UNIVER
О.П. Н о в о ж и л о в
Электротехника
и электроника
Д опущ ено М инобрнауки Р осси й ск ой Ф едерации
в качестве у чебн и ка для ст удент ов
вы сш их у ч ебн ы х заведений,
обучаю щ ихся по направлениям п одгот овки
230100 (6 5 4 6 0 0 ) «И нф орм ат ика
и вычислительная т ехника»
МОСКВА
ГАРД АРИ КИ
2008
У Д К 621.3(075.8 )+ 6 2 1.38(075.8)
ББК 31.2я73+32.85я73
Н74
Рецензенты:
доктор технических наук, профессор М. В. Немцов',
доктор технических наук, профессор В. И. Нефедов
Н74
Н о в о ж и ло в , О. П.
Электротехника и электроника : учебник / О. П. Новож илов. —
М . : Гардарики, 2008. — 653 с . : ил.
IS B N 978-5-8297-0340-0 (в пер.)
И зл а га ю тся б а зо в ы е в о п р о с ы тео р и и л и н ей н ы х и н е л и н е й н ы х ц еп ей , основы
п о л у п р о в о д н и к о в о й эл е к тр о н и к и и о бщ и е п ри н ц и п ы п о ст р о е н и я р а зл и ч н ы х ф ун к­
ц и о н ал ь н ы х у зл о в а н а л о го в о й , и м п у л ь сн о й и ц и ф р о в о й э л ек тр о н и к и . П редставл ен ­
н ы й м а тер и а л в р а вн о й м е р е о т р а ж а е т о бе части д и сц и п л и н ы «Э л ек тр о те х н и к а и
эл ек тр о н и к а» с у ч е т о м с о в р е м е н н ы х тен д ен ц и й р а зв и т и я тех н и ч е ск и х сред ств и
ш и р о к о го и с п о л ь зо в ан и я в ы ч и сл и т ел ь н о й тех н и ки п р и и х п р о ек ти р о ван и и и р азр а­
б о т к е . В у ч е б н и к в к л ю ч е н ы н о вы е н ау ч н ы е р е зу л ьт а т ы , п о л у ч ен н ы е автором и
о п у б л и к о в ан н ы е в ж у р н а л а х « Э л ек тр о те х н и к а » , « Р а д и о т ех н и к а и эл ек трон и к а»,
« Р а д и о т е х н и к а » и др . К н и м о т н о с и тс я м атер и ал , к а с аю щ и й ся во п р о со в теори и н е­
л и н е й н ы х ц еп ей (м е т о д ы и д ен т и ф и к а ц и и , р е ак ти вн ы е м н о го п о л ю сн и к и , прин ци п
о б р а т и м о с т и ), а т а к ж е п о п р ед л о ж е н н ы м авто р о м си н т ези р о в ан н ы м н ел и н ей н ы м
р е ак ти в н ы м эл е м е н т а м и их п р и м е н ен и ю . О б с у ж д аю тс я во зм о ж н о сти и п риведен ы
п р и м е р ы и сп о л ь зо в а н и я п ак е т о в п р о гр а м м сх ем о те х н и ч ес к о го м одел и р о ван и я при
и зу ч е н и и д и сц и п л и н ы .
Д ля студен тов вы сш и х у чебн ы х заведений, обучаю щ ихся по направлениям подго­
товки 230100 (654600) « И нф орм ати ка и вы числительная техника».
УДК 621,3(075.8)+621.38(075.8)
ББК 31.2я73+32.85я73
ISBN 978-5-8297-0340-0
©
©
« Г ард ари ки »,2008
О .П . Н овож илов, 2008
Предисловие
Расш ирение блока гуманитарных и социально-экономических дисцип­
л и н , а также переход м ногих технических вузов на пятилетний срок о б у ­
чения привело к появлению в программах ком плексны х дисциплин и со ­
кращ ению числа часов на их изучение. На изучение такой всеобъ ем лю ­
щ ей дисциплины как «Э лек тротехн ика и электрон ика» отводится в пре­
д е л а х 250— 300 часов, из них ок оло половины часов — на сам остоятель­
н у ю работу. П оэтом у программы этой дисциплины содержат ограничен­
ны й перечень изучаемых вопросов. В частности, весьма скромное место
отводится нелинейным цепям и устройствам, хотя подавляю щ ее б о л ь ­
ш инство узлов электронной аппаратуры работают в нелинейном режиме.
О тм ети м , что в отдельности по электротехнике и электронике имеется
м н ого учебников и учебны х пособий, содержащ их детальное излож ение
осн ов теории цепей и сигналов [4, 6 , 18, 20], аналоговы х и цифровых уст­
ройств [28, 29, 38], которые, как правило, занимают б ольш ой объем.
С другой стороны, в настоящ ее время в распоряжение инженеров пре­
доставлены пакеты программ схем отехнического моделирования и сис­
тем ы сквозного проектирования электронны х устройств. П оэтом у де­
тальн ы е знания по теоретическим вопросам в области электротехники и
электроники требуются, прежде всего, разработчикам таких пакетов, а
разработчики электронной аппаратуры долж ны им еть ф ундаментальные
(ба зов ы е) знания в предметной области и ум еть пользоваться пакетами
программ. Отметим, что и сами пакеты ком пью терного моделирования
долж ны
привлекаться к изучению дисциплины.
Их
использование в
учебн ом процессе облегчает и ускоряет процесс познания.
Указанны е обстоятельства явились главной причиной и сти м улом для
написания данной книги. Ц е л ь
книги
—
представить материал,
который бы в равной мере отражал обе части этой дисциплины с учетом
соврем енны х тенденций развития электротехники и электроники. В кни­
гу вклю чен новый материал, п олучен ны й автором в результате и сслед о­
ваний и опубликованный в ж урналах «Э лек тр о тех н и к а », «Ради отехн ика
и электрон ика», «Р ади отехн и к а» и др.: методы идентификации, реактив­
ные м ногополю сники, принцип обратимости кратного преобразования
частоты, материал по синтезированным нелинейным реактивным элем ен ­
там и их применению.
Книга написана как учебник в соответствии с программой О П Д .Ф .0 2
Электротехника и электроника по направлению подготовки д и п лом и р о­
ванного специалиста 230100 (654600) Информатика и вы числительная
техника с учетом программ по другим направлениям. П ослед н ее обстоя­
тельство вызвано тем, что общая профессиональная дисциплина «Э л е к ­
тротехника и электрон ика» включена в Стандарты по ряду д р у ги х на­
правлений и специальностей (654600, 654300, 654100 и др.). М атериал
излагается с учетом двухступенчатой подготовки специалистов (бака­
лавр — м агистр) и мож ет бы ть полезен аспирантам и преподавателям.
У чебн и к содерж ит 16 глав, разделенны х на пять разделов.
В первом разделе, посвящ енном линейны м цепям, рассматриваются
основные объекты теории цепей, элементны й базис, общ ие сведения о
цепях и принципах их описания, основны е принципы, теоремы и методы
анализа цепей на постоянном токе, при гармоническом воздействии и при
воздействии колебаний слож ной формы.
В о втором разделе представлен материал по нелинейным цепям: рас­
смотрены полупроводниковы е приборы и нелинейные реактивные эле­
менты, вопросы моделирования нелинейны х элементов и цепей, методы
исследования нелинейны х цепей.
В третьем разделе излагается материал, охватывающий ш ирокий круг
вопросов по аналоговой электронике. Рассмотрены общ ие принципы по­
строения и функционирования различны х усилителей (базовы х усили­
тельн ы х каскадов, дифференциальных и операционных уси ли телей , око­
нечных уси ли тельн ы х каскадов), автогенераторов, аналоговы х перемно­
ж ителей, м одулятор ов и детекторов, им пульсны х узлов электрон ной ап­
паратуры, устройств источников электропитания. И злож ение ведется с
учетом влияния интегральной техн ологи и на аналоговую схем отехнику.
В четвертом разделе рассмотрены простейшие устройства цифровой
электроники. И злагаю тся основны е способы описания схем комбинаци­
онны х устройств, принципы составления структурных ф ормул и способы
их минимизации. Рассмотрены принципы построения и функционирова­
ния типовы х комбинационны х устройств и устройств с памятью (тригге­
ров, регистров и счетчиков).
В пятом разделе на примере известного пакета программ DesignLab
рассмотрены особен ности схем отехнического моделирования и разра­
ботки печатны х плат. Освещ ены вопросы автоматизации проектирования
электронны х устройств. О бсуж даю тся возможности и приведены приме­
ры использования пакетов программ схем отехнического моделирования
при изучении дисциплины.
При написании учебника автор с больш им вниманием отнесся к выбору
содержания тем и последовательности их изложения, подбору иллюстратив­
ного материала, примеров по компьютерному моделированию и к структу­
ризации учебника в целом. Д ля лучш его восприятия и понимания сути изла­
гаемых вопросов материал учебника подробно структурирован, использова­
ны текстовые выделения, приведено больш ое количество иллюстраций.
Имеется алфавитный указатель наиболее важных понятий и терминов. Автор
надеется, что приведенный в учебнике материал поможет студентам сфор­
мировать целостное представление об основных концепциях и общ их тен­
денциях развития электротехники и электроники.
В учебнике используется сквозная нумерация глав и локальная нум е­
рация параграфов, ф ормул, рисунков и таблиц. П ри нумерации параграфа
первое число указывает номер главы, второе — порядковый номер пара­
графа в главе. Ф орм улы , рисунки и таблицы внутри параграфа нум еру­
ю тся одиночными числами, а при внешних ссы лках доп олн и тельн о ука­
зывается параграф или спереди проставляется номер главы, затем номер
параграфа. При пользовании алфавитным указателем следует искать с у ­
щ ествительное (а не прилагательное), например, базис элементны й, а не
элементный базис.
А втор
выражает признательность
и благодарн ость
к.т.н. доц енту
М .И . Бочарову за больш ую работу по проведению экспериментальных
исследований синтезированных нелинейны х реактивных элем ентов
устройств на их основе.
и
Аббревиатура
АВХ
ампер-веберная характеристика
АД
ам плитудны й детектор
АЛУ
ариф метическо-логическое устройство
AM
AM
ACM
амплитудная модуляция
АЧХ
амплитудно-частотная характеристика
БНД
безы нерционный нелинейный двухполю сник
ВАХ
вольт-амперная характеристика
ВИП
вторичный источник питания
ВКХ
вольт-кулонная характеристика
ам плитудны й м одулятор
автоматизация схем отехнического моделирования
Г
гетеродин
ГЛИ Н
генератор линейно изменяющ егося напряжения
ГСТ
генератор стабильного тока
д
детектор
ДК
дифференциальный каскад
дц
дифференцирующая цепь
дч
д ели тель частоты
зг
задающ ий генератор
ИЛЭ
интегральны й логический элемент
И НРМ
идеальны й нелинейный реактивный многополю сник
ис
интегральная схема
ИНУН
источник напряжения, управляемый напряжением
ИНУТ
источник напряжения, управляемый током
ИТУН
источник тока, управляемый напряжением
И ТУТ
источник тока, управляемый током
км опл
комплементарная М О П -логи ка
кпд
коэффициент полезн ого действия
КПЧ
кратный преобразователь частоты
кх
колебательная характеристика
ЛКР
линия критического режима
м
м одулятор
НД
нелинейны й двухполю сн ик
МДНФ
минимальная дизъюнктивная нормальная форма
МДС
магнитодвижущая сила
МКНФ
минимальная конъюнктивная нормальная форма
ММС
математическая м од ель схемы
МНЭ
м одель нелинейного элемента
НРД
нелинейный реактивный двухполю сник
НРЭ
нелинейный реактивный элемент
НЧ
нелинейный четы рехполю сник
нэ
нелинейный элем ент
ОБ
общая база
ОК
оконечный каскад
ОК
общ ий коллектор
ООС
отрицательная обратная связь
ОС
обратная связь
ОУ
операционный уси ли тель
ОЭ
о б щ и й эмиттер
ПАС
перемножитель аналоговы х сигналов
П ГК
преобразование параметров гармонических колебаний
ПЛИС
программируемая логическая интегральная схема
по
переходное отверстие
ПЧ
преобразователь частоты
СДНФ
совершенная дизъюнктивная нормальная форма
СКНФ
совершенная конъюнктивная нормальная форма
СН РЭ
синтезированный нелинейный реактивный элем ен т
ТТЛ
транзисторно-транзисторная логика
тс
тестовый сигнал
УВЧ
усили тель высокой частоты
УКДД
управляемый клю ч двухсторон него действия
УНМ
универсальная нелинейная м одель
УПЧ
усили тель промеж уточной частоты
УЧ
умнож итель частоты
УЭ
управляющ ий электрод
ФВ
фазовращатель
ФД
фазовый детектор
ФДН
ф ормула дифференцирования назад
ФЧХ
фазочастотная характеристика
ФМ
фазовая модуляция
ФПЧ
фильтр промеж уточной частоты
ФРВ
функциональный ряд В ольтерра
ФСК
фазосдвигающий контур
х ос
характеристика обратной связи
ЧД
частотный детектор
чм
частотная модуляция
ЭВМ
электронно-вы числительная машина
Раздел 1
ЛИНЕЙНЫЕ ЦЕПИ
1. КОЛЕБАНИЯ, ЭЛЕМЕНТЫ, ЦЕПИ
1.1. Электрические колебания и их представление
Электрические колебания (и сигналы как их частный случ а й ) являются
одним из объектов теории цепей.
К л а с с и ф и к а ц и я к олеба н и й . В теории цепей исп ользую тся различ­
ные виды колебаний. Рассмотрим основны е классификационные призна­
ки колебаний.
С точки зрения а п р и о р н о й
м е т р а х
к о л е б а н и я
и н ф о р м а ц и и
о
п а р а ­
различаю т два вида колебаний:
=> воздейст вие x (t), представляю щ ее собой известную ф ункцию време­
ни, которую можно трактовать как независимую переменную ;
=> отклик y (t), или реакция цепи на известное воздействие. О тклик пред­
ставляет собой неизвестную функцию времени, которая отыскивается
при анализе цепи.
П о
форме
колебания разделяю тся на две больш и е группы:
=> периодические колебания, форма которых повторяется через некото­
р о е минимальное время Т, называемое периодом . Д л я них справедли­
во равенство x T ( t ) = x T (t ± кТ), где к = 1, 2, 3,... Л ю б о е периодическое
колебание слож ной формы мож но представить сум м ой элементарны х
периодических колебаний:
( 1)
* r(/ )= 5 X (0 ;
п
=> апериодические, или непериодические, колебания, которы е не уд о в ле­
творяю т приведенному выше усло в и ю периодичности.
В каждой из этих групп м ож но вы делить:
=> непрерывные колебания, м гновенны е значения которы х изменяются
во времени монотонно (б е з скачков). К ним относится, например,
гармоническое колебание (ко)си н усои д альн ой формы;
=> преры вист ы е, или им пульсны е, колебания, сущ ествую щ ие в пределах
ограниченного интервала времени. Они представляют собой и м п ул ь­
сы прям оугольной, трапецеидальной и другой формы;
По
н а з н а ч е н и ю
можно выделить несколько групп колебаний:
=> колебания, используем ы е как источники энергии для питания различ­
ных потребителей;
=> сигналы, содержащие в себе передаваемое сообщение или информацию о
некотором объекте. Сигналы образуют самостоятельный класс колеба­
ний, который разделяется на отдельные группы, например, детерминиро­
ванные и случайные сигналы; одномерные и многомерные сигналы; ана­
логовые, дискретные и цифровые, управляющие и модулированные сиг­
налы и др. [4]. Самостоятельную группу образуют испытательные сигна­
лы различной формы, предназначенные для тестирования устройств;
=> помехи, которые представляю т собой колебания, меш аю щ ие прини­
мать полезны й сигнал.
Рассмотрим периодические и апериодические колебания, играющ ие
важную р о л ь в теории электрических цепей, и возможные ф ормы их
представления.
Г а р м о н и ч е с к и е к о л еб а н и я . А н а л и т и ч е с к о е
описание.
Среди элементарны х периодических колебаний ф ундаментальную роль
играют колебания, описываемые косинусоидальными (и л и син усоид аль­
ны м и) функциями (рис. 1 ,а)\
(2 )
x „(t) = Х „ cos(n Q .1 - Ф „) = Х с„ cos n Q t + X s„ sin nQ.t,
где X„, Ф „ — ам плитуда и начальная фаза (при / = 0) колебания с частотой
« Q ; £2 = 2л/7"; Х с„ = Х„ собФ „; X sn = Х„ sin®„.
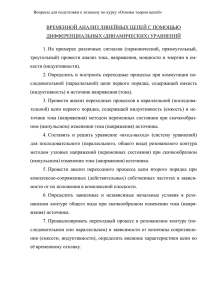
На рис. 1,а представлена форма гармонического колебания (2 ) для
случая п — 1 .
С п е к т р а л ь н о е
п р е д с т а в л е н и е .
Как с л ед у ет из выра­
жения ( 2 ), при заданной частоте nQ, гармоническое колебание полн остью
характеризуется ам плитудой Х„ и фазой Ф„. П оэтом у возмож но спек­
тральное представление колебаний в виде зависимостей ам плитуда—час­
тота (рис. 1 ,6 ) и фаза-частота (р и с .1, в).
П р о е к ц и о н н о е
ния.
и
к о м п л е к с н о е
п р е д с т а в л е ­
Е сли в декартовой системе координат разместить вектор длиной
Х „ с углов ы м полож ением - Ф „ , а затем вращать его с у гл о в о й частотой
(ск о р о сть ю ) п Q. (рис. 1,г), то проекция вектора на ось абсцисс буд ет опи­
сываться выражением (2). Э то свидетельствует о возможности представ-
s
<
б)
nQ
Ф/7
nQ
;
(0
(о
Рис. 1. Формы представления гармонического колебания:
а)
графическая; б) спектральная в виде амплитуда-частота;
в) спектральная в виде фаза-частота; г ) в виде проекции вращающегося вектора;
д) комплексная форма
ления гармонического колебания с помощ ью двух вращающихся векторов
на комплексной плоскости и получения его аналитического описания.
Для обоснования такой возможности восп ользуем ся выражением
(3 )
cos а = 0,5[ехру'а + е х р (-^ а )],
полученны м на основании известной ф ормулы Эйлера, которая описыва­
ет единичный вектор на ком плексной плоскости:
(4 )
ехр j a = cos a + j sin a .
Учитывая (3), запишем (2 ) в виде п олусум м ы д в ух векторов
(5 )
где
x „(t) = 0,5 [ Х п cxp(JnQ t) + X '„ e x p (-jn Q .t)],
X п = Х„ ехр(-/Ф „) —
комплексная ам плитуда;
Х 'п = Х п ехр(+/Ф „) —
комплексно сопряженная амплитуда.
На рис. 1,д показаны начальное полож ение векторов ( Х п , Х 'п) и на­
правление их вращения, которое задают м нож ители ехр(±/л£2/) (5 ). С у м ­
ма проекций векторов на мним ую ось дает нуль. П олусум м а проекций на
вещ ественную ось равна Х„ cos Ф„. Следовательно, закон изменения про­
екций р езульти рую щ его вектора описывается выражением (5).
Ф у н д а м е н т а л ь н ы е
с в о й с т в а
га р м о н и ч е с к и х
коле­
баний:
=> при м ногократном дифференцировании и интегрировании колебания
сохраняют форм у (изменяю тся лиш ь амплитуда и начальная фаза):
d kx n{ t )
(6 )
■со* X„cos(co/ - Ф „ + кя / 2);
dt
f... \xA t)d t = —-r-^fncos(co/—Ф „ - к п / 2 ), где со = пО..
i—
-------■ со
гармонические колебания представляют собой ортогональные функции.
Свойство ортогональности выражается следующими соотношениями:
+ Г /2
jcos т Ш
sin n Q t dt = О при л ю б ы х те и и,
-Г/2
+77 2
(7 )
Jcos mQ.t cos n Q t dt
О при m ± n;
=
- T 12
+77 2
T / 2 при m = n,
О при m ± n \
Jsin m Q t sin nQ.t dt ■
-7 7 2
T /2 при m - n .
И ск лю чи тельн ое место, которое занимают гармонические колебания в
электротехнике и электронике, обуслов лен о:
=> прост от ой генерирования гармонических колебаний, что предопре­
д ел и ло ш ирокое их использование в качестве источников энергии;
=> неизм енност ью формы гармонических колебаний при прохождении
через цепи, описываемы е линейны ми дифференциальными уравне­
ниями. Благодаря этом у свойству гармонические колебания ш ироко
и сп ользую тся д ля тестирования электронны х устройств;
=> минимальной полосой част от , занимаемой гармоническими к олеба ­
ниями, что позволяет использовать их в качестве средства доставки
информации п о различным каналам связи;
=> свойст вом орт огональност и, благодаря которому гармонические ко­
лебания исп ользую тся для представления периодических колебаний
слож н ой формы в виде ряда Ф у р ь е ( 8 ).
Р я д ы Ф у р ь е . П ериодические колебания X j ( t ) слож ной формы, им ею ­
щ ие на интервале [—772__+772] конечное число минимумов, максимумов
и разрывов первого рода (скачков), м ож но представить следую щ и м три­
гонометрическим рядом Ф урье:
(8)
x T{t) = 0,5 Х 0 + f X „ c o s
1
+
>
где
2 +т/2
(9 )
Х ся = —
2 772
|х7 ( t ) cos n Q t dt (n = 0);
X sn = —
7 ” -7 7 2
^
j x T ( t ) sin n Q t d t .
-7 7 2
Коэффициенты X cn и X s„ (9 ) получен ы путем умнож ения обеи х частей
выражения ( 8 ) на cos mQ.t и sin m Q t и п ослед ую щ его интегрирования с
учетом (7).
П р а к т и ч е с к а я
з н а ч и м о с т ь
ряда
Ф у р ь е
состоит
в следую щ ем :
=> соотношения
(9 ) дают ответ на вопрос, как выбирать коэффициенты
Х с„ и X s„ при замене периодической функции х т(t ) три гоном етриче­
ским рядом ( 8 );
=> непрерывное (без скачков) периодическое колебание хт ( 0 может быть с
лю бой степенью точности представлено тригонометрическим полиномом
путем выбора максимального значения п. Это свойство свидетельствует
о практической возможности применения ряда Фурье, поскольку все ре­
альные колебания являются непрерывными функциями времени.
Д ля спектрального представления запишем ряд Ф ур ье в виде сум мы
гармонических колебаний с кратными частотами, или гарм оник:
(10 )
где
х г (0 = 0,5 АЬ + Х ^ „ с о 5 ( и О / - Ф я) ,
П=1
Х „ = ijx * „ + X 2
sn ;
arctg Ф „ = X s„/Xc„; Х„, Ф „ — амплитуда и началь­
ная фаза п-й гармоники.
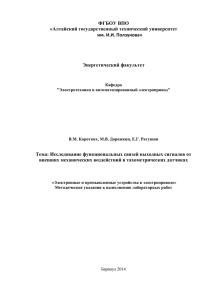
С овокупность амплитуд {Х п} о бразует ам плитудны й спектр, а сов о­
купность фаз { Ф „ } — фазовый спектр периодического колебания. П ри
графическом изображении спектры
представляю т в виде дискретны х
функций Х„{ш ), Ф„(со), где со = nQ. — текущ ая частота (рис. 2). И з теории
рядов Ф ур ье известно, что закон изменения огибаю щ ей ам плитудного
спектра Д и) определяется степенью непреры вности функции x i{ t ) и ее
производных. Д ля функции x-jit) с разрывами первого рода (скачкам и)
огибающая спектра изменяется по закону
Мп. Е сли разрыв имеет
первая производная dx-j(t)/dt, то f i n ) = 1/и2 и т.д. Ф ункция x-j{t), имею щ ая
бесчисленное количество производных, вырождается в гарм оническое
колебание Х\ cos(Q/ - Ф 1). Отметим, что ширина ам плитуд ного спектра
Дсо = («макс - nmH)Q. представляет собой полосу частот, в пределах кото­
рой ам плитуды гармоник превышают некоторое заданное значение. Эти­
ми гармониками определяется точность представления периодического
колебания с пом ощ ью тригоном етрического ряда.
Х„
<Я
s
<
а
2а
3 £2
4П
за
4Q
5П
6
П
Ф „
2Q
Q
©
5а
|
6Й
ш
Рис. 2. Спектральное представление периодического колебания
П ри проведении анализа целесообразно пользоваться комплексной
формой ряда Ф урье, которая мож ет быть получена при использовании
соотнош ения (5 ) для п-й гармоники:
(1 1 )
Х„ cos (п Ш - Ф „) = 0,5 X п ехр jn Q t + 0,5 Х _ п e x p (-jn Q t),
где Х „ = Х„ ехр(-/'Фи); Х _„ = Х„ ехр(+/Ф „)
Подставив (1 1 ) в (1 0 ), получи м
(1 2 )
хтО) = 0,5 Х 0 + 0,5 ^ Х п ехр jn Q t + 0,5
п=1
п=1
ехр(-jn Q t ).
П ерепиш ем (1 2 ) в виде ком плексного ряда
(1 3 )
(1 4 )
x T( t ) = 0,5
Х „= —
ехр jn Q t , где
j x T( j ) e x p ( - j n Q t ) d t .
Д ля получения коэффициентов Х п комплексного ряда Ф ур ье (13 ) ис­
п ользо валось свойство ортогональности экспоненциальных функций:
+тп
+г/2
[О п р и т р и ,
je x p jm L lt ехр j n Q t dt Jexp j ( m + n )Q t dt =
T при m = n.
А п е р и о д и ч е с к и е к олеба н и я . Непериодическое колебани е х(/) можно
рассматривать как предельный случай периодического колебания x j(t )
при Т —> оо; т.е. x ( t ) = lim х т(/ ).
г-»»
Осуществим предельный переход для выражения (14), переписав его в виде
(1 5 )
A X (jw i) = l i m
\xr ( t ) exp (-/со/) d t ,
-7 7 2
где А Х ( /ш) = Х п ',ы = и£2; Да) = Q ; Q = 2п/Т.
П ри Т —> оо частотный интервал между гармониками Дсо —> 0, поэтому:
=> дискретный спектр переходит в непрерывный спектр;
=> значения комплексных амплитуд устремляются к нулю ( А Х ( /оэ) = X п —> 0 ).
П оследнее обстоятельство заставляет при спектральном представлении
апериодических колебаний вместо комплексных амплитуд X п ввести поня­
тие спектральной плотности, выражение которой имеет следую щ ий вид:
(16 )
X (ja > ) =
- ° jx (t ) e x p ( - j c o t ) dt .
Выражение (1 6 ) представляет собой прямое преобразование Ф урье и
позволяет по известной функции х(/) определить спектральную плотность
Д/со) апериодического колебания.
Д л я обратного преобразования Ф ур ье, позволяю щ его по известной
спектральной плотности Д/со) п олучи ть временную ф ункцию апериоди­
ческого колебания х(/), подставим (1 4 ) в (13):
(17 )
00
Дсо
Хт-(/) = 0 , 5 ^ ]
n=—
—
L
71
^
\xT{
\xr ( t ) exp (-/со/)
( - /со/) dt
-7 7 2
exp со/,
J
Осуществим предельный переход для выражения (17), переписав его в виде
+772
(1 8 )
x T( t )
lim X
2я
j x T ( t ) exp (-/со?) dt exp со/ Дсо.
-TI2
П ри Г —> оо внутренний интеграл в (1 8 ) отображ ает спектральную
плотность, а сум ма становится интегралом. В результате предельного
перехода получаем обрат ное преобразование Ф урье:
(1 9 )
х (/) = —
^ Х (у'со) ехру со/ <Ло.
Д л я прямого и обратного преобразований Ф ур ье и сп ользую т другие
формы записи
F [x(t)\ = Д/со);
Г ] [Д/со)] = х (/) или х(/)
Д/со).
С войства
в е н н о й
и
п р еобр азов ан и я
м н и м о й
Ф урье.
С в о й ст в а
ч а с т е й
в е щ е с т ­
с п е к т р а л ь н о й
п л о т ­
н о с т и . И сп ользуя (4), представим спектральную п лотность (1 6 ) в виде
сум мы вещ ественной и м нимой частей:
оо
(20)
ОО
X{j(£>) = j x ( 0 cos Ш dt + j Jx(?) sin Ш dt = Х с(ю ) +/ATs(co).
П одстановкой (2 0 ) в (1 9 ) м ож но показать, что:
вещ ественная часть спектральной плотности является четной функ­
цией, для которой Х с(ю ) = Х с(-со);
=> мнимая часть спектральной плотности представляет собой нечетную
ф ункцию, поэтом у Х 5(со) = - Х 5(-ш ).
П ри проведении анализа электрических цепей в частотной области
н еобходи м о ум еть находить спектр для различных операций над колеба­
ниями (сигн алам и). Эти операции во многом определяю т свойства преоб­
разования Ф урье.
С л о ж е н и е . Преобразование Ф ур ье взвешенной сум мы колебаний
сводится к слож ению взвеш енной спектральной плотности отдельны х
колебаний:
(21)
где
= £ С * В Д ш ),
С* —
весовы е
к о эф ф и ц и ен ты
(п р о и з в о л ь н ы е
вещ ествен ны е
ч и с л а ).
С оотн ош ени е (2 1 ) отражает линейность преобразования Ф у р ь е — од­
но из важ нейш их его свойств.
У м н о ж е н и е .
Спектр при умножении двух колебаний х(/) и y (t)
определяется по следую щ ей ф ормуле:
F [х(/)х></)] = —
| х (т ) у (ш - т )с / т = Д с о )*У (с о ).
__
И н теграл в этой ф орм уле называется сверткой функций x ( f ) и у ( 1).
Д и ф ф е р е н ц и р о в а н и е
и
и н т е г р и р о в а н и е .
Вы­
полнение над колебаниями операций дифференцирования/интегрирования
равносильно умножению/делению спектральной плотности наую:
( 22 )
d x (t)
dt
J x (t ) dx
X (M
j®
М н ож и тели j o i и 1//ю в (2 2 ) называют соответственно оператором
дифференцирования и интегрирования в частотной области.
М а с ш т а б и р о в а н и е
по
в р е м е н и . И зменение масштаба
времени в С раз приводит к изм енению масштаба спектральной п лотн о­
сти в 1/С раз:
F WC01-£ * ( £ ) .
Отметим, что появлениеусо/С обусло в лен о тем, что со = пО. = 2rm.IT.
П р и масштабировании Т умнож ается на 1/С.
С м е щ е н и е
по
в р е м е н и . При прохождении колебаний че­
р ез электрические цепи происходит их смещ ение во времени (запаздыва­
н и е). Спектральная плотность колебания для этого случая определяется
след ую щ и м соотношением:
F [x (t - /0)] = Д/со) ехр (-усо/0).
Так как м од уль мнимой экспоненты |ехр (—/co/о) = 1, то см ещ ение ко­
лебан и я по времени вызывает изменение тольк о его фазового спектра.
О б л а с т ь
п р им е н и м о с т и .
Преобразование
Ф урье
(16 )
справедливо тольк о для колебаний, удовлетворяю щ их услов и ю а бсолю т­
н о й интегрируемости:
+оо
(2 3 )
| x ( t ) |dt < оо .
Э то условие в сильной мере ограничивает класс доп усти м ы х колеба­
ний. Ф о р м уло й (1 6 ) невозможно воспользоваться для вы числения спек­
тральн ой плотности даже гарм онического колебания. Д ля расширения
класса колебаний
используется
математический
аппарат обобщ енны х
функций. В частности, спектральная п лотность гармонических колебаний
выражается через 8 -функции:
F [ c o s Q/] = л [8 (с о - £2) + 8(со + £>)]; F [s in £2/] = - jn [8 (c o - Q . ) - 8(со + Q )].
Д р уго й путь расширения класса исп ользуем ы х для анализа цепей ко­
лебаний, состоящ ий в ведении понятия комплексной частоты, приводит к
преобразованию Лапласа.
П р е о б р а з о в а н и е Л а п л а с а . Ф о р м а л ьн о преобразование Л ап ла са м о ­
ж ет бы ть п олуч ен о путем замены в преобразовании Ф у р ь е (1 6 ) /со на
s = a + у со и ограничением п р еделов интегрирования врем енной о б л а ­
ст ь ю O ...+оо;
-Н»
+оо
(2 4 )
! [ * ( / ) ] = Д .? ) =
Jx(/)exp ( - a t ) ехр (-/со/) dt = Jjc(/)exp ( - s t ) d t ,
О
где a > О, поэтом у долж но быть / > 0 .
о
П оскольку исходное колебание x (t) деформируется затухающим множи­
телем ехр (-Ш ), условие интегрируемости (24 ) принимает вид:
(2 5 )
-И»
])х (0 е х р (- Ш )| Л < ° ° ,
о
т.е. колебание долж но иметь не б о лее чем экспоненциальную степень
роста при t > 0 .
О братное преобразование Лап ласа имеет вид
1 «+./“
(2 6 )
£“ ' № ) ] = x (t ) = ----- p f ( s ) exp.Vг d s .
In jJ jКолебание x (t) называется оригиналом, функция X (s ) — изображением.
Д ля вы числения интегралов вида (2 6 ) использую т теорию вычетов. На
практике ш ирокое применение находят таблицы, содержащ ие изображе­
ния для наиболее распространенной формы колебаний.
П риведенны е выше свойства преобразования Ф ур ье распространяют­
ся и на преобразование Лапласа.
1.2. Элементный базис теории электрических цепей
Т ео р и я электри чески х цепей им еет д ел о с м од елям и элек тр ом агн и т­
ны х и элек тр он н ы х устр о й ств , содерж ащ их резисторы , конденсаторы ,
катуш ки ин дуктивн ости , трансф орматоры , транзисторы , м икросхем ы
и д р у ги е ком пон енты . Д л я построени я м од ели соста в ля ю т ся схема
зам ещ ения, и ли эквивалентная схем а, устройства и ее м атем атическое
опи сани е. П ри м атем атическом м оделировании и с п о л ь зу ю т с я идеали­
зированны е элем ен ты , отобр аж аю щ и е основны е свойства их р еальн ы х
ан а логов. П о лн ы й набор и сп о л ь зу е м ы х идеализированны х элем ен тов
со ста в ля ет элем ент ный б а зи с, вклю чаю щ ий в себя пассивны е ком по­
ненты и источни ки энер гии (к олеба н и й , си гн алов ).
С о в о к у п н о ст ь оп ­
р ед елен н ы м образом соед и н ен н ы х элем ентов называется цепью . И с ­
п о л ь зу е м ы й в теори и эл ек тр и ч еск и х цепей элем ен тн ы й бази с состоит
из ид еали зи р ован н ы х д в у х п о лю сн и к о в . Даж е такие м н о го п о л ю сн ы е (с
б о л ь ш и м ч и слом вы в од ов ) к ом пон енты устройств, как тран сф орм ато­
ры и тран зисторы , м о д е л и р у ю т с я с пом ощ ью д в у х п о л ю сн и к о в . П реж ­
де чем пр и ступ и ть к и зло ж ен и ю материала по э л е м е н т н о м у базису,
рассм отри м элек тр и ческ и е величи ны , и сп ользуем ы е при м атем атиче­
ском опи сани и бази сн ы х элем ен тов .
Э ле к т р и ч е с к и е в е л и ч и н ы . И х природа изучается в курсах физики.
П оэтом у ограничимся краткими сведениями о б электрических величи­
нах. К основным электрическим величинам относятся ток и напряжение,
так как через эти величины выражаются все характеристики и параметры
реальны х устройств.
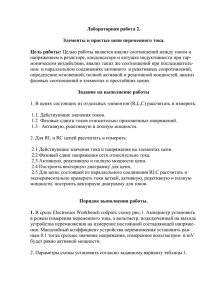
Э л е к т р и ч е с к и й
ток
i(t ) можно представить как упорядо­
ченное направленное движение зарядов, например электронов, прош ед­
ших через поперечное сечение проводника в единицу времени (рис. 1 ,а):
(i)
i= lu n * i = ?k
А'^ ° At
dt
Н а п р я ж е н и е
u (t) можно представить двумя способами:
=> как изменение энергии A w при переносе элем ентарного заряда Дq в
проводящих компонентах (средах);
..
Aw
dw
и = h m ---- = — ;
Aq
dq
(2)
=> как скорость изменения потокосцепления \]/(/), создаваемого в маг­
нитных компонентах (средах):
и = lim
д'^ ° At
dt
6
)
a)
Рис. 1. Понятие тока и напряжения
Если некоторый участок цепи представить в виде двухполю сника, то
ток ассоциируется с движением зарядов через его полю са, а напряжение
с разностью потенциалов на полю сах (рис. 1,б ). Д ве други е вели­
чины — з а р я д
q (t ) и
п о т о к о с ц е п л е н и е
\|/(?) — связаны с
током и напряжением с пом ощ ью соотнош ений ( 1 ) и ( 3 ).
Энергия,
затрачиваемая на перемещ ение заряда q в д в у хп олю с­
нике (рис. 1,6 ) с напряжением и, мож ет бы ть представлена на основании
( 2 ) и ( 1) как функция времени:
Ч
I
(4 )
w = ju dq = j u i d t .
о
Нижний предел интегрирования t0 =
(математический прием) со о т ­
ветствует начальном у состоянию, для которого энергия равна нулю .
М о щ н о с т ь
является важной электрической величиной, которая
характеризует скорость изменения энергии во времени:
( 5)
(6)
dw
p = — = u i.
dt
О пределим м ощ ность гармонических колебаний
u = U m cos (со? - Ф и)\ i = L cos (cot - Ф ,)
как средню ю энергию за период Т:
1 т
(7 )
Р А = — \Umc o s ( Ш - Ф u ) x I mc o s { Ш - Ф I ) d t = 0 ,5 U mI mcosц>,
Т о
где U m, Ф ц, 1 т, Ф/ — соответственно амплитуда и начальная фаза напря­
жения и тока; со = 2я/7’; ср = |Фу - Ф/|.
М ощ н ость Р А называется активной мощ ностью . Для гармонических
колебаний в теории цепей вводятся понятия:
=> реакт ивной м ощ ности:
(8)
P Q = 0,5 U m I m sin ср;
полной м ощ ности:
(9 )
Ps= p l + P g
•
В се приведенные выше электрические величины (за исклю чением
полн ой м ощ ности Р$) являются скалярными (алгебраическими) величи­
нами, которые м огут принимать полож ительны е (+ ) или отрицательные
(—) значения. П олож ительны й знак величины соответствует пассивным
двухполю сникам , потребляю щ им энергию (и ли м ощ ность), отрицатель­
ный — активным двухполю сникам , с пом ощ ью которых м оделирую тся
источники энергии. П ри проведении анализа знак тока и напряжения за­
дается произвольны м образом и помечается на схеме стрелкой, при этом.
=> п олож и тельн ом у значению (направлению ) тока соответствует движе­
ние электронов навстречу стрелке;
=> п олож и тельн ом у значению (направлению ) напряжения соответствует
полярность, показанная на рис.
, :
1 6
=> отрицательны е значения, получен ны е в результате анализа, соответ­
ствую т пр отивополож ном у направлению протекания тока и противо­
полож ной полярности напряжения.
П а с с и в н ы е д в у х п о л ю с н и к и . Элементны й базис теории линейны х
цепей вклю чает три типа пассивных двухполюсников: диссипативные,
или резистивные, емкостные и индуктивные (рис. 2,а,б,в). Характери­
стики двухполю сников являются линейны ми функциями (рис.
2
,г ), кото­
рые можно представить в общ ем виде
(1 0 )
у = К х,
где х — независимая переменная, или воздействие; у — зависимая пере­
менная, или отклик (реакция) двухполю сника; К = const.
Рис. 2. Пассивные двухполюсники: а) резистивный; б) емкостный;
в) индуктивный; г) характеристика двухполюсника
Соотнош ение (1 0 ) символизирует з а к о н
О м а , справедливый для
линейны х цепей, а коэффициент К , связывающий отклик с воздействием,
является по своей сути передаточной функцией ( К = у/х).
Рассмотрим основные особенности типовы х двухполю сников.
Д и с с и п а т и в н ы е
д в у х п о л ю с н и к и . Д ля описания ди с­
сипативных двухполю сников используется пара величин ток—напряжение
(/<->«). Обозначением « <-» » показано, что лю бая из двух величин может
бы ть выбрана в качестве отклика у или воздействия х, что сви детельству­
ет о двух разновидностях типовых двухполю сников:
( 11)
i= G и
или
и = R i,
где G — проводимость; R — сопротивление.
Отметим, что для нелинейных двухполю сн иков выбор отклика и воз­
действия определяет две разные формы характеристик у (х ) и х (у ). Д ля
линейны х двухполю сников такой вы бор хотя и является необходим ы м в
некоторых случаях, но не играет принципиальной роли.
Диссипативные двухполю сники отражают ли н ейную связь меж ду на­
пряжением и и током i. Они исп ользую тся в м оделях компонентов (р ези ­
сторов, диодов, транзисторов), которые п отребляю т энергию (dissipa­
tio n — рассеяние). В соответствии с (1 1 ) проводимость G и сопр отивле­
ние R связаны соотнош ением G = HR. П оэтом у м гновенную м ощ ность (5 )
можно записать в виде
(1 2 )
р = и -i = Gu 2 = R i2.
И з (1 2 ) следует, что в л ю б о й момент времени значение мощности
больш е нуля, поэтом у диссипативный двухполю сник рассеивает посту­
п аю щ ую на него м ощ ность в виде тепла.
О пределим м ощ ность диссипативного двухполю сника при гармони­
ческих колебаниях ( 6 ). И з (1 1 ) следует, что напряжение совпадает по фа­
зе с током ( 6 ), т.е. Ф у = Ф/. П оэтом у <р = |Фу — Ф/| = 0, cos ср = 1 и, как сле­
д ует из (7 ), активная м ощ ность Р А = 0,5 U m1т , а реактивная — Р д = 0 ( 8 ).
Н а рис. 3,а показан закон изменения мгновенной мощ ности
р = u (t) i(0 = 0,5 U m I m sin2(co/ - Ф ) = 0,5 U m /„[1 - sin
2
(Ш - Ф )]
для случая Ф = Ф и = Ф/ = 0.
И з рис. 3,а видно, что активная мощ ность Р А представляет собой у с ­
р едненную за период энергию и определяется высотой 0,5 U m /„, прямо­
угольн и ка с основанием
Т, площ адь которого равна заштрихованной
площ ади под функцией p (t).
Е м к о с т н ы е
д в у х п о л ю с н и к и .
Эти двухполю сники от­
ражают линейную связь м еж ду зарядом q и напряжением и:
(1 3 )
q = C u и л и м = CT'q,
где С — емкость.
И спользуя (13), найдем для емкостного двухполю сника связь между
током и напряжением:
(И )
V
=
dt
или
dt
и = С~' \ id t.
J
И з (1 4 ) следует, что при воздействии гармонического напряжения
u (t) = U cos (Ш - Ф ) ток / = соC U cos (со? - Ф + п/2), т.е. ток опережает на­
пряжение на я/2 .
Рис. 3. Мгновенная мощ ность активных (о ) и реактивных (5 ) двухполюсников
М гновенная мощность (5 ) для ем костного двухполю сника
(1 5 )
р = ш = С li­
cit
м ож ет принимать как полож ительное, так и отрицательное значение. При
р > 0 м ощ ность поступает в емкостны й двухполю сник, т.е. двухполю сник
накапливает энергию, а при р < 0 — отдает ее во внеш ню ю цепь.
И сп ользуя (4 ) и (15), определим энергию нели нейн ого двухполю сника
за время Т с некоторого момента времени t0 (часто принимаю т /0 = - ° ° ):
t0 +T
(1 6 )
w=
u(t0 +T)
jp d t = C
ju d u =
«Оо)
Си'
"('о)
Е сли u (t0) = 0, a u(t 0 + T ) = U m, то накопленная энергия равна w = 0,5
C U т. При периодическом напряжении двухполю сн ик не накапливает
энергии ( w = 0), так как м(/0) = u (to+ T ), поэтому активная м ощ ность равна
н ул ю (рис. 3,6).
Д ля пояснения способности емкостных двухполюсников консервировать
энергию воспользуемся рис. 4. Если к двухполюснику С от источника Е под­
вести постоянное напряжение и = Uq (рис. 4,а), то в соответствии с кулонвольтной
характеристикой
на двухполюснике
установится
заряд q = Q n
(рис. 4,6). Так как Q 0 = const, ток в цепи i = dq/dt = 0. Поэтому при размыкании
ключа состояние двухполюсника С не изменится, т.е. на нем по-прежнему
сохранится и = Ц ,и q = Q0. Это свойство емкостных двухполюсников исполь­
зуется в цифровых системах при построении оперативной памяти.
■с^уо
ч = Qo
а)
Рис. 4. Способность емкостного (а,б) и индуктивного (в,г) двухполюсников
хранить энергию (напряжение или ток)
Н елинейны е емкостные двухполю сн ики служ ат для моделирования
конденсаторов и емкостных свойств полупроводниковы х приборов.
И н д у к т и в н ы е
д в у х п о л ю с н и к и .
В этих д в ухп олю сн и ­
ках сущ ествует линейная связь м еж ду потокосцеплением V)/ и током /:
(17 )
\|i = L i илиг=1~'1|/,
где L — индуктивность.
На основании (1 7 ) получаем связь между напряжением и током :
(18 )
и = — = L —
dt
dt
или
i = L~x f udt.
Из (1 8 ) следует, что при воздействии тока i(t ) = I cos (Ш - Ф ), напря­
жение и = соL I cos (Ш - Ф + л/2), т. е. напряжение опережает ток на п/2.
М гновенная м ощ ность (5 ) для индуктивного двухполю сника
(1 9 )
p = iu -L i—
dt
может принимать как полож ительное, так и отрицательное значение. При
р > 0 м ощ н ость поступает в индуктивный двухполюсник, т.е. д в у х п о лю с­
ник накапливает энергию, а при р < 0 — отдает ее во внеш нюю цепь.
И сп ользуя (4 ) и (19 ), определим энергию нелинейного двухполю сника
L за время Т с некоторого момента времени to (часто принимают to = - ° ° ):
10 + Т
(2.0)
w=
Ш о+Т)
Jр dt = L
lo
£ . 2
'( '0 + Г >
p d i = —^~
К'о)
*('o)
Е сли i(t 0) = 0, i(to + T ) = I m, то накопленная энергия равна w = 0,5 L 1 2m.
При периодическом напряжении двухполю сник не накапливает энергии
(■w = 0), так как i(t0) = i(t 0 + T ), поэтом у активная м ощ ность равна нулю
(рис. 3,6).
Поясним
способность
индуктивных
двухполюсников
консервировать
энергию. Если к двухполюснику L от источника J подвести постоянный ток
i = /о (рис. 4,б?), то в соответствии с ампер-веберной характеристикой (рис. 4,г)
на двухполюснике установится потокосцепление \|/ = 'Ро- Так как Ч'о = const,
напряжение на двухполюснике и = cbif/dt = 0. Поэтому можно замкнуть ключ
К , после чего состояние двухполюсника L не изменится, т. е. он по-прежнему
будет сохранять ток i = /ои потокосцепление \|/ = 4 V
Индуктивные двухполюсники используются для моделирования катушек
индуктивности, трансформаторов и других электромагнитных устройств.
И с т о ч н и к и . В отличие от рассмотренны х пассивных двухполю сников
к источникам относят активные элементы, питающие цепи электриче­
ской энергией. Создаваемые источниками напряжения и токи использую т
при анализе цепей в качестве независимых переменных (воздействия).
Рассм отрим два основны х вида источников: источники напряжения и
источники тока.
Н е з а в и с и м ы е
и с т о ч н и к и
напряжения.
И деаль­
ным источником напряжения называют активный двухполю сник, напря­
ж ение и на полю сах которого не зависит от сопротивления R подключен­
ной внешней цепи (нагрузки), или от протекаю щ его через его п олю са
тока i (рис. 5,а). П оэтом у напряжение и является независимой перемен­
ной. Важнейшей характеристикой источника напряжения является элек­
тродвижущая сила (Э Д С ), которая может бы ть переменной e (t) или п о­
стоянной Е величиной. Стрелками на рис. 5,а в указаны направления
Э Д С , напряжения на полю сах и тока в нагрузке R. И деальный источник
постоянного напряжения мож но представить в виде двухполю сника с
вольт-амперной характеристикой, изображенной на рис.
, .
5 6
i= j
(£ )(- * )
|н = е П/г
а)
i(J)
б)
ф
\и
в)
Рис. 5. Идеальные независимые источники напряжения (а, 6) и тока (в, г)
Н е з а в и с и м ы е
и с т о ч н и к и
тока.
Идеальным источни­
ком тока j называют активный двухполюсник, создающий во внешней цепи
ток / = j , который не зависит от проводимости G подключенной в качестве
нагрузки (рис. 5,в), или от напряжения и на полю сах источника. П оэтому ток
j источника является независимой переменной. Стрелками на рис. 5,в указа­
ны направления напряжения на полюсах и тока в нагрузке (внешней цепи).
Идеальный источник постоянного тока можно представить в виде двухпо­
люсника с ампервольтной характеристикой, изображенной на рис.
5
,г.
Идеальные источники напряжения и тока способны обеспечить бес­
конечно больш ую мощность. Отметим, что для моделирования активных
четы рехполю сников использую тся управляемые источники, которые рас­
сматриваются в параграфе 3 .2 .
О
м од ели р ов ан и и р е а л ь н ы х эл ем ен то в . Рассм отренны е д в у х п о лю с­
ники, входящие в состав элем ен тного базиса теории лин ейны х цепей,
отражают лиш ь одно из м ногих свойств реальны х компонентов. Покажем
на простейших примерах, как мож но учитывать свойства реальны х э л е ­
м ентов при их моделировании.
Р е а к т и в н ы е
э л е м е н т ы . Емкостные и индуктивные двухпо­
люсники учитывают только накопительные свойства реальных реактивных
элементов. Д ля учета потерь в конденсаторах и катушках индуктивности в
их схемы замещения вводят диссипативный (резистивный) двухполюсник.
Н а высоких частотах в конденсаторах начинает сказываться индуктивность
28
выводов, а в катушках индуктивности — межвитковая емкость и емкость
выводов. Эти факторы учитываются введением в схемы замещения реактив­
ных элементов (рис. 6 ,а,б) дополнительных реактивных двухполюсников.
И с т о ч н и к и
н а п р я ж е н и я
и
т о к а . М ощ ность реальны х
источников не м ож ет бы ть бесконечно больш ой. Ограничение м ощ ности
достигается введением в схемы замещения источников диссипативных
двухполю сников, называемых внутренним сопротивлением или п р ово­
димостью , при этом:
=> для источника напряжения (рис.
Е
(2 1 )
/ = —----- — ;
ER
и = ——
6
,е
E 2 R..
p = i-u =
для источника тока (рис. 6 ,г)
( 22 )
J
и= ■
G ..+ G .,
JG.,
J 2GH
i = ■
( G H+ G
G + G
H) 2
Rh
я,,
j
CA
х)
]Сн \ и
G„
г)
Рис. 6. Схемы замещения конденсатора (а), катушки индуктивности (б ),
источника напряжения (в) и источника тока (г)
И з соотнош ений (2 1 ), (2 2 ) следует:
=> введение внутреннего сопротивления R K в источник напряжения по­
зволяет ограничить при коротком замыкании полю сов ( R H = 0 ) ток
значением гк3 = E/R„ (рис. 6 , в), мощ ность — значением р = Е //?„.
=> введение внутренней проводимости G„ в источник тока ограничивает
напряжение на его полю сах при отклю ченной нагрузке ( G H = 0
жим х о л о сто го ход а ) значением мхх= J IG (рис. 6 ,г), мощ ность
ре­
зна­
чением р = J2/G„;
=> из условия d p!dRa = 0 и dp/dGH = 0 находим оптим альную нагрузку
(R » опт = R », G „ опт = С и,) максимальную мощность, отдаваемую источ­
ником во внеш ню ю цепь (р„ макс = 0,25 E 2 /R„,p нмакс
0,25J /С/и).
П р и н ц и п д у а л ь н о с т и . Терм ин дуальны й (dual) означает двойствен­
ный. Два объекта будем называть дуальными объектами, если для их
описания сущ ествует набор взаимозаменяемых величин, позволяю щ ий
подменить описание одного объекта описанием другого. При этом взаи­
мозаменяемые величины называются дуальными величинами. В се д у а л ь­
ные пары двухполю сников и электрических величин приведены на рис. 7 .
Д уальную пару составляют диссипативные двухполюсники с вольтамперной В А Х /(и) и ампер-вольтной А В Х и(/) характеристиками (рис. 7,а).
Стрелками « < - > » показаны дуальные величины. Д ля реактивных двухпо­
люсников возможны четыре варианта дуальных пар (рис.
Диссипативные двухполюсники
, ).
7 6
Емкостные
Индуктивные
двухполюсники
двухполюсники
Дуальные
электрические величины
/ = dq/dt; <-> и = dvf/dt:
q = f i dt; <-> \|/ = /и dt.
«)
Рис. 7. Дуальные двухполюсники (а, б) и электрические величины (в)
Отметим, что в качестве дуальны х объектов можно рассматривать не
тольк о цепи, элементы цепи, но и их математическое описание, напри­
мер, дуальными являются:
=> выражения (1 3 ) и (17);
=> соотношения между величинами на рис.
7
,в.
Принцип дуальности в теории цепей выявляет условия дуальности
цепей: две электрические цепи являются дуальны м и, если закон изм ене­
ния контурных токов в одной из них подобен закону изменения узлов ы х
потенциалов в другой [6 ]. О н позволяет по определенны м правилам пре­
образовать исходную цепь в дуальную . П рим ером дуальны х цепей явля­
ю тся схемы замещения источника напряжения и тока (рис.
6
,в,г).
Принцип дуальности освобож дает от проведения анализа дуальн ы х
цепей и, кроме того, значительно сокращ ает количество изучаемы х о б ъ ­
ектов. Например, достаточно изучить параллельны й колебательн ы й кон­
тур, после чего все его свойства перенести на последовательны й.
1.3. Электрические цепи и их описание
Д ля анализа реальн ого устройства составляется его схема замещения из
базисны х элементов (двухп олю сн иков), рассмотренных в параграфе 1 .2 .
В дальнейш ем под электрической цепью будем понимать совокупность
базисны х элементов, представленных в виде схемы. На схеме отображ а­
ются все элементы цепи и порядок их соединения, указываются направ­
лени я протекающих через них токов и полярность напряжения.
Возмож ны два способа соединения (вклю чения) элементов:
=> параллельное соединение, при котором на элементы действует одно и
то же напряжение;
=> последовательное соединение, при котором через элементы протекает
один и тот же ток.
На рис. 1 и 2 показаны оба способа соединения базовых элементов с
источниками напряжения и тока. Н а примере простейш их схем (рис. 1) в
дальнейш ем рассматриваются основные вопросы и задачи, решаемые в
теории цепей.
Рис. 1. У з е л (а) и контур (б ) электрической цепи
б)
а)
Рис. 2. П араллельное (а) и последовательное (б ) соединения
базисных элементов
В етв ь, у зе л , к он тур . При математическом моделировании электриче­
ской цепи пом им о описания отдельны х ее элементов используется опи­
сание геометрической конфигурации (структуры , топ ологи и ) цепи. К о с ­
новным понятиям, характеризующим структуру цепи, относятся:
=> ветвь, под которой в общ ем случае поним аю т участок цепи с двумя
выводами. В качестве ветви может бы ть выбран как отдельны й э л е ­
мент цепи, так и несколько последовательн о и (и л и ) параллельно со ­
единенных элементов;
=> узел, являю щ ийся точкой соеди нен ия элем ен тов цепи (р и с.
1 ,а ).
Различаю т два вида узлов : устраним ы е и неустраним ы е. У с т р а н и ­
мым узл о м является точка соеди нен ия элем ен то в R и L на рис. 2,6.
У стр ан ен и е у зл о в достигается п утем зам ены неск ольки х п о с л е д о ­
вательно вклю чен н ы х элем ен тов
одн и м
эквивалентны м
двухпо­
лю сн иком ;
=> контур, представляющ ий собой зам кнутую цепь из последовательно
соединенных элементов (рис. 1,6). П ростейш им контуром является
цепь из двух элементов G - С (рис. 2,а).
Законы Кирхгофа. Эти законы используются для структурного (тополо­
гического) описания цепи. На их основе составляют уравнения соединений.
П е р в ы й
закон
К и р х г о ф а
(ветвей), сходящ ихся в узле (рис.
1
связывает
токи
элем ентов
,а):
=> алгебраическая сумма токов в каждом у з л е равна н улю или
=> алгебраическая сумма токов, притекаю щ их к у з л у от источников (ак­
тивных элем ентов), равна сум м е токов, исходящ их из него в пассив­
ные элементы:
N
(!)
U
2 л (/ ) = о
"=1
или
К
£ / „ , ( 0 = £ / * (/ ),
т- 1
Аг=1
где N — общ ее ч и сло элем ен тов, п од к лю ч ен н ы х к у з л у ; М , К — ч и сло
источников Э Д С и ч и сло пассивны х элем ен то в , п од к лю ч ен н ы х к у з л у
( М + К = N ).
Знак тока определяется выбором п олож и тельн ы х направлений токов
ветвей: например токам, выходящ им из узла, услов н о приписывается
знак « + » , а токам, входящим в узел, — знак « - » .
В т о р о й
закон
К и р х г о ф а
связывает напряжения ветвей,
входящ их в контур (рис. 1,6 ):
алгебраическая сумма напряжений на элем ентах (ветвях) контура
равна нулю или
=> сум ма ЭД С, действую щ их в контуре, равна сум м е напряжений на пас­
сивных элементах контура:
(2 )
! > „ ( ') = 0
и ли
и=]
] [ > т (0 = 1 Х ( 0 ,
т =\
£=1
где N — общ ее чи сло элементов в контуре; М , К — число источников
Э Д С и число пассивных элементов в контуре { М + К = N ).
Направление
обхода
контура
при
суммировании
выбирают
про­
извольно. Напряжения и Э Д С , направления которых совпадают с вы­
бранным направлением обхода, берут с одним знаком « + » ; направленные
навстречу о б х о д у — со знаком « - » .
П ри составлении схем замещения реальных устройств соединение
элем ентов не д ол ж н о противоречить законам Кирхгофа и характеристи­
кам самих элементов. Например, н е
д оп у ск ае тс я:
=> параллельное включение независимых источников напряжения, поскольку
они задают напряжение на полюсах цепи, и последовательное включение
независимых источников тока, задающих значение тока в цепи;
=> контур, составленны й тольк о из источников напряжения, и узел, к
которому подклю чены тольк о источники тока;
=> замыкание
накоротко
полю сов
идеального
источника напряжения
(Э Д С ) и размыкание полю сов идеального источника тока, так как ис­
точники наделены бесконечной мощ ностью .
Отметим также, что источник напряжения следует включать последо­
вательно с ветвью цепи, а источник тока — параллельно ей (как на рис. 1).
В противном случае, когда, например, источник тока подключен к п осле­
довательной R C L -цепи на рис. 2,6, проведение анализа теряет смысл, так
как протекающий через отдельны е элементы ток известен.
П о ста н о в к а задачи
а н а ли за. Исходными данными служ ит схема
электрической цепи с известными параметрами ее элементов, включая
источники напряжения и тока (рис. 2). Н еобходи м о найти токи и напря­
жения отдельны х элем ентов цепи (ветвей).
В общей постановке задачи анализа известные напряжения и токи источ­
ников являются функциями возбуждения (воздействиями, сигналами) цепи, а
искомые напряжения и токи ветвей — реакциями (откликами) цепи. Требуется
определить реакции цепи на заданное воздействие (сигнал).
П р и н ц и п ы о п и са н и я цепей. Д ля решения этой задачи необходим о
составить две системы уравнений:
=> уравнения соединений, или т опологические уравнения, которые зави­
сят тольк о от геометрической конфигурации цепи и определяю тся
способам и соединений ее элементов. Эти уравнения устанавливаю т
связи м еж ду токами и напряжениями отдельны х элем ентов, входящ их
в цепь, и составляются на основе двух законов Кирхгофа;
=> ком понент ны е уравнения, связывающие воздействие и отклик каждо­
г о элемента (см. 1.2). Эти уравнения не зависят от схем ы и геом етри­
ческой конфигурации цепи.
С оста в и м
уравнения д ля
п р остей ш и х
ц епей,
и зоб р аж ен н ы х
на
рис. 2 .
П а р а л л е л ь н а я
цепь
(рис. 2,а). На основании закона К и рх­
гофа д л я токов запишем уравнение соединений
(3 )
г'с + ic + iL = j .
Д оп олн и м его компонентными уравнениями
(4 )
ic = G-u; ic = C — ; iL = — \ u d t .
dt
L 1
П о с л е подстановки (4 ) в (3 ) получаем
интегро-диф ференциальное
уравнение с постоянными коэффициентами отн осительно узл о в о го на­
пряжения u (t):
(5 )
G -u + C — + - ( u d t = i .
dt
L 3
Продифференцировав обе части уравнения (5 ) по времени, получим
лин ейное дифференциальное уравнение второго порядка
(6 )
с/2и | G du
d t2
и
_ 1 di
С d t + LC~~C~dt
П о с л е д о в а т е л ь н а я
цепь
(рис. 2,6). Н а основании закона
Кирхгофа для напряжений запишем уравнение соединений
(7 )
u R + ис + uL = е .
Уравнение (7 ) при заданной Э Д С e (t ) содержит три неизвестных uR, ис
и uL, поэтом у его следует дополнить компонентными уравнениями
( 8)
uR = /?•/';
uc = — \i df ,
С 3
u ,= L — .
L
dt
П о с л е подстановки ( 8 ) в (7 ) получаем интегро-диф ференциальное
уравнение
(9)
R i + — \idt + L — = e,
г J
м
'
Продифференцировав обе части уравнения (9 ) по времени, получи м
лин ейное дифференциальное уравнение второго порядка
d 2i
(
}
R_di_
i
1 de
~dtI + ~ L d t + L C ~ L d t '
П олучен н ы е для описания цепей на рис. 2 уравнения (5 ), (9 ) и ( 6 ), (1 0 )
им ею т одинаковую структуру. О ни переходят друг в друга при замене
параметров цепи и переменных на дуальные. Отсю да следует, что п осле­
довательная и параллельная цепи на рис. 2 являются дуальными цепями.
Дифф еренциальные уравнения играют в теории цепей фундаменталь­
ную роль, так как в результате их решения можно получи ть п о лн о е пред­
ставление о б о всех процессах, протекающих в исследуем ой цепи.
К л а с с и ф и к а ц и я цепей. С пом ощ ью электрических цепей м оделиру­
ю тся электротехнические и электронны е устройства. П оэтом у к вопросу
классификации цепей след ует подходить с точки зрения адекватности
отображения реальны х процессов, рассматривая цепи как м одели элек­
трических объектов. Ш ирокое м ногообразие устройств и протекаю щ их в
них процессов породило больш ое количество различных классификаци­
онны х признаков. Рассмотрим основны е признаки.
Р а з м е р ы
и
д л и н а
волны.
С этой точки зрения следует
вы делить два вида цепей:
=> цепи с распределенными параметрами. С их помощ ью моделируются
объекты, геометрические размеры которых сопоставимы с рабочей дли­
ной волны (частотой) или превышают ее. Примером таких объектов яв­
ляю тся длинные линии с распределенными параметрами (R , L , С ), в ко­
торых протекающие процессы имеют волновой характер, т. е. токи и на­
пряжения распространяются вдоль линии в виде волны и поэтому зависят
не только от времени, но и от пространственных координат;
=> цепи с сосредот оченны м и параметрами, предназначенные для моде­
лирования устройств, в которы х (благодаря малым размерам компо­
нен тов) энергия локализована в виде потребляемой активной мощ но­
сти, энергии электрического (конденсаторы) и м агнитного (индуктив­
ные элем ен ты ) полей. Свойства сосредоточенных цепей практически
не зависят от соеди ни тельн ы х проводников, поэтом у их представляют
принципиальны ми схемами и ли графами.
Д альн ейш ее излож ение посвящ ено цепям с сосредот оченны м и пара­
метрами, так как они н аи более широко использую тся при моделирова­
нии электротехнических и электронны х устройств.
О п е р а т о р
цепи.
Как указывалось выше, одна из задач решае­
мых в теории цепей, состоит в определении реакции y (t), или отклика
цепи по известному воздействию x (t). Связь м еж ду откликом и воздейст­
вием может бы ть описана с пом ощ ью оператора цепи К в виде с л ед у ю ­
щ его соотношения: у = К - х. Оператор цепи является важнейшим класси­
фикационным признаком. П о его свойствам происходит разделение це­
пей на линейные и нелинейные, на стационарные и нестационарные.
Д ля линейной цепи выполняются следую щ и е равенства
(1 1 )
К{х\ + х 2) = К х \ + К х2, К ( а х ) = а К х ,
гд е а — некоторое число.
При невыполнении (1 1 ) говорят, что цепь является нелинейной. С оот­
нош ения ( 1 1 ) выражают известный в электротехнике принцип суперпози­
ции (налож ения), который свидетельствует о том, что в линейной цепи
получается одинаковый отклик:
=> если воздействовать на нее сум мой сигналов или каждым сигналом в
отдельности, а затем слож ить результаты;
=> если сначала умнож ить сигнал на константу а , а затем пропустить его
через цепь, или сначала пропустить через цепь, а затем ум нож ить на
константу а.
Примером линейного оператора является оператор дифференцирова­
ния (K = d/dt). Отметим одно важное свойство лин ейны х цепей, выте­
кающее из принципа суперпозиции: линейная цепь не создает гарм они­
ческих колебаний с новыми частотами.
Д ля стационарной цепи оператор обладает следую щ и м свойством:
если y (t) = К x (t), то у(/ ± t 0) = К x (t ± t0) при л ю б о м /0, т.е. отклик не зави­
сит от того, в какой момент времени поступает воздействие. Е сли приве­
денны е условия не выполняются, то цепь является нестационарной.
К нестационарным цепям относятся параметрические цепи с зависящими
от времени параметрами.
Коэффициенты
д иф ф ер е нц иа л ьн о го
уравнения.
Выше выявлена фундаментальная роль дифференциальных уравнений при
описании цепей. Теперь покажем их роль при классификации цепей.
Описание цепи с сосредоточенными параметрами мож ет бы ть пред­
ставлено в виде следую щ его дифф еренциального уравнения:
( 12>
JU
I A
и=о
d”v
—
= F[x(t)]
at
или
N
г !плI
м
И ту
f i b „ - ^ - = f j am- — ,
dt
т=о
at
„ =0
где х = x (t ) — воздействие; у = y (t ) — выходная реакция, или отклик.
Коэффициенты Ь„ дифференциального уравнения выражаются через
параметры компонентов и в сильной мере влияю т на процессы, п р оте­
кающие в цепи, и определяю т ее свойства. Рассмотрим три случая.
1. Постоянные параметры R, L , С компонентов соответствуют дифферен­
циальному уравнению ( 12) с постоянными коэффициентами b„ = const, кото­
рое как оператор цепи удовлетворяет соотношениям (11). П оэтому цепи,
описываемые уравнением ( 1 2 ) с постоянными коэффициентами, относятся к
линейным цепям.
2. Уравнение (12), в котором хотя бы один из коэффициентов b„ = b„{t)
является функцией времени, описывает линейную цепь с переменными па­
раметрами R (t), L (t ) или С (0, или параметрическую цепь. Для такой цепи
принцип суперпозиции остается в силе. Это означает, что выполняются со­
отношения ( 1 1 ) и решение уравнения ( 1 2) является суммой независимых
частных решений. Однако частные решения представляют собой сложные
(негармонические) функции. Поэтому параметрическая цепь (в отличие от
линейной) создает гармонические колебания с новыми частотами. Действи­
тельно, если R (t) = R cos (0 |Г, а воздействие /'(/) = / cos city, то отклик
u (t) = R (t ) i(t ) = 0,5 R I cos (coi +
+ 0,5 R / cos (со, - co2)/ •
В с и л у втор ого соотн ош ен и я в (1 1 ) ам плитуд ы отклика изм еняю тся
п р оп ор ц и он альн о ам п ли туд е / воздействия. О тм етим , что н еп оср ед ст­
венно р еа ли зуем ы е парам етрические цепи (в «ч и с т о м в и д е ») из-за
техн и ч еск и х тр уд н о ст ей не находят практического применения. О д н а ­
ко в ряде сл уч а ев опи сани е цепей, состав лен н ы х из н ели нейн ы х э л е ­
м ентов, сводят к ди ф ф ерен ц иальн ом у уравнению с перем енны м и ко­
эф фициентами b „(t).
3. Уравнение (1 2 ) описывает нелинейную цепь, если хотя бы оди н из
коэффициентов Ь„ = Ь „(х) является нелинейной функцией воздействия
(тока, напряжения, заряда, потокосцепления). Такая цепь содержит ком ­
поненты с нелинейны м и характеристиками, и для нее принцип суп ер п о­
зиции не вы полняется. Ее отклик при воздействии гармонического к о ле­
бания содерж ит новые спектральны е составляющ ие. Действительно, если
и = А г'2, г = / cos со/, то
и = 0,5 А I 2 + 0,5 А / 2 cos 2wt.
К ром е того, ам плитуды отклика напряжения не пропорциональны ам­
пли туде воздействия. М ож н о сказать, что амплитуда воздействия влияет
на структуру спектра отклика: при м алой амплитуде воздействия в спек­
тре отклика остается составляющ ая с частотой воздействия, т.е. нели ней­
ная цепь вырождается в линейную .
В заклю чение отметим, что:
=> основное применение (ф ункции) линейны х цепей — уси лен и е к о ле­
баний и фильтрация;
=> параметрические цепи в «ч и с т о м » виде из-за технических трудностей
реализации не находят практического применения. О днако в ряде
случаев описание цепей, составленны х из нелинейны х элементов,
сводят к дифференциальному уравнению с переменными коэффици­
ентами b„(t);
=> с пом ощ ью нелинейных цепей реализую тся все преобразования си г­
налов, связанные с трансформацией спектра: генерирование колеба­
ний, модуляция, детектирование, преобразование частоты и др.
Т о п о л о г и ч е с к и е
признаки.
Выше была выявлена роль,
которую играет топология, или структура, цепи при составлении уравнений.
Такие признаки, как число узлов и контуров, полностью определяют конфигу­
рацию цепи. К важным топологическим признакам также относится количест­
во полюсов, или внешних выводов цепи. П о этому признаку следует выделить:
=> двухполюсники, к которым относятся цепи с двумя выводами. С помощ ью
двухполюсников моделируются источники и приемники сигналов, на­
пример, микрофон, телефон, приемная и передающая антенны;
=> четырехполюсники, в которых вы делены два входа и два выхода, на­
пример, трансформатор, усили тель. Они вы полняю т функции переда­
точн ого звена;
=> ш естиполюсники,
представляющ ие
собой
передаточные
звенья
с
управляемым коэффициентом передачи.
Ц епь с чи слом полю сов б о лее двух принято называть м н огоп ол ю сн и ­
ком. В теории цепей м ногополю сники исп ользую тся для составления
топологических уравнений исследуем ой цепи, например, уравнений по
методу переменных состояния (см. п. 4.2).
Н а л и ч и е — о т с у т с т в и е
и с т о ч н и к а
энергии.
По
этому признаку различаю т два вида цепей:
=> активная цепь, которая содержит внутренние источники энергии,
в частности усили тель;
=> пассивная цепь, не содержащая внутренних источников энергии, например
цепь, состоящая только из пассивных элементов — резисторов, конденса­
торов, индуктивных катушек (например, феррорезонансный стабилизатор).
В ид
и
п ар а м е т р ы
в о з д е й с т в и я . П ри моделировании
реальных устройств учитываются режимы работы, форма и частоты воз­
действую щ их колебаний. С этой точки зрения вы делим несколько групп
цепей (и л и м оделей):
резистивные цепи п ост оянного тока и цепи перем енного тока, со­
держ ащ ие индуктивности и емкости. Они исп ользую тся соответст­
венно при анализе статических и динамических реж имов исследуем о­
го устройства. В соврем енны х пакетах схем отехнического м оделиро­
вания электронны х устройств перед временным анализом проводится
расчет по постоянном у ток у с целью выбора рабочей точки на харак­
теристике нелинейного элем ента (транзистора);
=>по
•
диапазону
частот
воздействующих колебаний выделяют:
низкочаст от ные, или резистивные, цепи постоянного тока, кото­
рые не учитывают инерционность процессов;
•
вы сокочаст от ны е цепи, которые содержат емкости и индуктивно­
сти и поэтому отражают динамику процессов.
Н есм отря на условность, приведенная классификация является полез­
ной и исп ользуется при теоретических исследованиях цепей.
К р а т к и й обзор м ето д о в ан а ли за . С точки зрения р е з у л ь т а т о в
а н а ли з а
все методы разделяю тся на две больш и е группы:
=> временные методы, при которых составляется и решается дифферен­
циальное
уравнение.
Результатом
решения
являются
временные
функции, отражающие процессы в отдельны х компонентах. Практи­
ческая реализация временных методов связана с проведением трудо­
емких расчетов;
=> част от ны е методы. С точки зрения вычислений они гораздо проще,
так как позволяю т свести вычисления к реш ению алгебраических
уравнений. П рим ером частотного подхода служ и т метод комплексных
ам плитуд. При его использовании результатом анализа являются ам­
пли туды и начальны е фазы отклика.
П о виду в о з д е й с т в и я
можно выделить:
=> методы анализа цепей на пост оянном токе, которые широко исп оль­
зую тся на начальны х этапах для выбора режима электронны х схем в
состоянии покоя;
=> м етоды анализа при гарм онических воздействиях, среди которых ве­
дущ и е позиции занимает упомянуты й выше метод комплексных ам­
пли туд;
=> м етоды при элем ентарны х сигналах импульсной формы. Эти методы
исп ользую тся при исследовании переходных процессов;
=> методы
анализа для сигналов произвольной формы. М етоды этой
группы базирую тся на принципе наложения (суперпозиции), справед­
ли вом для ли н ейны х цепей. Е сли известна реакция цепи на элемен­
тарное воздействие, то реакция на слож ное воздействие выражается в
виде линейной комбинации отдельны х реакций.
В о временном аспекте м ож но выделить два режима работы цепи:
=> переходны й режим, возникающий после подачи воздействую щ их ко­
лебани й на электрическую цепь;
=> стационарный (установивш ийся) режим, который является основным
реж имом работы всех устройств.
Д л я анализа цепей в этих режимах использую тся соответствую щ ие
м етоды . Например, классический метод используется д ля анализа пере­
ход н ы х процессов. Операторный м етод можно использовать для анализа
о б о и х режимов.
А н а ли з цепи можно рассматривать как совокупность отдельны х задач,
позволяю щ их для заданной цепи и известных ее параметрах определить
токи и напряжения ветвей.
П о виду базисных (и ском ы х) переменных можно вы делить следую щ и е
м етоды анализа, отличающ иеся особенностями составления топ ологи че­
ских уравнений:
=> м етод законов Кирхгоф а (и л и токов и напряжений), использую щ ий
д ля составления уравнений оба закона. Неизвестны ми величинами
уравнений являются токи и напряжения;
=> м етод контурных токов, в котором неизвестными топологически х
уравнений являются токи контуров;
=> м етод узловых напряжений, в котором неизвестными величинами при
составлении уравнений выбираются потенциалы узлов , или напряже­
ния узлов относительно базового узла;
=> м етод переменных сост ояния, в котором искомы ми величинами (п е ­
рем енны е состояния) выбираются напряжения на ем костях и токи в
индуктивностях.
П ослед ую щ и й материал посвящ ен излож ению основны х принципов,
теорем и методов анализа, исп ользуем ы х в теории ли н ейны х цепей.
2. ЦЕПИ ПОСТОЯННОГО ТОКА
Анализ цепей постоянного тока, или резистивных цепей, наиболее прост дня
понимания методов, используемых в теории цепей. Для заданной схемы ана­
лиз заключается в составлении компонентных и топологических уравнений и
последующем их решении для требуемых токов и напряжений. Компонентные
уравнения для резистивных цепей имеют простую форму и описываются со­
отношениями, справедливыми как для постоянного, так и для переменного
тока и напряжения: u(t) = R -i(t) или /(/) = G-u(t), где R = 1/G. П оэтому при со­
ставлении уравнений будем пользоваться мгновенными значениями токов и
напряжений (в виде строчных букв i и и), отражая их общий характер.
2.1. Преобразование цепей
Прежде чем приступить к составлению уравнений цепи целесообразно пре­
образовать некоторые ее участки (подцепи, подсхемы) с сохранением
свойств всей цепи. Такое преобразование называется эквивалентным преоб­
разованием. Поясним его сущность, представив исходную подцепь и заме­
щ ающ ую подцепь в виде многополюсников (рис. 1) с равным количеством
пар полюсов. Исходная (рис. 1,а) и замещающая (рис. 1,6) цепи эквиваленты,
если равны напряжения и токи всех одноименных пар полю сов ик„ = и*.3;
4 .и = 4 л при лю бы х режимах работы цепи.
Рассм отрим особен ности преобразования простейших цепей.
П о след о в а тел ьн а я резистивная цепь. Двухполюсная цепь, составлен­
ная из последовательно соединенных резистивных элементов (рис.
2
,а), име­
ет следую щ ие особенности:
=> напряжение на полю сах цепи равно сумме напряжений на отдельных
элементах. П оэтом у в качестве параметра резистивного элемента це­
лесообр азн о принять сопротивление;
=> через все элементы протекает один и тот же ток.
Рис. 1. Сущность эквивалентного преобразования
Д ля последовательной цепи топ ологическое и компонентные уравне­
ния имеют следую щ ий вид:
N
(1 )
и —
ип
R n in .
Л =1
Учитывая, что /| = /2= ... = г„ = г, получаем
(2 )
u = i f iR „ = R - i .
п=\
С ледовательно, цепь на рис. 2,а преобразуется в эквивалентный д в ух­
полю сник (рис. 2,6) с сопротивлением R, равным сум м е всех сопротивлеN
ний
последовательно соединенных элементов.
R,
R,
«I
О*
|[jl
- U & -
/д;_
Un
Un-\
а)
б)
Рис. 2. Преобразование последовательной цепи
Последовательные резистивные цепи часто использую тся в качестве де­
лителей напряжения. Действительно, напряжение на «-элем енте (рис. 2,а )
с учетом ( 1), ( 2 ) можно записать в виде
ип
Ri;' i
( R,/R)u
К.цы,
где К у = и„/и = R J R < 1 представляет собой коэффициент передачи (д е ­
лени я) напряжения.
П а р а л л е л ь н а я р ези сти в н ая цепь. Двухполю сная цепь, составленная
из параллельно соединенны х резистивных элементов (рис. Ъ,а), имеет
следую щ и е особенности:
=> втекающий ток i равен сум м е токов отдельны х элементов. П оэтом у в
качестве параметра резистивного элемента целесообразно принять
проводимость;
=> на все элементы воздействует одно и то же напряжение.
Д ля параллельной цепи топологическое и компонентные уравнения
и м ею т следую щ и й вид:
N
(3 )
г= Х л ;
п=1
h ~ G„u„.
Учитывая, что и \ = и2— . . . = и „ = и получаем
(4 )
i = ujTG„=G-u.
П—
1
С ледовательно, цепь на рис. 3 ,а преобразуется в эквивалентный д в у х ­
полю сник (рис. 3,6) с проводимостью G, равной сум ме всех проводимоN
стей
G n пар аллельно соединенны х элементов.
И=1
i
/
»i l y G\ »2 ||j ] Gi
G„
ид | [ | ]
Рис. 3. Преобразование параллельной цепи
П араллельные резистивные цепи являются делителями тока. Ток, проте­
кающий через л-элем ент (рис. Ъ,а) с учетом (3), (4 ) можно записать в виде
hi
G„-u„
G n'U
( G ,/G ) •/
A./-/,
где К ] = i„/i = G J G < 1 представляет собой коэффициент передачи (д е л е ­
ния) тока.
И з выражений (1 )— (4 ) следует, что параллельная и последовательная
цепи являются дуальны м и цепями.
П о след о в а тель н о -п а р а ллель н о е
со ед и н ен и е.
О собен н ости
п р е­
образования к ом би н и рован н ы х цепей со см еш анны м (п о с л е д о в а т е л ь ­
ным и п а р а л л е л ь н ы м ) соед и н ен и ем резистивны х элем ен тов р а ссм о т­
рим на прим ере схем ы , приведен ной на рис. 4 ,а. Эквивалентная (р е ­
зульти р ую щ а я ) проводи м ость G i-i (рис. 4 ,6 ) оп р еделяется в такой п о ­
след ов ательн ости :
(5 )
G3 -з = G 3 + G4;
R2~2 = R i + G3_3_1 + T?4 = /?3 + /?4+ (G 3 + G4r ' ;
G2-2 = G2 + R2-2 ' = G2 + (/?3 + ^4+ (G 3 + G4)_i)
R i-t = R i + GH
G,_, = G, +
‘+
= R i + R i + [G 2 + (R 3 + R *+ (G 3 + G 4)~l)
= G, + {Л , + R 2 + [G 2 + (Л 3 + Я 4+ (G 3 + О .Г V ] " ' Г ’ -
Рис. 4. Преобразование смешанной цепи
Отметим, что можно получить выражения (5 ) тольк о с проводим остя­
ми, если обозначить R = СГ1, или тольк о с сопротивлениями, если обозн а­
чить G = R~l. Однако использование гибридны х обозначений резисторов
упрощ ает запись соотнош ений (5).
Преобразование грехполю сны х цепей. При расчете электрических цепей
часто бывает полезным преобразовать звезду в треугольник или треугольник в
звезду. На рис. 5,а приведен двухполюсник 1-1 с внутренней структурой звезда-треугольник. Путем преобразования звезды в треугольник (рис. 1,6) можно
легко определить значение проводимости (сопротивления) между полюсами 11 и представить исходную цепь в виде двухполюсника (рис. 1,в).
в)
Рис. 5. Исходная цепь звезда-треугольник (о );
цепь после преобразования звезды в треугольник (б );
цепь после преобразования треугольника в двухполюсник (в)
Д ля нахождения взаимосвязи меж ду проводимостями тр ехп олю сн ы х
цепей воспользуемся схемами на рис. 6 . Различие м еж ду схем ам и стира-
ется при равенстве напряжений и токов трехполю сны х цепей. Это у с л о ­
вие и будет использовано в дальнейшем.
П р е о б р а з о в а н и е
звез ды
в
т р е у г о л ь н и к .
Д ля
этого случая н еобходим о проводимости G\2, G 23, G 31 треугольника выра­
зить через проводимости G\, G2, G 3 звезды. Д ля звезды (рис.
6
,а ) суммар­
ный ток равен нулю :
(6)
/, + 12 + / 3 = Gi ( U\ - I/o) + G 2 ( U 2 - С/о) + G 3 ( U 3 - Щ = 0.
И з ( 6 ) находим
(7 )
ип
G , U , + G 2 U 2 + G 3U }
G, + G 2 + G^
П о с ле подстановки (7 ) в ( 6 ) находим
/, = G\{U\ - С/о) = а д
-G ,
(J, U л+ G 9U -у + G ->U т
1 '
* 2 „ 3 3
- =
C/j + Cj2 + Cj3
= (G 2 + G 3 ) U ] - G f i 2 U 2 - G XG 3 U }
G, + G 2 + G 3
Рис. 6. Соединение резисторов по схеме звезда (а) и треугольник (б )
Д ля треугольника ток
(9 )
/, = / 12 - / 31 = G ,2(t/, - U 2) - G I3( t / 3 - U\) =
= ( G l2 + G 13) £ / , - G 12t/2 - G l3t/3.
П о услови ю в обеи х схем ах токи 1\ долж ны бы ть равными при лю бы х
одинаковых напряжениях U\, U 2, С/3. П оэтому, приравняв коэффициенты
при U 2, U} правых частей выражений ( 8) и (9 ), получим
g ,g 2
G, + G 2 + G 3
(11 )
G31 = ----- G|G;
G, + G 2 + G3
П одобны м образом определяется третья проводимость
( 12)
G
23
= — G?G i
,
g ,+ g 2+ g 3
Отметим, что в соотнош ениях (10 )— (1 2 ) индексы проводимостей G*/
треугольника соответствую т индексам проводимостей G k , G/ звезды.
П р е о б р а з о в а н и е
т р е у г о л ь н и к а
в
звезду.
Для
этого случая необходимо проводимости G„ звезды выразить через проводимости
G*/ треугольника, что достигается решением системы уравнений ( 10)— ( 12).
Разделим (12) на (1 0 ) и (11 )
(1 3 )
^23 _ f i .
(?23 _ G 2
g ,2
g 31
g ,’
g ,’
Определив из (1 3 ) G 3, G2 и подставив в (1 2 ), получи м
(1 4 )
G23
„ G„
G, + G, —22. + G, —
G3)
Gj2
G,2G.
G ^ fii
И з ( 1 4 ) находим
(1 5 )
G , = G I2 + G 3I + ^ 2 < k
П одобны м образом определяю тся другие проводимости
(1 6 )
G 2 = G 23 + G 3| + б2зСз1 ;’
G
12
G3J = G~ I2 + G
~ „ +' — s-^31
Учитывая, что G = \IR, можно записать соотнош ения (1 5 ), (1 6 ) в с л е ­
дую щ им виде:
R
-
^
12^31
.
^
_
^
/?| + /?2 + Rj
12^ 2 3
R f + R 2 “Ь /^3
.
^
_
^
2 3 ^ 3 1 _____
/^] + /?2 + /?,
П р еобр азован и е и сточ н и к ов . Рассмотрим преобразование цепей, с о ­
держащих несколько источников.
П о с л е д о в а т е л ь н о е
нения
источников.
и
п а р а л л е л ь н о е
с о е д и ­
П ослед овательн о соединенны е источники
напряжения Е\, Е 2, Е 3 (рис. 1,а) можно заменить одним эквивалентным
источником с Э Д С Е — Е\ + Е 2 + Е 3. П ар а ллельн о соединенны е источники
тока J 1, J2, Уз (рис. 7,в) также мож но заменить одним эквивалентным ис­
точником с током J - J\ + J 2 + J3.
Е,
----о
- 0 ------о
ф
г
^ £г Ьз
^
ф
^ £
5) ^ S>
Л
-еj,
—
°
:)*с м
£=> (&J
)
---о
Рис. 7. Преобразование источников
В экзотических случаях (п оск ольк у их практически никогда не б ы ­
вает) п ослед ов а тельн ого соединения источников тока (рис.
1
,6 ) и па­
р а л ле л ьн о го соединения источников напряжения (рис. 7,г ) эквивалент­
ные ток J и напряжение Е долж ны иметь наибольш ее из трех представ­
лен н ы х значений. Э то о б у с л о в ле н о тем, что идеальны е источники при
анализе вы полняю т р о л ь независимых переменных. Также практически
никогда не подк лю чаю т проводимость пар аллельно с идеальным и с т о ч ­
ником напряжения (р и с.
1
,д ) и не вводят последовательно соп р оти в ле­
ние с источником тока (рис.
1
,е), п оск ольку они не влияют на парамет­
ры источников.
Р а с щ е п л е н и е
и с т о ч н и к о в . На рис. 8 приведены два с л у ­
чая включения источников, которые могут затруднить проведение анализа:
=> подключение ист очника напряж ения к узлу с тремя ветвями. В этом
случае исходная цепь заменяется эквивалентной схемой в виде трех
параллельны х цепей с отдельны м источником напряжения в каждой.
Вы деленны е узл ы 1 в эквивалентной схеме имеют такое же напряже­
ние, как и у зе л 1 в исходной цепи;
=> включение ист очника тока в контур с тремя ветвями. В этом случ ае
источник тока расщ епляется на три источника, каждый из которы х
подсоединяется к соответствую щ ей ветви. Режим эквивалентной цепи
сохраняется, так как при разрыве перемычек 1- 1, 2 - 2 она преобразу­
ется в исхо дн ую цепь (см. рис. 8 ,6 ).
Замена
т о ч н и к о м
н е с к о л ь к и х
и с т о ч н и к о в
напряжения.
Представим параллельную цепь, с о ­
одним
и с ­
держ ащ ую источники напряжения Е т с внутренними сопротивлениями
R m и источники тока J n (рис. 9,а), эквивалентным источником напряжения
Е с внутренним сопротивлением R (рис. 9,6). Составим уравнения
J
у®
С=^> 1
ф £
£ ф
гф
П
1=> J
с ф
б)
а)
Рис. 8. Расщепление источников
==> для цепи на рис. 9,а:
М
(1 7 )
N
/ = £ / „, + Х Л ;
т- 1
/7=1
E m - R mI m = U x_x -
=> для цепи рис. 9,6:
(1 8 )
E -R I= U
где U\_\ — напряжение на полю сах 1 - 1 цепей.
