-ограничения. (СЛАЙД 27)
Пример. Электронный усилитель: управляемые параметры X = (параметры
резисторов, конденсаторов, транзисторов): выходные параметры Y = (fB и fH верхняя и
нижняя граничные частоты полосы пропускания; К- коэффициент усиления на средних
частотах; RBX - входное сопротивление). В качестве целевой функции F(X) можно выбрать
41
параметр fB, а условия работоспособности остальных выходных параметров отнести к
функциям-ограничениям.
Следующая после синтеза группа проектных процедур процедуры анализа. (СЛАЙД
28) Цель анализа - получение информации о характере функционирования и значениях
выходных параметров Y при заданных структуре объекта сведениях о внешних параметрах
Q и параметрах элементов X. Если заданы фиксированные значения параметров X и Q , то
имеет место процедура одновариантного анализа, которая сводится к решению уравнений
математической модели и вычислению вектора выходных параметров Y. Если заданы
статистические сведения о параметрах X, и нужно получить оценки числовых характеристик
распределений выходных параметров (например, оценки математических ожиданий и
дисперсий), то это процедура статистического анализа. Если требуется рассчитать матрицы
абсолютной А и (или) относительной В чувствительности, то имеет место задача анализа
чувствительности.
Элемент Аij матрицы A называют абсолютным коэффициентом чувствительности, он
представляет собой частную производную j-го выходного параметра уj по i-му параметру xi
Другими словами. Аij является элементом вектора градиента j-го выходного параметра. На
практике
удобнее
использовать
безразмерные
относительные
коэффициенты
чувствительности Вij, характеризующие степень влияния измерений параметров элементов
на изменения выходных параметров:
𝐵𝑖𝑗 = А𝑖𝑗 ∗ 𝑥𝑖ном /𝑦𝑗ном
где xiном и yjном номинальные значения параметров хi, и yj соответственно.
В процедурах
многовариантного анализа определяется влияние внешних
параметров, разброса и нестабильности параметров элементов на выходные параметры.
Процедура статистического анализа и анализа чувствительности - характерные примеры
процедур многовариантного анализа.
Этапы жизненного цикла промышленных изделий
Жизненный цикл промышленных изделий включает ряд этапов, начиная от
зарождения идеи нового продукта до утилизации по окончании срока его использования.
Основные этапы жизненного цикла промышленной продукции представлены на (СЛАЙД
29) К ним относятся этапы проектирования, технологической подготовки производства
(ТПП), собственно производства, реализации продукции, эксплуатации и, наконец,
утилизации.
42
На всех этапах жизненного цикла изделий имеются свои целевые установки. При этом
участники жизненного цикла стремятся достичь поставленных целей с максимальной
эффективностью. Па этапах проектирования, ТПП и производства нужно обеспечить
выполнение ТЗ при заданной степени надежности изделия |и минимизации материальных и
временных затрат, что необходимо для достижения успеха в конкурентной борьбе в условиях
рыночной
экономики.
Понятие
эффективности
охватывает
не
только
снижение
себестоимости продукции и сокращение сроков проектирования и производства, но и
обеспечение удобства освоения и снижения затрат на будущую эксплуатацию изделий.
Особую важность требования удобства эксплуатации имеют для сложной техники,
например, в таких отраслях, как авиа- или автомобилестроение.
Достижение поставленных целей на современных предприятиях, выпускающих
сложные промышленные изделия, оказывается невозможным без широкого использования
автоматизированных систем (АС), основанных на применении компьютеров и
предназначенных для создания, переработки и использования всей необходимой
информации о свойствах изделий и сопровождающих процессов. Специфика задач,
решаемых на различных этапах жизненного цикла изделий, обусловливает разнообразие
применяемых АС.
Основные типы АС с их привязкой к тем или иным этапам жизненного цикла изделий
указаны на (СЛАЙДЕ 29):
САЕ - Computer Aided Engineering (автоматизированные расчеты и анализ);
CAD - Computer Aided Design (автоматизированное проектирование);
CAM - Computer Aided Manufacturing (автоматизированная технологическая
подготовка производства);
PDM - Product Data Management (управление проектными данными);
ERP - Enterprise Resource Planning (планирование и управление предприятием);
MRP - 2 Manufacturing (Material) Requirement Planning (планирование производства);
MES - Manufacturing Execution System (производственная исполнительная система);
SCM - Supply Chain Management (управление цепочками поставок);
CRM
- Customer
Relationship Management
(управление
взаимоотношениями
с заказчиками);
SCADA - Supervisory Control and Data Acquisition (диспетчерское управление
производственными процессами);
CNC - Computer Numerical Control (компьютерное числовое управление);
S&SM - Sales and Service Management (управление продажами и обслуживанием);
СРС - Collaborative Product Commerce (совместный электронный бизнес).
43
Современные
CAMP
(или
системы
CAECAD),
обеспечивающие
сквозное
проектирование сложных изделий или, по крайней мере, выполняющие большинство
проектных процедур, имеют многомодульную структуру. Модули различаются своей
ориентацией на те или иные проектные задачи применительно к тем или иным типам
устройств и конструкций. При этом возникают естественные проблемы, связанные с
построением общих баз данных, с выбором протоколов, форматов данных и интерфейсов
разнородных подсистем, с организацией совместного использования модулей при групповой
работе.
Эти проблемы усугубляются на предприятиях, производящих сложные изделия, в
частности, с механическими и радиоэлектронными подсистемами, поскольку САПР
машиностроения и радиоэлектроники до недавнего времени развивались самостоятельно, в
отрыве друг от друга.
Для решения проблем совместного функционирования компонентов САПР
различного назначения разрабатываются системы управления проектными данными
системы PDM. Они либо входят в состав модулей конкретной САПР, либо имеют
самостоятельное значение и могут работать совместно с разными САПР.
Уже на этапе проектирования требуются услуги системы SCM, иногда называемой
системой управления поставками комплектующих (Component Supplier Management),
которая на этапе производства обеспечивает поставки необходимых материалов и
комплектующих.
АСТПП, составляющие основу системы САМ, выполняют синтез технологических
процессов и программ для оборудования с числовым программным управлением (ЧПУ),
выбор технологического оборудования, инструмента, оснастки, расчет норм времени и т. п.
Модули системы САМ обычно входят в состав развитых САПР, и потому интегрированные
САПР часто называют системами САЕ/CAD/CAM/PDM.
Функции
управления
на
промышленных
предприятиях
выполняются
автоматизированными системами на нескольких иерархических уровнях.
Автоматизацию управления на верхних уровнях от корпорации (производственных
объединений предприятий) до цеха осуществляют ЛСУП, классифицируемые как системы
ERP или MRP-2.
Наиболее известные системы ERP выполняют различные бизнес-функции, связанные
с планированием производства, закупками, сбытом продукции, анализом перспектив
маркетинга, управлением финансами, персоналом, складским хозяйством, учетом основных
фондов и т. п. Системы MRP-2 ориентированы главным образом на бизнес-функции,
непосредственно связанные с производством.
44
АСУТП
контролируют
и
используют
данные,
характеризующие
состояние
технологического оборудования и протекание технологических процессов. Именно их чаще
всего называют системами промышленной автоматизации.
Для выполнения диспетчерских функций (сбора и обработки данных о состоянии
оборудования и технологических процессов) и разработки программного обеспечения для
встроенного оборудования в состав АСУТП вводят систему SCADA. Для непосредственного
программного управления технологическим оборудованием используют системы CNC на
базе контроллеров (специализированных компьютеров, называемых промышленными),
встроенных в технологическое оборудование.
На этапе реализации продукции выполняются функции управления отношениями с
заказчиками и покупателями, проводится анализ рыночной ситуации,
перспективы
спроса на
планируемые
к
определяются
выпуску изделия. Эти задачи решаются с
помощью системы CRM. Маркетинговые функции иногда возлагаются на систему S&SM,
которая, кроме того, служит для решения проблем обслуживания.
На этапе эксплуатации применяются специализированные компьютерные системы,
занятые
вопросами
ремонта,
контроля,
диагностики
эксплуатируемых
систем.
Обслуживающий персонал использует интерактивные учебные пособия и технические
руководства, а также средства для дистанционного консультирования при поиске
неисправностей, программы для автоматизированного заказа деталей взамен отказавших.
Следует отмстить, что функции некоторых автоматизированных систем часто
перекрываются. В частности, это относится к системам ERP и MRP-2. Управление
маркетингом может быть поручено как системе ERP, так и системе CRM или S&SM.
На решение оперативных задач управления проектированием, производством и
маркетингом ориентированы системы MES. Они близки по некоторым выполняемым
функциям к системам ERP, PDM, SCM, S&SM и отличаются от них именно оперативностью,
принятием решений в реальном времени, причем, важное значение придается оптимизации
этих решений с учетом текущей информации о состоянии оборудования и процессов.
Перечисленные автоматизированные системы могут работать автономно, и в
настоящее время так обычно и происходит. Однако эффективность автоматизации будет
заметно выше, если данные, генерируемые в одной из систем, будут доступны в других
системах, поскольку принимаемые в них решения станут более обоснованными.
Чтобы
достичь
должного
уровня
взаимодействия
промышленных
автоматизированных систем, требуется создание единого информационного пространства
(ЕИА) не только на отдельных предприятиях, но и, что более важно, в рамках объединения
предприятий.
Единое
информационное
пространство
обеспечивается
благодаря
45
унификации, как формы, так и содержания информации о конкретных изделиях на
различных этапах их жизненного цикла.
Унификация формы достигается использованием стандартных форматов и языков
представления информации в межпрограммных обменах и при документировании, т. е.
применением так называемых CALS (Continuous Acquisition and Lifecycle Support) технологий.
Структура и разновидности САПР
Как и любая сложная система, САПР состоит из подсистем. Различают подсистемы
проектирующие и обслуживающие. (СЛАЙД 30)
Проектирующие подсистемы непосредственно выполняют проектные процедуры.
Примерами проектирующих подсистем могут служить подсистемы геометрического
трехмерного моделирования механических объектов, изготовления конструкторской
документации, схемотехнического анализа, трассировки соединений в печатных платах.
Обслуживающие подсистемы обеспечивают функционирование проектирующих
подсистем, их совокупность часто называют системной средой (или оболочкой) САПР.
Типичными обслуживающими подсистемами являются подсистемы управления проектными
данными, подсистемы разработки и сопровождения программного обеспечения CASE
(Computer
Aided
Software
Engineering),
обучающие
подсистемы
для
освоения
пользователями технологий, реализованных в САПР.
Структурирование САПР по различным аспектам обусловливает появление видов
обеспечения САПР. Принято выделять семь видов обеспечения САПР:
-
техническое (ТО), включающее различные аппаратные средства (ЭВМ,
периферийные
устройства,
сетевое
коммутационное
оборудование,
линии
связи,
измерительные средства);
математическое (МО), объединяющее математические методы, модели и алгоритмы
для выполнения проектирования;
- программное, представляемое компьютерными программами САПР;
- информационное, состоящее из базы данных, СУБД, а также включающее другие
данные, используемые при проектировании; отметим, что вся совокупность используемых
при проектировании данных называется информационным фондом САПР, а база данных
вместе с СУБД носит название банка данных;
- лингвистическое, выражаемое языками общения между проектировщиками и ЭВМ,
языками программирования и языками обмена данными между техническими средствами
САПР;
46
- методическое, включающее различные методики проектирования, иногда к нему
относят также математическое обеспечение;
организационное,
инструкциями
и
представляемое
другими
документами,
штатными
расписаниями,
регламентирующими
должностными
работу
проектного
предприятия.
Классификацию САПР осуществляют по ряду признаков, например, по приложению,
целевому назначению, масштабам (комплексности решаемых задач), характеру базовой
подсистемы - ядра САПР.
По приложениям наиболее представительными и широко используемыми являются
следующие группы САПР.
•
САПР для применения в отраслях общего машиностроения. Их часто называют
машиностроительными САПР или системами MCAD (Mechanical CAD).
• САПР для радиоэлектроники: системы ECAD (Electronic CAD) или EDA (Electtonic
Design Automation).
•
САПР в области архитектуры и строительства.
Кроме того, известно большое число специализированных САПР или выделяемых в
указанных группах, или представляющих самостоятельную ветвь в классификации.
Примерами таких систем являются САПР больших интегральных схем (БИС); САПР
летательных аппаратов; САПР электрических машин и т. п.
По целевому назначению различают САПР, обеспечивающие разные аспекты
(страты) проектирования. Так, в составе MCAD появляются рассмотренные выше
САЕ/CAD/CAM-системы.
По масштабам различают отдельные программно-методические комплексы (ПМК)
САПР, например: комплекс анализа прочности механических изделий в соответствии с
методом конечных элементов (МКЭ) или комплекс анализа электронных схем; системы
ПМК; системы с уникальными архитектурами не только программного (software), но и
технического (hardware) обеспечения.
По характеру базовой подсистемы различают следующие разновидности САПР.
1. САПР на базе подсистемы машинной графики и геометрического моделирования.
Эти САПР ориентированы на приложения, где основной процедурой проектирования
является конструирование, т. е. определение пространственных форм и взаимного
расположения объектов. К этой группе систем относится большинство САПР в области
машиностроения, построенных на базе графических ядер.
