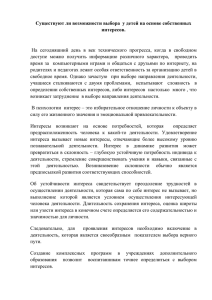
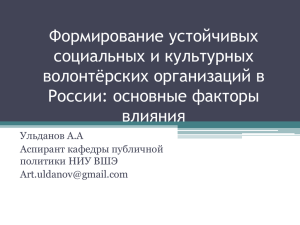
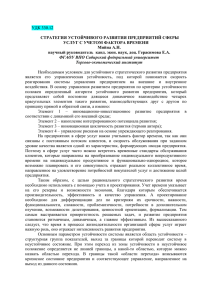
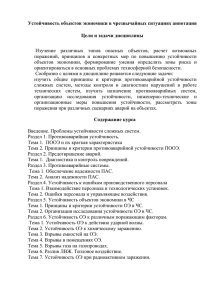
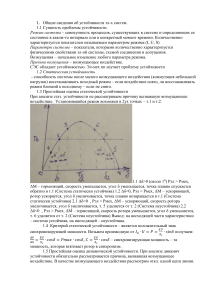
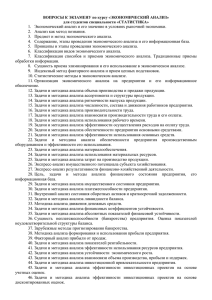
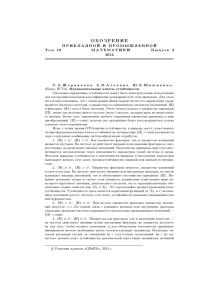
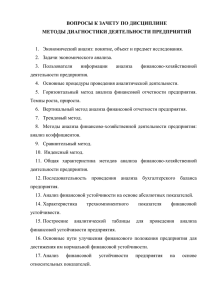
Лабораторная работа №7. Устойчивость автоматических систем Введение Ранее было показано, что обеспечение отсутствия установившейся ошибки регулирования еще не является гарантией высокого качества регулирования. Установившееся состояние системы может в принципе не возникнуть или же показатели качества регулирования, такие как время регулирования или перерегулирование могут не удовлетворять требованиям. Более того, высокие показатели качества регулирования не гарантируют того, что при некотором даже относительно малом изменении динамических свойств объекта управления качество управления останется на прежнем уровне. Для того чтобы обеспечить подобные гарантии используют такие показатели как запасы устойчивости. Определение этих показателей требует предварительного ознакомления с общим понятием устойчивости и видами устойчивости автоматических систем. Общее понятие устойчивости В качестве примера рассмотрим три системы, выходным параметром которых является положение шарика на рис. 82. В случае на рис. 82,а если воздействовать на шарик, то он кратковременно покинет положение в середине ямки, но далее через некоторое время вернется точно в исходное положение. Такую устойчивость называют асимптотической. В случае на рис. 82,б если воздействовать на шарик, то он переместится в новое положение и остановится через некоторое время под действием силы трения. Такую устойчивость называют устойчивостью нейтрального типа. В случае на рис. 82,в если воздействовать на шарик, то он покинет единственно возможное состояние равновесия на вершине горки и далее его положение на горке начнет неограниченно изменяться. Такую систему считают неустойчивой. а) б) в) Рис. 82. Различные положения шарика с позиции устойчивости: а) асимптотическая устойчивость; б) устойчивость нейтрального типа; в) неустойчивое положение Таким образом, случаи на рис. 82,а и 82,б соответствуют устойчивой системе, а случай на рис. 82,в – неустойчивой. Это позволяет предложить понятие устойчивости типа «вход-выход». 93 Понятие устойчивости типа «вход-выход» При управлении технической системой достаточно важно, чтобы в системе не возник неустойчивый режим, который сопровождается непрерывным нарастанием амплитуды колебаний регулируемого параметра. В итоге это приводит к тому что, значение регулируемого параметра непрерывно с максимальной скоростью меняется от минимума до максимума или выходит на минимум или максимум и не меняется более. При этом система может никак не реагировать на изменение сигнала задания. Обычно в такой ситуации инженеры говорят, что система управления пошла в разнос. Система, в которой отсутствует подобный режим, обладает устойчивостью вида «вход-выход». Понятие внутренней устойчивости Для понимания понятия внутренней устойчивости вновь обратимся к дифференциальному уравнению, описывающему динамику системы, которое определяет связь между входным (X) и выходным (Y) параметрами: an d nY d n a n1 d n1Y d n1 ... a 0 bm dmX d m bm1 d m1 X d m1 ... b0 , где a, b – постоянные коэффициенты; n, m – порядок производных. Запишем дифференциальное уравнение в условном виде с применением символа дифференцирования p: (a n p n a n1 p n1 ... a0 ) Y (bm p m bm1 p m1 ... b0 ) X , где p d / d – символ дифференцирования. Допустим, что на систему отсутствуют внешние воздействия. Это означает, что X(τ) = const. При этом все производные от X по времени равны нулю. То есть, значения коэффициентов b при производных от X, начиная с первого порядка, не влияют на динамику системы. В таком случае динамика системы определяется только начальным состоянием системы, которое определяется значениями Y(τ=0) и производными Y различных порядков в начальный момент времени. Это означает, что для оценки поведения такой системы может использоваться передаточная функция вида: Wxy p 1 an n an -1 n -1 an -2 n -2 a p p p ... 