И спользуя (17), (18), запишем выражения для тока
М
(1 9 )
М
N
/ = Х £ т /Лт - ^ , - , 1 1/Ят + 1 Л
т~1
т- 1
я=1
= E ! R - U XJ R .
Равенство токов / в схемах рис. 9,а и б долж но вы полняться при л ю ­
бы х значениях U\-\, что возможно тольк о, когда коэффициенты при U\.\ в
(1 9 ) равны, поэтому
(20)
м
1/Л = £ 1/Ля .
19
I
*п
)Js
*о
б)
1о
П о сле подстановки (2 0 ) в (1 9 ) находим второй параметр эквивалент­
ного источника напряжения
N
1 Х
я , + 1
л
т=1___________ п- 1
М
I l /л,
от=1
П р е о б р а з о в а н и е
и с т о ч н и к
тока
и
и с т о ч н и к о в
н а п р я ж е н и я
в
о б р а т н о . Такое преобразование бази ру­
ется на теорем е о б эквивалентном генераторе (см . параграф 2.3). На
рис. 10 приведены схем ы источников напряжения и тока и показана
связь параметров.
R=\!C
]—
С
-с
Рис. 10. Преобразование источника напряжения
в источник тока и обратно
2.2. Основные топологические методы анализа
цепей
К основным методам анализа цепей на постоянном токе относятся метод
Кирхгофа (токов и напряжений), метод контурных токов и метод узловых
напряжений (потенциалов). Особенности методов рассмотрим на примере
цепи, содержащей пять резистивных элементов и два источника напряжения.
Схема цепи, на которой стрелками показаны выбранные направления токов
и напряжений, изображена на рис. 1. Для обозначения токов и напряжений
использую тся строчные буквы, отражающие то обстоятельство, что все со­
отношения справедливы для мгновенных значений. В рассматриваемой схе­
ме число ветвей N B = 5, число узлов N y = 3. Задача анализа заключается в
определении токов всех ветвей цепи или (и) напряжений на элементах.
М е т о д К и р х го ф а . В этом м етоде при описании цепи использую тся
оба закона Кирхгофа. П о это м у его называют также м ет одом т оков и
напряж ений. Д ля нахождения неизвестных токов и напряжений ветвей
н еоб ход и м о располагать систем ой из N B = 5 линейно-независимы х урав­
нений. Ниж е приведены уравнения, составленны е для всех узлов и всех
конт уров рассматриваемой схем ы (рис. 1).
Рис. 1. Схема цепи для иллюстрации методов Кирхгофа
и контурных токов
У зел
( 1)
Уравнение
1
+ lR \
~
= 0
- lR3
lR 2
2
_
3
- h\
1
e\-R \-R 2
2
R 2 —R 3—R 4
3
R.\—R 5— e 2
4
5
6
R z “ R jr &
lR 5
= 0
Уравнение
+ U r \
=
+ U R 2
- U
e 1 ~R 1
+UR4
r 2
+ «Л 1
e i~ R i-R i~ R s- e2
_
+ tR 4
Контур
(2 )
Ira
= 0
+ИД1
+ИДЗ
0
-e 2
~ U r 4
+ U r s
=
+ U r 3
+U R 4
=
+«R5
ei
=
=
e\
e x- e
2
s ~
П р и м еч ан и е: вы д е л е н ы «л и ш н и е» у р а в н ен и я
И з соотношений (1), (2 ) следует, что одно из уравнений для узлов и три
уравнения для контуров оказались лишними. Действительно, в результате
сложения уравнений для узлов 1 и 2 получается уравнение с обратным зна­
ком для узла 3. Уравнение для контура 4 (e\-R \-R y-R 4) может бы ть получено
сложением уравнений для контуров 1 и 2; для контура 5 — путем сложения
уравнений для контуров 1 и 3; для контура 6 — при сложении уравнений для
контуров 2 и 3. В качестве базовой системы уравнений для определения то­
ков ветвей iRn(n = 1-5) выбраны уравнения для узлов 1,2 и контуров 1,2,3.
В общ ем случае необходим о составить N y - 1 (3 - 1 = 2 ) независимых
уравнений по первому закону К ирхгоф а и N B- N y + 1 (5 - 3 + 1 = 3) неза­
висимы х уравнений по втором у закону Кирхгофа. С оответствую щ и е
этим уравнениям узлы и контуры называются независимыми.
П ри состав лен и и систем ы уравн ени й для определени я ток о в ветвей
hn ( п =
1-5) н ео б х о д и м о в соотн ош ен и я для токов кон туров 1-3 п од­
ставить uR„ = R„ iR„. В результа те получаем с л е д у ю щ у ю
си ст ем у из
пяти уравнений:
1
+ 1 -г'я1
- \ - i R2
+R\-iRi
+ R r i R2
2
+ 1 -г'яз
3
4
=
- 1 ‘*лз
—R 2 -iR 2
+RyiR3
5
- l - i R5
-\ - iR4
+ R r iR4
+ R y iK
—RylRA
0
=
0
=
e\
=
0
=
- e2
Запишем эту систему в матричной форме.
" +1
-1
-1
0
0
l R\
0
0
0
+ 1
-1
-1
l R2
0
R^2
0
0
0
l R3
2
+ R
0
гЛ4
+ *.
0
- r
0
3
0
+
R
4
- R a
-1
of
+
0
+
_ l R5
=
e.
0
_
В общ ем случае (когда в каждой ветви имеется источник напряжения
еп) матричная форма уравнений им еет вид A i = Be, где А , В — квадрат­
ные матрицы размером N Bx N B коэффициентов при токах ветвей и напря­
жениях (Э Д С ) источников; i, е — матрицы-столбцы N Bx 1 искомы х токов
и известны х напряжений источников.
Е сли в уравнения для узлов 1, 2 подставить iR„ =
urJR „
(п = 1-5), то
можно п олуч и ть систем у уравнений относительно напряжений uRn на
резистивных элементах.
М е т о д к о н т у р н ы х ток о в . В этом методе при составлении системы
уравнений исп ользуется тольк о вт орой закон Кирхгофа. Неизвестными
величинами являю тся контурны е токи. Рассмотрим последовательность
составления уравнений для схем ы на рис. 1 .
Выразим токи ветвей (элем ен тов ) через токи контуров
(4 )
ir \ =
i\, in7 — i\ - h\ ‘ю = h i h 4 = h — h\
= h-
И спользуя (1), составим уравнения Кирхгофа для независимых контуров:
(5 )
uR\+ uR2 = R\ i\ + Rz(i\ - h ) = e\ — Для контура e\ -R \ -R 2,
- u R2 + uRз + Ur4 = —R 2 (it - i2) + R 3 h + R* ( i i ~ гз ) = 0 — Дл я R i-R y-R ^,
- u R4 + u R 5 = - / ? 4 ( i 2 - h ) + Rs h = ~e 2 — Для контура R 4 - R 5— e2.
Система уравнений для контурных токов в матричной форме имеет
следую щ ий вид:
(6)
R 2]
Л .
Rn
Rn
R 22
R 23
h
R 32
V
h.
где R„i =R h i (к
«i
ri) —
=
0
или
R i = е,
взаимное сопротивление контуров, равное со­
противлению общей для контуров п и к ветви. Сопротивление берется с от­
рицательным знаком, который учитывает встречные направления токов в
смежных контурах: R n = R 2] = - R 2, R n = R 3l = 0; R 23 = R i 2 = - Л 4; R„„ (k = n ) —
собственное сопротивление контура, равное сумме сопротивлений всех вет­
вей «- г о контура:
R] ] = R i + R 2', R h = R 2+ R i + R 4,
/? з з
= /?4+/?5 .
Таким образом, вместо непосредственного расчета пяти токов ветвей
ставиться задача нахождения трех контурных токов /„, которые опреде­
ляю тся в результате решения системы уравнений (5 ), ( 6 ). П осле их нахож­
дения с помощ ью соотнош ений (4 ) определяю тся токи iR„ ветвей и при
необходимости напряжения uRn на сопротивлениях.
М е т о д у зл о в ы х нап ряж ени й. В этом м етоде при составлении систе­
мы уравнений используется тольк о закон Кирхгоф а для узлов. Н еизвест­
ными величинами являются напряжения узло в отн осительно оп ор н ого
(базов ого) узла, потенциал которого принят равным нулю . Рассмотрим
последовательность составления уравнений.
П оскольку используется закон Кирхгоф а для узлов, в исходной схем е
на рис. 1 следует заменить источники напряжения источниками тока
(рис. 2,а). Перейдем к схеме (рис. 2,6), для которой и будем составлять
уравнения. В качестве опорного узла выбран у з е л 3.
1
R,
2
G2
------- *!j>— L_J— С?------
U02
k; 1
(ря.
[j]Я2 ^
у я 4 [j]я5 (5 $)/2
in,
2
-----! = ] ----*— p
/1 (i s>
] G,
а)
1
*03
^ “ ra |[ } Gl
Q
6)
Рис. 2. М етод узловых напряжений
Выразим токи ветвей (элем ен тов ) через напряжения узлов с учетом
того, что щ = 0 :
Ig 1 ~ GyU\\ icz — G r ( U ] - м2); /'gз _ G y u 2.
(7 )
И спользуя (7 ), составим уравнения Кирхгофа для независимых узлов:
(8)
г'о! + ‘а = С г м, + G 2-(mi - и2) = j\ — для узла 1 ;
*02— гоз = G 2 -(u\ — и2 ) + G yUi — —
j2
для узла 2 .
Система уравнений для узловы х напряжений в матричной форме им е­
ет следую щ ий вид:
Gn
G 21
G 22
J)
u2
J i.
где G„k = G kn( к Ф п ) — взаимная проводимость узлов, равная проводим о­
сти ветви, соединяю щ ей узлы п и к ; берется с отрицательным знаком,
поскольку в напряжение ветви напряжение узла к входит со знаком м и ­
нус: G \2 = G 2i = - G 2; G„„ ( k = n ) — собст венная проводимость узла, рав­
ная сум ме проводимостей всех резистивных ветвей, присоединенных
к «-у з л у : G n = G i + G 2; G 22 = G2+ G 3.
Узловы е напряжения u„ определяются в результате решения системы урав­
нений ( 8), (9). П осле их нахождения с помощью соотношений (7 ) определяют­
ся токи ic „ ветвей и при необходимости напряжения (м д ) на элементах.
О бсуж ден и е р е з у л ь т а т о в . А н а ли з цепи с использованием рассм от­
ренных м етодов сводится к реш ению системы из N линейны х алгебраи­
ческих уравнений с известными коэффициентами а„к и свободными ч л е ­
нами (правыми частями) Ъ„ относительно неизвестных хк (п, к = 1, ..., N ).
Корни
уравнений
мож но
представить известной ф ормулой Крамера:
хь = D t/D, где D — опр едели тель (детерминант); D* — дополнительны й
определитель, т.е. определитель, в котором коэффициенты а„к к-то с т о л б ­
ца заменены свободны м и членами Ь„. Представление уравнений в виде
матриц позволяет формализовать процесс их решения и использовать для
вычисления корней разработанные компью терные программы.
М етод влияет на количество уравнений, используемых для описания цепи:
=> м ет од К ирхгоф а требует наибольш его числа уравнений. О бщ ее чи сло
уравнений равно чи слу всех ветвей цепи N Mк = N B, для которых опр е­
деляю тся токи и (и л и ) напряжения;
=> в м ет оде узловы х напряж ений используется чи сло уравнений, равное
чи слу независимых узлов, которое на единицу меньше общ его числа
узлов ДмУН = N y - l , поскольку используется опорный узел;
=> м ет од конт урных т оков обходится числом уравнений, равным чи слу
независимых контуров:
TV m k t
= N b- (N y - 1).
М етодам и Кирхгофа и контурны х токов можно пользоваться тольк о
для планарных цепей, не имею щ их пересечений ветвей. М ето д узловы х
напряжений мож но применять для анализа цепей лю бой конфигурации.
В методе контурных токов полагается, что все источники являются ис­
точниками напряжения, т.е. заданы последовательными эквивалентными
схемами. Если источник, включенный в некоторой ветви разветвленной це­
пи, представлен генератором тока (параллельной эквивалентной схем ой), то
он долж ен быть преобразован в последовательную схему. А н алогичное за­
мечание относится и к методу узловых напряжений (см. рис. 1 и 2 ).
И з излож енного выше следует, что рассмотренные топ ологически е
методы имею т общ ую м етодологическую основу.
В ы бор метода может определять количество совм естно реш аемых
уравнений. В этом случае следует иметь в виду, что:
=> е с л и ц еп ь с о д ер ж и т б о л ь ш о е ч и с л о н езав и си м ы х к о н т у р о в при н е ­
б о л ь ш о м к о л и ч е с т в е у зл о в , т.е. N
m kt
> N My h ,
то
ц е л е с о о б р а з н о вы ­
бр а ть м е т о д у з л о в ы х напряж ений;
=> е с ли цепь содерж и т отн оси тельн о н е б о л ь ш о е ч и сло независим ы х к он ту­
ров, т.е. N MKt < N MyH, то разум нее и сп ользов а ть м етод к он тур н ы х токов.
2.3. Принципы, методы, теоремы
Излагаемые ниже основные принципы и методы будем иллюстрировать на
схеме с тремя резисторами и двумя источниками постоянного напряжения
(рис. 1). Для этого, выразим токи ветвей (элементов) через токи контуров
(1)
I r\ =
I r ~ I\ —h't iR2 = ~ h
и запишем уравнения Кирхгофа для независимых контуров в виде
(2 )
(/Л|+ U R = Я , /, + R(I\ - / 2) = ( Л , + R ) /, - R /2 = Е й
U ri + U
r
= - R I 2+ Щ
- /2) = R /, - (R 2+ R ) /2 = е 2.
I ri
I ri
Рис. 1. Схема цепи для иллюстрации принципов, методов и теорем
Реш им систему (2 ) отн осительно контурных токов 1\, 12 и, учитывая
( 1 ), получи м следую щ и е выражения для токов ветвей:
,,ч
( 3 )
,
(R 2 + R ) E t - R E
J R l ~ ---------------- 7
,
2
>
RE] - ( R
l R2
~
2
+R)E2_
T
>
,
_ R 2 E [ + R lE 2 ,
l K ~
д
где
(4 )
A r = (R\ + R) ( R 2 + R ) - R
2
= R , R 2 + R (R i + R 2)-
П р и н ц и п и м етод н а л о ж ен и я . Как уже отм ечалось выше, принцип
налож ения, или суперпозиции, отражает фундаментальное свойство л и ­
нейны х цепей, благодаря котором у они в наиболее полн ой мере изучены
и проработаны.
Ф о р м у л и р о в к а
дейст вие
нескольких
п р и н ц и п а : отклик линейной цепи на воз­
независимых
источников равен
алгебраической
сумме откликов на воздейст вие к а ж д ого источника в отдельности.
П ринцип справедлив для л ю б ы х видов независимых источников, воздей­
ствий и откликов. Его называют также принципом независимости дейст ­
вия, так как каждый источник (и л и составляющая слож н ого воздействия
на ли н ей н ую цепь) вызывает свой отклик независимо от того, действую т
л и в системе другие источники (и ли составляющ ие).
Принцип суперпозиции леж ит в основе метода наложения, который во
многих случаях облегчает расчет цепи, находящейся под воздействием не­
скольких источников (рис. 2,а). При расчетах методом наложения в схеме
оставляют один источник (например, источник напряжения ек, как показано
на рис.
, ), остальные источники удаляют, сохраняя их внутренние сопро­
2 6
тивления и проводимости. Зажимы (полю са) удаленных источников напря­
ж ения замыкают накоротко, источников тока —
оставляют свободными
(разомкнутыми). Определяют напряжения и токи ветвей полученной л о ­
кальной схемы. П о завершении расчетов всех локальных схем вычисляют
алгебраическую сумму найденных напряжений и токов.
Пример.
Д ля подтверж дения справедливости метода наложения
определим токи в ветвях цепи на рис. 1 в отдельности от каждого источ­
ника напряжения Е\ и Е 2, а затем найдем их суммарное значение. Д ля
определения токов восп ользуем ся общ ими соотнош ениями (3).
1 .Т о к и
ветвей
при
(рис. 3, а ), когда Е 2 = 0:
действии
только
источника
напряжения
Е\
I
Р е зи с т и в н ы й м н о го п о л ю сн и к
Р е зи с ти в н ы й м н о го п о л ю с н и к
L
J***L
а)
_I***L
J
б)
Рис. 2. Принцип наложения
2.
Токи
ветвей при действии
только
ист очника
напряж ения Е 2
(рис. 3, б ), когда E i = 0 :
/
(6)
- ~RE2■
I
Л1|£1=0
д
’
/
1
I
_ ( * 2 + В Д .
К2|л=0
д
’
,
I
У*|£1=0 _
Л
>
3. И спользуя (5 ) и ( 6 ), найдем суммарные токи ветвей:
(R 2 + R )E t - R E 2
(7 )
J Rl _ / * l |£2=0
REl - ( R
J
A
= /
I
я |£2=0
+ /
I
*I£1=0
-
2
1
2
+R)E7
12
*
С опоставление (7 ) с (3 ) свидетельствует о том, что м етод наложения
дает такой же результат, как и м етод контурных токов.
■о
а)
6
)
Рис. 3. М етод наложения
Следует отметить, что метод наложения не может быть распространен на
суммирование мощностей, вьщеляемых на элементе от каждого источника в
отдельности, так как для любых г (R\, R2, R) справедливо соотношение
(/2|
'
О
i£2=0
+ / 2|
)- Г 5* (/|
lfl=0 '
п р и м е н е н и и
'
2=0
+/|
}г.
I£1=0'
метода.
П о л ь з у я с ь м ето д о м суп ер п о зи ­
ции, цепи со м ногим и источни кам и м ож н о р азд ели ть на н еск ольк о
ц еп ей с одним источником. Н ай д ен н ы е частны е токи при каж дом о т ­
д ельн ом и сточни ке затем склады ваю т. П олуч ен н ы е сум м ы равны т о ­
кам и сх о д н о й цепи. Р о л ь принципа суперпозиции в теори и ц еп ей наи­
б о л ее п о л н о раскрывается при анали зе цепей со сл о ж н о й ф ор м ой во з­
дейст вую щ их колебаний. М ето д ы анализа строятся на представлен ии
с л о ж н о го к олебан и я в виде сум м ы элем ентарны х воздействи й и и зу­
чении реакции цепи на них.
Т е о р е м а взаи м н о сти . Рассмотрим резистивную цепь, не содерж ащ ую
источников. В ы д ели м в ней две ветви: ветвь 1-1 с сопротивлением R\ и
ветвь 2 -2 с сопротивлением R 2 (рис. А,а).
С у щ н о с т ь принципа взаим ност и, или обрат им ост и, с о с т о и т в с л е ­
д ую щ ем . Е сли при вклю чении в ветвь 1-1 источника напряж ения Е\ в
ветви 2—2 создается ток J (рис. 4 ,6 ), то при вклю чении в ветвь 2—2 ис­
точника напряж ения Е2 = Е\ в ветви 1-1 также б у д ет создаваться
ток J (р и с. 4,в).
б)
а)
Рис. 4. Принцип взаимности
Пример.
Н а рис. 5 и зобр аж ен а цепь, в которой в ы д елен ы вет­
ви 1-1 и 2 -2 и п р и веден о два с п о с о б а вклю чения и сточ н и к ов Е\ и Е 2.
И з п о л у ч е н н ы х вы ш е с о о тн о ш ен и й (5 ) и ( 6 ) вы пиш ем значения тока
/ и при Е 2 = 0 д л я схем ы на рис. 5 ,а и тока I R\ при Е\ = 0 д л я схем ы на
рис. 5,6:
( 8)
REX
Я2|£2=0
А*R
. '
_ ,
RE,
и
‘-‘ Я
Из ( 8 ) находим передаточные функции, или передаточные проводимости
короткого замыкания от контура 1 к контуру 2 и от контура 2 к контуру 1 :
R
Г'
_
_R_
R1
О лу — -------
(9 )
£ 2=0
' а R,
е
2
--
-
'а .
И з выражений ( 8 ) следует, что при Е \ = Е 2 = E токи ветвей 1-1 и 2-2 и
передаточны е проводимости равны между собой. Знак минус свидетель­
ствует о том , что токи протекаю т в противоположных направлениях по
отнош ению к указанным токам на рис. 5.
£■()
( ) &
о
о
а )
о
2
Рис. 5. М етод взаимности
Ф о р м у л и р о в к и
п р и н ц и п а
взаимности.
Е сли ис­
точник напряжения Е, включенный в некоторую ветвь 1-1 линейной
электрической цепи, не содержащей други х источников энергии, создает
ток J в другой ветви 2-2, то включение того же источника напряжения Е
в ветвь 2 -2 вызовет такой же ток J в ветви 1-1.
В теории цепей принцип взаимности рассматривается как теорема, дока­
зательство которой строится на симметрии определителей при рассмотрении
методов контурных токов и узловых напряжений. П оэтому возможна другая
формулировка принципа взаимности [22]. В цепи, составленной из двухпо­
лю сных пассивных элементов, передаточные проводимости короткого за­
мыкания от контура т к контуру и и от контура п к контуру т одинаковы:
G m„ — G„m, а также одинаковы передаточные сопротивления холостого хода
от узла j к узлу £ и от узла к к у злу j : RJk = Rkj.
На принципе взаимности основан метод (взаимности), облегчающий в не­
которых случаях анализ сложных цепей. При его практическом использовании
следует учитывать взаимное соответствие направлений токов и напряжений.
М ето д эк в и в а ле н т н о го и сточ н и к а. В ситуациях, когда требуется о п ­
ределить напряжение и ток в одной ветви исходной цепи, содержащ ей
источники, целесообразно вы делить эту ветвь (рис. 6 ,а), а оставш уюся
часть схемы представить эквивалентным ист очником (генератором ) на­
пряжения или тока. При таком подходе задача анализа сводится к опр е­
делению параметров источника. Д ля ее реш ения и сп ользую т м ет од х о ­
лостого хода и короткого замыкания:
=> при отклю ченной от зажимов 1—1 ветви R ( G ) определяется напряже­
ние £/хх холостого хода (рис.
6
,6 );
=> при замкнутых зажимах 1—1 определяется ток /ю короткого замыкания
(рис. 6 ,в );
=> по найденным величинам определяю т параметры источника:
•
для источника напряж ения (рис. 6 ,г ) Э Д С Е = £/хх, внутреннее с о ­
противление R„ = С/хх//кз;
•
для источника тока (рис.
6
,д ) величина тока J — /и, внутренняя
проводимость G„ = /кЖ х .
Внутреннее сопротивление (и проводимость) эквивалентного источ­
ника может бы ть также определено как сопротивление двухполю сника со
стороны зажимов 1—1 при отклю ченны х внутренних источниках тока и
замкнутых полю сах источников напряжения.
1
чТ]
И сточни к
И сточни к
R(C)
1
/кз
И сточник
j Ухх
1
1
‘
б)
а)
R v rV J I„
----- -i__J------1
1
в)
1
i
E=U„ ф
J=U, Ф
G ,= IJ U „ Q
0
1
/
■ t i
1
д)
г)
Рис. 6. Принцип эквивалентного источника
Пример.
О п р ед ели м параметры эквивалентных источников на­
пряжения и тока (рис.
6
,г ,д ) для схем ы на рис.
1
,а со стороны п о л ю ­
сов 1—1. В осп ользова вш и сь (3 ) запишем выражения для тока и напря­
ж ения ветви 1- 1 :
Л*
где А * = (Я , + R ) (R 2 + R ) - R
2
= R ^ R 2 + R (R\ + R 2)-
И сп ользуя (1 0 ), находим:
=> напряжение х о л о с т о го хода (рис. 7,6):
(И )
(
=и
jj
)
I
= R2E ] + R iE 2
хх
r ]+ r
2
=> ток короткого замыкания (рис. 7,в):
( 12)
(
’
I
=/ I
кз
я|*-°
= R 2 E <+ R ^
R ,R 2
= ^ l +^±
R,
R2
Н а основании (1 1 ), (1 2 ) определяем внутреннее сопротивление (п р о ­
водим ость) источников:
(1 3 )
U R y R 2
1
Ди = - ^ - = - 1 2 Rl + R2
G„
и
Uv
представляю щ ее собой
сопротивление со стороны полю сов
замкнуты х накоротко источниках напряжения (рис. 7,г).
1—1 при
/1
Л|Й
/ 2
/|
/|
Е| ( )
ЛгЙ
Y1
с / |П Л
Л,Й
h
4
/}
>
e 2Q
e
, Q
1
с /« |
e 2Q
------Ъ — I
I ------ и ___J
а)
б)
1
Е, ф
в)
Рис. 7. М етод эквивалентного источника
П р и н ц и п зам ещ ен ия (к о м п е н с а ц и и ). Л ю бая ветвь 1—1 цепи с на­
пряжением и и током / (рис. 8 ,а ) мож ет бы ть замещ ена л и б о источником
напряжения Е с напряжением и (рис.
8
,6 ), л и б о источником тока J с т о ­
ком i (рис. 8 ,в). Такая возможность вытекает из законов Кирхгофа. Заме­
щ ение не вызывает изменения распределения напряжений и токов в цепи.
Рис. 8. Принцип компенсации
П р и м е р . Д ля замещения проводимости G 3 в цепи на рис. 9,а ис­
точником напряжения определяю тся напряжение и ток
и = E\/{RxGz + 1); /= E\G ^(R\G z + 1)> где G% = G 2 + Gy.
П ри замещении проводимости G 3 источником напряжения (рис. 9,6)
п р и н и м аю т Е
=
E\/(R\Gх +
1),
а и сточ н и к ом
ток а
(р и с .
9 ,в ) —
J = E t G ,/ (*,< ? £ + 1).
я,
i
1
Я,
/
1
R.
7 - С ) £' С )
i
G2M
1
и\
\ Ei Gj
A,Ci+l
Рис. 9. М етод компенсации
Ч т о б ы убедиться в тож дественности схем на рис. 9,а и рис. 9,6 опре­
делим ток 1\, протекающий через сопротивление R\. В схем е на рис. 9,а
ток /| = E\/(R\ + G j f 1), в схеме на рис. 9,6 — получаем такой же ток
h = [ E , - E {l {R[ GY. + \)]IRl = E x G j/ № G x + 1) =£,/(Л, + G j f 1).
3. ЦЕПИ ПРИ ГАРМОНИЧЕСКОМ
ВОЗДЕЙСТВИИ
3.1. Метод комплексных амплитуд
Введение. М етоды анализа резистивных цепей постоянного тока сводятся к
решению систем алгебраических уравнений. Поведение динамических цепей
с емкостными и индуктивными элементами описывается более сложными
системами, содержащими интегро-дифференциальные (или дифференциаль­
ны е) уравнения. Излагаемый в этой главе метод комплексных амплитуд
базируется на преобразовании интегро-дифференциальных уравнений в ли­
нейные алгебраические уравнения с переменными в виде комплексных ве­
личин. П оэтом у метод позволяет использовать для анализа стационарного
(установивш егося) режима цепей при гармоническом воздействии рассмот­
ренные выше методы для резистивных цепей.
Задача ан али за. В основе метода комплексных амплитуд леж ат свойст­
ва гармонических колебаний', при алгебраическом суммировании (сложении
или вычитании), дифференцировании и интегрировании гармонических ко­
лебаний с одинаковыми частотами их форма сохраняется, изменяется лишь
амплитуда и начальная фаза результирую щ его колебания. Указанные свой­
ства гармонических колебаний позволяют свести описание цепи в виде ин­
тегро-дифференциальных уравнений к уравнениям, для решения которых
используется алгебра комплексных чисел. При гармоническом воздействии
задача анализа установившегося реж им а состоит в определении ком­
плексной амплитуды, содержащей сведения об амплитуде и начальной фазе
отклика (чем и обусловлен о название метода).
В теории цепей м етод ком плексны х амплитуд п олучи л ш ирокое рас­
пространение благодаря:
=> пот ребност и проведения анализа при гармоническом воздействии,
п оск ольк у гармонические колебания использую тся для питания раз­
ли ч н ы х электротехни ческих устройств, для передачи информации,
в качестве тестовых сигналов при наладке и испытаниях электронной
аппаратуры и т.п.;
=> простоте проведения анализа и выполнения расчетов с использова­
нием рассмотренных выше методов для резистивных цепей постоян­
ного тока;
=> возможности использования результатов анализа на воздействия
произвольных периодических и непериодических сигналов (с по­
мощью рядов и интеграла Фурье по принципу наложения).
Обоснование и сущность метода. В параграфе 1.3 было показано, что
систему топологических и компонентных уравнений для определения ин­
тересующей реакции можно свести к одному интегро-дифференциальному
уравнению. Такое описание динамических цепей является наиболее пол­
ным и общим. Для обоснования метода комплексных амплитуд воспользу­
емся уравнением для параллельного колебательного контура (рис. 1,а )
(1)
iG + ic + iL = G -u + C — + — [и dt = j ,
dt L 3
J
полагая, что на цепь воздействует ток
(2 )
i(t) = I cos (со/ + ср,).
Решение уравнения (1) будем искать в виде
(3)
u(t) = U cos (ю/+ ф у).
Представим ток (2) и напряжение (3) в комплексной форме
(4)
/ = 0,5[/ехр(у'а)/) + / ехр(-у'со/)];
где / = /ехр /ф /; Г = Iexp (-jq >,);
и = 0,5 [£/ехр(у'со/) + £/*ехр(-/ш/)].
U = Uexp j<pb,;
O ' = £/ехр(-у'фу).
После подстановки (4) в (1) и приравнивания коэффициентов при
ехр(/со/) и exp(-j(at), получаем систему из двух уравнений
1
II
1
G + у'соС н------j(oL )
п
(5)
fG
1
усоС
1 ^
№
J
и ’ - y 'u ’
которые перепишем в следующем виде:
(6 )
Y \ U е х р /( ф к+ ф (у) = / е х р /ф ,; | Y \ U е х р -^ ( ф к+ ф и) = 1 е х р -уф ,.
Полученные выражения (5), (6 ) являются аналогами дифференциаль­
ного уравнения цепи на рис. 1,а, при этом первому уравнению в ( 5 ) соот­
ветствует схема замещения на рис. 1,б. Из (6 ) следует, что для определе­
ния U и фу достаточно одного из уравнений, после чего по формуле (4)
можно перейти к мгновенному значению напряжения (3 ).
а)
б)
Рис. 1. Схема параллельного колебательного контура (а)
и ее комплексное представление (б)
Таким образом, с у щ н о с т ь м е т о д а к о м п л е к с н ы х ам­
плитуд состоит:
=> в переходе от мгновенных значений напряжений и токов (2 ), (3) к их
изображениям в комплексной форме (4): /(/) —» / ; u(t) —» U\
=> в составлении уравнений (5), (6 ) и их решении относительно искомых
комплексных амплитуд U. Для рассматриваемого примера из (6 ) на­
ходим U = U ехр /(фу+ фу) = U\ Y |х ехр Дф/ - фк);
=> в обратном переходе от изображений к мгновенным значениям (3):
£ /-> и (0
Теперь перейдем к непосредственному изложению метода комплекс­
ных амплитуд.
Комплексная форма описания цепей. П а с с и в н ы е
двух­
п о л ю с н и к и . Рассмотрим двухполюсную цепь с гармоническими
напряжением и током:
(7)
и = U cos(o)/ + фу); i = I cos(co/ + ф/)
и представим их в виде комплексных величин
(8 )
U = U ехру'фу;
1 = 1 ехр j< p ,.
Если одну из величин принять в качестве воздействия, а другую — в ка­
честве отклика, то можно получить два вида передаточных функций, одна из
которых имеет размерность сопротивления, другая — проводимости:
W
Z = у = у е х р ; ( ф ( , - ф у) = R + jX \
7 = 4 - = ~ j e x p j ( q > l - ф V) = G + jB.
Эти функции могут служить в качестве характеристик пассивных двух­
полюсных цепей. Отметим, что аналогичная ситуация имеет место и в ре­
зистивных цепях, единственный пассивный элемент которых также харак­
теризуется сопротивлением R = u/i = U/I или проводимостью G = Ни = I/U,
поскольку сри = фЛ т.е. для резистивных двухполюсников
(10)
ZR = R; Yg = G.
Введение понятий комплексного сопротивления Z и проводимости Y по­
зволяет описать (характеризовать) емкостные и индуктивные двухполюсники.
Для емкостных двухполюсников, в которых ток с напряжением связаны
■ ^ du
I f ,
соотношением i = C — или u = — y d t , получаем с учетом (7)~{9) сле­
дующие выражения для проводимости и сопротивления:
(11)
Yc = j B c = j(o С;
Zc = j X c = - i - .
/шС
Для индуктивных двухполюсников, в которых ток и напряжение свя­
заны соотношением u = L —
dt
или
/ = — \и d t , выражения для сопроL J
тивления и проводимости имеют вид:
(12)
Z L = j X L = jw L \
YL = j B L = ———.
jOiL
Вещественную и мнимую части в выражениях (9) называют активной и
реактивной составляющими комплексного сопротивления и проводимости.
Поэтому в теории цепей резистивные двухполюсники (10) относят к актив­
ным элементам, а емкостные ( 11) и индуктивные ( 12) — к реактивным.
Независимые
и с т о ч н и к и . С помощью источников на­
пряжения и тока задают воздействующие на цепь колебания. Для их опи­
сания используют выражения ( 8 ).
Описание
ц е п е й . При анализе динамических цепей (также
как и резистивных) составляют топологические и компонентные уравне­
ния. Для топологического описания используются законы Кирхгофа в
комплексной форме, согласно которым сумма комплексных амплитуд
токов в узле и амплитуд напряжений в контуре должна быть равна нулю:
(13)
£ / „ = 0; £ ^ = 0.
п
п
Для описания компонентов используются соотношения (10)— (12).
Особенности анализа. Прежде всего, отметим, что при использова­
нии комплексных величин и законов Кирхгофа в комплексной форме для
описания цепей отсутствует необходимость в предварительном составле­
нии систем дифференциальных уравнений и последующем их преобразо­
вании в алгебраические уравнения для комплексных амплитуд.
Исходными данными при анализе служит комплексная схема замеще­
ния динамической цепи, содержащая базисные элементы R, G, L, С, U, I.
По схеме замещения составляются уравнения равновесия для комплекс­
ных амплитуд аналогично резистивным цепям. Для проведения анализа
установившегося режима можно использовать все методы, рассмотрен­
ные в главе 2 для резистивных цепей:
=> метод эквивалентного преобразования схем;
=> методы Кирхгофа, контурных токов и узловых напряжений;
=> методы наложения, взаимности, эквивалентного источника.
Поэтому анализ динамической цепи методом комплексных амплитуд
отличается от анализа резистивных цепей лишь формальными признака­
ми. Постоянные величины во всех соотношениях и уравнениях представ­
ляют собой комплексные сопротивления Z(/co) и проводимости Y(j(o), а
переменные — комплексные амплитуды напряжения U (со) и тока I (со).
Однако при анализе комплексным методом учитываются не только ампли­
туды и начальные фазы переменных, но и их зависимость от частоты со. Эта
особенность цепей при гармоническом воздействии обусловлена тем, что
сопротивления (или проводимости) индуктивных и емкостных элементов
зависят от частоты. Для выявления всех свойств цепи в этом режиме необхо­
димо исследовать ее основные показатели (функции, характеристики, пара­
метры) цепи при изменении частоты от 0 до °°. Зависимость соответствую­
щего показателя цепи от частоты называют частотной характеристикой.
Поскольку параметры (сопротивления и проводимости) комплексной схемы
замещения динамической цепи и комплексные амплитуды напряжений и
токов зависят от частоты (а не от времени), анализ по методу комплексных
амплитуд относят к методам анализа в частотной области.
Следует отметить еще одну особенность анализа цепей комплексным
методом, которая рассмотрена ниже и состоит в возможности использо­
вания векторных диаграмм для наглядного представления фазовых соот­
ношений токов и напряжений в анализируемой цепи.
Показатели цепей. При рассмотрении двухполюсных цепей основ­
ным параметром является комплексное сопротивление (или проводи­
мость) Z = MY = U/I=\ Z | е'ф, например входное и выходное сопротивление
усилителя. Если цепь рассматривается как четырехполюсник, то его наибо­
лее важным показателем (помимо входного и выходного сопротивления)
является функция передачи, под которой понимают отношение комплексных
амплитуд интересующей реакции на выходе цепи к входному воздействию:
Р
-
Л
X
=
IY \ с №г-а-.у) - I
1*1
р
Iе М
В зависимости от размерностей выходной и входной величин различают
четыре вида комплексных функций передачи четырехполюсника: коэффици­
ентов передачи напряжения, тока, взаимной проводимости и сопротивления:
(14)
1 Х
м
где индекс 1 относится к входным величинам, индекс 2 — к выходным.
Проиллюстрируем особенности метода комплексных амплитуд на
примере конкретной цепи.
Параллельный колебательный контур. Такой тип колебательных
контуров используется в качестве избирательных систем в приемо­
передающих устройствах. Рассмотрим цепь с контуром (рис. 1,6), для
которой справедливы следующие уравнения:
(15)
I G + Ic + 1L = I — топологическое уравнение;
(16)
IG = GU,
/ г = усоСС/,
I L = U I joiL — компонентные уравнения.
Из системы уравнений (15), (16) находим
(17)
/ / jd)L
Y
G
Y
V
h = -
где
(18)
Y —G + jm C + 1/jw L = G + jB ( со).
Рис. 2. Зависимость реактивной
составляющей проводимости контура
от частоты
(19)
Таким образом, искомые величи­
ны (17) полностью определяются
комплексной проводимостью конту­
ра (18). Рассмотрим параметры кон­
тура, которые вводятся для оценки
его свойств вместо G, С, L.
Реактивная составляющая В(ю)
проводимости (18) зависит от часто­
ты. Характер ее изменения показан
на рис. 2. Частота, на которой реак­
тивная проводимость равна нулю,
называется резонансной частотой.
Из условия В( С0о) = 0 находим
O)0 = l/V Z С
Другим важным параметром является волновая проводимость (или
волновое сопротивление р), которая представляет собой проводимость
3-1881
емкостной или индуктивной ветви контура на резонансной частоте и с
учетом (19) выражается следующими соотношениями:
( 20)
Р ' =МоС :
co0L
V I'
И, наконец, третьим важным параметром контура является доброт­
ность, представляющая собой отношение реактивной проводимости к
активной на резонансной частоте:
( 21)
Q=^~
1
1
(o0LG
р G'
Как будет показано ниже, доб­
ротность показывает, во сколько раз
запасаемая в реактивных элементах
мощность
превышает
активную
мощность. При этом проводимость
G может отражать как мощность
потерь самого контура (неидеальность выполнения реактивных эле­
ментов), так и мощность, отбирае­
мую от контура во внешние цепи.
Опуская промежуточные выкладки,
запишем проводимость (18) через вве­
денные параметры в показательной
форме: У(/'со) = У(со) ехр /ф(со), где
(22) Г(со) = д/ 1 + 42; Ф(“ ) = arct8 А
Рис. 3. АЧХ и ФЧХ параллельного
контура
£ = g(0)/c0o - (Do/co) — обобщенная
расстройка.
При малых расстройках (со = со0)
2 (ю -со 0)
со0
со0
Частотная и фазовая характеристики контура в виде функций У(£) и
ф(с,) приведены на рис. 3. На рис. 4 проиллюстрирована зависимость ха­
рактера проводимости контура от частоты со и с помощью векторных
диаграмм показаны фазовые соотношения на разных частотах. Поскольку
векторные диаграммы дают наглядное представление о фазовых соотно­
шениях между токами и напряжениями и широко используются при ком­
плексном методе анализа цепей, поясним принцип их построения для
схемы на рис. 1,6, когда со > со0. На этих частотах проводимость контура
1
т
/
I
/
1
I
'
й'
^ \ Ф .
(0 —> 0
<0 < (Оо
(0 = Юо
С0 > с0о
Рис. 4. Характер проводимости и векторные диаграммы контура
на разных частотах
носит емкостной характер, так как соС > l/(toL). Поэтому напряжение
U на контуре отстает от тока / на угол ф (рис. 5). Под действием напря­
жения U через контур протекают токи, геометрическая сумма которых
должна удовлетворять равенству (15), при этом ток / 0. через прово­
димость совпадает по фазе с напряжени­
ем U , ток I L через индуктивность от­
стает на 90°, а ток / с через емкость
опережает на 90° от напряжения U . Ре­
зультирующий вектор после сложения
Iи >Л. >h- уравновешивается вектором 1
воздействующего тока. Путем измене­
ния ф в пределах -90°...+90° с помощью
рис. 5 можно проследить за изменением
Рис. 5. Принцип построения
фазовых соотношений между токами
векторной диаграммы
ветвей и напряжением на контуре в диа­
пазоне частот от 0 до
В качестве характеристик цепи на рис. 1,6 можно использовать пере­
даточные функции, представляющие собой отношение комплексных ам­
плитуд отклика и воздействия j = I :
Z- Л - 1;
/
Y
Кю
ю = Ыj
G.
Y’
к
,с
= ic_ = jwC_.
I
Y ’
к = 'h = _ 1
K IL = ^ = 11 I
jw L Y
В частности, модуль передаточной функции
позволяет суG
у /й Т 2
дить о частотных свойствах цепи. Наибольшей амплитуде U отклика напряже-
ния соответствует резонансная частота = 0), т.е. параллельный контур обла­
дает фильтрующими свойствами. Для оценки фильтрующих свойств служит
полоса пропускания контура, в которой передаточная функция |Z|/G > 1 /^ 2 .
Граничным частотам полосы пропускания соответствует обобщенная рас­
стройка = +1. Используя (23), получаем следующее выражение для оценки
2 А ®п
относительной полосы пропускания контура: +± --------=
—1
«о
Q
Таким образом, полоса пропускания определяется добротностью ко­
лебательного контура. По известной полосе пропускания и резонансной
частоте можно определить добротность.
3.2. Четырехполюсники
Многие устройства используются в качестве передаточных звеньев. Такие
устройства, имеющие два входных и два выходных зажима (полюса), в теории
цепей называются четырехполюсниками. Наиболее часто цель анализа состоит
в определении параметров, характеризующих четырехполюсник как переда­
точное звено как источник сигналов и как нагрузку. Традиционные методы
анализа путем составления и решения уравнений с использованием основных
законов электрических цепей может привести к неоправданным трудностям.
В теории четырехполюсников устанавливаются связи между входны­
ми и выходными токами и напряжениями независимо от его внутренней
структуры. Их использование во многих случаях существенно облегчает
и упрощает проведение анализа. Режим работы четырехполюсника
(рис. 1) полностью определен, если известны напряжения щ, и2 и токи г'ь
/2. Две из четырех величин рассматриваются как заданные воздействия на
цепь. Требуется найти отклики на воздействия, т.е. две оставшиеся вели­
чины. Помимо этого должны быть заданы также параметры четырехпо­
люсника. Рассмотрим вопрос выбора исходных данных для проведения
анализа линейных четырехполюсников комплексным методом.
h
1 /|
о
4-полю сник
О
2
-о
о I
1 и.
о
2
Рис. 1. Представление четырех­
полюсника с обозначениями
Рис. 2. Параметры двухполюсника (а)
и четырехполюсника (б)
Описание четырехполюсников. Для описания двухполюсника (рис. 2,а)
возможны два варианта:
=> воздействием служит ток I , параметром — сопротивление Z. В этом
случае откликом является напряжение U = Z I ;
=> воздействие — напряжение U , параметр — проводимость Y, а отклик —
ток i = Y -U.
В отличие от двухполюсника выбор воздействий (и откликов) для че­
тырехполюсника допускает шесть вариантов (табл. 1).
Таблица 1
Варианты
Воздействия
Отклики
Параметры
1
2
3
4
5
й„и2
UX, I 2
1»и2
/,./2
и 2 ,1 г
A’ L2
i\> v 2
0 tJ 2
и„и2
Y
G
н
Z
6
u „ i2
А
в
=> из них варианты 1—4 относятся к случаю, когда в качестве воздействия
(как и отклика) используется одна входная, другая — выходная величина;
=> в двух последних вариантах воздействиями и откликами являются
либо входные, либо выходные величины.
Уравнения четырехполюсника связывают каждый из откликов с двумя
величинами воздействия линейной зависимостью с помощью комплексных
коэффициентов, которые являются параметрами четырехполюсника. Для
варианта 1 комплексные амплитуды токов (отклика) можно представить как
линейную комбинацию амплитуд напряжений (воздействия):
(1)
/, = YuU l + Yl2U 2; j 2 = Y 2lU l + Y22U 2.
Входящие в (1) коэффициенты образуют систему Y-параметров, так
как имеют размерность проводимости. Их можно определить путем ко­
роткого замыкания зажимов четырехполюсника по переменному току:
FJ, = / , /С/, при U 2 = 0; К12 = / , / U 2 при С/, =0;
К,, = / 2 /С/, при U 2 = 0; Y22 = i 2 / U 2 при f), = 0.
Поэтому Y-параметры имеют смысл входной (Fu ), выходной (У22) и
взаимных (У|2, Y2\) проводимостей.
Для варианта 2 уравнения четырехполюсника записываются в виде:
(2)
/ , = е д + С 12/ 2; U2 = G 2lU l + G22i 2.
При этом коэффициенты G\\, G x2, G2l, G22, имеющие разную размер­
ность, образуют систему гибридных G-параметров, которые можно опре­
делить по способу холостого хода и короткого замыкания:
G,, = / , /С/, при / 2 = 0; G12= / , / / 2 npH U t = 0;
G2, = С/ 2 /С/, при / 2 = 0; G22 = U2II2 при С/, = 0.
Таким образом, коэффициент G u представляет собой входную прово­
димость, а коэффициент G2i — коэффициент передачи напряжения четы­
рехполюсника в режиме короткого замыкания выходных зажимов 2- 2 ;
коэффициент G?2 — выходную сопротивление, a G |2 — коэффициент
передачи тока со стороны выходных зажимов 2 -2 при разомкнутых
входных зажимах 1- 1.
Взаимосвязи между параметрами четырехполюсников. Выразим
Y-параметры через G-параметры. Для этого из второго уравнения системы (2)
определим ток / 2 и подставим в первое уравнение. В итоге получим соотношения
(3)
i 2 = - £ L u i + - ± - U 2;
22
i x= °
U l + ^ U 2.
^2 2
< J 22
22
Приравняв коэффициенты при U ],U 2 систем (1) и (3), находим
у
_ G 1\G 22 ~
.
M l
~
>
„
22
Y
— G ]l ■
12
’
^
22
Y
—
21 ~
G l] ■
^
’
22
У
——
22
22
Подобные взаимосвязи, существующие между параметрами всех шес­
ти разновидностей четырехполюсников, приведены в табл. 2 .
В дальнейшем будем использовать Y-параметры.
Основные характеристики четырехполюсника. Определим коэффициен­
ты передачи напряжения и тока, а также входную и выходную проводимости.
Разделив обе части второго уравнения системы (1) на U 2 и приняв во
внимание, что YK = ~ / 2 / U 2 из-за выбранного направления тока / 2
(рис. 2,6), можно получить следующее соотношение для коэффициента
передачи по напряжению:
(4)
К ц = Й - 2- = ----- .
U
Y +Y
U \
J 22 ^
Разделив второе уравнение системы (1) на первое, получим после преоб­
разований с учетом (4) выражение для коэффициента передачи по току:
Таблица 2
«ч 59
<N
“ 05
05 ^ 5
ОЭ од
1 1
05
--«.
П
оа
S.
59
<N 59 59
05
я
0Q
ад од
1
= =4
=
59
rj
1
<N _
5a.
5
”1 CQ to
CQ % to"
~—.
n
О<ДN од- ОД
“
5
1
С
Ч f(4
S
ГЧ
3 Jr
is^
^
=
1 ^
fN ^
(N
CN L ^ —
ттГ>-l r<-lN
^ 5
(N
^ T
^
1
1
ОД
^
<4 ГЧ
os'
i Q5 oa‘
05
'~--, 05 eq
<N
ep
й гм
<4 —
N
N N
N
f !
S
§
if ^
I rs i —
*
S' af
=5
^ £
5 г£
J
tvj NJ
П—
(“■!
Я £5
s
N
^
'Y
S? s«
(N M
Я
*1 *=
^
s?
о
о
<N <N "^N
fS ^
<5 я o 61 t j о
я О
^ "я o 6 1 i l
"я о
5 7
О i
rN <N
iC
tC
—
<N "s.
— ~2 5Г
x .Я ^ —
Я
U =
^
>
П ГЧ
N ts ‘
*r
a
ri
^
<N
'Ч
~
X
5;
^
7
5Г-М'—
Ж
S_ jsi
N
СЧ
£j N
PT ■=
I ^
Ё?
N"
_ —
N
^ri
ts —
s? ^
5
sc 5
^ 1
?1 -<4
i f
-
r-l
^ <*
f
Г?
О ОЯ
(N РЧ
^ iC
<N
“<N X
^ <N
■= 5
^ —
<N
. frS
-j . С
Ч
г N
?
ГЧ SJ
N 1
J
1
ЙЧ
<
N <N
—
s?
<5 (5 oД 5
S3
о
fГ4
Ч—
451 !£ О ™
? ? О "Z — o'
гч
О ^
= u
о ^
^5
's
5
О
- о - о
i 1
— §1 57
ST =^
'Л ^
tc 1
N
V. ^
T x:
rj r.
X, ^
Й >?
>? к'4
- 1 Ss M
СГ
ri
•*
<
~=
. --^ ST ^ K"
1 —
1 T"
<
CD
€
St
1
St
зГ
£
&
2
я
яс
<
L>
S
X
ят
<и
5S
Cl
С
о.
Первое уравнение системы (1) позволяет найти входную проводи­
мость четырехполюсника, выражение для которой с учетом (4) можно
записать в виде
(7)
_ A
Y„ =и,
(8)
Yt
У22+Ун
^ 2 + ^,
Выходную проводимость четырехполюсника можно определить как
отношение выходного тока короткого замыкания к выходному напряже­
нию холостого хода или как входную проводимость со стороны выход­
ных зажимов четырехполюсника при подключении к входным зажимам
внутренней проводимости Уист источника сигналов:
Д
.- у _
1 22
№
Y u+Ym
УцУт + \ г \
Yu +YmT
Управляемые источники. В отличие от независимого двухполюсно­
го источника управляемый, или зависимый, источник представляют че­
тырехполюсником, в котором входная цепь служит для управления на­
пряжением или током источника, включенного в выходную цепь. Разли­
чают четыре типа управляемых источников (рис. 3):
=> источник тока, управляемый напряжением (ИТУН), в котором управляю­
щей величиной является напряжение С/,, подаваемое на зажимы 1-1 четы­
рехполюсника (рис. 3,а). Входная цепь разомкнута, ее сопротивление беско­
нечно велико, входной ток равен нулю; выходная цепь является источником
тока, величина которого пропорциональна входному напряжению, т.е.
/ 2 = 0; / 2 = В Д ,
где Y2\ — передаточная проводимость.
2
>-----
К2,£ /|(^ Г
c 2iu , (
)------
а)
'1
-о<
\и г
------ 1
б)
)
я 21/, т
/,
»
------ 1
z 2, / , (
)
U
<
>
в)
)
г)
Рис. 3. Управляемые источники: источник тока, управляемый напряжением (а);
источник напряжения, управляемый напряжением (б); источник тока, управляе­
мый током (в); источник напряжения, управляемый током (г)
Управляемый источник типа ИТУН можно рассматривать как част­
ный случай У-четырехполюсника с параметрами У, | = Yn = У22 = 0. При
моделировании усилителей параметр У21 представляет собой крутизну
проходной характеристики транзистора;
=> источник напряжения, управляемый напряжением (ИНУН), в кото­
ром управляющей величиной является напряжение С/,, подаваемое на
зажимы 1-1 четырехполюсника (рис. 3,6). Входной ток равен нулю,
поскольку цепь разомкнута; выходная цепь является источником, на­
пряжение которого пропорционально входному напряжению. Уравне­
ния для ИНУН имеют вид
0 2 = 0;
U2 = G2lt / , ,
где G21 — коэффициент передачи напряжения. Таким образом, ИНУН
можно рассматривать как частный случай G-четырехполюсника с па­
раметрами Gп = G |2 = G22 = 0. Его часто используют в качестве иде­
альной модели усилителей, например операционного усилителя;
=> источник тока, управляемый током (ИТУТ), в котором управляющей вели­
чиной является входной ток /, (рис. 3,в). Зажимы 1-1 внутри четырехполюс­
ника замкнуты, поэтому входное напряжение равно нулю. Выходная цепь
представляет собой источник тока, величина которого пропорциональна
входному току. Следовательно, система уравнений для ИТУТ имеет вид
t> ,= 0 ; / 2 = Я 2,У,,
где Н21— коэффициент передачи (усиления) тока. Этот тип источника мож­
но рассматривать как частный случай //-четырехполюсника с параметрами
Н\\ ~Н \2 = Н22 = 0. Он является моделью идеального усилителя тока;
=> источник напряжения, управляемый током (ИНУТ), в котором
управляющей величиной является ток /, короткозамкнутой входной
цепи четырехполюсника (рис. 3,г). Входное напряжение и сопротив­
ление источника равны нулю. Выходная цепь является источником
напряжения. Поэтому ИНУТ описывается системой уравнений
^1=0;
t / 2 = Z 2, / , ,
где Z2| — передаточное сопротивление. Управляемый источник типа
ИНУТ можно рассматривать как частный случай Z-четырехполюсника с параметрами Z u = Z l2= Z22 = 0.
Изменив обозначения (полюсов, индексов напряжений и токов, ин­
дексов параметров четырехполюсников), можно получить источники,
управляемые со стороны выходных зажимов. Управляемые источники
входят в состав минимального набора базовых элементов и используются
ниже в схемах замещения четырехполюсников.
Схемы замещения четырехполюсников. Для составления схемы за­
мещения, или эквивалентной схемы, четырехполюсника с Y-параметрами
воспользуемся его уравнениями ( 1), из которых следует, что входной и
выходной токи содержат две составляющих, одна из которых создается
напряжением (У,, другая — напряжением U 2, при этом:
=> составляющие токов YnU {, Y22U 2 можно рассматривать как отклики
при воздействии входного и выходного напряжения на двухполюсни­
ки Y\\, Y22, подключенные соответственно к входным 1-1 и выходным
2 - 2 зажимам четырехполюсника;
=> составляющие токов Yl2U 2,Y 2]U l можно рассматривать как источни­
ки, управляемые со стороны выходных 2 - 2 и входных 1-1 зажимов
соответственно.
На рис. 4 ,а приведена схема замещения Y-четырехполюсника, состав­
ленная в соответствии с изложенным выше принципом. На рис. А,б,в,г
приведены схемы G-, Н- и Z-четырехполюсников, а также описывающие
их уравнения.
G-параметры
Y-параметры
о1 /,
h |
Gj2_ /■> 2
1 /,
-о
о-
^ч ^1 YnUi (^ )
ф
^
2
||| Y22
172
С/, | Си
G n [|l
I 1 Gnh
G n h (^
W ))
^.
h=YnUt+YnU:
/2= Y2IU,+ Y22U2
& 2=
+ G12/2
______
U, =
+ HI2U2
% 2
/2= Я 21/| + Я 22С/2
в)
1+
G jjI i
Z-параметры
ф я 2|/,
h
2.
1
6)
а)
1 /1 Ни
|I U2
. . . .
1\ = G \\ U \
Н-параметры
о—•>
U
21U,
( ) ;GC 2if/|
1 /,
Zn
\
2tj\ Q
o^2
^22
0 Z 21/
/-> 2
-4 — 0
I
t/2= z2,/, +z22/2
U, = ZuU + Z K2l2
г)
Рис. 4. Схемы замещения четырехполюсников и их описание
Пассивные элементы схем замещения отражают потери в четырехпо­
люснике, а источники — возможность усиления мощности. При этом с
помощью источника в выходной цепи моделируется полезный эффект
усиления, а с помощью источника во входной цепи — паразитный эф­
фект передачи мощности из выходной цепи, приводящей к возможному
самовозбуждению четырехполюсника.
Отметим, что при моделировании транзисторов широко применяются
П- и Т-образные схемы замещения (рис. 5), четыре параметра которых от-
ражают их топологические и физические особенности. Устанавливается
связь физических параметров транзистора с параметрами выбранного типа
четырехполюсника, после чего проводится анализ схемы известными из
теории четырехполюсников методами. Для выявления взаимосвязи пара­
метров схемы замещения на рис. 5,а с параметрами Y-четырехполюсника
составляется система уравнений:
(9)
/, =(У, +Г 2 )С/,- r 2t/ 2; / 2 = ( r 4 - r 2)[/,+ (y 2 + y 3)t/2.
Сопоставив коэффициенты при С/, и U 2 в выражениях (1) и (9), получим
2
1
2
Рис. 5. П- и Т-образные схемы замещения транзисторов
Свойства пассивных и активны х четырехполю сников. Отличи­
тельная особенность пассивных четырехполюсников состоит в том, что:
=> для их описания используется три параметра, поскольку Yn = У2й
=> они не усиливают мощность.
Следует выделить два фундаментальных свойства, которые отличают
активные цепи от пассивных:
=> активные цепи являются необратимыми, поскольку основной поток
энергии имеет одностороннюю направленность (обычно от входа к
выходу). Поэтому матрицы узловых проводимостей и контурных со­
противлений активных цепей имеют несимметричную структуру;
=> для активной цепи существует проблема устойчивости (см. п. 8 .8 ). Цепь
устойчива, если при любых начальных условиях свободные колебания,
возникающие в момент приложения воздействия, остаются ограничен­
ными или со временем затухают. Неустойчивость состояния линейной
цепи приводит к неограниченному нарастанию собственных колебаний, в
результате чего цепь перестает выполнять предназначенные ей функции.
В нелинейных цепях неустойчивость состояния используется в полезных
целях — для генерирования колебаний различной формы.
Составные четырехполюсники. Составной четырехполюсник обра­
зуется путем соединения двух и более четырехполюсников. Типовые
схемы соединения двух четырехполюсников приведены на рис. 6 . Рас­
смотрим их особенности и определим для каждого способа соединения
параметры составного четырехполюсника.
При параллельном соединении входные 1-1 и выходные 2-2 зажимы
обоих четырехполюсников соединяются друг с другом (рис. 6,а). Для этого
способа соединения выполняются следующие топологические уравнения:
(10)
/ 2 = / '2+ /"2; и , = 0 \ = и ' \ ;
U 2 = U '2 = U"2 ;
Если выбрать четырехполюсники с Y-параметрами, для которых ком­
понентные уравнения имеют вид
(11)
= У',, U \+ Y \ 2 й '2; Г 2 = У'2, U \ + r 22 U '2;
т)" 4*уи12 л
+ /у н22 и" 2 ’
1/" 1= 1у™\ \ и
U" 2’• 1/" 2 = 1У"21 и" 1+
то составной четырехполюсник с учетом ( 10 ), ( 11 ) описывается следую­
щими соотношениями
(12)
/, = (Y 'u +Y"u )U l + ( Y \2+ Y '\2 )U 2 = У ,Д + У |2£/2;
i 2 = (У'2,+У"2, )с /.+ (У'22+У"22 ) и 2 = у2Д + у 22 t / 2.
Рис. 6. Типовые схемы составных четырехполюсников
Из (12) следует важный вывод: при параллельном соединении четы­
рехполюсников целесообразно использовать Y-параметры. В этом случае
параметры составного четырехполюсника определяются как сумма пара­
метров исходных четырехполюсников.
|
На рис. 6,б,в,г приведены другие типовые схемы соединения четырех­
полюсников, сумма параметров которых определяет параметры составно­
го четырехполюсника.
При каскадном соединении четырехполюсников выбор исходных четы­
рехполюсников с параметрами А позволяет получить матрицу параметров
составного четырехполюсника в виде произведения матриц параметров эле­
ментарных четырехполюсников:
лА' 12
'А'п
_Л21
Л22_
А'
лА"и
X
Л"
21
Л 22.
В других случаях параметры составного четырехполюсника определяются пу­
тем анализа схемы. В качестве примера определим эквивалентные У-параметры
цепочечного соединения двух четырехполюсников с У-параметрами (рис. 7,а).
.А'21
Л 22 ^
Л =/2
Л
/2
Y
Y'
/,
П—^
if2\ui
jbi
Л
Y
------ 0—0-----а)
б)
Рис. 7. Каскадное соединение четырехполюсников
Составим уравнения для первого и второго четырехполюсников цепо­
чечной схемы с учетом того, ч то / ' 2 = /" ,; U'2 = U'\ :
(13)
/, = Y'l l U l + Y 't2U'2;
(14)
i ' 2 = Y'2lUl + Y '22 U'2;
(15)
- V 2 = У"п U'2+Y’\ 2U2;
(16)
i 2 =Y"2lU'2+Y"22U 2.
Сложим уравнения (14) и (15). Из полученного соотношения найдем U'2 :
11 2 .
1Y ’21I I 1 +
^ 1Y " 12 и
Ц1 _
Y'
2
11
+ Y"
’
22
Подставив U'2 в уравнения (13), (16), сведем систему уравнений к ви­
ду ( 1), и после сопоставления коэффициентов получим:
у
—
Y'
11
Y"
у»
4
+ I Y' I
11Т 11 I
_ум
у
’
12
Y'
—
у,
1 ll"t_i 22
у
у»
;
_1_ у и
11t ;
12
ум
»
1V'22 1Y"22 -ИI 1У"1I
у
’
22
У"
1 И*1"7 22
1Y'21 1К"21
21
I2
22
у,
1
, уи
и '* '1
22
где \Г\ = Г ПГ 22 - Г 12Г 21; |Г | = У"ПУ"22 - Г | 2У"21.
Составные четырехполюсники используются для выявления влияния
обратных связей на показатели усилителей (см. п. 9.3).
3.3. Индуктивно связанные цепи
Основные понятия и соотношения. При протекании тока i через провод­
ник 1-1 вокруг него создается магнитное поле, которое на рис. 1,а представ­
лено в виде концентрических окружностей, отображающих магнитный по­
ток Ф. Направление магнитных линий потока совпадает с направлением
вращения правоходового винта (правило буравчика). При изменении потока
согласно закону индукции на концах проводника наводится ЭДС самоиндук­
ции е = --с/Ф/dt, положительное направление которой совпадает с током. Если
на некотором удалении поместить другой проводник 2 -2 (рис. 1,6), то на его
концах будет наводиться ЭДС взаимной индукции вг\ - - Ф2 \ldt, обусловлен­
ная частью магнитного потока от первого провода.
Рис. 1. Проводник с током (а) и явление самоиндукции (б)
На практике вместо прямого провода используют витую конструк­
цию, называемую катушкой (или обмоткой). Протекающий по катушке
ток / (рис. 2,а) создает вокруг витков магнитное поле, имеющее в общем
случае сложную конфигурацию. Однако для оценки свойств катушки не
стремятся выявить полную картину распределения поля, а используют
потокосцепление \|/, представляющее собой усредненный магнитный по­
ток, который охватывает все витки катушки (\(/ = шФ). Направление маг­
нитных линий потокосцепления также определяется по правилу буравчи­
ка и зависит от направления намотки витков и направления протекающе­
го тока. Если вращать буравчик по направлению тока, то его поступа­
тельное движение укажет направление потокосцепления внутри катушки.
Отношение потокосцепления катушки к протекающему в ней току назы­
вают индуктивностью (L = и Ф/7).
/ /
а)
б)
Рис. 2. Катушки с током: структура магнитного поля одной катушки (а); явление
взаимной индукции (б); структура магнитного поля двух катушек (в)
Рассмотрим теперь две близко расположенные катушки. При протекании
тока i\ через одну (активную) катушку только часть создаваемого магнитного
потока Ф21 будет пронизывать витки другой (пассивной) катушки и возбуж­
дать в ней ЭДС взаимной индукции е2\ = -иы/ФгЛЛ (рис. 2,6). Отношение
потокосцепления пассивной катушки к току активной называется взаимной
индуктивностью (М2\ = м>2Фг\Н\). Пассивная катушка не влияет на активную,
поэтому ее индуктивность L\ определяется отношением и^Ф,//,.
При протекании токов через обе катушки к собственному потоку каждой ка­
тушки добавляется поток, создаваемый другой катушкой (рис. 2,в). В зависимо­
сти от направлений намотки витков катушек и направлений протекающих через
них токов добавляемый поток может либо увеличивать, либо уменьшать собст­
венный поток катушки. Полные индуктивности катушек определяются отноше­
нием результирующего потокосцепления к протекающему току:
(1)
i n = и>,(Фи + Ф2| ± Ф | 2)/*1 = L\ ± М \2 i2/h;
Z,i£ ~ W2(Ф 22 + Ф 12 i ^ 2l)/f*2 = ^2
М]2 ^ Мц /] //2,
где Фц, Ф22 — магнитные потоки рассеяния катушек 1 и 2; Ф2Ь Ф 12 —
общие потоки катушек (потоки взаимной индукции); Ф и + ф 21 = Ф,; Ф 22 +
+ ф 12= Ф2— потоки самоиндукции; L l,L 2 — собственные индуктивности
катушек; Mi2, М2\ — взаимные индуктивности. Приведенному на рис. 2,в
случаю соответствует знак «-» в выражении ( 1).
Коэффициент связи. Этот показатель используется для оценки степени
индуктивной связи двух катушек и выражается следующими отношениями:
(2 )
(2)
k=
VФ 1
Ф2
/ М 2171 W2 M n h Wl
W, L2i 2
V W2 Z,,/,
где Ф |,Ф 2 — полные потоки катушек 1 и 2.
т
Для повышения коэффициента связи используется бифилярный способ
намотки катушек (рис. 3,а). При перпендикулярном расположении осей ка­
тушек (рис. 3,6) коэффициент связи обращается в нуль. Поэтому, разворачи­
вая одну катушку относительно другой, можно плавно изменять коэффици­
ент связи в широких пределах. При последовательном соединении двух ка­
тушек изменение их взаимного расположения изменяет результирующую
индуктивность. Такие устройства называют вариометрами.
Рис. 3. Взаимодействие полей двух катушек: сложение полей
при бифилярном способе намотки (а); отсутствие взаимодействия
при ортогональном расположении обмоток (б)
Передаточные свойства индуктивно связанны х катушек. Рассмот­
рим свойства двух катушек как передаточного звена, для чего к первой
катушке подведем гармоническое напряжение, а ко второй подключим
сопротивление (рис. 4 ,а). Для описания полученного линейного четырех­
полюсника воспользуемся Z-параметрами:
(3)
U t = Z ni x + Z UI 2 = y'coZ,, /, + у м М /2;
U 2 = Z 21/, + Z 22i 2 = у'соМ/, + j(oL2 12,
где
ycoZ,, = Z „ = Hi
A i2=о
./ojA/ji —^21 — 4 i
u,
jo iM X2 —Z 12 —-
j(aL2
7 22 =
u,
A i2=о
при этом Li, L2 — собственные индуктивности катушек; M = М \2 = М2\ —
взаимная индуктивность, так как в линейных пассивных цепях Z X2 = Z2
Системе уравнений (3) соответствует схема замещения, приведенная
на рис. 4,6. В этом можно убедиться, если для ее описания использовать
закон Кирхгофа для токов.
Выражения основных показателей четырехполюсника (дуальные по
отношению к полученным в параграфе 2.2 для Y-параметров) имеют вид
<4)
K ,= - - Z f - =22 + 2 Н
к,и
;
7 tt)Z,2 + Zh
/соЛ/ 2
Z 2\
^11 + ( ^ 11^22
ZBX = Z„ -
Zl2Z 2l) / Z H
Z2,Z|2
Z 22 + Z H
= 7 ш1, + m 2M ]2M 2]
' уш ^+ Z /
z Bblx = z 22 —
Z\
= y oi , +
+ZM
CT
-
./CO/.,
¥.2^ " ''N 11/21
/ • />V
/*Л' “'\V \ • /2
1--- су-л \ / rW:i^------ *-
ВрЦ сЩ
—
%
jwL) —ш2(LtL2 —М 2) / Z H
/,
«I
u,\
Ш
+Z„C,
ii-w
l 2- m
i2
|<у2
m!
6)
Рис. 4. Передаточное звено в виде индуктивно связанных катушек (а)
и его схема замещения (б)
Из соотношений (4) следует, что
=> п р и т о к , = - * f r - = *>?**
7* .
=
~
/ 2 И/21Ф22 + Ф 12У W2®i2
W2
ZBS = ytoZ., (1 - Л:2);
=> при ZH-> 00 ^ = 0 ; K v =
= —|Ф -21
/2
^ = 0;
^ . .= :A = ^L .
^ ,(Ф П + Ф 21) / 2 w,
Последовательное соединение двух катуш ек. Индуктивность двух
последовательно соединенных катушек равна отношению суммарного
потокосцепления к протекающему току: Lz = (wi Ф 1 + wj^>2)li. Напомним,
что положительное направление потока относительно создающего его
тока определяется по правилу буравчика (правоходового винта).
Различают два способа последовательного соединения катушек:
=> согласное соединение, при котором направления магнитных потоков
самоиндукции и взаимной индукции в катушках совпадают;
встречное соединение, при котором магнитные потоки самоиндукции
и взаимной индукции имеют противоположные направления.
На рис. 5,а и б соответственно показаны согласный и встречный спо­
собы соединения двух катушек с одинаковым направлением намотки
витков, а на рис. 5,в и г — катушек с противоположным направлением
намотки витков. Точкой на схемах обозначено начало обмотки. При со­
гласном соединении результирующая индуктивность L = L x + L2 + 2М,
при встречном — L = L\ + L2 — 2М, где М — взаимная индуктивность,
поскольку согласно принципу взаимности М\2 = М2\ = М.
Рис. 5. Согласное и встречное соединение двух катушек: с одинаковым
направлением намотки витков (а, б), с противоположным направлением
намотки витков (в, г)
3.4. Магнитные цепи
Общие сведения. Магнитное поле характеризуется двумя основными
векторными величинами: индукцией В и напряженностью Н. Между ни­
ми существует следующая связь: В = (ЛоЦот„Н, где Цо — магнитная прони­
цаемость вакуума; цотн — относительная магнитная проницаемость.
В дальнейшем векторные величины напряженности и индукции будем
обозначать прописными буквами В и Н, а мгновенные — строчными бук­
вами Ъ и h.
Величина |1 используется для оценки магнитных свойств веществ. По
магнитным свойствам все вещества (материалы) делятся на две группы:
=> неферромагнитные вещества, для которых (10ТН= 1 ;
=> ферромагнитные вещества, магнитная проницаемость которых Ц(ггн» 1.
Магнитные свойства вещества объясняются с помощью вектора на­
магниченности, обусловленного его кристаллической структурой и нали­
чием внутренних упругих напряжений. В обычных условиях векторы
намагниченности направлены в разные стороны и магнитные свойства не
проявляются. Если вещество поместить во внешнее магнитное поле, то
векторы намагниченности, ориентируясь вдоль поля, увеличивают ин­
дукцию вещества в десятки и сотни тысяч раз.
Для характеристики свойств ферромагнитных веществ (или материа­
лов) используют зависимость мгновенных значений индукции b от на­
пряженности И магнитного поля, снятую при периодическом воздейст­
вии. Зависимость b = F(h) называется кривой намагничивания и имеет
форму гистерезисной петли (рис. 1), что свидетельствует о наличии по­
терь. Ферромагнитные материалы разделяются на две группы:
=> магнитно-мягкие материалы (железо, стали и их сплавы, ферриты
и др.), кривая намагничивания которых (рис. 1,в и б) имеет ярко вы­
раженный нелинейный характер и сравнительно малую площадь гистерезисной петли. Они находят широкое применение в различных
электротехнических и электронных устройствах;
а)
6)
в)
Рис. I. Гистерезисные петли магнитно-мягких (а )
и магнитно-жестких (б) материалов
=> магнитно-жесткие материалы (углеродистые стали; вольфрамовые,
платинокобальтовые сплавы и др.), кривая намагничивания которых
(рис. \,в) имеет пологие участки и широкую петлю гистерезиса с
большой площадью. Из них изготавливают постоянные магниты.
Особенности магнитных цепей. Магнитной цепью называют конст­
рукцию на основе ферромагнитного материала, предназначенную для
создания магнитных полей заданной конфигурации и интенсивности.
Примером простейших магнитных цепей являются кольцевые (торои­
дальные) и трехстержневые магнитопроводы (рис. 2,а, б). Магнитная
цепь, используемая в измерительных приборах, приведена на рис. 2,в.
Она состоит из постоянного магнита и подвижной катушки, расположен­
ной на ферромагнитном цилиндре. При протекании через катушку посто­
янного тока создается вращающий момент, что вызывает поворот цилин­
дра на определенный угол. Более сложную магнитную цепь имеют гене­
раторы и электродвигатели. По топологическому признаку различают
неразветвленные (рис. 2,а) и разветвленные (рис. 2 ,6 ) магнитные цепи.
Магнитное поле создается (возбуждается) катушкой с током (рис. 2,а, б )
или постоянным магнитом (рис. 2 , в).
Если через провод пропустить постоянный ток, то вокруг него созда­
ется постоянное магнитное поле, которое можно представить в виде не­
прерывных магнитных линий вектора индукции В. Совокупность линий
образует магнитный поток Ф. Если провод разместить на магнитопроводе
в виде обмотки (катушки), то основной поток, создаваемый каждым ее
витком, будет циркулировать по магнитопроводу. Результирующий по­
ток, создаваемый всеми витками w обмотки, называется потокосцеплением. при этом \|/ =
= L i, где L — индуктивность катушки; i — про­
текающий через нее ток; Ф* = BS; S — площадь сечения магнитопровода.
«)
Рис. 2. Простейшие магнитные цепи:
в виде тороидального (о) и трехстержневого (б) магнитопровода;
цепь из постоянного магнита и подвижной катушки,
расположенной на ферромагнитном цилиндре (в)
Магнитодвижущей силой (МДС) катушки с током называют произве­
дение числа витков на протекающий по ней ток: F = wl. Если в электри­
ческой цепи ЭДС создает ток, то в магнитной цепи МДС вызывает маг­
нитный поток. Положительное направление МДС определяется по на­
правлению движения часовой стрелки (правило буравчика).
Закон полного тока. Этот закон устанавливает количественную связь
между напряженностью магнитного поля и токами: линейный интеграл
от вектора напряженности магнитного поля вдоль любого замкнутого
контура равен алгебраической сумме токов, охваченных этим контуром:
ijHdl = У"1. Линейный интеграл между двумя точками а и b магнитной
ь
цепи называют падением магнитного напряжения: U(l/J = jH d l. Если на
а
этом участке вектор Н совпадает по направлению с элементом пути dl и
значение напряженности магнитного поля равно Н = const, то магнитное
напряжение Ua* = H U , где U — длина участка. Если участок ab содержит
N элементарных участков, на каждом из которых напряженность постоN
янна и равна Н„, то U ah = Х Н „1Я, где 1п — длина и-го участка.
п=I
Законы Кирхгофа для магнитных цепей. Согласно первому закону ал­
гебраическая сумма потоков в узле равна нулю:
=
П° второму за­
к
кону алгебраическая сумма падений магнитного напряжения вдоль замкну­
того контура равна алгебраической сумме МДС: 'Yj U к = ^ I kwk = 0 . Вто­
к
к
рой закон по своей сути является частным случаем закона полного тока.
Перед составлением уравнений для магнитной цепи выбираются по­
ложительные направления потоков и обхода контуров. Если направления
магнитного потока и МДС совпадают с направлением обхода, указанные
величины входят в уравнение со знаком плюс, в противном случае —
указывается знак минус.
Цель анализа — определение магнитного потока или МДС магнитной
цепи.
Таким образом, если для электрических цепей основными величинами
являются ток и напряжения, то для магнитных цепей таковыми служат
магнитный поток и магнитодвижущая сила (МДС).
3.5. Трансформаторы
Общие сведения. Трансформатором называют электромагнитное устрой­
ство, предназначенное для изменения амплитуды воздействующего (чаще
всего гармонического) колебания. Трансформатор содержит две (и более)
обмотки, размещенные на общем магнитопроводе (рис. 1). Обмотка, на
которую подается входное колебание, называется первичной, а обмотка, с
которой снимаемся выходное колебание, — вторичной. Со стороны пер­
вичной обмотки, содержащей W] витков, трансформатор является прием­
ником входных колебаний от внешнего источника, а со стороны вторичной
обмотки, содержащей w2 витков, — источником колебаний.
е
О
Рис. 1. Изображение трансформатора с подключенными источником
и нагрузкой (а) и его условное графическое обозначение (6)
Возможны следующие режимы работы трансформаторов [18]:
=> рабочий режим, при котором напряжение первичной обмотки близко
к номинальному значению, а ток вторичной обмотки не превышает
номинального значения;
=> режим холостого хода, при котором цепь вторичной обмотки разомкну­
та или подключена к нагрузке с очень большим сопротивлением;
=> режим короткого замыкания трансформатора, при котором его вто­
ричная обмотка коротко замкнута или подключена к нагрузке с малым
сопротивлением нагрузки.
Режимы холостого хода и короткого замыкания специально создаются
при испытании силовых трансформаторов.
Принцип действия трансформатора базируется на явлении элек­
тромагнитной индукции, суть которого состоит в том, что изменение
магнитного потока, пронизывающего контур, возбуждает (индуцирует) в
нем ЭДС. Это явление обратимое: подводимое к контуру напряжение
создает магнитный поток.
При подключении источника напряжения щ в первичной обмотке возни­
кает ток i\. Магнитодвижущая сила i\W\ создает в магнитопроводе магнит­
ный поток. Его положительное направление определяется по правилу бурав­
чика. Магнитный поток индуцирует во вторичной обмотке ЭДС взаимной
индукции е2, под действием которой через сопротивление нагрузки R2 начи­
нает протекать ток i2. Первичная и вторичная обмотки трансформатора
включены встречно, что условно обозначается разметкой выводов обмоток,
как на рис. 1,6. Поэтому МДС i2w2, вызванная током вторичной обмотки,
создает в магнитопроводе поток, направленный навстречу магнитному пото­
ку от действия МДС i\W\. Результирующий магнитный поток Ф создается
совместным действием МДС первичной и вторичной обмоток i\W\ - i2w2.
На рис. 1,б показано условное графическое обозначение трансформа­
тора с подключенными источником и нагрузкой.
Модели трансформатора. Построим модель идеализированного
трансформатора, полагая, что:
=> магнитопровод выполнен из ферромагнитного материала с линейной
зависимостью индукции от напряженности магнитного поля Ъ = |1/г;
=> площадь поперечного сечения магнитопровода равна S, длина линии
магнитного потока соответствует средней длине магнитопровода /;
=> магнитное поле в магнитопроводе является однородным, весь поток
замыкается через магнитопровод;
=> подводимое от внешнего источника напряжение изменяется по гармо­
ническому закону.
Для описания трансформатора воспользуемся комплексным методом.
На основании закона полного тока выразим напряженность магнитно­
го поля через токи первичной и вторичной обмоток:
( 1)
н— W
]~
Wl
I
По закону электромагнитной индукции ЭДС, индуктируемые в пер­
вичной и вторичной обмотках магнитным потоком, имеют вид
(2)
Еп = -/ши>лФ = - j a m nBS = -j(o w n[iHS = - у соwn| i - ' W]
S ,
где n = 1, 2; B , H — комплексные амплитуды индукции и напряженности
магнитного поля.
Учитывая (2), запишем выражения для амплитуд напряжений на пер­
вичной и вторичной обмотках
гг
г
■
„
Л,
t/, = - Е | = усои>,Ф = ,aw ,|a-L -!-s - 7 t0 W||a - y ^ - 5 ;
^ 2 = z J i =yww 20 .
И з (3) находим
(4)
U] = U 2/n = ^ ~ ,
n
где n = vv2/h’i — коэффициент трансформации идеализированного транс­
форматора.
Определив из (4) / , =
/
(5)
U,
_ \
ZJn
и подставив в первое уравнение (3), получим
7
. . ;
,
w^fjS
ywZ,, / , , где I , =■ ^
I
Из соотношения (5) находим входную проводимость идеализирован­
ного трансформатора
(' 6 )'
_
YВХ = А
+1 —
!_
г\- = — L_
,
^
, л
i/,
ymZ, ZH/ п
*
Соотношение (6 ) соответствует схеме замещения трансформатора, пред­
ставленной на рис. 2,а. При разомкнутой вторичной обмотке (Z„ = 0) транс­
форматор превращается в катушку с индуктивностью L\. Если проницаемость
Ц —> °°, то индуктивное сопротивление coLi » ZJrT становится бесконечно
большим и входное сопротивление 1/FBX= ZJn2. В этом случае трансформатор
становится идеальным средством согласования источника колебаний с нагруз­
кой, поскольку без потерь мощности позволяет получить значение входного
сопротивления RJn2, равное внутреннему сопротивлению источника.
R,
а)
Z-p,
V «2 Яз/л2
б)
Рис. 2. Схема замещения идеального (о)
и реального (б) трансформатора
Схема замещения реального трансформатора приведена на рис. 2,6.
В нее дополнительно введены:
=> G — проводимость, которая учитывает усредненные потери в магнитопро­
воде. Их можно оценить по площади динамической петли гистерезиса;
=> R\, R 'и = RJn2 — активные сопротивления, отражающие потери мощ­
ности в первичной и вторичной обмотках;
=> Lp], L р2 = Lpjln1 — индуктивности рассеяния, учитывающие то обстоя­
тельство, что часть потока не попадает в магнитопровод.
3.6. Трехфазные цепи
Общие сведения. Многофазной электрической цепью называют совокупность
нескольких цепей, в которых воздействием являются напряжения (ЭДС) оди­
наковой частоты с определенным временным сдвигом. Особую роль в элек­
тротехнике играют цепи с источниками трехфазного гармонического напря­
жения промышленной частоты 50 Гц. На рис. 1 приведены временные зависи­
мости мгновенных значений и векторная диаграмма симметричной трехфаз­
ной системы напряжений, обладающей следующими свойствами:
=> все напряжения равны по амплитуде и сдвинуты относительно друг
друга на угол 2 я /3 = 120 ° по фазе, или на треть периода по времени;
=> сумма напряжений в любой момент времени равна нулю.
Симметричную трехфазную систему напряжений можно получить с по­
мощью трех идентичных катушек (рамок А-А', В-В', С-С'), если их развернуть
на 120° и поместить в магнитное поле, как показано на рис. 2,а. При вращении
катушек магнитные силовые линии, пересекая последовательно во времени
провода, наводят в них ЭДС, изменяющиеся по гармоническому закону. Бла­
годаря идентичности выполнения рамок-обмоток и строгому их размещению
создаваемые напряжения имеют равные амплитуды и фазовый сдвиг 120°. На
практике для получения трехфазного напряжения используют генераторы, в
которых фазные обмотки А-А', В-В', С-С' размещены в пазах неподвижного
статора (рис. 2,6). Магнитное поле (N-S) создается вращаемым ротором с ка­
тушкой (на рис. 2,6 не показана), по которой протекает постоянный ток.
Т
773
-------**
а)
б)
Рис. 1. Временные зависимости мгновенных значений (а ) и векторная диаграмма
(б) симметричной трехфазной системы напряжений
На схемах фазные обмотки будем представлять источниками ЭДС (напря­
жения) и обозначать английскими буквами А, В, С, а создаваемые ими ЭДС —
мгновенными еА, ев, ес (рис. 2,в) или комплексными Ел, Ё В,Ё С (рис. 1,6 ) ве­
личинами. Принятые обозначения соответствуют нормальной, или прямой,
последовательности чередования фаз, при которой ЭДС Ёв отстает от Е А на
120°, Ёс отстает от Ёв на 120° (или опережает ЁА на 120°). Выражения ЭДС
для мгновенных значений имеют вид
(1)
еЛ = Е cos ш , ев = Е cos (со/ - 2я/3);
ес = Е cos (со/ - 4я/3) = Е cos (со/ + 2л/3),
в комплексной форме — вид
\
V
где а — фазовый множитель.
У
У
Магнитное поле
А9
еАО
0°
В9
ев О
ОО
СО
ес С)
в)
0*
Рис. 2. Принцип получения трехфазного напряжения (а) и его реализация (б);
обозначение фазных обмоток и ЭДС (в)
Схемы трехфазных цепей. Обмотки источника трехфазного напря­
жения (ЭДС) могут быть соединены:
=> по схеме звезды (рис. 3 ,а), в которой выводы трех обмоток с нулевым
потенциалом (рис. 2,в) объединяют в одну точку, называемую нулевой
точкой генератора. Амплитуды напряжений между другими выводами
обмоток UAB = UAB = UAb = л/3 Е;
=> по схеме треугольника (рис. 3,6), в которой обмотки генератора обра­
зуют последовательную цепь с выводами А, В, С. Геометрическая
сумма ЭДС Ё А, Ё В,Ё С в замкнутом треугольнике равна нулю. По­
этому если к выводам А, В, С не подключена нагрузка, то по обмоткам
ток не протекает.
Трехфазной цепью называют совокупность трехфазной системы напряжений
источника, трехфазной нагрузки и соединительных проводов. В симметричной
трехфазной цепи все напряжения и равны по амплитуде и имеют фазовый сдвиг
120°. Часть трехфазной цепи, в которой действуют однофазные напряжения и
токи называют фазой. В общем случае фаза представляет собой однофазную
цепь, входящую в состав многофазной цепи. Фазные цепи нагрузки (также как и
источника) соединяются по схеме звезды или треугольника.
Возможны различные способы соединения обмоток трехфазного источ­
ника энергии с потребителем. При раздельном соединении отдельных фаз
источника и нагрузки потребовалось бы шесть проводов, поэтому такое
схемное решение не применяется. На рис. 4 приведены схемы соединения
трехфазного источника с нагрузкой: звезда — звезда, треугольник — тре­
угольник, звезда — треугольник, треугольник — звезда. Провода A-а, В-Ъ,
С-с, соединяющие выводы генератора и нагрузки, называют линейными про­
водами, а текущие по ним токи I А, I в ,1 с — линейными токами.
Ао
Рис. 3. Схемы соединения фазных обмоток: звезда (а) и треугольник (б)
В схеме звезда — звезда, изображенной на рис. 4,а:
все концы фазных обмоток источника и приемника соединяются соот­
ветственно в общий узел 0 и 0 ', который называется нулевой, или ней­
тральной, точкой;
=> три провода, называемые линейными, соединяют генератор с приемником;
=> вместо трех обратных проводов используется один общий нулевой,
или нейтральный, провод. Нулевой провод может отсутствовать.
В схеме треугольник — треугольник (рис. 4,6) источник напряжения и
нагрузка соединены только с помощью линейных проводов А -а, В-b , С-с;
нулевой провод отсутствует. Достоинством этой схемы по сравнению со
схемой звезда — звезда без нулевого провода является взаимная неза­
висимость фазных токов.
Комбинированные варианты схем звезда — треугольник и треугольник
звезда приведены на рис. 4,в и г. В этих схемах трехфазных цепей
также отсутствует нулевой провод.
Особенности анализа трехфазных цепей. Поскольку трехфазные
цепи представляют собой совокупность однофазных цепей с гармониче­
ским воздействием, для проведения их анализа можно пользоваться ранее
рассмотренными методами. Анализ установившихся режимов проводится
методом комплексных амплитуд. Цель анализа — определение токов
фазных цепей.
З в е з д а - з в е з д а (рис. 4,а). За положительное направление на­
пряжения и тока нулевого провода примем направление от точки 0 ' к
точке 0. Используя метод узловых напряжений, находим напряжение ме­
жду нулевыми точками и токи фазных цепей:
(4)
I a —Ya [e a
£Vo);
i B - Y B(k B t^o’-o)’ i c
yc (e c
t / 0M)),
где YA, Yb, Yc, и Уо'-о — проводимости ( Y = HZ) соответствующих ветвей и
нулевого провода.