47
В настоящее время широко используются унифицированные графические ядра,
применяемые более чем в одной САПР (ядра Parasolid фирмы EDS Unigraphics и ACIS фирмы
Intergraph).
2.
САПР на базе СУБД. Они ориентированы на приложения, в которых при
сравнительно несложных математических расчетах прорабатывается большой объем
данных.
Такие
САПР
преимущественно
встречаются
в
технико-экономических
приложениях, например, при проектировании бизнес-планов, но они имеются также при
проектировании объектов, подобных щитам управления в системах автоматики.
САПР на базе конкретного прикладного пакета. Фактически это автономно
используемые
программно-методические
комплексы,
например,
имитационного
моделирования производственных процессов, расчета прочности по МКЭ, синтеза и анализа
систем автоматического управления и т. п. Часто такие САПР относятся к системам САЕ.
Примерами могут служить программы логического проектирования на базе языка VHDL,
математические пакеты типа MathCAD.
Комплексные (итерированные) САПР, состоящие из совокупности подсистем
предыдущих
видов.
Характерными
примерами
комплексных
САПР
являются
САЕ/CAD/CAM-системы в машиностроении или САПР БИС. Так, САПР БИС включает в
себя СУБД и подсистемы проектирования компонентов, принципиальных, логических и
функциональных схем, топологии кристаллов, тестов для проверки годности изделий. Для
управления столь сложными системами применяются специализированные системные
среды.
Этапы проектирования автоматизированных систем (АС)
(СЛАЙД 31) К проектированию автоматизированных систем непосредственное
отношение имеют два направления деятельности:
1) собственно проектирование АС конкретных предприятий (отраслей) на базе
готовых
программных
и
аппаратных
компонентов
с
помощью
специальных
инструментальных средств разработки;
2)
проектирование упомянутых компонентов АС и инструментальных средств,
ориентированных на многократное применение при разработке многих конкретных
автоматизированных систем.
Сущность первого направления можно охарактеризовать словами «системная
интеграция» (другое близкое понятие носит название «консалтинг»). Разработчик АС должен
быть
специалистом
в
области
системотехники,
хорошо
знать
соответствующие
международные стандарты, состояние и тенденции развития информационных технологий и
48
программных продуктов, владеть инструментальными средствами разработки приложений
(CASE-средствами) и быть готовым к восприятию и анализу автоматизируемых процессов в
сотрудничестве со специалистами-прикладниками.
Второе направление в большей мере относится к области разработки математического
(МО) и программного обеспечения (ПО) для реализации функций АС - моделей, методов,
алгоритмов, программ на базе знания системотехники, методов анализа и синтеза проектных
решений, технологий программирования, операционных систем и т. п. Существует ряд
общеизвестных технологий (методик) проектирования ПО АС, среди которых, прежде всего,
следует назвать компонентно-ориентированную разработку и технологию индустриальной
разработки программных систем.
Верхний
уровень
проектирования
АС
часто
называют
концептуальным
проектированием. Его выполняют в процессе предпроектных исследований, формулировки
технического задания (ТЗ), разработки эскизного проекта и прототипирования.
Для каждого класса АС (САПР, ERP, геоинформационные системы и т. д.) можно
указать фирмы, специализирующиеся на разработке программных (а иногда и программноаппаратных) систем. Многие из них на основе одной из базовых технологий реализуют свой
подход к созданию АС и придерживаются стратегии либо тотального поставщика, либо
открытости и расширения системы приложениями и дополнениями третьих фирм.
Как собственно АС, так и компоненты АС являются сложными системами, и при их
проектировании нужно использовать один из стилей проектирования:
- нисходящее (Top-of-Design); четкая реализация нисходящего проектирования
приводит к спиральной модели разработки ПО, на каждом витке спирали блоки предыдущего
уровня детализируются, используются обратные связи (альтернативой является так
называемая каскадная модель, относящаяся к поочередной реализации частей системы);
- восходящее (Bottom-of-Design)',
- эволюционное (Middle-of-Design).
Чаще всего применяют нисходящий стиль блочно-иерархического проектирования.
Рассмотрим этапы нисходящего проектирования АС.
(СЛАЙД 32) Верхний уровень проектирования АС часто называют концептуальным
проектированием. Концептуальное проектирование выполняют в процессе предпроектных
исследований, формулировки ТЗ, разработки эскизного проекта и прототипирования
(согласно ГОСТ 34.601-90 эти стадии называют формированием требований к АС,
разработкой концепции АС и эскизным проектом).
Предпроектные исследования проводят путем анализа (обследования) деятельности
предприятия (компании, учреждения, офиса), на котором создается или модернизируется
49
АС. При этом нужно получить ответы на вопросы: Что не устраивает в существующей
технологии? Что можно улучшить? Кому это нужно и, следовательно, каков будет эффект?
Перед обследованием формируются и в процессе его проведения уточняются цели
обследования - определение возможностей и ресурсов для повышения эффективности
функционирования
предприятия
на
основе
автоматизации
процессов
управления,
проектирования, документооборота и т. п. Содержание обследования - выявление структуры
предприятия, выполняемых функций, информационных потоков, имеющихся опыта и
средств автоматизации. Обследование проводят системные аналитики (системные
интеграторы) совместно с представителями организации-заказчика.
На основе анализа результатов обследования строят модель, отражающую
деятельность предприятия на данный момент (до реорганизации). Такую модель называют
«As Is» (как есть). Далее разрабатывают исходную концепцию АС. Эта концепция включает
в себя предложения по изменению структуры предприятия, взаимодействию подразделений,
информационным потокам, что выражается в модели «То Be» (как должно быть).
Результаты анализа конкретизируются в ТЗ на создание АС. В ТЗ указывают потоки
входной информации, типы выходных документов и предоставляемых услуг, уровень
защиты информации, требования к производительности (пропускной способности) и т. п. ТЗ
направляют заказчику для обсуждения и окончательного согласования.
Эскизный проект (техническое предложение) представляют в виде проектной
документации, описывающей архитектуру системы, структуру ее подсистем, состав
модулей. Здесь же содержатся предложения по выбору базовых программно-аппаратных
средств, которые должны учитывать прогноз развития предприятия.
В отношении аппаратных средств и особенно ПО такой выбор чаще всего есть выбор
фирмы-поставщика необходимых средств (или, по крайней мере, базового ПО), так как
правильная совместная работа программ разных фирм достигается с большим трудом. В
проекте может быть предложено несколько вариантов выбора. При анализе выясняются
возможности
покрытия автоматизируемых функций имеющимися программными
продуктами и, следовательно, объемы работ по разработке оригинального ПО. Подобный
анализ необходим для предварительной оценки временных и материальных затрат на
автоматизацию. Учет ресурсных ограничений позволяет уточнить достижимые масштабы
автоматизации, подразделить проектирование АС на работы первой, второй очереди и т. д.
После принятия эскизного проекта разрабатывают прототип АС, представляющий
собой
набор
программ,
эмулирующих
работу
готовой
системы.
Благодаря
прототипированию можно не только разработчикам, но и будущим пользователям АС
50
увидеть контуры и особенности системы и, следовательно, заблаговременно внести
коррективы в проект.
Как на этапе предпроектных исследований, так и на последующих этапах
целесообразно придерживаться определенной дисциплины фиксации и представления
получаемых результатов, основанной на той или иной методике формализации
спецификаций. Формализация нужна для однозначного понимания исполнителями и
заказчиком требований, ограничений и принимаемых решений.
При концептуальном проектировании применяют ряд спецификаций, среди которых
центральное место занимают модели преобразования, хранения и передачи информации.
Модели, полученные в процессе обследования предприятия, являются моделями его
функционирования. В процессе разработки АС модели, как правило, претерпевают
существенные изменения (переход от «As Is» к «То Be») и в окончательном виде модель «То
Be» рассматривают в качестве модели проектируемой АС.
Различают функциональные, информационные, поведенческие и структурные
модели. Функциональная модель системы описывает совокупность выполняемых системой
функций. Информационная модель отражает структуры данных - их состав и взаимосвязи.
Поведенческая
модель
описывает
информационные
процессы
(динамику
функционирования), в ней фигурируют такие категории, как состояние системы, событие,
переход из одного состояния в другое, условия перехода, последовательность событий,
осуществляется привязка ко времени. Структурная модель характеризует морфологию
системы (ее построение) - состав подсистем, их взаимосвязи.
Содержанием последующих этапов нисходящего проектирования является уточнение
перечней приобретаемого оборудования и готовых программных продуктов, построение
системной
среды, детальное инфологическое проектирование баз
данных
и их
первоначальное наполнение, разработка собственного оригинального ПО, которая, в свою
очередь, делится на ряд этапов нисходящего проектирования. Эти работы составляют
содержание рабочего проектирования. После этого следуют закупка и инсталляция
программно-аппаратных средств, внедрение и опытная эксплуатация системы.
Особое место в ряду проектных задач занимает разработка проекта корпоративной
вычислительной сети, поскольку техническое обеспечение автоматизированных систем (ТО
АС) имеет сетевую структуру. Если территориально АС располагается в одном здании или в
нескольких близко расположенных зданиях, то корпоративная сеть может быть выполнена в
виде совокупности нескольких локальных подсетей, связанных опорной локальной сетью.
Кроме выбора типов подсетей, связных протоколов и коммутационного оборудования
приходится решать задачи распределения узлов по подсетям, выделения серверов, выбора
51
сетевого ПО, определения способа управления данными в выбранной схеме распределенных
вычислений и т. п.
В случае если АС располагается в удаленных друг от друга пунктах, в частности,
расположенных в разных городах, то решается вопрос об аренде каналов связи для
корпоративной сети, поскольку альтернативный вариант использования выделенного канала
в большинстве случаев оказывается неприемлемым вследствие высокой цены. Естественно,
что при этом, прежде всего, рассматривается возможность использования услуг Internet.
Возникающие при этом проблемы связаны с обеспечением информационной безопасности и
надежности доставки сообщений.
Открытые системы (СЛАЙД 33)
Одной из главных тенденций современной индустрии информатики является создание
открытых систем. Свойство открытости означает, во-первых, переносимость (мобильность)
ПО на различные аппаратные платформы, во-вторых, приспособленность системы к ее
модификациям (модифицируемость или собственно открытость) и комплексированию с
другими системами в целях расширения ее функциональных возможностей и (или) придания
системе новых качеств (интегрируемость).
Переход к открытым информационным системам позволяет существенно ускорить
научно-технический прогресс в результате замены длительной и дорогостоящей разработки
новых систем по полному циклу их компоновкой из ранее спроектированных подсистем или
быстрой модернизацией уже существующих систем (реинжиниринг).
Открытость подразумевает выделение в системе интерфейсной части (входов и
выходов), обеспечивающей сопряжение с другими системами или подсистемами, причем для
комплексирования достаточно располагать сведениями только об интерфейсных частях
сопрягаемых объектов. Если же интерфейсные части выполнены в соответствии с заранее
оговоренными правилами и соглашениями, которых должны придерживаться все создатели
открытых систем определенного приложения, то проблема создания новых сложных систем
существенно упрощается. Из этого следует, что основой создания открытых систем являются
стандартизация и унификация в области информационных технологий.
Значительное развитие концепция открытости получила в области построения
вычислительных сетей, что нашло выражение в эталонной модели взаимосвязи открытых
систем, поддерживаемой рядом международных стандартов. Идеи открытости широко
используются при построении программного, информационного и лингвистического
52
обеспечения АС; в результате повышается степень универсальности программ, и
расширяются возможности их адаптации к конкретным условиям.
Аспекты открытости отражены в стандартизации:
API (Application Program Interface)
с операционным окружением, в том числе системных вызовов и утилит
интерфейсов прикладных программ
операционной системы (ОС), т. е. связей с ОС;
межпрограммного интерфейса, включая языки программирования;
сетевого взаимодействия;
пользовательского
интерфейса,
в том
числе
средств
фафического
взаимодействия пользователя с ЭВМ;
средств защиты информации.
Среди других стандартов, способствующих открытости ПО АС, следует отметить
стандарты графического пользовательского интерфейса, хранения и передачи графических
данных, построения баз данных и файловых систем, сопровождения и управления
конфигурацией программных средств и др.
Важное значение для создания открытых систем имеют унификация и стандартизация
средств межпрограммного интерфейса, или, другими словами, необходимо наличие
профилей АС дня информационного взаимодействия программ, входящих в АС. Профилем
открытой системы называют совокупность стандартов и других нормативных документов,
обеспечивающих выполнение системой заданных функций.
Так, в профилях АС могут фигурировать язык Express стандарта STEP, спецификация
графического пользовательского интерфейса Motif, унифицированный язык SOL обмена
данными между различными СУБД, стандарты сетевого взаимодействия, в профили MCAD
может входить формат IGES и в случае ECAD - формат EDIF и т. п.
53
Совмещенное проектирование
Совмещенное проектирование, иначе называемое параллельным (current design),
имеет целью сокращение временных затрат на проектирование изделий и заключается в
совмещении во времени операций, процедур или этапов, которые в соответствии с
традиционными методиками выполняются последовательно. Примером может служить
частичное совмещение во времени процедур конструкторского проектирования и
технологической подготовки производства, проектирования аппаратных и программных
частей вычислительной системы и т. п. Совмещенное проектирование основано на
информационном взаимодействии многих программ, т. е. на CALS-технологиях.