0 b0 b0 b0 b0 . (85) Математически конкретное определение внутренней устойчивости предложено Ляпуновым. Система устойчива по Ляпунову, если при начальном отклонении от равновесия Y* не более чем на , траектория дальнейшего движения отклоняется от Y* не более чем на (рис. 83): Y0 Y * < , Y Y * < . 94 Рис. 83. Понятие устойчивости по Ляпунову [1] Оценка внутренней устойчивости по передаточной функции Известно, что решение дифференциальных уравнений, имеющих форму записи (85), можно представить в следующем виде: Wxy p 1 , s n s n1 s n2 ... s 1 Y k1e1 k2e2 ... kn en , (86) где k – коэффициенты, которые зависят от начальных условий. Из вида (86) следует, что обеспечить затухание переходного процесса возможно, если все корни имеют отрицательные вещественные части. Тогда (86) представляет собой сумму затухающих экспонент. Для нахождения коней необходимо решить уравнение, приравняв к нулю знаменатель передаточной функции замкнутой системы. Такое уравнение называют характеристическим уравнением системы. Здесь следует отметить, что система может обладать внутренней устойчивостью и в некоторых случаях, когда некоторые корни имеют положительные вещественные части. Однако, если все корни имеют отрицательные вещественные части, то это гарантирует устойчивость системы. То есть выполнение такого условия является достаточным для гарантии устойчивости. Пример. Пусть объект управления представлен апериодическим звеном первого порядка с постоянной времени T1 = 10. При управлении используется интегрирующий регулятор с постоянной времени Tи = 0.01с. Найдем передаточную функцию замкнутой системы: 1 Wр s , Tи s T1s 1 Wр s 1 1 1 . 2 2 Wр s 1 Tи s T1s 1 1 TT s T s 1 0.1 s 0.01 s 1 1 и и Характеристическое уравнение имеет вид: Wз s 0.1s 2 0.01s 1=0. Решим уравнение (87): 95 (87) D b2 4ac 0.0001 4 0.1 0.14, 1 , 2 0.01 0.14 0.14 0.05 . 2 0.1 2 0.1 Таким образом, корни имеют отрицательную вещественную часть, равную –0.05 и, следовательно, система устойчива. Однако близость к нулю вещественной части корней может быть свидетельством того, что система близка к границе устойчивости. Для проверки выполним моделирование с использованием графического языка (рис. 84). В примере для инерционного звена задано начальное значение в пять единиц при задании, равном нулю. Для моделирования шаг симуляции был уменьшен до 0.0001 секунды для точного учета малых постоянных времени. Рис. 84. Пример системы, обладающей внутренней устойчивостью Из примера видно, что система устойчива, но колебания затухают относительно медленно. То есть система близка к границе устойчивости. Некоторым недостатком рассмотренного метода оценки устойчивости являются сложности, которые могут возникнуть при нахождении корней для полиномов высоких порядков. Так, например, аналитическое решение известно для случая полинома четвертого порядка (метод резольвент), но для более высоких порядков общие методы решения отсутствуют. Это привело к широкому распространению методов, которые дают оценку устойчивости без нахождения корней характеристического уравнения. Критерий устойчивости Найквиста Достаточно простой критерий оценки устойчивости замкнутой системы был предложен Х. Найквистом. Согласно этому критерию, для обеспечения устойчивости замкнутой системы достаточно, чтобы годограф АФЧХ разомкнутой системы не охватывал точку с координатой (-1;0). В примере на рис. 85,а, годограф АФЧХ разомкнутой системы не охватывает точку (-1;0) и замкнутая система устойчива, а на рис. 85,б годограф АФЧХ 96 разомкнутой системы охватывает точку (-1;0) и замкнутая система может быть не устойчива. а) б) Рис. 85. Пример годографов АФЧХ разомкнутой системы когда: а) замкнутая система устойчива; б) замкнутая система не устойчива [1] Критерий устойчивости Найквиста достаточно удобен для практического использования. Дело в том, что многие системы утрачивают устойчивость именно вследствие наличия отрицательно обратной связи. Поэтому может быть удобно