Рис. 4. Схемы соединения трехфазного источника
с трехфазной нагрузкой:
звезда — звезда (а); треугольник — треугольник (б);
звезда — треугольник (в); треугольник — звезда (г)
Соотношения (3), (4) позволяют рассмотреть некоторые частные случаи:
при малом сопротивлении нулевого провода (Z0_<) —> 0 или Ya-o -» оо)
напряжение С/0'-о ~ 0 (3), т.е. точки 0 ' и 0 фактически представляют со­
бой одну точку. В этом случае в схеме образуются три обособленных
контура. Токи в них (4):
Iл = YАЁ А ;
/ в = YBE B ;
/ г = YCEC ,
для симметричной трехфазной системы ЭДС напряжение (3) прини­
мает вид
(5)
U 0,
E A(YA+ a 2YB+ aY c ) '
Ya + Yb + Yc + Y,_,
для симметричной трехфазной системы ЭДС и нагрузки {YA= YB— Yc),
Ё А+ Ё А + ЁА - 0 и напряжение (/(мг = 0 , т.е. отсутствует необходи­
мость в нулевом проводе;
=> при размыкании или коротком замыкании какой-либо из фаз необхо­
димо в (3) соответствующим образом скорректировать значения YA,
Yb, Yc;
=> для трехфазной цепи без нулевого провода в ( 3 ) следует принять
Yу о = 0 .
Т р е у г о л ь н и к - т р е у г о л ь н и к (рис. 4,6). Для этой схемы
трехфазных цепей должны выполняться следующие соотношения:
(6 )
Ел + Е В + Е С ==0 ;
(7)
и аЬ = Еа;
(В)
Lh = E A!Z ah;
L = e .в / Z hc;
(9)
К ' —^ah Iса '
i в = he
й ы:• = Ев ; й „ = Ё с
■ /z „
^ah1 IС ~ Iса
Соотношение (6 ) накладывает жесткие требования на симметрию сис­
темы ЭДС (напряжений), создаваемых трехфазным генератором. В слу­
чае асимметричной системы ЭДС при соединении обмоток в треугольник
через них начинает протекать уравнительный ток, что может служить
причиной отказа от такой схемы соединения обмоток.
Соотношения (7) свидетельствуют о том, что линейные напряжения
равны соответствующим фазным напряжениям источника.
При симметричной нагрузке (Zab = Zbc = Zca) линейные токи (9) по мо­
дулю в л/3 раз больше фазовых токов нагрузки, при асимметричной на­
грузке
могут быть как больше, так и меньше фазовых токов нагрузки.
Достоинством этой схемы по сравнению со схемой звезда — звезда
без нулевого провода является взаимная независимость фазных токов
нагрузки.
З в е з д а - т р е у г о л ь н и к (рис. А,в). Для этой схемы трехфаз­
ных цепей должны выполняться следующие соотношения:
0л =ЁА- Ё в\ ии.=Ё в -Ё с; и „ = Ё с -Ё/,
~
~ Ев)/Zah, lhc = (Ёв —
Ёс)/ Z hc; 1са = (Ёс —
Ёл)/ Z ca;
^ А ~
Iu b
I са ’
IВ
~ ^ h c ~ ^ ah 1
IС
~
Си ~ ^ h e >
йаЬ+ йв + йс = ёа+ ё в + Ёс = о.
Т р е у г о л ь н и к - з в е з д а (рис. 4,г). Для этой схемы трехфаз­
ных цепей должны выполняться следующие соотношения:
(10) i A + i B+ i c = YuUa + YhUh + YCUC = 0;
(11)
i A =YaUa = U J Z a ; i B = Y hUh = U h/ Z h;
(12)
U a —U h = Ё A\
и ь - О с = Ё в -,
=YJUC = U C/ Z,;
Ос - и а = Ё с .
Определив из (12) U h = U u - E A; U с = Ё< + U a и подставив в (10), на­
ходим
(13)
U J b E A ~ YeEc
°
Га + Yh + Yc
Определив из (12) Ua = EA+ U h\ Uc = U h- E B и подставив в (10),
находим
Y F -Y F
(14)
П .+ П + П
Определив из (12) U h = Ё в + U c; Ua = Uc - Ёс и подставив в (10),
находим
(15)
у р -Y Ё
Ue ~ “ '
* "
Ya +Y „+Y c
После подстановки (13)—(15) в (11) можно найти токи.
Отметим, что перенумерацией полюсов зажимов (А на С, В на А и С
на В) можно получить симметричную запись выражений (13)—(15)
•
YhE(, - Y E A
°
Ya +Yb +Ye
.
YcE A- Y aEc
b
Ya +Yh + Yc
^
УаЁ в -У ьЁ А
с
Ya +Yb + Yc
ЦЕПИ ПРИ ВОЗДЕЙСТВИИ КОЛЕБАНИЙ
СЛОЖНОЙ ФОРМЫ
4.1. Классический метод анализа линейных цепей
Рассмотренный выше комплексный метод анализа установившегося ре­
жима динамических цепей подкупает своей простотой и наглядностью,
однако не позволяет выявить динамику протекающих процессов после
подачи воздействия. При исследовании переходных процессов в электри­
ческой цепи, необходимо располагать сведениями о мгновенных значе­
ниях токов и напряжений на начальном интервале времени. Полные све­
дения о цепи могут быть получены, если для ее описания использовать
дифференциальные уравнения. Для определения интересующей реакции
систему исходных дифференциальных уравнений путем исключения ос­
тальных переменных приводят к одному линейному уравнению ,/V-ro по­
рядка с постоянными коэффициентами ат, Ь„:
О)
П=о
Ш
т=0
at
■
где х = x(t) — воздействие; у = y (t) — выходная реакция, или отклик.
Правая часть уравнения является известной функцией f (t).
Порядок N дифференциального уравнения зависит от числа реактив­
ных элементов в цепи и способов их соединения. Цель анализа цепи —
нахождение решения линейного неоднородного дифференциального
уравнения (1). Метод непосредственного решения уравнения (1) называ­
ют классическим методом, который (в отличие от метода комплексных
амплитуд) относится к группе временных методов анализа цепей.
С уть метода. Из курса высшей математики известно, что общее ре­
шение неоднородного уравнения состоит из двух частей:
(2 )
y (,i) = y c{t) + y B{t),
где
=> У М — общее решение однородного (с нулевой правой частью) урав­
нения
N
<3)
d"v
2
^ = 0'
п=о> .dt
=> У'М — частное решение неоднородного уравнения для конкретной
правой части в уравнении ( 1).
О б щ е е р е ш е н и е . Равенство нулю правой части уравнения (3) оз­
начает отсутствие внешнего воздействия на цепь, что соответствует удалению:
=> всех источников напряжения и короткому замыканию их выводов;
=> всех источников тока или разрыву их выводов.
Освобожденная от источников энергии цепь предоставлена самой се­
бе и протекающие в ней процессы:
=> обеспечиваются начальным запасом энергии в индуктивностях и емкостях;
=> определяются только параметрами и свойствами самой цепи.
Поэтому решение y c(t) однородного уравнения в теории цепей назы­
вают свободной составляющей, или собственными колебаниями , а опре­
деляющие их корни характеристического уравнения — частотами соб­
ственных колебаний.
При отыскании общего решения уравнения (3) используют замечатель­
ное свойство экспоненциальной функции exp (pt) сохранять неизменной
свою форму при дифференцировании. Решение yc(t) ищут в виде линейной
комбинации экспонент exp (pt). Подстановка экспоненты и ее производных
dycn/dt = р" exp (pt) в (3) приводит (после сокращения экспоненты, входящей
в каждое слагаемое суммы) к алгебраическому уравнению Л/-Й степени, ко­
торое называется характеристическим уравнением:
(4)
или bNPN + bN-\PN~X+ -" + biP + bo = ° •
н=0
Характеристическое уравнение (4) оказывает основное влияние на ре­
зультаты анализа, поскольку вид полученного решения уравнения (3)
полностью определяется значениями его корней.
Если все N корней р„ характеристического уравнения различны, то
общее решение имеет вид
(5)
Y j bnPn = °
Ус = ^ Y ne x p ( p j ) ,
И=1
где Yn— произвольные постоянные.
При наличии в характеристическом уравнении кратных корней общее
решение будет содержать слагаемые в виде экспонент с множителями —
полиномами от t степени К - 1, где К — кратность корня. Например, если
имеется А"-кратный корень, т.е. р , = р 2 = ... = р к , а остальные корни —
простые, то решение имеет вид
(к
(6)
Л
у
Ус = Е П ''" ' ехр(р,0 + 2 Х е хр ( / у ) .
\и=1
)
*=a:+i
При наличии двух комплексно-сопряженных корней р \= у + ja> и
р 2 = у -у со в решении будет присутствовать гармоническое колебание
exp (p\t) + exp (p2t) = exp (уt) [exp (/со/) + exp (-y'co/)J = 2exp (y/) cos со/,
амплитуда которого изменяется по экспоненциальному закону с показа­
телем у/, а частота равна мнимой части комплексного корня.
Поскольку для N > 3 не существует общих решений степенных урав­
нений, для определения корней характеристического уравнения (4 ) ис­
пользуют численные методы.
Собственные колебания возникают под действием начальной энергии,
накопленной в емкостных и индуктивных элементах. В пассивной цепи
накопленная энергия выделятся в виде тепла в диссипативных элементах,
и свободные колебания с течением времени затухают. Поэтому простые
корни и реальные части комплексных корней характеристического урав­
нения пассивной цепи имеют отрицательные значения: Re р„ < 0.
Ч а с т н о е р е ш е н и е . Составляющая y„(t) решения ( 2 ), назы­
ваемая в теории цепей вынужденной составляющей, представляет част­
ное решение неоднородного уравнения (1). Ее название обусловлено тем,
что вид частного решения зависит от правой части уравнения, или от
воздействия x(t), которое во многом и определяет эту составляющую ре­
акции цепи. Наиболее просто вынужденная составляющая отыскивается
для экспоненциальных и гармонических воздействий, которые сохраняют
свою форму при дифференцировании. В этих случаях частное решение
задается также в виде линейной комбинации экспоненциальных или гар­
монических функций, и задача сводится к определению входящих в них
коэффициентов и параметров. Однако при высоком порядке уравнения
( 1) отыскание частного решения по указанному способу неопределенных
коэффициентов, как показано ниже, получается громоздким. При воздей­
ствии в виде ступенчатой функции (скачка напряжения или тока) вынуж­
денная реакция представляет собой постоянную величину, поскольку все
производные равны нулю. Постоянную, а также любую периодическую
вынужденную составляющую называют установившейся составляющей
реакции. Для этих случаев она весьма просто может быть определена
другими методами, например методом комплексной амплитуды.
4-1881
Для получения единственного решения произвольные постоянные Y„ (5)
определяют так, чтобы были удовлетворены N начальных условий в виде
значений искомой функции и ее ./V - 1 производных при t = 0 : г(0); г1(0);
г"(0);
/ ЛМ|(0). Эти начальные значения, называемые зависимыми условия­
ми, определяют из исходных уравнений цепи при t = 0 + по заданным незави­
симым начальным условиям — токам индуктивностей 4 (0+) = 4 (0 -) и напря­
жениям емкостей мс{Оь) = u d 0-). Отсюда следует важный вывод: порядок п
дифференциального уравнения цепи должен быть равен общему числу индук­
тивностей и емкостей, в которых можно задавать независимые начальные токи
и напряжения. Для определения N произвольных постоянных общего решения
необходимо иметь N независимо задаваемых начальных условий.
В заключение отметим, что нахождение решения дифференциального
уравнения высокого порядка классическим методом представляет слож­
ную вычислительную задачу. Поэтому для определения реакции цепи
при сложных сигналах наряду с классическим используют другие методы
анализа, которые рассматриваются в дальнейшем.
Проиллюстрируем классический метод на примере простейших цепей.
Двухэлементные цепи. Рассмотрим особенности использования
классического метода при анализе /?С-цепи (рис. 1,а). Для ее описания
воспользуемся топологическим и компонентными уравнениями
(7)
uR + ис = u(t); uR = Ri; i = C ^ ^ .
dt
u(t) О
u (t)Q
a)
Ur
, Ul
6)
Рис. 1. Двухэлементные RC—и RL—
цепи
Используя (7), получаем дифференциальное уравнение первого порядка
(8 )
+ « ,.= « ( /) ,
где х = RC — постоянная времени. Как будет показано ниже, постоянная
времени является одним из основных параметров двухэлементных цепей.
Временной анализ цепи на рис. 1,а сводится к решению уравнения (8 ). По
известному напряжению ис на конденсаторе с помощью компонентных
уравнений (7) определяется ток i в цепи и напряжение uRна резисторе.
Общее решение уравнения ( 8 ) будем искать в виде иСс = U exp (pt). Под­
становка U exp (pt) в (8 ) приводит к характеристическому уравнению
(9)
рх + 1 = 0.
Из уравнения (9) находим р = —1/т. Таким образом, общее решение
уравнения ( 8 ) имеет вид
( 10 ) ис,с = U exp (-tlx),
где U — постоянная интегрирования, определяемая из начальных усло­
вий (при t = 0 ).
Для нахождения частного и полного решения уравнения ( 8 ) рассмот­
рим несколько конкретных видов воздействия u(t), которое прикладыва­
ется к ЛС-цепи в момент времени t = 0 .
1. П о с т о я н н о е н а п р я ж е н и е : u(t) = E ( t > 0). Из ( 8 ) следу­
ет, что частное решение имеет вид мСв = Е, так как в установившемся
режиме xduc/dt = 0. Поэтому полное решение уравнения ( 8 ) для этого
случая с учетом ( 10 ) выражается соотношением
(11)
uc{t) = Е + U exp (-tlx).
Полагаем, что напряжение (11) при t = 0 равно U0, тогда U = U0- Е, и
полное решение принимает вид
u d t) = Е + (U0 - Е) exp (-tlx) или u({t) = Е \ \ - exp (-tlx)] + U0 exp (-tlx).
Форма напряжения u d t) на емкости для различных начальных усло­
вий ( U0) приведена на рис. 2,а,б,в.
Рассмотрим весьма важный в практическом отношении случай нуле­
вых начальных условий (U q = 0), для которого
(12) uL{t) = Е [ \ - exp (-tlx)].
С помощью выражения (12) можно определить длительность переходного
процесса как время Тпп, за которое напряжение на емкости увеличивается от 0
до 0,9 Е. Из уравнения Е - Е exp (~TmJx) = 0,9 Е находим Гпп = 2,3 т.
Для области малых времен (при t —» 0) экспоненту в (12) можно пред­
ставить первыми двумя членами степенного ряда (Тейлора), т.е. exp (-tlx) ~
~ 1 - tlx. Поэтому для этого случая напряжение на конденсаторе изменя­
ется по линейному закону uc(t) ~ Et/x. Такой закон соответствует измене­
нию напряжения на выходе идеального интегратора. Действительно, для
воздействующего на цепь напряжения u(t) = Е, получаем ]u(t) dt = \Е dt =
= Et. В идеальном интеграторе величина т определяет время, за которое
напряжение на емкости изменяется от 0 до Е. Для рассматриваемой цепи
при t = х имеем u d t) = Е —Е ехр (—1) = 0,63 Е (рис. 2,а). Следовательно, в
том случае, когда напряжение снимется с емкости С, цепь на рис. 1,а для
области малых времен ( t « т) выполняют операцию интегрирования.
Рис. 2. Временные зависимости напряжения на элементах /?С-цепи:
u({t) при начальных напряжениях на конденсаторе U0 = 0 (а ), U0 = 0,5 Е (б),
U0 = 1,5Е (в); uR(t) при начальном напряжении на конденсаторе О'» = 0 (г)
Используя (12), найдем напряжение на сопротивлении R при нулевых
начальных условиях
(13) uR(t) = Е - u d t) = Е ехр (-//х); при t —> 0 uR(t) ~ Е (1 - tlx).
Графические зависимости uR(t)IE, построенные с помощью (13), при­
ведены на рис. 2,г. Для этого случая время переходного процесса Т„п оп­
ределяется как интервал времени, за который происходит уменьшение
напряжения uR(t) на сопротивлении R от Е до 0,1 Е.
2.
Э к с п о н е н ц и а л ь н о е в о з д е й с т в и е : и(/) = Е exp (at),
где а = const. Из ( 8 ) следует, что в этом случае вынужденная составляю­
щая мс.в(0 должна также изменяться по экспоненциальному закону. Под­
становка ис.„(0 = В ехр (си) в ( 8 ) приводит к характеристическому урав­
нению ах В + В = Е, откуда находим В = Е/( 1 + ост). Поэтому полное ре­
шение для этого случая с учетом ( 10 ) имеет вид
(14) u d t) = Е ехр (Ш)/(1 + а т ) + U ехр (-tlx).
Для начальных условий Ис(0) = Uo из (14) находим U = U o -E /(l + ах).
С учетом этого решение (14) принимает вид (а Ф-х)
ис (t) = U0 ехр (-tlx) + Е[ехр (at) - ехр (-t/x)]/( 1 + ах).
Для а = х вынужденная составляющая имеет вид Et ехр (at). Исполь­
зуя ( 10 ), находим полное решение для этого случая
ис (0 = Et ехр (a t) + U ехр (-tlx).
3.
Г а р м о н и ч е с к о е в о з д е й с т в и е : u(t) = Е cos (со/ + а).
Для этого случая частное решение можно найти методом комплексных
амплитуд. Однако будем искать его как решение уравнения ( 8 ) в виде
(15)
иСв = В cos (со/ + а - Р).
Подстановка (15) в ( 8 ) дает уравнение
(16)
-сот# sin (со/ + а —Р) + В cos (со/ + а - Р) = Е cos (со/ + а).
Для нахождения В и Р преобразуем (16) к виду
(17)
—сотВ cos Р sin (со/ + а ) + сотВ sin Р cos (со/ + а ) +
+ В cos Р cos (со/ + а ) + В sin Р sin (со/ + а ) = Х () cos (со/ + а )
и, приравняв коэффициенты при sin (со/ + а ) и cos (со/ + а ) левой и правой
частей (17), получим систему из двух уравнений
(18)
-сот/? cos Р + В sin Р = 0;
(19)
сот.В sin Р + В cos Р = Е.
Из (18) определяем
(2 0 )
Р = arctg сот.
Используя (19), (20) и известные соотношения
.
х
1
arctg х = arcsin—= ----- = arccos—р=------ ,
уП + 7
л/1 + х 7
находим
(21)
B = E /y j\ + ( m ) 2 .
Используя (10), (15), (20), (21), запишем полное решение
ис (/) = C/exp (/ / т) + £ cos (со/ + а - arctgcox)/-y/l + (сот) 2 .
Полагаем, что напряжение u({t) при / = 0 равно £/0, тогда
U = U0 - £cos(а - arctgcor)/^/l + (сот) 2
и полное решение уравнения ( 8 ) принимает вид
ис (/) = и йсх р(/ / т) - £[cos (а - arctg сот) - cos (со/ + а - arctg сот)]/
+ (сот) 2 .
Отметим, что рассмотренными видами воздействия, по сути дела, и огра­
ничивается представление решения уравнения (8 ) в аналитической форме.
4.2. Метод переменных состояния
Особенности описания цепи. В качестве переменных помимо контурных
токов и узловых напряжений могут быть выбраны такие переменные, при
которых вместо рассматриваемого выше дифференциального уравнения
Л7-го порядка описание цепи сводится к системе уравнений в нормачъной
форме (или форме Коши). Каждое из уравнений в форме Коши:
=> содержит в левой части только первую производную соответствую­
щей переменной х„(/);
=> не содержит в правой части производных и является линейной функ­
цией только выбранных переменных xn(t) и приложенных к цепи сиг­
налов vm{t).
Представим в форме Коши дифференциальное уравнение N -го поряд­
ка с известной правой частью, записав его виде
N
Hnv
и=0
Cil
м
d mv
т=0
d tm
где /(? ) = ^ а т— —, v = у(/) — воздействие; у = y(t) — выходная реакция, или отклик цепи.
Введем новые переменные как совокупность вспомогательных функций
dx,
dx 2
dx N_2
dxN_x
Используя функции (2), дифференциальное уравнение (1) можно
представить в виде системы уравнений
(3)
dx
— - - х 2 = 0 •х, +1 •х 2 + 0 •Xj + • ••+ 0 •хЛ. + 0 ;
dt
dx
- 0 •Хх, + 0 ;
—
d t - = х,3 = 0 •х,1 +12 •х, + 0 •х,3 н----- 1
dx
— — = Хд, = 0 •х, + 0 ■х 2 + 0 •х3 + •••+1 •Хд, + 0 ;
dt
dX Х7
Ь(\
6]
&N 1
1 Г/ \
— У- = — 2-х,---- '-х2 --------- ^-Хд, + — Д О .
dt
bN 1 bN
bN
b /
'
В справедливости (3) нетрудно убедиться, подставляя в последнее урав­
нение системы X) = у, затем х2 = dx\ldt = dyldt, х3 = dxijdt = с?x t/d r = d1у!d r
и т.д. Последняя подстановка xN = d xy.\!dt = c t |Х|/с//ЛЧ = c f Ay ld f~ x с учетом
того, что dxN/dt = c tx [!df' = cfy!dtN, приводит к исходному уравнению ( 1).
Систему функций (2) можно рассматривать как некоторый вектор со­
стояния \(t) с координатами х ь .., xN, принадлежащий пространству со­
стояний рассматриваемой динамической цепи.
Представим (3) в матричной форме
"0
1
. .
0
0 '
*i
'o '
0
0
. .
0
0
*2
0
0
0
. .
0
1
©
dxx/ dt
kx . • kN_2
dx21dt
_
(4)
0
T
1
l
1
или dx/dt = Ах + v,
+
X
dx w_i / dt
.
XN
_
V
где kr = - b r/bN; г = 0, 1, ..., N -2, N - 1; v = / /bN; А — матрица NxN; х — вектор-столбец переменных состояния; v — вектор-столбец внешних воз­
действий.
В общем случае описание цепи сводится к двум системам уравнений,
имеющим в матричной форме следующий вид [17]:
(5)
dx/dt = Ах + Bv;
(6 )
у = Сх + Dv,
где
=> х = \(t) = [*](/), X2( 0 . —, *v(0 ]T— /V'-мериый вектор переменных, ком­
поненты которого x„(t) называют переменными состояния;
=> v = \{t) = [vi(0 , v2(t),
vKi(t)]J — M-мерный вектор входных воздей­
ствий (параметров независимых источников напряжения и тока);
=> У = У(0 = \yi(t),УгО), ■■■• Ук(0Т —АГ-мерный вектор выходных парамет­
ров (искомых токов и напряжений);
=> А, В, С, D — матрицы с вещественными элементами размера NxN,
NxM, KxN, К хМ соответственно.
Переменные состояния xn(t) полностью определяют реакции (отклики)
всех ветвей цепи при заданных начальных условиях и приложенных при
t > t0 внешних воздействий. Использование их позволяет составить систему
(5) из наименьшего числа переменных. Число (N) уравнений в нормальной
форме (или число переменных состояния) определяет порядок дифференци­
ального уравнения цепи. Решения уравнений (5), (6 ) могут быть представле­
ны во временной области через матричную экспоненту и в частотной облас­
ти в виде передаточной матрицы [17].
О
выборе переменных состояния. Как указано выше, переменные
состояния x„(t) полностью определяют реакции (отклики) всех ветвей
цепи. Поэтому их выбирают так, чтобы при известном состоянии цепи в
момент t = /0, или значении вектора х(/0), и при известной для t > t 0 функ­
ции воздействий v(?) можно было найти выходные параметры у<() для
/ > t0. Исходя из указанного условия, переменными состояния целесооб­
разно выбирать напряжения на емкостях и токи в индуктивностях, по­
скольку при t = t0 они определяют независимые начальные условия и за­
пас энергии, связанной с электрическим и магнитным полями.
В тех случаях, когда цепь содержит:
=> С-контуры из емкостей или С- и is-контуры из емкостей и независи­
мых источников напряжения (ЭДС), между емкостными напряжения­
ми существует зависимость, обусловленная вторым законом Кирхго­
фа для напряжений;
=> /.-узлы из индуктивностей или L- и J-узлы из индуктивностей и незави­
симых источников тока, между индуктивными токами имеется зависи­
мость, определяемая первым законом Кирхгофа для узлов. В более об­
щем случае вместо узлов используются сечения (см. п. 4.6).
Такие контуры и узлы (сечения) называют особыми, а зависимость
между соответствующими переменными — топологической. Наличие
топологических особенностей уменьшает число независимых начальных
условий. В этом случае переменными состояния будут независимые ем­
костные напряжения и индуктивные токи, число которых равно суммар­
ному числу емкостей и индуктивностей за вычетом особых контуров и
узлов (сечений). Это число называется порядком сложности цепи.
Формирование уравнений состояния. Задача состоит в получении
выражений для матричных коэффициентов (или матриц А, В, С, D) урав­
нений (5) и (6 ). Рассмотрим общий путь решения этой задачи для случая,
когда цепь не содержит особых контуров и сечений. При составлении
уравнений состояния:
=> каждый элемент схемы (резистор, индуктивность, емкость, источник
напряжения, источник тока) представляется в виде двухполюсника и
учитывается как отдельная ветвь;
=> выделяется резистивная подсхема, представляющая собой в общем
случае многополюсник MR\
=> к полюсам (зажимам) подсхемы подключаются емкости С, индуктив­
ности L, источники напряжения Е и тока J (рис. 1, а);
=> каждая емкость С замещается эквивалентным источником напряже­
ния ис, а каждая индуктивность L — источником тока iL (рис. 1,6). Ве­
личины ис, h равны соответственно напряжению на емкости С и току
в индуктивности L.
,( Т >
Р“ “ ™ вный
многополю сник
ие \\
Т\
\\У
ц
Jt
ИС)
J
* \
• \
•
а)
• \
•
‘с
б)
ис
к
0
С
Рис. 1. Схемы для формирования уравнений состояния: исходная резистивная
подсхема (а); схема для непосредственного составления уравнений (б)
X
п
1
Воспользуемся рис. 1,6 для составления уравнений переменных со­
стояния. Введем следующие обозначения:
=> [uc Е iL J ]1 — вектор воздействующих на резистивный многополюсник
величин (напряжений на емкостях, напряжений источников, токов ин­
дуктивностей и токов источников). На рис. 1,6 этот вектор представлен
источниками напряжения и тока (выделены прямоугольником);
=> [ic 1e ul Uj]t — вектор отклика резистивного многополюсника (в ви­
де токов, протекающих через емкости и источники напряжения, и на­
пряжений на индуктивностях и на источниках тока).
Тогда связь между откликом и воздействием для резистивного (ли­
нейного) многополюсника можно представить в виде следующего мат­
ричного уравнения:
о
•с
(7)
UL
U l_
НСЕ H CL
H CJ
Н ес
Н ее
Н Е1.
H ej
H lc
_HJC
h le
h ll
h u
H je
H jl
uc
E
X
•l
J
n
1
Перепишем (7) в виде двух матричных уравнений, выделив вектор х
переменных состояния и вектор у реакций многополюсника
1
s
r
1
(8)
Нс
Н,
Не
н,
Нс
Н,
Нс
Н,
r
i
Ы
.V
Н ес H el
Н 1Г Н „
Н ее H ej
Н 1Г Н „
Запишем соотношения ic = Cduc/dt; u, = LdiL/dt для вектора перемен­
ных состояния
>c
. U L„
--
с
o'
0
L dt
d
uc
----
d
или — u c =
dt
A.
"c o'
A.
0
L
-i
*c
U L_
На основании (8 ) и (10) получаем матрицы, входящие в уравнение (5):
A=
C o'
0 LJ
-1
"с o'
HCL
; в=
0 L
HLC HLLJ
Hcc
-i
HCE HCJ
HLE HLJ.
Если вектор выходных переменных у содержит все элементы векто­
ров \F и Uj, т.е. определяется соотношением (9), то матричные коэффи­
циенты в (6 ) имеют вид [17]:
с=
HEC
HJC
^E L
H JL _
;
d=
HEE HEJ
HJE Нм.
Таким образом, Н-матрица (7) резистивной части схемы содержит все
матричные коэффициенты системы уравнений состояния (5) и (6 ). Эту
матрицу можно получить при использовании графов для топологическо­
го описания цепи по методике, изложенной в [22 ].
ш
Рис. 2. Исходная (а) и преобразованная (б) схемы для иллюстрации
составления уравнений состояния
П р и м е р . Составим уравнения состояния для цепи на рис. 2,а. На
рис. 2,6 изображена цепь с выделенным резисторным многополюсником.
Запишем топологические и компонентные уравнения
( 11 )
uR + uL + uc = e,
Ul
iG + ic = j +
_ i diL .
D■
^ diic
j ’ ^R “
^G ~ Guc ? l(- —С
at
dt
После подстановки uL, uR в первое уравнение (11) и iG, ic во второе
уравнение получим
(12)
uL = L ^ = e - u c - u R; C ^ f - = j + iL - i G.
dt
dt
Запишем систему уравнений (12) в матричной форме (5)
d h
-dt h ■_
=
- R /L
-M L
X
- 1 /C
-G /C
h
+
0 "
~ML
}c_
e
X
1/C
0
J.
4.3. Спектральный метод анализа
Периодические воздействия. Исходными данными для анализа служат:
=> воздействие в виде периодической функции времени xj{t)',
=> передаточная характеристика цепи в виде комплексной функции K(ja>).
Анализ стационарного режима цепей для этого случая проводится с
использованием методов комплексных амплитуд и наложения. Периоди­
ческое воздействие представляется тригонометрическим рядом Фурье,
который рассматривается как последовательное или параллельное соеди­
нение источников гармонических колебаний с кратными частотами. Ис­
комый отклик цепи определяется в результате суммирования предвари­
тельно найденных откликов для каждой гармоники ряда Фурье.
По следо вательн ость расчета:
=> воздействие Xj(t) представляется в виде ряда Фурье с ограниченным числом
гармоник; определяются амплитуды и начальные фазы воздействия (Х0, Хт
ф„); осуществляется переход к комплексной форме записи воздействия
N
N
x(t) = X 0 + Y , x nc 0 S(n£lt + y „ )
=>
' Z X nexPJ'(Pn ;
n=l
n=0
=> определяются параметры {K„, а„} передаточной характеристики на гармо­
никах воздействия: K(J(a) = K(jnQ) - К„ expja„, где п = 0 ,1 ,2 ,..., N;
=> вычисляются реакции цепи на частотах nQ:
Y„ exp jy „ = X„ ехр /ф„ K„ exp ja „ = X„ K„ exp;(ф„ + a„).
=> определяется суммарный отклик цепи
N
N
Y{jn Q ) = 2 X e x p ./a „ = Х Х К „е х р ./(ф „ + <x„);
n=l
«=]
=> суммарный отклик цепи записывается как функции времени
N
N
у ( 0 = Y0 + X r„cos(wQ/ + \|Г„) = Х 0К 0 + £ X „ K ncos(nQ.t + ф„ + а „ ).
п=1
п=\
Апериодические воздействия. Рассмотренный подход для периоди­
ческого воздействия распространяется на апериодическое воздействие,
если воспользоваться прямым и обратным преобразованием Фурье и его
свойствами (см. п. 1 . 1).
Исходными данными для анализа служат:
=> воздействие в виде непериодической функции времени x(t) на интер­
вале t = [- 00... 00];
=> передаточная характеристика цепи К{/ш) = К(ш) ехр /фд{0)) в диапазо­
не частот -«...оо.
П о с л е д о в а т е л ь н о с т ь расчета:
=> с помощью прямого преобразования Фурье определяется спектраль­
ная плотность воздействия — Д/со) = F[x(t)}\
=> вычисляется спектральная плотность отклика цепи — Y (/со) = К (j(£i)X (/со);
=> с помощью обратного преобразования Фурье определяется отклик
цепи как функция времени — у ( 0 ~ ^ '|Т(/Ш)]-
4.4. Операторные методы анализа
Сущность операторных методов. Анализ линейной электрической цепи
сводится к решению обыкновенных дифференциальных уравнений с по­
стоянными коэффициентами. Для этих целей можно использовать опера­
торные методы, которые состоят:
=> в переходе от дифференциальных уравнений к вспомогательным алгебраи­
ческим уравнениям с помощью некоторого (прямого) преобразования;
=> в поиске решений вспомогательных алгебраических уравнений;
=> в переходе от найденных решений вспомогательных алгебраических
уравнений к искомым решениям исходных дифференциальных урав­
нений с помощью некоторого (обратного) преобразования.
О с н о в н ы м и п о н я т и я м и операторных методов являются:
=> оригиналы, представляющие собой функции времени исходных дифферен­
циальных уравнений и их решений (воздействия и искомые отклики);
=> изображения, получаемые путем (прямого) преобразования оригина­
лов при составлении вспомогательных алгебраических уравнений по
определенным правилам.
Следует указать на д в а о п е р а т о р н ы х м е т о д а анализа
линейных цепей:
=> метод Лапласа, в котором переход от оригинала x(t) воздействия к его
изображению Х(.ч) и обратный переход от найденного изображения
решения 7 (5) к оригиналу y(t) осуществляется с помощью интеграль­
ных преобразований;
=> метод ДТ-преобразований, предложенный Г.Е. Пуховым [45], в кото­
ром оригинал x(t ) и его изображение Х(к) связаны операцией диффе­
ренцирования, а обратный переход от изображения Y{k) к оригиналу
y(t) производится на основе ряда Тейлора.
Рассмотрим широко распространенный метод Лапласа.
О ператорны й метод Лапласа. Проиллюстрируем особенности опе­
раторного метода на примере решения дифференциального уравнения
(v1)'
± Ь п„ ^itn1 = ± а т
т^ jt 1m
т-0
/7=0
аг
при нулевых начальных условиях, где ат, b„, x(t) — известные величины.
Необходимые сведения по преобразованию Лапласа и его свойствам при­
ведены в параграфе 1.1. Напомним, что прямое преобразование Лапласа по­
зволяет для известной функции^/), или оригинала, вычислить ее изображение
+е*
(2 )
F (s ) = J/(/)e x p (-s? ) d t , где s = а +усо; а > 0 ,
о
а обратное преобразование Лапласа — по известному изображению F(s)
функции — ее оригинал f(t), или временную зависимость.
1
(3)
ЛО =—
а+ /«*>
/^ ( s ) exps/ ds .
2п/ а-у-
Вычислив преобразования Лапласа (2) для обеих частей уравнения
(1), с учетом того, что /7-кратное дифференцирование оригинала равно­
сильно умножению на s" изображения, получим
N
(4)
М
Г(5)2>„5" =
.
rt—о
т -о
Важнейшей характеристикой, на которой основан операторный метод, яв­
ляется отношение изображений отклика цепи к воздействию K(s) = Y(s)/X(s),
называемое передаточной функцией цепи, или операторным коэффициентом
передачи. Из (4) находим
м
(5)
«■(,)=
м
П ^ _ 5 н.т )
-------= А', .
b ,s -
f t c - o
п=0
где К(1 = const;
sa,m — нули и полюса передаточной функции K(s), ко­
торые являются соответственно корнями уравнений
Х « „ , ^ = 0; 2 > У = 0 .
т=0
п=0
В виду вещественности коэффициентов дифференциального уравнения
( 1) все корни либо вещественны, либо образуют комплексно-сопряженные
пары. Если передаточная функция K(s) известна, то поиск отклика y{t) на
заданное входное воздействие x(t) разбивается на три этапа:
=> переход от оригинала к изображению: x(t) —> X(s), который осуществ­
ляется с помощью прямого преобразования Лапласа (2);
=> определение изображения отклика цепи: Y(s) = K (s ) X(s);
=> переход от найденного изображения отклика к оригиналу: Y(s) —>y(t) >
который осуществляется с помощью обратного преобразования Лап­
ласа (3) и в общем случае требует вычисления контурного интеграла с
применением теоремы о вычетах Коши.
Как следует из (1), (4), операторный метод основан на символиче­
ской замене оператора дифференцирования cf/dt" комплексным чис­
лом 5". Его практическая ценность состоит в переходе к алгебраиче­
ской форме описания электрических цепей (вместо дифференциаль­
ных уравнений). Передаточную функция K(s) можно рассматривать
как аналитическое продолжение частотного коэффициента передачи
K(j(]i) с мнимой оси j со на всю плоскость комплексных частот 5 = а +
+ у'со. Свойства цепи полностью определяются нулями и полюсами пе­
редаточной функции K (s).
Определение оригиналов. Переход от найденного изображения от­
клика Y(s) к оригиналу >’(/) требует вычисления контурного интеграла (3)
с применением теоремы о вычетах Коши, что в общем случае является
достаточно трудоемкой задачей. Поэтому для многих сигналов, встре­
чающихся в инженерной практике, изображения рассчитаны и приводят­
ся в справочной литературе. Для некоторых из них изображения приве­
дены в табл. 1, при этом y(t) = 0 при t < 0 .
Для перехода от изображения Y(s) к оригиналу }{t) можно использовать
ф о р м у л ы о б р а щ е н и я (называемые теоремой разложения).
Если в выражении изображения отклика, представленного как (5) в
виде отношения двух степенных полиномов
м
(6 )
м
M (s)
П ( 5 - 5н,т )
Y ( s ) = ^ - = ^ ------- = K 0^ f -----------N (s)
n=0
f f c '- o
и=0
степень числителя не превосходит степени знаменателя, т.е. М < N и при
этом корни знаменателя v « (полюса) являются простыми, то дробно­
рациональное изображение (6 ) можно разложить на простые дроби
(7)
=
=
N {s)
„=i s
snn
где С„ — вычеты в полюсах sn,„. Значение С* (к е п) можно найти, если
обе части (7) умножить на s и принять s = snl:. Тогда в правой части
все слагаемые обратятся в нуль, за исключением коэффициента С*. Так
как Y(s„,*) = 0, необходимо по правилу Лопиталя раскрыть неопределен­
ность 0/0. В результате получим
(^s\
8)
г = ( s - sс к)\ ~М —
^
Ск
N (s)
_ M (sn,k)
s-,a
N 'iS^
Таблица 1
y( t)
т
1
l/s
1/Г
Ms”
M(s + а)
1/(5 + а )2
1/(5 + а)л
1/[ф + а)]
s/(s - a)(s - b)
u)/(s2 + со2)
s/(s2 + со2)
(s sin а + w cos a)/(s2 + to2)
(s cos а - to sin a)/(s2 + co2)
s/(s2 + co2)2
co/[(i2 + a 2) + a)2]
l/[s(s2 + co2)]
l/[(j + a ) 2 + co2]
((3 - a)/[(s + a )(s + 3)]
co/[(.s2 + a 2) + co2]
(s + a)/[(s + a ) 2 + co2]
5(0
HO
t
Г '/{ п - 1)!
еш
ftf"
Г ' e ^ K n - 1)!
(1 - O / a
(еш- е р')/(в~*)
sin ш/
cos ш
sin (Ш + a)
cos (wf + a)
t sin co//(2 co)
ё~ш sin cot
(1 - cos co/)/co2
e aj sin a>//co
e ^ -e *
е "ш sin Ш
e~w cos со/
После изменения индекса &на и и подстановки С„ ( 8 ) в (7) выражение
операторной функции принимает вид
(9)
Y(s) = j ^ — (S
^ ") .... 1
.
N \ s nM) s - s n,n
Учитывая, что изображению l/(s - sk) соответствует оригинал ё к\ по­
лучаем для изображения (9) следующую формулу обращения:
(Ю)
y {t) = £ ^ ^ L e s''"'.
В [22] приведены формулы обращения, когда корень sllrl уравнения
N(s ) = 0 имеет кратность г, знаменатель изображения N(s) имеет два ком­
плексно сопряженных корня, и для других случаев.
Особенности анализа цепей операторным методом. Для проведе­
ния анализа с учетом произвольных начальных условий составляется
операторная схема замещения исходной цепи. На этой схеме вместо на­
пряжений и токов указываются их изображения, а элементы представля­
ются операторными сопротивлениями или проводимостями, как и в ме­
тоде комплексных амплитуд, путем формальной замены /ш на перемен­
ную s, т.е. Z(s) = \IY(s) = U(s)H(s). Для описания схемы замещения ис­
пользуются законы Кирхгофа в операторной форме, согласно которым
сумма изображений токов в узле и сумма изображений напряжений в
контуре равны нулю:
£ /„ ( * ) = 0; 2 X ( s ) = 0 .
Операторные схемы элементов. Для резистивных элементов сопро­
тивление и проводимость сохраняют свой вид Z(s) = R; Y(s) = G. Для
емкостных и индуктивных элементов ненулевые начальные условия учи­
тываются введением дополнительных источников, которые отражают
накопленную в них энергию.
Для емкостного элемента с начальным напряжением ис{0) связь между то­
ком и напряжением в операторной форме можно выразить соотношениями
(11)
I(s) = sC U c{s) - Сис (0); U(s) = Ic (s)/sC + щ Щ /s.
Для индуктивного элемента с начальным током 4(0) операторная связь
мемоду напряжением и током может быть задана с помощью соотношений
(12)
U (s )
= s L1 l( s ) - /,4(0); IL(s)= U l ( s )/ s L +iL(0)/s.
Операторные схемы для емкостного и индуктивного элементов, постро­
енные в соответствии с выражениями ( 11), ( 12), изображены на рис. 1,а,б,
при этом:
■ в схемах для емкостного элемента (рис. 1,а) начальное напряжение
(заряд) учитывается с помощью операторных источников импульсного
тока C u d 0 ) или ступенчатого напряжения ud0)/s, включенных со­
ответственно параллельно емкостной проводимости sC или последо­
вательно с емкостным сопротивлением 1/sC;
в схемах для индуктивного элемента (рис. 1,6 ) начальный ток (потокосцепление) учитывается введением операторного источника импульсного
напряжения LiL(Q), включенного последовательно с индуктивным со­
противлением sL, или источника ступенчатого напряжения /z(0)/.v, со­
единенного параллельно индуктивной проводимости 1IsL.
his)
/<<*)
'I
»с<0
с" т
^
ад>1
I/sC
s C = r f Сщ {0)
Ut{s)
X
»aoy*(f)
a)
Ids)
Ш)
Ids)
sL
"i(0
Uds)
I/sL j
/t (0 ) /I
U dO )Q
6)
Рис. 1. Операторные схемы для емкостного (а) и индуктивного (б) элементов
Операторные схемы замещения цепи составляются на основе задан­
ной электрической схемы для оригиналов. Сопротивления элементов вет­
вей записываются в операторной форме: R , pL, 1!{рС). Изображения за­
данных ЭДС и токов источников находят, как правило, по таблицам.
П о с л е д о в а т е л ь н о с т ь р а с ч е т а переходного режима:
рассчитывается установившийся режим в схеме до коммутации для
определения начальных значений /с(0 ), uL{0 );
=> составляется операторная схема для цепи после коммутации;
=> составляются уравнения для изображений искомых переменных или
применяются методы преобразования схем с целью определения изо­
бражений требуемых реакций;
=> определяются изображения искомых величин (откликов) с использо­
ванием известных способов расчета установившихся режимов цепи;
=> определяются оригиналы найденных изображений (с помощью таблиц
соответствий преобразования Лапласа, разложения на простые дроби
или интеграла обратного преобразования).
4.5. Временные методы анализа
Сущность методов. Методы анализа цепей во временной области при
произвольных воздействиях базируются на использовании следующего
подхода (рис. 1). Входное воздействие х представляется суммой элемен­
тарных сигналов х„, возникающих последовательно через некоторый
временной интервал Дт:
(1)
x(t) = £ х „ ( / - п Дт).
Определяется отклик (реакция) цепи на элементарное воздействие:
(2)
y„(t - «Дт) = к(1 - «Ат) x„(t - «Дт),
где k(t - «Дт) — известная передаточная характеристика цепи.
На основании принципа наложения результирующий отклик цепи
представляется как сумма откликов на каждое элементарное воздействие:
(3)
y(t) = ' Z y „ U ~
иАт) = X
- «АтК
(? ~
”Ат)-
Осуществляется предельный переход Дт —»0, позволяющий получить точ­
ное описание воздействующего сигнала (1) и отклика (3). Такой подход отража­
ет развивающийся во времени (динамический) характер процесса. В качестве
элементарных воздействий широкое распространение получили сигналы в виде:
=> ступенчатой функции, отражающей приращение входного воздейст­
вия x(t ) на каждом временном интервале Дт (рис. 1,а). В этом случае
реакция цепи определяется переходной характеристикой цепи;
=> примыкающих друг к другу прямоугольных импульсов длительностью Дт
(рис. 1,6), вырождающихся при Дт —> 0 в единичный импульс. Для этого
случая отклик цепи определяется с помощью импульсной характеристики.
Элементарные воздействия х„ позволяют ввести передаточную функ­
цию цепи и использовать ее для определения откликов у„.
Переходная характеристика и отклик цепи. Представим воздейст­
вие ступенчатой формы, прикладываемое к цепи в момент времени
т„ = пАт в следующем виде (рис. 1,а):
(4)
*,,„(/ -т „ ) = АХ„ 1 (/-т„),
где АХп — амплитуда воздействия; 1(/ - т„) — единичная ступенчатая
функция (функция включения):
при / < т„,
при / > т„.
х
У
т„___
х„
Ат
Уп
х„
Jiw.
б)
Рис. 1. Иллюстрация временных методов анализа цепей:
представление воздействия произвольной формы
с использованием ступенчатой функции (а) и примыкающих друг к другу
прямоугольных импульсов (б)
Передаточная функция цепи при воздействии (4) называется переход­
ной характеристикой и представляет собой следующее соотношение:
(6 )
g ( t - т„) = y„(t - Т„)/АХ„.
Выражение (6 ) свидетельствует о том, что при воздействии в момент
т„ сигнала AX„-\(t — т„) отклик цепи изменяется по закону переходной
характеристики: y„(t —т„) = АХ„ g (t —т„). Поэтому результирующий отклик
представим в виде следующей суммы:
(7)
y {t) = x(0 )g (t) + Y^AXng { t - T n),
где лг(0 ) = ДА^о.
Осуществим в (7) предельный переход, устремив Дт —> 0. В этом случае:
=> дискретное время элементарного воздействия х„ (4) т„ = иДт —> т;
=> число членов в сумме п —»
сумма становится интегралом, а поряд­
ковый член п суммы — текущим временем /, при этом верхний предел
интегрирования соответствует текущему времени t;
=> амплитуда элементарного воздействия
ЪХп —» ---- - Дх = —
с1х = х '(x)dx.
Дт
dt ,=1
Поэтому выражение (7) приобретает вид
о
Выражение (8 ) известно как интеграл Дюамеля. возможны другие формы
его представления, например:
y(t) = х(0) • g( t) + IV(г - x)g{x)dx; y(t) = x(t) • g(0) + Jx(T)g’(* - x )rfr.
О
0
И мпульсная характеристика и отклик цепи. Элементарное воздей­
ствие прямоугольной формы с амплитудой Х„ (рис. 1,6), прикладываемое
к цепи в момент времени х„ = пАх, представим как разность двух ступен­
чатых функций. Используя (5), получаем:
(9)
х5.„ (t - х п) = Х „ [ \ (/ - т„) - 1(/ - хп - Ат)] = S„ 8 4(г - т„).
где 8 д(/ —тя) = [ 1(/ —тя) — 1(/ —х„ -Ат)]/Ат — форма элементарного воз­
действия; S„ =Х „А х — площадь импульса, которую можно трактовать как
амплитуду элементарного воздействия.
Пусть у „(t - т„) — отклик цепи на воздействие (9). Введем передаточ­
ную функцию, представляющую собой отношение отклика к площади
воздействующего импульса:
( 10)
h(t - х„) = у n(t - х„ )/S„.
Функция (10) называется импульсной характеристикой цепи. Запишем ре­
зультирующий отклик (3) цепи для рассматриваемого случая с учетом (9), (10):
(И )
у (о = 2 > я (' - о
п=0
= ! > ( ' - т »)* » Лхп-0
Осуществим в (11) предельный переход, устремив Ат —» 0. Для этого
случая дискретное время т„ = «Ат —» т; Ат —> dx; Х„ —> х(! —т); число чле­
нов в сумме п —>
сумма становится интегралом, а порядковый член п
суммы — текущим временем t, при этом верхний предел интегрирования
соответствует текущему времени t. Выражение (11) приобретает вид
( 12)
y ( t) — |х (т) h(i —x)dx или в другой форме y {t) = Jx(/ —т) h{x)dx.
о
_0°
1( / - т ) - 1( / - т - А т )
ч
По определению предел lim ---- ------------------------- о(/ - т) представдт-< 0
Дх
ляет собой известную 5-функцию. Поэтому при Ат —> 0 выражение (10)
для импульсной характеристики с учетом (9) можно записать в виде
(13)
h(t - т) = K (t - х) 5(/ - т), где K {t - т) = y(t - x)/x{t - т).
Таким образом, импульсную характеристику можно рассматривать как от­
клик линейной стационарной системы на входной сигнал в виде 8 -функции.
Отклик цепи на воздействие x(t) произвольной формы определяется по извест­
ной импульсной характеристике с помощью выражений ( 12).
С вязь между переходной и импульсной характеристиками. Пусть
воздействием является ступенчатая функция x(t) = ХЛ( 1). Тогда согласно
соотношению (6 ) отклик цепи запишется в виде
(14)
y {t)= X g (t).
Используя формулу (12), получаем
(15)
У(0 = X Jl (т) h(t - х)dx = X ^ h ( t - х )dx.
о
о
И з (14) и (1 5 )находим
/
g(t) = \ h { t - т )dz или g'(t) = h{t).
О
С вязь между импульсной и частотной характеристиками. В тео­
рии систем представляют интерес входные сигналы, для которых сигна­
лы на выходе сохраняют свою форму, т.е. y{t) = X x(t). В этом случае х(/)
называют собственной функцией системного оператора, а комплексное
число X = K(j\о) — его собственным значением.
Воспользовавшись вторым выражением ( 12 ), запишем для входного
сигнала x{t) = ехр(/ш/) отклик
y (t) = |ехр[у'со(/ - х)] h(T)di = K (j(a )e x p (jw t ) , где
(16)
K (ju ) = J h (t)ex p (-ju > t)d t.
Соотношение (16) позволяет по известной импульсной характеристи­
ке цепи определить ее частотную характеристику (как прямое преобразо­
вание Фурье). Используя обратное преобразование Фурье можно опреде­
лить импульсную характеристику
1 °°
h(l) = — | К (j(a)exp(j(M )dt .
2л
В а ж н ы й в ы в о д : любую линейную систему можно рассмат­
ривать во временной области с помощью ее импульсной характери­
стики или в частотной области — с помощью частотного коэффици­
ента передачи.
4.6. Графы и их использование для описания цепей
Под топологической структурой, или топологией, электрической цепи
обычно понимается ее конфигурация, определяемая способом соединения
базисных компонентов-двухполюсников, при этом тип компонентов не игра­
ет никакой роли. Полное описание цепи включает два вида уравнений:
=> топологические уравнения, характеризующие структурные особенно­
сти цепи, или ее конфигурацию. Для их составления используются
граф цепи и топологические матрицы',
=> компонентные уравнения, отражающие характеристики компонентов
(ветвей).
Для топологического описания свойств цепи широко используется
одно из направлений математики — теория графов.
Основные понятия теории графов. Топологическое описание цепи
должно содержать:
=> способ соединения ветвей;
=> опорные направления для токов ветвей и напряжений.
Для описания способа соединения ветвей цепи используется нена­
правленный граф , представляющий собой совокупность отрезков произ­
вольной длины и формы, называемых ветвями (ребрами), и точек их со­
единения (или окончаний), называемых узлами (вершинами). Для пере­
хода от схемы электрической цепи (рис. 1,а) к ненаправленному графу
(рис. 1,6 ) следует заменить элементы (двухполюсники) ветвями графа.
III
Г
л.
7
III
5
IV
а)
б)
Рис. 1. Электрическая цепь (а) и ее представление в виде ненаправленного (б)
и направленного (в) графов
Опорные направления тока и напряжения помечаются на ветвях графа
стрелками. Стрелка направлена от вершины графа, соответствующей по­
люсу цепи с положительным потенциалом, и указывает положительное
направление тока через ветвь. Такой принцип разметки исключает необхо­
димость использования отдельных наборов опорных точек для токов и для
напряжений. Граф с ориентированными ветвями называется направленным
графом (рис. 1,в). Он содержит полную информацию о топологии цепи.
Для пояснения ряда понятий будем использовать приведенные на
рис. 1 схему и оба вида графов, при этом ветви графа будем обозначать
арабскими цифрами, узлы — римскими.
Помимо ненаправленного и направленного графов известно большое
количество других видов графов. Среди них следует выделить:
=> непланарный (пространственный) граф с пересекающимися (1 и 2 ) ветвя­
ми (рис. 2 ), если при его изображении на плоском чертеже невозможно
избежать пересечения ветвей, и планарный (плоский) граф, который
можно изобразить на плоскости без пересечения ветвей (рис. 3 ,а);
Рис. 2. Непланарный
граф
Рис. 3. Планарный граф (а) и его подграфы (б)
—•* подграф (рис. 3,6), представляющий собой любую совокупность вет­
вей и вершин основного графа (рис. 3 ,а);
=> связный граф (рис. 3 ,а), в котором имеется хотя бы один путь между
любой парой узлов, и несвязный граф в противном случае (рис. 3 ,6 );
=> путь граф а — подграф в виде непрерывной последовательности вет­
вей (1—3—5—8 —9 на рис. 3,а), связывающую пару выбранных узлов
(I, IV), с прохождением каждого узла не более одного раза;
=> контур — связный подграф, имеющий замкнутый путь, в котором
начальная вершина совпадает с конечной. В контуре к каждому узлу
присоединены по две ветви. На рис. 4 изображены все 7 контуров не­
направленного графа на рис. 1,6 ;
=> сечение — любая минимальная совокупность ветвей (4 , 5 , 6 на рис. 3 ,а),
при удалении которых граф распадается на два несвязных подграфа
(рис. 3,6). Восстановление любой ветви из удаленного набора приво­
дит к связному графу. Отметим, что количество ветвей в сечении не
фиксировано. В частном случае несвязный подграф может не иметь
ветвей и состоять только из одного узла. Число возможных сечений
может намного превысить число узлов. Сечение изображается линией,
однократно пересекающей каждую его ветвь. Для изображения будем
использовать овал или линию со стрелками (рис. 3 ,а), указывающими
на внутреннюю область сечения, которую называют обобщенным у з­
лом. Введение этого понятия позволяет однозначно задать направле­
ние токов: втекающих в узел, вытекающих из узла.
Таким образом, в общем случае сечение разделяет цепь на две части,
связанные друг с другом с помощью соединительных ветвей. Для любого
сечения выполняется второй закон Кирхгофа: алгебраическая сумма то­
ков, протекающих по соединительным ветвям сечения, равна нулю:
Рис. 4. Полный набор контуров ненаправленного графа на рис. 1,6
=> дерево графа, представляющее собой связный подграф, который содержит
все узлы исходного связного графа и не содержит контуров. Между любой
парой узлов дерева имеется единственный путь. Ветви, принадлежащие
дереву, будем называть ребрами', а ветви, не принадлежащие дереву, —
хордами. Все хорды, соответствующие данному дереву, образуют подграф,
называемый дополнением дерева. На рис. 5,а приведено дерево тля графа
на рис. 1,6, при этом ребра нанесены сплошными линиями, а хорды
пунктирными. Число ребер: Np = Ny - 1 = 4 - 1 = 3; число хорд: NX= NB- N y
+ j = 6 - 4 + 1 = 3. Число возможных деревьев Na исходного графа очень
быстро растет с увеличением числа узлов: для Ny = 4 имеем Na = 16 (рис. 6 );
ддя дгу= 6 _ дгд = 1296. С деревом связаны главные контуры и главные се­
чения, которые определяют ряд важных свойств графа;
=> главный контур, образующийся при подключении хорды к дереву
графа (рис. 5,6). Уравнения равновесия напряжений в главных конту­
рах являются независимыми. Для выбранного дерева число главных
контуров равно числу его хорд NX= N B- N y + 1 = 6 - 4 + 1 = 3;
=> главное сечение, содержащее только одну ветвь дерева (ребро), кото­
рая не входит в другие сечения, и несколько хорд. Поэтому уравнения
равновесия токов в главных сечениях являются независимыми. Для
выбранного дерева число главных сечений равно числу его ребер
Лгр = А^у- 1 = 4 - 1 = 3 (рис. 5,а).
Ребро
1
1
Рис. 6. Полный набор деревьев ненаправленного графа на рис. 1,6
Топологические матрицы. Содержащаяся в направленном графе
информация может быть полностью представлена топологическими мат­
рицами, которые служат его аналитическим описанием. Топологические
матрицы играют важную роль в теории цепей, так как позволяют:
=> автоматизировать процесс составления уравнений исследуемой цепи
по законам Кирхгофа;
=> получить систему из линейно независимых уравнений, которая всегда
имеет решение.
В общем случае для п о с т р о е н и я
м а т р и ц ы предварительно следует:
топологической
=> составить (выбрать) дерево исходного графа;
=> пронумеровать узлы, ветви, главные сечения и главные контуры гра­
фа. При нумерации ветвей будем нумеровать сначала ребра, а затем
хорды. Ниже показано, что раздельная нумерация ребер и хорд позво­
ляет выделить в топологической матрице единичную подматрицу.
Номер главного сечения совпадает с номером входящего в его состав
ребра, а номер главного контура — с номером хорды;
=> выбрать положительные направления ветвей графа. Этот выбор под­
чинен получению единичной подматрицы и обосновывается при рас­
смотрении конкретных матриц.
Изложение материала иллюстрируется на примере графа с Ny= 4 узлами
и NB= 6 ветвями. На рис. 7,а, изображено дерево графа, содержащее:
=> три ребра (1, 2, 3) и три хорды (4, 5, 6 );
=> три главных сечения (рис. 7,6), каждое из которых содержит только пере­
секаемые сечением ветви графа: сечение 1 содержит ребро 1 и хорды 5 , 6 ;
сечение 2 — ребро 2 и хорды 4, 6 (обратить внимание на разметку); сече­
ние 3 — ребро 3 и хорды 4, 5. Номер каждого сечения совпадает с номе­
ром принадлежащего сечению ребра. Ток ребра каждого главного сече­
ния направлен во внутрь сечения (обобщенного узла);
=> три главных контура 4, 5, 6 (рис. 7,в,г,д). Направление контурного
тока совпадает с направлением тока входящей в контур хорды.
Ребро
х °р да
^
]]
III
IV
IV
IV
Рис. 7. Исходный граф (а), его главные сечения (б ) и главные контура (в )
для иллюстрации построения топологических матриц
Матрица
и н ц и д е н ц и й . Среди топологических матриц ши­
роко используется N yx N B матрица инциденций А а = а,у, или соединений
узел — ветвь. Каждая i-я строка такой матрицы показывает, какие ветви
связаны с данным узлом, или, как говорят, инцидентны i-у узлу. Отсюда
название матрицы. Для направленного графа (рис. 7,а) матрицу инциден­
ций можно представить в виде табл. 1 , строки которой являются поряд­
ковыми номерами узлов (0, а столбцы — номерами ветвей (/'). Число
строк полной матрицы А а = [а,у] равно числу узлов графа (А'у = 4), а число
столбцов — числу ветвей (N B= 6 ).
Каждый элемент ау матрицы А а равен:
=> —1, если j - я ветвь входит в г-й узел;
=> + 1 , если j - я ветвь выходит из г-го узла;
=> О, если она не соединена с г-м узлом.
Отметим, что при определении элементов а,у можно пользоваться раз­
ными правилами, лишь бы они были единообразными при определении
знаков всех ненулевых элементов матрицы.
Таблица 1
Ветви j
Узлы
Ребра [А р]
i
‘
1 O'l)
2 (»2)
1
+1
II
-1
III
0
IV
■
о
..J
Хорды [А х
з Оз)
4 (*4)
5 (*5)
6 Об)
-1
0
-1
0
0
0
0
0
+1
+1
+1
+1
0
0
-1
.
0
>„1
■;
;
*1
Поскольку каждая ветвь соединена с двумя узлами, в один из которых
она входит, а из другого выходит, то сумма элементов в каждом столбце,
а значит, и сумма элементов всей таблицы равна нулю. Следовательно,
любую строку можно рассматривать как линейную комбинацию осталь­
ных строк. Поэтому одну из строк, обычно соответствующую базисному
узлу (например, узлу IV), вычеркивают. Образующаяся при этом редуци­
рованная матрица А размером (А'у — 1) х N B называется матрицей узлов.
Если каждойу-й ветви сопоставить ток г; (табл. 1), то закон Кирхгофа для
токов в матричной форме имеет вид:
1]
'+1
-1
0
0
0
-1
-1
0
0
0
-1
+ 1 -1
0
-1
0
‘2
0 X
h
+1
0
= 0
1А
0
15
.
гае i — вектор токов размерности NB; 0 — нулевой вектор размерности /Vy — 1.
Матрицу соединений А можно представить в виде подматриц А р и А х, от­
носящихся к ребрам и хордам (соответственно левая и правая часть табл. 1).
= A „рi „р + A .Xi X,
Ai = [A p A J
Матрица
главных
=
0
.
сечений.
Каждое главное сечение
включает в себя одно ребро и нескольких хорд. Число главных сечений
равно числу ребер N p. Поэтому уравнения равновесия токов в главных
сечениях являются независимыми. На рис. 7,6 показаны три главных се­
чения ( 1 , 2 , 3) выбранного дерева.
Матрицу главных сечений П можно представить в виде табл. 2
размером (N y - 1) х N B, i-я строка которой соответствуют главному
сечению, a j - й столбец — ветви графа. Каждый элемент а-у этой мат­
рицы равен:
=> - 1 , если j -я ветвь выходит из г'-го сечения;
=> + 1, если j - я ветвь входит внутрь г'-го сечения;
=> 0 , если j - я ветвь не содержится в сечении.
Таблица 2
Ветви - /
Гл. сечения
Хорды [П х
Ребра [1]
(ребра - г)
100
2 О'г)
з Оз)
4
(1 4 )
5 (/5)
6 Об)
-1
-1
1
+1
0
0
0
2
0
+1
0
+1
0
-1
3
0
0
+1
-1
+1
0
Обратить внимание на заполнение строки 2 табл. 2. Так как ветви 2
и 4 входят внутрь сечения 2 (рис. 7,6), в столбцы 2 и 4 внесены значе­
ния + 1 ; ветвь 6 выходит из сечения, поэтому внесено значение - 1 .
Матрица П описывает соединения ветвей, входящих в независимые
сечения. Ее можно представить в виде единичной матрицы 1 порядка
N p и подматрицы П х порядка N p х N x: П = [1 П х]. Каждая г'-я строка П х
показывает, какие хорды входят в главное сечение, образованное со­
ответствующим ребром дерева, a j -й столбец — в какие сечения вхо­
дит j - я хорда.
Элементы
матрицы П являются коэффициентами уравнений, кото­
рые составляются для токов в главных сечениях и могут быть представ­
лены в следующем виде:
где
1=
( 1)
'1
0
0'
0
1
0
0
0
1
0
-1
-Г
+ 1
-1
0
-1
+1
0
■
;
п х=
•р = [г 1 h г'3]т; ix = [«4 h *в]т; т — знак транспонирования матрицы, позво­
ляющий для удобства записи столбец представить в виде строки.
В каждое уравнение системы входит единственный ток ребра, поэто­
му можно выразить токи ребер через токи хорд:
ip
~
—П х
i х.
Матрица главных
к о н т у р о в . Каждый главный контур
состоит из одной хорды, которая не входит в другие контуры, и несколь­
ких ребер. Поэтому число главных контуров равно числу хорд Nx и урав­
нения равновесия напряжений в главных контурах являются независи­
мыми. На рис. 7,в,г,д показаны три главных контура (4, 5, 6 ), соответст­
вующих выбранному дереву.
Матрицу главных контуров Г можно представить в виде табл. 3 размером
[7VB- (N y- 1)] х N mi-я строка которой соответствуют главному контуру, aj - й
столбец — ветви графа. Каждый элемент ад этой матрицы равен:
=> + 1, если направление j -й ветви совпадает с направлением обхода кон­
тура;
=> - 1, если направление j -й ветви не совпадает с направлением обхода
контура;
=> 0 , если ветвь не входит в главный контур.
Матрицу Г можно разбить на две части: подматрицу Гр порядка Nx х N p,
которая получается из матрицы главных контуров исключением всех
хорд, и единичную матрицу порядка Nx: Г = [Г р 1]. Каждая i-я строка
подматрицы Г р показывает, какие ребра входят в главный контур, обра­
зованный замыканием соответствующей хорды, a j -й столбец — в какие
контуры входит /-е ребро.
Таблица 3
Ветви — /
Гл. контуры
(хорды — ;')
Ребра ГГ„1
Хорды [1]
4 (щ)
5(«s)
6 (« 6)
-1
3 (щ)
+1
+1
0
0
+1
+1
-1
0
+1
0
+1
+1
0
0
0
+1
Ки.)
2 («2)
4
0
5
6
Элементы ау матрицы Г являются коэффициентами уравнений, кото­
рые составляются по закону Кирхгофа для напряжений в главных конту­
рах и могут быть представлены в следующем виде:
Ги = [Г
1]
Г рИр+ и х = 0 ,
где
"
( 2)
0
'1
-1 + Г
0
0'
1= 0 1 1
0 0 1
+ 1 -1 ;
+1 +1 0
+1
[M l u 2 м 3] т ; u x = [ м 4 U s 4 ] т ; т —
знак транспонирования матрицы.
В каждое уравнение системы входит одно напряжение хорды м7, по­
этому с помощью матрицы Г х напряжения хорд можно выразить через
Up =
напряжения ребер:
их = - Г х ip.
Связи между топологическими матрицами. Из выражений (1), (2)
следует, что между подматрицами главных сечений Г1х и главных конту­
ров Гр существует следующая связь:
(3)
Г р = - П хт или П х = - Г рт.
Используя (3), можно установить связи между Г и П:
(4)
П Г Т= [1 П х
(5)
Г П т = [Г
1]
п
Г ; + П х = 0;
=г„ +щ =о.
Связи (3)— (5) являются следствием того, что выбранное дерево одно­
значно определяет как главные контуры, так и главные сечения.
Для получения любой топологической матрицы достаточно знать
матрицу соединений А и ее части А р и А х, относящиеся к ребрам и
хордам (табл. 1 ), так как в ней содержится полная информация о
графе. Различные связи между топологическими матрицами приве­
дены в [16].
Рассмотрим вопросы формирования уравнений цепи [ 8 ].
Уравн ен и я узловы х напряжений. Составим уравнения для узловых
напряжений, полагая, что все источники ЭДС в цепи преобразованы в
эквивалентные источники тока, и используя:
=> компонентные уравнения ( YBU B = /в) для пассивных ветвей
(6 )
Y BUB= I B;
=> уравнения Кирхгофа для токов ветвей цепи
((7)
7)
A I = [А „ А .,] *■ = A BI B+ A , J B= 0 ;
=> уравнения для напряжений на всех ветвях цепи
(8)
U = A TU„ или
= К
U „;
где I B, UB— векторы токов и напряжений пассивных ветвей (компонен­
тов); Y B— диагональная матрица проводимостей; А — матрица инциденций, в которой выделены подматрица (блок) А в пассивных ветвей и под­
матрица A j источников тока; JB — вектор известных источников тока;
U — вектор напряжений на всех ветвях цепи; U„ — вектор узловых на­
пряжений; Uj — вектор напряжений на источниках тока; т — знак транс­
понирования; п — номера узлов.
В ы в о д . Подставим 1в(6) в (7):
(9)
A Y BUB= - A A .
Подставив UB (10) в (9), получим окончательную форму уравнений
узловых напряжений цепи
(12)
Y U „= J „,
где Y — матрица узловых проводимостей; J„ — вектор эквивалентных
узловых источников тока:
(13)
Y = A BY BA BT ; J„ = - A j J B.
Напряжения U/ (1 1 ) на источниках тока определяется после того, как
будут найдены узловые напряжения U„.
П р и м е р . Для цепи, схема и граф которой представлены на рис. 8 ,
определим с помощью (13) входящие в уравнения (12) матрицу Y прово­
димостей и вектор J„ узловых источников тока.
Используя граф на рис. 8 ,6 , по изложенной выше методике составим
матрицу инциденций (табл. 4).
Таблица 4
Ветви - /'
Гл.сечения
(узлы - г)
I
3 (/,)
2 (Ь.)
1 (ii)
Источники
Хорды [Ах]
Ребра [1]
0
4 ( 14)
+1
5 (/5)
6 Об)
А
J2
h
+1
0
-1
0
0
+1
0
11
0
+1
0
0
-1
+1
0
0
+1
III
0
0
+1
-1
0
-1
0
-1
-1
Вычисляем проводимость Y = A BY BA„T (13) как произведение трех
матриц. Такая операция может выполняться в любой последовательно­
сти, если число столбцов каждой матрицы равно числу строк соседней
матрицы справа.
0
1
0
0
1
Y = 0
1
0
0
0
0
1
- 1
1
-1
-к
0 -1
0
1
1
1
0
0
0
1
0
0
1
0
-1
0
1 -1
0
0
0
y3
0
0
0
y4
0
0
0
0
Y5
0
0
0
0
0
Y4
o' v ,'
0
0
0
0
0
-y 6
"1 0
0
0
0
r ,+ r 5 + r 6
-n
0
y2
J2 =
У з.
Y6
............. —1
=
0
0
-
'г. + П + П
0
0
1
J
'1
0
o'
-1
0
0
0
0
1 -1
n+n+n .
A
- J3
J2 + */3
Рис. 8 . Схема (а) и граф (б), используемые для иллюстрации составления
уравнений узловых напряжений
Уравнения контурных токов. Составим уравнения для контурных
токов, полагая, что все источники тока в цепи преобразованы в эквива­
лентные источники ЭДС и используя:
=> компонентные уравнения ( Z B/B= {/в) для пассивных ветвей
(14)
Z BI„= UB;
=> уравнения закона Кирхгофа для напряжений
(15)
Г И = [ Г £ Г , ] М = Г « Е . + Г.11.=0;
=> уравнения для токов ветвей цепи
1
1
U
UJ
или
I
1
ев
где I„, U B
.
ь
1 к
и
__________________
1=Г1
(-
1
1
(16)
векторы токов и напряжений пассивных ветвей (ком­
1
понентов); Z B— диагональная матрица сопротивлений; Г — матри­
ца главных контуров, дополненная источниками ЭДС. В ней выде­
лены подматрица (блок) Г в пассивных ветвей и подматрица Г £ ис­
точников ЭДС; Е„ — вектор известных источников ЭДС; I — век­
тор токов ветвей (для всех ветвей цепи); 1х — вектор токов хорд; 1 £
— вектор токов, протекающих через источники ЭДС; т — знак
транспонирования.
В ы в о д . Подставим UB(14) в (15)
(17)
г г „ 1в = - Г £Ев.
Из (15) получаем
(18)
1В= Г'1Х;
(19)
I e = I Y I x.
Подставив 1в (5) в (4), получаем уравнения контурных токов цепи
(20) Z 1х= 1в,
где Z
матрица сопротивлений; Ек — вектор эквивалентных источни­
ков ЭДС контуров:
(21)
Z = r Z Br T; Ек= - Г £Ев,
Токи 1£ (19), протекающие через источники ЭДС определяется после
того, как найдены токи хорд 1х.
П р и м е р . Для цепи, схема и граф которой представлены на рис. 9,
определим с помощью (21) входящие в уравнения (20) матрицу Z сопро­
тивлений и вектор Ек эквивалентных источников ЭДС контуров.
5-1881
Рис. 9. Схема (а ) и граф (б), используемые для иллюстрации составления
уравнений контурных токов
И с п о л ь з у я граф на рис. 9,6, п о и зло ж е н н о й вы ш е м е т о д и к е составим
м а тр и ц у гл а в н ы х к о н ту р о в (т а б л . 5).
Таблица 5
Ветви - j
Гл. контуры
Хорды [А , ]
Ребра [1]
Источники
(хорды - 0
Е2
Ез
1 (h )
2 (i2)
3 (/з)
4 0’4)
5 (к )
6 Об)
4
0
+1
0
0
+1
+1
+1
0
0
5
-1
0
0
-1
-1
0
0
+1
0
6
-1
-1
+1
-1
-1
-1
0
0
+1
Вычисляем сопротивление Z - ГХВГ ( 2 1 ):
0 0 0 0 o' '0 -1 - Г
0 z 2 0 0 0 0 1 -1 -1
1 1 0 1
1
0
0 0 2з 0 0 0 1 0 -1
0 0 1 0
Z = -1 -1
0
0 0 1 0
0 0 0
0 0 1
-1 -1 -1
1 0
0 0 0 0 Z5 0 0
1
0
0 0 0 0 0 z 6_ 0
Z 2 + Z 3+ Z 4
-Z 2
-z ,-z ,
Z2 z 3
-Z 2
z, + Z 2 + Z 5
^1
2
Z, + Z 2+ Z 3+ z 6
Определяем вектор контурных ЭДС (20):
_
Раз дел 2
НЕЛИНЕЙНЫЕ ЭЛЕМЕНТЫ И ЦЕПИ
5. ПОЛУПРОВОДНИКОВЫЕ ПРИБОРЫ
5.1. Электропроводность полупроводников
Классификация твердых тел по электропроводности. По э л е к ­
т р о п р о в о д н о с т и твердые тела разделяют на три группы:
=> проводники, к которым относят металлы и их сплавы с малым удель­
ным электрическим сопротивлением (р < 10" 4 Ом-см), например,
алюминий
р = 2,63- 10 6 Омсм, медь — р = 1,72 10 6 Ом-см, сереб­
ро — р = 1,62 10'6 Ом-см;
=> диэлектрики, имеющие чрезвычайно большое удельное сопротивле­
ние (р > 109 Ом-см), например, янтарь — 5-10 16 Ом-см, слюда —
1,3-10 14Ом-см, стекло— М О 14 Ом-см;
полупроводники, удельное сопротивление которых лежит в пределах
10' ...109 Ом-см (германий — 45 Ом-см, кремний — 23-104 Ом-см, арсенид галлия
4-108 Ом-см), частично перекрываясь с удельными со­
противлениями проводников и диэлектриков.
Механизм электропроводности в твердых телах. Для выявления
причины различия в свойствах проводников, полупроводников и диэлек­
триков рассмотрим в общих чертах механизм проводимости в твердых
телах.
Известно, что атом любого вещества состоит из атомного ядра с по­
ложительным зарядом и вращающихся вокруг него отрицательно заря­
женных электронов. Орбиты электронов удалены на различное расстоя­
ние от атомного ядра и группируются в электронные оболочки. Электро­
ны внешней оболочки, или валентные электроны, являются наиболее
активными, так как связаны с атомным ядром гораздо слабее внутренних
электронов. Взаимодействие валентных электронов обеспечивает соеди­
нение атомов в молекулы или в кристаллическую решетку.
Электропроводность
м е т а л л о в . В металлах внеш­
ние электронные оболочки атомов перекрываются в столь сильной степе­
ни, что атомы могут свободно обмениваться электронами. Электроны
внешней оболочки не имеют жесткой связи с каким-либо определенным
атомом или группой атомов и могут свободно перемещаться в объеме.
В отсутствие приложенного напряжения электроны совершают сложное
хаотическое тепловое движение. Через сечение металлического провода в
единицу времени проходит одинаковое количество электронов в обе стороны,
что свидетельствует об отсутствии тока. Если подсчитать число электронов,
проходящих через это сечение, то окажется, что число электронов, проходя­
щих слева направо, всегда будет равно числу электронов, проходящих справа
налево. А это значит, что электрического тока в этом объеме металла нет.
Если к проводнику подключить источник напряжения, то под дейст­
вием сил электрического поля электроны изменят траекторию своего
движения. Такое упорядоченное движение электронов в электрическом
поле носит название дрейфа. Дрейф электронов в электрическом поле,
т.е. упорядоченное движение зарядов в одном направлении, представляет
собой электрический ток. Следует иметь в виду, что за техническое на­
правление тока «о т плюса к минусу во внешней цепи» принимается на­
правление движения положительных носителей заряда (дырок). Электро­
ны, являющиеся отрицательными носителями заряда, будут двигаться в
обратном направлении. Таким образом, в процессе переноса тока в ме
таллах участвуют валентные электроны, количество которых при любой
температуре равно числу атомов в данном объеме металла ( = 1 0
см )
или больше него. Этим обусловлено малое сопротивление металлов.
Электропроводность
д и э л е к т р и к о в . В обычных
условиях в диэлектриках практически нет свободных носителей зарядов.
Их весьма малая электропроводность носит ионный характер и определя­
ется ничтожным числом ионов, входящих в состав диэлектрика.
Электропроводность
полупроводников.
Рас­
смотрим поведение валентных электронов в таких широко распростра­
ненных полупроводниках, относящихся к четырехвалентной группе, как
кремний (или германий), внешняя электронная оболочка атома которого
содержит четыре электрона. Каждый из этих электронов образует с че­
тырьмя соседними атомами парно электронные, или ковалентные, связи
(рис. 1 ,а), причем каждая пара электронов движется по одной орбите,
охватывающей оба атома (рис. 2,а). Эти связи являются устойчивыми.
Такая пара электронов жестко связана со своей парой атомов и не может
свободно перемещаться в объеме полупроводника. Так как все валентные
электроны задействованы в ковалентных связях, в полупроводнике не
остается свободных носителей заряда и при температуре, близкой к абсо­
лютному нулю, он является хорошим диэлектриком. Для выявления и
рассмотрения механизмов электропроводности полупроводника восполь­
зуемся его зонной моделью, которая может быть представлена в виде
энергетической диаграммы (рис. 1 ,6 ), содержащей валентную зону, зону
проводимости и расположенную между ними запрещенную зону шири­
ной AW. При комнатной температуре для кремния ширина запрещенной
зоны A W — 1,12 эВ, для германия — AW = 0,66 эВ. При сообщении элек­
трону некоторого количества энергии, превышающего A W, он может пе­
рейти из валентной зоны (покинув ковалентную связь) в верхнюю неза­
полненную зону и превратиться в свободный носитель заряда. В этой
зоне электрон приобретает возможность изменять свою энергию под дей­
ствием сил электрического поля, т.е. в этой зоне электрон становится
электроном электропроводности. Поэтому верхняя зона свободных элек­
тронов получила название зоны проводимости. После перехода электро­
нов в зону проводимости в валентной зоне появляются вакантные уров­
ни, которые могут занимать другие электроны. Они могут участвовать в
процессе протекания тока через кристалл.
W
Г
ДW
L
Зона
проводимости
Запрещенная
зона
Валентная зона
б)
*
Рис. 1 . Ковалентные связи (а) в полупроводнике и его зонная модель (б)
Таким образом, имеют место два механизма проводимости:
=> за счет движения свободных электронов в зоне проводимости;
—•> 33 счет движения валентных электронов в валентной зоне.
Рассмотрим влияние температуры и примесей на электропроводность
полупроводников.
Влияние температуры на электропроводность
полупроводников.
С повышением температуры атомы начинают совершать тепловое колеба­
тельное движение. Энергия атомов передается электронам. Для некоторых
электронов этой энергии оказывается достаточно, чтобы оторвать их от сво­
их атомов. Оторвавшийся от своего атома электрон свободно перемещается
внутри объема полупроводника (рис. 2,а, б), т.е. становится свободным но­
сителем тока. Электропроводность полупроводника возрастает, так как уве­
личивается количество электронов, покидающих связи. Однако общее коли­
чество электронов, являющихся свободными носителями тока, остается во
много миллионов раз меньше числа атомов. Этим объясняется количествен­
ное различие в проводимости полупроводников и металлов.
Зона проводимости
------ ? ------ 1—
ДW
—
А—
Валентная зона
Рис. 2. Влияние температуры на электропроводность полупроводников
Уход электрона приводит к частичной ионизации двух соседних атомов.
Появляющийся при этом единичный положительный заряд, равный по абсо­
лютной величине заряду электрона, относят не к тому или иному атому, а к
дефектной связи, оставленной электроном. Такой положительный заряд
принято называть дыркой, представляющей собой вакантное место для элек­
трона валентной зоны, а возможно, и зоны проводимости.
Переход электрона из заполненной связи в дефектную связь соответствует
перемещению дырки в обратном направлении. При отсутствии в кристалле
электрического поля процесс заполнения дефектных связей (дырок электро­
нами) носит случайный характер, траектория движения дырки подчиняется
законам хаотического движения. Если поместить кристалл в электрическое
поле, то дырка будет перемещаться вдоль линий электрического поля. На­
правленное перемещение дырки (положительного заряда) в электрическом
поле есть протекание электрического тока, хотя, строго говоря, носителями
заряда являются электроны. Однако практически гораздо удобнее рассматри­
вать непрерывное движение положительного заряда, образующегося в де­
фектной связи, чем поочередное движение электронов из связи в связь.
Таким образом, нарушение валентной связи за счет тепловой энергии
приводит к появлению в кристалле полупроводника двух свободных но­
сителей заряда: отрицательного единичного заряда — э л е к т р о н а , и
противоположного ему по знаку положительного единичного заряда —
д ы р к и . Электропроводность, возникающая в кристалле полупро­
водника за счет нарушения валентных связей, называется собственной
электропроводностью.
Появление электрона в зоне проводимости и дырки в валентной зоне
на энергетической диаграмме представлено на рис. 2,в. Стрелкой условно
обозначен переход электрона из валентной зоны в зону проводимости.
В валентной зоне осталась дырка.
Влияние примесей на электропроводность полупроводников. По­
мимо температуры на электропроводность полупроводников в сильной
степени влияют примеси. Добавка примеси в полупроводник называется
легированием. Рассмотрим два случая.
Введем в структуру идеального полупроводника атом вещества
V группы (например, сурьмы), имеющий во внешней оболочке не четыре,
а пять валентных электронов. Пятый электрон в данном случае окажется
избыточным и будет значительно слабее связан со своим атомом
(рис. 3,а). Для его высвобождения и перевода в зону проводимости (пре­
вращения в свободный носитель заряда) требуется значительно меньшее
количество энергии AW'D (рис. 3,6), чем AW для высвобождения электрона
из валентной связи. Поэтому уровни, на которых находятся такие элек­
троны при очень низких температурах, располагаются в запрещенной
зоне вблизи от дна зоны проводимости (рис. 3,6), и уже при незначитель­
ном повышении температуры они получают количество энергии, доста­
точное для перехода в зону проводимости. Энергия A Wq, затрачиваемая
для переброса избыточного электрона в зону проводимости, называется
энергией активации примеси.
Уход избыточного электрона превращает атом сурьмы в положитель­
ный ион, который будет прочно связан с кристаллической решеткой ве­
щества и не будет перемещаться подобно дырке. Таким образом, наличие
в кристаллической решетке кремния (германия) примесного
V группы
атома
=> привело к появлению в зоне проводимости свободного электрона;
=> не оставило дефектной связи (дырки) в валентной зоне.
Следует отметить, что избыточный электрон может занять место дыр­
ки в валентной зоне (рис. 3 ,а).
Зона проводимости
О
О
О
О
О
о
------------------- WB
Валентная зона
б)
Рис. 3. Влияние донорных примесей
на электропроводность полупроводников
Увеличение примесных атомов сурьмы в кремнии (германии) приводит к
повышению концентрации свободных электронов без увеличения количест­
ва дырок, как это имело место в случае собственной электропроводности.
Когда концентрация электронов значительно превысит концентрацию ды­
рок, электроны становятся основными носителями заряда, а дырки — неос­
новными. Можно считать, что в таком кристалле ток в основном переносится
электронами. Примеси, способные отдавать электроны в зону проводимости,
называются донорными примесями, или донорами.
Рассмотрим другой случай, когда в кристаллическую решетку кремния
(германия) вводится атом III группы периодической системы элементов,
например галлий, внешняя электронная оболочка которого содержит все­
го три валентных электрона. В кристаллической решетке элементов
IV группы атом галлия заполняет только три валентные связи, четвертая
связь остается незаполненной. Однако незаполненная связь не несет за­
ряда, и атом галлия и смежный с ним атом кремния являются электриче­
ски нейтральными. При небольшом тепловом возбуждении электрон од­
ной из соседних заполненных валентных связей или свободный электрон
валентной зоны (рис. 4,а) может перейти в эту связь. Во внешней обо­
лочке галлия при этом появляется лишний электрон, атом галлия теряет
свою электрическую нейтральность и превращается в отрицательный
ион. Нарушается и электрическая нейтральность в той связи, откуда элек­
трон перешел в дефектную связь галлия. В этой связи появляется поло­
жительный заряд — дырка. Таким образом, с введением в кремний (гер­
маний) примеси III группы повышается концентрация дырок. При доста­
точной концентрации атомов такой примеси дырки станут основными
носителями, а электроны — неосновными носителями.
Зон а проводи м ости
О
О
I»
О
о
о
В алентн ая зона
а)
б)
Рис. 4. Влияние акцепторных примесей
на электропроводность полупроводников
Введение атома галлия в решетку элементов IV группы приводит к
появлению свободного уровня вблизи от потолка валентной зоны. При
низких температурах этот уровень остается свободным. При небольшом
повышении температуры один из валентных электронов покидает ва­
лентную зону и занимает этот уровень, оставляя после себя в валентной
зоне свободный уровень — дырку (рис. 4,6). Примеси, способные прини­
мать на свои уровни валентные электроны, называются акцепторными
примесями, или акцепторами.
Таким образом:
=> донорные примеси за счет эмиссии электронов с донорных уровней в
зону проводимости обеспечивают электронную электропроводность
полупроводников. Их называют полупроводниками с электронной
электропроводностью, или полупроводниками «-типа (от латинского
negative — отрицательный);
=> акцепторные примеси, принимая валентные электроны на акцеп­
торные уровни, приводят к появлению в полупроводниках дыроч­
ной электропроводности. Их называют дырочными полупроводни­
ками, или полупроводниками p -типа (от латинского positive — по­
ложительный).
Примесная (электронная и дырочная) проводимость обычно значи­
тельно превосходит собственную проводимость полупроводника. Избы­
точные для данного полупроводника носители заряда называются основ­
ными, носители заряда противоположного знака — неосновными. В по­
лупроводнике с электронной проводимостью основными носителями
заряда являются электроны, в полупроводнике с дырочной проводимо­
стью — дырки.
5.2. Электронно-дырочный переход
Краткие сведения об электрических переходах. Электрическим пере­
ходом называют приконтактный слой на границе двух сред (тел) с разными
электрофизическими свойствами. В полупроводниковых приборах (сюда же
относятся микросхемы) электрическими переходами служат неоднородные по
электрофизическим свойствам монокристаллы, содержащие области собст­
венно полупроводника, области полупроводника с донорными и акцепторны­
ми примесями, области между полупроводниками с разными типами элек­
тропроводности и с различной степенью легирования, области между полу­
проводником и металлом, полупроводником и диэлектриком. Работа любого
полупроводникового прибора основывается на процессах, происходящих в
электрических переходах.
Переходы между двумя областями полупроводника одного и того же
типа электропроводности, но с различными значениями удельной элек­
трической проводимости, называют изотипньши переходами. Различают
изотипные электронно-электронные (и—и+) и дырочно-дырочные (р -р + )
переходы, где знаком « + » отмечена область с более высокой удельной
электропроводимостью, полученной за счет большей концентрации при­
месей. В зависимости от используемых в электрических переходах мате­
риалов, их разделяют:
=> на гомогенные переходы, или гомопереходы, созданные в одном
полупроводниковом материале, например только в кремнии (Si);
=> на гетерогенные переходы, или гетеропереходы, создаются на
границе различных полупроводниковых материалов: германий
крем­
ний, кремний — арсенид галлия и т.д.
Особую роль в создании полупроводниковых приборов играют переходы
между двумя областями полупроводника с разными типами электропроводно­
сти, одна из которых имеет электронную, а другая — дырочную проводи­
мость. Такие переходы называют электронно-дырочными переходами, или
р-п-переходами. Неотъемлемой частью полупроводникового прибора являют­
ся переходы металл — полупроводник, используемые в качестве выводов.
Электронно-дырочные переходы классифицируют по степени изме­
нения концентрации в приграничной области перехода и по соотноше­
нию удельных сопротивлений слоев.
По степени изменения
к о н ц е н т р а ц и и различают:
ступенчатые р—«-переходы, по одну сторону которого находятся доноры с
постоянной концентрацией N%, по другую — акцепторы с постоянной кон­
центрацией Na. Для изготовления ступенчатых переходов используют тех­
нологию сплавления. На поверхности пластинки, например, полупровод­
ника «-типа укрепляют небольшую таблетку элемента III группы и поме­
щают в печь, где происходит ее нагрев до температуры ниже точки плав­
ления полупроводника, но выше точки плавления примеси. В результате
этого происходит вплавление в определенную область кристалла акцеп­
торной примеси и формирование /^-«-перехода. Изготовленные по этой
технологии переходы часто называют ставными р—«-переходами;
=> плавные ^-«-переходы, у которых концентрация в приграничной об­
ласти плавно изменяется от Ад до N A. Для изготовления плавных р -п переходов используют метод диффузии. При этом полупроводнико­
вую пластинку с защитным окисным слоем предварительно обраба­
тывают, создавая «окна» заданной конфигурации на ее поверхности, а
затем через них проводят диффузию примесей.