CALS – технологии (СЛАЙД 34)
В настоящее время CALS (Continuous Acquisition and Life Cycle Support) переводится
как «непрерывное развитие и поддержка ЖЦ». Первая часть термина CALS (Continuous
Acquisition) означает постоянное развитие, которое претерпевает как само изделие в течение
своего ЖЦ, так и процесс взаимодействия между потребителем и поставщиком. Вторая часть
термина CALS (Life Cycle Support) означает оптимизацию затрат на создание и эксплуатацию
изделия на протяжении всего ЖЦ. Это выливается в увеличение затрат на этапах разработки
(и пропорциональное увеличение цены изделия) в целях лучшего учета требований этапов
эксплуатации, ремонта и обслуживания изделия, что приводит к снижению стоимости
использования изделия дня потребителя.
Способ
достижения
желаемых
целей
(повышение
конкурентоспособности
промышленного изделия) заложен в стратегии CALS, предполагающей создание единого
информационного пространства (ЕИП) для всех участников ЖЦ изделия. ЕИП
предполагает представление всей информации об изделии в электронном виде и
организацию совместного использования для всех участников ЖЦ изделия (в соответствии с
правами доступа).
Основными свойствами ЕИП являются:
- информация предоставляется в электронном виде;
- ЕИП охватывает всю информацию, созданную об изделии всеми исполнителями
на любом этапе ЖЦ;
- ЕИП выступает основным источником данных для исполнителей, предоставляя (в
соответствии с правами доступа) нужную информацию в нужное время и в нужном виде;
54
для интеграции информации в ЕИП используются только международные и
-
отраслевые стандарты, поддерживаемые подавляющим большинством производителей
прикладных систем;
для создания ЕИП используются существующие на предприятиях программно-
-
аппаратные средства; необходима адаптация этих систем к работе в рамках ЕИП.
Стратегия CALS предусматривает два этапа при переходе к ЕИП:
-
автоматизацию отдельных процессов (или этапов) ЖЦ изделия и представление
данных на них в электронном виде;
- интеграцию автоматизированных процессов и относящихся к ним данных, уже
представленных в электронном виде, в рамках ЕИП.
CALS-технологии представляют собой набор методов реализации стратегии CALS:
-
технологии реинжиниринга бизнес-процессов - набор методов реструктуризации
бизнес-процессов в целях повышения их эффективности;
- технологии представления данных об изделии в электронном виде -набор методов
для представления в электронном виде данных об изделии, относящихся к отдельным
процессам
ЖЦ
изделия.
Эти
данные
являются
информационными
моделями,
обеспечивающими автоматизацию отдельных процессов ЖЦ изделия. Технологии
представления данных включают также технологии перевода данных из бумажного в
электронный вид (Е-соттеrсе-E-бизнес). Рассматриваемая группа CALS-технологий
состоит из известных методов, реализованных в соответствующих автоматизированных
системах;
-
технологии интеграции данных об изделии в рамках ЕИП - набор методов для
интеграции автоматизированных процессов ЖЦ и относящихся к
ним данных,
представленных в электронном виде, в рамках ЕИП; эти технологии реализуются с помощью
класса автоматизированных систем, называемых системами управления данными об изделии
(проектными данными) (Product Data Management - PDM).
Технология управления данными об изделии (PDM-система)
(СЛАЙД 35) Технология интеграции данных об изделии (PDM-технология)
представляет собой технологию управления всеми данными об изделии и процессами,
создающими и использующими эти данные в течение всего ЖЦ изделия. Управляемые
данные включают как идентификационные данные (например, данные о конфигурации
изделия), так и данные или документы, которые используются для описания изделия или
того, как оно производится. Возможности управления процессами необходимы для
55
поддержки различных процедур, используемых в течение ЖЦ любого изделия (например,
процедуры изменения изделия).
Для реализации технологии PDM существуют специализированные программные
средства, называемые PDM -системами (т. е. системами управления данными об изделии).
Задачи, решаемые PDM-системой:
-
интегрирование в единую систему прикладных программных систем для
проектирования
конструкции
и
технологии
изготовления
изделий
и
управления
производством;
-
контролирование и управление в автоматизированном режиме конфигурацией
изделий;
- обеспечение сбора данных для системы управления качеством в соответствии со
стандартами серии ISO 9000;
- организация электронного архива технической документации.
PDM-система должна интегрировать всю связанную с изделием информацию,
включая
состав
и
структуру изделия,
геометрические
данные,
чертежи,
планы
проектирования и производства, нормативные документы, программы для станков с ЧПУ,
результаты анализа, корреспонденцию, данные о партиях изделия и отдельных экземплярах
изделия и многое другое. Выступая в качестве средства интеграции, соединяющего
множество различных компьютерных систем (путем интеграции поступающих от них
данных), PDM-система управляет данными в рамках всего ЖЦ изделия, обеспечивая
доступность для соответствующего сотрудника нужной ему информации в нужное время в
нужной форме.
Пользователями PDM-систем являются конструкторы, технологи, работники
технического архива, а также сотрудники, работающие в других предметных областях:
продажи, маркетинга, снабжения, финансов, сервиса, эксплуатации и т. п.
Но мнению экспертов, основная выгода от использования PDM-системы сокращение
времени выхода изделия на рынок. Этот эффект достигается, в первую очередь, за счет
повышения эффективности проектирования и освоения производства изделия.
Повышение эффективности, вызванное применением PDM-системы, имеет три
аспекта. Во-первых, PDM-система избавляет конструктора от непроизводительных затрат
времени, связанных с поиском, копированием и архивированием данных, что при работе с
бумажными данными составляет 25-30 % его времени. Во-вторых, PDM-система позволяет
улучшить коммуникации между конструкторами, технологами и другими участниками ЖЦ
изделия за счет применения технологий параллельного проектирования. В-третьих,
значительно сокращается количество изменений изделия и резко сокращается срок внесения
56
изменения в конструкцию и технологию. В-четвертых, PDM-система делает реально
возможным заимствование ранее спроектированных деталей (до 80 %).
Всех производителей PDM-систем можно достаточно четко разделить на три группы.
В первую входят фирмы, пришедшие в PDM-бизнес из области САПР: SDRC (продукт
Metaphase), РТС (продукт Windchill), Unigraphics Solutions (продукт iMAN) и др. вторую
группу фирм составляют независимые разработчики PDM-систем: Eigner+Partner AG
(CADIM/EDB), НИЦ CALS «Прикладная логистика» (продукт PDM STEP Suite). Третья
группа - это фирмы, пришедшие в PDM из области ЕRР-систем: SAP AG и Вааn.
Информационная поддержка этапов жизненного цикла изделий
(CALS-технологии)
Предпосылки появления CALS-технологий (СЛАЙД 36)
CALS-технологии призваны служить средством, интегрирующим промышленные
автоматизированные системы в единую многофункциональную систему. Целью интеграции
автоматизированных
систем
проектирования
и
управления
является
повышение
эффективности создания и использования сложной техники. В чем выражается повышение
эффективности?
Во-первых, улучшается качество изделий за счет более полного учета имеющейся
информации при проектировании и принятии управленческих решений. Так, обоснованность
решений, принимаемых в автоматизированной системе управления предприятием
(АСУП), будет выше, если лицо, принимающее решение, и соответствующие программы
АСУП имеют оперативный доступ не только к базе данных АСУП, но и к базам данных
других автоматизированных систем - системы автоматизированного проектирования
(САПР), автоматизированной системы технологической подготовки производства (АСТПП)
и автоматизированной системы управления технологическими процессами (АСУТП) и,
следовательно, могут оптимизировать планы работ, содержание заявок, распределение
исполнителей, выделение финансов и т. п.
При этом под оперативным доступом необходимо понимать не просто возможность
считывания данных из баз данных, но и легкость их правильной интерпретации, т. е.
согласованность по синтаксису и семантике с протоколами, принятыми в АСУП. То же
относится и к другим системам, например, технологические подсистемы должны с
необходимостью воспринимать и правильно интерпретировать данные, поступающие от
подсистем автоматизированного конструирования. Последнего не так легко добиться, если
57
основное предприятие и организации-смежники работают с разными автоматизированными
системами.
Во-вторых, сокращаются материальные и временные затраты на проектирование и
изготовление изделий. Применение CALS-технологий позволяет существенно сократить
объемы проектных работ, так как описания ранее выполненных удачных разработок
компонентов и устройств, многих составных частей оборудования, машин и систем,
проектировавшихся ранее, хранятся в базах данных сетевых серверов, доступных любому
пользователю CALS-технологий. Доступность опять же обеспечивается согласованностью
форматов, способов, руководств в разных частях общей интегрированной системы. Кроме
того, появляются более широкие возможности для специализации предприятий, вплоть до
создания виртуальных предприятий, что также способствует снижению затрат.
В-третьих, значительно снижаются затраты на эксплуатацию благодаря реализации
функций интегрированной логистической поддержки. Существенно облегчается решение
проблем ремонтопригодности, интеграции продукции в различного рода системы и среды,
адаптации к меняющимся условиям эксплуатации и т. п.
Эти преимущества интеграции данных достигаются применением современных
CALS-технологий.
СALS-технология
промышленного
—
это
производства,
технология
комплексной
комплексность
компьютеризации
обеспечивается
сфер
унификацией
и
стандартизацией спецификаций промышленных изделий на всех этапах их жизненного
цикла.
Основные
спецификации
представлены
проектной,
технологической,
производственной, маркетинговой, эксплуатационной документацией. В CALS-системах
предусмотрены хранение, обработка и передача информации в компьютерных средах,
оперативный доступ к данным в нужное время и в нужном месте.
СALS-технологии зародились в 1980-е гг. в недрах военно-промышленного
комплекса США в связи с планами США в области стратегической оборонной инициативы
(СОИ). Поэтому не удивительно, что среди имеющихся CALS-стандартов фигурирует
большое число стандартов и рекомендаций DoD (Министерства обороны США). Для
реализации планов СОИ требовались совместные усилия многих промышленных компаний
и предприятий в проектировании, производстве и логистической поддержке сложных
изделий, а это означало необходимость унификации представления данных об изделиях.
Было осознано, что для взаимодействия автоматизированных систем разных предприятий
нужна унификация не только формы, но и содержания (семантики) проектной,
технологической, эксплуатационной и другой информации о совместно производимой
58
продукции. Другими словами, требовалось создание единой информационной среды
взаимодействия всех крупнейших фирм американского военно-промышленного комплекса.
Оказалось, что это чрезвычайно сложная проблема, решение которой требует
длительной и многосторонней проработки в масштабах, выходящих за пределы одной
страны. Выяснилось также, что создание единой информационной среды требуется не только
для уникальных программ типа СОИ, но и для производства любых сложных систем, в
первую очередь военной техники, если ее производство основано на взаимодействии многих
предприятий.
В связи с возникшими практическими потребностями рядом комиссий и комитетов в
рамках
международных
информационных
технологий
организаций
были
взаимодействия
начаты
предприятий
работы по созданию
и
выражающих
их
международных стандартов. В настоящее время в ведущих индустриальных странах мира
созданы национальные органы, координирующие работу в области CALS-технологий. В
международном масштабе развитием CALS помимо ISO занимаются и такие организации,
как ICC (International CALS-congress), EIA (Electronics Industry Association), IEEE (Institute of
Electrical and Electronics Engineers) и др. В России в рамках Госстандарта создан технический
комитет № 431 «CALS-технологии».
В 1990-х гг. разработан и к настоящему времени принят ряд серий международных
стандартов, представляющих CALS-технологии, среди которых наиболее значимы
стандарты ISO 10303 STEP (Satndard for Exchange of Product Data). В контрактах,
заключаемых на поставку зарубежным заказчикам военной техники, требования к изделиям
и документации на них, как правило, формулируются с позиций международных CALSстандартов и стандартов DoD.
Развитие CALS-технологий стимулирует образование виртуальных производств, при
которых процесс создания спецификаций с информацией для программно управляемого
технологического оборудования, достаточной для изготовления изделия, может быть
распределен во времени и пространстве между многими организационно автономными
проектными организациями.
Ожидается, что успех на рынках сложной технической продукции будет немыслим
вне CALS-технологий. Так, уже сегодня фирмы, предлагающие военную технику без
электронной документации, выполненной в соответствии с CALS-стандартами, не имеют
никаких шансов на успех в конкурентной борьбе.
Главная задача создания и внедрения CALS-технологий - обеспечение единообразных
описаний и интерпретации данных независимо от места и времени их получения в общей
системе, имеющей масштабы вплоть до глобальных. Структура проектной, технологической
59
и
эксплуатационной
документации,
языки
ее
представления
должны
быть
стандартизованными. Тогда становится реальной успешная работа над общим проектом
разных коллективов, разделенных во времени и пространстве и применяющих разные
системы CAE/CAD/CAM.
Одна и та же конструкторская документация может быть использована многократно
в разных проектах, а одна и та же технологическая документация - адаптирована к разным
производственным условиям, что позволяет существенно сократить и удешевить общий цикл
проектирования и производства. Кроме того, упрощается эксплуатация систем.