оценить частотные свойства разомкнутой системы, которая обладает устойчивостью. Пример. Пусть объект управления представлен двумя апериодическими звеньями первого порядка с одинаковой постоянной времени T1 = 10. При управлении используется интегрирующий регулятор с постоянной времени Tи = 10с. Приведем годограф АФЧХ разомкнутой системы (рис. 86). Рис. 86 Пример годографа АФЧХ разомкнутой системы 97 В примере на рис. 86 годограф АФЧХ разомкнутой системы не охватывает точку с координатой (-1;0) и следовательно замкнутая система будет устойчива. Для проверки выполним моделирование с использованием графического языка (рис. 87). Рис. 87. Переходный процесс в замкнутой системе Из рис. 87 видно, что система устойчива. Критерий устойчивости Найквиста часто используют для определения запасов устойчивости по амплитуде (Ag) и по фазе m (рис. 88). Рис. 88. Определение запасов устойчивости по годографу АФЧХ разомкнутой системы [1] Критерий устойчивости Гурвица Критерий устойчивости Гурвица является косвенным критерием для оценки знаков корней характеристического уравнения замкнутой системы. Действительно, для оценки устойчивости сами значения корней не требуются, достаточно оценить знаки их вещественной части. Пусть характеристическое уравнение системы имеет вид: a0 p n a1 p n-1 a2 p n-2 ... an 0. 98 Критерий Гурвица предполагает построение матрицы размером n строк и n столбцов. Первая строка содержит все элементы с нечетными номерами, а оставшиеся элементы заполняются нулями. Вторая строка содержит все элементы с четными номерами, а оставшиеся элементы заполняются нулями. Третья и четвертая строка получаются путем сдвига первой и второй строки на одну позицию вправо и т.д. Так при n = 5 матрица будет иметь вид: Согласно критерию Гурвица, все корни характеристического уравнения имеют отрицательную вещественную часть, если все главные миноры матрицы Гурвица положительны. Для матрицы Гурвица в примере главные миноры имеют следующий вид: Пример. Пусть передаточная функция разомкнутой системы имеет вид: ( ) Найдем передаточная функция замкнутой системы: ( ) ( ) ( ) Запишем коэффициенты характеристического уравнения: 99 Запишем матрицу Гурвица: [ ], [ ]. Для того, что замкнутая система была устойчива, необходимо и достаточно, чтобы все четыре главных диагональных миноров определителя Гурвица были положительны, при условии a0 > 0. , [ ] [ , ] [ , ] . Таким образом, замкнутая система будет устойчива. Однако малое значение D4 говорит о близости к границе устойчивости. Выполним проверку с использованием языка визуального моделирования (рис. 89). Из рисунка следует, что система устойчива, но близка к границе устойчивости. Рис. 89. Пример устойчивой системы 100 Порядок выполнения работы 1. Реализовать модель системы с управления с пропорциональным регулятором и объектом вида K/((Tp+1)(Tp+1)(Tp+1)). Параметры K и T принять согласно варианту первой лабораторной работы. 2. Подобрать значения коэффициента усиления П регулятора, при которых система: устойчива; находится на границе устойчивости; неустойчива. Для каждого из случае построить частотные характеристики (АЧХ, ФЧХ и АФЧХ) разомкнутой системы. 3. Реализовать модель системы с управления с ПИ регулятором и объектом вида K/((Tp+1)(Tp+1)(Tp+1)). 4. Подобрать значения коэффициента усиления регулятора, при которых система: устойчива; находится на границе устойчивости; неустойчива. Для каждого из случае построить частотные характеристики (АЧХ, ФЧХ и АФЧХ) разомкнутой системы. 5. Оценить устойчивость системы методом Гурвица для устойчивой системы с ПИ регулятором. Вопросы для контроля знаний 1. Сформулируйте понятие устойчивости типа «вход-выход». 2. Сформулируйте понятие внутренней устойчивости по Ляпунову. 3. Что такое характеристическое уравнение и как оно связано с оценкой устойчивости? 4. Сформулируйте критерий устойчивости Найквиста. 5. Сформулируйте критерий устойчивости Гурвица. 6. Поясните графически понятие устойчивости по амплитуде и по фазе. 7. Чем отличаются асимптотическая устойчивость и устойчивость нейтрального типа? 101