По
соотношению
концентраций
р - и п- слоях переходы разделяются:
примесей
в
==> на симметричные р-и-переходы, для которых концентрация примесей
в р - и п- слоях удовлетворяет соответственно условиям Na „~ N Ap;
=> на несимметричные или односторонние р-й-переходы, для которых
Л'дя » NAp или
« NAp, т.е. концентрации примесей различаются на
1 -2 порядка. Односторонние переходы обозначают символами п - р или р +-п.
В полупроводниковой технике применяются несимметричные р—ппереходы. Поэтому рассмотрим несимметричный р -п -переход при сле­
дующих предположениях:
=> переход находится при комнатной температуре ( Т = 300 К);
=> все атомы примесей ионизированы, следовательно, число основных но­
сителей в соответствующих областях кристалла будет pp ~ N a, п„ ~ N d, при
этом рр » п„\
=> число неосновных носителей, связанное с термогенерацией, опреде­
ляется неравенствами: пр « рр ; р„ « п„.
=> распределение примесей носит ступенчатый характер.
Равновесное состояние/ь-я-перехода. На рис. 1,а показан кристалл,
в котором левая часть объема имеет дырочную проводимость, правая —
электронную проводимость.
Механизм
д и ф ф у з и и . При отсутствии внешнего напря­
жения в приконтактных областях будет происходить диффузионное вы­
равнивание концентрации подвижных носителей зарядов:
=> дырки начнут перемещаться из p -области, в которой их много, в
«-область, где их мало;
=> электроны перемещаются в противоположном направлении: из
«-области с высокой концентрацией в р-область с малой концентраци­
ей электронов.
В результате через границу раздела полупроводниковых сред течет
ток диффузии /дИф = /дифр + /дифт направление которого совпадает с на­
правлением диффузии дырок.
Диффузия нейтральных ча­
стиц приводит к полному вы­
равниванию их концентрации по
/о
h
всему объему вещества. Однако
дырки и электроны несут проти­
воположные заряды. Поэтому
вызванное диффузией перерас­
пределение зарядов приводит к
образованию в граничной облас­
ти контактного напряжения
£/к= 0,4...0,7В (рис. 1 ,6 ): об­
ласть р, теряющая дырки и при­
обретающая электроны, заряжа­
ется отрицательно, а область п,
теряющая электроны и при­
обретающая дырки, заряжается
положительно (рис. 1,а). Отме­
тим важную роль, которую иг­
рает контактное напряжение:
напряжение UK является по­
тенциальным барьером для
основных носителей и за­
Рис. 1. Равновесное состояние
трудняет диффузию дырок
^-«-перехода
в «-область и электронов в
/з-область. Поэтому выравнивание концентрации дырок и электронов
проводимости по объему кристалла не происходит. На рис. 1,в пока­
зано распределение концентрации подвижных носителей вдоль струк­
туры кристалла;
• контактное напряжение создает благоприятные условия для перехода
неосновных носителей из одной области в другую. Некоторые элек­
троны проводимости в p -области, совершая беспорядочное тепловое
движение, подходят к граничной области, захватываются электриче­
ским полем и переходят в «-область (рис. 1,а). То же самое происхо-
дит с дырками «-области, которые, совершая тепловое движение, за­
хватываются полем и переходят в /7-область. Ток /0, создаваемый не­
основными носителями, называют дрейфовым, или тепловым, током.
Отметим его характерные особенности. Тепловой ток /0:
•
•
имеет электронную и дырочную составляющие / 0 = / 0 „ + /ор;
не зависит от контактного напряжения UK, т.е. является током на­
сыщения неосновных носителей;
•
имеет весьма малое значение из-за низкой концентрации неоснов­
ных носителей;
•
по своему направлению противоположен току диффузии /диф, по­
этому результирующий ток I = 1тф- /0. При динамическом равно­
весии контактное напряжение затрудняет диффузию основных но­
сителей настолько, что ток диффузии становится равным по абсо­
лютной величине тепловому току, поэтому результирующий ток
/ — -/диф ~ I
q
~~ 0 .
Механизм
образования
р - я - п е р е х о д а . Вблизи
границы соприкосновения сред с р- и «-проводимостями основные
носители при встречной диффузии усиленно рекомбинируют (элек­
трон поглощает дырку и наоборот). Это приводит к ионизации атомов
примеси и образованию так называемой области пространственного
заряда.
На рис. 1,а кружочками со знаком « + » помечен положительный про­
странственный заряд ионизированных доноров, а со знаком « - » — отри­
цательный пространственный заряд ионизированных акцепторов. Запираю­
щий слой, образующийся на границе двух полупроводниковых сред с раз­
личным типом проводимости, называют электронно-дырочным переходом
или сокращенно р—п-переходом. Электронно-дырочный переход представ­
ляет собой слой, обедненный подвижными носителями, поэтому обладает
относительно малой удельной проводимостью.
Т о л щ и н а / ^ - « - п е р е х о д а . Средняя глубина проникновения
дырок в я-область при диффузии зависит от концентрации электронов в
этой области. Чем ниже концентрация электронов, тем больше время
жизни дырок в «-области, тем на большую глубину они проникают, тем
меньше там концентрация электронов проводимости и наоборот. Это
объясняется большим или соответственно меньшим временем жизни ды­
рок в этой области. Такое утверждение справедливо и для средней глуби­
ны проникновения электронов проводимости, диффундирующих в
р-область. Следовательно, толщина запирающего слоя, или /«-«-перехода,
зависит от концентрации примесей в р и п областях.
Для рассматриваемого несимметричного р— «-перехода концентрация
примеси
в /з-области
на
2...3
порядка
больше,
чем
«-области
(N a ~ р р» Nd ~ «„), поэтому запирающий слой практически сосредоточен
в «-области с малой концентрацией примеси (рис. 1,а). Выражение для
его толщины имеет вид:
о)
где d„ — толщина, занимаемая слоем в «-области; Ео — абсолютная ди­
электрическая проницаемость вакуума; е — относительная диэлектриче­
ская проницаемость кристалла; е — элементарный заряд; Na~ p p — кон­
центрация акцепторной примеси; UK— контактное напряжение.
Емкостные
с в о й с т в а / з - « - п е р е х о д а . Запирающий
слой, обладающий диэлектрическими свойствами, образует емкость, на­
зываемую барьерной, или зарядной, которая определяется как емкость
плоского конденсатора:
С6ар = е0еs/d [Ф],
где s — площадь р-«-перехода, м2; d — его толщина, м.
Состояние />-и-перехода при обратном включении. При обратном
включении к р-я-переходу подводится внешнее напряжение U, совпадаю­
щее с полярностью контактного напряжения (рис. 2,а), что соответствует
увеличению прикладываемого к переходу напряжения (Ур_„ = UKOK+ U и на­
пряженности электрического поля в запирающем слое (рис. 2,6). Отметим
характерные особенности этого состояния.
Обратное
включение
j
^
^
____
Прямое
включение
/0
/д
Рис. 2. Состояние р-и-перехода при обратном (а, б) и прямом (в, г) включениях
/д„ф
Диффузия основных носителей затрудняется настолько, что ток диффузии
практически обращается в нуль и результирующий ток /^-«-перехода
I = /диф - /о = - /о= const
оказывается примерно равным току насыщения неосновных носителей.
Кроме того, под действием внешнего напряжения U от р—«-перехода от­
тягиваются основные носители, что приводит к некоторому снижению их
концентрации в приконтактных областях, и толщина запирающего слоя
увеличивается. При несимметричном переходе увеличение толщины за­
пирающего слоя произойдет в основном за счет области с меньшей кон­
центрацией примеси (рис. 2 ,а), т. е.
(2 )
d ~ d „ ~ a nJ U ^ U , г д е а
=
Ё р £ (1 ).
V eNd
Состояние />-я-перехода при прямом включении. При прямом вклю­
чении к /^-«-переходу подводится внешнее напряжение U, не совпадающее с
полярностью контактного напряжения (рис. 2 ,в), что соответствует умень­
шению прикладываемого к переходу напряжения U^„ = UKOH - U и напря­
женности электрического поля в запирающем слое (рис. 2,г). Отметим ха­
рактерные особенности этого состояния:
=> уменьшается толщина запирающего слоя;
=> снижается потенциальный барьер, благо­
даря чему облегчается диффузия основ­
ных носителей и увеличивается диффузи­
онная составляющая тока:
/диф
= /о exp Ukрг,
>я
о
где фт = е/(к Ту, е — заряд электрона, к — посто­
янная Больцмана, Г — абсолютная температура.
Независимо
от
напряжения
на
s
05
ё
р -п -
L
переходе в полупроводниковом кристалле
под воздействием тепла происходит термоге­
нерация и возникает определенное число пар
электрон — дырка. Поэтому через переход
всегда течет тепловой ток /0. Следовательно,
результирующий ток через переход
и
Обратный ток
Рис. 3. Вольтамперная
характеристика р-я-перехода
/ = - /о+ /о ехр t/Лрт = / 0 (ехр С//фт - 1 ).
На рис. 3 представлена вольт-амперная характеристика /^-«-перехода
I= F (U ), имеющая четко выраженный вентильный эффект — большой ток при
прямом смещении и весьма малый ток при обратном напряжении на переходе.
5.3. Полупроводниковые диоды
Общие сведения. К д и о д а м относят полупроводниковые приборы
с одним электрическим переходом и двумя выводами. В большинстве
типов полупроводниковых диодов используется рассмотренный выше
несимметричный р—и-переход, в котором:
=> область с большей концентрацией основных носителей (например,
область р с концентрацией рр» п „ ) является сравнительно низкоом­
ной, и ток через диод при прямом включении /^-«-перехода определя­
ется потоком ее основных носителей. Поэтому низкоомную область
полупроводникового кристалла диода называют эмиттером;
=> область с низкой концентрацией основных носителей (например, об­
ласть п с концентрацией п„ « рр) является высокоомной. Из-за боль­
шого различия в концентрации основных носителей р-и-переход
практически целиком расположен в высокоомной области. Эта об­
ласть получила название базы.
О вольт-амперных характеристиках диодов. Вольт-амперные ха­
рактеристики (В А Х ) полупроводниковых диодов отличаются от характе­
ристики электронно-дырочного перехода, приведенной на рис. 3 в пара­
графе 5.2. Рассмотрим причины отличий.
В области
прямых
токов
отличия связаны с тем, что
часть внешнего напряжения, приложенного к выводам диода, падает:
=> на объемном сопротивлении базы R& которое определяется ее геометри­
ческими размерами и удельным сопротивлением исходного материала.
Его значение может составлять от единиц до нескольких десятков Ом;
=> на сопротивлении /?в выводов диода.
Поэтому напряжение, подводимое непосредственно к р-и-переходу,
будет меньше внешнего напряжения, поступающего на выводы диода,
и В А Х диода становится более линейной и идет ниже характеристики
р-л-перехода.
В о б л а с т и о б р а т н ы х т о к о в следует учитывать:
=> размеры кристалла, которые влияют на процессы, происходящие на
его поверхности. Из-за них возникает ток утечки /у;
=> размеры ^-«-перехода, так как из-за происходящих внутри его про­
цессов возникает так называемый ток термогенерации /т, связанный
с образованием свободных носителей зарядов.
Таким образом, обратный ток полупроводникового диода складывает­
ся из теплового тока /0, тока утечки /у и тока термогенерации /т, и поэто­
му обратная ветвь вольт-амперной характеристики диода отличается от
обратной ветви /?-и-перехода.
В германиевых диодах основную роль играет тепловой ток /о, который
удваивается при увеличении температуры окружающей среды на каждые
7...10°С. С ним соизмерим и ток утечки /у, зависящий в основном от об­
ратного напряжения.
В кремниевых диодах тепловой ток / 0 удваивается при увеличении темпе­
ратуры окружающей среды на каждые 82°С, но он на 6-7 порядков ниже,
чем у германиевых диодов и в сотни раз меньше тока термогенерации и
утечки, поэтому его можно не учитывать. Основными составляющими об­
ратного тока кремниевых диодов являются токи термогенерации /т и утечки
/у, поэтому обратный ток кремниевых диодов отличается от обратного тока
германиевых диодов всего на 1,5...2 порядка. В обоих типах диодов ток
медленно возрастает при увеличении обратного напряжения.
Основные классификационные признаки диодов. В настоящее
время выпускается и находит применение широкое многообразие раз­
личных типов полупроводниковых диодов, которые можно разбить на
отдельные группы по следующим признакам:
по используемому полупроводниковому материалу: кремниевые, гер­
маниевые и арсенидгаллиевые диоды;
=> по технологии изготовления: точечные, плоскостные и диффузионные
диоды;
по принципу действия: диоды Шоттки, туннельные, лавинно-пролетные,
излучающие, фотодиоды, диоды Ганна и др.;
=> по назначению: выпрямительные, импульсные, высокочастотные дио­
ды, стабилитроны, варикапы и др.
Технология изготовления полупроводниковы х диодов. По исполь­
зуемым технологиям изготавливаются точечные, плоскостные (сплавные)
и диффузионные диоды.
Т о ч е ч н ы е д и о д ы . Для изготовления диода используется пласти­
на из полупроводника и металлическая проволока. Переход формируется в
месте контакта полупроводника с острием металлической проволоки (пру­
жины). Через контакт пропускают импульс тока в несколько ампер, который
вплавляет острие металла в полупроводник. Происходит диффузия металла в
полупроводниковую пластину и образуется полусферический р-и-переход
(рис. 1). Малая площадь перехода позволяет получить малую емкость диода и
благодаря этому увеличить рабочий диапазон частот до сотен мегагерц. Малая
площадь перехода определяет также небольшой допустимый ток диода. Типо­
вые параметры точечного диода (например, Д18): Сд= 1 пФ; Лл пр= 10 Ом;
ЛДОбр= 1 МОм; С/до6р= 20 В; тб = 50 не.
а)
Рис. 1. Точечный диод
б)
Рис. 2. Плоскостной сплавной диод
Плоскостные
с п л а в н ы е д и о д ы . Переход в таких дио­
дах формируется методом сплавления полупроводниковой пластины с ме­
таллом. На пластину исходного полупроводника накладывают металл или
сплав, содержащий донорные или акцепторные примеси (рис. 2,а). Затем
этот материал нагревают до температуры, достаточной для того, чтобы часть
полупроводника растворилась в полученном расплаве (выделенная область
на рис. 2,6). При последующем охлаждении происходит рекристаллизация
исходного полупроводника с примесью вплавленного металла и образуется
плоский р—и-переход.
Диффузионные
диоды.
Переход создается посредством
диффузии примеси, находящейся в газообразной, жидкой или твердой фазах,
в полупроводниковую пластину. Если диффузия примеси проводится через
отверстия в защитном слое, нанесенном на поверхности полупроводника, то
получают так называемый планарный р -п -переход. Диффузионные диоды
отличаются от сплавных меньшей собственной емкостью и малым значени­
ем постоянной времени (Сд = 1.. .2 пФ; т6 = 3 не).
Отметим, что при интегральной технологии в качестве диодов, как
правило, используются транзисторы в диодном включении. Наиболее
часто с этой целью используют эмиттерный переход транзистора.
Рассмотрим основные типы полупроводниковых диодов и их особенности.
Вы прям ительны е, или силовы е, диоды. Этот тип диодов использу­
ет вентильные свойства /;-«-перехода и применяется в выпрямителях пе­
ременного тока.
В настоящее время наибольшее распространение получили кремние­
вые выпрямительные диоды, которые по сравнению с германиевыми
диодами имеют:
=> во много раз меньшие обратные токи при одинаковом напряжении;
=> высокое значение допустимого обратного напряжения 1000... 1500 В
(у германиевых диодов — 100...400 В);
=> широкий рабочий диапазон температур от -60 до +150°С (у германие­
вых — от -60 до +85° С).
Основные электрические параметры выпрямительных диодов связаны
с вентильным эффектом.
=> Лфмакс — максимальный прямой ток;
=> Unp — падение напряжения при прямом смещении и заданном
прямом токе. Значение U„p открытого диода не превышает для германие­
вых диодов 0,5В, а для кремниевых — 1,5В;
=> 1 обР— ток через диод при заданном обратном смещении U06р;
=> U обр доп — допустимое обратное напряжение;
=> / max — максимально допустимая частота входного напряжения.
Выпрямительные диоды классифицируют по мощности и частоте.
По мощности:
=> маломощные (/прмакс <0,3 А);
=> средней мощности (0,3 А < /прМакс <10 А );
=> большой МОЩ НОСТИ (/прмакс > 10 А )
По частоте:
=> низкочастотные (/11ах< 103 Г’ц);
=> высокочастотные (/тах > 103Гц).
В качестве выпрямительных применяются также диоды, выполненные
на выпрямляющем переходе металл — полупроводник (диоды Шоттки).
Их отличает меньшее, чем у диодов с р-н-переходом, напряжение Unp и
более высокие частотные характеристики.
Высокочастотные и импульсные диоды. Этот тип диодов также ис­
пользует вентильный эффект и представляет собой маломощные приборы,
работающие на высоких частотах или в быстродействующих импульсных
схемах. Для импульсных диодов существенна инерционность — длитель­
ность процессов при переходе диода из открытого состояния в закрытое и
обратно. Инерционность полупроводниковых диодов связана с накоплени­
ем неравновесных носителей заряда вблизи р-н-перехода и с величиной их
барьерных емкостей. Для уменьшения инерционности диодов необходимо
уменьшать значение барьерной емкости и время жизни неравновесных
носителей заряда. Поэтому главные признаки, отличающие высокочастот­
ные и импульсные диоды от других диодов, это малое время жизни нерав­
новесных зарядов и малая площадь р-н-перехода.
Основные
электрические
параметры
высоко­
частотных и импульсных диодов можно разбить на две группы. Пара­
метры первой группы связаны с вентильным эффектом, и они аналогич­
ны параметрам выпрямительных диодов. Вторая группа параметров
характеризует инерционные свойства этих диодов:
=> емкость диода Сд — емкость между выводами диода при заданном
смещении (в современных диодах от долей пФ до нескольких пФ);
=> Лф имп макс — максимально допустимый импульсный ток через диод,
при котором обеспечивается заданная надежность диода при длитель­
ной работе;
=> U„ри„п макс — максимальное импульсное прямое напряжение;
=> /вое обр — время восстановления обратного сопротивления диода —
отрезок времени от момента прохождения тока через нуль, при пере­
ключении диода с прямого тока на импульсное обратное напряжение,
до момента, когда обратный ток диода уменьшается до заданного
уровня (/вособр составляет время от долей не до долей мкс).
Стабилитроны. Этот тип диодов предназначен для стабилизации по­
стоянного напряжения. Они работают в режиме электрического пробоя,
который наблюдается при обратном смещении диода. Используемые в
стабилитронах материалы имеют высокую концентрацию примесей, бла­
годаря этому при относительно небольших обратных напряжениях в р -п переходе возникает электрический пробой. На участке пробоя при незна­
чительном изменении напряжения ток изменяется в очень широких пре­
делах (рис. 3).
Основные
электрические
параметры
ста­
билитронов:
=> U „ — номинальное напряжение стабилизации при заданном токе (рис. 3),
которое колеблется от нескольких вольт до десятков вольт;
=> A n in , /max — минимальный и максимальный ток стабилизации;
=> гл — дифференциальное сопротивление при заданном токе;
=> Р тах — максимально допустимая рассеиваемая мощность;
=> температурный коэффициент напряжения (ТКН ) стабилизации (вы­
ражается в К-1): ТКН = Д£/ст/(£/ст АТ), где AUCT — отклонение напря­
жения стабилизации от номинального значения U „ при изменении
температуры в интервале АТ.
Варикапы. В параграфе 5.2 было установлено, что обратно смещенный
р— «-переход обладает емкостными свойствами, т.е. его можно использовать
как варикап. Значение зарядной емкости зависит от прикладываемого к пе­
реходу напряжения, позволяет применять варикап в качестве элемента с
электрически управляемой емкостью. Форма вольт-фарадной характеристи­
ки приведена на рис. 4.
Основные
капов:
электрические
параметры
вари­
=> Сном — номинальная емкость варикапа — емкость при номинальном
напряжении смещения £ ном;
=> Стах — максимальная емкость варикапа при заданном минимальном
напряжении смещения Ей
=> Cmin — минимальная емкость варикапа при заданном максимальном
напряжении смещения Е2,
=> Кс — коэффициент перекрытия по емкости, используемый для оценки
зависимости С = J(E) и равный отношению емкостей варикапа при
двух заданных значениях обратного напряжения (К с = 2... 20).
=> (?ном — номинальная добротность варикапа, представляющая собой
отношение его реактивного сопротивления к полному сопротивлению
потерь при номинальном напряжении смещения на заданной частоте;
=> Кт — температурный коэффициент емкости: относительное изменение
емкости варикапа для заданного напряжения смещения при изменении
температуры окружающей среды на 1°С в заданном интервале температур.
Anin
Рис. 3.
Вольт-амперная
характеристика
стабилитрона
Рис. 4.
Вольт-фарадная характеристика
варикапа
Вольтамперная
характеристика туннельного
диода
Диоды Шотгки. Основным элементом диодов Шотгки является элек­
тронный переход металл — полупроводник с нелинейной вольт-амперной
характеристикой. Существенная особенность диодов Шоттки состоит в том,
что протекающий в них ток обусловлен основными носителями зарядов и не
связан с инжекцией неосновных носителей зарядов и их рассасыванием. Это
обеспечивает лучшие частотные характеристики диодов Шотгки и повышает
их быстродействие. Кроме того, сопротивление барьера Шотгки при прямом
напряжении меньше прямого сопротивления р-и-перехода, поэтому падение
напряжения на диодах Шоттки оказывается значительно меньше падения
напряжения на диодах с />- и-переходом. Выпрямители с использованием
диодов Шоттки имеют более высокий КПД.
Туннельны е диоды. При очень малой толщине запорного слоя
( 1 0 ... 10 нм и меньше) наблюдается туннельный переход зарядов из ва­
лентной зоны в зону проводимости. Благодаря этой особенности ВАХ
туннельного диода имеет падающий участок A -В (рис. 5), на котором
дифференциальное сопротивление является отрицательным, что тожде­
ственно внутренней положительной обратной связи. Поэтому туннель­
ные диоды используются для генерирования колебаний.
5.4. Биполярные транзисторы
Общие сведения. Транзистором называют полупроводниковый прибор,
способный усиливать электрическую мощность. По принципу действия
транзисторы разделяются на два класса:
=> биполярные транзисторы, в основе принципа действия которых лежит
инжекция неосновных носителей. Их неотъемлемой частью являются
два взаимодействующих р-и-перехода. Термин биполярный подчерки­
вает, что в работе транзисторов участвуют оба вида носителей элек­
трических зарядов — электроны и дырки, при этом инжекция неос­
новных носителей сопровождается компенсацией их заряда основны­
ми носителями;
=> униполярные транзисторы, работа которых базируется на использовании
основных носителей только одного типа (электронов или дырок). Основ­
ным способом движения носителей является дрейф в электрическом по­
ле; процессы инжекции и диффузии практически отсутствуют.
Полупроводниковый кристалл биполярного транзистора состоит из трех
различных областей с чередующимися типами электропроводности. В зави­
симости от порядка их расположения различают транзисторы п—р —п к р —п—
р типов. В п—р —п транзисторах основную роль играют электроны, подвиж­
ность которых в два-три раза выше подвижности дырок, поэтому они имеют
лучшие характеристики по сравнению с р —п—р-транзисторами и находят бо­
лее широкое применение. Им и уделено основное внимание в дальнейшем.
Структура транзистора. Биполярные транзисторы содержат два
встречно включенных /т-я-перехода, расположенных в непосредственной
близости один от другого благодаря весьма малой толщине внутренней
p -области. Для улучшения усилительных свойств транзисторы имеют
асимметричную структуру (рис. 1,а): площадь перехода п\-р гораздо
меньше площади перехода р -п 2. Кроме того, слой щ с меньшей пло­
щадью легирован значительно сильнее, чем слой щ. Асимметрия повлия­
ла и на название крайних слоев. Слой п\ с меньшей площадью называют
эмиттером (Э), а слой п2 с большей площадью — коллектором (К).
Внутренний слой называется базой (Б). Соответственно различают
эмиттерный (П\-р) и коллекторный (р -п 2) переходы (рис. 1,а), каждый
из которых имеет донную и боковые части (рис. 1,6). Рабочей областью
транзистора является область, расположенная под донной частью слоя rt\
(она выделена пунктиром). Остальная часть структуры транзистора
(рис. 1 ,а) представляет собой пассивные участки, которые можно моде­
лировать резисторами /?к, Rs, подключенными к рабочим слоям коллек­
тора и базы. На рис. 1,6 показаны:
=> активная часть транзистора в горизонтальном положении (п+-р -п );
=> места подключения паразитных резисторов R K, ЯБ;
=> высоколегированный слой п .
Взаимодействие между эмиттерным и коллекторным переходами
обеспечивается малой шириной базы (порядка 1 мкм) по сравнению с
диффузионной длиной, составляющей 5... 10 км.
Рис. 1. Структуры биполярного транзистора и принцип его работы
Основны е режимы работы биполярного транзистора. В зависимо­
сти от полярности прикладываемого к /^-«-переходам напряжения разли­
чают четыре режима работы биполярного транзистора:
=> режим отсечки, в котором на оба перехода поданы обратные напря­
жения. В режиме отсечки через оба перехода проходят незначитель­
ные обратные токи, что эквивалентно большому сопротивлению. Это
позволяет в первом приближении считать, что между всеми выводами
транзистора будет обрыв, а токи в его внешних цепях равны нулю;
=> режим насыщения, когда на оба перехода поданы прямые напряже­
ния. В режиме насыщения через оба перехода проходит большой пря­
мой ток, что эквивалентно малому сопротивлению. Поэтому можно
считать, что в этом режиме между всеми выводами транзистора будет
короткое замыкание. Как говорят, транзистор «стягивается в точку», а
токи, проходящие через него, будут определяться только сопротивле­
ниями элементов, включенных во внешние цепи транзистора;
=> активный режим, в котором на эмиттерный переход подано прямое
напряжение, а на коллекторный — обратное. Этот режим использует­
ся при усилении сигналов, так как обеспечивает минимальные нели­
нейные искажения. Он подробно рассмотрен ниже;
=> инверсный режим, в котором на эмиттерный переход подается обрат­
ное напряжение, а на коллекторный — прямое. Из-за асимметричной
структуры транзистора он не находит практического применения.
Работа транзистора в активном режиме. Для рассмотрения этого
режима воспользуемся рис. 1,в, на котором представлена структура тран­
зистора, изображены основные потоки движения электронов и дырок,
приведена схема подключения источников напряжения к переходам.
Рассмотрим отдельные фазы процесса движения носителей через транзи­
стор, приводящего к созданию протекающих через транзистор токов.
Инжекция
электронов
в б а з у . Инжекцией называют
процесс введения неравновесных носителей. Так как источник напряжения
£эб подключен к эмиттерному и -/э-переходу в прямом направлении (минус
на эмиттере, плюс на базе), из эмиттера в базу инжектируются электроны, а
из базы в эмиттер дырки. Поскольку эмиттер легирован значительно сильнее
базы, поток электронов будет намного больше встречного потока дырок, и
поэтому он определяет основные процессы, происходящие в транзисторе.
Через эмиттерный переход протекает достаточно большой прямой ток /э.
Экстракция
электронов
в
коллекторную
о б л а с т ь . Экстракцией называют процесс отбора из приповерхност­
ного слоя части равновесных носителей (процесс, обратный инжекции).
Из-за разности концентраций инжектированные в базу электроны дви­
жутся к коллектору, стремясь равномерно распределиться по всему объ­
ему базы. Толщина базы w значительно меньше диффузионной длины L,
поэтому большинство электронов достигает коллекторного перехода, не
успевая рекомбинировать в базе. Рекомбинация — восстановление раз­
рушенной валентной связи (при встрече электрона с дыркой). Вблизи
коллекторного перехода электроны попадают под действие электриче­
ского поля этого обратно смещенного перехода. Так как электроны в базе
являются неосновными носителями, происходит экстракция, или отбор
(прохождение) электронов в область коллектора. В коллекторе электроны
становятся основными носителями зарядов и, поскольку источник на­
пряжения Екб подключен плюсом к коллектору, они легко доходят до
коллекторного вывода, создавая коллекторный ток /к во внешней цепи
транзистора. Дрейф электронов через коллекторный переход снижает их
концентрацию в области базы, что создает благоприятные условия для
инжекции эмиттером потока электронов.
Рекомбинация
части
электронов
в
базе
т р а н з и с т о р а . Как показано выше, большинство электронов, ин­
жектированных эмиттером в базу, попадает в область коллектора. Однако
небольшая часть их все-таки успевает рекомбинировать в области базы.
Рекомбинация электронов вызывает соответствующий ток во внешней
цепи — ток базы /Б. Поэтому коллекторный ток / к всегда оказывается
меньше эмиттерного /3 .
Некоторые
соотношения
между
транзи­
с т о р н ы м и т о к а м и . В активном режиме между токами биполяр­
ного транзистора существует соотношение
( 1)
/ э = /к + / Б.
Для оценки усилительных свойств транзисторов используются сле­
дующие параметры:
=> коэффициент передачи эмиттерного тока. Параметр, определяющий
долю носителей зарядов (в рассматриваемом случае электронов), ин­
жектированных эмиттером и достигших вследствие диффузии коллек­
тора:
(2)
а - А1 к/Л/э ;
=> коэффициент передачи базового тока
(3 )
(3 = Д / к / Д / Б.
Коэффициенты а и (3 являются важнейшими физическими параметра­
ми биполярного транзистора. Так как а = 1, то Р »
1. Для современных
транзисторов максимальное значение а составляет порядок 0,995, а (3 — 200.
Из (2) и (3) следует, что (3 = а /(1 — а ) или а = (3/(1 + (3).
Выражение для полного тока коллектора имеет вид:
/ к = «7Э— / ко [ехр ( С/к/фт) — 1] ~ о(1Э + 1 ко,
где / ко — тепловой ток коллекторного перехода; фт = 26 мВ.
5.5. Полевые транзисторы с управляющим переходом
Общие сведения. Разработка полевых транзисторов вызвана стремлени­
ем создания усилительного прибора с большим входным сопротивлением
(как у электронных ламп). Появившиеся значительно раньше биполярные
транзисторы управляются током, вследствие чего имеют малое входное
сопротивление. В результате исследований были разработаны транзисто­
ры, управляемые электрическим полем (напряжением), в связи с чем и
получили название полевых. Их работа основана:
=> на изменении сопротивления полупроводникового материала попе­
речным электрическим полем.
=> на использовании носителей зарядов одного вида (электронов или
дырок), из-за чего их еще называют униполярными.
Под действием поля создается проводящий слой, или канал, по кото­
рому протекает рабочий ток. Создаются д в а т и п а к а н а л о в :
=> объемные каналы, представляющие собой участки однородного полу­
проводника, отделенные от поверхности обедненным слоем. Для
транзисторов с объемным каналом характерно то, что обедненный
слой создается с помощью р —п-перехода. Управление сопротивлением
канала осуществляется с помощью электрического поля путем изме­
нения площади поперечного сечения проводящего полупроводнико­
вого слоя (ширины р —и-перехода). Отсюда следует название — поле­
вые транзисторы с управляющим р-п-переходом. В дальнейшем ис­
пользуется название полевые транзисторы,
=> приповерхностные каналы, представляющие собой либо обогащенные,
либо инверсные слои. Управление сопротивлением канала осуществляет­
ся с помощью электрического поля путем изменения удельной проводи­
мости полупроводникового слоя. Транзисторы с приповерхностным ка­
налом имеют структуру металл — диэлектрик — полупроводник (МДП).
Обычно в качестве диэлектрика используется двуокись кремния (Si02),
поэтому часто этот тип транзисторов называют МОП-транзисторами.
Это название и будет использоваться в дальнейшем.
Структура полевого транзистора. Полевой транзистор представляет со­
бой пластину полупроводника п- или р-типа, на поверхность которой нанесен
слой полупроводника с электропроводностью противоположного типа. Для
определенности будем полагать, что основная пластина состоит из полупро­
водника «-типа. На торцы основной пластины с полупроводником «-типа и
верхнюю часть полупроводника р-типа нанесены металлические пленки, к
которым приваривают или припаивают внешние выводы транзистора (рис. 1).
Электрод, обеспечивающий электрическую связь со слоем p-типа, называют
затвором (3), а электроды, подключенные к полупроводнику и-типа, — исто­
ком (И) и стоком (С). Между полупроводниками с разными типами электро­
проводности образуется /^-«-переход (заштрихованная область). Находя­
щийся под ним слой, образуемый полупроводником пластины, обладает
проводимостью и называется проводящим каналом (рис. 1,а). Поскольку
p-и-переход почти полностью лишен подвижных носителей заряда, его про­
водимость практически равна нулю. Ширина ^-«-перехода d определяет ве­
личину сечения токопроводящего канала. Для эффективного управления
сечением канала управляющий ^-«-переход делают резко несимметричным,
чтобы запирающий слой в основном располагался в толще пластины с полу­
проводником и-типа, имеющим относительно малую концентрацию основ­
ных носителей, т.е. п „«р р .
Рис. 1. Структура полевого транзистора и образование проводящего канала
Оценка параметров канала. Выделим рабочий участок канала и
произведем расчет его толщины hKпри условии Uc = 0, £/и < 0 (рис. 1,а).
Воспользовавшись формулой (2) из параграфа 5.2, находим:
(1)
hK = h - d = h - a n(U K+U 3f 5,
где h — толщина полупроводниковой пластинки, легированной донорной
примесью (рис. 1,а); UK— контактное напряжение;
Из (1) следует, что всегда можно подобрать такое отрицательное напря­
жение на затворе t/3 = U0, при котором произойдет полное перекрытие кана­
ла /гк =
/7
- o' = 0 и ток канала 1Кокажется равным нулю (рис. 1,6). Полагая в
(1) hK= 0, находим напряжение отсечки тока стока'.
|t/0|= h2/a„ — UK.
Если |Щ »
(2)
UK~ 0,5 В, то |U0\~ h2/a„, откуда
h = (a„| U01)0'5.
На основании равенств (1) и (2) при |С/0|»
UKполучаем:
hK= h[\ — ( U J U v f \
Так как управление сечением канала (и соответственно током /к) произво­
дится обратно включенным /^«-переходом, сопротивление участка затвор —
исток оказывается очень большим. Оно соответствует сопротивлению полу­
проводникового диода, включенного в обратном направлении.
При прямом включении управляющего /^«-перехода (£/3 > 0) возникает
относительно большой прямой ток затвора и сопротивление участка затвор —
исток резко уменьшается, поэтому такое включение не используется.
Проводимость канала полевого транзистора в зависимости от величи­
ны £/3 < 0 при Uс ~ 0 определяется следующим соотношением:
GK= GK0[1 — (U J U 0f 5],
где Gk0 — проводимость канала при t/3= 0.
Особенности рабочего режима. В рабочем режиме (U c * 0) по ка­
налу протекает ток /к(рис. 2,а). Из-за конечного значения сопротивле­
ния отдельных участков полупроводника и-типа потенциалы различ­
ных поперечных сечений канала будут неодинаковыми. Потенциал Ux,
распределенный вдоль канала, возрастает по определенному закону от
Uc = Ux=о = 0 в сечении истока (х = 0) до Uc в сечении стока. Обратное
(отрицательное) напряжение /?-я-перехода, равное £/р_„ = £/3 — Ux, так­
же возрастает в направлении стока, а это вызывает соответствующее
увеличение толщины запирающего слоя и сужение сечения канала.
Наибольшим сечение канала будет возле истока, где t/p_„ = U 3, и наи­
меньшим — возле стока, где обратное напряжение р-и-перехода равно
Up_n = U3- U c (следует иметь в виду, что t/3< 0).
Если увеличивать напряжение стока Uc, то это вызовет увеличение
тока /к и напряжение £/3- Uc может достичь напряжения отсечки {/о, а это
означает, что в сечении возле стока должно произойти перекрытие канала
(рис. 2,6). На самом деле полного перекрытия канала не происходит, так
как возрастающий ток /к, создающий падение напряжения вдоль канала,
не может запереть сам себя (при /к = 0 ликвидируется причина, вызы­
вающая само перекрытие). Реально в самом узком месте возле стока ос­
тается некоторое малое (отличное от нуля) сечение канала /гк „ас, которое
сохраняется и при дальнейшем увеличении напряжения Uc■ В результате
происходит не отсечка тока, а его ограничение /к= const, т.е. ток канала
становится практически независимым от (Ус. Такой процесс называется
насыщением, а напряжение, при котором он возникает — напряжением
насыщения U q.h, которое определяется из условия U-j - (7С.И= U q.
б)
Рис. 2. Особенности канала в рабочем режиме
Проводимость и ток насыщения канала определяются следующими
соотношениями: GK= Gk0 (1 - Uj/Uo), /к.„ = 0,5 GK(|t/0 - £/3|).
5.6. МОП-транзисторы
Общие сведения. В отличие от полевых транзисторов с управляющим р -п переходом в МОП-транзисторах электрод затвора изолирован от полупро­
водниковой области канала слоем диэлектрика, в качестве которого обычно
используется окисел кремния Si02. Работа МОП-транзисторов основана на
изменении удельного сопротивления полупроводника. Управление сопро­
тивлением канала осуществляется путем изменения разности потенциалов
между объемом полупроводника и затвором. При этом изменяется основной
ток транзистора — ток между истоком и стоком. Существует четыре разно­
видности МОП-транзисторов, которые подразделяют:
=> по проводимости канала — п-канальные и р-канальные\
=> по способу создания канала — с индуцированным каналом и встроен­
ным каналом.
В микросхемах более широко распространены МОП-транзисторы с
индуцированным каналом w-типа. Это связано с тем, что при одинаковой
конструкции и-канальные транзисторы (из-за большей подвижности
электронов по сравнению с дырками) обладают лучшими характеристи­
ками, чем р-канальные транзисторы.
Свойства структуры металл — диэлектрик — полупроводник. Для
более глубокого понимания принципа работы МОП-транзисторов рас­
смотрим явления, возникающие в полупроводнике р -типа структуры ме­
талл — диэлектрик — полупроводник (рис. 1-3) при воздействии на нее
постоянного напряжения отрицательной и положительной полярности.
Выделим т р и с л у ч а я .
1. i/t < 0. При подведении к металлической пластине отрицательного
напряжения (рис. 1 ,а) отрицательные заряды сосредоточиваются на по­
верхности металла, а положительные распределяются в поверхностном
слое /7-полупроводника. Электрическое поле Е, однородное в объеме ди­
электрика, внутри полупроводника убывает до нуля (рис. 1,6). На рис. 1,в
показано распределение потенциала вдоль структуры диэлектрик — по­
лупроводник. Накопление положительного заряда в поверхностном слое
полупроводника происходит за счет притягивания к нему основных но­
сителей — дырок, а также за счет отталкивания неосновных носителей —
электронов. При этом концентрация дырок возрастает по мере прибли­
жения к диэлектрику, а электронов убывает до нуля (рис. 1, г). Если в
поверхностном
слое
создается
избыток
основных
носителей
(в рассматриваемом случае дырок), то говорят об образовании обогащен­
ного слоя, проводимость которого увеличивается.
2. U2 > 0. При подведении к металлической пластине небольшого по­
ложительного напряжения (рис. 2,а) положительные заряды сосредото­
чиваются на поверхности металла, а отрицательные распределяются в
поверхностном слое /?-полупроводника.
Накопление отрицательного заряда в приповерхностном слое проис­
ходит за счет притягивания к нему неосновных носителей заряда (элек­
тронов) и отталкивания основных носителей заряда (дырок). Уменьшение
концентрации основных носителей приводит к снижению проводимости
поверхностного слоя и образованию около поверхности так называемого
обедненного слоя.
3. £/3 > Uг. При увеличении положительного напряжения £/3 (рис. 3,а)
распределенный отрицательный заряд в поверхностном слое полупро­
водника продолжает увеличиваться за счет увеличения концентрации
неосновных носителей (электронов) и уменьшения концентрации основ­
ных носителей (дырок). При определенном значении (Уз концентрация
дырок может стать меньше концентрации неосновных носителей (элек­
тронов). При этом в поверхностном слое полупроводника происходит
смена типа проводимости и образуется инверсный слой (рис. 3,а,г).
Удельная проводимость инверсного слоя в направлении х быстро убыва­
ет до величины, равной собственной проводимости кристалла. За инверс­
ным слоем следует обедненный слой, удельная проводимость которого
постепенно возрастает от собственной проводимости кристалла до про­
водимости полупроводника /7-типа. Таким образом, возникший низкоом­
ный инверсный слой с одной стороны ограничивается диэлектриком, а с
другой — высокоомным слоем собственного полупроводника (слой, в
которомрр ~ п р~ rij). Обедненный слой, изолирующий дырочный инверс­
ный слой от электронного полупроводника (подложки), можно рассмат­
ривать как запирающий слой р-и-перехода, который возникает на грани­
це двух полупроводниковых сред с различным типом проводимости.
Д и э лек т р и к
Инверсны й слой
Полупроводник
4т-
О богащ ен ны й слой
L
К
-d
Рис. 1.
Свойства М О П структуры: образование
обогащ енного слоя
О бед н ен н ы й с л о й
О бед н ен н ы й слой
6—
Рис. 2.
Свойства М О П структуры: образование
обедненного слоя
Рис. 3.
Свойства М О П структуры: образование
инверсного слоя
МОП-транзисторы с индуцированным каналом. С т р у к т у р а
транзистора
(рис. 4,а). Основой для изготовления транзистора
служит кристаллическая пластинка слаболегированного кремния р-типа,
которая называется подложкой. В теле подложки создаются две сильнолеги-
рованные области с «-типом проводимости, расположенные в непосредст­
венной близости друг от друга (от 5 до 50 мкм). Одна из этих областей ис­
пользуется как исток И, другая — как сток С. Между истоком и стоком
поверх тонкого (0,2.. .0,3 мкм) изолирующего слоя из двуокиси кремния рас­
полагается металлический затвор 3. Исток, сток и подложка имеют омиче­
ские контакты с соответствующими полупроводниковыми областями и
снабжаются выводами. Подложку обычно соединяют с истоком.
Принцип
д е й с т в и я . Рассмотрим процессы, происходящие в
транзисторе при различных напряжениях, подаваемых на затвор (t/3) и
сток ( Uc) относительно истока:
=>
< 0. При нулевом напряжении на затворе транзистор представляет
собой два встречно включенных р-и-перехода. Поэтому при любой
полярности напряжения на стоке рабочий ток транзистора (ток между
истоком и стоком) весьма мал, так как равен току обратно смещенно­
го р-и-перехода. При отрицательном напряжении на затворе припо­
верхностный слой /^-полупроводника обогатится дырками и рабочий
ток будет по-прежнему иметь малое значение;
=>
> 0, U( = 0. При подаче на затвор небольшого положительного на­
пряжения основные носители /^-полупроводника дырки начнут ухо­
дить в глубь приповерхностной области, в результате чего создается
так называемый обедненный слой. На рис. 4,а показан пороговый ре­
жим, при котором в обедненном поверхностном слое подложки воз­
никает инверсия проводимости. Это происходит при некотором поро­
говом сопряжении затвора £/зпор, при котором только намечаются
формирование токопроводящего канала и появление тока стока (при
Uc * 0 ) ;
=> U3 > С/з110р, Uc ~ 0. При дальнейшем увеличении положительного напря­
жения на затворе (рис. 4,6) в подложке индуцируется инверсный слой,
обладающий проводимостью «-типа, который соединяет «-области исто­
ка и стока, являясь токопроводящим каналом между ними. При этом
большему положительному напряжению затвора соответствуют большая
удельная проводимость и большая толщина канала, что соответственно
вызывает увеличение проводимости канала в целом. Каналы, отсутст­
вующие в равновесном состоянии и образующиеся под действием внеш­
него напряжения, называют и н д у ц и р о в а н н ы м и
канала­
ми. Так как возникновение и увеличение инверсной проводимости
индуцированного канала «-типа связано с его обогащением носителя­
ми заряда (электронами), то считают, что транзисторы подобного типа
работают по принципу обогащения;
U3 > t/зпор, и с > 0. Эти напряжения соответствуют рабочему режиму,
когда по каналу течет ток /к, обусловленный дрейфом электронов от
истока к стоку. Напряжение затвора относительно различных попе­
речных сечений канала оказывается неодинаковым, а изменяется от
С/з возле истока до £/3 — Uc возле стока. В связи с этим ширина инду­
цированного канала больше возле истока и меньше возле стока. Об­
щая проводимость канала соответственно уменьшается.
Ui
t^nop> о
ис=о
Рис. 4. МОП-транзистор с индуцированным каналом
При Uc = V] — f/jnop напряжение на затворе относительно стокового
участка канала становится равным пороговому значению ({/3 - Uc =
~ ^3nop)i что приводит к исчезновению инверсной проводимости и услов­
ному перекрытию индуцированного канала около стока (рис. 4,в). Тран­
зистор входит в режим насыщения. Напряжение стока, при котором воз­
никает обедненная область канала возле стока, называется напряжением
насыщения {UCm, = U3- 1/Ъор);
=> Uг > U3n0р, Ис > Uc нас- Дальнейшее увеличение напряжения стока Uc
приводит к увеличению обедненной области канала А/к, на которой
выделяется все излишнее (добавочное) напряжение Uc - UChас- В ре6-1881
жиме насыщения происходит незначительное увеличение тока канала
(рис. А,г).
При дальнейшем увеличении напряжения Uc возникает (лавинный)
электрический пробой
и-перехода сток— подложка и ток стока резко
возрастает.
М О П -тран зи стор ы со встроенным каналом. У транзисторов этого
типа канал, соединяющий исток со стоком:
=> возникает естественно из-за контактных явлений на границе полу­
проводника р-типа с диэлектриком (рис. 5). Если в качестве подложки
использовать кремний с дырочной проводимостью, то сильно легиро­
ванные «-области истока и стока будут соединены между собой есте­
ственным каналом в виде тонкого инверсного слоя с электронным ти­
пом проводимости, который возникает в месте контакта кремния
p -типа с пленкой БЮг;
=> изготавливают технологическим путем, в виде тонкого слаболегиро­
ванного полупроводникового слоя, объединяющего исток со стоком,
может быть сделан как п-, так и р-типа (рис. 6).
Рассмотрим процессы, происходящие в канале и-типа.
Естественный
к а н а л . Допустим, что канал имеет началь­
ную исходную проводимость Gko (рис. 5,а). В таком канале путь для тока
стока открыт при нулевом напряжении затвора (С/з = 0).
При отрицательном напряжении на затворе (С/з < 0) дырки будут
притягиваться из подложки, электроны отталкиваться из инверсного
слоя, что вызовет обеднение канала основными носителями и уменьше­
ние его общей проводимости. При некотором пороговом напряжении
U3 = U0< 0 естественный канал исчезает (рис. 5,6).
При положительном напряжении затвора (U 3 > 0) канал будет обога­
щаться основными носителями заряда (электронами) и его ширина, а
следовательно, и общая проводимость будет увеличиваться (рис. 5,в).
Увеличение положительного напряжения стока (U c> 0) вызывает увели­
чение тока стока. При этом напряжение стока распределяется вдоль кана­
ла неравномерно (рис. 5,г). При определенном значении напряжения сто­
ка t/снас происходит полное обеднение и условное перекрытие стокового
участка канала (рис. 5,г) и наступает режим насыщения.
Т е х н о л о г и ч е с к и й
к а н а л . У транзисторов этого
типа встроенный канал отделяется от подложки не индуцированным, а реаль­
ным /т-и-переходом (рис. 6,а). Транзисторы имеют большие значения началь­
ной проводимости канала GKo и отрицательного напряжения отсечки Uq.
Е стественны й канал
Т ехнологический канал
Ь'з=0
Рис. 5. МОП-транзистор
с естественным каналом
и с =0
Рис. 6. МОП-транзистор
с технологическим каналом
При отрицательном напряжении на затворе (U j < 0) в канале индуци­
руется обедненный поверхностный слой, который при определенном зна­
чении Us=Uo смыкается с расширяющимся р-и-переходом канал — под­
ложка и токопроводящий канал исчезает (рис. 6,6).
При положительном напряжении на затворе (С/з > 0) в канале индуциру­
ется обогащенный поверхностный слой. Обогащение канала приводит к его
расширению за счет обедненного слоя р-и-перехода канал — подложка
(рис. 6,в). В результате общая проводимость канала увеличивается.
Если в исходном состоянии канал открыт, то увеличение поло­
жительного напряжения стока Uc> 0 вызывает увеличение тока стока и
неравномерность распределения Uc вдоль канала. При определенном зна­
чении напряжения Uc „ас происходит смыкание индуцированного обед­
ненного слоя с расширяющимся р-и-переходом на стоковом участке ка­
нала (рис. 6,е), что приводит канал к режиму насыщения.
5.7. Тиристоры
Общие сведения. Необходимость в мощных приборах со свойствами, близ­
кими к свойствам идеального управляемого ключа (бесконечно большое со­
противление в запертом состоянии и нулевое сопротивление в проводящем
состоянии с высоким быстродействием), исключительно велика. Применяв­
шиеся ранее в качестве электронных коммутаторов газонаполненные тиратро­
ны не удовлетворяли требованиям по скорости переключений (время включе­
ния — десятки микросекунд, время выключения — сотни микросекунд) и по­
терям мощности внутри приборов (остаточные напряжения на них составляли
десятки вольт). Широкому использованию транзисторов в ключевом режиме
препятствуют малые рабочие напряжения (не превышающие обычно 100 В).
В начале 50-х годов прошлого столетия после появления биполярного
транзистора исследовалась четырехслойная структура типа р — п—р— п.
Было замечено, что характеристики такой структуры во многом напоми­
нали характеристики тиратронов. Приборы такого типа получили назва­
ние тиристоров (ТИРатрон и транзИСТОР).
Т и р и с т о р — полупроводниковый прибор, который:
=> состоит из трех или более последовательно включенных р— «-переходов;
=> имеет два устойчивых состояния (открытое и закрытое) и может пере­
ключаться из одного состояния в другое.
По принципу своего использования в схемах тиристоры имеют много
общего с тиратронами, однако их время переключения составляет деся­
тые и даже сотые доли микросекунды при токах в сотни миллиампер (по­
рядка 100— 200 мА) и менее одной микросекунды при токах в десятки
ампер (10-15 А), а остаточное напряжение на электродах в проводящем
состоянии не превышает обычно 1-2 В.
Наибольшее распространение получила структура тиристора с че­
тырьмя чередующимися слоями полупроводников р - и «-типов. Различа­
ют два вида тиристоров:
=> неуправляемый тиристор, который называют диодным тиристором,
диод-тиристором или динистором;
=> управляемый тиристор, который называют триодным тиристором,
триод-тиристором или тринистором.
Рассмотрим основные ф и з и ч е с к и е
п р о ц е с с ы , протекаю­
щие в структуре т и п а — п\—р 2— п2, вкоторой имеются выводы от двух
крайних р х- и « 2-областей и от средней «,-областн (рис. \,а). Предста­
вим четырехслойную структуру в виде двух транзисторов, разделив иг
и /?2-слои на две отдельные области и соединив их гальванической свя­
зью (рис. 1,6). Отметим, что коллектором второго транзистора является
область п"\, к которой подводится положительное напряжение, а эмитте­
ром
область « 2, к которой подводится отрицательное напряжение. По­
лученная структура представляет собой составной транзистор, в котором
Р ~ п—/^-транзистор включен по схеме с общей базой, а и—р — «-транзистор
— по схеме с общим коллектором.
э
ч
п
Р\
К
"2
3 [
Р 2
Б
и",
К
/;= /" 6
Р\
1
Р2
_Т+‘
о ------------------------
~ -+ Е
- U
б)
Рис. 1. Четырехслойная структура с выводами от двух крайнихр\- и и2-областей
и от средней « i -области ( а) и ее представление в виде двух транзисторов (б )
Усиление по току составного транзистора определяется соотношением
Ы\
сс'
а = — 2- = -------- .
Д/"э 1 - а "
Несмотря на то что коэффициент усиления по току каждого из тран­
зисторов (а ' и а ") меньше единицы, коэффициент передачи тока четы­
рехслойной р— п—р—«-структуры в целом может значительно превы­
шать единицу. Это обстоятельство свидетельствует о возможности ис­
пользования четырехслойной структуры в ключевом режиме.
Рассмотрим особенности диодных и триодных тиристоров.
Динисторы. Диодный тиристор представляет собой двухполюсную
четырехслойную р— п—р—и-структуру (рис. 2,а), в которой анод А и ка­
тод К обеспечивают электрическую связь с внешней р - и «-областью со­
ответственно. Его обозначение приведено на рис. 2,6.
М е х а н и з м п е р е к л ю ч е н и я динистора из одного устойчи­
вого состояния в другое связан с развитием лавинного процесса. Он дос­
таточно сложен и объясняется с помощью энергетических диаграмм. По­
этому, воспользовавшись приведенным выше представлением четырех­
слойной структуры в виде двух транзисторов, дадим упрощенную трак­
товку процессов переключения в схеме.
Через эмиттерный переход первого р\— п\—р 2-трттстора (рис. 2,а)
дырки инжектируют из области р\ в область п\, выполняющую роль базы
для этого транзистора. Пройдя базу и коллекторный переход, инжектиро­
ванные дырки появляются в коллекторе pi первого транзистора, создавая
дырочный ток /р = /рко + схi/, где 1Р ко — обратный дырочный ток коллек­
торного перехода; cti — коэффициент передачи тока I эмиттера первого
транзистора.
Рис. 2. Динистор как четырехслойиая структура (а)
и его графическое обозначение (б); схема включения динистора (в) и его
вольтамперная характеристика (г)
Коллектор р 2 первого транзистора одновременно служит базой второго
транзистора. Появление дырок в базе р 2 второго п2—рг— иi-транзистора при­
водит к образованию нескомпенсированного объемного заряда. В результате
понижается высота потенциального барьера р2— иг-перехода (база— эмиттер)
второго транзистора, что вызывает встречную инжекцию электронов из эмит­
терной области п2 второго транзистора в область р2. Эта область является ба­
зой для второго транзистора и коллектором для первого. Инжектированные
электроны проходят через коллекторный р2— «(-переход и попадают в коллек­
тор «1 второго транзистора, служащий одновременно базой первого р\— щ—р 2транзистора. Значение электронного тока равно 1„ = /„ко + а21, где /иК0 — об­
ратный электронный ток коллекторного перехода; а 2— коэффициент переда­
чи тока эмиттера-второго транзистора.
Поскольку дырки и электроны движутся навстречу друг другу, ре­
зультирующий ток динистора
(1)
I = 1р+ 1п~ Лево + Ctj/,
где /КВо — суммарный обратный ток тиристора, а 2 = ai + а 2 — суммар­
ный коэффициент передачи тока эмиттера.
Решая (1) относительно /, получим
(2)
/ = /кво / (1 — O-z)Как видно из (2), при a 2 —> 1, /„ —» °°. Поэтому соотношение а £ = 1 яв­
ляется условием переключения динистора. При ax = 1 инжекция электронов
в область щ приводит к появлению нескомпенсированного объемного заря­
да, который, понижая высоту потенциального барьера р х— «[-перехода, вы­
зывает встречную вторичную инжекцию дырок из области р\ в область щ.
Затем процесс повторяется, и ток лавинообразно возрастает.
Описанные процессы определяют форму вольт-амперной характери­
стики (В А Х ) динистора в первом квадранте (рис. 2,г). На ВАХ можно
выделить:
=> область с малыми значениями тока / при больших значениях напря­
жения U (нижняя ветвь В АХ), которая соответствует закрытому со­
стоянию динистора;
=> область с большими токами / при малых значениях напряжения U
(верхняя ветвь В АХ), которая соответствует открытому состоянию
динистора;
область отрицательного дифференциального сопротивления, которая
расположена между двумя первыми областями.
Точки 1 и 3 соответствуют условию a j = 1 и называются соответст­
венно точками включения и выключения (удержания) динистора.
При изменении полярности напряжения, приложенного к динистору,
на обратную (рис. 2,а) переходы р х— п\ и р 2— п2 смещены в обратном на­
правлении. Поэтому в третьем квадранте В А Х динистора имеет вид об­
ратной ветви характеристики полупроводникового диода с двумя облас­
тями ВАХ: областью высокого сопротивления и областью пробоя
(рис. 2,г).
Рассмотрим п р о ц е с с ы
переключения
динистора
в схеме на рис. 2,в при изменении подводимого напряжения Е, для чего
воспользуемся его вольт-амперной характеристикой / = F (U ), на которую
нанесем нагрузочную прямую U = Е - R I (рис. 2,г).
При плавном увеличении напряжения источника £ от 0 до напряжения
отпирания Е0 ток в цепи мал. Эта область вольт-амперной характеристи­
ки (В А Х ) соответствует закрытому состоянию диодного тиристора.
В точке 1 В АХ напряжение на динисторе достигает напряжения включе­
ния и вкл. Динистор переходит в открытое (точка 2 на В АХ), которому
соответствует большой ток (7ВКЛ) и малое остаточное напряжение ( и жт).
При Е > Е0 ток и напряжение на динисторе соответствуют верхней ветви
ВАХ. При уменьшении напряжения источника до Е = Е3 ток и напряже­
ние на динисторе также соответствуют прямой ветви ВАХ. В точке 3
В АХ динистор переходит в закрытое состояние (т. 4, U = £/выкл). При Е < Е Ъ
ток и напряжение на динисторе соответствуют нижней ветви ВАХ.
Тринисторы. В триодном тиристоре для изменения его состояния по­
мимо анода и катода имеет дополнительный управляющий электрод УЭ,
который подключается либо к ближайшей к катоду /?2-области, либо к
ближайшей к аноду иi-области (рис. 3,а, в). В соответствии с этим разли­
чают катодное (более распространено) и анодное управление тиристором.
Управляющий электрод дает возможность управлять током близлежащего
эмиттера («2 или р\). Для этого на него подается напряжение такой поляр­
ности, которая обеспечит отпирание соответствующего эмиттерного пере­
хода. Таким образом, в тринисторе процессы отпирания и запирания осу­
ществляются не за счет изменения приложенного между анодом и катодом
напряжения внешнего источника (как у динистора), а за счет изменения
напряжения на УЭ или протекающего через него тока /у.
На рис. 3, б, г приведены условные обозначения тринисторов с катод­
ным и анодным управлением, а на рис. Ъ,д — В АХ тринистора. Как вид­
но из рис. 3,д с возрастанием управляющего тока /у уменьшается напря­
жение включения тринистора и вкл, и при достаточно большом значении /у
вид прямой ветви В А Х тринистора аналогичен прямой ветви В АХ диода.
При /у = 0 триодный тиристор «вырождается» в диодный.
Таким образом, управляющий электрод играет роль «поджигающего»
электрода. Подачей на него импульса тринистор переводится в открытое
состояние, при этом УЭ теряет управляющие свойства. Для выключения
тринистора необходимо снизить ток до величины, меньшей /выкл (рис. 3,(3).
Отметим, что выпускаются запираемые триодные тиристоры, которые вы­
ключаются с помощью коротких по длительности импульсов напряжения
обратной полярности.
Л
А
I
о—*+
Р2
Рис. 3. Тиристоры с катодным и анодным управлением (а, б, в, г)
и принцип управления (д)
Основная область применения тиристоров — преобразовательная
техника. Номинальные значения токов некоторых типов тиристоров в
открытом состоянии достигают 5000 А , а номинальные значения напря­
жений в закрытом состоянии — до 5000 В [18].
6. НЕЛИНЕЙНЫЕ РЕАКТИВНЫЕ ЭЛЕМЕНТЫ
6.1. Общие сведения
В теории цепей нелинейные реактивные элементы (НРЭ) вводятся путем
обобщения линейных аналогов на нелинейный случай. Важную роль в
теоретическом и практическом отношении играют нелинейные реактив­
ные двухполюсники (НРД), которые:
=> образуют самостоятельный класс НРЭ в виде готовых изделий (варакторы, дроссели, сегнетоэлектрические конденсаторы и др.);
=> служат для моделирования реальных элементов. Например, гипотети­
ческие магнитные двухполюсники, описываемые нелинейной зависи­
мостью индукции от напряженности магнитного поля, используются
для моделирования различных ферромагнитных элементов;
=> используются для построения многополюсных НРЭ.
Идеальным
Н Р Д будем называть реактивный двухполюсник
с характеристикой в виде однозначной нелинейной функции у(х) или
у = fix ), где х — воздействие, у — отклик, при этом
=> нелинейный емкостный двухполюсник описывается вольт-кулонной
q(u) или кулон-вольтной u(q) характеристикой;
=> нелинейный индуктивный двухполюсник описывается ампервеберной \|/(г) или вебер-амперной г'(\|/) характеристикой.
Фундаментальные свойства идеальных НРД. Реактивные двухпо­
люсники с однозначными характеристиками у(х) при периодическом воз­
действии x(t) в виде непрерывной функции обладают двумя важными для
преобразования колебаний и сигналов свойствами:
=> не потребляют активной мощности;
=> постоянные составляющие напряжения для емкостного двухполюсни­
ка и тока — для индуктивного равны нулю.
Справедливость указанных свойств для нелинейных емкостных двух­
полюсников следует из выражений
1 Т
1 ,<Г)
h O W /I Т
(1)
P = — \u {t)i(t)d t=— ju (q )d q = ----^
* О
* ^(0)
*
(2)
/0 = i f / ( / ) ^ = g ( r ) ~ g (Q )= 0 ,
'о
*
1 и(Г)
— jq(u)d u = 0,
O ' * ц{0)
где Т — период воздействия и отклика; в силу периодичности z(0) = z{T).
В (1) использовалась формула интегрирования по частям. Для нели­
нейных индуктивных двухполюсников на основании принципа дуально­
сти можно получить соотношения, аналогичные (1), (2).
Основные типы НРЭ. Следует выделить три типа элементов со
свойствами, близкими к свойствам идеальных НРЭ: ферромагнитные,
сегнетоэлектрические и полупроводниковые НРЭ.
В ферромагнитных
Н Р Э используются магнитомягкие
материалы (электротехнические стали, пермаллои, магнитомягкие фер­
риты и др.), обладающие способностью намагничиваться до насыщения в
слабых полях и имеющие малые потери на перемагничивание. Конструк­
тивно ферромагнитные элементы выполняются в виде дросселей или
трансформаторов на магнитопроводах стандартных типов или специаль­
ной конструкции. При использовании электротехнических сталей воз­
можны конструкция магнитопровода по типу асинхронной машины с
фазным ротором, в которой реализуется режим работы ферромагнетика с
вращающимся магнитным полем, или конструкция из двух развернутых
на 90° и состыкованных вместе U-образных магнитопроводов (рис. 1,а),
обеспечивающая ортогональное взаимодействие магнитных полей. Ши­
рокими возможностями обладают ферриты, позволяющие изготавливать
магнитопроводы различной конфигурации. В качестве примера на
рис. 1,б приведена конструкция ферромагнитного элемента с ортогональ­
ными полями, выполненного на биторе.
Основой для построения с е г н е т о э л е к т р и ч е с к и х
НРЭ
(сегнетоконденсаторов или варикондов) служат сегнетоэлектрики: сегнетокерамика, титанаты бария и висмута, ниобат калия и др. Несмотря на
неоднократные попытки создания сегнетоконденсаторов, до настоящего
времени не удалось разработать элементы с удовлетворительными харак­
теристиками. К их недостаткам следует отнести значительные потери
мощности, большую жесткость характеристик поляризации и сравни­
тельно высокие коэрцитивные поля, наличие униполярности в ходе кри­
вых поляризации, сильную зависимость характеристик от температуры.
Феррит
Внутренняя
обмотка
Обмотки
Рис. 1. Ферромагнитные элементы с использованием
двух U -образных магнитопроводов (а ) и магнитопровода типа битор (6 )
Среди п о л у п р о в о д н и к о в ы х
НРЭ
наибольшее распро­
странение получила нелинейная емкость полупроводникового/?— «-перехода
(см. п. 5.3). Обычно при объяснении ее физической природы исходят из ре­
жима работы р— «-перехода: в запертом режиме превалирует барьерная ем­
кость, в открытом — диффузионная. Механизмы образования емкостных
свойств в этих режимах хорошо изучены и обстоятельно описаны в литера­
туре. Для режима частичного отпирания р— и-перехода существуют разные
трактовки его емкостных свойств. Указанные обстоятельства привели к раз­
личным названиям полупроводниковых НРЭ (варикапы, варакторы, диоды с
накоплением заряда, диоды с эффектом смыкания, диоды с резким восста­
новлением и др.) и подходам к моделированию.
Следует отметить, что еще в тридцатые годы для осуществления час­
тотной модуляции применялись реактивные каскады (лампы), представ­
ляющие собой на переменном токе электронные аналоги управляемых
реактивных элементов, построенным (синтезированным) на основе уси­
лительных электронных приборов с нелинейными вольт-амперными ха­
рактеристиками и линейных фазосдвигающих цепей. Большие потери
мощности реактивных каскадов на постоянном токе ограничивают об­
ласть их применения устройствами информационного типа.
О функциональных возможностях применения НРЭ. Фундамен­
тальное свойство идеальных НРЭ преобразовывать энергию без потерь
явилось следствием широких функциональных возможностей примене­
ния НРЭ, к которым следует отнести:
=> преобразование параметров и формирование колебаний с малыми потерями
мощности. Потенциальный КПД таких преобразователей составляет 100%;
=> усиление и преобразование колебаний и сигналов с малым уровнем
вносимых шумов. Эта возможность вытекает из термодинамических
представлений о природе шумов;
=> генерирование субгармонических колебаний и гармонических коле­
баний основной частоты в балансных схемах;
управление реактивной мощностью гармонических колебаний. Из­
вестны два способа управления: изменением смещения на НРЭ и
изменением уровня воздействующего колебания. Первый способ
используется для осуществления амплитудной, частотной и фазо­
вой модуляций, для перестройки колебательных систем, для созда­
ния источников реактивной мощности и других целей, а второй —
для параметрической стабилизации или ограничения уровня на­
пряжения (тока).
Богатые функциональные возможности НРЭ позволили на их основе
создать широкое многообразие устройств, отличающихся назначением,
видом функционального преобразования, диапазоном рабочих частот,
уровнем преобразуемых мощностей и рядом других параметров.
Другое фундаментальное свойство идеальных НРЭ, проявляющееся в
отсутствии постоянного тока или постоянного напряжения на полюсах
элемента, свидетельствует о том, что НРЭ не потребляет энергии от ис­
точников постоянного тока (напряжения). Поэтому последние вводят в
устройство лишь при необходимости смещения рабочей точки НРЭ с
целью получения требуемого режима его работы.
Следовательно, НРЭ могут быть использованы либо для непосредст­
венного преобразования входных колебаний, либо для пополнения их
мощности от отдельного источника (генератора накачки) переменного
напряжения. Указанные обстоятельства придают специфику схемным
решениям устройств на НРЭ.
Основные области применения НРЭ. Одна из наиболее широких
областей применения НРЭ связана с созданием источников колебаний
синусоидальной формы. При построении таких источников по ряду при­
чин возникает необходимость преобразования параметров гармонических
колебаний или управления ими. Исходя из функционального признака,
можно выделить четыре группы устройств, относящихся к этому клас­
су. Рассмотрим пути и современный уровень их развития.
Одну из групп устройств преобразования параметров гармонических ко­
лебаний (П ГК ) образуют к р а т н ы е
преобразователи
ч а с т о т ы . В ее состав входят умножители (У Ч ) и делители (ДЧ) частоты.
Магнитный удвоитель частоты, запатентованный Эпштейном в 1902 г.,
относится к числу первых устройств на НРЭ. В нашей стране работы по
исследованию и применению УЧ начаты В. П. Вологдиным в 1911 г. и
продолжаются до настоящего времени. Наибольшее распространение
получили умножители на ферромагнетиках с параллельными полями в
качестве источников энергии повышенной частоты промышленной сети
50 Гц. Позднее появились ферромагнитные УЧ с вращающимися магнит­
ными полями и с ортогональным управлением и благодаря своим осо­
бенностям нашли широкое применение.
Параллельно проводились и ведутся работы по исследованию и при­
менению УЧ на нелинейных емкостях. Разработка и промышленный вы­
пуск полупроводниковых НРЭ, близких по свойствам к идеальным реак­
тивным элементам, послужили сильным толчком к развитию техники
умножения частоты радиодиапазона. Благодаря усилиям исследователей
и разработчиков за сравнительно короткий срок варакторные УЧ прошли
стадию всесторонних исследований и нашли широкое применение в ра­
диоэлектронной аппаратуре.
В пятидесятые и шестидесятые годы прошлого столетия проявился значи­
тельный интерес к ДЧ. На их основе могут быть построены генераторы гармо­
нических колебаний пониженной частоты, параметроны со многими состоя­
ниями равновесия, квантователи фазы, параметрические ограничители ампли­
туды, преобразователи числа фаз и другие устройства. Это послужило стиму­
лом к проведению широких исследований по выявлению свойств и возможно­
стей применения параметрических делителей частоты.
Частотные, фазовые и амплитудные модуляторы относятся к у с т ­
ройствам
с управляемыми
параметрами
гар­
монических
колебаний.
Наибольшее распространение
в настоящее время получили частотные и фазовые модуляторы на варикапах,
использующих барьерную емкость обратно смещенного р— «-перехода. Ам­
плитудные модуляторы на НРЭ, несмотря на их достоинства, находят огра­
ниченное применение из-за отсутствия реактивных элементов, способных на
высоких частотах преобразовывать высокие уровни мощностей. К этой же
группе устройств следует отнести резонансные магнитные и диэлектриче­
ские усилители, являющиеся низкочастотными аналогами реактивных моду­
ляторов, а также низкочастотные малошумящие параметрические усилители.
В качестве устройств с управляемой амплитудой и фазой гармонических
колебаний можно также использовать умножители частоты.
Отдельную группу составляют п а р а м е т р и ч е с к и е
билизаторы
и
ста­
г е н е р а т о р ы , принцип действия которых ос­
нован на нелинейной расстройке колебательной системы, вносимой НРЭ
при изменении амплитуды входного воздействия. Среди параметриче­
ских стабилизаторов наибольшее применение нашли феррорезонансные
стабилизаторы напряжения. Несмотря на то, что этот тип стабилизаторов
известен давно и достаточно полно исследован, интерес к нему сохранил­
ся до настоящего времени. К параметрическим генераторам основной
частоты относятся параметрические трансформаторы на магнитопроводах с ортогональными полями, обладающие по сравнению с феррорезонансными трансформаторами лучшими стабилизирующими, фильтрую­
щими, защитными свойствами и другими достоинствами.
Появление полупроводниковых НРЭ привело в конце пятидесятых
годов прошлого века к быстрому развитию и внедрению м а л о ш у мящих
параметрических
усилителей
С ВЧ д и а п а з о н а . В многочисленных работах всесторонне и полно рас­
смотрен широкий круг вопросов, относящихся к схемным решениям,
протекающим процессам, свойствам, характеристикам и предельным
возможностям, методам анализа и расчета параметрических усилителей.
Другая, достаточно широкая область применения НРЭ связана с
формированием
и
преобразованием
колеба­
ний
импульсной
ф о р м ы . К устройствам, предназначенным
для преобразования гармонических колебаний в колебания импульсной
формы, следует отнести магнитные и диэлектрические усилители с апе­
риодической нагрузкой. Широкое распространение также получили раз­
личные ферромагнитные формирователи импульсов. Весьма интересные
технические решения различных импульсных устройств могут быть по­
лучены на основе диодов с накоплением зарядов.
Не все из рассмотренных устройств заняли в настоящее время то место, ко­
торое первоначально им отводилось. Не оправдались надежды, возлагаемые на
параметроны и параметрические генераторы кратных частот. Благодаря успе­
хам, достигнутым в технологии изготовления транзисторов СВЧ-диапазона,
параметрические усилители постепенно вытесняются транзисторными. Тири­
сторные преобразователи вытеснили магнитные усилители. Несмотря на это,
многие из устройств на НРЭ находят весьма широкое применение и в настоя­
щее время. К ним относятся ферромагнитные и варакторные умножители час­
тоты, частотные и фазовые модуляторы на варикапах, феррорезонансные ста­
билизаторы напряжения и др. Ряд устройств на ферромагнитных НРЭ с орто­
гональным управлением, к которым следует отнести параметрические транс­
форматоры, умножители и делители частоты, интенсивно исследуются и уже
используются в электротехнической и радиоэлектронной аппаратуре.
О
необходимости совершенствования Н Р Э . Одной из основных
причин, сдерживающих более широкое применение устройств на НРЭ,
является несовершенство элементной базы. Анализ ее состояния показы­
вает, что:
=> несмотря на большие усилия, затраченные на исследования сегнето­
конденсаторов, до настоящего времени не созданы вариконды, удов­
летворяющие предъявляемым требованиям;
=> разработаны и применяются умножительные полупроводниковые диоды
с достаточно высокими уровнями преобразуемых мощностей и малыми
потерями, однако их ассортимент, выпускаемый промышленностью, не­
велик и имеет ограниченный диапазон мощностей и частот. Используе­
мые обратно смещенные р— «-переходы для управления частотой и фа­
зой гармонических колебаний не позволяют получить высокие уровни
мощности на выходе модуляторов;
=> область наиболее широкого применения ферромагнитных НРЭ огра­
ничена промышленными и низкими частотами. Комплексных иссле­
дований, направленных на разработку ферромагнитных материалов
для создания НРЭ в диапазоне радиочастот, не проводилось, хотя не­
которые частные результаты свидетельствуют о возможности приме­
нения ферритов в СВЧ-диапазоне с высокой энергетической эффек­
тивностью;
=> известные электронные аналоги НРЭ (реактивные каскады) из-за при­
сущих им низких энергетических показателей непригодны для приме­
нения в мощных устройствах.
Таким образом, элементная база нуждается в дальнейшем совершен­
ствовании и развитии. Один из возможных и перспективных путей в этом
направлении состоит в синтезировании НРЭ на основе управляемых
ключей и линейных реактивных элементов. О целесообразности такого
подхода свидетельствуют следующие факторы:
=> в идеальном случае как ключевые (переключающие), так и реактив­
ные элементы не потребляют энергии;
=> выпускаемые промышленностью или изготавливаемые в условиях
производства электронные и полупроводниковые приборы в пере­
ключающем режиме, конденсаторы, катушки индуктивности, дроссе­
ли обладают малыми потерями мощности, способны работать при
больших токах и напряжениях, в широком диапазоне частот, имеют
стабильные характеристики и параметры;
=> благодаря достижениям микроэлектроники появилась возможность
создания высокоэкономичных малогабаритных схем управления.
6.2. Соотношения Мэнли — Роу
Если на реактивный двухполюсник с нелинейный вольткулонной (или
ампер-веберной) характеристикой в виде однозначной функции воздей­
ствуют гармонические колебания с частотами а); и аь, то в спектре от­
клика содержатся комбинационные составляющие со„„ = тщ + исо2, где
т, п — целые положительные и отрицательные числа, включая нуль. Для
такого двухполюсника справедливы следующие энергетические соотно­
шения, полученные Мэнли и Роу:
00
(1)
I
00
I
т -0 п = -°о
тР
со „ р
во
—
= 0;
„
X
I —
= 0,
т=~™ п=0
где Рт „ — активная мощность на комбинационной частоте ютп.
Вывод соотношений имеется в книге [5]. Он базируется на использо­
вании двумерных рядов Фурье. Отметим, что симметричная форма запи­
си выражений (1) не является обязательной, т.е. можно использовать од­
ни и те же пределы суммирования в обоих соотношениях. Поэтому, ум­
ножая первое выражение (1) на а>ь а второе — на со2 и складывая эти вы­
ражения, получим соотношение
(2 )
т=0п=-°°
= 0,
свидетельствующее о том, что идеальный реактивный двухполюсник не
потребляет мощности.
Таким образом, соотношения Мэнли — Роу (1) дополнительно к (2)
описывают частотно зависимую связь между активными мощностями в
идеальном реактивном двухполюснике. Какие-либо конкретные выводы
на их основании можно сделать только при простом спектре колебаний.
Рассмотрим два известных случая использования соотношений (1) в тех­
нике параметрического усиления, которыми, по сути дела, и ограничено
непосредственное их использование.
Приняв в первом соотношении (1) т = 1, л = 0 и m = 1, и = 1, а во вто­
ром — т = 0 , и = 1 и т = 1 , л = 1 , получим:
(3)
Р'-° _
со,
со, +со2 ’
P°.i
со2
_
со, +со2
Соотношения (3) описывают известную схему нерегенеративного па­
раметрического усилителя с повышением частоты (рис. 1,а). Положи­
тельный знак активных мощностей Р 1Л и P0.i в (3) можно трактовать как
отбор мощности на частотах со, и со2 от источников ЭДС в\ и ег. Отрица­
тельный знак мощности Р\ \свидетельствует о том, что нелинейная реактив­
ность является источником колебаний с суммарной частотой СО] + о>2. Мощ­
ность |P|j| выделяется на сопротивлении нагрузки RH. Обычно Ю г » tOj. Из
первого соотношения (3) можно определить коэффициент усиления
мощности К Р = |Ри |/Л.о = (<*>) + co2)/coi » 1 . Второе соотношение (3) сви­
детельствует о том, что |Ри| = Р| 0, т.е. основной вклад в преобразуемую
мощность обеспечивает источник ЭДС е2, который называют генерато­
ром накачки. Таким образом, при параметрическом усилении сигнал, по­
ступающий от источника е\ с частотой соь черпает энергию от генератора
накачки е2с более высокой частотой ш2.
Изменив в (3) знаки на обратные, приходим к выражениям
(4)
_ ^>1-° ^ 1.1
.
со,
о , +со2 ’
_ ^о-1 _
ю2
tOj +со2
которые относятся к схеме с одним источником ЭДС ei2 (рис. 1,6) и сви­
детельствует о возможности генерирования субгармонических колеба­
ний. Для генерирования колебаний должны выполняться условия само­
возбуждения. Из (4) следует, что в возбужденном режиме мощность от­
бирается от источника е12на частоте o>i + ю2 и передается в контуры, на­
строенные на частоты Ш| и Юг. При этом между активными мощностями
выполняется следующее соотношение: |Pi,0|/ Л и = со2/(Оь Если в контур
генератора (рис. 1,6), настроенный частоту СО], включить источник в\, то
получим схему регенеративного параметрического усилителя (рис. 1,в),
который работает в недовозбужденном режиме. При этом усиление сиг­
нала происходит на частоте сигнала Ш] без преобразования.
Рис. 1. Схемы нерегенеративного параметрического усилителя
с повышением частоты (в ), трехчастотного параметрического генератора (б )
и регенеративного параметрического усилителя основной частоты (в)
6.3. Принцип обратимости кратного преобразования
частоты на НРД
Постановка вопроса. Известный принцип взаимности играет важную
роль в теории линейных цепей и антенн. Сформулируем подобный
принцип, который назовем принципом обратимости, для кратного
преобразования частоты (КП Ч) на НРД. Допустим, что в КПЧ с помо­
щью НРД входные колебания с частотой /исо преобразуются в выход­
ные колебания с частотой исо. Задача состоит в выявлении условий,
при которых в КПЧ возможна передача энергии в обратном направле­
нии, т.е. преобразование колебаний с частотой исо в колебания с час­
тотой /исо.
Доказательство и формулировка принципа обратимости. Рассмот­
рим стационарный режим работы КПЧ, в котором на НРД с однозначной
кулон-вольтной характеристикой (К В Х ) u{q) воздействует заряд
(1)
q(t) = Q0 + ^ 0 гсо5(п: + фг),
т = сог,
Г
где Q0 — постоянная составляющая заряда; Qr, фг — амплитуда и началь­
ная фаза составляющей заряда с частотой гсо; при этом /исо, исо — часто­
ты преобразования, одна из которых входная, другая — выходная; /со —
холостые частоты; т, п, 1е г; г — целые числа.
В этом случае выражения активной и реактивной составляющих мощ­
ности НРД на частоте £со (к е г) и постоянной составляющей напряжения
на НРД можно записать в виде
(2)
in
. *a>Qk 2п
a,Ato I
2п
1
(3)
ио = —
2л
j «
во + Е £ ? г С о з ( п : + ф г )
Г-5ш(£т + ф*)1
[ С05(/ГГ + Ф * ) j
Г
Qc+^Q' Cosin + qir) dx.
Использовав (1), (2), получим в силу однозначности КВХ u{q) и пе­
риодичности q(x) (1) сумму активных мощностей:
( 4)
j «(2я)
H Pa,m = J ~ fu(q)dq = 0.
<7(0)
Допустим, что на холостых частотах /со активная мощность НРД рав­
на нулю. Тогда из (4) следует
(5)
Л,И0) + Лцто = 0.
Для принятых условий стационарный режим работы КПЧ можно опи­
сать системой уравнений, составленных на основании баланса активных
и реактивных мощностей на частотах ки>:
(6)
Р a,m(U Рц.т = 0> Р а.иш Ръ,п = 0, Р а,/ш—0, Рр.кт+ Рр,к ~ 0,
где ке г; Рак, Р р,к — активные и реактивные составляющие мощности на
частоте кш внешних по отношению к НРД цепей КПЧ.
Для случая, когда осуществляется преобразование активной мощности с
частоты т(й на частоту woo, начальные фазы воздействия (1), удовлетворяю­
щие уравнениям (6), будем обозначать (р°, а их совокупность по всем индек­
сам г — { } •
(7 )
При этом должны выполняться соотношения
/>а,и и ( { Ф ° } ) > 0,
Р*,ш({ ф “
} ) < 0,
Р ш ({
ф “ } ) = 0.
Положительный знак активной мощности свидетельствует об отборе
мощности НРД на частоте та> от источника, отрицательный знак —
о генерировании мощности на частоте пю в нагрузку.
В основе принципа обратимости лежат тождества
(8)
Ф(; })= - Л , ы ( {- ф " }); Р Р.к Л ф?} ) = J W ( - q > ; });
^ о({Ф ? })= С / о( { - Ф ? }),
в справедливости которых можно убедиться подстановкой в (2), (3) фазо­
вых углов ФГ= Ф°, Фг= -ф ° и заменой переменной интегрирования х на -6
для случая фг= - ф®.
Обозначение { - ф ° } в (8) соответствует совокупности фазовых углов
Ф° с обратными знаками по всем индексам г. При воздействии на НРД
заряда (1) с начальными фазами ф = -ф “ на основании (8) вместо (7) по­
лучаем соотношения
(9)
/ % ш ({-ф “ } ) < 0, Л ^ Л Ь Ф ? } ) > 0, Ра./ш({-ф“ } ) = 0.
Из (7), (9) следует, что изменение знака фазы ф" воздействия (1) при­
водит к преобразованию НРД активной мощности с частоты жо на часто­
ту wco, т.е. к изменению направления передачи энергии в КПЧ. При этом
в силу сохранения знака и значений реактивных мощностей (8) НРД ба­
ланс реактивных мощностей (6) для КПЧ на всех частотах кш не наруша­
ется, остается неизменным и напряжение смещения U0 (8), обеспечиваю­
щее заданное значение постоянной составляющей Q0 заряда (1). Это сви­
детельствует о возможности физической реализации режима: для изме­
нения направления передачи энергии в КПЧ достаточно к его выходу
подключить источник колебаний с частотой «со, а ко входу — нагрузку,
выбрав соответствующим образом их параметры.
На рис. 1 приведены схемы замещения КПЧ на частотах кш (к е г) для
режимов работы, при которых на НРД воздействует заряд (1) с начальными
фазами ср“ (рис. 1,а) и -<р“ (рис. 1,6). При этом предполагается, что источни­
ками колебаний являются идеальные источники ЭДС, а нагрузкой — актив­
ные сопротивления; используемые в КПЧ фильтры не имеют потерь. На
схемах обозначено: Q*k = Qk exp cpr° ; Q~k = Qkexp(- (p®); Cto, Rku>— соответст­
венно эквивалентные емкость и активное сопротивление НРД на частоте Асо;
Е ha — ЭДС, создаваемая НРД на частоте /хо; Lk, Ск, Rk, Е к— соответствен­
но индуктивность, емкость, активное сопротивление и ЭДС внешних по от­
ношению к НРД цепей КПЧ на частоте кш. Выражения для эквивалентной
емкости на частоте Лео, активных сопротивлений НРД на частотах тш, «со и
амплитуды ЭДС, создаваемых НРД на частотах /исо, «со, с учетом (8), (5),
можно записать в виде
г
( 10)
/7
= kuQl
2Р„р.Лсо
2 Рa,mto
2Р„
=-
2Р
R„„, —-
2Р
=-
где Ра.гаш, Рр.ш определяются выражениями (2) при срг = ср°.
Рис. 1. Схемы для пояснения принципа обратимости
кратного преобразования частоты
При настройке колебательных контуров (рис. 1) в резонанс на частоту
кш справедливо равенство
, 11Ч
(кш)2ЬкСкСкш
В этом случае для схем замещения на рис. 1,а и рис. 1,6 выполняются
следующие соотношения:
(12)
Ет = rn<j)QmRmm (p£m = ф” + п /2 , Епш= no)Q„R„,
(13)
Еп —п(0()l:R,,(п, ф£л = —ФИ+ я /2 , Е,т) —mitiQwRm,
где Eh ф£4 — соответственно амплитуды и начальные фазы источника ЭДС
с частотой кш; Е^ — амплитуда ЭДС, создаваемой НРД на частоте to .
Если выбрать Ет = Ети1, Е„ = Е„ш, Rm= R mui, R n = Я тм то, принимая во
внимание (10) и учитывая возможность произвольного выбора начальных
фаз ф£т, фЕ„ источников ЭДС, получим две тождественные системы урав­
нений (11), (12) и (И ), (13) для стационарных режимов работы КПЧ с
передачей энергии в прямом (рис. 1,а) и обратном (рис. 1,6) направлени­
ях соответственно.
Полученные результаты позволяют сформулировать следующий
принцип обратимости: если в КПЧ на НРД с однозначной характеристи­
кой реализован режим работы НРД, при котором колебания с частотой
/исо преобразуются в колебания с частотой исо, т о при отсутствии по­
терь на холостых частотах /со существует другой стационарный ре­
жим работы НРД с передачей энергии в обратном направлении.
Принцип обратимости справедлив не только для рассмотренных двухпо­
люсных НРД, но, как будет показано в параграфе 6.5, и для реактивных мно­
гополюсников, например, для ферромагнитных НРЭ с ортогональным
управлением (см. рис. 1,6; п. 6.1).
О применении принципа обратимости. Принцип обратимости показы­
вает, что в КПЧ при отсутствии потерь и идеальной фильтрации требуемых
частот возможно изменение мест включения источников сигналов и нагруз­
ки. При соответствующем выборе их параметров сохраняется стационарный
режим работы с теми же амплитудами воздействующих на НРД колебаний
(в том числе и постоянными составляющими), однако знак фазовых углов
изменяется на обратный. Равенство реактивных мощностей (8) при противо­
положных знаках фазовых углов воздействия свидетельствует о том, что
подключение источника сигналов к выходу КПЧ, а нагрузки — к его входу
сохраняет знак и величину расстройки фильтров, вносимой НРД.
Следует указать на два основных фактора, которые могут препятствовать
практической реализации принципа обратимости. Наличие потерь в реаль­
ных условиях приводит к тому, что при изменении мест включения источни­
ка сигналов и нагрузки будут изменяться не только знаки фазовых углов, но
и их значения и амплитуды воздействующих на НРД колебаний в стацио­
нарном режиме. При этом могут не выполняться требуемые условия сущест­
вования стационарного режима. Другим ограничивающим фактором явля­
ются условия мягкого самовозбуждения колебаний в КПЧ, выполнение ко­
торых продиктовано практическими соображениями. Несмотря на это,
принцип обратимости весьма полезен для теории и техники кратного преоб­
разования частоты. Во-первых, он указывает на принципиальную возмож­
ность существования двух стационарных режимов в одном КПЧ с кратно­
стями больше и меньше единицы, более того, показывает, что в идеальных
условиях эти режимы отличаются лишь знаками фазовых углов, воздейст­
вующих на НРД колебаний. Во-вторых, использование принципа обратимо­
сти значительно упрощает проведение теоретических исследований КПЧ,
сокращает объем вычислительных работ по оптимизации энергетических
показателей и определению параметров схемы КПЧ, позволяет с общих по­
зиций рассмотреть вопросы схемотехники КПЧ.