CALS-технологии не отвергают существующие автоматизированные системы
проектирования и управления, а являются средством их эффективного взаимодействия.
Поэтому
интеграция
автоматизированных
систем
на современных предприятиях
должна быть основана на CALS-технологиях. Внедрение их требует освоения имеющихся
технологий
и
развития
CALS-стандартов,
моделей,
методов
и
программ
автоматизированного проектирования и управления. Важные проблемы, требующие
решения при создании CALS-систем, - управление сложностью проектов и интеграция
программного обеспечения, включая вопросы декомпозиции проектов, распараллеливания
проектных работ, целостности данных, межпрограммных интерфейсов и др.
Проблематика
CALS
имеет
ряд
аспектов.
По
аналогии
с
аспектами
автоматизированного проектирования целесообразно эти аспекты называть видами
обеспечения
CALS
и
выделять
лингвистическое,
информационное,
программное,
математическое, методическое, техническое и организационное обеспечение CALS.
К лингвистическому обеспечению относятся языки и форматы данных о
промышленных изделиях и процессах, используемые для представления и обмена
информацией па этапах жизненного цикла изделий.
Информационное обеспечение составляют базы данных, в которых имеются сведения
о промышленных изделиях, используемые разными системами в процессе проектирования,
производства,
эксплуатации,
эксплуатации
и
утилизации
продукции.
В
состав
информационного обеспечения входят также серии международных и национальных CALSстандартов и спецификаций.
Программное обеспечение CALS представлено программными комплексами,
предназначенными для поддержки единого информационного пространства этапов
жизненного цикла изделий. Это прежде всего системы управления документами и
документооборотом, управления проектными данными (PDM), взаимодействия предприятий
в совместном электронном бизнесе (СРС), подготовки интерактивных электронных
технических руководств и некоторые другие.
60
Математическое обеспечение CALS включает методы и алгоритмы создания и
использования моделей взаимодействия различных систем в CALS-технологиях. Среди этих
методов в первую очередь следует назвать методы имитационного моделирования сложных
систем, методы планирования процессов и распределения ресурсов.
Методическое обеспечение CALS представлено методиками выполнения таких
процессов,
как
структурирование
моделирование,
параллельное
сложных
(совмещенное)
объектов,
их
объектно-ориентированное
проектирование
и
производство,
функциональное
и
информационное
проектирование,
создание
онтологии
приложений.
К техническому обеспечению CALS относят аппаратные средства получения,
хранения, обработки и визуализации данных при информационном сопровождении изделий.
Взаимодействие частей виртуальных предприятий, систем, поддерживающих разные этапы
жизненного цикла изделий, происходит через линии передачи данных и сетевое
коммутирующее оборудование. Однако используемые технические средства не являются
специфическими для CALS, и потому далее в данном пособии вопросы технического
обеспечения не рассматриваются.
Наконец, организационное обеспечение CALS представлено различного рода
документами, совокупностью соглашений и инструкций, регламентирующих роли и
обязанности участников жизненного цикла промышленных изделий.
За последний год появился целый ряд предприятий, которые активно занимаются
изучением и применением CALS-технологий для решения конкретных производственных
задач повышения качества и конкурентоспособности выпускаемой продукции. К таким
организациям относятся АВПК «Сухой», АНТК им. Туполева, ОАО «Туламашзавод»,
Конструкторское бюро приборостроения (г. Тула), корпорация «Компомаш», корпорация
«Метран» и др. Разработкой конкретных применений CALS-технологий для ряда областей
промышленности занимается МГТУ «Станкин».
STEP-стандарты
Построение
распределенных
АС
для
проектирования
и
управления
в
промышленности, взаимодействующих друг с другом в едином информационном
пространстве, составляет основу современных CALS-технологий. В CALS-технологиях
необходимо обеспечить единообразное описание и интерпретацию данных, независимо от
места и времени их получения в общей системе, имеющей масштабы вплоть до глобальных.
Структура проектной, технологической и эксплуатационной документации, языки ее
представления должны быть стандартизованными. Тогда становится реальной успешная
61
работа над общим проектом разных коллективов, разделенных во времени и пространстве и
использующих разные CAE/CAD/CAM-системы. Одна и та же проектная документация
может быть использована многократно в разных проектах, а одна и та же технологическая
документация - в разных производственных условиях, что существенно сокращает и
удешевляет общий цикл проектирования и производства, а также упрощает эксплуатацию
систем.
Эти цели поставлены при разработке стандартов STEP (Standard for Exchange of
Product Data - стандарт для обмена данными о промышленной продукции). К их разработке
под эгидой ISO привлечен ряд ведущих специалистов фирм в разных отраслях
промышленности. Совокупность стандартов STEP составляет основу CALS-технологий.
Единообразная форма описаний данных о промышленной продукции обеспечивается
введением в STEP языка Express, инвариантного к приложениям.
СЛАЙД 37
Основу STEP составляет язык Express. Это язык унифицированного представления
данных и обмена данными в компьютерных средах. Язык инвариантен к приложениям. Хотя
он разрабатывался с ориентацией, прежде всего, на описание жизненных циклов
промышленных изделий, области его применения значительно шире.
В STEP используются следующие важные понятия:
-
ААМ - Application Activity Model, это функциональная модель IDEF0 для
определенного приложения;
-
ARM - Application Requirements Model, это модель, представляющая данные с
точки зрения пользователя. В частности, в этой модели данные могут быть выражены как
средствами типичными для приложения, так и с использованием синтаксиса языка Express;
-
AIM - Application Interpreted Model; это ARM модель, переведенное в STEP
представление с использованием ряда унифицированных в STEP понятий, закрепленных в
интегрированных ресурсах;
-
АР - Application Protocol; это STEP-стандарт, отражающий специфику
конкретного приложения;
-
SDAI - Standard Data Access Interface; это программный интерфейс к
источникам данных (репозиториям) прикладных систем (в том числе к библиотекам моделей
систем CAD/САМ) с переводом моделей в STEP-файлы, используется в STEP-средах для
организации обменов между приложениями через общую базу данных STEP.
STEP - это совокупность стандартов, состоящих из нескольких томов. Тома имеют
свои номера N и обозначаются как «часть N» или ISO 10303-Ж К настоящему времени
62
разработано более сотни томов. Стандарты ISO 10303 определяют средства описания
(моделирования) промышленных изделий на всех этапах их жизненного цикла.
Том 1 (ISO 10303-1) - вводный стандарт, выполняющий роль аннотации всей
совокупности томов. В этом стандарте вводится ряд терминов, используемых в других
стандартах, например, таких, как продукт (product), приложение (application), проектные
данные {product data), модель {model), модели ААМ, AIM, ARM, прикладной протокол (АР),
интегрированный ресурс (integrated resource), элемент функциональности (unit of
functionality - UoF).
Тома 11-14 - методы описания (description methods).
Тома 21-29 - методы реализации (implementation methods).
Тома 31-35 - основы тестирования моделей (conformance testing methodology and
framework).
Тома 41-50 - интегрированные основные ресурсы (integrated generic resources).
Тома 101-108 - интегрированные прикладные ресурсы (integrated application
resources).
Тома 201-236 - прикладные протоколы (application protocols).
Тома 301-332 - абстрактные тестовые наборы (abstract test suites).
Тома 501-520 - прикладные компоненты (application interpreted constructs).
Ряд томов переведен на русский язык и представлен в виде национальных стандартов
России. Это, например, ГОСТ Р ИСО 10303-1-99, посвященный обзору и основополагающим
принципам STEP, ГОСТ Р ИСО 10303-11-99 -справочное руководство по языку Express,
ГОСТ Р ИСО 10303-21-99 - то же по обменному файлу, ГОСТ Р ИСО 10303-41-99 - описание
интегрированных родовых ресурсов.
Перечисленные документы соответствуют стандартам ISO 10303-1, ISO 10303-11, ISO
10303-21, ISO 10303-41. Подготовлены к утверждению ГОСТ, соответствующие томам 43,
44, 203 стандарта ISO 10303.
Таким образом, в томах STEP описаны основные принципы обмена данными,
изложены правила языка Express, даны методы его реализации. Модели, методы
тестирования моделей, ресурсы как общие для приложений, так и некоторые специальные
(например, геометрические и топологические модели, описание материалов, процедуры
черчения, конечно-элементного анализа и т. п.), введены прикладные протоколы,
отражающие специфику моделей в конкретных предметных областях. Вопросам
взаимодействия АС в STEP уделяется основное внимание - выделена подгруппа томов,
посвященная способам обмена данными между разными системами, созданными в рамках
^Р-технологии.
63
Развитие СЖ^-технологий находит выражение также в разработке серий стандартов
ISO 13584 Parts Library (сокращенно Р Lib), ISO 14959 Parametrics, ISO 15531 Manufacturing
Management Data (Mandate), ISO 18876 Integration of Industrial Data for Exchange, Access, and
Sharing (IIDEAS), ISO 8879 Standard Generalized Markup Language (SGML) (CM. [107, 108]).
Методика концептуального проектирования
Идеи системного подхода и их реализация в объектно-ориентированной методологии
являются естественной базой современного проектирования и управления сложными
системами. Такие понятия, как сложная система, структура, состояние, иерархия, событие,
пришедшие из системотехники, дополненные понятиями класса, объекта, атрибута,
инкапсуляции, отношений обобщения, агрегации и другими, стати основой парадигмы
объектно-ориентированного
проектирования
(ООП),
широко
используемого
в
современных автоматизированных системах. Идеи ООП воплощены в основных языках,
составляющих лингвистическое обеспечение CALS, таких как Express или UML.
Среди
языков,
используемых
в
CASE
(язык
проектирования)
на
стадии
концептуального проектирования сложных систем, господствующее положение в последнее
время занял язык Unified Modeling Language (UML). Язык UML предназначен для описания,
визуализации и документирования объектно-ориентированных систем в процессе их
разработки, в первую очередь их программного обеспечения. В частности, положения этого
языка используются в проекте IIDEAS новых CALS-стандартов.
Разработка модели приложения с помощью языка UML начинается с построения
диаграмм
использования
(use
case
diagram).
Эти
диаграммы
характеризуют
функциональность создаваемой системы с позиций пользователя и служат для отображения
взаимодействия пользователей с проектируемой системой. Па диаграммах в овалах указаны
варианты использования, т. с. те функции, которые должна выполнять система (СЛАЙД 38).
Пользователи изображены в виде стилизованных фигурок, им могут быть не только люди,
но и любые внешние образования, пользующиеся услугами проектируемой системы.
Благодаря
диаграммам
использования
определяется
и
согласовывается
внешняя
функциональность системы и в итоге формируется техническое задание на разработку этой
системы.
Далее разрабатываются диаграммы взаимодействия «пользователь -система», при
этом выявляются необходимые объекты приложения, строятся диаграммы классов,
формируется компонентная структура программного обеспечения.
Для изображения классов ООП используют прямоугольники, которые разделяются на
секции. В верхней секции записывают имя класса, в средней -атрибуты класса, и в нижней процедуры класса (СЛАЙД 38 внизу слева).
64
Классы и их отношения составляют сущность диаграмм классов (class diagram). Связи
(ассоциации) в этих диаграммах показывают линиями между связанными классами, причем
у концов линии можно указать характер отношения («один - к одному», «один - ко многим»
и т. п.). Отношения зависимости, т. е. влияния одного класса на другой, изображают стрелкой
с пунктирной линией, направленной к зависимому элементу (зависимость можно
обнаружить по изменению описания подчиненного элемента, если изменяется описание
влияющего элемента). Если отношением связаны равноправные элементы, то такая
ассоциация изображается сплошной линией, если отношением связано более двух классов,
то в диаграмму добавляется ромбовидная связка, как показано на (СЛАЙД 38 внизу справа).
Частные случаи ассоциаций - обобщение и агрегирование. Отношение обобщения
(наследования) изображают сплошной линией, заканчивающейся незакрашенной стрелкой
около родительского элемента. Отношение агрегирования (отношение «часть - целое»)
показывают такой же линией, но с ромбовидной стрелкой, заканчивающейся у элемента
«целое». Ромбовидная стрелка закрашивается, если ее части не могут существовать без
целого, т. е. если при ликвидации класса «целое» ликвидируются и все его «части». Пример
фрагмента диаграммы классов с отношениями обобщения и агрегирования приведен
(СЛАЙД 38 внизу справа).
На основе диаграмм классов можно в дальнейшем получить имитационную модель
описываемого
приложения
на
терминальном
объектно-ориентированном
языке
программирования.
Диаграммы взаимодействия объектов (interaction diagrams) относятся к диаграммам
процессов, отражающим поведенческий аспект моделирования. Диаграммы взаимодействия
представлены диаграммами последовательностей и кооперации. Кроме них к диаграммам
процессов относятся диаграммы состояний и деятельности.
В
диаграммах
последовательностей
(sequence
diagram),
называемых
также
диаграммами сценариев, отражается последовательность событий, заключающихся в
воздействиях одного объекта на некоторый другой объект. В этих диаграммах объекты
изображаются прямоугольниками и располагаются каждый в своей вертикальной колонке
диаграммы. Ось времени направлена вертикально вниз. От каждого объекта параллельно оси
времени идет так называемые их линии жизни. Каждое событие изображается
горизонтальной линией со стрелкой от линии жизни объекта, посылающего сообщение, к
линии жизни объекта, принимающего сообщение. Над этими линиями возможен
поясняющий текст.