6.4. Синтезированные нелинейные реактивные
элементы
Введение. Улучшение технико-экономических характеристик мощных узлов
и устройств радиоэлектронной аппаратуры относится к одной из важнейших
проблем современной электроники. Успешное решение этой проблемы воз­
можно только на основе использования наиболее эффективных способов
преобразования энергии. К их числу относятся способы преобразования ко­
лебаний с помощью нелинейных реактивных элементов (НРЭ), потенциаль­
ный КПД которых равен 100%. Класс таких НРЭ составляют элементы, в
которых нелинейная зависимость между воздействием и откликом обуслов­
лена физическими процессами, протекающими в ферромагнетике, сегнетоэлектрике и полупроводниковом р—«-переходе. Однако современный уро­
вень развития НРЭ не позволяет в полной мере использовать этот эффектив­
ный способ преобразования при построении мощных узлов и устройств.
В частности, область применения выпускаемых отечественной промышлен­
ностью полупроводниковых НРЭ (варикапов, варакторов), получивших наи­
более широкое распространение в диапазоне радиочастот, ограничена в на­
стоящее время устройствами информационного типа из-за невысоких уров­
ней преобразуемых мощностей. Другой класс образуют электронные анало­
ги НРЭ, построенные на основе усилителей с фазовращателем в цепи обрат­
ной связи (реактивные каскады, гираторы и др.). В электронных аналогах
НРЭ нелинейная зависимость между воздействием и откликом достигается
благодаря нелинейности вольт-амперных характеристик транзисторов. Про­
текание постоянного тока через транзисторы приводит к большим потерям
мощности и делает электронные аналоги непригодными для применения в
мощных устройствах. Поэтому вопросы, связанные с улучшением свойств,
характеристик и параметров известных типов НРЭ, поиском новых техниче­
ских решений, расширением областей применения НРЭ в мощных устройст­
вах различного назначения, представляют большой практический интерес и
заслуживают самого пристального внимания.
Автором предложен новый класс НРЭ [32, 33], синтезированных на ос­
нове управляемых ключей и накопителей энергии (отсюда название эле­
ментов «синтезированные»). Синтезированные НРЭ (СНРЭ) способны ра­
ботать с малыми потерями при высоких уровнях преобразуемых мощно­
стей. Экспериментальные исследования подтвердили практическую воз­
можность СНРЭ с малыми потерями мощности в диапазоне частот от 50 Гц
до 100 МГц и показали эффективность их применения для перестройки час­
тоты автогенераторов, управления амплитудой и фазой гармонических коле­
баний, для умножения, деления частоты и других преобразований. Ниже
излагаются принципы построения СНРЭ. В параграфе 10.5 приведено крат­
кое описание практических схем некоторых аналоговых устройств. Подроб­
ные сведения о принципах построения, моделировании, оценке свойств
СНРЭ, а также об особенностях и эффективности применения СНРЭ для
преобразования параметров гармонических колебаний, о методах расчета и
определения основных характеристик устройств можно почерпнуть в [27].
С точки зрения синтеза НРЭ представляют интерес цепи, составлен­
ные из двух элементов — управляемого ключа и конденсатора или к а­
тушки индуктивности, так как каждый из этих элементов потенциально
способен не потреблять активной мощности. При построении НРЭ на
основе таких цепей необходимо выявить оптимальные условия коммута­
ции ключа и осуществить их схемную реализацию.
Оптимальные условия коммутации клю ча в цепях с одним нако­
пителем энергии. Задача состоит в определении моментов замыкания и
размыкания ключа, при которых цепь из идеальных элементов не потреб­
ляет активной мощности. Решим эту задачу для цепей, содержащих ем ­
костные элементы.
П о с л е д о в а т е л ь н а я ц е п ь (рис. 1,а). На рис. 1,б изображе­
ны временные диаграммы напряжения u{t) (пунктирная линия) и заряда q(t)
(сплошная линия) для произвольных условий коммутации ключа. В замкнутом
состоянии ключа К заряд в цепи пропорционален напряжению: q(t) = Cu(t).
После размыкания ключа q(t) = q(tp) = const. При замыкании ключа в произ­
вольные моменты времени возникают скачки (разрывы) заряда (рис. 1,6).
Представим цепь на рис. 1,а в виде двухполюсника с вольт-кулонной ха­
рактеристикой (ВКХ) q(u). Форма характеристики, полученной из времен­
ных диаграмм u(t), q(t) путем исключения времени t, приведена на рис. \,г.
Наличие гистерезисных участков в виде треугольников свидетельствует о
потерях мощности в цепи. Активная мощность двухполюсника пропорцио­
нальна сумме площадей треугольников ВКХ. Таким образом, даже в цепи,
составленной из идеальных элементов, возможны потери мощности. Это
объясняется тем, что скачки заряда приводят к 8-импульсам тока. Активная
мощность рассеивается на сопротивлениях выводов элементов и прямом
сопротивлении ключа, имеющих в реальных условиях конечное значение.
Рис. 1. Оптимальные условия коммутации ключа в последовательной цепи
с емкостным накопителем
Оптимальным условиям коммутации ключа соответствует равенство ну­
лю активной мощности, что достигается путем устранения разрывов в от-
клике заряда q(t). Для этого необходимо замыкать ключ в момент времени
когда напряжение на конденсаторе u(t) станет равным напряжению м(/р) в
момент предшествующего размыкания (рис. 1,6). Форма ВКХ для оптималь­
ных условий коммутации ключа приведена на рис. 1,6 и представляет собой
безгистерезисную функцию. Поэтому для принятых условий цепь на рис. 1,а
является идеальным нелинейным емкостным двухполюсником, который в
отличие от известных типов НРД обладает более широкими возможностями,
позволяя изменять форму ВКХ. Точками на ВКХ (рис. 1,г,6) отмечены мо­
менты размыкания (?р) и замыкания (t3) ключа.
П а р а л л е л ь н а я ц е п ь . Если на цепь (рис. 2,а) воздействовать
зарядом q(t) в виде непрерывной функции, то при замыкании ключа в произ­
вольные моменты времени t\ возникают скачки в отклике напряжения u(t)
(рис. 2,6), которые приводят к появлению гистерезиса в кулон-вольтной ха­
рактеристики (рис. 2,г). Для устранения скачков необходимо замыкать ключ,
когда напряжение на конденсаторе становится равным нулю. Форма харак­
теристики для этого случая приведена на рис. 2,6. Отсутствие гистерезиса
свидетельствует о том, что цепь не потребляет активной мощности.
Таким образом, в цепях с идеальными элементами оптимальные условия
коммутации выполняются, если его замыкание не вызывает разрывов заряда
или напряжения. Размыкать ключ можно в любые моменты времени.
Ц е п и с и н д у к т и в н ы м э л е м е н т о м . Эти цепи являются
дуальными по отношению к рассмотренным цепям с емкостным элементом
и в дальнейшем не рассматриваются. Пользуясь принципом дуальности, все
полученные результаты для СНРЭ с емкостными элементами легко перене­
сти на этот случай. В частности, оптимальные условия коммутации выпол­
няются, если его размыкание не вызывает разрывов потокосцепления или
тока. Замыкать ключ можно в любые моменты времени.
Синтез нелинейных реактивны х элементов. К вопросу построения
НРЭ на основе цепей, составленных из управляемого ключа и накопителя
энергии, подойдем с позиций синтеза, рассматривая его как задачу поис­
ка и схемной реализации алгоритма коммутации ключа, обеспечивающе­
го заданную форму характеристик НРЭ (рис. 1,6 и рис. 2,6).
А л г о р и т м к о м м у т а ц и и к л ю ч а . Для решения задачи в
общем виде воспользуемся характеристиками на рис. Ъ,а,б, на котором
обозначено x(t) — воздействие, y(t) — отклик. Ключ должен находиться в
разомкнутом состоянии при выполнении неравенств
<7(0
Рис. 2. Оптимальные условия коммутации ключа в параллельной цепи
с емкостным накопителем
Рис. 3. Форма обобщенных характеристик СНРЭ
При нарушении условий (1) ключ должен перейти в замкнутое состояние.
Путем преобразований два неравенства (1) могут быть объединены в одно:
(2)
| х « - 0 ,5 С Г + Х -)|>0,5(Х +- ; Г ) .
Неравенства (1) и (2) служат основой для построения алгоритмов коммута­
ции ключа. Под алгоритмом будем понимать регламентированную последова­
тельность схемно реализуемых функциональных преобразований воздействия
x(t), приводящих к выработке команд управления ключом. Воспользовавшись
(1), (2), построим следующие алгоритмы коммутации ключа в виде математи­
ческих выражений для управляющих сигналов:
(3)
zn{t) = Fn(E r-M x ) + Fn( M x - E ¥)-
(4)
z„{t) = Fn(\ M x-E x\-E 2)-
где М — константа, имеющая в общем случае размерность; Е = M X ,
Е* = M X, Е, = 0,5М(Х~ +Х), Е2 = 0,5 М(Х*-X ) — источники постоянного
(опорного) напряжения; п = 1 или 2;
^ ,( а ) =
ГО п р и а < 0 ;
;
[ а при а > 0;
fz ° п р и а < 0 ;
F2( а ) = \
|z' п р и а > 0 ;
Z°, Z1 — амплитуды прямоугольных импульсов, соответствующие логи­
ческому нулю или единице; знаком «+» в (3) обозначена операция ариф­
метического или логического сложения (ИЛИ).
Алгоритмы (3), (4) включают в себя такие схемно реализуемые функ­
циональные преобразования или математические операции:
=> масштабирование воздействия x(t) или умножение на константу М,
реализуемое с помощью датчика воздействующих колебаний;
=> инверсию (изменение знака величины, умножение на -1 ), которая мо­
жет быть реализована при использовании инвертирующего усилителя,
трансформатора или переполюсовки зажимов;
=> алгебраическое или логическое сложение, осуществляемое последова­
тельным соединением элементов или логическим элементом ИЛИ;
=> взятие модуля переменной величины, реализуемое в мостовых бесфильтровых схемах выпрямителей;
=> операцию F,(cx) ограничения переменной величины а снизу на нуле­
вом уровне, реализуемую в однополупериодной бесфильтровой вы ­
прямительной схеме;
=> операцию F2(а ) определения знака переменной величины или сравне­
ния двух напряжений с выдачей двухуровневой информации в виде
разнополярных прямоугольных импульсов с амплитудами Z1, Z0, осу­
ществляемую с помощью компаратора.
Алгоритмы (3), (4) могут быть представлены в схемном виде. На
рис. 4 приведены схемы алгоритмов с использованием операции F i(a ) и
F2{a ).
Операция F ,(a )
Операция F2( а)
Мх
Алгоритм
( 3)
о)
Алгоритм
(4)
2
б)
21
и
г| 2
Мх
Е
£Г\ 1.
—
ч
- 4 Нечетные
характеристики
С=^>
Мх
гм
!_
21
е)
+.
Е, 1
В
L .H
..
Мх
С
^
Мх
-0 — F
-4 Мх
-© ■
Характеристики с одним
изломом
-й Мх
()
Z|
<^=>
Е
4
Рис. 4. Схемная реализация алгоритмов коммутации управляемого ключа
Схемная
реализация
алгоритма
ко м м ута­
ц и и к л ю ч а . Схемы реализации алгоритмов (3), (4) представлены на
рис. 4. Принцип работы схем на рис. 4,а,б, реализующих алгоритм коммута­
ции ключа для НРЭ с характеристиками общего вида (рис. 3), иллюстриру­
ется временными диаграммами, изображенными соответственно на рис. 5 и
рис. 6. Для наглядности в качестве входного воздействия выбрано гармони­
ческое колебание. Отметим, что напряжение \Мх-Е\\ (рис. 6,6) выделяется
на диагонали моста (рис. 4,6). Полученное в схемах с операцией F t(a) управ­
ляющее напряжение Z \( t ) может быть подано непосредственно на ключ или
сначала преобразовано в разнополярные импульсы z2(t) (рис. 5,5 и рис. 6,д),
например, путем усиления, ограничения амплитуды сверху и фильтрации
постоянной составляющей.
Алгоритм (3)
Алгоритм (4)
ж)
0}
J)
t
Рис. 5. Временные диаграммы,
поясняющие реализацию алгоритма (3)
t
Рис. 6. Временные диаграммы ,
поясняющие реализацию алгоритма (4)
В частном случае при построении синтезированных НРЭ (СНРЭ) с
нечетными характеристиками, для которых )С = -JC (рис. 3), необходимо
в схемах на рис. 4,а принять Е* = —ЕГ, что позволяет перейти к схемам с
одним источником смещения (рис. 4,в). В схемах на рис. 4,6 исключается
источник Е\, поскольку Е] = 0,5М()С + X ) = 0.
При построении СНРЭ с характеристиками, имеющими один излом,
можно принять max x(t) < X или min x(t) > X . В этом случае путем исклю­
чения «неработающих» элементов и цепей можно упростить схемы алго­
ритмов коммутации ключа. В частности, для неравенства max x{t) < X они
приобретают вид, показанный на рис. 4,г.
Приведенное в общих чертах описание алгоритмов коммутации
ключа в цепях с одним накопителем энергии не претендует на полно­
ту, а лишь свидетельствует о простых возможностях их построения и
схемной реализации. С ледует отметить весьм а важное обстоятельство:
с помощью напряжений Е (рис. 4,в) и Е+ (рис. 4,г) можно изменять
положение точки излома характеристик, т.е. получить семейство х а­
рактеристик.
С т р у к т у р н ы е с х е м ы С Н Р Э . К ак показано выш е, для
формирования сигналов управления ключом необходимо распола­
гать копией воздействия. Для получения напряжения Mx(t), пропор­
ционального воздействию , использую тся датчики. В зависимости от
вида воздействия (напряжение, потокосцепление, заряд, ток) входная
цепь датчика подклю чается параллельно силовой цепи СНРЭ или
последовательно с ней. Управляющие сигналы формируются в сх е­
мах управления ключом, принципы построения которых проиллюст­
рированы на рис. 4. Таким образом, на основе цепи, составленной из
управляемого ключа и накопителя энергии, при использовании д а т ­
чика воздействую щ их колебаний и схем ы управления ключом м о гут
быть синтезированы НРЭ с характеристикам и, изображенными на
рис. 3. С труктурны е схемы СНРЭ последовательного и параллельно­
го типов приведены соответственно на рис. 7,а и рис. 1,6. На схем ах
обозначено: С — конденсатор, или накопительный элемент, в кач е­
стве которого можно использовать катуш ку индуктивности; К —
управляемы й ключ; Еу — управляю щ ее напряжение для изменения
формы характеристик.
Как видно из приведенных схем, в функциональном отношении СНРЭ
представляют собой простейшие системы автоматического регулирова­
ния, минимизирующие потери мощности при произвольной форме воз­
действующих колебаний.
С
q, I
Ujx
и\
К
С х ем а
Д атчи к
-----j
Еу
уп равлен и я
о-------
а)
Ыд
Д атч и к
Еу
--------- 1
С х ем а
уп равлени я
к
О —
б)
Рис. 7. Структурные схемы СНРЭ последовательного (а)
и параллельного (б) типов
С хем отехника СН РЭ. У п р а в л я е м ы е к л ю ч и . Прежде чем
касаться схемных вопросов, рассмотрим работу управляемых ключей,
что позволит сформулировать требования к ключам и строить схемы
СНРЭ с учетом конкретных условий работы. Для выявления условий ра­
боты ключей в емкостных СНРЭ можно воспользоваться временными
диаграммами, приведенными на рис. \,в и рис. 2,в. Из них видно, что:
=> при одинаковой форме и соответствующем образом выбранных ам ­
плитудах воздействий и оптимальных условиях коммутации напряже­
ния и токи управляемых ключей для СНРЭ последовательного и па­
раллельного типа равны между собой, т.е. условия работы ключей
совпадают;
=> в каждом из проводящих состояний ток может протекать в обоих на­
правлениях;
=> в каждом из запертых состояний напряжение на ключе униполярно,
однако при смене состояний полярность изменяется;
=> замыкание и размыкание ключа происходит при нулевом уровне на­
пряжения на ключе;
=> при переходе из одного состояния в другое ток ключа изменяется
скачкообразно.
Приведенные условия работы ключей относятся к СНРЭ с характеристи­
ками общего вида, которые изображены на рис. 3. Для выявления условий
работы ключей в СНРЭ с характеристиками, имеющими один излом, вос­
пользуемся рис. 8, на котором представлены структуры силовых цепей
СНРЭ (рис. 8,а ) и соответствующие им характеристики (рис. 8,6), а также
временные диаграммы (рис. 8,в) напряжения ик на ключе, протекающего
тока iK и заряда qK(пунктир). Из временных диаграмм видно, что:
=> в откры том состоянии через ключ протекает ток в обоих направле­
ниях;
=> в запертом состоянии на ключ воздействует униполярное напряже­
ние, что, как будет показано ниже, упрощает его реализацию.
а)
6)
Рис. 8. Условия работы ключей в СНРЭ с характеристиками,
имеющими один излом
Условия работы ключей в СНРЭ с индуктивными накопителями энер­
гии можно выявить на основе принципа дуальности.
Таким образом, в общем случае для построения СНРЭ необходимо
располагать управляемыми ключами двухстороннего действия (УКДД),
способными
=> находиться в запертом состоянии при обеих полярностях приложен­
ного напряжения;
=> проводить ток в обоих направлениях в проводящем состоянии;
=> под действием управляющего сигнала переходить из одного состоя­
ния в другое независимо от значений протекающих токов и прило­
женных напряжений.
Общие требования к УКДД отражены на рис. 9 в виде вольт-амперных
характеристик. При Z1 управляемый ключ находится в проводящем состоя­
нии и его сопротивление мало, при Z0 ключ заперт и его сопротивление ве­
лико (рис. 9,а). Для идеального ключа вольт амперные характеристики сов­
падают с координатными осями (рис. 9,6). В СНРЭ с характеристиками,
7-1881
имеющими один излом, можно использовать ключи, вольт-амперные харак­
теристики которых содержат три ветви из четырех (рис. 9,в,г).
i
i
i
/ J' t
t
z°
—- -
Z°
и
U
и
и
2х
Z1
Z1
1
'
-
/
б)
в)
г)
Рис. 9. Вольт-амперные характеристики управляемых ключей
двухстороннего действия
Из полупроводниковых приборов подобными вольт-амперными характе­
ристиками обладают тиристоры. Что касается известных типов транзисто­
ров, то они разрабатывались как приборы, предназначенные для работы в
униполярных режимах, и применяются, как правило, в цепях с источниками
постоянного напряжения. Поэтому их вольт-амперные характеристики хо­
рошо изучены лишь для первого квадранта. Отсутствие достаточной инфор­
мации о форме характеристик транзисторов в третьем квадранте затрудняет
оценку возможностей их использования в качестве ключей в цепях перемен­
ного тока. Однако можно высказать некоторые соображения и прогнозы.
Биполярные транзисторы не могут быть использованы как УКДД из-за
асимметрии /?—«-переходов (коллекторный переход имеет большую площадь
и выдерживает большее обратное напряжение, чем эмиттерный; усиление в
прямом включении значительно больше, чем в инверсном).
Иначе обстоит дело с МДП-транзисторами. Экспериментальные ис­
следования показали возможность их использования в качестве управ­
ляемых ключей в емкостных СНРЭ с характеристиками, имеющими один
излом. Однако этот вопрос требует детального изучения.
Отсутствие управляемых ключей в виде готовых изделий заставляет при­
бегать к их синтезу с помощью различных полупроводниковых приборов.
Принципы построения УКДД базируются на создании униполярного режима
работы транзисторов с помощью полупроводниковых диодов. Рассмотрим
некоторые схемные решения ключей, приведенные на рис. 10:
=> в схеме на рис. 10,а для униполярного режима работы транзистора
используется мост;
=> в схемах на рис. 10,б,в для пропускания тока в обоих направлениях
используется два транзистора (п -р-п и р-п-р). Диоды служат для их
защиты от обратных напряжений;
=> параллельное подключение диода к транзистору (рис. 10,д) способст­
вует протеканию тока в обоих направлениях и естественному перехо­
д у ключа в проводящее состояние. В первой фазе проводит диод, во
второй — транзистор (рис. 8,в). Перевод ключа в непроводящее со­
стояние осуществляется подачей отрицательного напряжения на базу
транзистора. В запертом состоянии ключа должна сохраняться поло­
жительная полярность напряжения во всех режимах работы. Такой
ключ применяется в емкостных СНРЭ с характеристиками, имеющи­
ми один излом (рис. 8,о,б);
=> последовательное включение диода с транзистором (рис. 10,е) позво­
ляет сохранить запертое состояние ключа при обеих полярностях
внешнего напряжения. Однако в проводящем состоянии ток может
протекать только в одном направлении. Такой ключ применяется в
индуктивных СНРЭ с характеристиками, имеющими один излом.
Тиристорные ключи (рис. 10,г) с естественным выключением способ­
ны работать только в индуктивных СНРЭ.
+
-о
(-)
(-)
2Г
7 (+)
с
<
*
(+)
б)
J
■
Г п
д)
£
t
Ч
1
’
i
' -----о
е)
Рис. 10. Схемы управляемых ключей двухстороннего действия
Датчики воздействующих
к о л е б а н и й . Для фор­
мирования сигналов управления ключом необходимо располагать копией
воздействия. В зависимости от типа СНРЭ воздействием могут служить на­
пряжение, заряд, потокосцепление, ток. Датчик должен преобразовать воз­
действие в напряжение подобной формы. В последовательной схеме
(рис. 7,а) датчик подключается непосредственно к силовым зажимам СНРЭ.
Чтобы не оказывать шунтирующего действия, сопротивление датчика долж­
но быть большим. В параллельной схеме СНРЭ (рис. 1,6) датчик включается
последовательно с силовой цепью, его сопротивление должно быть малым.
Со стороны выходных зажимов датчик как источник напряжения должен
иметь малое внутреннее сопротивление.
На рис. 11 приведены схемы датчиков, построенных на пассивных эле­
ментах. Так же как и на рис. 7, схемы датчиков изображены в виде четырех­
полюсников. Для наглядности на схемах показано воздействие x(t) и выход­
ное напряжение датчика в форме Mx(t). Датчики напряжения (рис. 11 ,а), ис­
пользуемые в емкостных СНРЭ последовательного типа, представляют со­
бой делители напряжения. Потенциометрический датчик (рис. 1 \,а) позволя­
ет сохранить информацию о постоянной составляющей воздействующего на
СНРЭ напряжения u(t). Датчик заряда (рис. 11,6) в емкостном СНРЭ парал­
лельного типа представляет собой конденсатор с достаточно большой емко­
стью С д , а датчик тока (рис. 11,г) в индуктивном СНРЭ — резистор с весьма
малым сопротивлением R. Датчик потокосцепления (рис. 11 ,в) в СНРЭ по­
следовательного типа с индуктивным накопителем энергии является инте­
гратором напряжения, поэтому параметры должны удовлетворять условию
RC » Т , где Т— период воздействующих колебаний. В схемах устройств на
СНРЭ датчиками могут служить элементы колебательных контуров.
к
q'C3
и
7
к
7
к
б)
Г
о-----------
в
1 “V
С—
- i КС
>
<
а)
7
К
Ri
—
Я
о— « ----- И---- 1-
¥|
t
Рис. 11. Схемы датчиков воздействующих колебаний
С х е м ы у п р а в л е н и я к л ю ч о м . Основу таких схем может
составить компаратор, обеспечивающий наилучшие условия коммутации
управляемого ключа в СНРЭ. Стандартные компараторы имеют доста­
точную выходную мощность; время переключения выходных сигналов
составляет десятки (и даже единицы) наносекунд; разрешающая способ­
ность — десятые и сотые доли милливольта. На высоких частотах можно
использовать пассивную цепь управления, совмещенную с колебательной
системой устройства на СНРЭ.
6.5. Нелинейные реактивные многополюсники
и их свойства
Модели многополюсных ферромагнитных элементов строят на основе
индуктивных или магнитных двухполюсников. Такой подход может быть
оправдан при моделировании ферромагнитных элементов с простой кон­
фигурацией магнитопровода. При сложной конфигурации магнитопровода целесообразно исходить из представления модели многополюсника в
виде многомерного объекта. Для этого выявим особенности и возможные
способы описания идеальных нелинейных реактивных многополюсников
(ИНРМ) и их основные свойства. Отметим, что до настоящего времени в
теории нелинейных цепей отсутствует понятие многомерных нелиней­
ных реактивных элементов.
Способы описания ИНРМ. Рассмотрим 2А'-полюсник (рис. 1), к к-м по­
люсам (к-к) которого приложено напряжение uk(t), а через к-с полюсы —
протекает ток /(/). Приращение энергии 2/С-полюсника за время Т составляет
(1)
A W = f^ A fV k,
к=\
где
tQ+ T
(2)
A W k = \ik{t)uk{I)dt.
'О
Для индуктивного 2Аг-полюсника uk(t) = d\\fk{t)/dt, поэтому выражение
(2) может быть представлено в двух формах:
Ч Х 'о+П
(3)
AW k =
j
Ч'Ко+Т')
ik(t)d y k(t)
=/*(f)i|/*(0[° -
V ( 'o )
jV(0<**(0v « 'o )
Выберем в качестве воздействия потокосцепление \|/(0, а отклика —
ток /*(/). Тогда для описания индуктивного 2^-полюсника можно исполь­
зовать следующее семейство характеристик в однородном базисе:
(4)
гА= / *(1| Л ...,\ Л где£ = 1 ,...Д .
Для семейства характеристик (4) выявим условия, при которых ин­
дуктивный многополюсник обладает способностью запасать и сохранять
энергию, т.е. является идеальным реактивным
многополюсником. Для этого, воспользовав­
шись первой формой представления AW* в (3) и
характеристиками (4), запишем выражение (1)
в виде криволинейного интеграла
(5)
дw= j f y v
<!)*=>
вдоль кривой (L) в А"-мерном пространстве,
заданной в параметрической форме совокупно­
стью выражений
=
(к = 1,...,АГ), причем
при изменении t от t0 до t0+T точка ( V .■■•>¥*)
описывает кривую (L) от А до В.
Из теории функций нескольких веществен­
ных переменных известно, что:
=> если сущ ествует функция W= W ( \ y \|/^),
для которой
(6)
дW
,к
, ,
— г- = i , где£ =
Рис. 1. Представление
многомерного
нелинейного реактивного
элемента
7.
Эу
то криволинейный интеграл (5) вдоль любой кривой (L) определяется
только ее началом А и концом В, т.е.
Вк
в
(7)
AW=
= jdW = W (B)-W (A);
А*=1
А
=> необходимым и достаточным условием существования функции
W = Щ \ V|/*) для односвязной области АГ-мерного пространства,
удовлетворяющей соотношениям (6), является выполнение равенств
= ------- , где т , п —1
(8)
Э у"
при этом тФгг,
Э \|Г
=> для семейства характеристик (4) существует единственная, с точно­
стью до постоянного слагаемого, функция W=
Для наиболее важных в практическом отношении частных случаев
соотношения (8) имеют вид
(9)
Э /1
Э /2
Э\)12
Э\]/'
Э /1
Эi 2
di2
Эг3
Эг3
Ых
д\\12
Э \|/‘ ’
Э \|/3
Э \|/2 ’
Э\|/'
Э\|/3
г =— г
^
„
для К = 2;
д л я К= 3.
Доказательство соотношений (8), (9) строится на взаимосвязи криво­
линейного интеграла по контуру поверхности с интегралом по самой по­
верхности. Для К = 2 эта взаимосвязь выражается известной формулой
Грина, для К = 3 — формулой Стокса.
Из (7) следует, что независимость криволинейного интеграла от пути
равносильна равенству нулю этого же интеграла по любому замкнутому
контуру (L), т.е. при А = В. Поэтому нелинейный реактивный многопо­
люсник не потребляет энергии (АИ/= 0), если его характеристики (4)
удовлетворяют условию (8), а воздействующие потокосцепления
(к =
являются периодическими с периодом Т функциями, т.е.
1|/(?0) = Ц1к(1(1+Т). Если же все потокосцепления цг*(7) = const, то измене­
ния энергии (5) в многополюснике не происходит. Для консервации энер­
гии достаточно замкнуть накоротко все зажимы к-к многополюсника.
Многополюсник с указанными свойствами является и д е а л ь н ы м
реактивным многополюсником.
При использовании в выражении (1) второй формы представления
AW* (3) можно получить способ описания ИНРМ в другом однородном
базисе с помощью семейства характеристик V|/ = \\ik(i',...,iK), а при исполь­
зовании обеих форм представления AW1' (3) — способы описания в сме­
шанных (гибридных) базисах.
Рассмотрение способов описания идеальных нелинейных реактивных
многополюсников показывает, что семейство характеристик многопо­
люсника (4) не может быть выбрано произвольным образом, а между ни­
ми сущ ествует определенная связь (8), (9), вытекающая из однозначной
(с точностью до постоянного слагаемого) зависимости энергии
^ (ty ’,...,\|/*) многополюсника от заданных воздействий (независимых пе­
ременных).
Ч астотно-энергетические соотношения д л я ИНРМ . Допустим, что:
=> ИНРМ описывается семейством характеристик (4), для которых вы­
полняются условия (8);
=> воздействующие на к-е полюсы потокосцепления и отклики токов к-х
полюсов являются iV-мерными периодическими с периодом 2л функ­
циями, представленными ^-кратными рядами Фурье в комплексной
форме:
(10)
V *(t „...,t w ) =
£ ...
£
<
»Ч=-~ mjV=-0°
(11)
i'* (T ,,...,T j= f \ . . £
/Я|=-<» mN=-°o
.... „ „ x e x p f e x O ;
\Л=1
ik
mi...mjv xexp £ > * 0 .
\ n—\
J
где к =
т„ = со,/; ю„ = 2п/Т„; Ащ
= 0 , 5 Ащ... т„ехрОфт|>....т„ ) ;
Ак
щ mv, ф*П
| mv — амплитуды и начальные фазы гармонических колебаний
с
комбинационными
частотами
Aktm v cos|
\л=1
+Фт,...mv
)
к-х полюсов; Ад 0 = 0,5Ад ; Ад — постоянная составляющая воздейст­
вия и отклика к-х полюсов;
(1 2 )
А к_ щ
..._и„ =
(13)
/ * ..
A 'mk
... mN =
т
„
А кщ
...т и х е х р ( - 7 Ф ^ ... Ян) ;
= т А д т f..-}ik( V v . . , v ' ' ) e x p f - ; X w, TnV Ti’- ^ TNо о
V
Я=1
/
Отметим, что символы Л и ф, введенные для сокращения записи, от­
носятся к потокосцеплению (10) и току (11).
Для ИНРМ справедливы следующие частотно-энергетические соот­
ношения:
(14)
X
т"=° т»=~
mn"LPt
-------------= 0;
£ w rcor
Г=1
и=1, ... ,N.
Вывод (14) основан на представлении для многополюсника суммы ак­
тивных мощностей всех колебаний с комбинационными частотами
N
сощ
= ]Г т„(0 „ в двух формах и приравнивании коэффициентов соЛ=1
ставляющих с одинаковыми частотами [30].
оо
К
Для случая N = 1 из (14) получаем соотношение £ X
=0, которое
ту =0 к =1
подтверждает ранее установленный факт отсутствия потерь энергии в иде­
альном многополюснике при (одномерном) периодическом воздействии.
Для двухполюсников (К = 1) при N = 2. из (14) следуют известные со­
отношения Мэнли — Роу
оо
I
со
Z
mt =0m2= ^ °
yyj
р
со
= 0;
QO
Y ft
Р
I
= о, гдеш И|,И2 = щ щ + т 2щ .
m,=-o"m2=0 ® т1.т2
Таким образом, частотно-энергетические соотношения (14) обобщают
известные уравнения Мэнли — Роу на многополюсник и показывают их
справедливость для суммарных активных мощностей всех пар полюсов
многополюсника.
Принцип обратимости передачи энергии. Принцип обратимости
для нелинейных реактивных двухполюсников (см. п. 6.3) обобщается на
многополюсники. Для его доказательства используются уравнения гар­
монического баланса мощностей, описывающие стационарный режим
работы многополюсника в некотором гипотетическом устройстве [30].
Ф о р м у л и р о в к а п р и н ц и п о б р а т и м о с т и : если для
ИНРМ реализован ^-мерный периодический режим (10), (11), при ко­
тором:
=> для подмножества комбинационных частот оо*Р I..... PN
„ колебаний к-х полюсов из множества оД mfj активная мощность колебаний Pa*pi
>0 ;
=> для подмножества частот ш*0 ..... rN
„ - Р*
„ < 0 ’;
а-1! ..... rN
=> для подмножества частот ш*
, - Р*
>-Ч......’
= 0,
и при этом активные мощности удовлетворяют соотношениям (14), то
сущ ествует другой (инверсный) режим с такими же амплитудами и про­
тивоположными знаками начальных фаз колебаний комбинационных
частот, при котором передача энергии через многополюсник происходит в
обратном направлении.
В [30] приведены примеры применения принципа обратимости для
наиболее важных в практическом отношении случаев некратного и крат­
ного преобразования частоты.
Идеальные нелинейные реактивные многополюсники могут быть ис­
пользованы, в первую очередь, при моделировании ферромагнитных
элементов со сложной конфигурацией магнитопровода, например, в виде
битора или двух U-образных магнитопроводов, развернутых на 90° и со­
стыкованных друг с другом (см. п. 6.1, рис. 1). Принцип обратимости
позволяет с единых позиций подойти к вопросам схемотехники и анализа
преобразователей частоты на нелинейных реактивных элементах.
7. МОДЕЛИРОВАНИЕ НЕЛИНЕЙНЫХ
ЭЛЕМЕНТОВ И ЦЕПЕЙ
7.1. Общие сведения
Понятие модели. При моделировании электронных схем одним из главных
вопросов является разработка математических моделей активных и пассив­
ных нелинейных элементов (НЭ), поскольку они определяют такие противо­
речивые требования, как временные затраты на проведение анализа и объем
памяти, с одной стороны, и точность конечных результатов — с другой.
Под моделью нелинейного элемента обычно понимают любое описа­
ние (математическое, схемное, графическое и др.), отражающее с требуе­
мой точностью его поведение в реальном электронном устройстве (при
заданных условиях или выбранных режимах работы). На основе моделей
НЭ строятся схемные математические модели электронных устройств.
Классификация моделей нелинейных элементов. Рассмотрим ос­
новные классификационные признаки моделей.
Характер отображаемых процессов:
=> статические модели, представляемые вольт-амперными характери­
стиками, схемами замещения без реактивных компонентов или алгебpaHnecKHMHehfdytybzvb;
динамические модели, задаваемые схемами замещения с реактивными
компонентами или дифференциальными уравнениями.
Способ представления:
=> графические модели, заданные в виде графиков вольт-амперных ха­
рактеристик (в справочной литературе) или схемами замещения;
zz> аналитические модели, заданные в виде аналитического описания, напри­
мер, аппроксимирующих выражения для вольт-амперных характеристик;
=> табличные модели, представленные в виде цифровых таблиц. Часто в
табличной форме представляют данные, соответствующие графикам
экспериментальных характеристик нелинейных элементов. Такая таб­
лица совместно с подпрограммой интерполяции для получения про­
межуточных данных позволяет существенно ускорить вычисления;
=> цифровые, или алгоритмические, модели, представленные в виде под­
программы. Такие модели вследствие сложности связей между токами
и напряжениями рассчитываются численными методами по соответ­
ствующему алгоритму и методу вычислений. Исходная модель может
быть задана в аналитической, графической или табличной форме, в
виде нелинейных дифференциальных уравнений или в виде сложной
схемы замещения, уравнения для которой составляются и решаются
непосредственно с помощью компьютера.
Характер нелинейности:
=> кусочно-линейные модели, нелинейность которых проявляется в огра­
ниченном числе точек стыка линейных участков;
=> нелинейные модели с нелинейностью характеристик элементов произ­
вольной формы.
Диапазон амплитуд рабочих сигналов:
=> модели для малого сигнала, или малосигнальные модели, для которых
амплитуды сигналов ограничены малыми отклонениями токов и на­
пряжений от стационарной рабочей точки. Это, как правило, линей­
ные модели, для которых нелинейность характеристик не учитывается
или учитывается как крутизна в рабочей точке;
=> модели для большого сигнала, в которых используется весь рабочий
интервал характеристики элемента.
Диапазон рабочих частот:
=> низкочастотные модели, в которых инерционность модели на высо­
ких частотах не учитывается,
=> высокочастотные модели, в которых инерционность учтена либо
дифференциальным уравнением, описывающим переходный процесс
внутри компонента, либо дополнительными внешними емкостями и
индуктивностями.
П о р я д о к м о д е л и : модели нулевого, первого, второго поряд­
ков и т.д. Этот классификационный признак отражает численные методы
расчета нелинейных схем в зависимости от порядка используемых в них
производных и помогает определить пригодность МНЭ для включения в
программу расчета схем.
Уровень сложности:
полные модели, формируемые непосредственно объединением отдельных
компонентов, входящих в устройство, в общую систему уравнений;
=> макромодели, получаемые аппроксимацией полных моделей.
Способ определения параметров:
=> физические модели предполагают в своей основе изучение физиче­
ских закономерностей, присущих устройству, вследствие чего струк­
тура уравнений и параметры модели имеют определенное физическое
толкование. Физические модели НЭ, в свою очередь, подразделяют:
• на электрические модели, представляющие систему уравнений,
отражающих связь токов и напряжений в элементе, или описы­
ваемую этой системой эквивалентную электрическую схем у,
составленную из идеальных элементарных компонентов (рези­
сторов, индуктивностей, конденсаторов, источников тока и на­
пряжения и т.д.).
• на физико-топологические модели, параметрами которых являю т­
ся геометрические размеры характерных областей проектируемого
устройства и электрофизические свойства материала.
• на технологические модели, базирующиеся на параметрах техно­
логических режимов изготовления проектируемых компонентов,
например на температуре или времени диффузии.
Последние два вида моделей ввиду сложности и большой погреш­
ности измерения внутренних параметров моделируемого устройства,
а также больших затрат машинного времени, как правило, на этапе
схемотехнического проектирования не используются;
=> формальные модели, параметры которых находятся, как правило, с
помощью экспериментального измерения на внешних зажимах реак­
ции исследуемого устройства на тестовое входное воздействие.
О сновны е требован ия к м оделям . Можно выделить три категории
требований к МНЭ:
=> требования разработчика элементной базы, которые сводятся к
тому, что модель должна быть построена относительно физико­
топологических управляемы х параметров, чтобы иметь возмож­
ность разработать элемент и реализовать расчетные значения его
параметров;
=> требования разработчика схем электронных устройств. С этой точ­
ки зрения МНЭ должна быть построена относительно электрических
параметров, имеющих ясный схемотехнический смысл, чтобы можно
было оценить влияние элемента на свойства и характеристики устрой­
ства; для каждого электрического параметра желательно располагать
данными о средних значениях, статистическом разбросе, темпера­
турных, режимных зависимостях;
=> требования разработчиков программ, которые предъявляются к МНЭ
с точки зрения включения их в программы и реализации различных
численных методов расчета схем.
Отметим, что некоторые из требований противоречат друг другу, а в
выполнении таких требований, как небольшое число параметров МНЭ и
достаточная точность модели, заинтересованы все разработчики.
О
точности моделей. Оценку точности моделей транзисторов и дио­
дов часто производят по степени совпадения вольт-амперных характери­
стик модели и реального элемента [16]. В качестве возможных оценок
можно использовать:
=> максимальное относительное отклонение в заданном рабочем диапа­
зоне (критерий Чебышева)
( 1)
5 г 1Ю 1/Л —
-
X .
где х м, хк — токи i или напряжения и вольт-амперных характеристик
модели и реального компонента;
взвешенное среднеквадратическое относительное отклонение в задан­
ном рабочем диапазоне
( 2)
./=1
где п — число точек измерения; а,- — вес отклонения в /'-й точке.
На тех участках вольт-амперной характеристики, где требуется луч­
шее совпадение, веса выбираются больше.
Приведенные оценки точности одного компонента можно назвать де­
терминированными оценками, поскольку в них не учитывается статисти­
ческий разброс вольт-амперных характеристик.
При серийном изготовлении компонентов наблюдается расхождение
вольт-амперных характеристик, обусловленное разбросом их внутренних
параметров. Расхождение можно учесть с помощью закона распреде­
ления оценок (1), (2), полученного путем статистического моделирова­
ния. В этом случае наряду с величиной ошибки по оценкам (1) или (2)
можно указать ее вероятность или, задав доверительную вероятность,
найти соответствующую ей ошибку. На практике используют менее кор­
ректные, но более простые способы учета статистического разброса в
оценках ошибок, основанные на имеющихся данных. Например, если
задана область экспериментального разброса характеристик (без указания
закона распределения), то, моделируя параметры модели элемента по
нормальному закону, можно для каждого напряжения uj вычислить про­
цент попадания значений тока в область экспериментального разброса.
Оценку точности динамических моделей можно получить в результа­
те сравнения окликов модели и реального элемента на тестовый сигнал.
Систематизация показателей и параметров НЭ. Для выявления и оцен­
ки свойств нелинейных элементов, характеризующих возможности и эффек­
тивность их применения в конкретных устройствах, используются системы
показателей и параметров. Систему показателей образуют электрические
величины и характеристики: токи, напряжения, мощности, КПД, амплитуд­
ные, модуляционные и частотные характеристики и др. Система параметров
формируется с помощью показателей и дает их количественную оценку в
цифровой форме. Например, предельно допустимые параметры НЭ представ­
ляют собой набор максимально допустимых мгновенных, действующих и
(или) средних значений напряжений, токов, мощностей. Основой для построе­
ния систем показателей служат, как правило, модели, отражающие принцип
функционирования и основные свойства НЭ. Система показателей и парамет­
ров зависит от типа нелинейного элемента и его назначения. Активные эле­
менты описываются вольт-амперными характеристиками, которые легко по­
лучить экспериментально на постоянном токе. Однако транзисторы и диоды
имеют собственные системы показателей и параметров. Характеристики не­
линейных реактивных элементов (НРЭ) могут быть получены путем тестиро­
вания на переменном токе. При моногармоническом воздействии основными
показателями НРЭ являются реактивная и активная мощности на частоте воз­
действия. Их отношение (добротность) характеризует качество выполнения
реальных НРЭ. Зависимость добротности от частоты позволяет судить о час­
тотных свойствах элемента и определить диапазон частот, в котором он по
свойствам близок к идеальному НРЭ. Зависимости реактивной мощности от
амплитуды воздействия и смещения характеризуют способности НРЭ как
управляемой реактивности. В полигармоническом режиме, который характе­
рен для НРЭ при их использовании в кратных преобразователях частоты, це­
лесообразно использовать другие показатели: преобразуемую мощность, ко­
эффициент передачи мощности, КПД и др. Для некоторых типов НРЭ, напри­
мер варакторов, применяют свои системы показателей и параметров. Таким
образом, единой системы показателей и параметров НЭ не существует. На их
формирование в сильной мере влияют способы моделирования и представле­
ния моделей, режим работы НЭ и другие факторы.
7.2. Способы математического моделирования
нелинейных элементов
Математической моделью реального объекта называют математическое
описание, достоверно отражающее его поведение или функционирование
при заданных условиях.
Цель моделирования нелинейных элементов (НЭ) — выявление с по­
мощью математического описания основных свойств и параметров ре­
альных элементов, а также построение математических моделей элек­
тронных устройств.
Задача математического моделирования состоит в отыскании опера­
тора (или алгоритма), устанавливающего связь м еж ду внутренними и
внешними параметрами НЭ. Следует выделить д в е г р у п п ы ук а­
занных параметров первичные и вторичные.
Первичными внутренними параметрами НЭ являются физико­
топологические параметры отдельных компонентов НЭ: размеры облас­
тей компонентов, подвижность носителей зарядов, характеристики мате­
риала и др. Вторичные внутренние параметры — это токи (заряды) и
напряжения (потокосцепления) на выводах отдельных компонентов.
К первичным внешним параметрам относятся токи и напряжения на
внешних зажимах НЭ. С их помощью вычисляются вторичные внешние
параметры (максимальные и средние значения токов и напряжений, час­
тотные характеристики, эффективные активные и реактивные сопротив­
ления на отдельных гармониках воздействия, длительности фронтов им­
пульсов и задержек и др.), которые позволяют оценить основные свойст­
ва и показатели реальных НЭ.
Вид функциональной связи и содержание понятий внутренних и
внешних параметров элемента определяется его назначением, принципом
функционирования, физической сущностью, способом использования и
рядом других факторов. В зависимости от целей проектирования внут­
ренними параметрами могут быть электрические или конструктивно­
технологические параметры элемента. Если модель предназначена для
расчета схемы устройства, то параметрами являются токи и напряжения.
При использовании модели для проектирования самого элемента в каче­
стве внешних параметров используют заряды и плотности токов. Для
активных элементов (транзисторов и диодов) связь меж ду внешними и
внутренними параметрами в общем случае определяется на основе фун­
даментальных уравнений движения носителей заряда в твердом теле
(уравнений переноса, непрерывности и Пуассона).
Вопросы построения математических моделей НЭ имеют первосте­
пенное значение при моделировании различных электронных устройств,
так как от их решения зависит достоверность теоретических исследова­
ний. Кроме того, математические модели позволяют оценить свойства
реальных НЭ и прогнозировать эффективность их применения для тех
или иных функциональных преобразований колебаний и сигналов.
Приведем краткое описание о с н о в н ы х с п о с о б о в м о д е ­
л и р о в а н и я и форм представления моделей нелинейных элементов.
Следует иметь в виду, что многие НЭ (транзисторы, СНРЭ и др.) имеют
сложные многокомпонентные схемы замещения. Поэтому излагаемые
ниже способы моделирования можно в равной мере рассматривать и как
способы моделирования электрических цепей.
Микромоделирование НЭ. Переход к машинным методам анализа и
расчета электрических цепей выдвинул более жесткие требования к моделям
электронных устройств (узлов), и в первую очередь — к повышению точно­
сти математических моделей отдельных элементов и компонентов. Наиболее
полная информация о поведении НЭ может быть получена на основе мате­
матического описания отдельных компонентов схемы НЭ и составления
уравнений взаимосвязи между ними. При этом математическая модель
СНРЭ состоит из системы топологических и компонентных уравнений.
Форма представления уравнений определяется назначением модели, базисом
переменных и методом составления уравнений, степенью детализации моде­
лей отдельных компонентов, методом решения уравнений, способом вклю­
чения уравнений модели НЭ в математическую модель устройства и рядом
других факторов. Так, модель НЭ для динамического режима, построенная с
использованием метода переменных состояния, содержит в общем случае
систему из обыкновенных дифференциальных нелинейных уравнений пер­
вого порядка, нелинейных алгебраических и трансцендентных уравнений.
При расчетах на ЦВМ исходная система уравнений должна быть представ­
лена в разностно-итерационной форме.
Таким образом, микромоделирование предполагает детальное мате­
матическое описание НЭ, представленного в виде электрической схемы
(подсхемы). Такой способ моделирования, ориентированный на машин­
ную реализацию, широко освещен в литературе по автоматизации схемо­
технического проектирования [8, 15, 16].
Макромоделирование НЭ. Введение макромоделей диктуется потреб­
ностью понижения размерности системы уравнений для модели разрабаты­
ваемого устройства. Это в первую очередь касается устройств, выполненных
на интегральных схемах (ИС). Даже использование при моделировании про­
стейших моделей транзисторов не решит проблему размерности модели,
если ИС содержит сотни и тысячи транзисторных структур. Поэтому в этом
случае единственной альтернативой ее решения является переход к макро­
моделированию. При построении макромодели стремятся исключить (со­
хранив особенности схемотехнического решения узла) второстепенные эле­
менты, не влияющие на его основные характеристики. Для отражения неидеальности характеристик реального узла в модель добавляют элементы
(входные и выходные сопротивления, инерционные звенья и др.). Принципы
построения макромоделей изложены в [25], там же приведены макромодели
ряда аналоговых и цифровых узлов.
При макромоделировании синтезированных НРЭ, представляющих
собой подсхему, выделяются силовая и информационно-управляющая
цепи. Для силовой цепи, содержащей накопитель и управляемый ключ,
составляются уравнения. Затем строятся макромодели узлов, входящих в
информационно-управляющую цепь СНРЭ: датчика воздействующих
колебаний и схемы управления, которая может содержать ИС компарато­
ра. После этого осуществляется стыковка уравнений для силовой и информационно-управляющей цепей СНРЭ. Форма представления уравне­
ний макромодели СНРЭ зависит от типа элементов, используемых в ка­
честве управляемого ключа, и выбранных их схем замещения или мате­
матических моделей, от степени сложности технических решений датчи­
ка воздействия и схемы управления ключом и детализации математиче­
ского описания их макромоделей [27].
Идентиф икация НЭ. Под идентификацией понимают построение ма­
тематической модели объекта (НЭ, цепи) по априорной информации о
его поведении [12, 34-37]. Простейшим примером идентификации явля­
ется идентификация резистивных нелинейных элементов на постоянном
токе, когда модель строится путем аппроксимации снятых эксперимен­
тально вольт-амперных характеристик. Однако полученная модель отра­
жает только статические свойства элементов. Кроме того, такой подход
неприемлем для идентификации нелинейных реактивных элементов.
В общей постановке задача идентификации НЭ состоит в определении
структуры и параметров оператора А, устанавливающего связь меж ду
воздействием х и реакцией у.
Один из главных вопросов идентификации — выбор формы описания
модели НЭ. Если для линейных цепей сущ ествую т универсальные опера­
торы (например, импульсная характеристика), то для нелинейных цепей
такие операторы неизвестны. Для их описания используют различные
способы: интегральные, нелинейные дифференциальные и трансцендент­
ные уравнения, функциональные ряды, нелинейные однозначные и мно­
гозначные функции, семейства кривых и др. Выбор формы описания за­
висит от априорной информации о НЭ, степени соответствия модели НЭ
оригиналу, эксплуатационных требований к модели и т.д.
Другой вопрос — выбор метода исследования. Известны пассивный и
активный методы идентификации. При пассивном м етоде модель стро­
ится по результатам наблюдения за объектом в реальных условиях. Для
идентификации нелинейных элементов обычно используется активный
м етод, при котором априорную информацию получают эксперименталь­
но с помощью детерминированных тестовых сигналов (ТС). При задан­
ной структуре оператора выбор ТС подчинен, как правило, требованию
существования и единственности решения задачи идентификации. После
того как определены структура оператора А и класс ТС, задача иденти­
фикации сводится к нахождению параметров и характеристик оператора,
представляющих собой некоторые константы, функции, математические
выражения. Во многих случаях эта задача рассматривается как само­
стоятельная задача идентификации нелинейных элементов, для реше­
ния которой используются различные подходы и методы. Немаловажную
роль при идентификации играют вопросы схемной или аппаратурной
реализации метода, оказывающей основное влияние на точность полу­
ченных математических моделей.
Сопоставление способов м оделирования. При микромоделирова­
нии можно построить модели, наиболее полно отражающие свойства ре­
альных объектов. В частности, микромодель синтезированного НРЭ по­
зволяет выявить режимы работы отдельных его компонентов, оценить
влияние их параметров на свойства СНРЭ, дать обоснованные рекомен­
дации по выбору компонентов. К недостаткам этого способа моделиро­
вания следует отнести:
=> трудности построения микромоделей для некоторых компонентов
(микросхем, транзисторов и диодов в импульсных режимах и др.),
обусловленные их сложной структурой и протекающими процессами;
=> детализацию математического описания, которая лишает математиче­
скую модель универсальности;
=> эксплуатационные неудобства, связанные с решением систем уравне­
ний высокой размерности.
Макромоделирование ориентировано на выявление основных, наибо­
лее важных свойств моделируемого объекта и позволяет получить эко­
номное математическое описание объекта с сохранением принципа его
функционирования. Достоинство макромоделирования проявляется в
возможности наиболее полного удовлетворения противоречивых требо­
ваний простоты и точности моделей выбором степени детализации опи­
сания отдельных узлов и компонентов объекта.
Способ построения математических моделей объектов по извест­
ной информации о воздействии и отклике — идентификация объек­
т о в — привлекает внимание, прежде всего, своей универсальностью .
Он позволяет в ряде случаев, независимо от физической природы объ­
екта, получить его математическое описание в заданном (выбранном)
классе операторов по заранее разработанному алгоритму. Это досто­
инство наиболее ярко проявляется для линейных объектов, распола­
гаю щ их для описания, как указано выше, универсальны ми оператора­
ми. Д ругим примером являю тся ферромагнитные и полупроводнико­
вые НРЭ, идентификация которых может осущ ествляться в одном
классе операторов одними и теми же методами. Соответствую щ им
выбором оператора и тестового сигнала можно построить компро­
миссную модель, удовлетворяющую требованиям простоты и точно­
сти. Еще одно достоинство идентификации состоит в том, что она ба­
зируется на экспериментальных данных, в то время как при других
способах моделирования построенная модель требует тщательной
экспериментальной проверки. Построение модели по априорной ин­
формации придает уверенность в достоверности конечных результа­
тов моделирования.
Дальнейшее изложение посвящено методам идентификации, посколь­
ку вопросы микро- и макромоделирования достаточно подробно освеще­
ны в литературе.
7.3. Идентификация нелинейных двухполюсников
П о стан о вка задачи. Для простоты и удобства проведения теоретических
исследований математическую модель нелинейных двухполюсников
(НД) целесообразно представить в явном виде: у = Ах, где А — нелиней­
ный оператор; х — воздействие; у — отклик.
Задача идентификации НД состоит в определении оператора А по из­
вестным воздействию х(t) и отклику y(t), при этом должны быть конкре­
тизированы структура или форма оператора и найдены его количествен­
ные характеристики.
Выбор ст р у к т у р ы оператора А. Простейшей моделью НД может
служить однокомпонентная модель, для которой оператор А выражается
нелинейной функциональной зависимостью у =/(х). Однозначная харак­
теристика у = J(x) соответствует идеальному НД. Так как реальные НД
обладают в общем случае нелинейными диссипативными и консерватив­
ными (см. п. 1.2) свойствами, характеристика у =Дх) является неодно­
значной (гистерезисной при периодическом воздействии) функцией, за­
висящей от формы воздействия, что создает известные трудности при
описании модели. Поэтому целесообразно представить НД двухкомпо­
нентной моделью в виде схем замещения, изображенных на рис. 1.
А
Б
в
Г
Рис. 1. Двухкомпонентные модели нелинейных двухполюсников
Модели «А» и «Б» относятся к нелинейным емкостным двухполюсни­
кам, управляемым соответственно напряжением и зарядом, модели «В» и
«Г» — к нелинейным индуктивным двухполюсникам, управляемым потокосцеплением и током. Каждый из компонентов модели представляет
собой двухполюсник с однозначной характеристикой. Такие двухполюс­
ники будем называть безынерционными нелинейными двухполюсниками
(БНД). Один из БНД моделей на рис. 1 отражает консервативные (спо­
собность к сохранению энергии) свойства, а другой — диссипативные
(способность к поглощению энергии) свойства реальных НД. Как показа­
но ниже, свойства диссипативных моделей «£ », «Г» не могут быть отра­
жены с помощью БНД, описываемых вольт-амперными характеристика­
ми м6(г), г'6(и).
Схемы замещения на рис. 1 позволяют получить выражения для от­
клика НД и, следовательно, выявить структуру оператора Л, которая сво­
дится к двум формам:
d
гд е / F — однозначные нелинейные функции воздействия х; индексы «д »
и «и » относятся к нелинейным операторам А, включающим в себя линей­
ные операторы дифференцирования и интегрирования соответственно.
При выбранном операторе А задача идентификации НД сводится к опре­
делению характеристиках), F(x) БНД.
С во й ства тесто вы х сигналов. Допустим, что воздействие x(t) пред­
ставляет собой:
=> периодическую функцию с периодом Т;
=> четную функцию, для которой
(2 )
х(/) = х(-г);
=> монотонно убывающую (для определенности) функцию на отрезке [О,
772], причем
(3)
х(0)= Х +;х(Т/2)=Х~,
на отрезке [0, 772] существует по отношению к x(t) обратная функция
t = t(x) и ее производная t'(x) = dt/dx.
Воздействие с указанными свойствами будем называть тестовы м
сигналом (ТС). Запишем выражения для ТС в следующем виде:
(4)
x(t) = Х0 + Хтг\(/),
где Хт — амплитуда ТС; Ао — смещение; Г|(/) — периодическая функция.
Для ТС косинусоидальной формы
1
dx
(5)
T|(/) = cos со/; t = —arccosx; dt = — ------ш
on/l - х 2
гд е ш = 2тl/Т; х = ( х - Х 0)/Хт ; 1 6 [0 ,//2]; х е [ - 1 , + 1].
О существовании и единственности решении задачи идентифика­
ции НД. Пусть отклик y(t) НД на ТС (4) является периодической с пе­
риодом Т функцией, которую представим в виде суммы четной и нечет­
ной составляющих:
(6)
y(t)= y4(t) + y„(t).
Примем во внимание следующие факты:
=> при воздействии на двухполюсник с однозначной характеристикой
2 =А Х) колебания x(t) в виде четной функции (2) его отклик является
такж е четной функцией z4(t);
=> в результате дифференцирования или интегрирования четной функ­
ции z4(t) получается нечетная функция zH(t).
Тогда, как следует из (1), БНД с характеристикой fix) создает четную
составляющую, а БНД с характеристикой F{x) — нечетную составляю­
щую отклика (6). Таким образом, ТС позволяет «распознать» отклики,
создаваемые БНД двухкомпонентной модели (1), что свидетельствует о
существовании решения. Единственность решения обусловлена свойст­
вом монотонности ТС на отрезке [0, 772].
Для моделей Б и Г (рис. 1) БНД с характеристиками г/б(0> 4 (м) создают
синусоидальные составляющие нечетных гармоник и косинусоидальные
составляющие четных гармоник отклика (6), представленного в виде
тригонометрического ряда Фурье. Поэтому эти модели, с одной стороны,
не обладают полнотой, так как в отклике (6) отсутствуют четные гармо­
ники синусоидальных составляющих; с другой стороны, четные гармо­
ники косинусоидальных составляющих создаются обоими БНД модели,
что делает задачу идентификации БНД математически неразрешимой.
Рассмотрим один из методов идентификации.
Метод идентификации НД с постоянными параметрами ТС. Этот
(наиболее простой) метод позволяет по одной реализации отклика y(t) и
воздействия лг(/), заданных на интервале [-772,+Т/2], определить характе­
ристики J{x) и F{x) двухкомпонентных моделей (1). Он базируется на ис­
ключении времени t в отклике y{t) с помощью известного выражения (4)
для ТС. В зависимости от априорной информации возможны различные
формы представления искомых характеристик.
1. В том случае, когда известны четная и нечетная составляющие от­
клика (6), выражения характеристик модели НД имеют следующий вид:
f( x ) = y 4MX)];
Fa{x)= \y4[t{x)]t'{x)dx-,
=
где
x e [Х~,Х+].
2. Если отклик y(t) разложить по системе базисных функций, то ха­
рактеристики Дх), F(x) могут быть выражены через коэффициенты такого
разложения. Так, например, для отклика НД, представленного в виде три­
гонометрического ряда Фурье
y(t) = £ J^cos гШ + ^ s i n гШ,
г=0
получаем такие выражения для характеристик моделей (1):
(7)
f{ x ) = f X c o s гШ(х)\
^
|
|| = е { ГС0 W sin raw C t).
1 Л (* )] r = o [ r o j
Для ТС косинусоидальной формы (5) ряды (7) трансформируются в
ряды Ф урье по ортогональным полиномам Чебышева первого рода.
3. Выражения характеристик модели через ветви гистерезисной петли
НД, снятой осциллографическим способом, имеют следующий вид:
(В)
У*(х) + у~{х)
/ (* ) = 2
_ (У+(х)~У~(х)
t'(x)dx\
FJ X) = j
Fa(x) =
1
d y * {x )-y -(x )
t'(x) dx
2
где y*(x) = y[+t(x)}, y~(x) = y[-t(x)\ — верхняя и нижняя ветви.
Как следует из (2), (3), у +(Х+) = у~(Х+), у +(Х ) = у ~ (Х ). Поэтому со­
вокупность функций у (х) и у (х) в (8) образует гистерезисную функцию в
виде замкнутой петли.
С другими методами идентификации НД можно ознакомиться в [34—37].
7.4. Идентификация нелинейных
четырехполюсников
В веден и е. Для нелинейного четырехполюсника (НЧ) математическую
модель можно представить в виде оператора, устанавливаю щ его в я в ­
ной или неявной форме связь м еж ду воздействиями хк и откликами у к,
здесь и в дальнейшем индекс к = 1 относится к входным, индекс
к = 2 — к выходным полюсам НЧ. Предпочтение отдается явной фор­
ме операторов, не связанной с решением каких-либо уравнений. Вы­
явить форму оператора, определить его параметры и характеристики
можно путем тестирования НЧ. Давно известный и широко распро­
страненный простейший способ тестирования транзисторов при по­
стоянных напряжениях и токах (постоянных тестовы х сигналах — ТС)
позволяет получить семейства входны х и выходных вольт-амперных
характеристик, приводимые обычно в справочной литературе, и пред­
ставить оператор модели транзисторов в виде двум ерн ы х нелинейных
функций Ук=/к(х\,Х2). Однако такой способ тестирования обладает ря­
дом сущ ественных недостатков:
=> не позволяет снять характеристики во всей рабочей области напряже­
ний и токов транзистора из-за возможного выхода его из строя, по­
скольку используется статический режим;
=> не отражает динамических свойств транзисторов;
=> неприемлем для идентификации нелинейных реактивных элементов.
Тестирование НЧ с использованием изменяющихся во времени воз­
действий (переменных ТС) устраняет указанные недостатки. При этом
возможны способы тестирования НЧ с двумя переменными ТС и с одним
переменным и одним постоянным ТС.
В дальнейшем предполагается, что переменные ТС хк{х*):
=> являю тся четными периодическими (с периодом 2л относительно хк)
функциями, для которых:
(1)
хк(хк) = x,i-xk),
где т*=со^+фь шк=2п/Тк, Тк, щ = const, при этом юк, Тк, ф* — соответст­
венно частота, период и начальная фаза ТС;
=> представляют собой монотонно изменяющиеся на интервале [0, я]
функции, причем
*л(0) ~Хкъmin, Хк(П) —Хк тах,
имеют для обратных функций хк(хк) на интервале [.Хк. min, Xki max] первые
производные.
В качестве ТС могут быть использованы сигналы косинусоидальной и
треугольной формы. Для ТС косинусоидальной формы:
(2)
xk —Х к0
Х к,cosTt ,
= a r c c o s ---------------V
*л
)
для ТС треугольной формы:
dxk _
( 3)
J
dxk
л
2 Х к1
Предполагается также, что НЧ являются стационарными, удовлетво­
ряют условиям наблюдаемости, их реакция на внешние воздействия оп­
ределяется однозначно, отсутствую т режимы самовозбуждения.
Цель идентификации — выявить форму и определить характеристики
операторов моделей НЧ при различных способах тестирования.
И ден ти ф и кац и я НЧ при использовании п ер ем ен н ы х ТС. При
периодических воздействиях *i(T i), Х2(Х2 ) отклики четырехполюсника
м о гут быть представлены в виде двумерного тригонометрического
р яда Ф урье:
(4)
Ук(^1,т:2) = Z Z ^ C.L co sw ticos”t 2 + I *SCmnsinwTicoswx2 +
+ Ykcsm„cosmxlsmm2 + Ykssm„sinmT,sinnT2,
к = 1; 2.
Перепишем (4) в виде:
(5)
+ ^ “„,„cosm ismwT2 + ^“ „sinwx^inwx,,
кк .т п
Эт,
к = 1; 2.
Л2
-------- c o s /w t , c o sh x ., + -
Сг
Эх,Эт2 /яи
■coswT,cosrtT2, к = 1; 2.
На основании (5) четырехполюсник можно описать следующ им
оператором:
«у
Э2
„
у . = > г + ^ ; " +^ - л 0|+ -, , Л
dx,
(7X22
оТ|Эх2
«щ л -2
двумерные нелинейные функции независимых
где Л00, ^ 0, ^ ' . ^ 1
переменных х\, х2. При этом первый член оператора (6) отражает безынерци­
онные (статические) свойства НЧ, три последующих члена — инерционные
(динамические) свойства НЧ, обусловленные изменяющимися во времени
входным воздействием * i(ii), выходным воздействием х2(т2) и обоими воз­
действиями одновременно. Так как для ТС на интервале [0, л] существуют
обратные функции, то после подстановки Х[(х\), т2(х2) в (5) получаем сле­
дующие выражения для характеристик оператора (6):
у со
k.mn
(7)
W:
01
Уг
■=m-Q
t n=0
1
х c o s f m , (л:, )]c o s [« t2 (х 2 )] ,
Ук .
Yk . m J m ” .
где * * e [ ^ min, ^ raax],A: = l;2 .
Для ТС косинусоидальной формы (2) характеристики (7) выражаются
через полиномы Чебышева первого рода, а для ТС треугольной формы
(3) — через тригонометрические (косинусоидальные) функции.
Для определения коэффициентов Ykcmn, Ykcm„,
Yk'm„ характеристик
(7) воспользуемся тригонометрическим полиномом
~
(8)
^ ( д ,,^ ) =
М
N
т=0я=0
_
^
YkKmncosmft1cos>r&2 + Ykscmnsinnr&]cosrr&2 +
+ ^ L c o s w ^ i s i n « ^ 2 + ? * “L s i n w ^ i s i n , , ^2>
где
= T k - Q k ’ k = 1; 2 .
Полином (8) после подстановки Ф* = т* - ф* сводится к виду (4), что
позволяет получить следующие соотношения для искомых коэффициен­
тов характеристик (7):
(9)
Г“„„ = Ykccmrlcosm<plcosn(p2 - ^ “ „smm9,cosn(p2- ^„eos/wftsinwcpj +
„sin wcp,sin/Kp2;
yt"„, = C„sinm(p,cos«cp2 + У^„со5тф,со5«ф2 - К,“ nsir>m(p,sinяф, - C„cosrmp,sin жр2;
= ^ “ „cosf^sinmp, - Kt“ „cos/иф ,cosиф2 -
„sin/ я ф ^ т
иф,
-
„sin т ф , cosиф2;
= ^ “ „ s i n w v . s i n ^ ; + j ; “ „co s/m p|Sin « p 2 +
+
„sin/mp^os^ + Y^mncos тф, cos жр2.
Найдем коэффициенты полинома (8). Допустим, что известны значе­
ния (отсчеты) функции Уц(’&,,'&2) = Уа.рг для значений аргументов
(10)
Ъ] =Ъ1р = Р - 271
, р = 0, 1, 2 , 2М;
2М + 1
271
, г = 0, 1, 2 , 2JV.
= г2N +1
Тогда коэффициенты полинома (8) могут быть выбраны из условия
его равенства значениям у крг:
у сс
/ t.0 0
4
усс
2cos«i52r
усс
/ *,w 0
2cos/w&If)
усс
coswf), pcosn$2 r
л
(И)
2М 2N
J
{2M + \\2N + \ ) P , ^ kpr
у SC
к.т п
ycs
2sin/w&1;,
sinwrd, pcosn$2 r
2 sin «d 2r
1 кЛ п
у CS
cosw0[ ^sin n&2,r
у SS
sinOT&,
r
к,т п
где
=
2ш
2 кр
2 М + 1’
'2.г
2N +1
; т = 1, 2 ,3 ,..., М; п = 1, 2 ,3 ,..., N.
Введем ограничение на частоты ТС, полагая, что они относятся как
целые числа, не имеющие общего множителя:
(12)
со,/со2 = Р/Д.
В этом случае исходными данными для определения коэффициентов
полинома (8) могут служить отклики реального четырехполюсника в ви­
де одномерных периодических функций >>*(в), где в = ш/, со = 2п/Т,
T = PT)=RT2.
Пусть
известны
Ук., ~ Ук
где г = 0, 1 ,2 ,
отсчеты
одномерных
откликов
PR - 1. Тогда возникает задача по из­
вестным исходным отсчетам ,• одномерных откликов получить отсчеты
Ук.рг откликов четырехполюсника, представленных в виде двумерных
функций >"* (■©,, "&2) - Для ее решения воспользуемся следующими соот­
ношениями:
(13)
t), = Rb = i - —\ Ъ2 = РЪ = г'— ; г = 0, 1, 2, ...,PR -1 ,
Р
R
которые в параметрической форме задают двумерные функции
на интервалах О, е [0, 2 Ял], в 2 е [0, 2Рп]. Для перехода к
интервалу определения [0, 2я] по обоим аргументам
би в виде целых чисел и остатков:
(14)
± = а +£ ,
Р
P
i32 запишем дро­
- = В +- ,
R
R
где А, В — целые числа; р = 0, 1, 2 ,..., Р - 1; г = 0, 1, 2 ,..., Л -1 .
Если в (14) отбросить целые числа, то можно установить связь между
аргументом i одномерных дискретных функций у ц и аргументами р, г
двумерных дискретных функций у к рг, что равносильно решению по­
ставленной задачи. При этом область определения двумерных периоди­
ческих функций ^ ( в , , д 2) будет представлять собой равномерную сетку
на квадрате, длина стороны которого равна 2тг:
2л
(15)
Ъх = р — , р = 0 , 1, 2,...,/>-1;
Ь2 =
г г
К
= 0, 1, 2,...,R -\.
На рис. 1 для случая Р = 5, R = 3 проиллюстрирована связь м еж ду i
(в кружочках) и р, г. По стрелкам (или значениям i от 0 до 15) можно
проследить путь, который «пробегает» аргумент в одномерной функции
Л (^ ) при его изменении от 0 до 2л в области определения двумерной
функции y t (d,,f>2) , заданной на квадрате со сторонами 2л.
0
2 я/5
4я/5
6я/5
8я/5
2я
©i
Рис. 1. Связь между i и р, г (14)
Сопоставив (15) с (10), получим:
(16)
Р = 2М+ I, R = 2N + 1 .
Таким образом, требование аппроксимации двумерных откликов че­
тырехполюсника полиномами (8) накладывает ограничение (16) на соот­
ношение частот (12) ТС.
После определения коэффициентов (11) по формулам (9) рассчиты­
вают коэффициенты характеристик (7) оператора (6). Начальные фазы ф*
ТС могут быть определены, например, из осциллограмм одномерных от­
кликов НЧ и ТС, снятых на двухлучевом осциллографе, по смещению
меж ду первым отсчетом выбранных реализаций одномерных откликов
у к(-Q) и минимумом ТС. Если первый отсчет откликов совмещен с мини­
мумом ТС Х](Т|), то ф, = 0.
И дентиф икация НЧ при использовании переменных и постоян­
ны х Т С . Допустим, что известно два набора одномерных откликов четы­
рехполюсника у\( т ,), у\(т 2) , один из которых получен при использова­
нии переменного ТС Xi(Xi) для различных х2 = const, а другой — при ис­
пользовании переменного ТС х2(х2) для различных Xi = const. Запишем
отклики в виде тригонометрических рядов Фурье:
( 17)
у\ (х ,) = £ Y'k cm(х 2) coswx, + Y^m(х 2) sin w x ,,
т-О
х, = х, ( т ,), х2 = const;
(18)
_y*(x2 ) = X r ^ c ( * i ) c o s « x 2 + y *2ns ( * i ) s i n / ? T 2 ,
п=О
х, = const,
х 2 = х 2(т 2).
Для выявления формы оператора модели НЧ допустим, что набор значе­
ний х2 = const в (17) удовлетворяет х 2 = х2(х2) в (18), а набор значений х\=
const в (18) - Х]= xi(Xi) в (17). Введение фиктивных ТС х2 = х2(х2) для (17) и
Х]= Х|(т,) для (18) позволяет формально представить наборы откликов (17),
(18) в виде следующих двумерных тригонометрических рядов:
О 9)
г) = X Z ^ ™ C0SWTiC0SWT2 + r ^ s in m .c o s m :;,;
т=0«=0
(20)
у 2к(т ,,т 2) = I l n ^ c o s m ^ o s i r i j + 7t2^coswT,sin«T2.
m=0n=0
Так как в силу (1), (17), (18)
(21)
^ ( т , , х 2) = >'1(т. - х 2) ,
(т ,, х2) = jh*( - х ,, т2) ,
то по сравнению с (4) в (19) отсутствуют члены, содержащие sin их2, а в
(20) — члены, содержащие sin тТ\.
Полагая, что
= Yk *cn , и представляя совокупность откликов (19),
(20) в виде (5), получаем трехчленную форму оператора (6). Использова­
ние же при идентификации одного из откликов (19), (20) при к = const
ограничивает оператор (6) двумя членами.
Характеристики у °°, у™, у к' усеченных операторов (6) могут быть
представлены в виде двумерных функций:
(22)
у°° = у Г ( х , , х 2), у " = y lJ0(x l ,x 2);
У ? = У 2к °°(хх,х 2), у й
кх = у 1л \ х „ х 2),
гда
или семейств одномерных функций:
(23)
y f = у * 00(х 1), у'к° = ^ ло(х ,), х 2 = const,
(24)
у ?
= y 2M( x 2 ), y°kl = y 2k 0](x 2), x, = const,
X, е [X lmin, X lmaJ ;
x2 e
[X
2min,
X 2m^ \
Следует
отметить,
что
выполнение
равенств
Yk Q
*n = Yk^ n ,
,,00 _ ..1-00/•
\
2,00/
Ч
Ук - Ук Ui >х 2 ) = Ук (xi , х 2 ) свидетельствует о правомерности модели
НЧ в классе трехчленных операторов.
Для представления характеристик усеченных операторов (6) в виде
(22) или (7) необходимо определить коэффициенты рядов (19), (20). Эту
задачу можно решить аппроксимацией рядов (19), (20) тригонометриче­
скими полиномами (8). Особенность ее решения по сравнению с рас­
смотренным выше подобным случаем состоит в следующем:
=> двумерные периодические функции (19), (20) обладают свойствами
(21 );
=> для получения отсчетов двумерных функций (19), (20) в их области
определения, представляющей собой равномерную сетку на квадрате
с длиной стороны 2л, используются наборы одномерных откликов
у\(%\,х2), у 1(х {,т 2). При этом для первого набора постоянные значе­
ния х2 должны быть выбраны из условия х2 = х2(т2) с равномерным
шагом по т2 в пределах от 0 до л, а для второго набора — постоянные
значения х, из условия X] = Xi(T|) с равномерным шагом по Т) в тех же
пределах, где х^хк) — тестовые сигналы. Число откликов у1(х0 х2 ) ,
yl(x :,,т 2)
в
наборе должно быть равным соответственно N+1, М+1, а
число отсчетов в отклике — 2М+1, 2N+\. Таким образом, вместо ог­
раничения (12) на соотношение частот ТС вводятся ограничения на
число откликов в наборах и число отсчетов в откликах;
=> отсутствует необходимость замены переменных т* на 0* при переходе к
полиному вида (8), что дает возможность непосредственно определить
искомые коэффициенты без использования формул пересчета (9);
=> для расчета искомых коэффициентов можно пользоваться формулами
(11), если в них произвести соответствующую замену обозначений ко­
эффициентов. При аппроксимации у\(т, , т 2) коэффициенты при
sin пЬ2 полинома (8) можно не рассчитывать, так как их значения рав­
ны нулю в силу (21). По этой же причине для ^ ( т , , т 2) можно не рас­
считывать коэффициенты при sin тФ ь
Семейства одномерных характеристик (23), (24) могут быть представ­
лены в двух формах.
(25)
у ^ { х х)= X ^ ( x 2)c o s [w t1(x ,)] = 0,5[>’[ +( ^ ) + J;1''C ^)],
m=0
х2 = const;
.У*10( * i ) = Z
m=0
Yk'm(X-2--cos [отт, (х] )] =
™
= 0,5 j[.y*+( х ,) - у\-~(х, )]< (х, )dxx;
х2 = const;
У к'°° ( х г ) = Z
Y k,n ( x i ) c o s [n T 2 ( х 2 ) ] =
п=0
= 0,5[у2 +(х 2) + у 2,‘ (х 2)],
х, = const;
..2.01 t \ V 1 ~~
^
г
1 м
Ук (х 2 ) = } _ ------------- cos [их2( * ,) ] =
/7= 0
И
= °>5 1[^*,+(* 2 ) - Ук'~(х2 Ж
(* 2
) ^ 2 >*i = const;
где хке [Хктт, ХКmax]; У*1; ' (х2), У*1;* (х2), Yk2* (х , ), Y (х , ) — коэффициенты
исходных одномерных откликов (17), (18); х*(**), х'*(х*) — обратные
функции ТС xk(zk) и их первые производные;
1 ( jc, ); .У*2,±(х 2) — верхняя
(знак
исходных
«+ »)
и нижняя (знак
«-»)
ветви
характеристик
у 1 ( х \), Ук(х2) в виДе гистерезисных петель, полученных исключением
безразмерного времени х,, х2 в откликах ^|(х,), ,у*(х2) с помощью ТС
^ l ( t i ) , X 2(X 2).
С ледует отметить, что:
=> при однозначных характеристиках у [ ( х {), у 2к(х2) реального НЧ ха­
рактеристики модели у * |0(х ,) = 0 , у 2к °'(х2) = 0 и оператор (6) стано­
вится одночленным;
=> если в качестве откликов выбрать z = j'ydt и определить характери­
стики
z { 00( x 1) ,
z 2 00( x 2 )
модели НЧ как полусуммы верхней и ниж­
ней ветвей исходных гистерезисных функций z\(xx) , z 2(x 2) , то на
основании (17), (18) можно получить следующие соотношения:
** °°(* ,) =
(*,)/«>!, z2kM(x2) = У2к °\х2) / щ .
Эти соотношения позволяют более простым способом определить ха­
рактеристики ^ 10(х ,) при х 2 = const, у к2 Л] ( х 2 ) при х, = const (25), не при­
бегая к аппроксимации подынтегральных выражений и вычислению ин­
тегралов;
=> располагая семействами одномерных характеристик модели НЧ мож­
но путем их аппроксимации перейти к двумерным характеристикам
оператора (6).
С равнен ие методов идентиф икации НЧ. Достоинство метода
идентификации с использованием переменных ТС состоит в том, что че­
тырехчленный оператор (6) наиболее полно отражает динамические
свойства НЧ и позволяет по одной реализации откликов у к сразу опреде­
лить его характеристики в виде двумерных функций. Однако двумерный
ряд (7) для всех четырех характеристик операторов (6) содержит одина­
ковое число членов, которое определяется числами Р, R (16), зависящими
от отношения частот ТС (12). Поэтому усилия, затраченные на иденти­
фикацию безынерционных НЧ или НЧ со слабым проявлением инерци­
онных свойств, окажутся напрасными, так как для описания их моделей
можно использовать операторы (6) с меньшим числом членов. Следова­
тельно, метод с переменными ТС следует применять в том случае, когда
априорно известно, что НЧ обладает достаточно сильными инерционны­
ми свойствами.
Метод идентификации с использованием переменного и постоянного
ТС лишен указанного недостатка и позволяет, как показано в приведен­
ном ниже примере, постепенно наращивать число членов (от одного до
трех) операторов (6) модели НЧ.
Оба метода не требуют проведения трудоемких расчетов, их вычисли­
тельные алгоритмы легко программируются. Вычислительный алгоритм
при определении двумерных характеристик четырехчленного оператора
сложнее, однако расчеты носят разовый характер. Определение одномер­
ных характеристик операторов с меньшим числом членов требует прове­
дения многократных вычислений по более простому алгоритму.
С точки зрения получения исходной информации оба метода можно
считать равноценными, так как для их реализации достаточно распола­
гать отсчетами одномерных откликов в виде периодических функций.
Для получения исходной информации могут быть использованы стан­
дартные измерительные приборы, например, генераторы гармонических
колебаний и цифровые осциллографы, обеспечивающие с высокой точ­
ностью косинусоидальную форму (3) переменных ТС и измерение отсче­
тов требуемых одномерных откликов НЧ.
О реализации методов идентификации. 1. В ы б о р
вида
в о з д е й с т в и й . Использование при тестировании НЧ постоянных
(или содержащих постоянную составляющую) ТС с изменяющимися па­
раметрами ограничивает выбор вида воздействий напряжениями и тока­
ми, так как непосредственная реализации режимов тестирования с q =
= const и \|/ = const невозможна. На выбор вида воздействия (напряжения
или тока) влияют тип НЧ и схемные условия его работы. Например, для
резистивных НЧ, к которым относятся транзисторы, в качестве воздейст­
вия могут служить напряжения или токи. Если транзистор используется в
схеме резонансного усилителя с параллельными колебательными конту­
рами, включенными на его входе и выходе, то входным и выходным воз­
действием должно быть выбрано напряжение (откликами токи).
2.
В ы б о р ф о р м ы о п е р а т о р а . Выбор формы оператора
модели определяется априорной информацией о свойствах НЧ и усло ­
виях его работы, требованиями к точности результатов моделирова­
ния, аппаратурными возможностями получения исходных данных,
объемом и реализуемостью вычислений. Например, для транзисторов,
обладающих емкостными свойствами со слабо выраженными инерци­
онными свойствами, может быть выбран двучленный или трехчлен­
ный оператор (6).
П р и м е р . Проиллюстрируем возможности метода идентификации
для построения модели транзистора КТЗ15А по исходным данным, полу­
ченным для схемы на рис. 2 с помощью программы PSpice и графическо­
го постпроцессора Probe [44] при следующих условиях:
=> для тестирования используются косинусоидальные напряжения
(26) и, =£/,„ —С/, jcost прии2 = const;
иг = U2.о - U 2Acosx
прим, = const,
где т —ш = 2я/'/;/— частота ТС;
=> в качестве откликов транзистора могут использоваться как токи
и заряды qk = j i kdt.
так
Поэтому при использовании полученных выше выражений воздейст­
вия х* следует заменять на напряжения и*, а отклики у к, z* — на токи 4 и
заряды qk. Отметим, что Л*С*-цепи (к = 1 ,2 ) вводились в схему на рис. 2
только для получения откликов заряда. Параметры /?*С*-цепей выбира­
лись таким образом, чтобы их влияние на отклики транзистора было ми­
нимальным, при этом 1/(соС*)« R kДля
получения
исходных
данных
при
использовании
ТС
u\=Ui.o~ С/].1CO ST, и2= const сначала с помощью программы PSpice определя­
лись одномерные отклики токов /*(0 транзистора (17), а затем с помощью
графического постпроцессора Probe по известным воздействию it\(t) и от­
кликам i\{t) путем исключения времени на экран монитора выводились
вольт-амперные характеристики
(м ,) . Таким же образом определялись
характеристики i\ (и2) при использовании ТС u2=U2s - U2,, cos т, их= const.
Тестирование на частоте/=10 кГц показало, что все четыре семейства
вольт-амперных характеристик i\ (х ,) , i 2k (х2) , где к = 1 ,2 , являются од­
нозначными функциями. Это свидетельствует о том, что транзистор
представляет собой резистивный четырехполюсник, не обладающий
инерционными свойствами, и для его моделирования достаточно исполь­
зовать лишь два семейства, например, семейство входных ix' (и ,) при
M2=const и выходных i 'j 00(и2) при M!=const характеристик. На рис. 3,а,б
приведены вольт-амперные характеристики указанных семейств, полу­
ченные при следующих параметрах ТС (29):
(27)
Uu0= 0,5 В, Uu = 0,5 В, и2= 5 В, U2,0= 5 В, U2A = 4,5 В, щ = 0,8 В .
'2. Яг
Рис. 2. Схема, используемая в программе PSpice для получения динамических
характеристик транзистора
При тестировании на частоте /= 10 МГц вольт-амперные характеристики
транзистора представляют собой гистерезисные функции, поэтому оператор
(6) должен содержать, по крайней мере, два члена. Рассмотрим особенности
определения характеристик двучленного оператора при использовании одно­
мерных откликов /,'(/), i2(t) ■ Входные (и ,) и выходные i2(u2) вольтамперные характеристики приведены на рис. 3,в,г для тех же параметров (27)
ТС (26), что и при тестировании на частоте /= 10 кГц. Характеристики модели
транзистора г' 00 (и ,) при M2=const, /2 '00(и2)при Mi=const определяются как
полусумма верхней и нижней ветвей (25) гистерезисных функций ц (и ,) ,
/2 (м2) . Для определения характеристик г '10(м1) npHW2=const, г,'0' (мг ) ПРИ м'
= const по формулам (25) необходимо найти полуразность верхней и нижней
ветвей характеристик на рис. 3,в,г, произвести аппроксимацию подынтеграль­
ных выражений и вычислить интегралы. Однако, если вместо откликов тока
использовать отклики заряда (пропорциональные напряжениям, снимаемым с
Л*С*-цепей), то исходными данными будут служить вольт-кулонные характе­
ристики транзистора q\(м ,) , q2(u2) . Определив полусумму верхней и ниж­
ней ветвей этих характеристик, получим вольт-кулонные характеристики мо­
дели q\ ao(их) при и2 - const, <
7 2'00(и ,) при и2 = const и, следовательно, иско­
мые характеристики г,110(и ,) = о*?,100(и ,) , г22 01(и2) = о*?2'00(м2) . На рис. 3,д,е
приведены вольт-кулонные характеристики транзистора q\(ux), q2(u2) и
полусуммы их верхней и нижней ветвей, полученные для ТС (26) с парамет­
рами (27). По оси ординат отложены пикокулоны.
Рис. 3. Динамические характеристики и характеристики модели транзистора
Используя одномерные отклики г,2(г), i\(t) или q f(t), q\(t), можно
по изложенной выше методике получить недостающие семейства харак­
теристик г2 0,(м2) при U\ = const, г210(и|) при м2 = const трехчленного опе­
ратора (6).
В [31] рассмотрен вопрос о точности методов идентификации и при­
ведены другие формы операторов (6).
7.5. Моделирование транзисторов
Транзисторные структуры составляю т основу интегральных схем, яв­
ляю щ ихся элементной базой современной электроники. Вопросам мо­
делирования транзисторов посвящено огромное количество публика­
ций. П оэтому ограничимся краткими сведениями, касаю щ имися осо­
бенностей моделирования и формы представления моделей (см. также
п. 11.3, 11.4, 16.2).
Моделирование биполярных транзисторов. В о л ь т - а м п е р н ы е
х а р а к т е р и с т и к и т р а н з и с т о р о в . Биполярный транзистор
был задуман как прибор с управляемой резистивностью. Поэтому наибо­
лее полно свойства транзистора как нелинейного элемента можно опи­
сать с помощью вольт-амперных характеристик (ВАХ). Поскольку тран­
зистор является трехполюсным элементом, его входные и выходные токи
и напряжения достаточно сильно связаны друг с другом. Для полного
описания его свойств необходимо располагать по крайней мере двумя
семействами ВАХ, например семействами входных и выходных ВАХ.
При этом следует учитывать, что форма ВАХ зависит от схемы включе­
ния транзистора как усилительного элемента. В зависимости от того, ка­
кой электрод является общим для источника усиливаемых сигналов и
нагрузки, различают три схемы включения биполярного транзистора: с
общим эмиттером (ОЭ), общим коллектором и общей базой.
Рассмотрим семейства ВАХ для схемы включения с общим эмиттером
(рис. 1,а), в которой входными величинами являются напряжение между
базой и эмиттером(£/Бэ) и ток базы (/б), выходными величинами — на­
пряжение меж ду коллектором и эмиттером (С/кэ) и ток коллектора (/к).
Входные
х а р а к т е р и с т и к и . Семейство характеристик
/Б =/ft/вэ) при и Кэ = const приведено на рис. 1,6.
При напряжении £/кэ = 0, т.е. когда коллектор и эмиттер замкнуты на­
коротко, к обоим переходам приложено прямое напряжение £Убэ- Ток ба­
зы при этом является суммой прямых токов эмиттерного и коллекторного
переходов. Величина его незначительна, так как при реальных значениях
напряжения £/Бэ и сопротивления базы (десятки и более ом), на котором
падает часть входного напряжения LV). прямое напряжение эмиттерного
перехода составляет всего лишь десятые доли вольта (меньше контакт­
ной разности потенциалов UK).