65
Линии располагаются одна над другой в порядке, в котором события совершаются.
Пример диаграммы сценариев дан на СЛАЙДЕ 39 где прямоугольники объектов
расположены в верхней части своих колонок.
Следует отметить, что в диаграммах взаимодействия фигурируют объекта, а не
классы, это отмечается подчеркиванием имени объекта внутри прямоугольника объекта
В диаграммах кооперации (collaboration diagram) объекты, представленные
прямоугольниками, связаны между собой линиями, изображающими сообщения (поток
управления). Сообщения упорядочены по времени появления. Около линии указываются
порядковый номер сообщения, направление потока и, возможно, некоторые другие
пояснения.
Диаграмма состояний (statechart diagram) представляет собой граф перехода
состояний, известный по использованию во многих приложениях, но изображаемый по
правилам языка UML. С помощью диаграммы состояний моделируется последовательность
событий, происходящих в системе.
Вершины графа перехода состояний соответствуют состояниям и в UML
изображаются прямоугольниками с указанием внутри прямоугольников имен состояний и,
возможно, списков внутренних действий, допустимых в данном состоянии. Дуги графа
соответствуют переходам из одного состояния в другое и изображаются линиями с
обычными стрелками. Около линии может быть записано имя события и/или указаны
действия, выполняемые при переходе. Переход срабатывает после выполнения внутренних
действий соответствующего состояния.
После имени события можно в прямых скобках записать так называемое сторожевое
условие - булево выражение А. Переход может сработать только в том случае, если
выражение А принимает значение true.
Диаграммы деятельности (activity diagram) близки по своей семантике к диаграммам
состояний. Различаются они тем, что в диаграммах деятельности каждой вершине графа
соответствует некоторое элементарное действие, и переход в новое состояние происходит по
завершении этого действия. Вершины изображаются прямоугольниками с округлыми
боковыми сторонами, переходы - линиями с обычными стрелками, переходы из нескольких
вершин в одну последующую (переходы типа слияния -join) или из одной вершины в
несколько последующих (переходы типа разделения - fork) - утолщенными короткими
линиями, так же, как изображаются переходы в сетях Петри. Переход по условию в одну из
альтернативных вершин изображается с помощью ромба, из которого выходят дуги
переходов к альтернативным вершинам.
66
В UML используются также диаграммы компонентов и развертывания, которые
применяются для моделирования физической организации системы. Например, к
компонентам
программной
системы
могут
относиться программные
модули,
библиотеки, файлы. В диаграммах развертывания показывают распределение классов
по аппаратным средствам.
Инструментальные средства концептуального проектирования (CASE-системы,
методики IDEF0 и IDEF 1X) (СЛАЙД 40)
1. Типы систем
В
современных
информационных
технологиях
важное
место
отводится
инструментальным средствам и средам разработки АС, в частности, системам разработки и
сопровождения их ПО. Эти технологии и среды образуют системы, называемые CASEсистемами.
Аббревиатура CASE имеет двоякое толкование, соответствующее двум направлениям
использования CASE-систем. Первое из них - Computer Aided System Engineering подчеркивает направленность на поддержку концептуального проектирования сложных
систем, преимущественно слабоструктурированных. CASE-системы этого направления
называют системами CASE для концептуального проектирования. Второе направление
называют Computer Aided Software Engineering, что переводится как автоматизированное
проектирование программного обеспечения. Соответствующие CASE -системы называют
инструментальными CASE или инструментальными средами разработки ПО.
Среди систем CASE для концептуального проектирования различают системы
функционального, информационного или поведенческого проектирования. Наиболее
известной методикой функционального проектирования сложных систем является методика
SADT (Structured Analysis and Design Technique), предложенная P. Россом в 1973 г. и ставшая
в последствии основой стандарта IDEF0 (Integrated DEFintion0).
SADT (акроним от англ. structured analysis and design technique) — методология
структурного анализа и проектирования, интегрирующая процесс моделирования,
управление конфигурацией проекта, использование дополнительных языковых средств и
руководство проектом со своим графическим языком. Процесс моделирования может быть
разделен на несколько этапов: опрос экспертов, создание диаграмм и моделей,
распространение документации, оценка адекватности моделей и принятие их для
дальнейшего использования. Этот процесс хорошо отлажен, потому что при разработке
проекта специалисты выполняют конкретные обязанности.
67
Системы информационного проектирования реализуют методики инфологического
проектирования
баз
данных.
Широко используются
язык
и
методика
создания
информационных моделей приложений, закрепленные в методике IDEF1X. Кроме того,
развитые коммерческие СУБД, как правило, имеют в своем составе совокупность CASE средств проектирования приложений.
Основные положения стандартов IDEF0 и IDEF1X использованы также при создании
комплекса стандартов ISO 10303, лежащих в основе технологии STEP для представления в
компьютерных средах информации, относящейся к проектированию и производству в
промышленности.
Поведенческое моделирование сложных систем используют для определения
динамики функционирования сложных систем. В его основе лежат модели и методы
имитационного моделирования систем массового обслуживания, сети Петри, возможно
применение
конечно-автоматных моделей, описывающих поведение системы как
последовательность смены состояний.
Применение инструментальных CASE-систем ведет к сокращению затрат на
разработку ПО за счет уменьшения числа итераций и числа ошибок, к улучшению качества
продукта вследствие лучшего взаимопонимания разработчика и заказчика, к облегчению
сопровождения готового ПО.
Среди инструментальных CASE-систем различают интегрированные комплексы
инструментальных средств для автоматизации всех этапов жизненного цикла ПО (такие
системы называют Workbench) и специализированные средства для выполнения отдельных
функций (Tools). (СЛАЙД 41) Средства CASE-систем по своему функциональному
назначению принадлежат к одной из следующих групп: 1) средства программирования; 2)
средства управления программным проектом; 3) средства верификации (анализа) программ;
4) средства документирования.
К средствам программирования относятся компиляторы с алгоритмических языков;
построители диаграмм потоков данных; планировщики для построения высокоуровневых
спецификаций и планов ПО (возможно, на основе баз знаний, реализованных в экспертных
системах); интерпретаторы языков спецификаций и языков четвертого поколения;
прототайпер для разработки внешних интерфейсов - экранов, форм выходных документов,
сценариев диалога; генераторы программ определенных классов (например, конверторы
заданных языков, драйверы устройств программного управления, постпроцессоры); кросссредства; отладчики программ. При этом под языками спецификаций понимают средства
укрупненного описания разрабатываемых алгоритмов и программ, к языкам 4GL относят
68
языки для компиляции программ из набора готовых модулей, реализующих типовые
функции достаточно общих приложений (чаще всего это функции технико-экономических
систем).
Управление программным проектом называют также управлением конфигурациями
ПО. Этому понятию соответствуют корректное внесение изменений в программную систему
при ее проектировании и сопровождении, контроль целостности проектных данных,
управление версиями проекта, организация параллельной работы членов коллектива
разработчиков. Использование средств управления конфигурациями позволяет создавать
программные системы из сотен и тысяч модулей, значительно сокращать сроки разработки,
успешно модернизировать уже поставленные заказчикам системы.
Основой средств управления программным проектом является репозиторий - база
данных проекта. Именно в репозитории отражена история развития программного проекта,
содержатся все созданные версии (исходный программный код, исполняемые программы,
библиотеки, сопроводительная документация и
т.
п.), с помощью
репозитория
осуществляются контроль и отслеживание вносимых изменений.
Средства
верификации
служат
для
оценки
эффективности
исполнения
разрабатываемых программ и определения наличия в них ошибок и противоречий.
Различают статические и динамические анализаторы. В статических анализаторах ПО
исследуется на наличие неопределенных данных, бесконечных циклов, недопустимых
передач управления и т. п. Динамический анализатор функционирует в процессе исполнения
проверяемой программы; при этом исследуются трассы, измеряются частоты обращений к
модулям и т. п. Используемый математический аппарат - сети Петри, теория массового
обслуживания.
В последнюю из перечисленных групп входят документаторы для оформления
программной документации, например, отчетов по данным репозитория; различные
редакторы для объединения, разделения, замены, поиска фрагментов программ и других
операций редактирования.
Проектирование ПО с помощью CASE-систем включает в себя несколько этапов.
Начальный этап - предварительное изучение проблемы. Результат представляют в виде
исходной диаграммы потоков данных и согласуют с заказчиком. На следующем этапе
выполняют детализацию ограничений и функций программной системы и полученную
логическую модель вновь согласуют с заказчиком. Далее разрабатывают физическую
модель, т. е. определяют модульную структуру программы, выполняют инфологическое
проектирование баз данных, детализируют графсхемы программной системы и ее модулей.
69
Подсистема CASE в составе системной среды САПР предназначена для адаптации
САПР к нуждам конкретных пользователей, разработки и сопровождения прикладного ПО.
Ее
можно
рассматривать
как
специализированную
САПР,
в
которой
объектом
проектирования являются новые версии подсистем САПР, в частности, версии,
адаптированные к требованиям конкретного заказчика. Другими словами, такие CASEподсистемы позволяют пользователям формировать сравнительно с малыми затратами
усилий варианты прикладных ПМК из имеющегося базового набора модулей под заданный
узкий диапазон конкретных условий проектирования.
Методики IDEF (СЛАЙД 42)
IDEF0 - это более строгая реализация ранее предложенной методики SADT (Structured
Analysis and Design Technique). IDEF0 — методология функционального моделирования
(англ. function modeling) и графическая нотация, предназначенная для формализации и
описания процессов. Отличительной особенностью IDEF0 является её акцент на
соподчинённость объектов при этом рассматриваются логические отношения между
работами, а не их временнАя последовательность. Начиная с момента создания первой
версии, методика успешно применялась для проектирования телефонных сетей, систем
управления воздушными перевозками, производственных предприятий и др.
Блоки представляют функции (работы), их названия выражаются глаголами или
отглагольными существительными. Типичные примеры функций: планировать, разработать,
классифицировать, измерить, изготовить, отредактировать, рассчитать, продать (или
планирование, разработка, классификация, измерение, изготовление, редактирование,
расчет, продажа). Число блоков на одном уровне иерархии - не более 6, иначе восприятие
диаграмм будет затруднено. Число уровней иерархии не ограничено, но обычно - не более 5.
Блоки в диаграммах IDFF0 связаны дугами (стрелками), которые отображают множества
объектов (данных). Управление (control) определяет условия выполнения, примеры
управления: требования, чертеж, стандарт, указания, план. Механизм (mechanism) выражает
используемые средства, например: компьютер, САПР, оснастка, заказчик, фирма. Входы и
выходы могут быть любыми объектами.
Пример диаграммы IDEF0 показан на СЛАЙДЕ 43, где представлены функции,
выполняемые на начальных этапах процесса реинжиниринга предприятия. На диаграмме
показаны четыре этапа подготовки к реинжинирингу на предприятии.
После формулировки заказа на перестройку процессов функционирования на базе
информатизации управления проводится обследование предприятия, выявляются его
структура, информационные потоки между подразделениями, внешние информационные
70
связи, степень компьютеризации, наличие вычислительной сети и т. п. На основании
полеченных данных составляется функциональная модель As Is («как есть») и
разрабатывается модель То Be («как должно быть»). Эта модель верхнего уровня далее
конкретизируется, каждая из функций раскрывается более подробно на диаграммах
следующих уровней.
Методика информационного проектирования приложений IDEF1X основана на
построении информационных моделей приложений в виде диаграмм «сущность - связь». Для
описания сущностей и отношений используется язык диаграмм.
Сущности в IDEF1X-диаграммах изображаются в виде прямоугольников, отношения
- в виде стрелок. Отношения между сущностями в IDEF1X являются бинарными. Выделяют
идентифицирующие отношения - связи типа «родитель - потомок», в которых потомок
(зависимая
сущность)
однозначно
определяется
своей
связью
с
родителем,
и
неидентифицирующие отношения, означающие, что у связанного этим отношением
экземпляра одной сущности может быть (а может и не быть) соответствующий экземпляр
второй сущности.
Методика IDEF0 принята в CASE-технологиях как методика начальных этапов
моделирования
сложных
слабоструктурированных
приложений. Методика
IDEF1X
послужила основой для разработки языка Expree-G для стандартов STEP.
Проблемы практического использования (^-технологий
Проблема внедрения CASE-технологий в практику работы промышленных
предприятий
имеет
организационном
организационный,
плане
прежде
всего
технологический,
необходима
кадровый
убежденность
аспекты.
В
руководителей
предприятий в целесообразности (а в ряде случаев и в неизбежности) перехода к CASEтехнологиям, что позволит сконцентрировать усилия на разработке и реализации планов
реинжиниринга предприятия с постепенным внедрением элементов CASE-технологий. Эти
планы направлены на создание корпоративной автоматизированной системы (КАС),
интегрирующей системы автоматизации проектирования, управления и технологической
подготовки производства. Особую важность вопросы создания КАС на базе CASEтехнологий
имеют
для
производственных
объединений,
включающих
несколько
предприятий.
Автономно функционирующие системы САПР, АСУП, АСУТП уже имеются на
многих предприятиях. Очевидно, что при их интеграции на основе CASE-технологий
собственно задача замены уже используемых систем какими-либо другими не ставится,
поскольку замена - процедура дорогостоящая, длительная и болезненная, требующая
71
переучивания специалистов. Замена может быть вызвана не особенностями CALS, а лишь
выявленной
недостаточной
функциональностью
используемых
систем
(например,
невозможностью проектирования сборок с тысячами компонентов).
Что в этом случае подразумевается под «единой электронной моделью изделия»?
Ответ заключается в следующем: единая электронная модель изделия имеет место, если
любая подсистема или пользователь КАС (с соответствующими полномочиями) может,
обратившись к базе данных системы, получить нужное подмножество данных об изделии,
причем это подмножество будет согласовано с подмножествами, запрашиваемыми другими
подсистемами или пользователями. Очевидно, что подмножества данных (профили),
запрашиваемые конструкторскими, технологическими, управленческими и другими
подсистемами и службами, включают как специфические, так и общие атрибуты, причем
общие атрибуты будут иметь одинаковые значения в каждом подмножестве.
Если на предприятии автоматизация была развита слабо, то создание на нем КАС
нужно начинать с обследования деятельности предприятия. Перед обследованием
формируются и в процессе его проведения уточняются цели обследования - определение
возможностей и ресурсов для повышения эффективности функционирования предприятия
на основе автоматизации процессов управления, проектирования, документооборота и т. п.
Содержание обследования - выявление структуры предприятия, выполняемых функций,
информационных потоков, имеющихся опыта и средств автоматизации. Обследование
проводят системные аналитики (системные интеграторы) совместно с представителями
организации-заказчика.
На основе анализа результатов обследования строят модель, отражающую
деятельность предприятия на данный момент. Такую модель называют As Is «как есть».
Далее разрабатывают исходную концепцию КАС. Эта концепция включает в себя
предложения по изменению структуры предприятия, взаимодействию подразделений,
информационным потокам, что выражается в модели То Be «как должно быть».
Результаты анализа конкретизируются в техническом задании на создание КАС. В
нем
указывают
потоки
входной
информации,
типы
выходных
документов
и
предоставляемых услуг, уровень защиты информации, требования к производительности
(пропускной способности) и т. п. Техническое задание направляют заказчику для
обсуждения и окончательного согласования.
Перевод документов в электронную форму - одна из первых задач внедрения CASEтехнологий. Далее необходимы разработка проекта корпоративной вычислительной сети и
его реализация, выбор, приобретение и установка системы PDM, обучение сотрудников
предприятия работе в КАС.
72
Для успешного внедрения и использования CASE-технологий предприятие должно
располагать инженерными кадрами, знающими методы и умеющими использовать средства
автоматизированного проектирования, поскольку CASE-технологии развиваются прежде
всего на базе САПР.
Концепция проектирования мехатронных модулей и систем (СЛАЙД 44)
Описанный
выше
системный
подход
к
проектированию
на
базе
систем
автоматизированного проектирования с использованием CASE-технологий (объектноориентированное проектирование) является концептуальной основой проектирования
мехатронных модулей и систем.
Концептуальной основой проектирования мехатронных систем являются следующие
положения:
1.
Основой разработки мехатронных систем служат методы совмещенного
(параллельного) проектирования, предполагающие совмещение во времени выполнения
некоторых этапов проектирования, выполняемых последовательно при традиционном
проектировании (например, последовательно выполняется разработка механической,
электронной, сенсорной и компьютерной частей системы с последующей разработкой
интерфейсных блоков)
2.
Синергетический
характер
мехатронных
систем
предопределяет,
что
составные части системы не просто дополняют друг друга, но объединяются таким образом,
что образованная ими система начинает обладать новыми свойствами. При этом
мехатронные системы, в отличие от традиционных, обладают меньшей структурной
избыточностью и большей степенью интеграции. В результате повышается конструктивная
компактность системы (вплоть до миниатюризации в микромашинах), улучшаются
малогабаритные и динамические характеристики машин, упрощаются кинематические цепи.
При этом возникают дополнительные возможности при проектировании мехатронных
систем, наилучшим образом отвечающие требованиям заказчика.
3.
Интегрированные мехатронные элементы выбираются разработчиком уже на
стадии проектирования машины, а затем обеспечивается необходимая инженерная и
технологическая поддержка при производстве и эксплуатации машины. В этом радикальное
отличие мехатронных машин от традиционных, когда зачастую пользователь был вынужден
самостоятельно объединять в систему разнородные механические, электронные и
информационно-управляющие устройства различных изготовителей. Именно поэтому
многие сложные комплексы (например, некоторые гибкие производственные системы в
73
отечественном машиностроении) показали на практике низкую надежность и невысокую
технико-экономическую эффективность.
4.
Проектирование мехатронных систем базируется на идеях модульного
конструирования,
при
котором
из
отдельных
многофункциональных
модулей
(механической, электронной, компьютерной частей системы) компонуются гибкие сложные
системы модульной архитектуры.
5.
В мехатронных системах наблюдается перераспределение функциональной
нагрузки от аппаратных (например, электромеханических) модулей к информационным
(компьютерным) модулям. При этом исключается многоступенчатое преобразование
энергии и информации.
6.
При проектировании мехатронных систем широко применяются методы
визуализации динамических процессов, протекающих в системах, вплоть до использования
систем виртуальной реальности при проектировании сложных технических систем.
7.
Высокий
уровень
интеллектуализации
мехатронных
систем
диктует
необходимость проектирования интеллектуальных систем управления (для борьбы с
неопределенностями,
сопутствующими
функционированию
сложных
динамических
систем). При этом необходим обоснованный выбор интеллектуальных технологий при
проектировании многоуровневых иерархических систем управления.
Практическое
воплощение
данных
принципов
требует
привлечения
всех
современных методов и средств проектирования сложных систем (включая средства
концептуального проектирования), часть из которых было описана выше в данном разделе.
Необходимо отметить, что проектирование является одним из самых ответственных
этапов жизненного цикла промышленных изделий. На этом этапе в значительной степени
закладывается успех выполнения (реализации) всех остальных этапов жизненного цикла, так
как именно на этом этапе проектирования определяются все параметры системы,
технологичность ее производства (изготовления), требования к организации производства,
эксплуатационные качества и возможность утилизации.
В качестве неудачного проекта можно привести пример создания атомных подводных
лодок (а возможно и всей атомной энергетики), когда вопросу утилизации отработавших
атомных установок не было уделено должного внимания. И сейчас этап утилизации этих
установок породил огромные проблемы и опасность для окружающей среды.
Алгоритм проектирования
Проектирование мехатронных модулей основано на совместном анализе их
функциональной, структурной и конструктивной моделей. Целью проектирования
74
мехатронного модуля является преобразование исходных требований в конструкторскую
реализацию и соответствующую документацию, по которой может быть изготовлена эта
система, удовлетворяющая сформулированным показателям качества. При выборе
структуры и конструкции мехатронных модулей следует также учитывать экономические и
эксплуатационные оценки качества.
Общий алгоритм проектирования мехатронного модуля представлен на СЛАЙДЕ 45
Данный алгоритм предусматривает три основных этапа проектирования
— это
последовательно выполняемые функциональный, структурный и конструктивный анализ и
синтез мехатронных модулей. Применяя процедуры функционально-структурного и
структурно-конструктивного анализа, разработчик оценивает принимаемые решения,
стремясь добиться высокого уровня синергетической интеграции элементов. Для
использования методов автоматизированного проектирования формируют взаимосвязанные
функциональную (F-модель), структурную (S-модель) и конструктивную (С-модель)
модели мехатронного модуля.
Определение функции ММ является проблемой концептуального проектирования
Задача проектирования мехатронного модуля включает три основных этапа:
1)
выбор вариантов структурных решений модуля по его заданной функции и их
функционально-структурный анализ. Входной информацией для этого этапа проектирования
является F-модель, а на выходе формируется S-модель мехатронного модуля;
2)
структурно-конструктивный анализ конструкторских решений и построение
С-модели мехатронного модуля;
3) конструкторская реализация выбранного варианта модуля с разработкой
конструкторской документации.
Таким образом, задача проектирования мехатронного модуля заключается в
нахождении наилучшего соответствия между заданной функцией и конструктивным
исполнением.
Ключевой методологической идеей данного подхода является приоритет функции
модуля над ее структурной организацией и конструктивным решением. В мехатронном
модуле заданные функциональные преобразования могут быть реализованы несколькими
наборами структурных блоков, а эти блоки, в свою очередь, могут иметь различное
конструкторское исполнение. Таким образом, при проектировании модуля его структура и
конструктивное решение являются подчиненными по отношению к заданной функции.
Функционально-структурный подход, основанный на эволюционном методе синтеза
технических систем, предложен акад. Е. П. Балашовым и разработан для задач
75
проектирования информационно-управляющих комплексов и вычислительных устройств.
Обычно функционально-структурный подход объединяют со структурно-конструктивным
анализом в общую методику разработки мехатронных модулей. Специфика и сложность
мехатронных модулей заключается в том, что их составляющие части (механическая,
электронная и компьютерная) имеют различную физическую природу, а основные
структурные элементы выпускаются зачастую предприятиями различных отраслей
промышленности.
Фундаментальную
основу
концепции
построения
интеллектуальных
систем
управления сложными динамическими объектами составляют три ключевых положения:
1)
развитие принципа ситуационного управления, когда каждому классу
возможных состояний ставится в соответствие определенный класс допустимых решений;
2)
принцип иерархической организации интеллектуальной системы управления,
включающей в свой состав стратегический уровень планирования поведения, тактический
уровень планирования действий, исполнительный (приводной) уровень и комплекс
информационно-измерительных средств;
3)
принцип обоснованного выбора интеллектуальных технологий, используемых
для решения задач отдельных уровней иерархии управления.
К этим трем положениям следует добавить четвертое, связанное с использованием
концепции модульного конструирования систем управления.
На СЛАЙДЕ 46 показан алгоритм функционирования интеллектуальной системы
управления робототехническим комплексом.
Анализ особенностей и порядка целесообразного функционирования автономных
роботов позволяет сформулировать набор основных требований к
интеллектуальной
бортовой
системы
управления, а
разработке
также измерительно-
информационной подсистемы и средств двусторонней связи как ее неотъемлемых частей.
Эти требования обусловливают состав необходимых функциональных возможностей
интеллектуальной системы управления, включающих человеко-машинный интерфейс,
оценку ситуаций и на основе анализа сенсорной информации, интеллектуальные и моторнодвигательные функции.
Выбор и комплектация оптимального состава элементов для блочно-модульного
построения сложных технических систем того или иного назначения с требуемым набором
функциональных
возможностей
предполагает
необходимость
учета
не
только
количественных данных, но и качественных представлений, оценок и понятий, обобщающих
практический
опыт
проведения
проектно-конструкторских
работ.
Эффективным
инструментом для решения трудно формализуемых задач такого типа служат экспертные
76
системы, обладающие способностями делать логические выводы, давать рекомендации,
обосновывать правильность заключений на основе обработки заложенных в них знаний из
конкретной предметной области по аналогии с действиями квалифицированного
специалиста. Следует отметить, что на протяжении ряда последних лет развитие технологий
разработки экспертных систем является одним из приоритетных направлений автоматизации
программирования. Наиболее веские практические результаты, наглядно иллюстрирующие
уровень современных достижений в этой области, охватывают диапазон от универсальных
экспертных оболочек, таких, как например, EXSYS, GURU и др., до интегрированных
программных сред типа ART, KEE или G2, которые проблемно-ориентированны на создание
прикладных интеллектуальных систем, в том числе функционирующих и в реальном
времени, поддерживают различные формы представления знаний и механизмы вывода
логических заключений, позволяют обеспечить организацию многофункционального
интерфейса с графическим отображением информации, объяснением принимаемых решений
и их трассировкой.
Таким образом, проблема автоматизации блочно-модульного проектирования
механических конструкций, структуры сенсорной и инструментально-технологической
оснастки робота может быть сведена к разработке специализированной экспертной системы,
обобщенная структура которой представлена СЛАЙДЕ 47
Поскольку функциональная и технологическая гибкость интеллектуальных роботов
определяется как кинематической схемой и конструкцией манипулятора, так и в
значительной степени составом сенсорного и инструментального оснащения, то выбор
совокупности этих элементов должен быть реализован в рамках единой экспертной
оболочки, обеспечивающей обращение к соответствующим базам данных и знаний.
Размещение датчиков системы очувствления является не менее важной задачей, чем
выбор ее состава, поскольку установка сенсорных элементов некорректным или
неоптимальным образом может привести к существенному ограничению
возможностей
работы
в
целом.
адаптивных
Большинству датчиков очувствления соответствует
несколько допустимых вариантов установки, которые определяются их назначением,
конструкцией и принципами действия, а также характером выполняемых роботом операций.
Поиск наилучшего из них также может быть включен в состав функций, выполняемых
экспертной системой на этапе выбора оптимального состава системы очувствления робота.
Определение точных параметров установки средств очувствления требует привлечения
специализированных инструментальных процедур, позволяющих учесть характерные
особенности размещаемого устройства, конструкции манипулятора и специфику внешней
среды в режиме моделирования.