Рис. 1. Включение транзистора по схеме общим эмиттером (о) и семейства его
входных (б) и выходных (я) вольт-амперных характеристик
При напряжении (/кэ > О характеристика сдвигается вправо, и ток ба­
зы значительно уменьшается по сравнению со случаем (/кэ = 0- Это про­
исходит по следующим причинам:
=> коллекторный переход смещается в обратном направлении, и его ток
уменьшается до величины обратного тока;
=> прямой ток базы мал, так как обусловлен лишь процессом рекомбинации;
уменьшается ширина базы (за счет расширения коллекторного пере­
хода при увеличении (Укэ)> и в ней происходит меньше актов рекомбинации.
В целом изменение (/кэ в режиме, когда UКэ > 0, мало влияет на ток
базы, и входные характеристики для различных значений (/кэ почти сли­
ваю тся. Поэтому в справочниках обычно приводится входная характери­
стика для некоторого значения (/Кэ и характеристика при (/кэ > 0.
В ы х о д н ы е х а р а к т е р и с т и к и . Характеристики /к = Д£/Кэ)
в схем е с ОЭ при /Б= const изображены на рис. 1,в.
В схеме с общим эмиттером выходное напряжение (Укэ приложено
одновременно к обоим переходам транзистора, и в зависимости от соот­
ношений между (/кэ и (/БЭ режим транзистора меняется.
При положительной полярности напряжений на базе ( ( / б э > 0 ) и на
коллекторе ((/к э > 0) и выполнении условия (/Кэ < ( / б э транзистор нахо­
дится в режиме н а с ы щ е н и я . В режиме насыщения выходной ток
транзистора является прямым током коллекторного перехода, и его вели­
чина прямо связана с напряжением на коллекторном переходе
(£4к =
~ иБЭ). Следовательно, ток насыщения зависит от (/кэ- Режиму
насыщения соответствует область ВАХ, расположенная левее пунктир­
ной линии (рис. 1,в).
Выходная характеристика при /б = 0 и t/кэ - 0 весьма близка к ВАХ по­
лупроводникового диода. Условие /б = 0 эквивалентно размыканию цепи
базы. Физически это соответствует равенству нулю результирующего тока
базы, складывающегося из тока источника t/кэ и противоположного ему по
направлению обратного тока /кбо- При этом в транзисторе от эмиттера к кол­
лектору протекает ток /кэо, называемый сквозным. Область ВАХ при 7б < 0
соответствует режиму о т с е ч к и .
При увеличении t/Kэ напряжение на коллекторном переходе сначала
станет равным нулю ( t /кэ = ^ бэ), а затем, когда при t/кэ > ^4>э переход
база — коллектор окажется обратно смещенным, транзистор переходит в
а к т и в н ы й режим. В активном режиме выходной ток транзистора
в основном определяется током, обусловленным инжекцией электро­
нов из эмиттера, а на семействе выходных ВАХ б удут наблю даться
пологие участки. А ктивному реж иму соответствует область В А Х , рас­
положенная правее пунктирной линии и выше выходной характери­
стики при /Б = 0.
Для математического описания биполярных транзисторов семейства
ВАХ аппроксимируют, представляя их, например, в виде кусочно­
линейных функций или степенных полиномов. Однако такая модель не
отражает инерционных (динамических) свойств транзистора, которые
обусловлены наличием емкостей его р-н-переходов. Рассмотрим особен­
ности динамических моделей транзисторов.
Слабосигнальная
модель
т р а н з и с т о р а . При
усилении слабых сигналов транзистор работает в режиме, при котором
изменения токов и напряжений происходят в окрестности рабочей точки
и линейно связаны меж ду собой. В этом случае в качестве модели тран­
зистора используют линейный четырехполюсник (рис. 2,а), описываемый
системой ^-параметров. Для случая, когда выбраны 7-параметры, систе­
ма уравнений имеет следующий вид:
Системе уравнений соответствует схема замещения транзистора, при­
веденная на рис. 2,6. Отметим, в области низких частот 7-параметры
представляют собой активные проводимости, которые могут быть опре­
делены по ВАХ транзистора.
/1
w
а)
к R1 в
о—*—CZJ—t—
б)
Свк
-C Z b
<VI
аоЛ
-ф К
/к
-«----«----о
Э
/-,
о-- •-
-м -
/,
-W -
/к к
- о
Рис. 2. Модели транзистора: в виде линейного четырехполюсника (а),
схемы замещения с К-параметрами (б), физической схемы (в)
и схемы Эберса — Молла (г)
Физическая
эквивалентная
схема
транзи­
с т о р а . На рис. 2,в приведена популярная физическая схема, широко
используемая для моделирования биполярных транзисторов в линейном
режиме. На схеме символом В обозначена так называемая внутренняя
точка базы. Назначение элементов схемы замещения:
=> цепь ЛБ, GB3 , СВэ учитывает активное сопротивление базовой области
и инерционные свойства эмиттерного перехода;
=> цепь GBk, Свк моделирует коллекторный переход;
=> управляемый источник тока SUE3 с внутренней проводимостью GK3
учитывает активные (усилительные) свойства транзистора, где S —
крутизна проходной характеристики транзистора.
Схема содержит только линейные элементы, поэтому ее можно рас­
сматривать как линейный четырехполюсник и известными методами оп­
ределить все параметры схемы. Если вместо управляемого источника
тока SUБЭ использовать проходную характеристику, то получим нели­
нейную модель транзистора.
М о д е л ь Э б е р с а — М о л л а . Эта модель в виде схемы за­
мещения (рис. 2,г), предложенной Эберсом и Моллом в 1954 г., исполь­
зовалась для описания вольт-амперных характеристик плоскостных тран­
зисторов. На схеме транзистор представлен в виде двух полу­
проводниковых диодов, имитирующих эмиттерные и коллекторные пере­
ходы, параллельно которым включены источники тока ОС0 / 2 и cto/i, учи­
тывающие взаимодействие переходов в реальных транзисторах. Такая
схема замещения транзистора получается, если пренебречь сопротивле­
нием базы и считать, что при изменении напряжений на эмиттерном и
коллекторном переходах условия прохождения носителей заряда в базе
не изменяются. Подобные упрощения позволяют относительно просто
получить выражения, связывающие токи транзистора / э , / к и / б с напря­
жениями на эмиттерном U-3b и коллекторном UKБ переходах. Следует
иметь в виду, что если эмиттерный переход смещен в прямом направле­
нии и через него проходит ток 1\, то ток в коллекторном переходе оказы­
вается меньше за счет рекомбинации части носителей в базе. В схеме это
учтено генератором тока <XqI\. Аналогично при инверсном включении
передача тока от перехода, играющего роль эмиттерного, к коллекторно­
м у переходу учтена генератором (Хо/г- Построенные на основе модели
Эберса — Молла динамические модели транзисторов (например, модель
Гуммеля — Пуна, см. п. 16.2) широко используются в программах схемо­
технического моделирования электронных устройств.
Рис. 3. Вольт-амперные характеристики (а, б)
и схема замещения (в) полевого транзистора
Вольт-амперные характеристики и схема замещения полевого
транзистора. При расчетах используются два семейства ВАХ для схемы
с общим истоком.
Семейство
выходных
х а р а к т е р и с т и к , представ­
ляющее собой зависимости тока стока /с от напряжения на стоке Uc при
напряжении на затворе С/з = const (рис. 3,а). Каждая характеристика этого
семейства имеет два различных участка — крутой, на котором ток 1с рез­
ко меняется при изменении Uc, и пологий, где ток стока практически не
зависит от напряжения Uc- Это связано с тем, что при малых значениях
напряжений Uc и некотором фиксированном значении U-$« U3oTCтранзи­
стор можно рассматривать как объемный резистор, в котором имеются
три различные области. Две из них имеют малое сопротивление. Одна
область располагается вблизи истока, а другая — вблизи стока. Третья
область — канал, поперечное сечение которого намного меньше попе­
речного сечения двух первых областей, имеет значительно большее со­
противление, и именно она определяет общее сопротивление транзисто­
ра. Поэтому в точном соответствии с законом Ома при малых значениях
Uc наблюдается практически линейная зависимость меж ду током /с и
напряжением Uq. П о мере роста напряжения Uq конфигурация канала
начинает меняться — происходит сужение канала, что замедляет рост
тока стока при увеличении напряжения между истоком и стоком. Транзи­
стор входит в режим насыщения, при котором ток /с изменяется незначи­
тельно. При Uc » Uc н а с в транзисторе наступает пробой р-я-перехода,
что приводит к резкому возрастанию тока стока. Общий вид семейства
выходных ВАХ транзистора аналогичен виду семейства выходных ВАХ
биполярного транзистора. Здесь такж е имеются области насыщения, ак­
тивного режима и отсечки.
Семейство
проходных
В А Х , представляющих собой
зависимости тока стока /с от напряжения на затворе £/3 при постоянном
напряжение на стоке Uq, приведено на рис. 3,6.
При работе в активном режиме основными параметрами полевого
транзистора являются крутизна характеристики, коэффициент усиления
транзистора и внутреннее сопротивление транзистора, которые опреде­
ляются с помощью ВАХ.
С х е м а з а м е щ е н и я . При расчете усилительных схем поле­
вой транзистор представляют в виде эквивалентны х схем . Упрощен­
ный вариант схемы замещения транзистора изображен на рис. 3,е. На
схеме обозначено: Свх — входная ем кость и сопротивление м еж ду за­
твором и истоком; Спр; Лс_з — проходная ем кость и сопротивление
меж ду стоком и затвором; Свых; Ли — проходная ем кость и внутреннее
сопротивление; SUз — генератор тока, отражающий усилительные
свойства транзистора.
В ольтамперны е характеристики и схема замещ ения МОПтранзистора. На рис. 4 приведены выходные и передаточные вольт­
амперные характеристики МОП-транзистора с индуцированным кана­
лом для схем ы с общим истоком, а на рис. 5 — физическая схем а за­
мещения транзистора.
Статические характеристики МОП-транзисторов со встроенным ка­
налом имеют такую же форму, как и ВАХ для МОП-транзисторов с ин­
дуцированным каналом. Однако они способны пропускать ток при обеих
полярностях напряжения на затворе.
Рис. 4. Выходные ( а ) и передаточные (б) вольт-амперные характеристики
МОП-транзистора с индуцированным каналом для схемы с общим истоком
с
Рис. 5. Физическая схема замещения МОП-транзистора
7.6. Универсальные нелинейные модели
Эффективное функционирование программ схемотехнического проекти­
рования достигается при использовании универсальных нелинейных моде­
лей (УНМ ), алгоритмы анализа которых в наименьшей мере зависят от
структуры и порядка цепи, от вида и режима работы используемых эле­
ментов. Способ описания математической модели во многом зависит от
базисных переменных. Переменные, позволяющие получить описание
модели из линейно независимых уравнений, называются базисными пе­
ременными. Базисные переменные определяются в результате решения
уравнений. Выбор базиса влияет на такие важные характеристики про­
граммы, как алгоритм формирования схемной модели, вид и размерность
системы уравнений (а следовательно, скорость и точность расчета), типы
допустимых в схеме зависимых источников i(u), /(/), и(и), u(i) и др. В [1]
выделено четыре разновидности УНМ. Рассмотрим их особенности.
УН М в базисе переменных состояния. Для этой модели в качестве
независимых переменных используются напряжения на емкостях и токи
в индуктивностях, называемые переменными состояния. Такую модель
можно представить в виде линейного резистивного многополюсника
(рис. 1,а), к зажимам которого подключены индуктивности и емкости,
характеризующие переменные состояния (ис, it), зависимые источники
напряжения и тока (е„ г3), характеризующие нелинейные свойства схемы,
а также независимые источники входных напряжений и токов (ег, /г).
Модели на рис. 1,а описываются системой дифференциальных ур ав­
нений, записанных в нормальной форме Коши, и системой нелинейных
алгебраических уравнений:
(1)
Qdx Idt = Ах + Bu + B 'g(w );
(2)
w = А ^ + B ,u + B '^ w ) ;
где x = [uc, iL]T; u = [er, ir]T; g(w ) = [e3, i3]T— векторы переменных состоя­
ния, внешних воздействий и зависимых источников, характеризующих
нелинейные зависимости: w — вектор аргументов, от которых зависят еэ
и i3; Q, А, В, В ', А ь В,, B 'i — матрицы постоянных коэффициентов, т —
знак транспонирования.
Нелинейный
резистивный
резистивный
многополюсник
б)
Рис. 1. Универсальные нелинейные модели
в базисе переменных состояния (а) и базисе узловых напряжений (б)
При формировании уравнений используется матрица инциденций и
матрица сечений хорд графа.
К д о с т о и н с т в у модели следует отнести:
=> наличие разработанных и давно используемых алгоритмов и про­
грамм формирования уравнений;
=> простоту решения дифференциальных уравнений явными методами
численного интегрирования.
Недостатки:
=> трудности при описании цепей, имеющих топологические вырожде­
ния (контуры из источников напряжения и емкостей и звезды из ин­
дуктивностей и источников тока);
=> использование явн ы х методов интегрирования создает проблемы
выбора ш ага интегрирования при расчете цепей с большим разбро­
сом постоянных времени; модель ориентирована на схемы замещ е­
ния с дискретными R, L, С элементами, а не с распределенными
параметрами;
=> зависимость объема вычислений от порядка и разветвленности ли­
нейной части исследуемой цепи.
УН М в базисе узл о вы х напряжений. Для этой модели в качестве не­
зависимых переменных используются напряжения во внутренних узлах
схемы относительно некоторого опорного узла, потенциал которого при­
нят равным нулю. Модель можно представить в виде схемы рис. 1,6.
В основе метода узловых потенциалов лежит первый закон Кирхгофа,
утверждающий, что сум м а токов, втекающих и вытекающих из узла
(3)
i(u) = О,
где i = (ib ..., iNf , u = (мь ..., uN)J — векторы соответственно узловых то­
ков и потенциалов в схеме, содержащей N внутренних узлов. При этом
г. =
, т.е. каждый /-й ток, входящий в вектор i, равен сумме токов
*=i
всех rij ветвей, связанных с j -м узлом.
Эта модель позволяет свести интегро-дифференциальные уравнения
цепи к системе нелинейных алгебраических уравнений и, используя м е­
тод Ньютона
(4)
где
— матрица Якоби на т -й итерации, определить узловые
напряжения на (т+ 1)-й итерации (и+1)-го шага интегрирования.
Таким образом, алгоритм формирования модели сводится к составле­
нию матрицы полных узловых проводимостей (матрицы Якоби) и векто­
ра узловы х токов.
Д о с т о и н с т в а модели по сравнению с У НМ по методу пере­
менных состояний:
=> отсутствие топологических вырождений, поскольку совокупность
узловы х напряжений образует невырожденный базис. Поэтому урав­
нения относительно узловых напряжений оказываются линейно неза­
висимыми;
=> матрицы узловых проводимостей и токов формируются путем сумми­
рования токов ветвей в узлах, что упрощает автоматизацию составле­
ния уравнений;
=> использование неявных алгоритмов численного интегрирования позволя­
ет избежать сложностей, вызванных разбросом постоянных времени;
=> возможность использования для анализа цепи как с сосредоточенны­
ми, т а к и с распределенными параметрами.
Недостатки:
=> необходимость представления всех уравнений в виде зависимости i = Ди),
обусловленная использованием однородного базиса;
=> сущ ественная зависимость объема вычислений от порядка и разветв­
ленное™ линейной части исследуемой цепи.
М одель с базисными величинами нелинейных элементов. В ка­
честве базисных величин (неизвестных) этой модели используются то­
ки, протекающие через нелинейные элементы или напряжения на них
(рис. 2).
Исходную схему с помощью эквивалентных преобразований пред­
ставляю т в виде обобщенной нелинейной модели (ОНМ), состоящей из
каскадно соединенных инерционного (комплексного) линейного и безы­
нерционного (резистивного) нелинейного 2^У-полюсников (N — число
искомых неизвестных). Между 2Л'-полюсниками включены пересчитан­
ные с помощью теоремы об эквивалентном генераторе источники вход­
ного напряжения (рис. 2,а). Модель описывается системой дифференци­
альных уравнений
(6)
В(/?)ег- D(p) i = u,
где е ,(0 = [ег1, ..., ег//]т, i(?) = [/,, ..., /,v] r, u(/) = [мь ..., мл-]т — матрицыстолбцы соответственно ЭДС Н источников входного напряжения; N то­
ков, протекающих через зажимы нелинейного многополюсника, и напря­
жений на них; р = d/dt — оператор дифференцирования; В(/?), D(p) —
матрицы, при этом i и и связаны нелинейной алгебраической или транс­
цендентной зависимостью
(7)
i = V(u).
а)
б)
Рис. 2. Универсальная нелинейная модель с базисными величинами нелинейных
элементов: исходная схема (а); обобщенная нелинейная модель (б)
Построение ОНМ заключается в объединении отдельных (парциаль­
ных) многополюсников, описывающих узлы схемы в один общий ком­
плексный линейный 2(Н + Л^-полюсник. Внешними заж имами многопо­
люсника являю тся 2Н входов, предназначенных для подключения источ­
ников входного напряжения, и 2N выходов для подключения нелинейных
элементов (рис. 2,6). Связь м еж ду токами и напряжениями в схеме можно
описать следующей системой уравнений:
м п (р) м 12ы ег(0П М О
М 21(р ) м 22(Р) КО
4(0
Из (6) и (8) следует, что М 21(р) = В(р) и М 22(р)= -DO7)Известно достаточно много алгоритмов и программ д л я ЭВМ , позво­
ляющих формировать матрицу суммарного линейного многополюсника
на основе матриц объединяемых многополюсников [1].
Д о с т о и н с т в а модели:
=> число нелинейных дифференциальных уравнений порядка выше пер­
вого, входящих в систему, не зависит от структуры линейной части
схемы ;
=> практическое исключение зависимости сложности анализа от струк­
туры линейной части цепи и простая возможность включения в мо­
дель компонентов, заданных рассчитанными или экспериментально
измеренными табличными зависимостями, без представления их в ви­
де эквивалентных схем.
Вместе с тем следует указать на сравнительно малый опыт по приме­
нению этой модели.
УН М на основе ф ункциональных рядов. Линейные цепи полностью
характеризуются реакцией y(t) на воздействие в виде единичной им­
пульсной функции 8(/) при нулевых начальных условиях, что отражается
формулой интеграла наложения
о
где h (?) — импульсная характеристика цепи; x(t) — произвольное воз­
действие.
Для нелинейных цепей такую же явную зависимость выходного сигна­
ла y{t) от входного воздействия x(t) позволяет задать функциональный
ряд Вольтерра:
о
“ Г'. '
оо
*
где А*(Ть т2,..., т*) — многомерные функции, называемые ядрами Воль­
терра к-то порядка, к = 1 ,2 ,.... Эти ядра не зависят от внешних воздейст­
вий и полностью определяются свойствами самой цепи. Они обращаются
в нуль, если хотя бы одна из переменных т ь ..., т* отрицательна. Ядра
являю тся симметричными, т.е. перемена местами любых двух перемен­
ных хт и т„ не меняет значения ядра.
В выражении (9) y\(t) представляет собой реакцию линейной сис­
тем ы на входной сигнал x(t). Аналогично составляю щ ие уг(?), y 3(t),...
можно рассматривать как реакции нелинейной цепи с квадратичной,
кубической и т.д. характеристиками. Схемное представление модели
приведено на рис. 3.
Применив многомерное преобразование Лапласа к (9), можно полу­
чить ряд Вольтерра в области изображений
п
Y{sx,s2,...,sn) = ^ ” '
к
'Ч В Д ,
где H(sh i 2,—, sk) — изображение ядра к-го порядка.
Рис. 3. Универсальная нелинейная модель на основе
функциональных рядов
У ниверсальную модель в виде ряда Вольтерра можно сформиро­
вать либо для каж дого парциального двухполю сного и многополю с­
ного нелинейного элемента с последующим подсоединением к ли­
нейной части модели, либо для всей нелинейной системы (п утем на­
хождения ядер В ольтерра).
Д о с т о и н с т в а модели:
=> явная связь отклика и воздействия;
=> одновременный учет инерционных и нелинейных свойств моделируе­
мого устройства;
=> возможность простого разделения нелинейных продуктов различных
порядков за счет блочного представления преобразования входного
сигнала.
Недостатки:
=> резкое усложнение всех расчетов и преобразований по мере увеличе­
ния порядка к рассчитываемого ядра;
=> плохая сходимость ряда Вольтерра при увеличении степени нелиней­
ности цепи или амплитуды входного воздействия;
=> громоздкость многомерного преобразования Лапласа.
Поэтому в настоящее время в основном применяют полиномы Воль­
терра с 3— 5 членами, где указанные недостатки проявляются мало. При
этом требуемой точности получаемых результатов можно достигнуть
только при анализе цепей с малой степенью нелинейности.
О соответстви и моделей нелинейных элементов и цепей. При
проведении многовариантного анализа или решении задач оптими­
зации в кач естве модели нелинейных элементов (НЭ) использую т
схему замещения. В этом случае она должна быть согласована с
УНМ [1]:
=> при формировании УНМ относительно переменных состояния схема
замещения НЭ должна содержать удобно и просто разделимые безы­
нерционные и инерционные части;
=> для УНМ, использующей в качестве искомых величин токи (напря­
жения) на НЭ, модель НЭ целесообразно представить в виде много­
полюсника с разделенными линейной и нелинейной частями;
=> при построении УНМ на основе метода узловых потенциалов мо­
дели НЭ целесообразно укрупнять до многополюсников, в качестве
полюсов которых выступают выходные зажимы моделируемых
приборов;
=> при построении УНМ на основе рядов Вольтерра модели НЭ целесо­
образно представлять в виде многополюсников соответствующего по­
рядка, на полюсах которых действуют векторы токов или напряжений
этого же порядка.
Эффективность применения той или иной модели зависит от особен­
ностей проектируемого устройства. В составе САПР целесообразно
иметь все четыре типа моделей. В тех случаях, когда число реактивных
элементов сравнительно невелико, а нелинейных элементов достаточно
много, наименьший порядок системы уравнений будет иметь УНМ в ба­
зисе переменных состояния либо узловых потенциалов. В тех же случаях,
когда устройство содержит большое число реактивных и сравнительно
небольшое число нелинейных элементов (например, широкополосные
устройства, содержащие сложные селективные, формирующие и согла­
сующие цепи), наименьший порядок системы уравнений соответствует
обобщенной нелинейной модели.
8. М Е Т О Д Ы И С С Л Е Д О В А Н И Я Н Е Л И Н Е Й Н Ы Х
ЦЕПЕЙ
8 .1 . О б щ и е с в е д е н и я
Об особенностях и трудностях анализа нелинейных цепей. Для линей­
ных электрических цепей справедлив принцип наложения, благодаря ко­
торому они полностью характеризуются реакцией цепи на воздействие в
виде импульсной функции 8(?) при нулевых начальных условиях. Доста­
точно располагать импульсной характеристикой цепи h(t) (которую мож­
но снять экспериментально), чтобы судить о ее поведении при произ­
вольной форме воздействия. Наличие хотя бы одного нелинейного эле­
мента в цепи резко усложняет ситуацию. В этом случае динамическая
цепь описывается нелинейным дифференциальным уравнением или сис­
темой уравнений, для которых отсутствуют общие аналитические методы
решения. Точное решение уравнений в аналитической форме удается
получить только в простейших частных случаях для специально подоб­
ранных характеристик нелинейных элементов. Наличие двух типов ак­
тивных и двух типов каждого из реактивных элементов служит дополни­
тельным препятствием на пути создания общих методов анализа нели­
нейных цепей. В то же время нелинейные цепи (по сравнению с линей­
ными) обладают весьма широкими функциональными возможностями,
позволяя выполнять такие функции, как генерирование колебаний раз­
личной формы, преобразование частоты, модуляцию, детектирование,
импульсные преобразования и многие другие. Отсутствие общих анали­
тических методов анализа цепей (несмотря на большой практический
интерес) затрудняет выявление их свойств и характеристик.
Таким образом, трудности решения задачи анализа нелинейных электри­
ческих цепей связаны с отсутствием общих аналитических методов реше­
ния нелинейных дифференциальных уравнений и возможности выделить
простое общее свойство цепей, на основе которого можно было бы разрабо­
тать общий метод анализа [24]. Поэтому для анализа нелинейных цепей раз­
работай широкий арсенал методов анализа, каждый из которых в отдельно­
сти обладает своими достоинствами и недостатками и имеет собственную
область применения.
К лассификация методов анализа. Широкое многообразие методов
анализа нелинейных цепей затрудняет их классификацию. Поэтому вы­
делим лишь основные классификационные признаки, чтобы на основа­
нии краткого обзора и рассмотрения некоторых из методов дать общее
представление о проблемах анализа нелинейных цепей.
П о н а з н а ч е н и ю методы анализа нелинейных цепей можно
разделить на методы, предназначенные для анализа:
=> резистивных цепей. Выделение в самостоятельный класс и отдельное
рассмотрение резистивных цепей можно объяснить следующими со­
ображениями:
• необходимостью проведения анализа электронной цепи на посто­
янном токе с целью выбора рабочей точки, или статического ре­
жима работы в отсутствиек воздействующего колебания. Такой
анализ автоматически выполняется компьютерными средствами
схемотехнического моделирования перед временным анализом
(расчетом переходных процессов);
• уравнения динамических цепей часто составляются с явным выделе­
нием резистивной подцепи (метод переменных состояния). В этом
случае задача анализа при использовании численного алгоритма ее
решения сводится на каждом шаге итерации к задаче анализа рези­
стивной подцепи, что значительно проще, так как резистивные цепи
описываются функциональными (алгебраическими или трансцен­
дентными) уравнениями.
Методы анализа нелинейных резистивных цепей в дальнейшем не рас­
сматриваются, поскольку им посвящены отдельные разделы в учебниках
по теории нелинейных цепей [5, 12,23]. В параграфе 8.2 приведено краткое
изложение численных методов решения функциональных уравнений;
=> динамических цепей, которым, по сути дела, и посвящено дальнейшее
изложение.
С точки зрения ц е л и а н а л и з а методы можно подразделить на
две группы:
=> методы качественного анализа, цель которого состоит в том, чтобы,
не решая уравнений, выявить наиболее важные характерные черты
процессов в цепи и влияние на них параметров и характеристик эле­
ментов. Например, при анализе автогенератора (автономной цепи)
представляет интерес выявить условия появления незатухающих ко­
лебаний, определить состояния равновесия, их устойчивость, устано­
вить влияние начальных условий на характер процессов. К качествен­
ным методам относятся широко распространенные в теории колеба­
ний методы фазовой плоскости (фазового пространства), построения
траекторий решения уравнений в пространстве состояний и др.;
=> приближенные методы количественного анализа, которые дают реше­
ния уравнений для заданных в численном виде конкретных значений
элементов и их характеристик. К ним, например, относятся:
• численные методы (см. п. 8.3), использующие алгоритмы прибли­
женного численного интегрирования дифференциальных уравне­
ний, которые сводят решение уравнений к конечному числу ариф­
метических операций. Численные методы реализуются с помощью
современных вычислительных средств и применимы к системам
уравнений, имеющим единственное решение;
• кусочно-линейный метод, или метод кусочно-линейной аппроксима­
ции, основанный на замене нелинейных характеристик кусочно­
линейными функциями. Благодаря линеаризации цепи на отдель­
ных участках характеристики при анализе можно использовать ме­
тоды теории линейных цепей. Для каждого отдельного участка
отыскивается решение. Найденные решения сшивают (или, как го­
ворят, припасовывают), получая общее решение для исследуемой
цепи. Этот метод анализа весьма эффективен и применяется для
широкого класса нелинейных цепей.
По с п о с о б у
представления
воздействий
и
о т к л и к о в различают:
=> частотные методы анализа, к которым можно отнести модификацию
метода комплексной переменной для нелинейных цепей, метод гар­
монического баланса, метод линеаризации и др.;
=> временные методы анализа, базирующиеся на непосредственном ре­
шении дифференциальных уравнений.
П о и с с л е д у е м о м у р е ж и м у работы следует выделить:
=> методы анализа переходного процесса (режима). Эта группа объеди­
няет методы, отличающиеся способами представления и решения
дифференциальных уравнений цепи;
=> методы анализа установившегося процесса (стационарного режима).
Эту группу методов можно разделить на две подгруппы:
• методы, основанные на переходе от системы дифференциальных
уравнений, описывающих исследуемое устройство, к системе алгеб­
раических или трансцендентных уравнений с последующим ее реше­
нием каким-либо из известных численных методов (см. п. 8.4);
• методы, основанные на использовании функциональных рядов
(см. п. 8.7).
По области
п р и л о ж е н и й (практического применения)
можно выделить:
=> методы теории цепей, которые появились и разрабатывались приме­
нительно к нелинейным цепям;
=> методы теории колебаний, которые появились в результате исследо­
вания колебаний и периодических движений (см. п. 8.6);
=> методы теории нелинейных систем и др.
По с т е п е н и а н а л и т и ч н о с т и м е т о д а анализа.
Этот классификационный признак предложен в [24]. Он отражает сте­
пень полноты априорной информации об анализируемой цепи, которая
определяет возможность вывода тех или иных аналитических соотноше­
ний, составляющих концепцию метода. Между количеством априорной
информации об анализируемой цепи и степенью аналитичности метода
анализа существует взаимосвязь. Увеличение априорной информации
ведет к сужению класса анализируемых цепей, увеличению аналитично­
сти метода и повышению эффективности анализа. В соответствии с этим
признаком методы анализа условно разделены:
=> на методы численного интегрирования дифференциальных уравнений (см.
п. 8.3), которые используются на первом этапе анализа нелинейной цепи.
Результатом анализа является найденный отклик исследуемой цепи как
функции времени. На втором этапе выполняется расчет необходимых ком­
понентов спектра установившегося процесса, т. е. определение амплитуд и
фаз тех частотных компонентов, которые определяют параметры анализи­
руемого устройства. Метод требует минимальной априорной информации
о цепи и позволяет решить задачу анализа при различных уровнях и форме
входного воздействия. Его недостаток: анализ стационарного режима
требует временных затрат на расчет переходного процесса;
=> на аналитико-численные методы, концепции которых строятся на
основании некоторой априорной информации об анализируемой цепи.
Эти методы оказываются более эффективными, поскольку аналитиче­
ские соотношения, положенные в их основу, учитывают специфику
цепи. К группе аналитико-численных методов отнесены поисковые
методы, метод гармонического баланса и проекционные методы:
• поисковые методы (см. п. 8.4), сущность которых заключается в
нахождении начальных условий для установившегося режима на
основании известных свойств цепи, чтобы избежать предваритель­
ного расчета переходного процесса;
• метод гармонического баланса (см. п. 8.4). Он строится на пред­
положении, что искомую переменную (ток или напряжение) мож­
но представить в виде усеченного ряда Фурье с неизвестными ам­
плитудами. После подстановки усеченного ряда в дифференциаль­
ные уравнения переходят к более простой (алгебраической) систе­
ме уравнений, которую решают методом неопределенных коэффи­
циентов (приравниваются коэффициенты, содержащие sin кш и
cos кш с одинаковыми значениями к в левой и правой частях). Не­
достаток метода — при увеличении числа членов ряда Фурье резко
возрастают сложность анализа и временные затраты;
• проекционные (вариационные) методы, которые используются для
анализа цепей при большом уровне воздействия. Сущность мето­
дов: аналогично методу гармонического баланса решение пред­
ставляется в виде укороченного ряда Фурье с неизвестными коэф­
фициентами (амплитудами). Анализ представляет собой итераци­
онную процедуру, на каждом шаге которой определяются тем или
иным способом неизвестные коэффициенты и строится вектор не­
вязки, зависящий от них как от параметров. Коэффициенты опре­
деляются в результате минимизации невязки, для вычисления ко­
торой можно использовать быстрое преобразование Фурье. Про­
цедурно проекционные методы сводятся к тем же математическим
операциям, что и методы гармонического баланса;
• на аналитические методы с использованием функциональных ря­
дов Вольтерра (см. п. 8.7.). Априорно предполагается существова­
ние решения системы уравнений цепи в виде ряда Вольтерра, что
накладывает достаточно жесткие ограничения на нелинейную цепь
(уровень сигналов, степень нелинейности). Вместе с тем использу­
ется аналитическое представление операторов, связывающих
входное воздействие с искомым откликом цепи.
Дальнейшее изложение посвящено некоторым методам анализа. В п. 8.5
рассмотрен метод синтеза кратных преобразователей частоты по энергети­
ческим критериям.
8 .2 . Ч и с л е н н ы е м етод ы р е ш е н и я а л ге б р а и ч е с к и х
уравнений
В исходную математическую модель нелинейной цепи могут входить
линейные и нелинейные алгебраические уравнения. Рассмотрим особен­
ности их решения.
Л инейны е уравнения. В программах автоматизации схемотехниче­
ского моделирования (ACM) решение системы линейных уравнений
(1)
Ах = Ь,
где А — квадратная матрица, b — вектор, является не только самостоя­
тельной задачей, но и служит одной из наиболее часто повторяющихся
процедур при решении других, более сложных функциональных задач,
например при решении систем нелинейных уравнений.
В большинстве случаев для решения системы (1) на ЭВМ используются
прямые методы, обеспечивающие решение за конечное число операций.
П р я м ы е м е т о д ы решения (1) можно разделить на три группы [15]:
=> методы предварительного разложения матрицы А на сомножители;
=> методы обращения матрицы, когда решение системы (1) отыскивается
в виде х = A 'b, при этом обращение матрицы может быть выполнено
с использованием методов первой группы;
=> методы решения (1) с матрицей А специального вида, например, лен­
точного диагонального вида, который имеют схемы с цепочной (кас­
кадной) структурой без обратных связей.
В программах ACM часто применяют методы первой группы, среди ко­
торых широкое распространение получил метод прямого LU-разложения.
Суть метода состоит в представлении исходной матрицы в виде произведе­
ния матриц A = LU, после чего система (1) решается последовательно как
две подсистемы:
Ly = b; Ux = у,
где L , U — нижняя и верхняя треугольные матрицы соответственно.
Процесс разложения состоит из однотипных шагов и реализуется по
известным алгоритмам.
Следует выделить д в е
проблемы,
возникающие
п р и р е ш е н и и (1):
=> сохранение высокой степени разреженности матрицы А в процессе
решения. Количество ненулевых элементов в каждой строке исходной
системы уравнений может составлять единицы и доли процента от об­
щего числа элементов матрицы А. В процессе решения (1) матрица А
преобразуется, например раскладывается на треугольные сомножители.
При этом на месте нулевых элементов появляются новые ненулевые,
что ведет к дополнительным затратам времени решения и памяти;
=> сохранение точности на уровне ошибок округления исходных данных.
Из-за конечности разрядной сетки при решении (1) неизбежны ошиб­
ки вследствие округления промежуточных результатов. Эти ошибки в
процессе решения могут быстро возрастать, что приведет к потере
точности результата.
Специфика решения системы (1) состоит в необходимости высокой
точности решения и одновременно сохранения разреженности матрицы
А. Машинные алгоритмы различаются методом упаковки ненулевых эле­
ментов и критериями упорядочения для разреженности и точности.
Метод
упаковки
ненулевых
э л е м е н т о в отра­
жает способ хранения матрицы А в виде списков. Список представляет
собой одномерный массив, содержащий информацию о значении ненуле­
вых элементов матрицы А, их номерах строк и столбцов. Методы упа­
ковки разделяются:
=> на универсальные методы, пригодные для матриц любого вида. Они
основаны на замене двумерного массива (матрицы А) одним или не­
сколькими одномерными массивами (списками). По содержанию раз­
личают:
• списки значений ненулевых элементов;
• списки позиционных указателей, содержащие номера строк
(столбцов) ненулевых элементов;
• списки разделителей. Разделители позволяют выделять и отдель­
ные группы ненулевые элементы, находящиеся в одной строке
или столбце. В качестве разделителей можно использовать число
ненулевых элементов в строке (столбце), порядковые номера
первых или последних ненулевых элементов в строке (столбце)
матрицы А;
=> на специальные методы, учитывающие структуру заполнения матрицы
ненулевыми элементами. Они ориентированы на определенную
структуру матрицы А.
Критерий
упорядочения
для
разреженно­
с т и определяет порядок обработки уравнений в системе (1), при кото­
ром число новых ненулевых элементов матрицы А будет минимальным.
Основными характеристиками этих критериев являются:
=> длина просмотра— количество уравнений, анализируемых для одно­
кратного применения критерия;
=> глубина просмотра — количество шагов разложения, необходимых
для однократного применения критерия;
=> ширина просмотра — количество различных анализируемых порядков
разложения на h шагах, необходимое для однократного применения
критерия;
=> мощность критерия — количество уравнений в последовательности
разложения, определяемое при однократном применении критерия.
Пример критерия: i <j, если число исходных (до разложения) ненуле­
вых элементов г-й строки матрицы меньше числа исходных ненулевых
элементов j- й строки.
Критерий упорядочения применяется на каждом шаге разложения, в
результате чего определяется номер уравнения (строки матрицы А), об­
работка которого дает минимальное число новых ненулевых элементов.
Применение критерия на каждом из п шагов дает последовательность
номеров уравнений, следуя которой при разложении матрицы А получа­
ем число новых ненулевых элементов, близкое к минимально воз­
можному. На рис. 1 показана типовая структура матрицы А после упоря­
дочения и структуры L- и U-матриц после LU-разложения.
Структуры матриц
после LU-разложения
Рис. 1. Структуры L и U-матриц после LU-разложения
и типовая структура матрицы А после упорядочения
К р и т е р и и у п о р я д о ч е н и я д л я т о ч н о с т и . Ошибка
в вычислении коэффициента а,у матрицы А в процессе решения системы (1)
может быстро возрастать, приводя к большим ошибкам результата. В связи
с этим вычислительный процесс при решении (1) нужно строить с учетом
требований минимизации ошибок на каждом шаге решения. Для уменьше-
ния ошибок применяют метод главных элементов. Главный элемент — это
элемент матрицы, на который делится результат на очередном шаге пря­
мого хода решения системы (1). Операция деления на максимальный глав­
ный элемент дает минимальную ошибку округления, поэтому на каждом
шаге прямого хода предпочтение отдается строке (паре столбец — строка)
с максимальным значением диагонального элемента.
О к о н ф л и к т а х м е ж д у к р и т е р и я м и . Критерии упо­
рядочения для разреженности и точности могут приводить к разным
последовательностям обработки уравнений. Для разрешения конфликтов
между ними устанавливается допустимое минимальное значение £ диа­
гонального элемента а„ (г = 1,..., п). Если все а„ больше е, то работает кри­
терий упорядочения для разреженности, если для некоторых ац это пра­
вило не выполняется, то приоритет отдается критерию упорядочения по
точности и строка с минимальным значением аи обрабатывается в по­
следнюю очередь. Реализация этого правила требует переупорядочения
уравнений по различным критериям.
Ф ункциональны е уравнения. К ним относят алгебраические и
трансцендентные уравнениями, которыми описываются нелинейные ре­
зистивные цепи. При использовании численных методов для решения
функциональных уравнений сначала делают грубую оценку корней (на­
чальное приближение), а затем производят уточнение их значений на
основе принятого алгоритма до получения требуемой точности. Выбор
начального приближения определяется требованиями обеспечения схо­
димости и осуществляется программными средствами.
Для понимания сути численных алгоритмов рассмотрим два метода.
Метод
простых
и т е р а ц и й . С помощью этого метода
отыскивается приближенное решение уравнения, представленного в виде
(2)
х = F(x),
по алгоритму
(3)
хм = Fx(xk).
Принимая в (3) к = 0, для начального приближения х0 вычисляют х\.
Затем, используя jci при к = 1, определяют х2 и т.д. Вычисления продол­
жают до тех пор, пока разность хк+\ - хк не станет меньше некоторого за­
данного значения. На рис. 2,а в графической форме иллюстрируется реа­
лизация алгоритма итераций. Линиями со стрелками показан путь дви­
жения от начального значения х() к точному значению х* корня уравнения
(2), который расположен в точке пересечения функций F(x) и х.
Рис. 2. Иллюстрация численных методов решения нелинейных уравнений:
метод простых итераций (а); метод Ньютона — Рафсона (б)
Метод
Н ь ю т о н а — Р а ф с о н а . С помощью этого метода
уточняется корень нелинейного уравнения
(4)
F(x) = 0.
Вывод итерационной формулы базируется на представлении функции
F(x) двумя членами ряда Тейлора:
(5)
F(xM ) = F(xk) + F \xk) (% , - хк),
где хк — значение корня уравнения (3) на к-и шаге; хк+\ — уточненное
значение корня; F \x k) — производная F(x) при х = х^\.
Если допустить, что при полученном уточненном значении x*+i корня
уравнение (4) обращается в нуль, т. е. F(xk+i) = 0, то из выражения (5) по­
лучаем итерационную формулу (алгоритм)
(6)
х*+| = x k - F ( x k) / F ' ( x k)
Графическая иллюстрация алгоритма Ньютона — Рафсона приведена
на рис. 2,6. В каждой точке хк (к = 0, 1, 2 ,...) проводится касательная к
функции F(x). Ее пересечение с осью х дает новое уточненное значение
корня **+,. Так как производная F'(xk) представляет собой отношение ка­
тетов F(xk) и хк+] —хк треугольника (показан штриховкой), графические
построения соответствуют алгоритму (6). По стрелкам на рис. 2,6 можно
проследить путь от хк к точному решению jc*.
Для системы двух уравнений F„(xь х2) = 0 (п = 1, 2) вместо (5) имеем
Fn (*и+1 >*2,*+1 ) ~ Рп(*|.* >*2,* ) +
, dFn(ххк, х 2к) t
Л
° Х п.к
(^i.* ’ Xl-k) i
Х \,к ) "*"
т
ОХпк
(* 2.*+ 1
\
_ 1.л
Х 2.к )> И — 1» 2 .
Полагая, что при уточненных значениях
Fn(x\.k+ь *2, ж ) = 0, получим систему уравнений
dF„ (*,.*, х и )
3
корней
уравнение
dFn(хи , х 2к)
(* U + 1
Х \,к)~*~
° Х п,к
( Х 2.к+1
^
Х 2 .к )
Х п.к
= ~FA x ik ’x 2.kl п = \\2,
для определения Х\.к+\ и х2.ь-\Перепишем эти уравнения в матричной форме, обобщив на произ­
вольное число п уравнений системы:
J(x*)( x*+l-x*) = -f(x*),
где хн , \ к— «-мерные векторы; J(x*) — матрица Якоби от F(x) в точке х = х*.
Решение этой системы относительно х*.i можно представить в виде
итерационной формулы
хж = \ к - [ J M r 1 f(x*).
(7)
О
сходимости
а л г о р и т м о в . Для сходимости алгоритма
простых итераций достаточно, чтобы в окрестности точного решения х*
± Хо модуль производной правой части (1) не превышал единицы: \F'(xk)\ <
1. Следовательно, угол а наклона касательной к функции F(x) на интер­
вале х* ± х0 не должен превосходить 45° (рис. 3 ,а). При а = 45° алгоритм
зацикливается (рис. 3,6), при а > 45° — расходится (рис. 3,в).
Алгоритм сходится
а)
Алгоритм зациклен
Алгоритм расходится
б)
в)
Рис. 3. Иллюстрация сходимости — расходимости алгоритма простых итераций
Метод Ньютона (7) имеет малый размер области сходимости и тре­
бует задания начального значения х<0), близкого к точке решения х . В
отличие от простых итераций с линейной скоростью сходимости метод
Ньютона обеспечивает квадратичную (более высокую) скорость сходи­
мости и поэтому эффективен, если Г(х) является выпуклой функцией.
8 .3 . Ч и с л е н н ы е м ето д ы и н т е гр и р о в а н и я
диф ф еренциальны х уравнений
Простейшие алгоритмы численного интегрирования. Идеи численных ме­
тодов проиллюстрируем на примере интегрирования уравнения первое порядка
(О
x '= ^ - = f( x , t),
at
где х, t — зависимая и независимая переменные; fix, t) — известная (ли­
нейная или нелинейная) функция.
Эти идеи можно перенести на системы уравнений первого порядка и
обобщить на случай уравнений высших порядков.
Уравнению (1) на интервале t$...t\ соответствует интеграл (отсюда по­
нятие интегрирование дифференциального уравнения)
(2)
‘\
x{tx) = x(t0) + J /( x , t)d t.
'0
Допустим, что:
=> начальное значение x(t0) = х0 известно;
=> функция fix, t) на интервале
изменяется незначительно.
В этом случае интеграл (2) с учетом (1) может быть представлен в
следующих двух формах, известных соответственно как прямая (явная) и
обратная (неявная) формулы Эйлера [8]:
(3)
x x = x0+ hf(x0,t 0) = x0+hx'0;
(4)
xl = x0+ hf(xl,t l) = x0+ hx\,
где Х\ ~ x(/i); h = tx- f0; x'0, x \ — значение производных искомой функции
x(t) при /0 и /,(1).
С помощью рис. 1 можно дать геометрическую трактовку соотношениям
(3) и (4). При получении прямой формулы Эйлера (3) искомая функция x{t)
аппроксимируется на интервале (шаге) интегрирования прямой линией, сов­
падающей с касательной к этой функции в точке х() = х(/(|) (рис. 1,а), а при
получении обратной формулы Эйлера (4) — касательной в точке х(/|), выхо­
дящей из точки х0 = х(/0) (рис. 1,6). В обоих случаях значение искомой функ­
ции x(t) определяется с некоторой ошибкой е = х(/,) - х х.
Представив (3) в виде соотношения (х, - x0)/h = х'0, а (4) — в виде со­
отношения (х, - x0)/h = х'| и используя линейную комбинацию производ­
ных Ьох'о + Ь\х\ = {х\ - x 0)/h, можно получить при Ь0 = Ь, = 1/2 известную
формулу трапеций
(5)
г, = х0 +А/2 (х'о + x'i).
Прямая формула Эйлера
Обратная формула Эйлера
Рис. 1. Геометрическая трактовка прямой (а) и обратной (б) формулы Эйлера
При численном интегрировании промежуток времени t0...tm, в преде­
лах которого требуется получить решение x(t) уравнения (1), разбивают
на малые интервалы времени At = h, называемые шагом интегрирования.
Полагают, что начальное значение х(/0) = х0 известно и решение, притом
единственное, существует на всем интересующем интервале времени.
Соотношения (3)-(5) записывают в форме алгоритма
(7)
хк+, = хк + hx\ = xk + h f(xk, t k);
хк+] = хк + hx'M = xk + hf (xk+l, t k+]);
(8 )
X k+\
(6)
h
=
X k ~^~2
h
* ~^ X
k + \^ =
X k
\ - f i X k
>h )
f ( X k
+1>^*+1 )] ’
позволяющего последовательно (задаваясь к = О, 1, 2,...) вычислить зна­
чения х\, х2, х3,... от начальной расчетной точки t\ до конечной tm с шагом
h. Результаты численного интегрирования представляют собой таблицу
соответствующих значений t„ и х„ (п = 0, 1, 2, 3,...).
Алгоритм (6), позволяющий непосредственно определить решение x*+i
в следующей точке 4+ь называется явным алгоритмом. В неявных алгорит­
мах Эйлера (7) и трапеций (8) используется производная в следующей точке
(4 ,!), значение которой неизвестно. Возникает задача определения ее при­
ближенного значения, или предсказания. Одна из возможностей ее решения
состоит в применении на каждом шаге прямой формулы Эйлера (6). На ос­
нове найденного предсказания можно рассчитать значение производной х'
из (1) и использовать его при коррекции, которую можно выполнить по не­
явным формулам (7), (8). Повторным расчетом по формуле коррекции мож­
но уточнить рассогласование начальных значений х и х'. Хотя непосредст­
венная необходимость в таких повторных расчетах отсутствует, в результате
нескольких итераций (как показано в приведенных ниже примерах) можно
получить более точное значение х„. Итерации желательны, поскольку вы­
полняются сравнительно просто. Кроме того, коррекция помогает в фикса­
ции ошибок и управлении размером шага А.
Примеры. Для иллюстрации алгоритмов численного интегрирования
решим неоднородное линейное дифференциальное уравнение х' = х + t2,
приняв шаг интегрирования А = 0,025; x(l0) = х0 = 1 (to = 0). Для оценки
погрешности численного интегрирования (решения) воспользуемся точ­
ным решением дифференциального уравнения, имеющим следующий
вид: х = Зе‘ - ? - 2t - 2. Погрешность е определим как разность точного и
полученного (численного) результатов.
- Я в н ы й а л г о р и т м Э й л е р а : хк+1 = хк + h(xk + tk2).
Ш аг 1 (к = 0): х, = х0 + h(x0 + t02) = 1 + 0,025(1 + О2) = 1,025.
Шаг 2 (к = 1): х2 = х, + А(х, + t 2) = 1,025 + 0,025(1,025 + 0,0252) =
1,0506406 и т. д.
Н е я в н ы й а л г о р и т м Э й л е р а . На каждом шаге алгорит­
ма будем использовать прямую формулу Эйлера хж п = хк + h(xk + t 2) для
предсказания и обратную формулу Эйлера х ^\ - xk + h(xk+\ + tk+2) для
коррекции, используя при этом три итерации. Третья итерация является
результатом и используется на следующем шаге алгоритма.
Шаг 1 (к = 0).
Предсказание: х " = x0+h(x0 + t02) = 1 + 0,025( 1+02) = 1,025.
Итерация 1: х,(1) = х0 + h(x ,п + t 2) = 1 + 0,025(1,025 + 0,0252) =
= 1,0256406.
Итерация 2: х,(2) = ха + h (х,01-)- /,2) = 1 + 0,025(1,0256406 + 0, 0252) =
= 1,0256566.
Итерация 3: х,<3) = х0 + h (х,<2) + /,2) = 1 + 0,025(1,0256566 + 0, 0252) =
= 1 , 0256570 .
Шаг 2(k= 1).
Предсказание: х2П = х,+й(х, + t 2) = 1,0256570 + 0,025(1,0256570 +
+ 0,0252) = 1,051314.
Итерация 1: х2(1) = х, + h (х2п + /22) = 1,0256570 + 0,025(1,051314 +
+ 0,052) = 1,0520023
Итерация 2: х2(2) = х, + А (х2(1)+ t22) = 1,0256570 + 0,025(1,0520023 +
+ 0,052) = 1,0520195
Итерация 3: х2(3) = х, + А (х2<2) + t2 ) = 1,0256570 + 0,025(1,0520195 +
+ 0,052) = 1,0520199 и т. д.
Н е я в н ы й а л г о р и т м т р а п е ц и й . На каждом шаге алго­
ритма предсказания будем рассчитывать по прямой формуле Эйлера
Xk-r]" = xk + h(xk + tk2), а для коррекции — использовать три итерации по
формуле трапеций ,гн = хк + 0,5h(xk + tk + x*+i + tk+2). Третья итерация
является результатом и используется на следующем шаге алгоритма.
Ш аг 1 (к = 0).
Предсказание'. Х\п = x0+h(x0 + t02) = 1 + 0,025(1 + О2) = 1,025.
Итерация 1: х / 1*= Хо + 0,5/г(х0 + to2+ Xi" + t 2) =
= 1 + 0,5-0,025(1 + 02+ 1,025 + 0,0252) = 1,0235203.
Итерация 2: х \ 2) = хо + 0,5Л(хо + to + Xi(l> + tC) =
= 1 +0,5-0,025(1 + О2+ 1,0253203 + 0,0252)= 1,0253243.
Итерация 3: Xi(3) = х0 + 0,5/?(х0 + to' + х / 1*+ t 2) =
= 1 + 0,5-0,025(1 + 02+ 1,0253243+ 0,0252) = 1,0253244 и т.д.
Результаты расчетов сведены в табл. 1.
Приведенные примеры показывают, что:
=> абсолютная (и относительная) ошибка возрастает с каждым шагом чис­
ленного интегрирования. При этом ошибки явного и неявного алгоритма
Эйлера имеют разные знаки (см. рис. 1). Неявный алгоритм трапеций,
представляющий собой комбинацию прямой и обратной формул Эйлера,
обладает меньшей погрешностью (этому ниже будет дано объяснение);
Таблица 1
п
tn
0
1
2
3
4
0,000
0,025
0,050
0,075
0,100
п
tn
0
1
2
3
4
0,000
0,025
0,050
0,075
0,100
п
tn
0
1
2
3
4
0,000
0,025
0,050
0,075
0,100
Явный алгоритм Эйлера
х„
£
1,0000000
1,0250000
1,0506406
1,0769691
1,1040340
0,0000000
0,0003204
0,0006727
0,0010583
0,0014788
Неявный алгоритм Эйлера
хп хп
1,0000000
1,0256570
1,0520199
1,0791391
1,1070658
е
0,0000000
-0,0003367
-0,0007067
-0,0011117
-0,0015530
Неявный алгоритм трапеций
X = хЛП(3)
ЛП
Е
1,0000000
1,0253244
1,0513215
1,0780401
1,1055300
0,0000000
-0,0000040
-0,0000082
-0,0000127
-0,0000172
=> объединение явных и неявных формул приводит к методу предсказания и
коррекции. При этом коррекцию можно рассматривать как способ итера­
тивного решения в общем случае нелинейных алгебраических уравнений
(относительно хм ) на каждом шаге неявного алгоритма. Неявные алго­
ритмы более трудоемки с точки зрения вычислений, однако обладают
большей устойчивостью, о которой пойдет речь ниже.
Порядок метода интегрирования и ошибка усечения. Выявим не­
которые свойства алгоритмов численного интегрирования (6)-(8), пред­
ставив их в виде обобщенного соотношения
a xx{tk+ h) + a0x(tk) - h[b\x'(tk+ h) + b0x f {tk)} = 0,
(9)
где значения коэффициентов а ь а 0, Ь\, b0 для рассматриваемых алгорит­
мов приведены в табл. 2.
Таблица 2
Алгоритм
а\
«0
Ь\
*0
Явный алгоритм Эйлера
1
-1
0
1
Неявный алгоритм Эйлера
1
-1
1
0
Неявный алгоритм трапеций
1
-1
0,5
0,5
Разложим функции x(tk+ И) и x'(tk+ h) в ряды Тейлора:
+ a0x(tk)-h b
- b 0x'(tk) = 0.
Перепишем последнее выражение в виде ряда по возрастающим по­
рядкам производных:
(10)
[а, + а 0]*(/*)+ [<?, - 6 , - b 0]hx'(tk) +
2!
3!
2!
'
h2x"(tk ) +
h x'”(tk) H— = 0
Подставив в (10) значения коэффициентов а, из табл. 2, получим
1 2
1 з
(11)
—h~x"(tk) - —h x '" {tk) + --- = 0 — для явного алгоритма Эйлера;
(12)
~ —h~x"(tk) - —h3x”'(tk)-\— = 0 — для неявного алгоритма Эйлера;
^
О
(13)
- L / r V " ( / t ) + ■■• = 0 — для неявного алгоритма трапеций.
12
Если бы в (10) содержимое во всех квадратных скобках равнялось ну­
лю, то алгоритм (9) давал бы в точке 4 + h точное решение. Как видно из
соотношений (11)—(12), число первых слагаемых для алгоритмов Эйлера,
которое обращается в нуль, ограничено первой производной, а для алго­
ритма трапеций — второй. Это отражает тот факт, что в алгоритмах Эй­
лера искомая функция аппроксимирована линейной функцией, в алго­
ритме трапеций квадратичной функцией, или полиномом второй степени.
Поэтому говорят, что метод численного интегрирования, базирующийся
на формулах Эйлера, имеет порядок р = 1, метод трапеций — порядок р =
2. Погрешность описания искомой функции x(t) определяется неучтен­
ными членами ряда Тейлора, содержащими производные второго, третье­
го и более высоких порядков. Первый не равный нулю сомножитель в
(11)—(12) обозначим ср+1 и назовем ошибкой усечения. Для алгоритмов
Эйлера с^+ь = с2 = 11/2|, для алгоритма трапеций ср+ь = с3 = 1/12. В приве­
денных выше примерах при использовании алгоритма трапеций получе­
ны более точные результаты, чем алгоритмов Эйлера. Причина этого в
большем значении порядка р интегрирования и меньшей ошибке усече­
ния Cp+i алгоритма трапеций.
У стойчивость методов интегрирования. Помимо порядка метода
интегрирования и ошибки усечения важным свойством алгоритмов чис­
ленного интегрирования является их численная устойчивость, под кото­
рой понимают способность с ростом числа шагов сохранять в огра­
ниченных пределах локальную методическую ошибку и ошибку округле­
ния при значении шага h —» 0.
Как уже отмечалось выше, погрешность расчета численным методом
в момент tk можно оценить как разность между точным и приближенным
вычисленным значением
(14)
ek=£M,k+ e0.k = x(tk) — хь
где
£Mt — ошибка неточности самого алгоритма, называемая методиче­
ской ошибкой, или ошибкой отсечения. Эта ошибка, как было пока­
зано выше, обусловлена ограничением числа членов ряда (например,
Тейлора), заложенного в алгоритме численного интегрирования;
=z> е0к — ошибка округления, обусловленная ограниченным количеством
разрядов или конечной длиной машинного слова.
Для сравнения точности алгоритмов используют понятие локальной
ошибки (методической и округления) в пределах одного (обычно перво­
го) шага. Методическая ошибка и ошибка округления имеют тенденцию
нарастать в процессе вычисления от шага к шагу.
Для выявления численной устойчивости алгоритма используют диф­
ференциальное уравнение:
(15)
х ' = Хх,
точное решение которого имеет вид х = х(0) exp (Xt). При этом константа X
может быть действительным или комплексным числом. Для устойчивого
дифференциального уравнения Re X < 0. Оценим численную устойчивость
алгоритмов Эйлера и трапеций.
Я в н ы й а л г о р и т м Э й л е р а . Подставив в прямую формулу
Эйлера (3) производную из уравнения (15), получим
Х[ =х0+ h x '0 = x0+ hXxQ= (\ +Xh)x0.
Сделаем такую же подстановку на следующем шаге алгоритма:
х2 =Х\ + h х \ =х\ + hXxi = (1 + Xh]x{ = (1 + Xh)2x0.
Продолжив эту процедуру в пределах п шагов, найдем
х„ =(1 + X hfx0.
Чтобы результат был ограниченным при п —> °°, необходимо выпол­
нение следующего соотношения:
(16) 11 -+ /гЛ| < 1.
Для нахождения области, в которой удовлетворяется условие (16),
обозначи мИХ= q = и +jv и подставим в (16). Получим
11 -+и + jv | < 1 или (1 + и)2 + v2 < 1.
Последнее выражение описывает область устойчивости, которая лежит
внутри круга (при u = v= 1) с центром в точке (—1, 0), т.е. в круге, сдвинутом
относительно начала координат (рис. 1,а). Полученный результат можно
использовать следующим образом. При Re X < 0 выбирается шаг h так, что­
бы значение q = ИХ соответствовало точке внутри круга. В этом случае чис­
ленный метод интегрирования будет устойчив, т.е. значение функции x(t),
вычисленное на п-м шаге при п —» будет конечным.
При больших значениях |А.| длина шага должна быть малой для гаран­
тированной устойчивости.
Пример. В табл. 3 приведены результаты решения уравнения х' = —х
при х0 = 1 для трех случаев:
=> шаг интегрирования h = 0,1; значение q находится внутри области
устойчивости. Результаты численного интегрирования незначительно
отличаются от точного решения exp(-f);
шаг интегрирования h =2; значение q соответствует границе области
устойчивости. В этом случае решение осциллирует, но не нарастает,
шаг интегрирования h =3, соответствующее значению q, которое на­
ходится вне области устойчивости. Результат нарастает и осциллиру­
ет, хотя точное решение должно уменьшаться.
Таблица 3
Шаг
п
Решение
точное
при
h = 0,1
при
h=2
при
h =3
0
1
1
1
1
1
0,9048
0,9
-2
2
0,8187
0,81
3
0,7408
0,729
-1
1
-1
4
0,6703
0,6561
1
16
5
0,6065
0,5905
0,5488
-1
1
-3 2
0,5314
6
4
-8
64
Неявный алгоритм
Э й л е р а . Для этого алгоритма об­
ласть численной устойчивости описывается следующим соотношением:
1 <(1
- и ) 2
+ V2.
При и = v = 1 она лежит вне окружности единичного радиуса (рис. 2,6),
центр которой находится в точке (1,0).
Н е я в н ы й а л г о р и т м т р а п е ц и й . При п —>■°° условие ус­
тойчивости имеет вид
2 +q
2~q
< 1 или
2 + и + jv
<1
2 -u -jv
Его можно свести к неравенству и < 0, из которого следует, что границей
устойчивости является мнимая ось, а областью устойчивости является левая
полуплоскость (рис. 2,в). Отметим, что по сравнению с неявным алгоритмом
Эйлера область устойчивости уменьшилась. При этом метод интегрирования
имеет больший порядок. Следовательно, более высокий порядок р метода
может сопровождаться уменьшением устойчивости.
Другой особенностью алгоритма трапеций является то, что он дает
устойчивый отклик для устойчивых решений уравнения (15), у которых
Re X < 0, и нестабильный отклик для неустойчивых решений, у которых
Re X > 0.
Следует иметь в виду, что выполнение условий устойчивости для
численного метода не является свидетельством правильности результатов
расчета, а означает только то, что любая ошибка при вычислениях не
увеличится на последующих шагах. Один из путей обеспечения правиль­
ности результатов для выбранного размера шага состоит в использовании
алгоритмов с наивысшим порядком р. Однако более высокий порядок
метода может сопровождаться уменьшением устойчивости, как это обна­
ружилось в алгоритме трапеций.
/V
/V
; Область
/
/
Область N .
СХОДИМОСТИ
Область
\
М!.|..........
,
1
"
сходимости
а)
Рис. 2. Устойчивость методов интегрирования: явный метод Эйлера (а);
неявный метод Эйлера (б); метод трапеций (в)
Если алгоритм численного интегрирования дает ограниченное реше­
ние тестового дифференциального уравнения (15) для произвольных раз­
меров шага и любого числа шагов при Re X < 0, то его называют Аустойчивым. Неявные алгоритмы (Эйлера и трапеций) обладают этим
свойством. Область абсолютной устойчивости представляет собой
часть плоскости q = ИХ, в которой интегрирование дифференциального
уравнения (15) при Re X < 0 дает ограниченный результат для любого
числа шагов. Как было показано выше, неявный алгоритм Эйлера абсо­
лютно устойчив во всей левой полуплоскости. Большинство цепей,
встречающихся на практике, является устойчивым. Для линейной цепи
это означает, что действительные части корней характеристических
уравнений отрицательны. Поэтому для тестового уравнения (15) имеют в
виду решение при Re X < 0.
Об особенностях жестких систем. Численная устойчивость особо
важна при численном интегрировании дифференциальных уравнений,
описывающих так называемые жесткие системы, которые имеют боль­
шой разброс постоянных времени. Решения жестких уравнений состоят
из участков с очень быстрыми и очень медленными изменениями мгно­
венных значений напряжения (тока). Типичным примером жесткой сис­
темы может служить мультивибратор (см. п. 11.4), в выходных импуль­
сах которого длительности фронта и плоской части могут различаться на
несколько порядков. Если выбрать по условию устойчивости на участке
быстрого изменения шаг малым и сохранить его, то для участка медлен­
ного изменения потребуется очень большое число шагов, что связано с
напрасной тратой значительного машинного времени.
Для численного решения жестких уравнений необходимо располагать ал­
горитмами, позволяющими в широком диапазоне изменять шаг в процессе
вычислений (при переходе к участкам с другой скоростью изменения реше­
ния). При этом должна обеспечиваться численная устойчивость. Неявные
алгоритмы Эйлера и трапеций удовлетворяют требованиям, предъявляемым
к методам решения жестких уравнений, так как они устойчивы для любых X.
Поэтому можно начать с малого значения шага h и после того, как быстрые
составляющие затухнут, перейти на большее значение h.
О
других методах. Среди численных методов интегрирования диф­
ференциальных уравнений выделяют:
=> одношаговые методы, в которых значение хк+\ искомой функции на
очередном шаге (в момент tk+\) вычисляется на основе значения хк на
предыдущем шаге;
=> многошаговые методы, в которых хк+\ вычисляется по значениям, най­
денным на нескольких предыдущих шагах.
О д н о ш а г о в ы е м е т о д ы базируются на разложении искомого
решения в окрестности точки tk в ряд Тейлора и использовании формул чис­
ленного дифференцирования для вычисления производных в нескольких про­
межуточных точках шага. К ним относятся явные алгоритмы Рунге
Кутга,
простейшим из которых является рассмотренный выше алгоритм Эйлера.
В алгоритмах Рунге — Кутта вычисления производных заменяются вычисле­
ниями значений функции в нескольких промежуточных точках шага. Алго­
ритм четвертого порядка можно представить в следующем виде
h
х к+1 = хк + —(ф, + 2ф2 + 2ф3 + Ф3),
ь
где ф, — угловые коэффициенты касательных в различных точках: ф[
в начальной точке хк, tk шага; фг, Фз — в середине шага; ф4 — в конце ша­
га. Коэффициенты ф, вычисляются по следующим формулам:
Ф, = / ( * * .'* ) ;
Ф2 = Л** +hkl /2 ,tk +hl 2];
Фз = Я хк +^к 2 /2 ’ 1к + Л/2];
ф4 = f [ x k +hk3, t k +/?].
Приведенный алгоритм имеет порядок р = 4, поэтому методическая
погрешность невелика (оценивается как КИ5) и вычисления можно прово­
дить с относительно большим шагом.
В м н о г о ш а г о в ы х м е т о д а х численного интегрирования
используется информация о предыдущих точках, полученных в процессе
вычисления. К ним относятся методы Адамса — Бэшфорта и Адамса —
Мултона.
Явные алгоритмы Адамса — Бэшфорта описываются выражением:
хы = х к + А[я0( p) f ( xk, t k) + a]( p ) f ( x k
,
t k^ ) + •• •
■■■+ a p_]( p ) f ( x k^p+l, t k_p+l).
Коэффициенты a„{n = 0, 1,..., p -1 ) зависят от порядка p и определя­
ются из решения соответствующей системы уравнений. Значение р = 1
соответствует явному алгоритму Эйлера (6), а р = 3 — трехшаговому ал­
горитму третьего порядка:
Х к+\ ~ Х к +
[2 3 /(х* , tk ) —\6 f( x k_\, tk_| ) + 5 J(xk_2, tk_2 ).
Для начала вычислений необходимо располагать значениями функций
в р = 3 предыдущих точках.
Неявные алгоритмы Адамса — Мултона вычисляются по формуле:
хш = хк + h [*-i ( р ) А хм , '* +, ) + 6о(Р ) А х к > '*) + " •
■■■ + Ь р - 2 ( Р ) / ( х к - Р + 2 ’ * к - Р + г ) 1
Значения р = 1 соответствует неявному алгоритму Эйлера, р = 2 — ал­
горитму трапеций, а р = 3 — более точному двухшаговому алгоритму
Адамса — Мултона третьего порядка:
h
Х к+1 — Х к
t M ) + % f ( x k , t k ) —f { x k_t , t k_| )].
Достоинство многошаговых алгоритмов проявляется в возможности
более легкого контроля над распространением ошибки, а также в боль­
шей эффективности, поскольку функция вычисляется в двух точках, а не
в четырех, как в алгоритме Рунге — Кутта.
Ф о р м у л ы д и ф ф е р е н ц и р о в а н и я н а з а д . Линейные
многошаговые формулы, используемые при численном интегрировании
дифференциальных уравнений, получаются путем:
=> аппроксимации искомой функции интерполяционным полиномом;
=> выбора коэффициентов полинома таким образом, чтобы его значения
совпадали с найденными на предыдущих шагах значениями решения
и его производной.
Многошаговые формулы строятся по известным значениям хк+\-р,
Хк+2-р, ..., Хьл, Ахм функции x(t) И производных xV+ 1 -,» х'к+2-р, ..., х ’к1], Лх'ы в МО­
менты /м _р, 4 + 2 -р ,4 н , tM. Случай А = 0 приводит к формуле, которая назы­
вается прогнозом (предсказанием), а случай А = 1 — к формуле коррекции.
Формулы дифференцирования назад (ФДН), или обратного диффе­
ренцирования, не требуют знания производных в предшествующие мо­
менты времени. В их основе лежит представление производной х'к+\ ис­
комой функции x(t) в точке tk+1 через значение xk+i и известные значения в
р предшествующих точках xk, хк...\, ..., хк,\ р (/^-предысторию). Формулы
дифференцирования назад для прогноза и коррекции имеют вид
(17)
хм = '£ a nixk+l_j ;
У=1
(18)
х'к+1 = - ^
п j=0
а1х«+1-/ •
В явную формулу прогноза (17) входят только известные из преды­
дущих шагов значения хк, x*_i, ..., хк+\-р функции x(t). Она позволяет оп­
ределить начальное значение хк+\ для коррекции. Неявная формула (18)
коррекции после подстановки ее в исходное дифференциальное уравне­
ние х' = fix, t) позволяет итерационным методом получить более точное
значение хк+\, где i — номер итерации. Таким образом, получив один раз
прогнозируемое значение переменной хк+\, ее значение путем итераций
уточняется по формуле коррекции.
Метод численного интегрирования с использованием ФДН (17), (18)
называется методом p -то порядка. Построенные на его основе алгоритмы
устойчивы, позволяют изменять не только шаг, но и порядок, обеспечива­
ют предельную для линейных многошаговых методов точность расчета.
В основе вывода ФДН лежит представление точного решения x{t) на
интервале tk +i_p - 4+i в виде полинома р -й степени P(t) = ссо + a - \ t +••• +схр t р,
проходящего через р + 1 точку хк+\.р,..., хк+\. С помощью полинома можно
построить систему линейных алгебраических уравнения для определения
коэффициентов а, ФДН.
Покажем использование ФДН для решения системы дифференциаль­
ных уравнений
(19)
x’ = f(x,r).
полагая, что входящие в (17), (18) величины являются векторами хк+\-р,
\ к+2- р , ... , \ к ь
и их значения известны.
Подставим (18) в (19) и перепишем в виде
р
(2 0 )
е ( х £+1 > t k+1) = a ox *+i +
x *+ w —^ f ( x t+1 ’ h + t ) — 0 .
У=1
На данном шаге сумма известна в (20) и может быть представлена
вектором г. Тогда
где верхний индекс обозначает номер итерации; М — якобиан уравнения (21);
М=
8.4. М е то д ы а н а л и за с т а ц и о н а р н ы х р е ж и м о в
Стационарный режим является одним из основных режимов работы электрон­
ных устройств. Основные показатели и характеристики устройств в этом ре­
жиме определяются путем анализа их реакции на испытательные сигналы,
являющиеся обычно периодическими функциями времени. При этом количе­
ственная оценка показателей требует, как правило, расчета комплексных ам­
плитуд отдельных спектральных составляющих в выходном отклике, посколь­
ку разработчиков в первую очередь интересует спектральный состав в различ­
ных точках схемы, а не форма сигналов. Поэтому методы анализа стационар­
ных режимов часто относят к спектральным методам анализа [1].
Для расчета стационарного режима могут быть использованы тради­
ционные методы анализа нелинейных цепей. Например, для математической
модели анализируемого устройства в виде системы нелинейных дифферен­
циальных уравнений путем их численного интегрирования одним из извест­
ных методов при нулевых начальных условиях на достаточно большом ин­
тервале времени можно определить переходный процесс вплоть до устано­
вившегося режима. Однако такой подход требует больших затрат машинно­
го времени на расчет переходного режима, который не дает полезной ин­
формации. Чтобы сократить (или исключить) из расчета стадию переходного
процесса необходимо задать соответствующие начальные условия, что в
большинстве случаев весьма затруднительно. Поэтому для анализа стацио­
нарного режима разработаны и широко используются методы, которые су­
щественно сокращают время расчета переходного процесса или вообще не
требуют интегрирования дифференциальных уравнений.
Поисковые методы. При поисковых методах анализа определяется та­
кой вектор начальных состояний, который при интегрировании системы
дифференциальных уравнений цепи (например, в форме Коши) позволяет
сразу получить параметры стационарного периодического режима (минуя
расчет переходного процесса). Суть метода состоит в представлении иско­
мого решения в виде вектора x(t) = x(t, си с2, ..., сг), который при некоторых
начальных условиях С[ (г = 1, 2, 3, ..., г) обращает исходную систему диффе­
ренциальных уравнений в систему тождеств и удовлетворяет краевым усло­
виям x(t) = х{1 + Т), где Т — период рассматриваемого процесса. Начальные
условия d находятся путем минимизации вектор-функции невязки, являю­
щейся в общем случае функцией как времени, так и параметров с\.
(1)
е = e(t, си с2, ..., сг) = х(0) - х(7),
где х(0) = (сь с2, ..., сг )— вектор варьируемых начальных условий при t = 0.
Для минимизации (1) можно использовать метод Ньютона или методы
нелинейного программирования.
Рассмотрим особенности минимизации (1) методом Ньютона, полагая, что
исследуемая система находится под периодическим воздействием с периодом
Т и описывается системой дифференциальных уравнений в форме Коши
(2)
dx(t)/dt = f(x, /),
где х(?) — w-мерный вектор состояний системы; f — я?-мерная
Г-периодическая вектор-функция, непрерывная по переменным t и х и
имеющая непрерывную первую производную по х для всех х при
<Г <
При численном интегрировании исходные уравнения (2) преобразу­
ются к виду
(3)
х ? ' = [i - F' (xi )]•' [F( x i ) - F ' (xJ0) x J0J
где x0 = x(0); I — единичная матрица; «-1» — символ обратной матрицы;
F (x 0) = х0 + Jf(x(x),x) d x \¥ '(x 0J) = дх(Г,Х-°2
о
dxo I0=xi
Таким образом, итерационный процесс нахождения начальных усло­
вий для периодического режима состоит в вычислении F(X(/)= \ L(T) и
F ’(x(/) на каждом шаге итерации.
Для вычисления F(X(/), F'(xo ) в [1] приведены соотношения, полученные
с использованием неявных методов Эйлера, и алгоритм нахождения вектора
начального состояния для периодического стационарного режима.
При использовании поисковых методов большую роль играет априор­
ная информация [24], которую можно получить либо на стадии предвари­
тельного изучения анализируемого устройства более простыми, но менее
точными методами, либо на основе опыта, накопленного при анализе
подобного класса систем. Можно также предварительно на нескольких
периодах проинтегрировать (2).
Метод гармонического баланса. Методы, позволяющие получить па­
раметры периодического режима, минуя этап интегрирования дифференци­
альных уравнений, как правило, основаны на возможности представления
решения тригонометрическим многочленом того или иного вида.
Проиллюстрируем метод на примере анализа обобщенной нелинейной
модели (см. п. 7.6), описываемой системой нелинейных дифференциаль­
ных уравнений
(4)
Z i + \|/(i) = е,
где Z = \zqr(p)\, (q, г = 1, 2, 3, ..., N) — квадратная матрица линейного
2Лг-полюсника; р = d/dt\ е, i — TV-мерные векторы входных воздействий и
искомых токов, протекающих через зажимы нелинейного многополюс­
ника; Y|/(i) — jV-мерная вектор-функция напряжений на зажимах нелиней­
ного многополюсника; ly^i) — аналитическая зависимость мгновенного
значения напряжения на q-x зажимах нелинейного многополюсника от
токов, протекающих через них; причем i = i(?), е = e(t), e4{t) = eq(t+T)=
'Lilfqm cos тш - E?qmsin mbit), m = 0, 1,..., M\ E?qm, E?qm— соответственно
амплитуды косинусной и синусной составляющих /я-гармоники eq(t)\
Т= 2я/оо — период входного воздействия.
Составление
системы
у р а в н е н и й . Искомые токи
представим в виде усеченного ряда Фурье
(5)
где f qk и Fqk — соответственно косинусная и синусная составляющие к-й гар­
моники тока через q-e зажимы; К > М, к = 0,1,..., К.
Подставим i(/) с учетом (5) в (4). После соответствующих преобразова­
ний получим систему уравнений левая и правая части представляют собой
сумму косинусных и синусных составляющих с частотами кш. Приравняв
коэффициенты при cos kwt и sin kmt, получим систему уравнений
(6)
X I V 0 '/с°) I fc c o s ф /r/ - /;;sin ф„„ )+Ц1сч,= E cgl;
Z I zv O‘/c0) I f o o s <pw - /;;sin ф (/г, )+ Ц/; = E \t ;
1
где q - 1,2, ..., N\ I = 1, ..., К; (pqH = arg zqr (//со); \|/с?/, у 5,/ — нелинейные
функции амплитуд искомых токов; v|/s<,0 = 0.
Таким образом, учитывая К гармоник в токах через зажимы нелиней­
ного многополюсника, можно получить систему из N(2K + 1) нелинейных
уравнений (6) с N(2K * 1) неизвестными, которую решить проще, чем ис­
ходную систему (4).
Погрешность
р е ш е н и я . Погрешность обусловлена тем,
что при составлении уравнений гармонического баланса не учитывались
гармонические составляющие токов с номерами выше К. Для ее оценки
будем полагать, что равенство нулю гармоник при I >К вызвано включе­
нием в исходную цепь линейного 2Лг-полюсника с частотной характери­
стикой, удовлетворяющей равенству | zqr(jlai) \ = 0. Матрица сопротивле­
ний такого многополюсника может быть представлена выражением
при I < К;
при I > К.
Если уравнения гармонического баланса составить, аппроксимируя
линейный оператор Z(p) оператором Z (р) в соответствии с (7), то по­
грешность получаемого при этом решения можно оценить с помощью
соотношений, приведенных в [1].
Метод гармонического баланса п р и м е н я е т с я при анализе ре­
зонансных усилительных каскадов, используемых в радиоаппаратуре и
многих устройствах систем автоматического регулирования. В этом слу­
чае задача отыскания параметров периодического режима существенно
упрощается, так как можно учитывать только первую гармонику токов.
Решая уравнения гармонического баланса методом последовательных
приближений, можно оценить уровень побочных гармоник.
Метод коллокаций. При решении уравнений (4) методом коллокаций
(подстановок) система уравнений для определения косинусных и синус­
ных составляющих амплитуд искомых токов Pqi и f ql составляется на ос­
нове приравнивания левых и правых частей уравнения в ряде точек внут­
ри одного периода основной частоты. Число точек должно быть равным
числу амплитуд искомых токов Гф Pqt. Значение найденных амплитуд
токов зависит от выбранных значений Шк(точек tk е [0, 7]).
8.5. С и н т е з кр а тн ы х п р е о б р а з о в а т е л е й ч а с т о ты
п о э н е р ге ти ч е с к и м к р и т е р и я м
В основу методов оптимального проектирования большинства нелинейных
устройств положен многократный анализ схемы устройства при вариации ее
параметров. При этом задача оптимального проектирования формулируется
как задача параметрической оптимизации в рамках заданной структуры схе­
мы. Ее решение для кратных преобразователей частоты (КПЧ) на нелиней­
ных реактивных элементах (НРЭ) сопряжено с большими вычислительными
трудностями из-за принципиальной необходимости учета нескольких гармо­
ник воздействия. В дальнейшем принят другой подход, ориентированный на
структурный, параметрический и компонентный синтез КПЧ, который не
связан с решением уравнений гармонического баланса. Синтез КПЧ по энер­
гетическим критериям включает в себя решение двух задач:
=> поиск оптимальных режимов НРЭ, обеспечивающих максимальные
энергетические показатели КПЧ;
=> схемную реализацию найденных оптимальных режимов.
П остановка задачи оптимизации режимов НРЭ. Допустим, что на
НРЭ воздействует полигармонический заряд
(1)
q(r) = Q0 +u =£?о+ Z £ - C0S(rT + (Pr)>
где т = ш \ Qo — постоянная составляющая заряда (смещение); Qr, фг —
амплитуды и начальные фазы составляющих заряда с частотой гш, при­
чем /ию, «со — входная и выходная частоты КПЧ (т = 1, п = N — при ум­
ножении, т = N, п = 1 — при делении частоты); /со — холостые частоты;
т, п,Е г; г — целые числа.
Допустим также, что отклик напряжения НРЭ связан с воздействием
(1) при помощи известного нелинейного оператора А и представляет со­
бой периодическую функцию
(2)
и(т) = A[q(x)] = U0 + ^ £ / reco s(rr + фг) + t / rssin (rr + cpr ),
где U0, Urc, Urs, — постоянная составляющая, амплитуды синфазных и
квадратурных (по отношению к заряду) составляющих напряжения с час­
тотами гсо, являющиеся коэффициентами ряда Фурье
(4)
1 2Г J
и 0 = — \А On +Y^Qrc o s(n + qr) А .
Тогда выражения для активной мощности НРЭ на частоте гсо можно
записать в виде
(5)
Рят = -0,5 гсоQrUn.
Для оценки энергетической эффективности кратного преобразования
частоты выберем два критерия:
(6)
Ри ~ Рщо РП\ Кр
3ист
Ра/жо +Рт
где Рн — мощность в нагрузке, или полезная активная мощность на вы­
ходной частоте «со; Рист — мощность, отбираемая от источника колеба­
ний на входной частоте тш; Рлтш > 0; Рты < 0; Рг — мощность потерь во
внешних по отношению к НРЭ цепях на частоте гсо, которая может быть
задана в виде активного сопротивления Rr или непосредственно.
Введем ограничения, отражающие требования реализуемости КПЧ:
(7)
РЫы+ Р,< 0; Ри > 0; РКСТ> 0;
(8)
q с Q,
где Q — область (множество) допустимых воздействий.
Для структурного и параметрического синтеза КПЧ необходимо
найти оптимальные параметры Q0, Qr, cpr, I воздействия (1), достав­
ляю щ ие максимум одному из выбранных критериев (6) при выпол­
нении ограничений (7), (8). Случай заданных значений /, опреде­
ляющих структуру схемы КПЧ, относится к параметрическому син­
тезу. Вид выражений для целевых функций (6) и ограничений (7), (8)
зависит от назначения КПЧ (умножитель или делитель частоты), ти­
па НРЭ, вида оператора А (2), формы представления активных мощ­
ностей (3), способа формирования ограничений (8) и задания потерь
во внешних цепях, выбранного числа составляющих воздействия (1)
и других факторов.
Одним из важных моментов при постановке задачи оптимизации яв­
ляется формирование ограничений (8), связанных с заданием области
допустимых воздействий. Интуитивно ясно, что нельзя до бесконечности
увеличивать амплитуды воздействия (1), поэтому они должны быть огра­
ничены из-за возможного выхода из строя НРЭ в связи с превышением
температурного режима или пробоем отдельных компонентов, ухудше­
нием свойств и характеристик КПЧ. В качестве ограничений (8) можно
использовать норму элемента q (1) в метрике пространства W в виде не­
равенства \\q\\w < K = const. Для метрических пространств С и /2 эти нера­
венства имеют вид
(9)
max| q (т)|< QM; max
^ К.
Г
Первое из неравенств (9) накладывает ограничение на мгновенное
значение воздействия (1), второе — на запасаемую энергию НРЭ.
Другой важный момент связан с выбором оператора А взаимосвязи
отклика с воздействием. Простейшей формой оператора А является ха­
рактеристика q(u) идеального НРЭ в виде однозначной нелинейной
функции.
Степень сложности решения задачи оптимизации в сильной мере за­
висит от числа составляющих воздействия (1). Поэтому при постановке
задачи оптимизации в воздействии (1) оставляют лишь те составляющие,
которыми обусловлен основной эффект преобразования мощности в
КПЧ. Например, в бигармонических преобразователях снимается ограни­
чение (7), относящееся к холостым частотам /со, что приводит к значи­
тельному облегчению поиска максимума целевых функций (6). Для этой
же цели могут быть введены дополнительные условия.
Решение задачи оптимизации. Общая задача поиска оптимального воз­
действия (1), при котором достигается максимум выбранной целевой функ­
ции (6) при выполнении ограничений (7), (8), относится к наиболее трудоем­
ким и менее исследованным экстремальным задачам в бесконечномерных
пространствах. При заданном числе (г) составляющих воздействия (1), а
именно этот случай представляет наибольший практический интерес, задача
оптимизации является конечномерной. К настоящему времени предложено и
исследовано большое количество методов поиска экстремума функций мно­
гих переменных. Им посвящена обширная литература. Не останавливаясь на
обзоре литературы, отметим, что путем выбора оператора А (2), способа
проведения спектрального анализа отклика (3) и ограничений (8), а также
введения некоторых дополнительных условий в ряде случаев конкретную
задачу оптимизации можно свести к виду, который позволит использовать
известные методы и алгоритмы оптимизации.
В результате решения задачи находят оптимальные параметры Qu, Qn cpr
воздействия (1). Для оптимального режима рассчитываются эквивалентные
активные (Rm) и реактивные (Хт) сопротивления НРЭ на частотах по:
а также постоянное напряжение U q опт- Э т и величины необходимы для
схемной реализации кратного преобразователя частоты.
С хемная реали заци я оп тим альн ы х режимов. Конечной целью
реализации является построение схемы КПЧ, для которой выполняют­
ся уравнения, описывающие оптимальный стационарный режим. Для
преобразователей на HP” в виде готового изделия задача схемной реа­
лизации состоит в выборе структуры схемы, параметров ее отдельных
компонентов, источника колебаний и нагрузки, обеспечивающих оп­
тимальный режим работы HP” . Для КПЧ на синтезированных НРЭ
возникает дополнительная задача по выбору компонентов синтези­
руемого элемента. Исходными данными при решении этих задач слу­
жат эквивалентные активные и реактивные сопротивления НРЭ (10)
для найденных оптимальных режимов НРЭ. Рассмотрим в общих чер­
тах основные вопросы, связанные со схемной реализацией оптималь­
ных режимов КПЧ.
В ы б о р с т р у к т у р ы с х е м ы К П Ч . Структура схемы КПЧ
зависит от способа подавления побочных гармоник на его выходе, типа
НРЭ, числа составляющих в воздействующем колебании (1). Для преоб­
разования промышленной частоты (50 Гц) при наличии трехфазной пи­
тающей сети КПЧ строятся по схемам с компенсационным способом по­
давления побочных гармоник. В кратных преобразователях радиодиапа­
зона используется фильтровой или комбинированный (для удвоителей
частоты) способ, при этом фильтрами служат одиночные контуры или
более сложные полосовые фильтры. Выбор конкретных схемных реше­
ний КПЧ определяется заданными требованиями.
В ы б о р п а р а м е т р о в с х е м ы К П Ч . Рассмотрим порядок
выбора параметров трехконтурного умножителя частоты, схема замеще­
ния которого изображена на рис. 1. На схеме обозначено: Е т, Um, ЯЖТ—
параметры источника напряжения с частотой ю; Lr, Сп Rr — параметры
контуров с частотами настройки гоо; — суммарное сопротивление потерь
на частоте rco; RH— сопротивление нагрузки; Rm Cm — эквивалентные
активное сопротивление и емкость НРЭ на частоте гсо, определяемые вы­
ражениями (10), причем R mш> 0, Rmi< 0, Rtm < 0 ; Qr — комплексные ам­
плитуды составляющих заряда; г = m, п, I.
Необходимо по известным параметрам НРЭ (Rrm Сгш) и амплитудам
воздействующего на НРЭ заряда выбрать параметры внешних по отно­
шению к нему линейных электрических цепей КПЧ.
Составим уравнения гармонического баланса реактивных и активных
мощностей на частотах гсо, полагая при этом, что входной конур настро­
ен в резонанс на тш:
=> баланс реактивных мощностей, или условие настройки контуров в
резонанс на частоту /-со:
(11)
1
j m L n +—
jm iC r +CrJ
■0, г = т,1, п\
=> баланс активных мощностей
(12)
и я = m o Q l {Rm + R m + R i m y,
R, + R,m =
0;
R„ + R H + R„a
= 0.
На основании (11), (12) предлагается следующий порядок выбора
элементов схемы КПЧ:
=> емкости Сг контуров КПЧ следует выбирать из условия слабой связи
между ними
(12)
Сг « С*ш, где г £ m ,n ,l\k e т, п, I; г * к,
а индуктивности — из условия (11) их настройки в резонанс на часто­
ты гш с учетом эквивалентных емкостей Сги), а также реактивного ха­
рактера проводимостей источника и нагрузки;
=> активные сопротивления суммарных потерь контуров (и нагрузки RH) на
частотах /со и «со должны быть скомпенсированы отрицательными сопро­
тивлениями Л/щи Rtm НРЭ. Поэтому оптимальное сопротивление нагруз­
ки R„ = -R mo-R„ (R„m< 0). Соотношение Ла/Ш+ R, = 0 обычно выполняет­
ся автоматически, поскольку является ограничением
+ Р, - 0 (7);
=> параметры источника колебаний ( Е т , ^ист) выбираются таким обра­
зом, чтобы выполнялось соотношение Uт = m a Q ^ R ^ + Rm + Rmlil),
т.е. при настроенном в резонанс входном контуре обеспечивалась оп­
тимальная амплитуда заряда (или тока co£?i);
=> для обеспечения оптимального смещения заряда £?о на НРЭ необхо­
димо подать напряжение смещения и йош (3).