77
Описание общего назначения и предполагаемых условий функционирования робота
наряду с результатами проектирования модульной компоновки его механической и
измерительно-информационной подсистем, а также состава технологической оснастки
служат в качестве совокупности исходных данных для разработки комплекта программного
обеспечения интеллектуальной системы управления. Эффективность проведения этих работ,
относящихся к одному из самых сложных и ответственных этапов проектирования
интеллектуальных роботов, может быть обеспечена исключительно с помощью средств
автоматизации, основанных на применении современных информационных технологий и
методов обработки знаний.
В данной связи потенциальные преимущества экспертных систем открывают
широкие перспективы для автоматизации сквозного цикла синтеза и отладки программного
обеспечения интеллектуальных роботов. (СЛАЙД 48) При этом использование единых
принципов построения интеллектуальной системы управления роботом и инструментальных
средств разработки ее программного обеспечения позволяет организовать непосредственную
оценку правильности принимаемых проектных решений с учетом адекватности их
реализации исходным требованиям. Кроме того, обобщенная структура экспертной системы,
предназначенной для автоматизации сквозного цикла синтеза и отладки программного
обеспечения интеллектуальных роботов, должна предусматривать возможность ее
интеграции со средствами машинной графики и геометрического моделирования.
Отличительной особенностью этой экспертной системы является наличие базы
алгоритмов
управления
и
обработки
сенсорной
информации,
представляющих
потенциальный интерес для организации целесообразного поведения интеллектуальных
роботов. Соответствующие алгоритмы управления и реализующие их программноалгоритмические процедуры должны обладать определенной инвариантностью к различным
типам кинематических схем манипуляционных роботов. Подобный набор универсальных
программных средств, необходимых для управления движением роботов в условиях сложно
организованных сцен с препятствиями, может включать следующие процедуры:
-
планирование движений манипулятора и построение оптимальных траекторий
перемещения его эффектора с использованием методов поиска пути на графе;
-
планирование движений манипулятора на основе минимизации функционала
рассогласования его исходного и целевого состояний численными методами или с
применением интеллектуальных технологий;
-
интерполяция движений манипулятора с помощью сплайн-функций;
-
планирование конфигураций и оптимальных перемещений манипулятора в
пространстве его обобщенных координат на основе метода бегущей волны.
78
Обработка и анализ сенсорной информации, ее обобщение и интерпретация являются
важнейшими функциями интеллектуальной системы управления роботом и реализуются с
помощью различных алгоритмов, выбор которых в каждом конкретном случае определяется
комплектацией средств внешнего очувствления. По своему составу база алгоритмов
обработки сенсорной информации должна отражать все многообразие информационноизмерительных
средств,
интеллектуальных
используемых
роботов,
включая
в
системы
качестве
элементов
технического
зрения,
очувствления
лазерные
и
ультразвуковые дальномеры, тактильные датчики и т. д.
Формирование и последующая отладка модульного комплекта программноалгоритмического обеспечения интеллектуальной системы управления регламентируется
содержимым базы знаний, которая может видоизменяться и пополняться в режиме
редактирования или самообучения.
Мощным средством моделирования и проектирования мехатронных систем является
пакет True Space. По своим функциональным возможностям этот пакет относится к системам
проектирования так называемой «виртуальной реальности» как некоторой искусственной
модели естественного мира, адекватно отражающей его специфику, нюансы и основные
физические закономерности.
Использование методов
и
технологий «виртуальной
реальности» позволяет не
только повысить эффективность процессов автоматизированного синтеза и отладки
программно-алгоритмического обеспечения интеллектуальных роботов, но и организовать
их предварительное обучение на основе моделирования потенциально допустимых ситуаций
с учетом возможных неопределенностей. Целью такого обучения по примерам является
отыскание наилучших форм целесообразного поведения в условиях реальной обстановки и
автоматическое формирование правил, регламентирующих последовательность действий
робота в тех или иных случаях.
Интеграция преимуществ современных технологий обработки знаний, машинного
моделирования и компьютерной графики в составе единого комплекса инструментальных
средств автоматизации проектирования интеллектуальных роботов открывает широкие
возможности для решения различных прикладных задач, далеко выходящих за рамки его
прямого значения. К этой сфере в полной мере могут быть отнесены задачи технологической
подготовки гибких автоматизированных производств, их проектирование и моделирование,
обоснованный выбор требуемого робототехнического оборудования и его автономное
программирование.
Проектирование роботизированных технологических комплексов
Общие сведения о робототехнических комплексах и их классификация
79
(СЛАЙД 49) К робототехническим комплексам относится любая система машин,
работающая с человеком и/или без него, включающая хотя бы один робот, с функциями, без
которых система не обеспечивает установленных показателей качества ее работы.
Классификация робототехнических комплексов.
1. По служебному назначению.
1.1. Робототехнологические (промышленные).
1.1.1. Применяемые для производства изделий машино- и приборо-строения.
1.1.2. Применяемые в пищевой промышленности.
1.1.3. Сельскохозяйственные.
1.1.4. Применяемые в горнодобывающей промышленности.
1.1.5. Применяемые в иных видах промышленности.
1.2. Военные.
1.2.1. Для ведения боевых действий в контактном бою.
1.2.2. Разведывательные (наземные, аэрокосмические, для водной среды).
1.2.3. Инженерносаперные (постановка мин и разминирование).
1.2.4. Применяемые для иных военных целей.
1.3. Сельскохозяйственные.
1.4. Аэрокосмические.
1.5. Применяемые в водной среде.
1.6. Транспортные, наземные, общего назначения.
1.7. Для чрезвычайных ситуаций.
1.7.1. Для борьбы с пожарами.
1.7.2. Для работы в условиях радиоактивного и химического заражения.
1.7.3. Для иных чрезвычайных ситуаций.
1.8. Медицинские.
1.8.1. Применяемые в медицинских технологиях (хирургические, терапевтические,
диагностические и т. п.).
1.8.2. Применяемые для реабилитации инвалидов.
1.8.3. Применяемые для ухода за больными.
1.9. Бытового назначения.
1.10. Спортивные и физкультурные.
1.11. Применяемые для отдыха и развлечений.
1.12. Для научных исследований.
1.13. Применяемые в производстве художественных изделий.
1.14. Применяемые в иных сферах человеческой деятельности.
80
Понятие о роботизированных технологических комплексах.
Роботизированный технологический комплекс (РТК) — это совокупность средств
технологического оснащения (СТО), образующая взаимосвязанную систему, включающую
промышленный робот (ПР) и предназначенную для автоматизированного выполнения одной
или нескольких операций производственного процесса.
Основные компоненты РТК: основное технологическое оборудование (СТО) (в том
числе и ПР); оснастка (приспособление и инструмент); транспортная система (в том числе и
ПР); устройства хранения элементов материального потока (ЭМП), проходящего через РТК;
система энергопитания; система удаления отходов; автоматизированная система управления
(АСУ РТК); система обеспечения безопасности (в том числе и при авариях).
(СЛАЙД 50) Классификация РТК машиностроительных и приборостроительных
производств.
1. По виду производства.
1.1. По организационной структуре производства (простое производство (линейное,
расходящееся (например, производство широкой номенклатуры деталей), сходящееся
(например, сборочное), комбинированное)).
1.2.
По
доминирующей
технологии
производства
изделий
РТК
(механообрабатывающее, обработка давлением, литейное, сборочное и т. п.).
2. По типу производства (единичное, мелкосерийное, серийное, крупно серийное,
массовое).
3. По степени изменчивости номенклатуры изделий (гибкости производства).
3.1. Специальное производство одного типа изделий.
3.2. Гибкое производство широкой номенклатуры изделий (гибкие производственные
системы ГПС в терминах, установленных ГОСТ 26228?90).
3.2.1. РТК как гибкий производственный модуль (ГПМ).
3.2.2. РТК как гибкая производственная ячейка (ГПЯ), состоящая из ГПМ.
4. По степени инновации производства (реконструкция, новое строительство, типовые
или нетиповые проекты).
5. По способу использования ПР (как основные СТО, как вспомогательные СТО,
смешанное использование).
6. По степени автоматизации управления (автоматическое, автоматизированное).
7.
По
архитектуре
автоматизированной
системы
управления
(АСУ)
РТК
(централизованная, распределенная).
81
8. По функциям человека-оператора в работе РТК (регламентное обслуживание,
переналадка, управление, наблюдение, комбинированные
функции).
Понятия о гибкости производства весьма разнообразны и многоплановы и
существенно зависят от типа и вида производства. Приведем встречающиеся в источниках
информации некоторые признаки гибкости.
1. Возможность монтажа всей номенклатуры комплектующих выпускаемого изделия
для сборочных РТК.
2. Возможность изменения номенклатуры изделий без замены транспортнонакопительной системы и/или основных СТО.
3. Способность быстрого и экономически обоснованного перехода на выпуск иной
продукции.
4. Возможность производить продукцию установленной номенклатуры разными
способами и из разных материалов, полуфабрикатов или комплектующих изделий.
5. Обеспечение оптимальных затрат при переходе с любого вида продукции
установленной номенклатуры на любой другой из этой номенклатуры.
6. Возможность модернизации отдельных видов оборудования без изменения всей
компоновки РТК.
7. Наличие технической, математической, информационной поддержки оборудования
РТК.
8. Работоспособность с допустимой потерей производительности при отказах
отдельных компонентов РТК.
9. Возможность ГПС сохранения эффективности при различных объемах заказов на
продукцию РТК.
10. Способность изменения номенклатуры продукции РТК за счет введения новых
технологий, организационных, технических и других мероприятий при сохранении
эффективности.
11. Возможность изменения технологического маршрута.
12. Возможность замены СТО при переходе на новый вид продукции установленной
номенклатуры.
13. Возможность управления от разных АСУ.
14. Способность самонастройки при возмущениях в работе.
15. Возможность автоматического самоконтроля за выполнением операций.
16. Способность функционировать в автоматическом, автоматизированном
82
и в ручном режиме с возможной допустимой потерей производительности.
17. Возможность обмена данными в рамках установленной сети информационного
обмена.
Показатели качества РТК:
•
производительность;
•
гибкость и ее вид; эффективность;
•
показатели надежности; состав технологических операций и их показатели
качества;
•
время перехода на новый тип изделия, показатели степени законченности
продукции;
•
эксплуатационные
показатели
(время
работы
без
участия
человека,
численность персонала, занимаемая площадь, время регламентированного простоя
(коэффициент технического использования), требования к квалификации операторов и
персонала для регламентных работ);
•
удельные затраты материальных энергетических и трудовых ресурсов;
•
эргономические показатели; эстетические показатели;
•
степень конкурентоспособности; степень стандартизации и унификации;
•
патентно-правовые показатели (степень патентной защиты технических
•
решений);
•
экологические показатели; показатели безопасности для персонала.
ПРОЦЕСС ПРОЕКТИРОВАНИЯ РТК (СЛАЙД 51)
От любой другой системы машин РТК отличается наличием хотя бы одного ПР, что и
порождает специфику проектирования РТК.
Первый круг специальных проблем состоит в том, что ПР — это качественно
отличный, например, от станков, функционально самостоятельный класс машин, который, с
одной стороны, берет на себя функции человека-оператора в данной системе машин, а с
другой — не обладает его возможностями. При этом стоимость роботизированного
обслуживания может превышать стоимость обслуживания комплекса человеком. Отсюда
возникает проблема экономической эффективности РТК.
Второй круг специальных проблем состоит в том, что при обслуживании комплекса
человеком последний может решить неопределенное множество нерегламентированных
производственных задач, избыточность же функций робота порождает его высокую
стоимость и делает его неконкурентоспособным и малонадежным. Отыскание оптимального
83
решения по роботизации, оптимального круга функций человека-оператора является второй
группой специальных проблем.
Третий круг специальных проблем состоит в том, что для проектирования РТК
требуется привлекать много разных специалистов, например, технологов, системотехников,
механиков, специалистов по электронике, математиков, специалистов по автоматике и
измерительной технике, экономистов, взаимодействие которых не всегда просто
осуществить.
Процесс проектирования РТК стандартизован в своей результативной части.
Стандартизованы стадии проектирования и отчетные документы по каждой стадии, их
содержание. Разделение работ между конструкторами, проектировщиками и другими
специалистами на уровне государственных стандартов не регламентировано, но многие
предприятия такой стандарт имеют.
В процессе создания РТК можно выделить два субъекта с качественно различными
функциями, назовем их Заказчик и Разработчик.
Проектированию всегда предшествует ряд работ, выполняемых Заказчиком, целью
которых является проведение анализа реальной необходимости создания РТК с точки зрения
хозяйственной целесообразности, наличия реальных пользователей и их количества,
технической возможности и экономической обоснованности создания РТК, разработки
структуры инвестиций в проект (изыскание источников финансирования, определение
партнеров), определение всех участников проекта и юридическое оформление отношений с
ними.
Документы
этой
стадии
на
уровне
государственных
нормативов
(кроме
законодательных) не регламентируются. Эта стадия называется предпроектной и участие в
ней, по приглашению Заказчика, может принимать и Разработчик.
Стадии проектирования, выполняемые Разработчиком: техническое задание;
техническое предложение; эскизный проект; технический проект; рабочая документация.