В отличие от умножителей частоты, для которых все расчеты по оп­
ределению параметров ограничиваются стационарным режимом, в дели­
телях по завершении расчетов, связанных с определением оптимальных
параметров схемы, необходимо произвести проверку выполнимости ус­
ловий возбуждения колебаний и при необходимости ввести соответст­
вующую корректировку. Для самовозбуждения колебаний необходимо
выполнение следующих неравенств
(13)
R l + R,< 0; R l + R„+R„< 0 ,
где R°a, R[)mn — сопротивления НРЭ на частотах /со, «со при Q/—>0, Q„^> 0.
Выбор компонентов синтезированных
НРЭ.
При использовании синтезированных элементов выбор компонентов сило­
вой части СНРЭ можно производить на основании его идеализированной
модели по известной форме воздействия и отклика. В стационарном режиме
работы КГ14 напряжения и токи соответствующим образом распределяются
между накопителем и элементами управляемого ключа; мощность потерь
СНРЭ полностью рассеивается на управляемом ключе. Силовые элементы
СНРЭ должны быть выбраны таким образом, чтобы мощность рассеивания,
мгновенные и средние значения напряжений и токов не превышали макси­
мально допустимых значений, а СНРЭ обеспечивал преобразование задан­
ной частоты с минимальными потерями мощности. Элементы управляемого
ключа должны удовлетворять требованиям, предъявляемым к приборам при
их работе в импульсных режимах. Выбор схемного решения и параметров
информационно-управляющей цепи СНРЭ зависит от конкретных условий и
не составляет принципиальных трудностей.
Изложенный метод энергетического синтеза, апробированный авто­
ром на различных типах КПЧ, позволяет построить простые методики
расчета с приемлемой для инженерной практики точностью (см., напри­
мер, [27]).
8 .6 . М е то д ы т е о р и и ко л е б а н и й
Введение. Предметом теории колебаний является изучение общих осо­
бенностей и закономерностей колебательных процессов в различных ди­
намических системах и условий их существования. Подобные динамиче­
ские системы, в которых могут существовать колебательные процессы,
принято называть колебательными системами. В теории колебаний ос­
новное внимание уделяется разработке эффективных методов анализа и
расчета различных колебательных процессов.
Для изучения колебательных процессов в конкретных системах про­
водят классификацию колебательных систем по их динамическим свой­
ствам. В качестве классификационных признаков используют:
=> свойства параметров системы: линейные системы, нелинейные системы,
системы с распределенными параметрами, параметрические системы;
=> число степеней свободы. Под этим термином понимается наименьшее
число разрывов в электрической цепи, необходимое для того, чтобы
стало невозможным какое-либо протекание токов в рассматриваемой
системе [39];
=> энергетический признак, согласно которому системы разделяются на
активные (с внутренним источником энергии) и пассивные;
=> наличие/отсутствие источника переменного напряжения: автономные
системы и неавтономные системы;
=> кинематические признаки колебательного движения: периодичность и
форма колебаний.
В дальнейшем рассматриваются простейшие колебательные системы
с одной степенью свободы, которые описываются дифференциальным
уравнением второго порядка.
Среди нелинейных систем выделяется класс автоколебательных систем,
или автогенераторов, способных генерировать (создавать) колебания при
отсутствии внешних источников переменного напряжения. Автоколебатель­
ная система может находиться под воздействием внешних переменных сил.
В соответствии с этим, как уже упоминалось выше, употребляют термины
автономные и неавтономные автоколебательные системы.
Исследование автоколебательных систем сводится:
=> к отысканию состояний равновесия (покоя, при которых все искомые
токи и напряжения не зависят от времени) системы и исследования их
устойчивости;
=> к решению задачи о периодических колебаниях (движениях) системы:
выявляются периодические решения уравнений, и исследуется их ус­
тойчивость.
О
методах анализа автоколебательных систем. Для описания процес­
сов в автоколебательных системах используются нелинейные дифференци­
альные уравнения. В связи с отсутствием точных методов их решения разра­
ботано большое количество различных методов приближенного анализа не­
линейных цепей. Наиболее распространенными методами являются:
=> квазилинейный метод (разработан Ю.Б. Кобзаревым), или метод гар­
монической линеаризации, основанный на замене нелинейного эле­
мента эквивалентным линейным элементом, характеризуемым сред­
ним параметром (параметром по первой гармонике). Метод строится
на исследовании соотношений между первыми гармониками токов и
напряжений. В результате замены нелинейная цепь описывается ли­
нейными уравнениями и может исследоваться методами линейной
теории (например, методом комплексных амплитуд). Нелинейность
схемы проявляется в зависимости среднего параметра от амплитуды.
Квазилинейный метод справедлив для систем, колебания в которых
близки к гармоническим и получил наибольшее распространение для
инженерных расчетов стационарных режимов автогенераторов (при­
годен и для изучения переходных процессов);
=> метод малого параметра, к которому следует отнести метод медлен­
но меняющихся амплитуд, метод возмущений и др. Некоторые из них
рассмотрены ниже;
=> метод фазовой плоскости — графический метод, используемый для
анализа стационарных и переходных процессов по интегральным кри­
вым нелинейного дифференциального уравнения второго порядка.
Метод является более общим, чем предшествующие, пригоден для ис­
следования как синусоидальных, так и несинусоидальных (релаксаци­
онных) колебаний. Основные недостатки метода состоят в необходи­
мости выполнения трудоемких построений и отсутствии аналитиче­
ских решений;
=> метод линеаризации, состоящий в замене нелинейных зависимостей ли­
нейными, что возможно только для малых возмущений (отклонений).
Применяется для выявления условий устойчивости и условий самовоз­
буждения. Для исследования поведения системы при больших амплиту­
дах (стационарные автоколебания, переходные процессы) не пригоден.
М етод медленно меняю щ ихся амплитуд. Этот метод позволяет ис­
следовать класс колебательных цепей (систем) с малой нелинейностью и
малым затуханием, для описания которых используется дифференциаль­
ное уравнение
(1)
х"+х = \if(x', х ) ,
где/(х', х ) — нелинейная функция; х', х " — первая и вторая производные
искомой величины; ц — малый параметр (ц « 1).
При (х = 0 получаем уравнение х"+ х = 0, которое описывает консер­
вативную линейную систему с одной степенью свободы. Его решение
может быть записано в виде
(2)
х = Ас cos т + As sin т,
где Ас и As — постоянные, задаваемые начальным запасом колебательной
энергии цепи в виде начальных условий; при этом
х —-А с sin т + A s cos т.
Для jLt«
(3)
1 решение может быть записано в виде
х = и cos т + v sin т,
при этом
(4)
х'= -и sin т + v cos х,
где и(т) и v(x) — медленно меняющиеся амплитуды, скорость изменения
которых и '« и и v1« у. В связи с малостью и' и v' введем дополнитель­
ное условие, связывающее и' и v':
(5)
w’cosx + v'sinx = 0 .
Используя (3), (4), (5), можно от уравнения (1) перейти к системе
(6)
и'= -(д. f (и cos х + vsin х; -w sin х+ vcos x)sinx,
v'= (i f ( u cos x + vsin x; - г/sin x + vcos x )c o sx .
Для этого в левую часть (1) подставим
х”= w'sinx-Mcos х+ v' cos х+ v sin х
и (3), в правую — (3), (4); из (5) определим сначала v', а затем и' и под­
ставим в полученное соотношение.
Система (6) из двух уравнений первого порядка точно соответствует
исходному уравнению (2) второго порядка. Из этой системы следует, что
производные и' и v' имеют порядок малости ц « 1, что подтверждает
справедливость выбранных условий и ' « и м v ' « v.
Представим правые части (6) как периодические функции с периодом
2 л в виде ряда Фурье и, ограничив его одним первым членом, получим
приближенные укороченные уравнения
J
(7)
2л
I
м’= — J|u/(M,v,x)sinxc/x,
2л о
Перепишем систему (7) в виде
(8 )
м '= ф ( м , у ) ,
v '=
\ | / ( m, v ) ,
2я
v '= — jV /(w , v,x)cosxt/x.
2я 0
так как она в правых частях не содержит в явном виде времени т. Во мно­
гих случаях ее можно проинтегрировать, получая временную зависи­
мость медленно меняющихся функций и(т) и v(x), являющихся «амплиту­
дами» искомого решения.
Для стационарных движений (состояний) и = a, , v = b,, и'= v'= 0 , и тогда
(9) ф (а , ,Ь,) = 0,
V|/(a,., bt ) = 0 .
Решения системы (9) должны дать возможные стационарные ампли­
туды гармонических движений, приближенно отражающих реальный
стационарный процесс.
И ллю страция метода. Рассмотрим свободные колебания в контуре с
нелинейной емкостью в отсутствие затухания, описываемого уравне­
нием [39]
(1 0 )
x"+x = f y c - ( \ - f y y x \
При \ « 1 и у « 1 для дифференциального уравнения (10) укоро­
ченные уравнения (7) имеют вид
1 2Л/
2я 0
\
1 2Л/
2л 0
\
и'= ---- f(^C-yA:3)sinTC?T, v '= ---- |(^X-Y^3)cOSTt/X.
После вычисления интегралов получаем
и'= —-^ v + —у{и2 + v 2)v, v' = —Ъц ——у(м2 +v2)u,
2
8
2
8
или
(И )
Здесь z = и2 + v2— квадрат амплитуды искомого колебания.
Не прибегая к решению полученной системы укороченных уравнений
(11), рассмотрим возможные движения в системе. Для стационарного
состояния ( и'= v'= 0) из (11) следует два условия:
=> условие щ = v0 = 0, которому соответствует состояние покоя;
=> условие 3/4yzo = £,, которому соответствуют стационарные колебания с
постоянной амплитудой Ао =
■Поскольку обобщенная расстройка
£ = (со2 - (0 02)/(0 2, получаем со2= ю02/(1 - 3/4уz0), где Zo задается началь­
ными условиями, создающими в системе определенный исходный за­
пас колебательной энергии; С0о — резонансная частота контура; со —
частота стационарных колебаний. Зависимость частоты со свободных
(незатухающих) колебаний от амплитуды А0 =
отражает неизо-
хронность рассматриваемой нелинейной системы.
Другой вариант метода. Рассмотрим теперь другой вариант метода
медленно меняющихся амплитуд с переходом от исходных координат х и
х ’ к новым переменным — амплитуде А и фазе 0, которые также являются
медленными переменными в масштабе времени т.
Очевидно, что и=А cos0, и v = - A sin 0, и А 2 = и2 + v2; tg 0 = - v/ h , где и и
v— медленно меняющиеся амплитуды; А и 0 представляют собой соответст­
венно полярные координаты описывающей точки на плоскости переменных
и и V. Поскольку переменные и и v — медленные функции времени х, то и
амплитуда А, и фаза 0 также медленно меняются со временем (х).
Можно искать решение исходного уравнения (1) в виде
(12) х = Л cos (х + 0),
полагая, при этом что
(13)
х' = -А sin (х + 0).
Следует обратить внимание на то, что выражение (13) для х' не явля­
ется производной х (12) по времени х, которая имеет вид
(14)
х ’= A ’ cos (х + 0) - Лsin (х + 0) - Л 0' sin (х + 0).
Из (12) и (13) следует условие
(15)
/*'cos(x + 0 ) - ^ 0 's in ( x + 0) = O,
которому соответствует принятое допущение (13).
Если производную д:' (14) продифференцировать по х, а затем jc , х', х",
подставить в (1) с учетом (12), (13), (15), то получим точную систему из
двух дифференциальных уравнений
(16) A '= -\if(A , 0, x)sin(x + 0), A Q '= -\if(A , 0, x)cos(x + 0),
в которой А(х) и 0(х) являются медленными функциями времени х. Это
позволяет усреднить правые части (16) за период, полагая, что А и 0 не
изменяются. После усреднения получаем
j 2я
-2 л
(17) А '= - — |ц / ( Л , 0 , х ) sin a d a , Л 0 '= ------Си/(Л, 0, x)cosac/a,
2л 0J
2л 0J
где a = х + 0.
Таким образом, вместо системы укороченных уравнений (7) получена
система (17), которая в ряде случаев упрощает нахождение стационарных
решений [39].
8 .7 . А н а л и з ц е п е й с и с п о л ь з о в а н и е м
ф ункционал ьны х рядов
Об использовании функциональных рядов в нелинейных цепях. Для
анализа нелинейных цепей широкое применение находят функциональ­
ные ряды Вольтерра (ФРВ)
(1)
y(0 = Z
J—/Л*(т,, т2.... т * ) П х Ц - х , ) ^ , = |> * ( 0 ,
*=! Lo о
i=1
J *=|
где hk(xu х2,..., хк) — ядро Вольтерра к-то порядка [12].
Класс электрических цепей, в котором используются ФРВ, называется
классом Вольтерра — Винера, так как Н. Винер был одним из первых
исследователей, который применил их для анализа цепей.
Х а р а к т е р н ы е о с о б е н н о с т и цепей этого класса:
=> существование явной связи между воздействием и откликом;
=> одновременный учет нелинейных и инерционных (динамических)
свойств цепи;
=> простые возможности перехода к описанию цепи для частных слу­
чаев:
для линеинои цепи к интегралу свертки: у = j /г,(x)x(t - т ) dx ;
•
для безынерционной цепи к степенному ряду у = h,x + h2 х2+..., ко­
торый получается после подстановки /?i(Xi) = h\b(X\)\ h2(ть т2)=
= /b S ( T i) 8 ( T 2) ; . . . в ( 1 ) ;
возможность блочного представления (рис. 1,а) отклика (1), что мо­
жет значительно упростить задачу анализа для конкретных воздейст­
вий как по уровню, так и частотным свойствам и облегчить задачу
выделения интересующих продуктов нелинейного преобразования.
Использование блочной конструкции в виде последовательного со­
единения нелинейной и линейной цепей (рис. 1,6,в) позволяет при ап­
проксимации характеристики нелинейной цепи степенным полино-
к
мом F(z) = ~ ^ a kz k представить отклики в следующем виде:
к
К
y{t) = '£j a k jh(x)xk( t - x) dx — (рис. 1,6);
к
'
*=1
о о
'
у(0 =Z 1
“* J- )h(Ti) •••h(xk) Х1(' - Т1)■••** “'т*) ^
“ (РИС-1’в);
=> возможность перехода от оператора во временной форме (1) к опера­
тору в частотной форме (см. п. 7.6) и обратно с помощью преобразо­
ваний Лапласа (или Фурье), что облегчает задачу исследования слож­
ных электрических цепей на основе частотных методов;
=> возможность представления системы нелинейных дифференциальных
уравнений, записанной с использованием ФРВ, в виде линейных под­
систем относительно ядер соответствующих порядков [24], что позво­
ляет использовать эффективные методы анализа линейных цепей.
Рис. 1. Блочное представление электрической цепи
В настоящее время разработано большое количество методов анализа
цепей на основе ФРВ, которые относят к группе спектральных методов
анализа и разделяют на методы малого параметра (методы символьного
анализа, нелинейных токов, степенного ряда, многомерных рядов Маклорена) и методы последовательных приближений с использованием рядов
Вольтсрра — Пикара [1, 11, 12, 24] .
Помимо анализа представление отклика нелинейной цепи в виде ФРВ
позволяет также решить задачи идентификации, синтеза и оптимизации [12].
Известны методы, идеологически не отличающиеся от ФРВ. К ним
относятся метод анализа нелинейных многополюсников, метод нелиней­
ного тока, метод многомерных рядов Маклорена, рядов Вольтерра —
Пикара и др. Следует выделить метод многомерных рядов Маклорена,
для которого разработаны высокоэффективные алгоритмы, позволяющие
вычислять ядра Вольтерра высоких (и > 3) порядков при многочастотном
воздействии. Их применяют для анализа преобразователей частоты, де­
текторов и автогенераторов. Имеется ряд модификаций метода ФРВ для
повышения эффективности при проведении численных расчетов.
К необходимым у с л о в и я м и с п о л ь з о в а н и я Ф Р В для
анализа нелинейных цепей относят:
=> непрерывность и дифференцируемость оператора передачи цепи, од­
нозначность связи «вход-выход»;
=> возможность разложения характеристик нелинейных компонентов
цепи вблизи исходной рабочей точки в ряд Тейлора. Это условие рав­
носильно требованию ограничения амплитуды воздействия, что соот­
ветствует слабо нелинейному режиму работы цепи;
=> существование устойчивого решения;
=> единственность решения системы уравнений цепи на постоянном токе;
=> отсутствие самовозбуждения при отключенном воздействии и нуле­
вых начальных условиях, т.е. при x(t) = 0 цепь должна находится в со­
стоянии устойчивого равновесия y(t) = 0.
Системы, для которых справедливо описание на основе ФРВ, называ­
ют аналитическими. К их основным фундаментальным свойствам отно­
сят физическую осуществимость и устойчивость [24].
Для проведения анализа нелинейной цепи с использованием ФРВ не­
обходимо располагать выражениями ядер Вольтерра. В том случае, когда
исходными данными служат схема или уравнения цепи, существуют ме­
тодики [12], позволяющие найти точные аналитические выражения для
ядер Вольтерра теоретически любого порядка. Если же параметры цепи
известны приближенно или вообще неизвестны либо уравнения цепи
слишком сложны, то применяют экспериментальные способы определе­
ния ядер Вольтерра.
При проведении анализа должна быть уверенность в том, что при за­
данном внешнем воздействии ряд (1) сходится. Поскольку вычисление
ядер сопряжено с известными трудностями, представляют интерес оцен­
ки радиуса сходимости ряда (1) для заданной цепи. Для некоторых клас­
сов цепей такие оценки приведены в [12, 24]. Однако они не всегда удоб­
ны для практического использования и зачастую дают заниженные зна­
чения радиуса сходимости ряда. В инженерной практике распространен
другой подход к решению вопроса сходимости и оценке погрешности,
состоящий в последовательном расчете членов ряда (1) и сравнении каж­
дого последующего члена с суммой предыдущих.
Стратегия формирования системы уравнений, построения отклика це­
пи для низких порядков (п = 1... 5) и ряд других вопросов описан в лите­
ратуре [1, 11, 12, 24]. Рассмотрим некоторые методы, позволяющие уста­
новить связь между воздействием и откликом [1].
Метод прямого разложения. Этот метод состоит в таких преобразо­
ваниях исходных уравнений электрической цепи, в результате которых
они принимают форму разложения в ряд Вольтерра (1). Затем с помощью
«-кратного преобразования Фурье определяют ядра Вольтерра в частот­
ной области Нп(/ь/ ъ ...,/ 2„), или передаточные функции. Связь между
входным и выходным величинами в общем случае имеет вид
Г (/, ,...,/2,...,/2я) = £ X —
Я
„ ( / , f 2n
X 2"”( f , )
где X ( f ) и Y ( f ) — комплексные полуамплитуды спектральных сос­
тавляющих сигналов на входе и выходе нелинейной системы;
означает суммирование по всем возможным наборам /и, - х, отве­
чающим условиям rtii - 0, 1,..., я; ^ т, = п; f +rl = - f l .
Метод испытательных сигналов. Его суть заключается в определении
передаточной функции Вольтерра H„(j\...... f„) при входном воздействии
(2)
x(t) = ехр(/(о,0 + expO'aty) +■••+ ехр(/'оу),
где со, = 2я/-; i = 1, 2,..., п, причем со, несоизмеримы.
Пусть нелинейная цепь:
=> содержит нелинейное сопротивление с вольт-амперной характе­
ристикой
(3)
i = £ a ku k ;
к=1
=> описывается уравнением
(4)
e(t) = z(p)i(t)+u(t),
где e(t) — входной сигнал; i(t) и u{t) — соответственно ток через нели­
нейное сопротивление и напряжение на нем; p=d/dt — оператор диффе­
ренцирования.
При выбранных входном воздействии (2) и характеристике (3) ряд
Вольтерра для напряжения на выходе нелинейной цепи u(t) будет
иметь вид
(5)
м (0 = £ Х — 7 ~ —
mx\..m2n\
..... / 1 ..... / i « ...... / 2 ») exp f . / X '” i0V
~---- .---- '
rrt\
------ .------■
m2n
^ /=,
)
•
При использовании рассматриваемого метода передаточные функции
Вольтерра определяются последовательно по мере увеличения их поряд­
ка, поэтому сначала положим
(6)
е(0 = ехр(/С0 |/).
В этом случае в соответствии с (5)
u(t) = ^ H n( f , . . . , f ) e x p j n ( a ]t .
(7)
п= 1
Подставив (7) в (4) с учетом (3) и (6), получим
к
(8)
ехрО'со,/) = z ( p ) £ я* £ Н„ ( / , .. .. / , )ехр(уиш,/)
к=1
+Z
Я » ( /1
+
’•••’ /I )е х р 0 с о ,0 .
/1=1
Приравняв коэффициенты в левой и правой частях (8) при exp(/ov),
получим l=a|Z(/ot>i)-#i(/i) + //|(/i), откуда находим
Я 1( / ,) = 1 / [ а 17(/'со,)+1].
Для определения передаточной функции второго порядка
/ 2)
принимаем е(?) = exp(/'a)iO + ехр(/оу) и т. д. Продолжая подобные опера­
ции, можно вычислить передаточные функции любого порядка.
Сложность вычислений с ростом п резко увеличивается. Поэтому метод
испытательных сигналов обычно применяют для определения передаточных
функций первых порядков (п < 4). Следует отметить, что метод пригоден
только для получения аналитических выражений для
■••,/„), и его
нельзя непосредственно использовать для экспериментального определения
и для расчета с помощью ЭВМ передаточных функций общего вида. Это
связано с тем, что воздействие (2) не является действительным числом.
Метод нелинейных генераторов. В основе этого метода лежит последо­
вательное определение выходных реакций y„(t) (1) для п = 1, 2, 3,.... Для по­
яснения его особенностей рассмотрим нелинейную цепь, описываемую
дифференциальным уравнением (4). Допустим, что при воздействии на нее
входного сигнала в\(t) выходная реакция порядка п имеет вид u„(t). Тогда при
подаче на вход сигнала eEl(t) =Ee\(t) выходную реакцию «-го порядка можно
представить как иЕп(0 =£'”u„(l) [1], где Е — фиктивная переменная, введение
которой существенно упрощает решение поставленной задачи.
После подстановки e£\(t) и г//.>,(/) в (4) получим
(9)
Eel(t) = z ( t ) ^ a iк
к=1
+ 1 E"u„(t).
к =1
Для определения u\{t ) продифференцируем обе части (9) по Е, а затем
примем Е = 0, тогда
(10)
е,(0 = z(p) a\U\ (t )
+ M i(/).
Таким образом, реакция первого порядка U\(t) отыскивается в результате
решения линейного дифференциального уравнения (10), которое описывает
исходную цепь, если в ней вместо нелинейного сопротивления (2) включить
линейную проводимость, равную а
Для определения реакции второго порядка и2(() дважды продиффе­
ренцируем (9) по Е, после чего, приняв Е = 0, получим
(11)
-z{p) а2и21 = z(p) a,u2(t) + u2(t),
где U\{t) — решение уравнения (10).
Описанная процедура повторяется до тех пор, пока не будут рассчи­
таны все выходные реакции u\(t), u2(t),... u„(t). Затем, применяя к найден­
ному отклику u(t) = Ъ ф ) преобразование Фурье, определяется спек­
тральный состав выходного сигнала.
Таким образом, для определения реакции uk(t) k-ro порядка каждый
раз необходимо решать линейное дифференциальное уравнение, описы­
вающее исходную цепь, в которой источник входного сигнала заменен
нелинейным генератором. При этом ЭДС генератора выражается через
выходные реакции более низкого порядка.
В общем случае ЭДС нелинейного генератора для расчета выходной
реакции и-го порядка
ея(0 = ~z{p)\ £ a mT — r — .{l<i( 0 Pl - u m(t)Pm]}
l*-2 р, P^-Pj
J
где Хр/ означает, что суммирование производится по всем наборам р\, р 2,
рт удовлетворяющим условиям
Р\ +2р2 + ... +трт = п;
Y sPi = т и А = 0 , 1,2, ...,п.
Определение выходных реакций различных порядков можно упро­
стить, если первое слагаемое в характеристике (3), отражающее линей­
ную зависимость между /'(/) и u(t), отнести к линейной части схемы.
При анализе нелинейных цепей общего вида на каждом шаге, по­
зволяющем рассчитать выходную реакцию последующего порядка,
приходится решать не одно линейное дифференциальное уравнение, а
систему.
Таким образом, выходную реакцию нелинейной цепи методом
нелинейных генераторов находят, многократно решая линейное
дифференциальное уравнение вида (10) при различных значениях
левой части.
Наиболее трудоемким этапом анализа нелинейных систем с примене­
нием аппарата функциональных рядов Вольтерра является определение
передаточных функций или выходных реакций соответствующего поряд­
ка. Если же эти характеристики известны, то отыскать выходной отклик
при заданном входном воздействии не составляет труда. Отметим, что
после отыскания выходных реакций требуемого порядка можно не опре­
делять передаточные функции Вольтерра, так как разложение u(t) в ряде
Фурье позволит сразу оценить его спектральный состав.
8 .8 . В в е д е н и е в т е о р и ю у с то й ч и в о с ти
Теория устойчивости занимается выявлением условий равновесия дина­
мической системы. Под равновесием системы понимают состояние, кото­
рому удовлетворяют уравнения ее математической модели. В линейных
цепях существует только одно состояние равновесия:
=> состояние покоя, при котором изменяющиеся во времени токи и на­
пряжения принимают определенные постоянные значения или
=> периодический (апериодический) установившийся режим, определяе­
мый параметрами источника ЭДС или тока.
При анализе нелинейных цепей можно получить несколько состояний
равновесия. Теория устойчивости позволяет из всех теоретически воз­
можных режимов цепи выявить установившийся режим, соответствую­
щий устойчивому состоянию равновесия системы. Следует отметить
большой вклад в теорию устойчивости выдающегося русского математи­
ка А. М. Ляпунова, который доказал ряд теорем, решающих в общем виде
задачу устойчивости.
Виды равновесия. В нелинейных электрических цепях в общем слу­
чае возможны следующие виды равновесия (режимы, типы движения):
=> статическое состояние равновесия;
=> периодическое движение с частотой источника периодической ЭДС
или тока — вынужденные колебания;
=> периодическое движение при отсутствии в системе источников пе­
риодической ЭДС (или тока) — автоколебания;
=> резонансные режимы на высших, низших и дробных гармониках;
=> квазипериодические (как бы периодические) режимы по типу автомо­
дуляции и др.
Каждое из этих состояний равновесия (режимов, типов движений)
может быть исследовано на устойчивость.
Виды устойчивости. Различают следующие виды устойчивости сис­
темы (цепи, режима):
=> устойчивость «в малом», которая выявляется с помощью малого возму­
щения (независимо от того, какими причинами оно вызвано) по характе­
ру протекающих процессов. При устойчивом «в малом» режиме откло­
нение от исходного режима, вызванное возмущением, с течением време­
ни уменьшается, и система возвращается к исходному состоянию, а при
неустойчивом «в малом» режиме — отклонение увеличивается, и систе­
ма не возвращается в исходное состояние;
=> устойчивость «в большом», которая выявляется с помощью большого
возмущения. При устойчивом «в большом» режиме, система, получив
достаточно большое начальное отклонение, возвращается после пре­
кращения его действия к исходному состоянию. Неустойчивая «в
большом» система не возвращается к исходному состоянию.
На рис. 1,а показаны два неустойчивых (1, 2) и одно устойчивое (3)
состояния равновесия. В неустойчивых состояниях достаточно малейше­
го воздействия, чтобы шарик не вернулся в исходное состояние.
С помощью рис. 1,а можно установить различие между устойчивостью
«в малом» и устойчивостью «в большом». При малых возмущениях ша­
рик возвратится в исходное состояние равновесия 3. Если же шарик
толкнуть с большей силой, то он, минуя точку равновесия 1, в исходное
состояние не вернется. В этом случае говорят, что система является ус­
тойчивой «в малом» и неустойчивой «в большом»;
=> устойчивость по Ляпунову, которая характеризуется расположением
области 8(e) начальных отклонений системы и области е заданных
допустимых отклонений. Для устойчивой по Ляпунову системы об­
ласть 8(e) находится внутри области е (рис. 1, б), т.е. начальные от­
клонения с течением времени не выходят за пределы области е;
Неустойчивое
равновесие
Устойчивое равновесие
а)
б)
Рис. 1. Иллюстрация устойчивых — неустойчивых состояний равновесия (а)
и устойчивости по Ляпунову (б)
=> асимптотическая устойчивость, которая выявляется по разно­
сти между возмущенным и невозмущенным движениями. Если с
течением времени разность стремится к нулю, движение назы­
вают асимптотически устойчивым. При малых размерах области
начальных отклонений 5(e) движение называют асимптотически
устойчивым «в малом», при больших размерах области 8(e) —
асимптотически устойчивым «в большом». Система, возвра­
щающаяся на свою периодическую орбиту, является орбитально
устойчивой.
Отметим, что для большинства практических задач проводится иссле­
дование устойчивости «в малом». Этому вопросу и уделено основное
внимание в дальнейшем.
Задача и методы исследования устойчивости. Рассмотрим нели­
нейную электрическую цепь, которая описывается совокупностью диф­
ференциальных уравнений первого порядка
(1)
dxjdt = Fv{xi, х2,..., хп, г); v = 1,2, 3,..., п.
Для исследования устойчивости вводят такие понятия, как невоз­
мущенное и возмущенное движения, а также возмущение. Частное ре­
шение x v = ( p v ( ? ) системы уравнений ( 1 ) , соответствующее начальным
условиям х„(/о), называют невозмущенным движением. Для существо­
вания (или физической реализации) невозмущенного движения необ­
ходимо, чтобы оно было устойчиво. Это требование связано с тем, что
всякая физическая система подвергается внешним воздействиям (теп­
ловые шумы, изменение температуры, внешние поля и т.д.), которые
не учитываются при составлении дифференциальных уравнений и вы­
боре начальных условий. Движение в реальной цепи или движение
после приложенного внешнего воздействия (которое может быть сня­
то) будем называть возмущенным движением и обозначать xv(t). Воз­
мущение представим как разность значений (различие) возмущенного
и невозмущенного движений
(2)
&v - x v - фу(0-
В нелинейных цепях возможны случаи, когда возмущенное движение
при сколь угодно малом начальном отклонении нарастает (даже после
снятия внешнего воздействия) и в дальнейшем значительно отличается от
невозмущенного движения.
Приведем определение устойчивости по А.М. Ляпунову (рис. 1,б):
невозмущенное движение фу(0 называется устойчивым относительно
величины xv, если для всякого небольшого положительного числа е
существует другое такое число 5(e), которое для всех возмущенных
движений xv = xv(t):
=> в начальный момент времени t —to удовлетворяло неравенству
(3)
| Xv(t0) - <pv(f0)| ^ 5;
=> для всех последующих моментов времени t > to — неравенству
(4)
| xv(t) - cpv(/)| < е.
В противном случае невозмущенное движение неустойчиво.
Невозмущенное движение называют фу(0 асимптотически устойчи­
вым, если:
=> оно является устойчивым в смысле выше указанного определения, т.е.
удовлетворяет соотношениям (3), (4);
=> можно выбрать число 8 такое, чтобы для всех возмущенных движений,
которые удовлетворяют (3), выполнялось дополнительное условие
(5)
Нт[х„(О-ф„(О]=0.
f—*oо
Это означает, что при возмущенном в начальной точке времени t —
to асимптотически устойчивом движении возмущения не только оста­
ются внутри определенной границы е (3), но и затухают с течением
времени.
Таким образом, невозмущенное движение устойчиво, если воз­
мущенное в начальной точке времени to движение проходит в его непо­
средственной окрестности 8 и не покидает определенную соседнюю об­
ласть е (рис. 1,6). Оно асимптотически устойчиво, если возмущенное
движение асимптотически стремится к невозмущенному.
П о с т а н о в к а з а д а ч и . При исследовании устойчивости дви­
жения от переменных xv в (1) переходят к новым переменным 5V(2) —
возмущениям, которые представляют собой разность между возмущен­
ным и невозмущенным решением уравнений (1).
Для возмущений справедлива следующая система уравнений
(6)
dbjdt =fv (Si+фь 82+ф2,..., 8„+ф„, t ) - f v (фь ф2,..., фи, О
или в сокращенном виде
(7)
d6v/dt = AV(8U62,..., 8„, t); v = 1,2, ...,« .
Уравнения (6), (7) называются дифференциальными уравнениями
возмущенного движения. Отметим, что решение 8] = 82 = ... = 8„ = О
соответствует невозмущенному движению, или состоянию равновесия
для цепи.
Представим правые части (7) в виде ряда по степеням 5„. Учитывая,
что Ду(0, 0,..., 0, 0 = 0 ( 6 ), получим
dbjdt = aviS) + av282, . .., avnb„ + ABv(§b 82, . . 8„, t),
(8 )
где avr — постоянные коэффициенты; v, r = 1, 2, 3,..., n ; ABv(§i, 82 ,. • 8 „, 0
сокращенная запись для всех членов ряда высокого порядка с показате­
лями степеней SviV, превышающими единицу (N > 1). При малых возму­
щениях ( 8 „ -» 0 ) члены ABv(8 ,, 8 2,..., 8 „, 0 -» 0 , поэтому при исследова­
нии устойчивости вместо ( 8 ) можно рассматривать линеаризованную
систему уравнений
dbv/d t= avi8 i + ^
(9)
282 » •• ■>
п8 л, ^
1» 2, ..., п.
Систему уравнений (9) называют системой уравнений первого при­
ближения.
Таким образом, задача об исследовании устойчивости движения по
отношению к величинам xv свелась к задаче устойчивости состояния рав­
новесия по отношению к возмущениям 8 V. В простейшем случае она со­
стоит в исследовании устойчивости линейной цепи.
М е т о д ы и с с л е д о в а н и я у с т о й ч и в о с т и . Выделяют
две группы методов:
=> методы, требующие нахождения решения дифференциальных
уравнений ( 7 ) возмущенного движения (хотя бы приближенного и
пригодного для малой области изменения переменных), т.е. ус­
тойчивость/неустойчивость выявляется на основании анализа ре­
шения уравнений. Сюда относится метод уравнений первого при­
ближения, или линеаризации, который рассматривается в даль­
нейшем;
=> методы, использующие уравнения движения (7) лишь для построения
специальных функций (без нахождения решения). Метод состоит в со­
ставлении определенной функции от 8 ь 8 2, ..., S„, I с особыми свойст­
вами (функции Ляпунова), из поведения которой и поведения ее про­
изводной по времени в окрестности нуля можно сделать вывод об ус­
тойчивости или неустойчивости движения. Эта группа методов носит
название второго, или прямого, метода Ляпунова и широко использу­
ется на практике.
Метод линеаризации. После подстановки в (9) переменной
и ее производных получим алгебраическую систему уравнений:
(10)
(а м -р )С \ + а 12С2 + апСз +•••+ а\пС„ = 0;
8
v —С^еР
а 2 \С\ + (й22 —р)Сг + «пСз н— I- а\„С„ = 0;
а„\С\ +а„2С2 + о„3С3 +•••+ (апп-р)С„ = 0
Система уравнений (10) имеет отличное от нуля решение, если опре­
делитель, составленный из коэффициентов, равен нулю:
аи - р
аХ2
а 13
а22 Р а2Ъ •••
а2„
ат ~ Р
Уравнение (11) п-й степени (с неизвестным р) является характеристи­
ческим уравнением системы (9). В случае п различных корней р , общее
решение системы (9) имеет вид:
Постоянные Cvi определяются из (10) после подстановки р = р,.
Рассматривая систему (9) как уравнения возмущенного движения ли­
нейной цепи, можно из общего решения (12) сделать следующие выводы
об ее устойчивости:
=> цепь неустойчива, если среди корней р, характеристического уравне­
ния (11) найдется хотя бы один корень с положительной веществен­
ной частью. В этом случае в решении (12) присутствует член, который
с течением времени неограниченно возрастает;
=> цепь асимптотически устойчива, если при наличии комплексносопряэкенных корней вещественные части всех корней р, отрицатель­
ны. В этом случае из-за отсутствия в решении (12) возрастающих со
временем членов выполняется условие (5);
=> цепь устойчива, если среди корней р, отсутствуют комплексно­
сопряженные и кратные корни; все значения корней отрицательны.
Однако такая цепь не является асимптотически устойчивой, так как не
выполняется условие (5). В результате внешнего воздействия цепь пе­
реходит в другое устойчивое состояние.
О тметим, что случай кратных корней р , может привести как к ус­
тойчивому, так и неустойчивому решению. При наличии нулевого
корня и (или) чисто мнимых корней для исследования вопроса об
устойчивости движения следует вместо системы уравнений (9) ис­
пользовать (8), для привлечения членов со второй степенью возму­
щений 8V.
Вопрос о возможности суждения об устойчивости/неустойчивости нели­
нейных цепей по результатам рассмотрения уравнений первого при­
ближения (8) возмущенного движения, впервые был рассмотрен А.М. Ляпу­
новым. Эти положения приведены ниже:
=> если все корни p t характеристического уравнения (11) имеют отри­
цательные вещественные части, то невозмущенное движение ус­
тойчиво независимо от членов разложения выше первого порядка
малости;
=> если среди корней р, найдется хотя бы один с положительной вещест­
венной частью, то невозмущенное движение неустойчиво, как бы ни
были выбраны члены высшего порядка в дифференциальных уравне­
ниях возмущенного движения;
=> если характеристическое уравнение (11) не имеет корней с поло­
жительной вещественной частью, однако имеет такие корни, у
которых вещественная часть равна нулю, то путем вы бора членов
в ABv(5b 82,..., 8„, 0 (8) можно получить устойчивость или неус­
тойчивость.
Два первых положения относятся к некритическим случаям, для ко­
торых можно дать однозначный ответ из исследования системы первого
приближения об устойчивости нелинейной системы. Третье положение
указывает на критические случаи, для которых определенный вывод об
устойчивости можно сделать только при дополнительном выборе членов
высшего порядка в системе дифференциальных уравнений возмущенного
движения.
К ритерии устойчивости. Рассмотренный выше метод требует вы­
числения всех корней р , характеристического уравнения системы.
Чтобы этого не делать, были разработаны критерии устойчивости.
С их помощью можно исследовать устойчивость, не прибегая к опре­
делению численных значений корней. К таким критериям относятся
алгебраический критерий Гурвица и частотный критерий Михайлова.
Критерии устойчивости основываются на известной теореме Коши
относительно числа нулей и полюсов функции, аналитической в за­
данной области.
К р и т е р и й Г у р в и ц а . Согласно теореме Гурвица для отрица­
тельных значений действительных частей корней характеристического
уравнения
(3)
аор"+ а\рлЛ + а2р"'2+...+ а^р + а0= О
необходимо и достаточно, чтобы п определителей Гурвица Av(v = 1, 2,..., п)
были больше нуля, т.е.
«1
°0
0
Д.. =
0
а г
а 5
■
0
■
0
0
а 5
•
0
0
а 4
.
а 7
а2 аА
а,
аъ
а о
а 2
0
0
0
.
0
0
0
.
«6
0
> 0.
:
О
0
•
« V -I
• Я.-2
0
«V
Определитель Гурвица Д„ составляется по следующему правилу:
=> по главной диагонали определителя в порядке возрастания индексов
записываются коэффициенты от а, до a v;
=> в каждом из столбцов над диагональным элементом аг индексов запи­
сываются коэффициенты с возрастающими индексами г до значений
г = v, а далее следуют нули;
=> в каждом из столбцов под диагональным элементом аг индексов запи­
сываются коэффициенты с убывающими индексами г до а0 включи­
тельно, а далее — нули.
Из теоремы Гурвица следует, что все коэффициенты (а0, аи ..., а„ ..
характеристического уравнения устойчивой системы положительны.
Ниже приведены условия устойчивости для цепи:
=> первого порядка (п = 1): Д, = я, > 0;
=> второго порядка (п = 2): Д, = а, > 0;
Д2 =
о
= а,а2. > 0 ;
третьего порядка (п = 3):
Д, = а, > 0;
Д2
а,1 а,
«о
а-
--ata2- a 0a3 > 0;
Д3 = а , Д 2 >0,
а, > 0.
Из приведенных соотношений вытекает, что
для цепи второго порядка положительные вещественные корни (или
комплексно-сопряженные с положительной действительной частью)
будут в случае, если какой-либо из коэффициентов уравнения (а0, а\, яг)
окажется отрицательным;
для цепи третьего порядка положительные вещественные корни (или
комплексно-сопряженные с положительной действительной частью)
будут в случае, если какой-либо из коэффициентов (а0, аи а2, а3) ока­
жется отрицательным или если а,а2- а0а3 < 0.
Отметим что коэффициенты а(), а ь а2,.~ могут оказаться отрицатель­
ными:
=> в цепях с туннельным диодом (или другим подобным элементом), у
которого точка равновесия оказывается на падающем участке харак­
теристики вольт-амперной характеристики;
=> в схемах устройств с положительной обратной связью;
=> в схемах делителей частоты на нелинейных реактивных элементах
(см. п. 8.5).
К р и т е р и й М и х а й л о в а . Для устойчивой цепи при измене­
нии частоты со от 0 до °° вектор годографа комплексной функции
У„(/'со) характеристического по­
линома цепи Y„(p) поворачива­
ется на 0,5 пп, где п — степень
полинома.
В качестве примера на рис. 2
приведены годографы:
=> устойчивой цепи (п = 5), так
как вектор ^(/ю ) поворачивается
Рис. 2. Годограф устойчивой (а)
на угол 2,5я (рис. 2,а);
и неустойчивой (б) цепи
=> неустойчивой цепи (и = 4),
так как суммарный угол поворота вектора KtO'co) составляет 2л, при
этом сначала вектор поворачивается против часовой стрелки, а затем
по часовой (рис. 2,6).
Раздел 3
АНАЛО ГО ВЫ Е И ИМ ПУЛЬСНЫ Е
УСТРОЙСТВА
9. У С И Л И Т Е Л Ь Н Ы Е У С Т Р О Й С Т В А
9.1. О б щ и е с в е д е н и я об у с и л и т е л я х
У с и л и т е л е м называют устройство (узел, каскад), предназначенное
для повышения уровня мощности входного сигнала с сохранением его
формы или формы имеющегося в нем сообщения в виде модулирующей
функции. Принцип действия усилителя основан на управлении энергией
мощного источника с помощью маломощного. Управляющий источник
энергии, от которого поступают подлежащие усилению сигналы, назы­
вают источником сигналов, а цепь усилителя, в которую вводят усили­
ваемые сигналы, — входной цепью или входом усилителя. Устройство,
являющееся потребителем усиленных сигналов, называют нагрузкой уси­
лителя, а цепь усилителя, к которой подключена нагрузка, выходной це­
пью или выходом усилителя. Источник, от которого поступает энергия,
называют источником питания усилителя.
Основные классификационные признаки усилителей. П о х а ­
р а к т е р у у с и л и в а е м ы х с и г н а л о в следует выделить:
=i> усилители аналоговых сигналов, мгновенные значения которых из­
меняются во времени непрерывно. К таким сигналам относятся гар­
монические, непрерывные периодические и квазипериодические
сигналы;
=> усилители импульсных сигналов, мгновенные значения которых и
скорость изменения мгновенных значений изменяются во времени
весьма резко. К импульсным сигналам относятся сигналы прямо­
угольной, треугольной и другой формы.
По д и а п а з о н у
частот
усиливаемых колебаний следует
выделить:
=> широкополосные усилители, для которых отношение максимальной
частоты к минимальной частоте
» 1. К ним относят усили­
тели постоянного тока с F M„H= 0 и видеоусилители;
=> узкополосные усилители, для которых FmKCIFMm ~ 1.
В радиоприемной технике усилители классифицируют также по а б солютным
значениям
ч а с т о т усиливаемых колебаний,
выделяя:
=> усилители высокой частоты, предназначенные для усиления прини­
маемых высокочастотных радиосигналов с амплитудной, частотной и
фазовой модуляцией;
=> усилители промежуточной частоты, используемые для усиления мо­
дулированных сигналов преобразованной частоты, которая меньше
частоты радиосигнала;
=> усилители низкой частоты, усиливающие колебания звуковой частоты.
По в и д у н а г р у з к и различают:
=> апериодические (резистивные) усилители, нагрузка которых практи­
чески не зависит от частоты в широком диапазоне частот;
=> избирательные (резонансные) усилители, нагрузкой которых являют­
ся колебательные контуры или фильтры.
Общий принцип усиления колебаний. Для выявления принципа
усиления сигналов рассмотрим замкнутую цепь из источника постоянно­
го напряжения Е, нагрузочного резистора R„ и управляемого резистора
Ry, сопротивление которого изменяется с помощью сигнала ис (рис. 1,а).
Изменение Ry приведет к изменению тока i в этой цепи. Так как ток i в
цепи протекает в одном направлении (г > 0), выделим:
постоянную составляющую тока ]0, которая вызывает отбор мощности
Р0 = £7() от источника постоянного напряжения Е;
> переменную составляющую тока
которая создает в нагрузочном
резисторе R„ мощность полезного сигнала.
а)
б)
Рис. 1. Принцип усиления сигналов (а) и его реализация (б)
При изменении значения Ry в пределах от со до 0 ток i изменяется от 0 до
E/RH, что соответствует изменению мгновенной мощности в нагрузочном
резисторе R„ от 0 до E2/RH. Отсюда следует, что для увеличения мощности
сигнала в нагрузочном резисторе следует расширять пределы изменения
сопротивления управляемого резистора Ry, увеличивать напряжение источ­
ника Е и уменьшать нагрузочное сопротивление RH. Так как функции сигна­
ла ис сводятся лишь к изменению значения сопротивления управляемого
резистора Ry, на что принципиально не требуется затрат мощности, в нагру­
зочном резисторе RHможно получить уровень мощности, значительно пре­
вышающий уровень мощности источника сигналов ис.
Таким образом, принцип усиления мощности сигналов базируется на
управлении сопротивлением резистора Ry в цепи источника постоянного
напряжения Е большой мощности с помощью маломощного источника
входного сигнала ис, благодаря чему мощность отбирается от источника
Е и передается в нагрузку ЯИ.
Функции управляемого резистора выполняют транзисторы (рис. 1,б).
Для создания требуемого режима работы транзистора в схему усилителя
вводят дополнительные элементы (резисторы, конденсаторы, катушки
индуктивности и др.). Транзистор вместе с источником питания и допол­
нительными элементами образует собственно усилитель, или усилитель­
ный каскад, к которому подключаются источник сигналов и нагрузка.
Соединив последовательно отдельные каскады, можно построить много­
каскадный усилитель. Принципы построения усилительных схем рас­
смотрены в параграфе 9.4.
П оказатели усилителя. Усилитель является передаточным зве­
ном, которое можно представить в виде линейного четырехполюсни­
ка. Свойства усилителя и качество его работы оценивается по пока­
зателям, полученным в результате тестирования. Тестовым сигналом
для аналоговых усилителей выбирают гармоническое колебание (и\),
так как при прохождении через линейный четырехполюсник оно со­
храняет свою форму (и2), изменяя при этом амплитуду и претерпе­
вая временной сдвиг (рис. 2,а,б).
Усилительный каскад следует рассматривать с трех точек зрения:
=> для источника сигналов усилитель является нагрузкой, поэтому пред­
ставляет интерес его входное сопротивление или проводимость;
=> для нагрузки усилитель служит источником сигналов, поэтому следу­
ет знать его параметры как источника (например, ЭДС и внутреннее
сопротивление);
=> как передаточное звено усилитель характеризуется коэффициентом
усиления (передачи) напряжения и тока.
Рис. 2. Прохождение гармонического сигнала (а) через линейную цепь (б)
и нелинейную цепь с двухсторонним ограничением (в)
Ч а с т о т н ы е х а р а к т е р и с т и к и и и с к а ж е н и я . Ис­
пользуя комплексную форму представления гармонических колебаний, можно
сформировать такие важные показатели усилительного каскада в линейном
режиме, как входные сопротивление и мощность, выходная мощность, коэф­
фициенты усиления (передачи) напряжения и тока. Зависимости показателей
от частоты со тестового сигнала называются частотными характеристиками.
Среди этих зависимостей наиболее важной является зависимость коэффици­
ента усиления напряжения от частоты К((й) ехр /'ф(со), где:
=> К(<а) — амплитудно-частотная характеристика (АЧХ), представляю­
щая собой зависимость отношения амплитуд выходного и входного
напряжений (U2/U\) от частоты со усиливаемого сигнала;
=> ф(со) — фазочастотная характеристика (ФЧХ), или зависимость фазового
сдвига ф между выходным и входным напряжениями от частоты со.
На рис. 3 изображены АЧХ и ФЧХ широкополосного и резонансного
усилителей.
АЧХ
-9 0 '
Рис. 3. АЧХ и ФЧХ широкополосного (а) и резонансного (6) усилителей
По АХЧ и ФЧХ широкополосных усилителей оцениваются линейные
искажения, обусловленные зависимостью сопротивления линейных ре­
активных элементов от частоты. Идеальной АЧХ является прямая линия,
параллельная оси абсцисс. Усилитель с идеальной АЧХ имеет постоян­
ный коэффициент усиления на всех частотах. Реальная АЧХ позволяет
определить рабочий диапазон и амплитудно-частотные искажения. Рабо­
чим диапазоном называют полосу частот
+ FMакс, в пределах которой
модуль коэффициента усиления не выходит за пределы заданных допус­
ков. Например, рабочий диапазон усилителей для телефонии составляет
0,3+3,4 кГц. Идеальной ФЧХ является прямая линия, проходящая под
любым углом через начало координат: ср(со) = -Т,ш, где Тъ= const. В этом
случае выходное гармоническое напряжение
и2= U2cos [со/ +ф(со)] = U2cos со(/ -Т 3)
с любой частотой ю получает задержку относительно входного на время
Тг. Следовательно, усиливаемый сигнал, представляющий собой сумму
гармонических колебаний, сохраняет свою форму на выходе усилителя,
однако сдвигается во времени на Тъ. Оценку фазочастотных искажений
производят по отклонению фазового угла ф от идеальной ФЧХ. Для ши­
рокополосных резистивных усилителей идеальная ФЧХ совпадает с осью
абсцисс, т.е. ТЛ= 0. Поэтому для оценки искажений служат фазовые углы
Ф„, фв (рис. 3,а). Искажения в нижней части рабочего диапазона обуслов­
лены наличием в усилителе разделительных (по постоянному току) эле­
ментов, в верхней части — паразитными емкостями транзисторов и на­
грузки. Следует отметить, что фазовые искажения звуковых колебаний
не воспринимаются человеческим ухом, однако при усилении видеосиг­
налов они приводят к искажению засветки экрана.
Для резонансных усилителей АЧХ (рис. 3,6) позволяет:
=> оценить неравномерность усиления в полосе пропускания приемника,
приводящую к амплитудно-частотным искажениям звуковых колеба­
ний после детектирования;
=> определить ослабление сигнала при заданной расстройке относитель­
но резонансной частоты со0колебательного контура.
Идеальная АЧХ для оценки указанных параметров должна иметь
П-образную форму. По ФЧХ (рис. 3,6) можно оценить так же, как и для
широкополосных усилителей, фазовые искажения, вносимые усилителем.
Идеальной ФЧХ является прямая, проходящая под углом через со0Нелинейные
и с к а ж е н и я . При увеличении амплитуды
входного напряжения синусоидальной формы наблюдается искажение фор­
мы выходного напряжения. Это обстоятельство вызвано нелинейностью
вольт-амперных характеристик транзистора. Увеличение напряжения на базе
транзистора вводит его в режим насыщения, в котором ток и напряжение на
коллекторе транзистора остаются неизменными. При уменьшении напряже­
ния на базе транзистор переходит в режим отсечки. В этом режиме ток че­
рез транзистор не протекает. Поэтому при очень больших амплитудах вход­
ного напряжения выходное напряжение имеет форму, близкую к прямо­
угольным импульсам (рис. 2,в). Искажение формы гармонического напряже­
ния при усилении, обусловленное нелинейностью вольт-амперных характе­
ристик транзисторов, принято называть нелинейными искажениями.
В широкополосных усилителях нелинейные искажения сопровожда­
ются появлением высших гармоник в выходном напряжении. Поэтому
для их оценки используют коэффициент гармоник, представляющий со­
бой следующее отношение:
...
,
^ и 2.2+ и 2.Ъ+ и 2А+'" _ \Р2.2 + Р2.Ъ+ Р2А + ' ' ’
и 2Л
ргл
где U2,1, Ргл, U2,2, Р2.2 , С/2.3, ^ 2.3, Л>,4, U2A— амплитуды выходного напря­
жения и выходная мощность 1-й, 2-й, 3-й, 4-й и т. д. гармоник, причем
Рг.п= 0,5 U22.„/RH; Rh— сопротивление нагрузки усилителя.
Как следует из (1), нелинейные искажения, по сути дела, оцениваются
отношением суммы активных мощностей всех высших гармоник к мощ­
ности основной частоты.
Амп литудная
характеристика.
Амплитудной харак­
теристикой называют зависимость амплитуды выходного напряжения от
амплитуды входного (рис. 4). Она не про­
ходит через начало координат из-за нали­
чия собственных шумов Um усилителя и
имеет область насыщения или ограниче­
ния амплитуды выходного напряжения,
что обусловлено нелинейными свойства­
ми транзисторов. Амплитудная характе­
ристика позволяет определить:
=> коэффициент усиления (по наклону);
=> динамический диапазон D = U\vaJ U \ mm
усилителя;
Рис. 4. Амплитудная
характеристика усилителя
=> максимальную амплитуду U
вход­
ного напряжения, при которой в усилителе не проявляются нелинейные
искажения.
9.2. Б азовы е уси л и тел ь н ы е каскад ы и их св о й ств а
С хемы базовых уси ли тельн ы х каскадов. К базовьш усилительным
каскадам отнесем каскады, построенные на одном усилительном элемен­
те. Возможны три схемных решения таких усилительных каскадов, отли­
чающихся способом подключения источника сигналов и нагрузки к элек­
тродам усилительного элемента. Для случая, когда усилительным эле­
ментом служит w-р-и-транзистор, схемы базовых усилительных каскадов
приведены на рис. 1.
ОК
ОЭ
(^ н
С)
ОБ
(к
. с г
б)
а)
у
(к
в)
Рис. 1. Схемы базовых усилительны х каскадов
В зависимости от того, какой электрод транзистора является общим
для источника сигналов ис и нагрузки R H, различают схемы базовых уси­
лительных каскадов с общ и м
эмиттером (О Э ), общим коллектором
(О К ) и общей базой (ОБ). Базовые каскады играют важную роль в усили-
тельной технике. При оценке их свойств воспользуемся некоторыми све­
дениями из теории четырехполюсников.
Операция усиления, сводящаяся к изменению масштаба входного сигнала,
является линейной операцией. Усилитель может быть представлен в виде ли­
нейного активного четырехполюсника. Для описания четырехполюсника будем
использовать систему У-параметров, коэффициенты которой имеют одинаковую
размерность (проводимости), что в дальнейшем позволит получить простые
соотношения для сравнительной оценки свойств различных усилителей.
Выражения основных показателей четырехполюсника с У-параметрами как
передаточного звена были получены в параграфе 3.2 и имеют вид
где Ду — У) 1^22 _ ^12^21Соотношения (1) можно использовать для определения показателей базо­
вых каскадов, подставляя в них значения У-параметров транзистора для со­
ответствующей схемы его включения. Однако такой подход не позволяет
произвести сравнительную оценку показателей усилительных схем, по­
скольку У-параметры для схем с ОЭ, ОК и ОБ имеют различные значения. Для
сравнения свойств усилительных каскадов необходимо, чтобы их показатели
были выражены через У-параметры какой-либо одной схемы. В качестве такой
схемы выберем схему с ОЭ, т.е. выразим показатели усилителей с ОК и ОБ
через У-параметры схемы с ОЭ. Для этого найдем связь между У-параметрами
транзисторов для схем с О К и ОЭ, с ОБ и ОЭ. После подстановки найденных
взаимосвязей У0к =.Д Уоэ) и У0б = Н Уоэ) в соотношения (1) получим выраже­
ния показателей усилительных каскадов, пригодные для сравнительной оцен­
ки. Проиллюстрируем предложенный подход для схемы с ОК.
Найдем
в з а и м о с в я з ь Уок = .АТоэ)- Д ля этого, воспользо­
вавшись рис. 2,а,б, запишем исходные системы уравнений:
=> для схемы с ОЭ:
( 2)
I
- ^И.ОЭ^бэ
1/к
=
+ ^12,ОЭ^ю’
^ 2 1 .0 Э ^ б э +
^ 2 2 ,О Э ^ ю ’
для схемы с ОК:
(3)
I
= —^М.ОК^кб — ^12.0К^Дга>
~
= — ^ 2 1 ,О К ^ к б ~ ^ 2 2 .0 К ^ к :
Для транзистора между токами и напряжениями справедливы сле­
дующие соотношения (рис. 2,в):
ОЭ
к
К
У
1 k,
й. J
к
ОК
h
Ju,.=-U4
| ^6к= “ Цсб
VT
-I,
(т Ч
а)
L
к
k
d, |
б>
в)
Рис. 2. Схемы для выявления взаимосвязи между У-параметрами каскадов
с ОЭ и ОК
Воспользовавшись (4), преобразуем систему уравнений (2 ) для схемы
с ОЭ к виду (3):
=
~
~ ^ П .О Э ^ к б +
— (^ 2 1 .0 3
(^ 1 2 .0 Э +
^/| 1 . о э ) ^ Гкэ>
^ П . О э ) ^ к б — (^ 1 1 .0 3
^ 1 2 .0 3 +
^ 2 1 .0 3 +
^ 2 2 .0 э )^ к э •
Сопоставив системы уравнений (5 ) и (3), получим искомую связь ме­
жду У-параметрами транзисторов для схем с О К и ОЭ
У \ 1 .0 К =
(6 )
^ 2 1 ,0 К
^ 1 1 .0 3 ’
^ 1 2 .0 К
— — (^ 2 1 ,0 3 +
=
~ ( -^ 1 2 .0 3 +
^ 1 1 ,0 з )>
^ 2 2 .0 К
^ 1 1 .0 3 )>
=
1 .0 3 +
^ 1 2 ,0 3 +
^ 2 1 .0 3
^ 2 2 ,0 3 •
П осле подстановки (6) в (1) получим выражения основных показате­
лей для схемы с ОК. Подобным образом получены выражения основных
показателей для усилительного каскада с ОБ. Для наглядности соотно­
шения д ля основных показателей базовых усилительных каскадов, выра­
женные через Y -параметры для схемы с ОЭ, приведены в табл. 1. В даль­
нейшем индекс ОЭ в проводимостях опущен.
Таблица 1
Параметр
Ки
К,
Yn
ОЭ
ОК
Угх
Уп + К
Y21 + Y22
У22 + Ун
У^ + К
ВД
УпК+Лу
(У21+ Уп)К
УиК+Лу
(Y v + Y 22)Y„
УиК+Ау
УпК+Лу
У ^ н+ А у
Ут+ К
У22 + К
У Л г + Лу
У22К с , + \
У22 + К
у
ОБ
^22^ист +
Д у
YZ Y „ + A r
1 ВЫ Х
^ + П с т
У„ +
К
с
Т
Примечание: Ду = Г „У 22 - Г12У21; Yn = У „ + У22 + У12+ У21
Уе + К сг
Из приведенных в табл. 1 соотношений следует, что:
=> усилительные свойства и входные проводимости базовых каскадов
зависят от проводимости нагрузки Кн, а выходные проводимости — от
внутренней проводимости Уист источника сигналов;
=> паразитная обратная связь в транзисторе, обусловленная проводимо­
стью Yl2, уменьшает входную и выходную проводимости усилитель­
ных каскадов.
Известно, что для У-параметров транзистора в схеме с О Э справедли­
вы следующие соотношения:
(7 )
I У21 |»
|Уп |»
|Y22 |»
|У12 |,
где |Y |= |G + j B |= 4 G 2 + В 2 — полная проводимость, и ли модуль про­
водимости; G, В — активная и реактивная составляющие комплексной
проводимости.
В табл. 2 с учетом соотношений (7 ) приведены пределы изменения:
=> коэффициентов усиления напряжения и тока, а также входных прово­
димостей при изменении значений проводимости нагрузки от
= °°
(короткое замыкание выхода) до 7„ = 0 (отключение нагрузки);
=> выходных проводимостей при изменении значений проводимости
источника сигналов от Уист = °° (источник напряжения) д о FHCI = 0 (ис­
точник тока).
Таблица 2
у*
ik
Уи
..0
0 ... ------------1+ y22/y2I
-
( Y
Л
- ^ + 1 ...0
Y
V Ml
+
Ки
к,
ОБ
OK
ОЭ
о
Параметр
1
...0
1-+ Y22 /Y2]
Y
Увх
У,, = const
Y l " ' -2i-Y
Jl
у
21
Y
Y22 = const
Y21 '* * V22
Y 21 *'' Y11
Y
1 ВЫ Х
Y22 ’ ** -U
у -722
I 2\
Примечание: для входных и выходных проводимостей принято У. 2 = 0.
Сравнительная оценка свойств базовых усилительных каскадов.
Приведенные в табл. 2 данные с учетом соотношений (7) позволяют сделать
ряд важных выводов по оценке свойств базовых усилительных каскадов.
У си ли т ел ь н ы е
свойства.
Наилучшими усилительными
свойствами обладает схема усилителя с ОЭ, которая способна усиливать как
напряжение, так и ток. Как видно из табл. 2, при максимальном коэффициен­
те Кц коэффициент К] = 0, а при максимальном коэффициенте К[ коэффици­
ент К и =0 . Одновременное усиление напряжения (|K(J|> 1) и тока (|Ki| > 1)
достигается соответствующим выбором проводимости нагрузки.
Каскад с ОК не усиливает напряжение и имеет несколько больший
коэффициент усиления тока, чем каскад с ОЭ. Каскад с ОБ не усиливает
ток и имеет несколько больший коэффициент усиления напряжения, чем
каскад с ОЭ.
Знак минус в выражениях свидетельствует о том, что каскад с ОЭ являет­
ся инвертором напряжения, а каскады с О К и ОБ — инверторами тока, т.е.
соответственно изменяют фазу выходного напряжения и тока на 180°.
Входная
и
выходная
п р о в о д и м о с т и . Для приня­
тых условий (У )2 = 0) входная проводимость каскада с ОЭ не зависит от
проводимости нагрузки У„, а его выходная проводимость — от выходной
проводимости источника сигналов Уист. Входная проводимость усили­
тельного каскада с ОК меньше, а каскада с ОБ больше по сравнению с
входной проводимостью каскада с ОЭ. Выходная проводимость усили­
тельного каскада с ОК больше, а каскада с ОБ меньше по сравнению с
выходной проводимостью каскада с ОЭ.
Для наглядности сравнения базовых усилителей в табл. 3 приведены
параметры усилительных каскадов в предположении, что:
=> реактивные составляющие У-параметров для схемы с ОЭ равны нулю
(jB = 0), а для активных составляющих выполняются соотношения
C?2i>:> Gii » С?22> G \ 2 = 0;
=> для проводимости нагрузки и источника сигналов справедливы соот­
ношения
G 21 » GH>> G22, G „ c t » G n .
Таблица 3
Параметр
ОЭ
OK
ОБ
Ки
- G 2] / G„
1
G21 / G„
к,
^21 / Gn.03
—G 2 2 / G\ 1
-1
G ux
G,i
G 11 G J G2\,o3
G „ G21 / G u
ВU\
C 22
G 21
G 22
Как видно из табл. 3, с точки зрения усилительных свойств наилуч­
шей является схема усилителя с ОЭ, которая имеет наибольший коэффи­
циент усиления мощности, так как усиливает и напряжение, и ток. Каскад
с О К не усиливает напряжение (поэтому называется эмиттерным повто­
рителем) и имеет такой же коэффициент усиления тока, как и каскад с
ОЭ. Каскад с ОБ не усиливает ток и имеет такой же коэффициент уси ле­
ния напряжения, как и каскад с ОЭ.
Входная проводимость усилителя с ОК в \Ку,оэ I = G2\/GH раз меньше,
а входная проводимость усилителя с ОБ в K L0э = G2\/Gu раз больше по
сравнению с входной проводимостью каскада с ОЭ, что, как будет пока­
зано ниже, обусловлено наличием отрицательной обратной связи по на­
пряжению в каскаде с О К и по току в каскаде с ОБ.
Усилительные каскады с ОЭ и ОБ имеют практически одинаковые
выходные проводимости или сопротивления (значение сопротивлений
может составлять сотни килоом). Выходная проводимость каскада с О К
определяется крутизной ( 5 = G 2{) проходной характеристики транзистора,
значение которой составляет десятки мА/В. Следовательно, усилитель­
ные каскады с ОЭ и ОБ можно считать источниками тока, обладающими
высоким выходным сопротивлением, а каскад с О К — источником на­
пряжения, имеющим малое выходное сопротивление.
О б л а с т и п ри м ен ен и я б азов ы х ус и ли т ел ей . Уси ли тельн ы й к ас­
кад с О Э как уси ли тель с наибольшим усилением мощности находит
наиболее широкое применение. Помимо сам остоятельного примене­
ния каскад с О Э служ ит основой для построения дифференциальных
усилителей, получивш их широкое распространение в интегральны х
схемах.
Одна из основных областей применения каскада с О К — выходные
ступени низкочастотных усилителей радиоприемных устройств и б ы ­
товой аппаратуры, нагрузкой которых является низкоомный динамик.
Кроме этого, каскады с О К часто включают в качестве высокоомной
нагрузки усилительны х каскадов с ОЭ для повышения коэффициента
усиления по напряжению. Имея больш ое входное и малое выходное
сопротивления, каскад с О К часто используются для согласования
сопротивлений.
Основная область применения усилительного каскада с ОБ — вход­
ные усилители радиоприемных устройств, что обусловлено низкоомным
входным сопротивлением каскада. Благодаря этому свойству устойчивый
коэффициент усиления каскада в диапазоне высоких частот может пре­
восходить устойчивый коэффициент усиления каскада с ОЭ.
9.3. О б р атн ы е связи
Основные понятия и определения. В усилителях, помимо прямой связи,
благодаря которой происходит передача сигнала от источника к нагрузке с
повышением уровня мощности, существуют обратные связи (О С), обеспе­
чивающие возвращение части энергии сигнала в сторону входа усилителя.
Цепи, по которым энергия сигнала передается в обратном направлении, на­
зываются цепями обратной связи. В усилителях цепи обратных связей вво­
дят преднамеренно для изменения их свойств в нужном направлении, так как
выходной сигнал, поступающий по цепи обратной связи, служит средством
контроля состояния усилителя и позволяет целенаправленно воздействовать
на его показатели и характеристики. Таким образом, обратная связь в усили­
телях служит для самоконтроля и коррекции его работы. В дальнейшем уси­
лители или усилительные каскады, а также цепи обратных связей будем обо­
значать в виде четырехполюсников.
Для обобщенной схемы усилителя с ОС, приведенной на рис. 1, опре­
делим коэффициент передачи в комплексной форме как отношение ам­
плитуд выходного сигнала к входному:
0)
где К — коэффициент усиления усилителя без обратной связи; (3 — ко­
эффициент передачи четырехполюсника обратной связи; К и (3 являются
комплексными величинами. При выводе (1 ) использовалось очевидное из
рис. 1 соотношение: K (S m + 0 SBUX) = SBUX .
Усилитель
с
четырехпо-
люсником ОС образуют коль­
*$вх
цевую цепь, которая называ­
о ^
©
-
к
ется петлей ОС. Произведе­
ние (3К определяет коэффици-
р£в1
ент усиления сигнала по такой
петле и называется коэффи­
циентом петлевого усиления,
который может быть измерен.
рис
, Обобщенная схема усилителя
с обратной связью
Для этого по выходу четы­
рехполюсника ОС петля разрывается, четырехполюсник ОС нагружается на
сопротивление, равное входному сопротивлению усилителя, на вход усили­
теля подается входной сигнал, на выходе четырехполюсника ОС измеряется
амплитуда выходного сигнала. Петлевое усиление, взятое с обратным зна-
ком, т.е. произведение -|Ж , называют возвратным отношением. Величину
1—рА' называют возвратной разностью, которая в относительных единицах
представляет собой разность между подаваемым на вход усилителя сигна­
лом и сигналом, пришедшим на выход четырехполюсника О С при разомк­
нутой петле ОС. Как видно из (1), возвратная разность является мерой коли­
чественной оценки влияния ОС на свойства усилителя.
Основны е
классификационны е признаки
образования
ОС.
По
способу
обратной связи различают:
=> внутреннюю ОС, обусловленную физическими свойствами и особен­
ностями конструкции усилительных элементов;
=> внешнюю ОС, введенную в усилитель с помощью дополнительных цепей.
По
причинной
о бу сло вленно сти
обратной
связи
можно выделить:
=> преднамеренную ОС, предназначенную для улучшения показателей
усилителя;
=> паразитную ОС, обусловленную неудачным расположением радиоде­
талей и монтажом, наличием паразитных емкостных, индуктивных и
гальванических связей между усилительными каскадами и другими
причинами.
По с т р у к т у р е
цепей
обратные связи разделяют:
=> на однопетлевую ОС (рис. 2,а), когда цепь обратной связи вместе с частью
усилителя, которую она охватывает, образует один замкнутый контур;
=> на многопетлевую ОС (рис. 2,6), когда число петель О С превышает
единицу. Если ОС охватывает один усилительный каскад, ее называ­
ют местной ОС.
Кг
Рис. 2. Однопетлевая (а) и многопетлевая (б) обратная связь
По
спосо бу
рех п о лю сн и к а
соединения
ОС
усилителя
и
ч ет ы ­
различают:
=> обратную связь Y-muna, при которой входные и выходные цепи обоих
четырехполюсников соединены параллельно. В результате такого со­
единения образуется новый четырехполюсник, У-параметры которого
равны сумме У-параметров усилителя и четырехполюсника ОС;
=> обратную связь Z-muna, при которой входные и выходные цепи обоих
четырехполюсников соединены последовательно;
=> обратную связь Н-типа, при которой входные цепи обоих четырехпо­
люсников соединены последовательно, а выходные — параллельно;
=> обратную связь G-muna, при которой входные цепи обоих четырехпо­
люсников соединены параллельно, а выходные — последовательно.
Схемы усилителей с ОС У-, Z -, Н - и G-типов приведены ниже на
рис. 5-ь8. Вместо способа соединения усилителя с четырехполюсником
О С используются два сходных классификационных признака: способ
снятия и способ введения сигналов ОС.
/кф
°
У„
Ь '
-е-*
"
-
I
€
£ к ()
Uoc | [j] Rj
k
J
о
2,
«М
-С
(П.)
*1
Рис. 3. Виды обратной связи по способу снятия сигнала: ОС по напряжению (а);
ОС по току (б); комбинированная ОС (в)
По с п о с о б у
снятия
с и г н а л а , или схеме соединения вы­
ходной цепи усилителя, входной цепи четырехполюсника ОС и нагрузки,
выделяют три вида ОС (рис. 3):
=> обратную связь по напряжению (рис. 3,а), для которой выходная цепь
усилителя (в виде источника тока I к ), входная цепь четырехполюс­
ника ОС (R u R j) и нагрузка (У н) соединены параллельно. Для ОС по
напряжению характерны следующие признаки: при коротком замы­
кании нагрузки сигнал О С ( U K ) пропадает, а при отключении нагруз­
ки — сохраняется. Такой способ снятия сигнала реализован при ОС
У-типа (рис. 5) и Я-типа (рис. 6);
=> обратную связь по току (рис. 3,6), для которой выходная цепь усили­
теля (в виде источника ЭДС Ёк ), входная цепь четырехполюсника
ОС (Л?з) и нагрузка (Z „) соединены последовательно. Для этого спосо­
ба снятия сигнала при коротком замыкании нагрузки сигнал О С ( U ж )
сохраняется, а при отключении нагрузки — пропадает. Связь по току
используется при ОС Z-типа (рис. 7) и Н -типа (рис. 6);
=> комбинированную О С по выходу (рис. 3,в), для которой при к о­
рот ком замыкании и отключении нагрузки (Z H или YH) сигнал О С
( й ж ) сохраняет ся. При R 3 = 0 комбинированная ОС вырождается
в ОС по напряжению (рис. 3,а); при R i = °°, R j = 0 — в ОС по току
(рис. 3,6).
L
г-о-о -^ -с ь Н
н>
1
ф
------------ о-
Рис. 4. Виды обратной связи по способу подачи сигнала: параллельная О С (а );
последовательная О С (б ); комбинированная ОС (в )
По с п о с о б у
ную
цепь
введения
усилителя,
сигнала
ОС
во
в х о д ­
или схеме соединения входной цепи
усилителя, выходной цепи четырехполюсника ОС и источника сигналов,
выделяют три вида ОС (рис. 4):
=> параллельную ОС, для которой входная цепь усилителя (в виде вход­
ной проводимости Увх), выходная цепь четырехполюсника ОС (в виде
источника тока /ос) и источника входных сигналов (в виде источника
тока /и) соединены параллельно. Для параллельной ОС характерны
следующие признаки: при коротком замыкании источника сигналов
/и сигнал О С не передается на вход усилителя, а при отключении
передается. Такой способ введения сигнала обратной связи реализо­
ван при О С У-типа (рис. 5) и G-типа (рис. 8);
=> последовательную ОС (рис. 4,6), для которой входная цепь усилителя
(в виде входного сопротивления ZBX), выходная цепь четырехполюс­
ника О С (в виде источника ЭДС Ё ж) и источника входных сигналов (в
виде ЭДС Ё И) соединены последовательно. В этом случае при корот­
ком замыкании источника сигналов сигнал О С поступает на вход
усилителя, а при отключении — не поступает. Последовательная
связь используется при ОС Z-типа (рис. 7) и G-типа (рис. 8);
=> комбинированную ОС по входу (рис. 4,в), для которой при коротком
замыкании и отключении источника сигналов S',, сигнал О С Soc посту­
пает на вход усилителя. При R\ =
= О, R2 = °° комбинированная ОС
вырождается в параллельную ОС (рис. 4,а); при R , = R 3 = со, R 2 = о —
в последовательную ОС (рис. 4,6).
По с п о с о б у
суммирования
налов источника и ОС различают:
или
фазировки
сиг­
=> положительную ОС, при которой сигналы совпадают по фазе и осу­
ществляется арифметическое сложение сигналов;
=> отрицательную ОС, при которой сигналы находятся в противофазе и
осуществляется арифметическое вычитание сигналов.
Этот классификационный признак справедлив для средних частот ра­
бочего диапазона усилителя. В общем случае происходит геометрическое
сложение входного сигнала и сигнала ОС, поэтому обратная связь явля­
ется комплексной.
В л и я н и е О С на свойства уси ли телей . Рассмотрим усилители, в ко­
торых используется ОС К-, Z-, //- и G-типов при следующих допущениях:
=> матрицы обобщенных параметров усилителя без обратной связи (W ^),
четырехполюсника ОС (W p) и усилителя, охваченного обратной свя­
зью (ЛУд-ос), имеют следующий вид:
=
> п
'0
wn
•
’
w
A '.O C
=
\wu
N w.-Л
11
1
l
<N
w22_
wR
Р =
0
’;
0
_______
1
W2I
0
=> левы е зажимы цепи ОС или (3-четырехполюсника на приведенных
ниже схемах (рис. 5+8) определены как входные, при этом энергия
сигнала передается от выходных (правых) зажимов к входным, т.е. из
выходной цепи усилителя во входную.
Решим следующую з а д а ч у :
определим параметры усилителей с
обратной связью и без обратной связи и дадим их сравнительную оценку.
Решение этой задачи позволит в «ч и стом » виде выявить влияние ОС на
показатели усилителя, так как все ^-параметры Р-четырехполюсника, за
исключением W 12, приняты равными нулю и поэтому не оказывают влия­
ния на работу усилителя. При определении показателей усилителей с
обратной связью будем использовать полную матрицу 'W к.ос и снабжать
полученные выражения показателей индексами «О С ». Приняв Wi2 = О,
найдем показатели для усилителя без обратной связи. Для сравнительной
оценки выразим показатели усилителя с ОС через показатели усилителя
без ОС. Н а схемах токи и напряжения усилителя без обратной связи по­
мечены индексом «О ». Отметим также, что коэффициенты передачи (уси­
ления) напряжения и тока, W -параметры, проводимости и сопротивления
нагрузки и источника сигналов всегда считаются комплексными величи­
нами, поэтому при их обозначении (К , Р, У, Z, Н, G ) не будем ставить
сверху общепринятую точку.
Обратная
связь
У-типа
(рис. 5). Воспользовавшись соот­
ношениями (1) из параграфа 9.2, запишем выражения для усилителя с ОС:
ад
К,и, о с
y22 + yh
( 2)
y12y21
в х,О С
= YU -
Y\ 1( ^|, + Y22 )
V
1 в ы х,О С
y 22
= 1Y22 •
+ K
^12^21
ад.
Yn+Ym
Случай Y\2 = 0 соответствует показателям усилителя без О С :
к„= —
(3)
к,
y22 + yh
Y21 Yн
■> П * - г . . ;
Yu (Y h + Y 22)
y ,ых
— y 22.
С помощью (2), (3 ) выразим параметры усилителя с О С через пара­
метры усилителя без ОС:
К V, о с
= к и; k Liо с
К,
1+M w ’
(4)
^вх.ОС
ос = П * 0 + № );
\
Yвых. О С = Yвых 1+ Р,АГ, ' + Г- 1Г*
l + Y„CT/YuI У
“ П - х О + Р Д / ).
где коэффициент (3, = —Yn /У„ формально можно трактовать как коэффи­
циент
передачи
тока
четырехполюсника
ОС,
так
как
/ос = Yn u 2 = - У 12/2 / YH. Отсюда следует Р , = 1ж/12 = ~Y n /YH.
h.o~h
Л.О
ЪМл И *22
t\v„
^истП
YM
Рис. 5. Влияние вида связи У-типа на свойства усилителен
При оценке выходной проводимости необходимо иметь в виду, что
при Уист = °° или Ун = °° обратная связь исчезает (см. рис. 5). Наиболее
сильно ее действие проявляется при Ун—> 0 и Уист —> 0, поэтом у в (4) при­
ведено приближенное соотношение для случая Ун/У22< < с1 и Ую /У l ^ l -
Из выражения (4) следует, что ОС У-типа при ! 1+(ЗД/| »
1 и YKJ Y \, —»0 :
=> не изменяет коэффициента усиления по напряжению;
=> уменьшает коэффициент усиления по току;
=> увеличивает входную и выходную проводимости.
Пояснение полученных результатов. По условию подключение четы­
рехполюсника ОС к усилителю не изменяет проводимости нагрузки У,„ а
следовательно, и выходного напряжения U 2. Изменение входного на­
пряжения U l при таком подключении равносильно изменению коэффи­
циента усиления усилителя без ОС, что невозможно. Поэтому коэффици­
ент усиления по напряжению усилителя с О С равен коэффициенту уси­
ления усилителя без ОС.
Уменьшение коэффициента усиления по току усилителя с О С о бъ ­
ясняется тем, что при подключении к уси ли телю четырехполюсника
ОС напряжение U 2 = const, следовательно, /2 = /2„ = const, а через его
выходную цепь начинает протекать ток
/ос. В результате ток
/, 0
уменьшается. Д ля сохранения значения тока /, 0 = 12Л /К / = const не­
обходимо увеличить входной ток /ь что приводит к уменьш ению
К/.ос = i 21i f
Увеличение входной проводимости усилителя с ОС обусловлено тем,
что при подключении четырехполюсника О С увеличивается входной ток
/, при неизменном входном напряжении t/, = const (рис. 5).
При увеличении выходного напряжения U 2 усилителя с ОС увеличи­
вается ток /ос и при /,= const уменьшается входной ток /|0 усилителя
без ОС, что вызовет уменьшение выходного тока 12 = 120 = К [ /,0 и вы­
ходного напряжения U 2 (рис. 5). Следовательно, ОС препятствует изме­
нению выходного напряжения U 2, а это равносильно уменьшению вы­
ходного сопротивления усилителя с О С или увеличению его выходной
проводимости.
Обратная
связь
Я - т и п а . Усилитель с ОС Я-типа (рис. 6)
описывается следующей системой уравнений:
(5) [с/, = Huix+ н ]202,
[/2 = Н 2\^\+ ^22^21
Воспользовавшись системой уравнений (5), определим основные по­
казатели усилителя с ОС Я-типа. Разделив обе части второго уравнения
системы (5 ) на /2 и приняв во внимание, что Ун = - / 2/U 2 из-за выбран­
ного направления тока /2 (рис. 6), можно получить следующее соотно­
шение для коэффициента усиления по току усилителя с ОС:
(С\
1S
_ ^2 _
ОС ~
(о )
A
~
Я 21^н
H 22+Yh
Л~h,o
h.Q~h
Я,
I t/l.0
It),
( )
I Уос
Рис. 6. Влияние вида связи Н -типа на свойства усилителей
Для определения коэффициента усиления по напряжению следует:
найти из второго уравнения системы (5) ток /, и подставить в первое
уравнение;
обе части полученного соотношения разделить на U 2;
сделать замену /2 /U 2 = - Y H.
В результате получим следующ ее выражение:
(7 )
Я ,,
К,и, о с
Я п(^Н
Н Х2Н 2\
Входное сопротивление усилителя с ОС определяется из первого
уравнения системы (5 ) с учетом выражения (6 ) и соотношения
и и 2
(8)
-Yu :
;£
= я и + я 124
^
/, 12
я
„ - я Л
h 22 + y„
Д ля определения выходной проводимости усилителя с ОС будем рас­
сматривать четырехполюсник на рис. 6 со стороны выходных зажимов,
предполагая, что его нагрузкой является внутреннее сопротивление Z„CT
источника сигналов. Предварительно из первого уравнения (5 ) системы
найдем отношение U XI U 2. Д ля этого разделим обе части первого уравне­
ния системы (5 ) на £/, и, принимая во внимание, что £/, //, = - Z HCT, по­
лучим
H nz
Выходная проводимость усилителя с ОС определяется из второго
уравнения системы (5) с учетом (9 ) и соотношения [/,//[ = - Z HCT:
(Ю )
Увых,ос = у г = Н 22+ Н 2Х 4
2
^
^1
= я 22 2
7/|^
"1 1
+
'
.
ист
Приняв в (6), (7), (8), (10) значение коэффициента Я )2 = 0, получим
выражения показателей усилителя без ОС:
(11)
К , = — b i Y.» ...
Я 22+ У н
к
= --------- 111------- .
Я „ ( Я 22+ У Н)
z
= Я , ,;
УВЬ1Х= Я 22.
Использовав (6), (7), (8), (10), (11), выразим параметры усилителя с
ОС через параметры усилителя без ОС:
Ки
1+ Ри К с
( 12)
Ув ы х.О С = Увых
и лхи
V
где (3^= Я 12=
1+ ^ и ст ! Н\ 1.
/U2 (рис. 6).
При оценке выходной проводимости необходимо иметь в виду, что
при Z HCT =
или Ун = °° обратная связь исчезает. Наибольшая эффектив­
ность О С проявляется при У„ —> 0 и Z„CT —>0, поэтому в (12) приведено
приближенное соотношение для случая У„/Я22 «
1 и Zиcт/Я1, «
1.
Из выражения (12) следует, что ОС Я-типа при |1+Р(Ди| »
1 и
Z„ ct /Я 1j « 1 :
=> не изменяет коэффициента усиления по току;
=> уменьшает коэффициент усиления по напряжению;
=> увеличивает входное сопротивление и выходную проводимость. 12 = /20
Пояснение полученных результатов. Как видно из рис. 6, подключе­
ние четырехполюсника ОС к усилителю не влияет на проводимость на­
грузки Ун, следовательно, выходные токи усилителей с ОС и без ОС рав­
ны: 12 — 120 . Входной ток усилителя без ОС определяется из соотноше­
ния /, о = /2о /К/и также равен входному току /, усилителя с ОС. Поэтому
ОС Н-типа не изменяет коэффициента усиления по току.
Уменьшение коэффициента усиления по напряж ению усилителя с
О С объясняется тем, что при подключении к уси ли телю четырехпо­
лю сника ОС на его выходе появляется напряжение £/ос, которое при
неизменном входном напряжении {У, = const уменьшает напряжение U ] 0
на входе, а следовательно, и выходе усилителя: U 20 = K y U l0 = U 2. П о ­
этому коэффициент усиления по напряжению усилителя с О С Н -типа
уменьшается.
Увеличение входного сопротивления усилителя с ОС обусловлено тем,
что для сохранения входного тока постоянным /, = const при подключении
четырехполюсника ОС необходимо увеличивать входное напряжение U i .
При увеличении выходного напряжения U 2 усилителя с ОС увеличива­
ется напряжение и ж и при С/, = const уменьшается напряжение С/10 на вхо­
де усилителя (без ОС), что вызовет уменьшение выходного напряжения
U2 =
2,о=
K ]U \ n (рис. 6). Следовательно, ОС препятствует изменению
выходного напряжения U 2, а это равносильно уменьшению выходного со­
противления усилителя с ОС или увеличению его выходной проводимости.
h.o-h
(j J) 22|/|.о
\ 4.0
2ИСТ И
0 z«
Д,СТ0
UQ
\ й <к
Zp/-
Рис. 7. Влияние вида связи Z-типа на свойства усилителей
Обратная
связь
Z - т и п а . Усилитель с ОС Z-типа (рис. 7)
является дуальным по отношению к усилителю с ОС У-типа, и для опре­
деления его показателей можно пользоваться полученными выше соот­
ношениями, заменив в них У-параметры на Z-параметры, токи на напря­
жения, напряжения на токи, а проводимости на сопротивления. Поэтому
на основании (4), (3 ) соотношения взаимосвязи между основными пока­
зателями усилителей с ОС Z -типа и без ОС имеют следующий вид:
к„
К / ,о с = К
(13)
К ,
■^ВХ.ОС -
2 ВХ
(l + РиК и У,
1+ Р ^
Z в ы х.О
ПГ
= Z вых \ + % к (
С
1+ Z „ / Z
1+ z ,
/Z,11
^ Z m 0 + ^ u K u ),
где К,, К и, Zsx, Z,
параметры усилителя без ОС; Р и — коэффициент
передачи по напряжению четырехполюсника ОС:
z 21z H
Ки =
7 22 т+ 7
^
Z |, ( Z 22 + Z J
(14)
= ^ 22;
Н
РУ = - -
При оценке выходного сопротивления необходимо иметь в виду, что
при Z„CT= оо или ZH= оо обратная связь исчезает. Наибольшая эффектив­
ность ОС проявляется при Z„—>0 и Z„CT—>0, поэтому в (13) приведено при­
ближенное соотношение для случая Z„/Z22« 1
Из выражения (13) следует, что ОС
и Z HCT/ZU« \ .
Z -типа при ll+ P f/ A T ^ »!
и
^ист / Z „ « 1:
=> не изменяет коэффициента усиления по току;
=> уменьшает коэффициент усиления по напряжению;
=> увеличивает входное и выходное сопротивления.
^1.0 j
Ш
гистП I
о
G|2/2
ф
Рис. 8. Влияние вида связи G-типа на свойства усилителей
Обратная
связь
G -типа.
Усилитель с ОС G-типа (рис. 8)
является дуальным по отношению к усилителю с О С Я-типа, и для опре­
деления его показателей можно пользоваться полученными выше соот­
ношениями, заменив в них Я-параметры на G -параметры, токи на напря­
жения, напряжения на токи, проводимости на сопротивления, сопротив­
ления на проводимости. Поэтому на основании (12), ( И ) соотношения
взаимосвязи между основными показателями усилителей с ОС G -типа и
без ОС имеют следующий вид:
Кц.ос ~ К и ;
^ 1.ос
К,
1 +р/Л :/
' вх0С
(15)
/
вых.ОС
_7
1+ Z„ /G
вых
1+Р/К,
i + П сг/ е,,.