Стадия технического задания (ТЗ) обязательна. ТЗ является основным юридическим
документом, регулирующим отношения Заказчика и Разработчика.
На этапе технического предложения определяют принципиально возможные способы
выполнения ТЗ, выбирают ряд проектных решений, наиболее предпочтительных с точки
зрения выбранных критериев, и решают вопрос целесообразности дальнейшей разработки
остальных вариантов. Стадия необязательна.
Эскизный проект— комплекс проектных документов, дающих общее представление
об объекте проектирования, принципе его работы, назначении, основных параметрах,
84
габаритах. В эскизном проекте могут излагаться несколько вариантов, подлежащих
уточнению. Стадия необязательна.
Технический проект (ТП) содержит полное и окончательное представление об
устройстве РТК. Документация ТП определена ГОСТ и, в частности, содержит опись
документов проекта; пояснительную записку; расчет технико-экономических показателей
(ТЭП); смету затрат; схему функциональной структуры и описание постановок задач
контроля и управления (для сложных устройств); документацию математического
обеспечения (пояснительная записка, описание алгоритмов, ТЗ на программирование);
документацию информационного обеспечения; схемы структурные; схемы принципиальные
(электрическая, гидравлическая, пневматическая); проектную оценку надежности; план
возможного расположения; чертежи общего вида; таблицы соединений и подключений;
ведомость оборудования и материалов; задание на проектирование в смежных частях
проекта; схему организационной структуры.
Документация рабочего проекта включает те же документы, что и ТП, и
дополнительно:
документацию
программного
обеспечения;
полный
комплект
конструкторской документации; спецификацию всех элементов; формуляр системы
(технический паспорт); инструкцию по эксплуатации.
Этапы технического и рабочего проектирования допускается объединять в этап
технорабочего проекта.
Организация работ по созданию РТК не регламентирована, но основные ее положения
прочно вошли в практику. Заказчик устанавливает юридические или административные
отношения с Разработчиком, после чего Разработчик приступает к проекту. Разработчик
назначает главного инженера (главного конструктора, главного менеджера проекта),
который обеспечивает координацию всех работ. Разработчик самостоятельно привлекает
соисполнителей по работе и несет за них ответственность перед Заказчиком.
После разработки ТЗ оно согласовывается с Заказчиком и утверждается им.
Утвержденное ТЗ является основным документом. На основе ТЗ выполняют техническое
предложение, эскизный проект и технический проект, который также утверждается в
установленном порядке.
Затем выпускают рабочую документацию, передаваемую Изготовителю через
Заказчика. После выпуска всей установленной документации начинается этап монтажноналадочных работ (МНР) по РТК, заканчивающийся его испытаниями, по результатам
которой составляется акт.
85
Разработчик принимает участие в изготовлении (авторский надзор) нетиповых
устройств РТК, в МНР и испытаниях РТК и вносит необходимые согласованные коррективы
в техническую документацию.
Дополнения и изменения в ТЗ допустимы только в том же порядке, что и выпуск ТЗ.
При выполнении проектов Разработчик обязан использовать все нормативные акты,
регулирующие эту область.
ПРЕДПРОЕКТНЫЕ РАБОТЫ ПРИ СОЗДАНИИ РТК
Предпроектные
работы
выполняются,
как
правило,
Заказчиком
с
целью
обоснованного формирования заказа на проектирование РТК. Потребность в РТК возникает
тогда, когда существующие производства морально устарели, малоэффективны, не
пользуются спросом или не решают новых задач.
Исходные данные для предварительного решения о необходимости создания РТК
формируются из тех же соображений, что и исходные данные для любой мехатронной
системы.
Принятие решения о необходимости проектирования и производства РТК должно
сопровождаться точнейшим и обоснованным расчетом возврата инвестиций и ожидаемой
прибыли. Одним их принятых в мировой практике методов такого расчета является бизнесплан.
Экономические критерии качества проекта РТК (как правило, результат бизнеспланирования) называют глобальными критериями.
Локальные критерии качества предъявляют требования к подсистемам РТК и не
противоречат глобальным.
Для решения вопроса о технических требованиях к вновь создаваемому РТК
привлекаются следующие сведения:
•
данные об устройствах, которые будут работать с вновь создаваемым РТК;
•
данные о необходимой доработке устройств, которые будут работать с вновь
создаваемым РТК;
•
степень влияния параметров вновь создаваемого РТК на параметры процессов,
в которых создаваемый РТК будет участвовать;
•
данные о среде, на которую ориентирован создаваемый РТК;
•
данные о влиянии новых качеств создаваемого РТК на организационно-
экономические параметры производства (коэффициент сменности, форму специализации,
тип
производства,
систему
оперативного
планирования,
материально-техническое
снабжение и т. п.), быта или другой среды использования РТК;
86
•
данные
о
социальных
последствиях
использования
новых
качеств
проектируемого образца на производстве (потребность в квалификации персонала,
требования к возрасту, образованию, стажу работы, изменения в интенсивности труда,
влияние на заработную плату и т. п.);
•
данные о влиянии новых качеств создаваемого образца на существующие
конструкции предметов труда и технологическую подготовку производства или другие
параметры среды использования РТК;
•
данные о влиянии характеристик нового РТК на компоновку или планировку
среды использования, возможность их наладки и ремонта;
•
данные
автоматизированной
о
влиянии
системы
характеристик
управления
и
нового
других
РТК
на
систем,
параметры
обеспечивающих
функционирование среды использования;
•
данные
о
влиянии
характеристик
нового
РТК
на
безопасность
жизнедеятельности в среде использования;
•
данные о результатах социологических исследований по последствиям
внедрения РТК;
•
лимитная цена РТК и лимитная стоимость проектирования РТК. В результате
анализа этих сведений разрабатывают:
•
технико-экономическое обоснование создания нового РТК;
•
исходные данные для разработки технического задания на проектирование;
•
схему инвестирования и ее юридическое оформление;
•
заявку на проектирование, контракт или систему контрактов.
В процессе предпроектных работ могут проводиться научные исследования для
подтверждения или опровержения определенных концепций, например, для подтверждения
технической возможности и экономической целесообразности обеспечения того или иного
параметра.
ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ПРОЕКТИРОВАНИЕ РТК
Общие вопросы разработки технического задания (ТЗ) на проектирование РТК.
Основными разделами ТЗ являются:
1.
Наименование и область применения РТК.
2.
Исходные данные для проектирования.
3.
Назначение РТК.
4.
Основные технические требования к РТК.
87
5.
Технико-экономические показатели РТК.
6.
План-график проектирования и внедрения.
7.
Обязанности сторон.
8.
Иные разделы по соглашению сторон.
Примерная схема состава ТЗ на проектирование РТК.
1.
Наименование РТК и область его применения. Наименование должно
содержать информацию об основном назначении РТК, например «РТК закалки
цилиндрических зубчатых колес».
1.1. Область применения РТК.
1.1.1. Вид основного производства.
1.1.2. Тип основного производства.
1.1.3. Возможности дополнительного использования РТК (например, РТК закалки
цилиндрических зубчатых колес может использоваться для закалки деталей другой формы,
для операций отпуска и т. п.).
1.1.4. Дополнительные организационно-технические мероприятия, расширяющие
область применения РТК.
2. Исходные данные для проектирования.
2.1.
Численные показатели по типу производства по основной номенклатуре
продукции РТК.
2.2. Метод производства — поточное, непоточное.
2.2.1. Поточное производство — однопредметное, многопредметное.
2.3. Характер движения предметов труда: непрерывный, прерывный.
2.4. Расчетный такт (ритм) поточной линии.
2.5. Предельно допустимое время простоя оборудования в смену.
2.6. Коэффициент сменности.
2.7. Режим работы РТК.
2.8. Численные показатели по виду производства основной номенклатуры продукции
РТК.
2.9. Схема размещения СТО, план производственных площадей. 2.10.ОписаниеСТО.
2.10.1. Основное оборудование: вид, тип, типоразмер, габарит, габарит рабочего
объема
технологического
оборудования
(РОТО),
степень
автоматизации,
производительность, тип фундамента, способ установки и крепления, способ уборки
отходов,
охлаждение,
смазка,
возможности
автоматического
контроля
качества
технологического процесса в РОТО.
88
2.10.2. Оснастка: количество, вид, тип, типоразмер, габарит, степень автоматизации,
размерные параметры относительно РОТО, размерные габариты относительно предметов
труда, тип привода зажима, схема размещения предмета труда в РОТО.
2.10.3. Транспортно-накопительные устройства на границах РТК: тип, габариты,
степень автоматизации, размерные параметры, размерные параметры относительно РОТО,
емкость, способ фиксации предмета на позиции ориентированной выдачи, способ фиксации
предмета в точке сброса в навал.
2.10.4. Средства контроля: типы, количество, габариты, степень автоматизации,
способ измерения.
2.11. Форма заводской специализации (предметная, технологическая, подетальная).
2.12. Данные о предметах труда.
2.12.1. Номенклатура.
2.12.2. Годовая программа.
2.12.3. Описание изделий-представителей.
2.12.3.1. Конструкторская документация.
2.12.3.2.
Данные
о
технологии
изготовления:
операционные
карты;
тип
технологического процесса (индивидуальный, групповой, типовой); особенности запуска
СТО (с переналадкой, без переналадки); характеристика отходов и способ их удаления;
описание заготовок или сырья (материала).
2.13. Сведения о роботизации производства.
2.13.1. Степень реконструкции производства при роботизации (новое строительство,
реконструкция).
2.13.2. Способ использования ПР, предлагаемый заказчиком (в качестве основного
СТО, в качестве вспомогательного СТО, индивидуальное или групповое использование).
2.14. Сведения о степени участия человека при функционировании РТК.
2.14.1. По функциям человека в управлении РТК.
2.14.2. По функциям человека в переналадке РТК.
2.15.
Условия эксплуатации РТК: параметры среды (температура, влажность,
давление, загрязненность, загазованность, наличие агрессивных сред), наличие вибраций и
ударов и их параметры.
3. Назначение РТК.
3.1. Функциональная структура.
В этом разделе формируют все функции РТК по отношению к преобразованию:
■ входного материального потока в выходной;
89
■
входной
информации
и
внутренней
информации
в
информацию
автоматизированного управления, смежных систем, информацию для персонала РТК;
■ энергии одного вида в другую;
■ структуры действующих машин РТК.
Каждая
описанная
в
ТЗ
функция
должна
сопровождаться
сведениями
о
периодичности ее выполнения (по программе, по расписанию, периодически, по запросу,
спорадически и т. п.), о режиме выполнения (автоматически, автоматизированно, вручную),
о способе наблюдения за выполнением функции (с помощью сенсоров, непосредственно
человеком, по логическим уровням и т. п.), об оценках качества функционирования —
критериях качества РТК. Все функции РТК представляют в виде описания функций и связей
между ними, образующего функциональную структуру.
3.2. Критерии качества функционирования РТК.
3.2.1. Глобальные критерии качества проекта.
3.2.1.1. Величина приведенных затрат
3.2.1.2. Коэффициент экономической эффективности
3.2.2. Критерии качества локальных функций.
3.2.2.1. Время реакции на инициирующее воздействие
Общие технические показатели.
4. Технические требования к РТК.
4.1. Численные значения критериев качества, например f2
0,5 мм для
выходного накопителя РТК.
4.2. Требования к безопасности РТК в соответствии с системой стандартов
безопасности труда (ССБТ).
4.3. Требования эргономики.
90
Вопросы к экзамену:
1. Укажите основные компоненты системотехники.
2. Укажите основные иерархические уровни.
3. Приведите примеры иерархической структуры технических объектов, их
внутренних, внешних и выходных параметров.
4. Почему проектирование обычно имеет итерационный характер?
5. Назовите основные стадии проектирования технических систем.
6. Укажите типовые проектные процедуры.
7. Дайте характеристику этапов жизненного цикла промышленной продукции.
8. Назовите основные типы промышленных автоматизированных систем (АС).
9. Укажите место САПР среди других АС.
10. Назовите основные подсистемы и разновидности САПР.
11. Охарактеризуйте основные этапы проектирования АС.
12. Определите понятие «открытая система». Чем обеспечивается открытость системы?
13. Дайте определение понятия «совмещенное проектирование».
14. Какие причины привели к появлению и развитию CALS-технологий?
15. Дайте определение понятия «единое информационное пространство» (ЕИП).
16. Сформулируйте основные свойства ЕИП.
17. Опишите задачи, решаемые системой управления данными (PDM-системой).
18. Дайте определение и сформулируйте назначение STEP-стандартов.
19. В чем состоит методика концептуального проектирования?
20. Укажите основные инструментальные средства концептуального проектирования
(CASE-системы, методики IDEE0 и IFF1X). Опишите их функции и назначения.
21. Сформулируйте основные проблемы практического использования CALSтехнологий.
22. Какие положения являются основой концепции проектирования мехатронных
систем?
23. Опишите общий алгоритм проектирования мехатронных систем. Какие этапы
содержит этот алгоритм?
91
24. Укажите основные принципы, лежащие в
интеллектуальных систем управления сложными объектами.
основе
проектирования
25. Опишите обобщенную структуру экспертной системы для проектирования
мехатронных систем.
92