где Кц, К/, Yex, ZBbIX — параметры усилителя без ОС; Р/ — коэффициент
передачи по току четырехполюсника ОС:
G u (G 22 + 2 н)
— G 22;
(37 —G n .
При оценке выходного сопротивления необходимо иметь в виду, что
при Уист = °° или ZH= °о обратная связь исчезает. Наибольшая эффектив­
ность ОС проявляется при У„„ —> 0 и Z „ - > 0, поэтому в (15) приведено
приближенное соотношение для случая ZH/G22 « 1 и YW
J G \ \ «\ .
Из
выражения (15)
следует, что ОС
G-типа при
|1+РД/|»1
и
Уж Ю и « \ \
=> не изменяет коэффициента усиления по напряжению;
=> уменьшает коэффициент усиления по току;
=> увеличивает входную проводимость и выходное сопротивление.
В лияние отрицательн ой О С на другие показатели усилителей.
При отрицательной О С выражение (1) для коэффициента передачи уси­
лителя принимает вид
Как видно из (17), при (ЗА'] »
коэффициент передачи усилителя, ох­
ваченного отрицательной ОС (О О С), равен 1/(3 и свойства усилителя
полностью определяются свойствами четырехполюсника ОС. Эта осо­
бенность усилителей с О О С широко используется при построении узлов
различного функционального назначения на основе операционных уси­
лителей [28, 38]. Воспользуемся выражением (17) для оценки некоторых
свойств усилителей с ООС.
Н е с т а б и л ь н о с т ь
коэффициента
у с и л е н и я . Д о­
пустим, что нестабильность коэффициента усиления усилителя без ОС
составляет dK/K. Для оценки нестабильности усиления усилителя с ООС,
воспользовавшись (17), найдем дифференциал функции K0C= F (K ):
Разделим левые и правые части (18) на левые и правые части (17):
d K 0C
1
dK
К ос
1+ р *
К
Из полученного соотношения видно, что относительная нестабиль­
ность коэффициента усиления усилителей с ООС в 1+(ЗАГ| раз меньше,
чем усилителей без ОС.
Ширина
полосы
п р о п у с к а н и я . Допустим, что частот­
ная характеристика усилителя без ОС описывается следующим выражением:
(19)
К
к
К = К (]ш ) = ----- -— = ------- ------ exp(-/arctg ют),
1+ j сот
где т = const.
Определим полосу пропускания усилителя как максимальную частоту, на которой модуль коэффициента усиления уменьшается в л/2 раз.
Из (19) находим сотах = 1/х. После подстановки (19) в (17) получим час­
тотную характеристику усилителя с ООС:
( 20 )
/
\
СОТ
К о / (1 + Р о *о )
Из (20) находим полосу пропускания для усилителя с ООС:
(21) “ мах =-1--— ° А'0 = ( l + ft0£ 0)comax,
т
Р0 = const,
Как видно из (21), полоса пропускания усилителя с О О С в 1+(Зо^о раз
шире полосы усилителя без обратной связи. Однако, как видно из рис. 9,
расширение полосы пропускания усилителя с ООС достигается ценой
уменьшения коэффициента усиления.
1*1
*0
1+Ро/ч>
^гпах
^МАХ
(О
Рис. 9. Влияние отрицательной обратной связи
на полосу пропускания усилителя
Нелинейные
и с к а ж е н и я . При больших амплитудах вход­
ного гармонического сигнала из-за нелинейности характеристик усили­
тельных элементов наблюдается искажение формы выходного сигнала,
которое проявляется в наличии высших гармоник напряжения (тока) на
выходе усилителя. Выявим влияние О О С на коэффициент гармоник в
предположении, что:
=> коэффициент усиления К<} усилителя без ОС и коэффициент передачи
Ро четырехполюсника ОС являются вещественными числами;
=> выходной сигналя s2( () усилителя без ОС (рис. 10,а) равен сумме уси­
ленного входного гармонического сигнала и и-й гармоники:
s2(t ) = К 0 .V|(/) + s,(!) = K 0Si cos (соЖр) + S„ cos пШ.
В этом случае коэффициент гармоник усилителя без ОС определяется
следующим отношением:
(22)
kr = S J ( K 0St).
Рис. 10. Влияние отрицательной обратной связи на нелинейные искажения
Найдем коэффициент гармоник усилителя с ООС (рис. 10,6) при сохра­
нении условий работы усилителя К 0. Для этого увеличим амплитуду входно­
го сигнала в 1 + Р0АГ0 раз, чтобы получить одинаковыми и равными KoS\ ам­
плитуды выходного сигнала при отключенном (рис. 10,а) и подключенном
(рис. 10,6) четырехполюснике ОС. Воспользовавшись рис. 10,6, запишем
следующее соотношение:
^2, о с ( 0 = [ ( 1 + Р о £ о ) Ы О - Ро *^2,ос(0] К о + s r( 0 .
из которого находим
s 2, o c ( 0 =
S i M + s r( t ) / ( 1 + Р о ^ о ) =
= K 0Si cos (ш/+ф) + S J { 1+ р(,А'о)х cos пШ.
Из полученного выражения находим коэффициент гармоник усилите­
ля с ООС, которое с учетом (22) запишем в следующем виде:
(23)
£г 0С= -------- ^
^
г0С
а д а + РоК,,)
---- .
1+ Р Л
Как следует из (23), коэффициент гармоник при введении ООС
уменьшается в 1 + РоАТ(|раз.
9.4. П ринципы построения у с и л и те л ь н ы х схем
С труктуры входных и выходных цепей уси ли телей . Принципы со­
ставления входных и выходных цепей усилителей рассмотрим на приме­
ре базовых усилительных каскадов, использующих в качестве усилитель­
ных элементов биполярные транзисторы и один источник питания. При
этом будем иметь в виду, что:
=> входная цепь содержит:
•
источник усиливаемых сигналов;
•
источник смещения (постоянного напряжения или тока), который
задает требуемый режим работы транзистора в состоянии покоя,
или положение рабочей точки на семействе его вольт-амперных
характеристик;
•
переход база — эмиттер транзистора;
=> выходная цепь содержит:
•
источник питания в виде источника постоянного напряжения,
обеспечивающего повышение уровня мощности входного сигнала;
•
нагрузку как потребитель мощности выходного сигнала;
•
пром еж ут ок коллектор — эмиттер транзистора, выполняющего
функции источника выходных сигналов;
=> постоянные напряжения на коллек­
торе и базе по отношению к эмитте-
п-р-п
ру биполярных транзисторов в ре-
ник смещения строится на основе
о-
?+
жиме усиления имеет одинаковую
полярность (рис. 1), поэтому источ­
р-п-р
"/ „о
J
+ о— *— Г
источника питания усилителя;
До
/бО
VT
- О— Ч
Г VT
/
Чо
=> для токов транзистора выполня-
эО
Ag
АО
ется соотношение /э0 = /к0 + /б0
(рис. 1), которое следует учиты-
Рис. 1. Полярность напряжений
вать при подключении к транзи............. „
стору источников питания и сме-
и напРавления токов
в биполярных транзисторах
г
г
к
а)
б)
щения в усилительных каскадах с ОЭ, ОБ, ОК.
Каскад
с
О Э . Схемы входных и выходных цепей усилительно­
го каскада приведены на рис. 2. При составлении последоват ельной схе­
мы входной (базовой) цепи (рис. 2,а ) источник смещения Е§, источник
сигналов ис и переход база — эмиттер транзистора соединяются последо­
вательно. При этом источник смещения Eg должен пропускать ток сигна­
ла г'б~, а источник сигналов ис— постоянный ток /go. В параллельной схе­
ме входной цепи (рис. 2,6) источник постоянного тока /go, источник сиг­
налов гс и промежуток база — эмиттер транзистора соединяются парал­
лельно, причем ток от каждого источника гс и /go должен протекать толь­
ко через переход база — эмиттер транзистора.
Рис. 2. Структуры входных (а, 6) и выходных (в, г) цепей
в усилительном каскаде с ОЭ
Выходные (коллекторные) цепи усилительного каскада с ОЭ, содер­
жащие источник питания, нагрузку и промежуток коллектор
эмиттер
транзистора, также строятся по последовательной (рис. 2,в ) и параллель­
ной (рис. 2,г ) схемам. При этом в последовательной схеме сопротивления
источника коллекторного напряжения Е к для токов сигнала и нагрузки
для постоянного тока должны быть близки к нулю; в параллельной схеме
ток /к0 от источника питания должен протекать только через транзистор, а
ток сигнала гк_— через транзистор и нагрузку У„.
Каскад
с
О Б . Отличительной особенностью входных цепей
(рис. 3,а,б) является то, что источники смещения £g и /g0 включены меж­
ду базой транзистора и общей точкой схемы. Такое включение позволяет
реализовать источники смещения с помощью источника питания усили­
теля. В последовательной схеме (рис. 3,а) сопротивления источника сиг­
налов ис и смещения £g для переменного и постоянного токов должны
иметь значения, близкие к нулю. Если внутреннее сопротивление источ­
ника напряжения смещения Е g велико, то между базой транзистора и о б ­
щей точкой источника сигналов и нагрузки включается блокировочный
конденсатор С6, обладающий малым сопротивлением переменному току.
В параллельной схеме база транзистора должна быть соединена с общей
точкой через конденсатор Cg, а эмиттер — через сопротивление Z, про­
пускающее постоянный ток.
Выходные цепи усилительного каскада с ОБ составляются по последо­
вательной (рис. 3,в) или параллельной (рис. 3,г) схемам. Постоянный /ко и
переменный гк_ токи выходной цепи в схеме с ОБ протекают также через
входную цепь усилителя, обладающую некоторым сопротивлением Z.
Усилительные каскады с ОЭ и ОБ находят применение в качестве усили­
телей высокой частоты (У В Ч ) радиоприемных устройств (см. п. 9.7). И с­
пользование во входных и выходных цепях У В Ч колебательных контуров,
имеющих практически нулевое сопротивление постоянному току, позволяет
организовать последовательное питание базовых и коллекторных цепей
транзисторов (рис. 2,а,в и рис. 3,а,в).
.Q
Рис. 3. Структуры входных (а, б) и выходных (в, г ) цепей
в усилительном каскаде с ОБ
Каскад
с
ОК
применяются в качестве широкополосных усилите­
лей с резистивной нагрузкой. По этой причине его входные и выходные цепи
строятся по параллельной схеме. Входная цепь (рис. 4,а) представляет собой
параллельное соединение источника сигналов /с, источника постоянного тока
^60 для получения требуемого смещения рабочей точки и перехода база —
эмиттер транзистора, последовательно с которым включены элементы вы­
ходной цепи, обозначенные как сопротивление Z. Выходная цепь каскада с
ОК (рис. 4,6) имеет такую же структуру, как и каскада с ОЭ.
|й
I !
1ъо
0.
Г '--
г
к
’/«0
^п
; U
у
1|^5э0
а)
Рис. 4. Структуры входных (а, б)
и выходных (в, г) цепей
в усилительном каскаде с ОК
Рис. 5. Подача смещения
с фиксированными током (а)
и напряжением (б)
О сновны е способы подачи смещ ения на базу. Одним из основных
факторов, влияющих на качественные показатели усилителя, является
режим по постоянному току, который определяется током покоя выход­
ной цепи усилителя 1К0 или /,0 и задается током или напряжением смеще­
ния в базовой цепи. Принципы построения цепей, обеспечивающих ре­
жим работы транзистора по постоянному току, рассмотрим на примере
усилительного каскада с ОЭ. Схемы на рис. 5 иллюстрируют два про­
стейших способа подачи смещения на базу транзистора. В схеме на
и*
рис. 5,а ток смещения /go ~ E J R-в определяется сопротивлением Rf„ так
как сопротивление перехода база — эмиттер R§ ,«
R&. Если в схеме на
рис. 5,6 использовать низкоомный делитель напряжения, составленный
из сопротивлений Rgt, R,-,2 , то напряжение между базой и эмиттером тран­
зистора С/бэ0 = E KR 62/{Rm + Rep.)- Первый способ подачи смещения называ­
ется смещением фиксированным током базы, второй способ
смещени­
ем фиксированным напряжением база — эмиттер. Оба способа не по­
зволяют получить постоянства коллекторного тока /ко (или постоянства
положения рабочей точки на вольт-амперных характеристиках транзи­
стора) при воздействии различных дестабилизирующих факторов (раз­
брос параметров транзисторов, изменение напряжения питания, темпера­
туры и др.).
Способы стабилизации режима по постоянному току. Для умень­
шения пределов изменения тока покоя в транзисторах широкое распро­
странение получили два способа стабилизации, основанных на использо­
вании отрицательной обратной связи.
На рис. 6,а приведена с х е м а
лизации
коллек торной
ст аби­
тока покоя /ко, в которой используется отрицательная об­
ратная связь по напряжению, реализуемая с помощью резистора Rб. При
выявлении стабилизирующих свойств схемы будем полагать, что коллек­
торный ток значительно превышает ток базы (/ко »
/бо)> а сопротивление
R6— сопротивление перехода база — эмиттер (R (,»
/?<-, ))■ Допустим, что
коллекторный ток /ко увеличился, тогда:
=> увеличится падение напряжения на резисторе R K, равное произведе­
нию R K/к0;
=> уменьшится напряжение U K30 = Е к- RK/ко;
=> уменьшится ток базы /бо = U Kэ0/ R„.
При уменьшении /ко ток базы /бо будет возрастать. Следовательно, в
обоих случаях /б0 изменяется так, что препятствует изменению /к0. Для
повышения стабильности необходимо увеличивать соотношение RJReHa рис. 6,6 приведена
зации
схема
эмиттерной
ст а б и л и ­
тока покоя 1Ко, в которой используется отрицательная обратная
связь по току, реализуемая с помощью резистора R,. При выявлении стаби­
лизирующих свойств схемы будем полагать, что коллекторный ток значи­
тельно превышает ток базы (I ^ »
/во), а напряжение на базе Ua) = const.
В этой схеме при увеличении 1Ко :
=> возрастает напряжение на эмиттере СДо, равное произведению R, 1Ко;
=> уменьшается напряжение на переходе база — эмиттер 115э0 = С/бо ~ ^Ло-
При уменьшении /к0 напряжение на переходе база — эмиттер С/6э0 б у­
дет возрастать. Следовательно, в обоих случаях (Убэо изменяется так, что
препятствует изменению /к0.
Коллекторная стабилизация действует только при наличии в коллек­
торной цепи резистора, обеспечивает меньшую стабильность режима по
сравнению с эмиттерной стабилизацией и, кроме того, снижает входное
сопротивление усилителя.
Следует отметить, что стабилизирующие свойства рассмотренных
схем проявляются и на переменном токе, поскольку отрицательная о б ­
ратная связь обусловлена резисторами Rg, /?э и действует на всех часто­
тах. Поэтому стабилизация режима по постоянному току сопровождается
уменьшением коэффициента усиления. На рис. 6,в и г приведены схем­
ные решения, свободные от указанного недостатка. В схеме на рис. 6,в
цепь отрицательной обратной связи по постоянному напряжению состав­
лена из двух резисторов Л 6ь Ra- Конденсатор С, подключенный между
точкой соединения резисторов и общей точкой схемы, разрывает обрат­
ную связь для сигнала, если сопротивление конденсатора выбрано малым
для всех частот сигнала. В схеме на рис. 6,г конденсатор Сэ подключен
параллельно резистору /?,. Если сопротивление конденсатора для частот
сигнала имеет значение, близкое к нулю, то отрицательная обратная связь
для сигнала отсутствует. Таким образом, увеличение коэффициента дос­
тигается благодаря тому, что с помощью конденсаторов устраняется от­
рицательная обратная связь для сигнала.
Рис. 6. Схемы стабилизации: коллекторная (а ) и эмиттерная (а )
стабилизация тока покоя; стабилизация с использованием
сохранением усилительных свойств (в, г )
Для усилительных каскадов с ОБ и О К схемы по постоянному току
имеют такую же структуру, как и для рассмотренного усилителя с ОЭ.
В качестве примера на рис. 7 изображена схема, которая может быть ис­
пользована в качестве каждого из трех указанных выше усилительных
каскадов. Тип усилителя определяется выбором общей точки по высокой
частоте для источника сигналов и нагрузки, а также выбором точек входа
и выхода усилителя, при этом:
=> для каскада с ОЭ общая точка 3, вход точка 1, выход точка 2;
=> для каскада с ОБ общая точка 1, вход точка 3, выход точка 1;
=> для каскада с О К общая точка 2, вход точка 1, выход точка 3.
Рассмотренные способы коллекторной и эмиттерной стабилизации, в
основе которых лежит использование отрицательной обратной связи,
обеспечивают постоянство режима при воздействии различных дестаби­
лизирующих факторов. Для стабилизации режима транзисторов по по­
стоянному току при изменении только температуры используются спосо­
бы температурной компенсации, в основе которых лежит зависимость от
температуры полупроводниковых диодов, термисторов и других элемен­
тов. В схеме на рис. 8 используется полупроводниковый диод VD, кото­
рый совместно с резистоо +£к
“ О +£„
ром R6 образует делитель
напряжения. Известно, что
Вых
с повышением температу­
ры ток /ко покоя транзисто­
VD
ра увеличивается, а сопро­
тивление диода уменьша­
Рис. 7. Обобщенная
схема усилительного
каскада
Рис. 8. Стабилизация
режима транзистора
по постоянному току
способом температурной
компенсации
ется. Протекающий через
диод ток практически не
зависит от температуры и
сопротивления
диода
и
определяется отношением
E k/R5. Поэтому с повышением температуры падение напряжения на дио­
де, прикладываемое к переходу база — эмиттер транзистора, уменьшает­
ся, что будет препятствовать росту тока /ко- При этом возможно даже
уменьшение тока /ко с ростом температуры.
Организация межкаскадных связей. Вопрос соединения отдельных кас­
кадов друг с другом касается не только усилителей, но и других узлов элек­
тронной аппаратуры, поэтому рассмотрим его с общих позиций. Для передачи
сигнала от источника на вход функционального узла и с выхода узла на вход
следующего узла или в нагрузку используют схемы межкаскадной связи, ко­
торые одновременно могут служить для подачи питающих напряжений на
электроды транзисторов. Следует выделить два вида межкаскадных связей:
=> непосредственная (прямая или гальваническая) межкаскадная связь, при
которой электроды транзисторов отдельных каскадов связаны друг с дру-
гом по постоянному току непосредственно или через резистор. Основ­
ным достоинством такой связи является способность каскадов переда­
вать сколь угодно медленные изменения входного сигнала. К недостат­
кам следует отнести трудности задания и поддержания требуемого ре­
жима по постоянному току транзисторов, дрейф нуля, трудности по­
строения схем с одним источником питания и др. Непосредственная
связь используется в полупроводниковых интегральных схемах;
=> связь с разделением отдельных каскадов по постоянному току, осу­
ществляемая с помощью конденсаторов или трансформаторов. Д о с ­
тоинство такой связи состоит в том, что каскады разделены по по­
стоянному току, что облегчает выбор требуемого режима работы каж­
дого каскада и исключает их взаимное влияние друг на друга. Кроме
того, при использовании индуктивных разделительных элементов су­
ществует возможность организации последовательного питания базо­
вых и коллекторных цепей транзисторов, являющихся более эконо­
мичными в энергетическом отношении, чем резисторные цепи парал­
лельного питания. Недостатки межкаскадной связи с разделением
каскадов обусловлены необходимостью использования элементов, ко­
торые не вписываются в технологические процессы изготовления ин­
тегральных схем. Поэтому такой способ межкаскадной связи реализу­
ется лиш ь в гибридных микросхемах с применением в качестве разде­
лительных элементов бескорпусных конденсаторов.
Изложенные в этом параграфе принципы построения усилительных
схем проиллюстрированы в дальнейшем при рассмотрении конкретных
типов усилителей.
9.5. Д и ф ф е р ен ц и ал ь н ы е у с и л и те л ь н ы е каскад ы
О причине применения дифференциальных усилителей. Применение по­
лупроводниковых интегральных схем (И С ) в качестве элементной базы радио­
электронной аппаратуры повлияло на схемные решения усилителей, что свя­
зано с требованием реализации непосредственной (гальванической) связи ме­
жду отдельными каскадами. Одной из важных проблем, с которой приходится
сталкиваться при построении усилителей с непосредственной связью, является
дрейф. Под дрейфом понимают изменение постоянного напряжения (тока) в
каскадах усилителя при отсутствии входного сигнала (в состоянии покоя),
обусловленное непостоянством температуры окружающей среды, напряжения
питания и другими дестабилизирующими факторами. Дрейф зависит от коэф­
фициента усиления усилителя и приводит к искажению выходного сигнала.
Одной из мер борьбы с дрейфом в усилителях постоянного тока явилось ис­
пользование дифференциальных усилительных каскадов. В интегральной схе­
мотехнике их роль значительно возросла благодаря:
=> идентичности параметров транзисторов дифференциальной пары,
обусловленной расположением транзисторов на одной подложке в
непосредственной близости друг от друга и изготовлением в едином
технологическом цикле;
=> возможности использования транзисторного генератора стабильного
тока (ГС Т), или токопитающего каскада, в эмиттерной цепи диффе­
ренциальных каскадов вместо резистора с большим сопротивлением,
требующего значительного повышения напряжения источника питания.
П ринципы построения диф ф еренциальных уси ли телей . Для борь­
бы с дрейфом можно использовать два идентичных усилителя, подклю­
чив нагрузку к их выходам. Такое техническое решение с использовани­
ем двух каскадов с ОЭ приведено на рис. 1. Будем рассматривать дрейф
как результат воздействия двух синфазных сигналов Uc на базы транзи­
сторов. Как видно из рис. 1,а, при идентичных параметрах усилительных
каскадов дрейф напряжения в нагрузке R„ отсутствует, так как напряже­
ния на коллекторах транзисторов VT\ и УТ2 равны и их разность равна
нулю. Однако незначительные отклонения параметров усилителей при­
водят к появлению дрейфа. Уменьшить влияние отклонения параметров
усилителей на величину дрейфа можно путем включения двух одинако­
вых
по
номиналу резисторов
R3 в эмиттерные
цепи
транзисторов
(рис. 1,6). В этом случае коэффициент передачи синфазных сигналов
усилителей уменьшится в R K/(R3+ R K) раз, уменьшатся значения синфаз­
ных сигналов на коллекторах транзисторов, а следовательно, и их раз­
ность или величина дрейфа. Так как напряжения на эмиттерах транзисто­
ров V T 1 и VT2 равны, эмиттеры можно соединить (пунктир на рис. 1,6) и
вместо двух резисторов R 3 использовать один (рис. 2,а).
При подаче на базы транзисторов VT\ и VT2 одинаковых по амплитуде
противофазных сигналов U„ (рис. \,в) напряжение на нагрузке R„, пред­
ставляющее собой разность напряжений на коллекторах, в два раза пре­
вышает напряжение на нагрузке для схемы с ОЭ. Поскольку в этом слу­
чае токи по резисторам R 3 протекают в разных направлениях, объедине­
ние R-, приведет к тому, что переменное напряжение на эмиттерах тран­
зисторов будет равным нулю. П о этой причине для противофазных сиг­
налов отрицательная обратная связь отсутствует и сохраняется ко-
эффициент усиления, т.е. включение в эмиттерную цепь резистора не
влияет на усилительные свойства противофазных сигналов.
Рис. 1. Принцип построения и свойства дифференциального каскада
Схема на рис. 2,а, полученная в результате принятых мер по борьбе с
дрейфом, представляет собой простейший вариант дифференциального
усилительного каскада. Для повышения степени подавления синфазного
сигнала (помехи) резисторы усилителя
удовлетворяют соотношению
R~JRK » 1 . Поэтому суммарный ток /0, протекающий через транзисторы
VT| и V T2, определяется сопротивлением R 3. На схемах дифференциаль­
ных усилителей часто резистор R 3 вместе с источником питания Е„ заме­
няют идеальным источником тока/0(рис. 2,6).
Передаточные характеристики. Характеристики в виде зависимо­
стей коллекторных токов /к1, /к2 транзисторов VT\ и VT2 от разностного
(дифференциального) напряжения между их базами называют переда­
точными, или проходными вольт-амперными характеристиками диффе­
ренциального каскада (Д К). Определим передаточные характеристики
ДК, схема которого изображена на рис. 2,6. Как видно из схемы:
Выражение (1 ) можно переписать в виде двух соотношений:
( 2)
Д2 =
Л .=
1+ Лг /Д.
В активном режиме работы транзисторов для определения эмиттерных токов можно пользоваться следующими соотношениями:
(3 )
/э, - /„,ехр
Ur,
Кг = 7п2ехР
Фт
Фт
где /п1 = /п2 = /„ — ток покоя транзисторов при £/бэ = 0, практически рав­
ный току обратно смещенного /т-и-перехода; фт = kT/q — тепловой по­
тенциал, равный контактной разности потенциалов фк при отсутствии
внешнего напряжения; & — постоянная Больцмана; Т — абсолютная тем­
пература; q — заряд электрона (фт= 25 мВ при Т = 300 К).
Подставляя (3 ) в (2 ) и имея в виду, что коллекторный ток 1К= а о /э, по­
лучаем после преобразований следующие выражения для передаточных
характеристик ДК:
U диф
: 0,5а 0/0 1 -th 2фт
U диф
/к1 = 0,5а0/0 1+ th2ФТ
(4 )
Ufo2, «о = 0,97 + 0,99— коэффициент передачи тока эмиттера.
где £/диф С/бэ,
Взяв производную выражений (4 ) по
4
—
—
C/диф, получим крутизну передаточных ха­
1-
рактеристик в виде следующей функции:
0 ,5 :
(5 )
Г-б
1
-4
1
-2
(
2
4
Umф
\s\
0,25ао/о
S = S, = - S 2 = ------ ^ ----- 0 0 ,
•
ФтсЬ
/Фт)
Из (5) следует, что максимальное по
модулю значение крутизны составляет (при
Ц * ф = 0 ) |5|тах= 0 ,2 5 а 0/0/Фт.
Передаточные характеристики и зависи­
мость крутизны от дифференциального на­
пряжения в нормированном виде представле­
ны на рис. 3, где обозначено /к = /Дао/о);
Рис. 3. Передаточные
характеристики
дифференциального каскада
с/диф =[/д„ф/Фт; 15 1 = |s |/|s |тах.
Полученные результаты позволяют сде­
лать ряд важных выводов:
=> наилучшие условия для усиления сигналов
соответствуют рабочей точке на передаточной характеристике Um$ = 0,
в окрестностях которой передаточные характеристики наиболее линейны и
имеют максимальную крутизну. Для создания такого режима необходимо
подать равные постоянные напряжения на базы обоих транзисторов;
=> возможны два способа регулирования усиления: смещением рабочей
точки на передаточной характеристике и изменением тока /0. Второй
способ является более предпочтительным;
=> нелинейность передаточных характеристик свидетельствует о воз­
м ож ност и использования Д К для нелинейных преобразований анало­
говых сигналов (перемножения сигналов, детектирования, умножения
частоты и др.), о чем пойдет речь ниже;
=> ярко выраженные участки насыщения и отсечки в передаточных характе­
ристиках при незначительных входных напряжениях |t/диф! > 4фт = 100 мВ
позволяют использовать дифференциальный каскад в качестве эффектив­
ного ограничителя амплитуд, а также в импульсных и логических схемах.
Генераторы стабильного тока (Г С Т ). Выше была установлена важная
роль, которую играет в ДК источник, или генератор тока /0. Совокупность
источника напряжения Еп и резистора R, с большим значением сопротивле­
ния в качестве источника тока применяется редко. Это обусловлено тем, что
такой способ построения источника тока связан с большой площадью под­
ложки, занимаемой резистором, и требует источника питания с повышенным
напряжением. В интегральных схемах источники тока строятся на транзи­
сторах. При этом используется то обстоятельство, что транзистор в схемах с
ОЭ и ОБ обладает различными значениями сопротивлений переменному и
постоянному токам: высоким (порядка сотен килоом) выходным сопротив­
лением по переменному току и небольшим сопротивлением по постоянному
току, благодаря чему не требуется высоковольтный источник питания.
Рассмотрим особенности реализации и основные свойства генератора
стабильного тока, схема которого приведена на рис. 4,а. Допустим, что
ток /go в базовой цепи транзистора VTn равен нулю. Тогда, в силу того,
что транзистор VT\ в диодном включении подсоединен к базе транзистора
VT0, должно выполняться следующее соотношение:
Из рис. 4,а видно, что ток 1\ равен
E -U ,
>+Е
?+Е
?+Е
R
?+£„
<?
Л
h
1
h\
^6ii
/к ,
/о
VT,
VT,
VT,
а)
НйVT7
VTa
VT0
'
б)
f a
*
в)
Рис. 4. Схемы генератора стабильного тока
Подставим 1\ (8) в (7):
^ U M + R XE
(9 )
R + R,
j T
6
Используя (9), определим температурный коэффициент тока /0:
(Ю )
R
d U d U *
тк/0 = ^ = —
dt"
df
Rn R + Rx dt
где при взаимном согласовании транзисторов
dU,
Rq R + R x
dUR
■= k = -2,5 mB/°C.
df
dt°
Воспользовавшись зависимостями (3) для рассматриваемого случая, за­
пишем разность напряжений между базами транзисторов VT\ и УТц в виде
(11)
Д U 6 = U 6 ]- U m =<p,
/
I Л
(
I
I \
I
— -In —
= ф т In— - I n —
= Фт1п—- ,
^nl
Art J
I h
AiO )
h
так как при одинаковых площадях транзисторов разность A U 6 за счет раз­
личных токов утечки /п), /п0 не превышает 0,5 мВ.
П осле подстановки (11) в (7 ) получим соотношение, связывающее ток
/i с током /0:
(12)
г _= Ф
/0
^ ц1 п - ^ + А /
R0 h
R0
Из (12) следует, что:
ток /0 токопитающего каскада зависит от температуры фт = кТ/q и со­
отношения сопротивлений R\/R0- При заданных /ь R\ путем выбора R0
можно изменять /0в пределах 2+3 декад [49];
при равенстве сопротивлений R\ = R0 выполняется равенство токов
1\ = /0 (так как In I ] l l 0 = 0), т. е. транзистор VT0 является «зеркалом » для
тока 1\, отображая лю бы е его изменения в собственном токе /0.
В частном случае R t = R q = 0 схема генератора тока принимает более
простой вид (рис. 4,6). Дадим оценку зеркальных свойств этой схемы.
Критерием качества выберем коэффициент передачи К = /0//|. Ток Л
складывается из трех токов:
(13)
/( - /к1+ / 61+ / б0 - /0
1
1
1
5 + (3,5 + Р0
где /0 = /ко — ток генератора стабильного тока (Г С Т ), или коллекторный
ток транзистора VT0; 8 = /Ko//Ki соотношение токов, определяющееся раз­
бросом геометрических размеров транзисторных структур; р(| =
/к(,//бо,
Pi = /Ki//6i коэффициенты усиления коллекторного тока транзисторов.
Если 8 = 1, Ро = Pi = р »
1, то из (13) находим показатель качества
«зеркального» отражения схемы
(14)
К = 10/1{ = 1/(1 +2/(3) = 1 - 2/р,
т.е. /0практически повторяет ток I s.
В ряде случаев получение требуемого значения тока /0 достигается из­
готовлением транзисторов УТ0 и VT\ с различными площадями эмитте­
ров, в результате чего изменяется отношение токов покоя /„i//no, появля­
ется разность AUfo (11), приводящая к изменению /0. Такая мера норми­
рования /0 позволяет уменьшить номинал резистора R \ или полностью
исключить его из схемы на рис. 4,а.
На рис. 4,в приведена схема токопитающего каскада, достоинством
которой является то, что транзистор УТп не входит в насыщение даже при
малых значениях напряжения на коллекторе. Это обусловлено наличием
отрицательной обратной связи, которую обеспечивает транзистор VT\.
С помощью резистора R устанавливается напряжение U&\ на базе транзи­
стора VT\. Значение тока /0 определяется по формуле /и = U ^ / R q. Такой
токопитающий каскад используется в схемах с низковольтным (2-ьЗ В)
питанием.
В приведенной на рис. 4,г схеме ГСТ, так же как в схеме на рис. 4,6, базы
транзисторов УТ0 и VT\ соединены друг с другом, отличие проявляется в том,
что между коллектором и базой транзистора VT\ вместо перемычки включен
транзистор VTi по схеме с ОК. Для этой схемы К = I<JI\ ~ 1 - 2/Р", т.е. исполь­
зование дополнительного транзистора улучшает зеркальные свойства (14).
П рим ер схемного реш ения ди ф ф ерен ц и аль н ого каскада с Г С Т .
На рис. 5 приведена схема, иллюстрирующ ая возможности реализации
дифференциального каскада. В отличие от ранее рассмотренных схем
его питание осуществляется от двух отдельны х источников напряже­
ния с разной полярностью. Непосредственно дифференциальный кас­
кад выполнен на основе рассмотренного выше принципа (рис. 2) и
дополнен
потенциометрическими
делителями напряжения ( Л ь # г) в
базовых цепях транзисторов
ВыХ|
-о
ВЫХ2
о
VT\,
VT2 для создания требуемого ре­
жима по постоянному току и рези­
V
,
T'
L-czD-f-cm-l f
сторами R 3, включенными в эмиттерные цепи для линеаризации пе­
редаточной характеристики.
Генератор стабильного тока выпол­
нен по приведенной на рис. Л,а схеме.
Для расширения функциональных воз­
можностей база и эмиттер транзистора
К7з могут быть использованы для по­
Рис. 5. Интегральный вариант схемы
дифференциального каскада
дачи сигналов.
Входные
сигналы
могут
пода­
ваться на входы В х ь Вх2, Вхз, Вх4
различным образом:
=> при использовании двухфазного источника или источника с двумя
изолированными выходными зажимами сигналы подаются на входы
В х ь Вх2 симметрично относительно общей точки схемы;
=^> при использовании однофазного источника сигнал подается на один
из входов Вх] (В х 2) относительно общей точки, другой вход Вх2 (Вх|)
для сигнала должен иметь потенциал общей точки;
=> при использовании В х3, Вх4 на основе приведенной схемы могут быть
построены схемы двухкаскадных усилителей ОЭ— ОБ и ОБ— ОБ с ре­
гулированием усиления по свободному входу дифференциальной па­
ры (B xi или Вх2). При нелинейных операциях (преобразование часто­
ты, детектирование) к входам Вх3, Вх4 подключаются внешние источ­
ники сигналов, например гетеродин.
Выходной сигнал принципиально можно снимать с лю бого выхода
Вых, или Вых2. При этом вход Вх, (В х2) по отношению к ВыХ) (В ы х2)
является инвертирующим, а по отношению к Вых2 (ВыХ|) — неинверти­
рующим. Однако использование только одного из выходов усилителя не
позволяет в полной мере реализовать усиление ДК. Поэтому, как прави­
ло, сигналы снимаются с обоих выходов, что позволяет вдвое увеличить
коэффициент усиления ДК.
С х ем ы перехода к одноф азному вы ходу. Как указывалось выше,
для получения однофазного напряжения достаточно снимать сигнал с
одного из выходов ДК. Однако при этом ровно в два раза уменьшается
коэффициент усиления. Д ля сохранения усилительны х свойств Д К
используется сложение сигналов двух трактов с одинаковым по моду­
лю коэффициентом усиления \Кц\, при этом один из трактов должен
иметь на одну инверсию сигнала больш е (рис. в,а). Д ля иллюстрации
принципа рассмотрим схему усилителя (рис. 6,6), в которой переход к
однофазному выходу осуществляется с помощью каскада на транзи­
сторах VT4, VTS, позволяющих организовать два усилительны х тракта
со стороны входов. Усилительный тракт со стороны входа B xi содер­
жит каскады на транзисторах V T X, VT4, УТ5, построенные по схемам
О Э -О К -О Б . Усилительный тракт со стороны входа Вхг построен на
транзисторах
УТ2, VTS, включенных по схеме О Э -О Э . Каждый из
трактов имеет одинаковое усиление, однако первый тракт имеет одну
инверсию сигнала, второй тракт — две. Поэтому, как видно из рис.
6,6, выходные сигналы, поступающие на выход « В ы х » усилителя со
стороны входов Вх, и Вх2, совпадают по фазе.
с
—
Вых
О -Е п
Рис. 6. Принцип перехода к однофазному выходу без потери усиления (а)
и пример его реализации (б)
Д иф ф еренц иальны е каскады с ди нам ической нагрузкой . Основ­
ной недостаток дифференциальных усилителей с использованием рези­
сторов в качестве коллекторной нагрузки — небольш ой коэффициент
усиления при малых токах ГСТ. Использование такого каскада в каче­
стве первого каскада многокаскадного усилителя ограничивает его час­
тотные свойства, ухудшает дрейфовые параметры и шумовые характе­
ристики. Д ля повышения коэффициента усиления дифференциального
усилителя
в монолитных
ИС
используют динамическую
нагрузку.
В качестве примера усилителя с динамической нагрузкой рассмотрим
схему, изображенную на рис. 7,а. В этой схеме токопитающий каскад
выполнен на /?-«-/>транзисторе VT(). В качестве нагрузки усилительных
р-я-р-транзисторов VTU VT2 дифференциального каскада служ ит Г С Т в
виде «то к о в о го » зеркала на w-р-и-транзисторах К7з, VT4.
Рассмотрим принцип работы усилителя в трех режимах.
При нулевом напряжении на базах транзисторов VTU VT2 (рис. 7,а) ток
/0 токопитающего каскада поровну распределяется между транзисторами.
В силу свойств «токового» зеркала коллекторный ток транзистора VT4
должен повторять ток транзистора VT3. По этой причине ток через на­
грузку R Hне протекает.
Рис. 7. Дифференциальный каскад с динамической нагрузкой
При подаче на базу р-и-р-транзистора VT2 запирающего положи­
тельного напряжения + U весь ток /о токопитающего каскада протекает
через VTi (рис. 1,6). Транзистор УТ2 заперт. В силу свойств «токового»
зеркала ток /0 протекает через VT4 и, следовательно, через нагрузку по
цепи: общая точка схемы, R H, VT4, -Е „.
При подаче на базу транзистора VT2 отрицательного напряжения - U
весь ток 10 токопитающего каскада протекает через VT2 (рис. 1,в). Транзи­
стор VT\ заперт. Поэтому ток через VT} и VT4 не протекает. Ток /0 проте­
кает через нагрузку по цепи: + Е П, VT0, VT2, R H, общая точка схемы.
9.6. В ы ходны е уси л и тел ь н ы е каскады
Общие сведения. Особенности выходных усилительных каскадов рассмот­
рим на примере оконечных усилителей звуковоспроизводящей (в частности,
радиоприемной) аппаратуры с нагрузкой в виде динамика. Условия работы
оконечных каскадов отличаются от условий работы других усилительных
каскадов, используемых в большинстве случаев как малосигнальные усили­
тели напряжения:
=> динамик обладает низкоомным сопротивлением;
=> повышение мощности требует увеличения уровня входного напряже­
ния, что связано с использованием нелинейной области вольт-амперных характеристик транзистора;
=> для получения максимальной мощности в нагрузке необходимо согла­
совывать ее сопротивление с внутренним сопротивлением выходного
каскада;
=> выделение тепла в транзисторах приводит к их нагреву и возможному
их выходу из строя, что требует принятия специальных мер по охла­
ж дению транзисторов',
=> выходные каскады радиоприемников в отличие от выходных каскадов
радиопередающих устройств должны сохранять форму подаваемых
на их вход звуковых сигналов.
Специфика условий работы приводит к тому, что при проектировании и
разработке оконечных усилителей на первый план выдвигаются энергетиче­
ские показатели усилителя (выходная мощность, коэффициент полезного
действия), а также нелинейные искажения. Получение высоких энергетиче­
ских показателей и малых нелинейных искажений требует особого внимания
при выборе схемного решения выходного каскада, режима работы транзи­
сторов и его стабилизации при воздействии различных дестабилизирующих
факторов (изменение температуры, напряжения питания, давления и др.).
Режимы работы транзистора в усилительном каскаде. В основу клас­
сификации режимов работы транзистора при усилении аналоговых сигналов
положена продолжительность протекания гармонического тока через тран­
зистор. Режимы делятся на четыре класса (рис. 1): А, А В , В и С.
В реж име класса А (рис. 1,а) коллекторный ток протекает через тран­
зистор в течение всего периода. Для этого режима справедливо следую ­
щее соотношение между амплитудой коллекторного тока основной час­
тоты /к1 и постоянной составляющей /ко, именуемое коэффициентом
формы тока: у = /к|//к0 < 1.
338
fiT
а)
0
> 71/2
6 = 71 /2
г)
с
е<ъ/1
29
Рис. 1. Режимы работы транзистора
в усилительном каскаде
Рис. 2. Выбор рабочей точки транзистора (б)
в усилительном каскаде (а)
В других реж им ах коллекторный ток протекает через транзистор
лишь часть периода. Для классификации этих режимов вводят понятие
угла отсечки. Углом отсечки 9 называют половину той части периода
гармонического колебания, выраженную в угловой мере, в течение кото­
рой через транзистор протекает ток. В зависимости от значения угла от­
сечки различают режимы:
=> класса А В (рис. 1,6), для которого 0 > п/2',
=> класса В (рис. 1,в), для которого 0 = л/2;
=> класса С (рис. 1,г), для которого 0 < п/2.
Наибольший интерес при усилении звуковых колебаний в выходных
каскадах радиоприемников представляет режим класса В, в котором ток
имеет форму синусоиды с длительностью половины периода. Это обстоя­
тельство принципиально позволяет усиливать звуковые колебания без
искажений с высокой энергетической эффективностью. Для режима
класса В коэффициент формы тока у = я/2. В этом режиме усилитель
имеет более высокий КП Д, так как коэффициент формы тока больше, чем
в режиме класса А . Кроме того, при отсутствии входного сигнала (режим
молчания) усилитель в режиме класса В не потребляет тока. Однако из-за
нелинейности проходной характеристики г'к =/(м6з) на начальном участке
в режиме класса В возникают искажения. Как будет показано ниже, для
их уменьшения используют режим класса АВ.
Режим класса С создает высокий уровень нелинейных искажений и,
несмотря на более высокий КПД, не находит применения в усилителях
звуковых колебаний.
Т о т или иной режим работы транзистора определяет рабочая точка,
представляющая собой напряжения на электродах транзистора и проте­
кающий через него ток при отсутствии усиливаемого сигнала (например,
^ко> Ло)- Рассмотрим выбор рабочей точки с помощью нагрузочной пря­
мой для схемы на рис. 2,а, полагая, что протекающий через транзистор
ток определяется семейством характеристик (рис. 2,6)
(!)
гк = Ak> ик).
Как следует из рис. 2,а, коллекторный ток зависит также от напряже­
ния источника питания Е и сопротивления RK в коллекторной цепи
(2)
iK = ( E - u K)/ RK.
При известных /6, Е , RK система уравнений (1 ), (2 ) позволяет опре­
делить i K, ик. Будем решать эту систему графическим методом. Для
этого на семейство характеристик (1 ) в координатах /к, ик нанесем
прямую линию (2 ) по двум точкам:
=> при i K= 0 напряжение на коллекторе ик = Е;
=> при « к = О ток /к =
= Е / RK.
Линия, соединяющая точки ик = Е и /к = 1кт называется нагрузочной
прямой. Точка пересечения нагрузочной прямой с характеристикой се­
мейства (1 ) позволяет для заданного значения тока базы /V, найти значения
гк, ик- Положение рабочей точки на семействе характеристик задается
током базы г'б = /ед при отсутствии усиливаемого сигнала и определяет
значения /ко, UKо в состоянии покоя (рис. 2,6). При выборе рабочей точки
необходимо учитывать, что рабочая область характеристик транзистора
ограничена:
=> линией критического режима (Л К Р ) и осью абсцисс, которые, по сути
дела, соответствуют режимам насыщения и отсечки транзистора;
=> максимально допустимыми значениями коллекторного тока /к доп и
напряжения £/кдоп;
=> м аксимально допустим ой м ощ н остью рассеивания на к о лл ек то ­
ре транзистора: мк-/к = Р к доп . Уравн ен и е iK = Р к доп/мк представля­
ет со б о й гиперболу, которая представлена на рис. 2,6 п ун к ти р ­
ной линией.
Для выбора режима можно также пользоваться проходными характе­
ристиками транзисторов iK= fiu (n). На рис. 3 и 4 проиллюстрированы ре­
жимы А и В, для которых рабочая точка задается с помощью напряжения
на базе транзистора оконечного каскада.
i,
Т
Рис. 3. Режим класса А
Рис. 4. Режим класса В
М а к с и м а л ь н ы е энергетические показатели у си л и т ел ь н ы х кас­
кадов. Рассмотрим некоторые схемные решения уси ли телей и выявим
для них максимальные энергетические показатели. При этом будем
использовать
транзистора.
Каскад
нагрузки
идеализированные
с
вольт-амперные
непосредственным
характеристики
включением
(рис. 5,в). Для выбора рабочей точки транзистора VT на
семействе его характеристик строится нагрузочная прямая по изложен­
ной выше методике. Значения сопротивлений /?бь R &2 в базовой цепи уси­
лительного каскада (рис. 5,в) выбираются такими, чтобы базовый ток был
равен г'б4 (рис. 5,6). В этом случае рабочей точке соответствует коллек­
торный ток /к0 и напряжение на коллекторе — UK(I. Если к базовой цепи
подключить источник синусоидального тока г'б с амплитудой /дi= 4 ?- *64=
= *6 4 _ *бь то будет реализован режим класса А, в котором коллекторный
ток (рис. 5,а) и напряжение на коллекторе (рис. 5,г ) имеют синусоидаль­
ную форму, причем /к1 = /к0, TJK1 = Ukq. Выражения полезной мощности,
выделяемой на нагрузке R H, мощности, потребляемой от источника пита­
ния +Е, и К П Д усилительного каскада имеют следующий вид:
где у = 7ki//k0 = 1 — коэффициент формы тока; % = /к0/£ = 0,5 — коэффи­
циент использования напряжения коллекторного источника питания. Для
реальных характеристик транзистора у < 1, £ < 0,5, поэтому т] < 25% .
Рис. 5. Режим с максимальными
энергетическими показателями
усилительного каскада
с непосредственным включением
нагрузки
Каскад
с
подачей
Рис. 6. Режим с максимальными
энергетическими показателями
усилительного каскада с подачей
питания через RK
питания
через
резистор
RK(рис. 6,в). В этой схеме напряжение на коллектор транзистора VT подается
через резистор RK, а нагрузка RH подключается через разделительный кон­
денсатор Ср, сопротивление которого переменному току будем считать рав­
ным нулю. Рабочая точка (/ко, £Л«) должна располагаться на нагрузочной
прямой (тонкая линия на рис. 6,6) для постоянного тока, построенной по
известному значению сопротивления RK, и задается с помощью сопротивле­
ний R6l, /?62в базовой цепи усилителя (рис. 6,в). Сопротивление переменному
току представляет собой параллельное соединение сопротивлений RHи RK:
R = Я„Як/{ R„+RK) < RK. Поэтому строится нагрузочная прямая для перемен­
ного тока (толстая линия на рис. 6,6), которая должна проходить через рабо­
чую точку. Ее наклон к оси ординат определяется соотношением uKJ iK_ = R .
Параметры схемы усилительного каскада выбраны таким образом, что
=U
U K1 = UKо. Для энергетических показателей рассматриваемого усили­
тельного каскада соотношения (1) сохраняют силу. Однако UKl < Е, поэтому
значение КПД этого каскада значительно меньше 25%.
Каскад
с
подачей
питания
через
дроссель
L д р (рис. 1,в). В этой схеме нагрузка RHи дроссель /,др подключены парал­
лельно. Напряжение на коллектор транзистора VT подается через дроссель
£др, сопротивление которого постоянному току будем считать равным нулю.
Поэтому нагрузочная прямая для постоянного тока представляет собой пер­
пендикуляр, восстановленный из точки ик = Е. Напряжение на коллекторе
и«о при отсутствии сигнала всегда равно напряжению источника питания Е.
Постоянный ток /ко задается резисторами Rqi, R„2 - Полагаем, что для пере­
менного тока ю1др »
RH. Поэтому нагрузочная прямая по переменному току
должна проходить через рабочую точку (1Ко, Ц<о) и иметь наклон к оси орди­
нат uKJ гк_ = R„. Параметры схемы усилительного каскада соответствуют пре­
дельному случаю режима класса А. Для оценки энергетических показателей
усилительного каскада можно пользоваться соотношениями (3). В этом слу­
чае максимальное значение коэффициента £,= UK\/E = 1, поэтому предельно
достигаемый КПД усилителя составляет 50%.
Рис. 7. Режим с максимальными
энергетическими показателями
усилительного каскада с подачей
Рис. 8. Режим с максимальными
энергетическими показателями
двухтактного усилительного каскада
питания через дроссель
Двухтактны й
жиме
класса
ус илительный
каскад
в
р е ­
В (рис. 8,в). Двухтактный каскад выполнен по схеме
О Э -О Э с использованием комплементарных транзисторов, представляющих
собой пару из п -р—п- и р - п - р-транзисторов с идентичными характеристиками.
Источники сигналов включены в базовые цепи и поочередно отпирают тран­
зисторы VT\, VT2 на половину периода переменного тока. В отсутствие сигна­
лов ток через транзисторы не протекает, поэтому рабочие точки имеют коор­
динаты iK= 0, ик= ± Е (рис. 8,6). Знак минус относится к/?-»-/?-транзистору VT2.
Все построения на рис. 8 приведены для и-/>-и-транзистора VT\\ нагрузочная
линия на семействе вольт-амперных характеристик (рис. 8,6), временные диа­
граммы коллекторного тока (рис. 8,а) и напряжения на коллекторе (рис. 8,г).
В установившемся режиме через нагрузку RHпротекает синусоидальный ток с
амплитудой /к1, образованный из импульсов тока VT\, VT>. Напряжение на на­
грузке RHимеет также синусоидальную форму, его амплитуда равна UK]. Сле­
довательно, на нагрузке выделяется мощность Ло—0,5 /к] UKl. Постоянный ток
через нагрузку не протекает. Значение тока, протекающего от источников Е
через каждый транзистор, вычисляется по формуле
Используя (4), определим мощность, потребляемую от источников
напряжения, и КПД усилителя:
но = 2 £ '/ к0;
л = р«
Ро
. 0,25/„t/„
= 0,25у^ = 0,25л = 0,785.
1коЕ
Двухтактные бестрансформаторные каскады. Выше установлено, что
наибольшим КПД обладает двухтактный усилительный каскад. В инте­
гральных схемах двухтактные усилители строятся по бестрансформаторным
схемам, поэтому представляет интерес рассмотреть двухтактные усилители
этого класса и выявить их особенности. На рис. 9 приведены три возможных
варианта схем двухтактных бестрансформаторных усилителей.
ОК-ОК
ОЭ-ОЭ
ОК-ОЭ
Рис. 9. Двухтактные бестрансформаторные каскады
В усилителе, построенном по с х е м е
О К - О К
(рис. 9 ,а), исполь­
зуются комплементарные транзисторы п -р —п- и р-п-р-тжюъ. Усилитель обла­
дает высокоомным входным и низкоомным выходным сопротивлениями, что
обеспечивает хорошее согласование с динамиком, представляющим собой
низкоомную нагрузку. В силу разнотипности транзисторов входное напряже­
ние на их базы подается синфазно. Этим достигается поочередная работа тран­
зисторов VT], VT2 усилителя. Действительно, при положительной полуволне
входного напряжения открыт «-р-н-транзистор VT, и заперт
р-транзистор
VT2, поэтому через нагрузку RH протекает ток 4i- Во время действия отрица­
тельной полуволны открыт транзистор VT2 и заперт транзистор VT\, через на­
грузку RH протекает ток
в противоположном направлении (рис. 9,а). Воз­
можно соединение баз обоих транзисторов, как показано на рис. 10,г, и подача
входного напряжения на общий вход. Так как в схеме О К -О К используются
комплементарные транзисторы, их вольт-амперные характеристики можно
представить на одном рисунке (рис. 10,а) в первом и третьем квадрантах и
рассмотреть воздействие входного напряжения ит (рис. 10,в) на результирую­
щую характеристику. В силу нелинейности результирующей характеристики
отклик тока (рис. 10,6) не является синусоидальной функцией, что свидетель­
ствуют о наличии нелинейных искажений. Рассмотренный режим работы
транзисторов относится к случаю, когда рабочая точка каждого их них распо­
ложена в начале координат вольт-амперных характеристик. При этом каждый
транзистор проводит ток ровно половину периода, т.е. используется режим
класса В. Основной причиной нелинейных искажений является наличие нели­
нейного участка в начале координат характеристик, из-за чего линейный уча­
сток характеристики транзистора сдвинут на £gi- Поэтому, подавая на базы
транзисторов
небольшое
положительное смещение,
можно
значительно
уменьшить уровень нелинейных искажений усилителя.
Рис. 10. Нелинейные искажения в двухтактном усилительном каскаде
в режиме класса В
На рис. 11 ,г приведена схема О К -О К , в которой между базами тран­
зисторов VT\, VT2 включены два диода V D U VD2, выполняющих функции
источников напряжения смещения Е д \
=
—E q2. Д л я получения результи­
рующей вольт-амперной характеристики транзисторов (рис. 11 ,а) их ра­
бочие точки /К|= 0, и6э1 = £б1 и / к2 = 0, м6э2 = ~Е 62 совмещены. Введение
напряжения смещения переводит работу транзисторов в режим класса
А В , для которого 20 > п (рис. 11,6). Несмотря на то что форма импульсов
коллекторного тока /к1, гк2транзисторов искажена, суммарный ток, проте­
кающий через нагрузку, имеет практически синусоидальную форму.
Уменьшение искажений в режиме класса А В достигается линеаризацией
результирующей вольт-амперной характеристики.
Режим А В
Рис. 11. Режим класса А В двухтактного усилительного каскада
В бестрансформаторном усилителе по с х е м е
О Э - О Э
(рис. 9,6),
так же как и в схеме О К -О К , используются комплементарные транзисто­
ры. Усилитель обладает высокоомным выходным сопротивлением и, хотя
позволяет потенциально получить наибольший коэффициент усиления
мощности,
при работе
на низкоомную
нагрузку
в виде
динамика
не усиливает напряжения. Таким образом, бестрансформаторная схема
О Э -О Э по сравнению со схемой О К -О К выигрыша в усилении не дает.
Двухтактный режим работы усилителя обеспечивается синфазной пода­
чей входного напряжения на базы транзисторов VTh VT2. При действии
положительной
полуволны
входного
напряжения
открыт
п-р-п-
транзистор VT2 и заперт р-я-р-транзистор VTU поэтому через нагрузку R H
протекает ток iK2. Во время действия отрицательной полуволны открыт
транзистор VT\ и заперт транзистор VT2, через нагрузку RH протекает ток
4i в противоположном направлении (рис. 9,6). Каскад усиления О Э-О Э ,
в отличие от схемы О К -О К , требует управления из двух точек, разность
напряжений между которыми должна составлять 2 E - 2 U ^ .
В
двухтактной
О К - О Э
бестрансформаторной
схеме
усилителя
используются однотипные транзисторы (рис. 9,в). Поэтому
подаваемые на базы транзисторов напряжения сигналов должны иметь
разную полярность, причем разность постоянного напряжения между
базами должна составлять Е. Для этой цели можно использовать фазоин­
версный каскад (рис. 12). При положительной полуволне входного на­
пряжения открывается транзистор VT2, включенный по схеме ОЭ, при
отрицательной
полуволне
входного
напряжения —
транзистор
VT\,
включенный по схеме с ОК. Достоинство рассматриваемой двухтактной
схемы — однотипность транзисторов, однако их включение по схемам с
О К и ОЭ, обладающими различными свойствами, приводит к неидентичности полуволн выходного напряжения.
тршписгор
Рис. 12. И спользование
р-и-/>транзистор
Рис. 13. Схемы составных транзисторов
фазоинверсного каскада
для согласования с двух­
тактным усилителем
Поэтому часто двухтактные усилители строят на составных однотипных
и разнотипных транзисторах, включенных соответственно по схеме Дар­
лингтона (рис. 13,а) или по композитной схеме (рис. 13,6). Каждая пара со­
ставных транзисторов эквивалентна одному транзистору с коэффициентом
усиления базового тока (3v= Р 1Р 2, где Р = I/ h ~ U h \ Рь Рг — коэффициенты
усиления базового тока первого и второго транзисто­
ров. На рис. 14 в качестве примера приведена схема
двухтактного усилителя, построенная на составных
транзисторах и представляющая собой, по сути дела,
схему О К -О К (см. рис. 10). Три диода предназначены
для работы транзисторов в режиме класса АВ. Досто­
инство схемы состоит в том, что более мощные вы­
ходные транзисторы являются однотипными, менее
мощные входные транзисторы составляют компле­
ментарную пару.
Особенности
микросхемных
усилителей.
Рис. 14. Схема
двухтактного уси­
лителя на состав­
ных транзисторах
Вы­
ходная мощность низкочастотных усилителей может
составлять десятки ватт. Такие усилители, как правило, выполняются в виде
отдельных микросхем и представляют собой многокаскадное устройство,
включающее предварительный усилитель Г1У и оконечный каскад ОК
(рис. 15). Микросхемы усилителей снабжены средствами тепловой защиты и
защиты от перегрузок. Для стабилизации режима и улучшения показателей
используются отрицательные обратные связи (О О С ) по постоянному и пе­
ременному току. Чтобы исключить возможность самовозбуждения усилите­
лей, предусмотрены средства коррекции их частотных характеристик. Для
уменьшения нелинейных искажений в некоторых микросхемах приняты
дополнительные меры в виде вольтодобавки.
И сп ользование
ООС.
При
построении
многокаскадных
усилителей каждый каскад, как правило, охватывается местной ООС. Эта
мера, приводящая
к сниже­
нию коэффициента усиления
каждого
каскада,
устойчивость
повышает
работы
всего
усилителя. При большом ко­
эффициенте усиления много­
каскадного усилителя малей­
шие
изменения
положения
рабочей точки входного уси­
лительного
каскада
за
счет
влияния различных дестаби­
лизирующих факторов могут привести к нарушению нормальной работы
оконечного каскада. Поэтому в микросхемах предусмотрены средства
для организации глубокой ООС, которой охватывается весь усилитель.
Обычно цепь обратной связи предусматривает создание ООС как по по­
стоянному, так и по переменному току с возможностью регулировки ее
глубины. На рис. 15 приведена схема такого технического решения. Пре­
дусмотрена внутренняя обратная связь, которая обеспечивается резисто­
ром R 1, включенным между выходом оконечного каскада О К и инверти­
рующим входом предварительного усилителя ПУ.
При подключении к выводу 1 цепи СЯ2, как показано на рис. 15, создает­
ся цепь ООС по переменному току, коэффициент передачи которой при дос­
таточно большом значении С равен Л2 / (/?i + R j) и может изменяться с по­
мощью R 2(обычно R2«
R\). Отрицательная обратная связь по переменному
току уменьшает уровень частотных и нелинейных искажений.
Для организации ООС по постоянному току к внешнему выводу 1
подключается только конденсатор С. Обратная связь стабилизирует уро­
вень постоянного напряжения, равный Ети/2, что позволяет получить
наибольший динамический диапазон.
Коррекция
частотных
характеристик
[28].
Так как при построении выходных усилителей используются непосредст­
венные связи между каскадами, амплитудно-частотная характеристика
(А Ч Х ) является равномерной практически во всем диапазоне звуковых
частот. Поэтому коррекция частотных характеристик производится для
устранения самовозбуждения. Она преследует цель:
=> сохранить ООС в области нижних частот, где коэффициент усиления
К > 1;
=> получить коэффициент усиления К < 1 в области частот (обычно это об­
ласть верхних частот), где обратная связь становится положительной.
Коррекция сводится к уменьшению ширины полосы пропускания
усилителя путем введения ЛС-цепи, которая обеспечивает спад А Ч Х со
скоростью -2 0 дБ/декада. Для этого в микросхемах используются внут­
ренние емкости или предусматриваются выводы для подключения внеш­
них конденсаторов.
И сп о льзо в ание
вольтодобавки
[28].
С повышени­
ем уровня входного сигнала из-за нелинейности вольт-амперных харак­
теристик транзисторов (в основном предоконечного каскада) увеличива­
ются нелинейные искажения усилителя. Для уменьшения искажений на
последние каскады подается выходное напряжение в виде вольтодобавки.
Вольтодобавка увеличивает уровень выходного напряжения (или мощно­
сти) при сохранении нелинейных искажений, что равносильно снижению
нелинейных искажений для исходного уровня выходного напряжения
(или мощности).
9.7. И зб и р ател ь н ы е уси л и тел и
Рассмотрим два типа избирательных усилителей, которые применяются в
радиоприемной аппаратуре.
У си ли тели вы сокой частоты (У В Ч ). Такие усилители, включаемые
непосредственно за входной цепью радиоприемника, предназначены:
=> для повышения уровня мощности сигналов на несущей радиочастоте
без существенных изменений спектра с целью уменьшения коэффи­
циента шума и повышения чувствительности приемника;
=> для обеспечения требуемой избирательности по зеркальному и дру­
гим дополнительным каналам в приемнике супергетеродинного типа.
Известно [28], что коэффициент шума N приемника определяется соб­
ственными шумами и усилением мощности его первых каскадов (рис. 1):
/14
(1 )
» г ХТ Л 'г - !
jV, —1
N = N . + —^---- + ---- ------ + _
кп
К Р[К Р2
Из выражения (1) следует, что для
уменьшения N
необходимо умень­
шать собственные шумы N \У В Ч (со ­
вместно с входной цепью и антен­
ной) и увеличивать его коэффициент
усиления мощности К Р\. При АГР]> 10
Рис. 1. Схема для определения
коэффициента шума приемника
собственные шумы преобразователя
частоты (П Ч ) и усилителя промежуточной частоты (У П Ч ) практически не
оказывают влияния на коэффициент шума приемника. По этой причине
У В Ч содержит один-два усилительных каскада.
На умеренно высоких частотах наибольшее распространение нашла схема
УВЧ с общим эмиттером (ОЭ), позволяющая получить максимальное усиле­
ние мощности при небольшом уровне собственных шумов. В схеме на рис. 2,а
используется последовательное питание базовой и коллекторной цепей. На­
пряжение смещения снимается с резисторного делителя напряжения R5ь R62 и
подается на базу транзистора через катушку индуктивности контура входной
цепи LKCK. Блокировочный конденсатор Сбл выполняет две функции:
=> разделяет точку съема напряжения смещения от общей точки схемы,
обеспечивая доступ постоянного напряжения на базу;
=> совместно с конденсатором Сэ подключает источник сигналов непо­
средственно к переходу база — эмиттер транзистора, минуя делитель
напряжения R6l, R62.
Параллельная цепь ЛЭСЭ служит для стабилизации режима по посто­
янному току с сохранением усиления каскада.
Напряжение питания на коллектор поступает от источника Е к через
фильтр ЛфСф, который служит для развязки У В Ч по цепи питания от дру­
гих каскадов приемника, и выходной контур £ КСК. Конденсатор фильтра
Сф выполняет функции, сходные с Сбл.
Рис. 2. Схемы высокочастотных усилителей: с общим эмиттером (а),
с общей базой (б), каскодная схема (в)
На рис. 2,6 приведена схема У В Ч с общей базой (ОБ), которая нахо­
дит применение в УКВ-диапазоне благодаря большому значению устой­
чивого коэффициента усиления.
Источник сигналов в виде 1 кСк-контура входной цепи включается в
эмиттерную цепь транзистора последовательно с резистором Л,. Напря­
жение смещения на базу подается с резистивного делителя напряжения
Л бь R&2 , при этом база по высокой частоте подключена к общей точке
схемы через малое сопротивление конденсатора С6. Коллекторная цепь
не имеет отличий от схемы У В Ч с ОЭ.
Среди двухкаскадных схем У В Ч следует выделить каскодную схему
О Э -О Б (рис. 2,в), совмещающую в себе достоинства обеих схем. В этой
схеме используется непосредственная связь между каскадами с ОЭ и ОБ.
Напряжение смещения на базы транзисторов VT\, VT2 подается через де­
литель напряжения, составленный из резисторов Л б,, Я62, /?бз- Схемы
входной и выходной цепей не отличаются от аналогичных цепей каска­
дов с ОЭ и ОБ.
У с и л и т е л и промежуточной частоты (У П Ч ). Такие усилители пред­
назначены для обеспечения основного усиления радиоприемного устрой­
ства д о уровня, требуемого для нормальных условий работы детектора, и
подавления сигналов соседних каналов радиоприема. Они работают на
фиксированной, более низкой промежуточной частоте, чем частота
радиосигнала. Фиксированное значение частоты способствует созданию
полосовых фильтров с формой частотной характеристики, близкой к
прямоугольной. Снижение частоты радиосигнала позволяет увеличить
устойчивый коэффициент усиления отдельных каскадов и усилителя в
целом. Усилители этого типа содержат фильтр сосредоточенной избира­
тельности, который включается между преобразователем частоты и пер­
вым (реж е вторым) каскадом У П Ч . Усилитель промежуточной частоты
представляет собой многокаскадный апериодический усилитель, выпол­
ненный в виде микросхемы. В качестве фильтров используют выпускае­
мые промышленностью пьезоэлектрические, кварцевые, электромехани­
ческие и другие типы фильтров.
9.8. О п ер ац и о н н ы е ус и л и те л и
О бщ ие сведения. Операционные усилители (О У ) использовались в каче­
стве элементной базы аналоговых вычислительных машин, которые ши­
роко применялись в 50— 60 гг. прошлого столетия для моделирования и
решения дифференциальных уравнений и других вычислительных задач.
На основе операционных усилителей строились узлы для выполнения
различных математических операций: дифференцирования, интегрирова­
ния, суммирования, вычитания, логарифмирования и др. Возможность
выполнения большого количества разнообразных операций благодаря
избыточности усиления и послужило основанием для названия усилите­
ля. Как было показано выше (п. 9.3), свойства усилителя, охваченного
отрицательной обратной связью, при большом коэффициенте усиления
полностью определяются свойствами цепи обратной связи. Поэтому пу­
тем изменения цепей обратной связи можно изменять вид выполняемой
операции. Другим условием широких функциональных возможностей
операционного усилителя является использование дифференциальной
схемы для его построения, на основе которого строятся автогенераторы,
преобразователи, умножители и делители частоты, все виды модуляторов
и детекторов, различные импульсные устройства (п. 9.5). Таким образом,
в основе многофункциональности операционного усилителя лежат два
фактора: и з б ы т о ч н о с т ь
ние
усиления
дифференциальной
и
схемы
и с п о л ь з о в а ­
для
его
по­
с т р о е н и я . Благодаря многофункциональности операционные усили­
тели являются в настоящее время наиболее массовым типом аналоговых
интегральных схем.
О перационны й усилитель и его особенности. К операционным уси­
лителям относят унифицированные многокаскадные усилители, которые
выполнены в виде интегральных схем и обладают следующими основ­
ными свойствами:
=> имеют два входа и один выход. При этом один из входов является
прямым, другой — инверсным. Увеличение напряжения на прямом
входе усилителя вызывает увеличение выходного напряжения, а уве­
личение напряжения на инверсном выходе — уменьшение. При пода­
че на оба входа усилителя нулевого напряжения его выходное напря­
жение практически равно нулю. Благодаря этому О У имеет симмет­
ричную амплитудную характеристику (рис. 1,д);
=> имеют два вывода для подключения напряжения питания. Обычно
напряжения питания симметричны, например, ±6 В. Реже встречаются
несимметричные напряжения питания (например +12 и - 6 В). Кроме
этого О У имеют вспомогательные (не несущие функциональной на­
грузки) выводы с метками FC — для присоединения цепей, корректи­
рующих А Ч Х О У, и с метками N C — для балансировки О У (установ­
ки нуля на выходе);
=> обладают
очень
большим
коэффициентом
усиления
(порядка
105__106), высоким входным (от сотен килоом до сотен мегаом) и ма­
лым выходным (от единиц до нескольких сотен ом) сопротивлением,
широкой полосой частот (от 0 до десятка мегагерц), низким уровнем
шума и хорошей температурной стабильностью.
Обычно параметры О У разделяют на следующие группы: входные,
выходные, усилительные, энергетические, дрейфовые, шумовые и скоро­
стные.
Схем отехника операционны х усилителей. Первые монолитные О У
строились по трехкаскадной модели (с тремя усилителями напряжения)
на «-/т-и-транзисторах. Четверым каскадом являлся эмиттерный повто­
ритель, который не усиливал напряжения и служил для получения низко­
го выходного сопротивления. Используемая трехкаскадная модель имела
ряд недостатков:
=> для получения высокого входного сопротивления, улучшения дрей­
фовых и шумовых параметров первый каскад работал в режиме с низ­
ким уровнем рабочего тока, из-за чего имел весьма малое значение
коэффициента усиления. Это обстоятельство заставляло использовать
дополнительно два каскада усиления напряжения;
=> на рис. 1, а изображена идеальная амплитудная характеристика £/вых =
~ F (U bx) О У,
обеспечивающая усиление
сигналов без искажений
в диапазоне амплитуд 0...(t/BX тах- £/вых min)/2. В многокаскадных О У
на
я-р-и-гранзисторах
наблюдается
уровня
повышение
постоянного
на­
пряжения на выходе каж­
дого последующего каска­
да по отношению к вход­
ному, из-за чего амплитуд­
ная
характеристика
стится
влево
сме­
(рис. 1,6).
Рис. I . Амплитудны е характеристики
операционного усилителя
В результате уменьшается
диапазон входных амплитуд усиливаемых сигналов;
— использование большого числа усилительных каскадов усложняет
коррекцию частотной характеристики О У , проводимую для устране­
ния самовозбуждения.
Внедрение в интегральную технологию р —п—р-транзисторов (совместно с
л-р-л-транзисторами) с удовлетворительными статическими и частотными
параметрами позволило реализовать двухкаскадную модель О У, лишенную
указанных выше недостатков. В качестве примера рассмотрим простейшую
схему О У, построенного по двухкаскадной модели (рис. 2,а). На рис. 2,6
приведено условное графическое обозначение ОУ.
Первый
усилительный каскад УК1 построен по дифференциальной
схеме с генератором стабильного тока (р—п -р-транзисторы VT2, VT3, VT1).
В коллекторные цепи транзисторов VT2, VT3 включено токовое зеркало на
п~р~‘^-транзисторах VT4, VT5, выполняющее функции динамической нагруз­
ки. Принцип работы схемы рассмотрен в параграфе 9.5 (рис. 7). Применение
динамической нагрузки, сопротивление которой для переменного тока со­
ставляет сотни килоом, позволяет при малых токах (микроамперы) получить
высокое входное сопротивление (сотни килоом) и большое значение коэф­
фициента усиления по напряжению (сотни раз).
Второй
усилительны й каскад У К 2 построен по схем е О К —О Э
(я-/?-«-транзисторы VT6, VTg), поэтом у имеет высокое входное со-
противление (практически не нагружает У К 1 ) и больш ое усиление
напряжения.
Рис. 2. Принципиальная схема операционного усилителя (а )
и его условное графическое обозначение (б )
В качестве в ы х о д н о г о
оконечного каскада ОК используется
двухтактный усилитель на комплементарных транзисторах VTg, КТю,
включенных по схеме О К—ОК. Отметим, что открытое состояние транзи­
стора VT9 поддерживается транзистором VT-, (при запертом VTg), а тран­
зистора VTl0 — транзистором VTg. В первом случае ток через нагрузку
протекает по цепи: + Е — VTg — /?„ — общая точка; во втором случае
по цепи: общая точка — R„ — VTg----- Е.
Достоинства
двухкаскадной модели:
—> отсутствует необходимость в использовании каскада сдвига уровня,
так как О У содержит п -р -п - и /^«-«-транзисторы;
=> р -п —п- и и-р-и-транзисторы в первом каскаде используются в качест­
ве усилительных элементов и динамической нагрузки, во втором кас­
каде — в качестве динамической нагрузки и усилительных элементов;
=> для коррекции частотной характеристики с целью обеспечения устойчи­
вости О У требуется всего лишь один конденсатор С небольшой емкости.
П ринципы построения ф ункциональны х узлов на О У . Рассмотрим
особенности построения узлов, реализующих линейные операции. Д ля
простоты изложения воспользуемся моделью идеального О У (рис. 3),
который имеет:
=> коэффициент усиления напряжения Кц —» °°. Поэтому
принимаем
равными напряжения на обоих входах О У : |(УВЬ|Х\/\Kl\ = 0 или U ] = U 2;
входное сопротивление О У Л вх —>
поэтому ток через входную цепь не
протекает, входной ток /вх равен току /вых в цепи обратной связи Z^;
выходное сопротивление О У Я вых —> 0, поэтому выходное напряжение
не зависит от нагрузки.
I<ВЫИ
и,
о—
-О
й2
t/вых
о—
о
9
1
О-
Рис. 3. Модель идеального
операционного усилителя
У злы
на
Рис. 4. Базовая схема для построения
инвертирующего усилителя,
интегратора и дифференциатора
основе
инвертирующего
усилите-
л я (рис. 4). С учетом принятых допущений составим уравнение для схе­
мы на рис. 4:
Z,
Z2
’
из которого в силу равенства {/, = 0 получаем
(1)
= - и , ыJ и вх = - Z 2/Z,.
Из (1 ) следует, что структура на рис. 4 позволяет реализовать:
=> инвертирующий усилитель.
получаем K = - R 2/Л) »
Действительно, приняв Z\ = R u Z 2 =
|1|, при условии, что /?2 »
Яй
=> интегратор. Приняв в (1) Z, = Л , Z2 = 1/(/соС), получаем ^
и™
= ~^»х /(/соСЛ), или г/вых ( 0 =
= -l/ (j(o C R )
|мвых(/)<* ;
=> дифференциатор. Приняв в (1) Z, = 1/(/ооС), Z2= Л, получаем К и = -усоСЛ
и™ ^»ых = ~ j t o C R U BX, или ивых(/) = - R C - - ^ t ] .
dt
Неинвертирующий
тель
усилит ел ь
и
п о в т о р и ­
(рис. 5). Для схемы на рис. 5,а справедливо следующее соотношение:
R,
U „ = U, = •
/?, +R.
или г/
=
t/ „ =
356
При R. 2 »
R\ схема на рис. 5,а является усилителем, при R2 =0, R\ = °°
( К = 1) — вырождается в повторитель (рис. 5,6).
R,
V„
б)
Рис. 5. Базовая схема для построения неинвертирующего усилителя
и повторителя
Фазовра щатель
(рис. 6). Для схемы на рис. 6 составим систе­
му уравнений:
U „ - U i _ £Л-^в:
(2)
7l
Л,
R2
R-,
’
~2
1+ JaCRn
П осле подстановки (/, в первое уравнение системы (2) находим U K
а затем коэффициент передачи фазовращателя
_ ^вых
j i QCRa - R 2 ! R,
ja C R n + 1
и ~ и
При R 2 — R\ получаем К ,, =
Rn - » 0 и А:с/= +1 при Rn - »
— L , откуда следует: К и - ~ 1 при
j< a C R „ + l
Следовательно, фазовращатель позволяет
изменять фазу в пределах 180°.
£/«1 /1 Л,
о— —*—СИЪ
^вк2 / 2 К 2
и„
о-
и, I
R
О—
,с
и2
С/в,ы х
t /в ы :
2
■О
Рис. 7. Инвертирующий сумматор
Рис. 6. Фазовращатель
Ин вертирующий
с у м м а т о р (рис. 7). На основании со­
отношения I \ + 1 2 = I получаем выражение выходного напряжения для
сумматора
напряжений
с
весовыми
коэффициентами
=
U вы х -
,
-
(^ в х 1
+
^вх2 ) •
которое
при R i ~ R 2 —R
принимает
вид
Неинвертирующий
сумматор
(рис. 8). Составим сис­
тему уравнения для схемы на рис. 8 с учетом того, что 1\+ / 2 = 0:
(3 )
—^ ~ U l = - ? ~ Ub' 2 ;
r2
R,
u
, = - r -}
u „
R3 + R4
U 2•
Подставив U2 в первое уравнение системы (3), находим из полученно­
го уравнения
j,
R2
R3 + R,
где K x = -----?------ 2----- —;
R x+ R 2
R}
Rt
R, + R4
R,+R2
R3
К
‘
При Й, = R2 = R 3 = R a получаем t/BbIX = U BXl + U m2.
Вы ч и т а т е л ь
на рис. 9
(4)
(рис. 9). Составим систему уравнения для схемы
U BX]- U l _ U t - U ,
R,
Лз
Rл
и 2 =-
R-,
r}
+ ra
и вх2 =£/,.
U, I R,
^.К1
/,
Л,
(/
о----- «—СП----Ubx2
[2 Rl
о----- m—EZJ
Рис. 8. Неинвертирующий сумматор
Uj
Рис. 9. Вычитатель
Подставив U\ в первое уравнение системы (4), находим из полученно­
го уравнения
(5)
и лых = K 2U tx2- K lU ml ,
где K x = h
— ;
R,
(6)
я, + r 2
r,
K 27 =
— -------„
' “ 2 — — • При R | = R 2 = R } = R4 получаем
-----Л,
r1+r4
и вых=ивх2- и ах1.
Выражение (5) относится к общему случаю операции вычитания с ве­
совыми коэффициентами К\, К 2, выражение (6 ) — к обычной операции
вычитания.
10. А В Т О Г Е Н Е Р А Т О Р Ы
И ПРЕОБРАЗОВАТЕЛИ СПЕКТРА
10.1. А в то ген ер ато р ы гар м о ни ч ески х колебаний
О бщ и е
сведения.
Автогенератором
называют
устройство,
преобразующее энергию источников постоянного напряжения (тока) в
энергию колебаний заданной формы. В отличие от устройств, работаю­
щих под воздействием внешних сигналов, автогенераторы работают в
режиме самовозбуждения. В схемном отношении автогенератор пред­
ставляет собой усилитель, охваченный цепью положительной обратной
связи. В зависимости от формы выходных колебаний различают автоге­
нераторы гармонических и импульсных колебаний. В дальнейшем рас­
сматриваются автогенераторы гармонических колебаний.
О с н о в н ы е т р е б о в а н и я , предъявляемые к автогенераторам:
=> диапазон частот генерируемых колебаний;
;=> характер изменения частоты (дискретный или плавный);
=> нестабильность частоты и фазы генерируемых колебаний;
=> уровень побочных спектральных составляющих;
=> выходное напряжение или мощность при заданной нагрузке.
Принцип работы автогенератора и условия равновесия. На рис. 1
приведена схема, которая в положении 1 переключателя П представляет со­
бой схему резонансного усилителя с подключенным источником сигналов, а
в положении 2 — схему автогенератора с индуктивной обратной связью.
Рассмотрим п р и н ц и п
работы
автогенератора, полагая, что
переключатель П находится в положении 2. При включении источника
питания Е в контуре автогенератора возникают колебания, создавая на
обмотке обратной связи напряжение U ж , которое прикладывается к базе
транзистора VT. Входное напряжение С/вх усиливается транзистором,
увеличивая амплитуду колебаний на контуре и напряжения на обмотке
обратной связи. На базу транзистора теперь поступает напряжение с
большей амплитудой и вновь усиливается, увеличивая амплитуду выход­
ных колебаний и т.д. Идет процесс нарастания амплитуды, или самовоз­
буждения, колебаний с частотой, равной резонансной частоте контура,
так как на этой частоте транзистор обеспечивает наибольшее усиление.
При больш ой амплитуде входного напряжения происходит насыщение
транзистора, он входит в режим ограничения коллекторного тока, пре­
кращается рост амплитуды колебаний на контуре и автогенератор пере­
ходит в стационарный реж им работы. Ниже приводится более строгое
описание процессов, протекающих в автогенераторе.
Прежде всего, определим у с л о в и я
р а в н о в е с и я . Пусть пе­
реключатель П находится в положении 1 и на вход усилителя от источника
сигналов U Q поступает напряжение U n с частотой С0о. Если с помощью
витков обмотки связи с контуром и его настройки подобрать амплитуду и
начальную фазу напряжения на обмотке, равные амплитуде и начальной
фазе входного напряжения ( 0 Ж = U BX), и мгновенно перевести переключа­
тель П из положения 1 в положение 2, то хотя бы в первый момент времени
условия работы транзистора VT не изменятся. Система будет находиться в
состоянии равновесия, которое запишем в комплексной форме:
где S — усредненная по первой гармонике крутизна транзистора; Z K—
сопротивление колебательного контура; К ос —
коэффициент передачи
цепи обратной связи. При этом S Z K
-1 KО
nr=
: Uк
л = U КJ l jBA
С U „ОС/ U К7
напряжение на контуре.
Рис. 1. Схема для пояснения принципа
работы автогенератора
Рис. 2. Два вида равновесия:
неустойчивое (а),
устойчивое (б)
Переписав (1) в виде двух равенств для вещественной и мнимой час­
тей, получим форму условий динамического равновесия в виде баланса
амплитуд и баланса фаз:
(2) 15 1■|Z K |•|К ж |= 1;
где |5|, cp.v, |ZK|, (рк, |ЛГД
фх + фк + фо с = о ,
— соответственно модули и фазовые углы усред­
ненной крутизны, сопротивления контура и коэффициента обратной связи.
Баланс амплитуд представляет собой уравнение |S |•|Z K |•|К ж |- 1 ,
зависящее от амплитуд токов и напряжений автогенератора, и позволяет
определить их значения. Так как фазы зависят от частоты, баланс фаз
(pv +срк +(рос = 0 позволяет определить частоту генерируемых колебаний.
Определим у с л о в и я
устойчивости
динамического рав­
новесия (2 ) или условия устойчивости амплитуд и фаз, т.е. условия, при
которых возможно существование колебаний длительное время после
перевода переключателя П из положения 1 в положение 2. Д ля этого вы­
ведем систему из равновесия, как показано на примере механического
аналога (рис. 2), придав ей небольшое возмущение, и проследим за ее
дальнейшим поведением. Если после возмущения система не возвраща­
ется в исходное состояние, то она неустойчива (рис. 2,а), если возвраща­
ется (рис. 2,6), то устойчива.
У с ло в и е устойчивости амплитуд. Для выявления этого условия вос­
пользуемся рис. 3, на котором приведены:
=> колебательная характеристика (К Х ), представляющая собой зависи­
мость амплитуды коллекторного тока транзистора /к от амплитуды
входного напряжения С/вх при постоянном напряжении смещения на
базе транзистора: /к = J [U m). Форма К Х зависит от угла отсечки 0
входного напряжения;
=> характеристика обратной связи (Х О С ) в виде линейной зависимости
амплитуды напряжения обратной связи t/oc от амплитуды коллектор­
ного тока транзистора: Uoc = F ( I K).
Колебательная характеристика и характеристика обратной связи (рис. 3)
могут быть сняты экспериментально в резонансном усилителе. Точками рав­
новесия (1,2, 3) являются точки пересечения К Х и ХОС, в которых t/BX= 11ж.
Как видно из рис. 3, при 0 > 90° имеются две точки равновесия, при 0 < 90°—
три точки.
Для определения устойчивости точек равновесия выведем систему из
равновесия путем возмущения входного напряжения на + A U и проследим за
её поведением. Например, для проверки устойчивости точки равновесия 2 на
рис. Ъ,а дадим входному напряжению возмущение -A U . В этом случае через
транзистор начнет протекать ток /к , соответствующий точке а на колеба­
тельной характеристике. Ток /к создаст напряжение обратной связи и ж , ко­
торое соответствует точке б на характеристике обратной связи. Так как в
замкнутой системе и ж = £/вх, через транзистор начнет протекать ток /к, соот­
ветствующий точке в на колебательной характеристике и т.д. по стрелкам,
указанным на рис. 3,а. Как видно из рис. 3,а, при возмущении на —A U на­
пряжения в точке равновесия 2 протекающие в схеме на рис. 1 процессы
возвращают систему в исходную точку 2, а не в точку равновесия 1. При
возмущении напряжения в точке равновесия 2 на +ДС/ система также воз­
вращается в исходную точку 2. Следовательно, для 0 > 90° точка 2 является
точкой устойчивого равновесия, точка 1 — точкой неустойчивого равнове­
сия. Поэтому при включении автогенератора достаточно малейшего возму­
щения, чтобы колебания начали нарастать и система перешла в стационар­
ный режим, соответствующий устойчивой точке динамического равнове­
сия 2. Такой процесс перехода в режим генерирования колебаний называется
мягким самовозбуждением. Из рис. 3,6 видно, что для 0 < 90° точками устой­
чивого равновесия являются точки 1 и 2, а точка 3 — точкой неустойчивого
равновесия. В этом случае для возбуждения колебаний необходимо началь­
ное возмущение с амплитудой, превышающей амплитуду колебаний, соот­
ветствующие точке 3. Такое самовозбуждение (если оно возможно) называ­
ют жестким самовозбуждением.
а)
б)
Рис. 3. Выявление условия устойчивости амплитуд
Из рис. 3 следует, что в точках устойчивого равновесия крутизна
ХОС больше крутизны КХ. В теории самовозбуждения колебаний дока­
зывается, что этот факт равнозначен следующему неравенству:
(3)
ЭЛи/Э/к >0,
т.е. приращение амплитуды тока / к и внутреннего сопротивления RKтран­
зистора должны иметь одинаковый знак. Действительно, если при увели­
чении / к возрастет внутреннее сопротивление Rm то возрастающее (по
сравнению с R„ = const) падение напряжения на нем препятствует росту
напряжения на выходе автогенератора. Чем сильней неравенство (3), тем
стабильней амплитуда колебаний на выходе автогенератора. Таким обра­
зом, устойчивость амплитуды генерируемых колебаний обеспечивается
усилительным элементом, внутреннее сопротивление R„ которого имеет
одинаковый характер изменения с амплитудой коллекторного тока (3).
М ягкое и ж есткое самовозбуждение. На рис. 4,б,г приведены зави­
симости амплитуды коллекторного тока / к от коэффициента обратной
связи Кж для режимов работы транзистора с углами отсечки 0 > 90 и
0 < 90°. Эти зависимости получены путем определения амплитуды тока / к
для Кж1 < Кж2 < Кжз < К Ж4 в точках устойчивого равновесия (рис. 4,а,в) и
переноса их на рис. 4,6,г в виде зависимостей / к= Г(КЖ).
е > 90°
1 /.„
£ /о с
К -K l
К ос2
е < 90°
Рис. 4. Мягкое (а, 6) и жесткое (в, г) самовозбуждение
В режиме мягкого самовозбуждения (0 > 90°) при увеличении Кжпроисходит
плавное нарастание амплитуды / к, начиная со значения / к= 0, которому соот­
ветствует коэффициент обратной связи Кж mm= Кж1. При уменьшении Кж
закон изменения амплитуды коллекторного тока / к сохраняется.
При 0 < 90° существует значение коэффициента обратной связи Кжз,
при котором всегда происходит самовозбуждение автогенератора, так как
в этом случае имеются лишь две точки равновесия, причем точка равно­
весия в начале координат является неустойчивой (рис. 4,в). При самовоз­
буждении амплитуда коллекторного тока изменяется скачком (рис. 4,г).
С увеличением Кж > Кж3 амплитуда / к остается постоянной или незначи­
тельно уменьшается. При уменьшении Кос наблюдается срыв колебаний,
когда значение коэффициента обратной связи становится равным КЖ1.
Для Кж < Кж\ имеется лишь одна устойчивая точка равновесия в начале
координат, поэтому генерирование колебаний становится невозможным.
Таким образом, при жестком по сравнению с мягким самовозбуждением
требуется большее значение Кос.
У сл овие устойчивости фаз. Фазовые углы усредненной крутизны ф5
и коэффициента цепи обратной связи (рос имеют небольшие значения и
практически не зависят от частоты. Поэтому примем ф5 = фос = 0. Тогда
балансу фаз (2) в автогенераторе соответствует равенство фк= 0.
В рассматриваемом случае ба­
ланс фаз выполняется на резо­
нансной частоте coq колебательно­
го контура автогенератора (рис. 5),
т.е. имеется всего лишь одна точ­
ка равновесия. В автогенераторах
с несколькими контурами (или
при учете паразитных контуров)
может быть несколько точек рав­
Рис. 5. Фазочастотная характеристика
новесия. При выявлении условия
контура
устойчивости фаз выведем систему из равновесия (т.е. примем со Ф Шо) и
определим фазовые соотношения между входным напряжением 0 Юи на­
пряжением обратной связи 0 Ж. Если 0 Ж опережает по фазе U m, то энер­
гия во входную цепь автогенератора вносится не в такт с колебаниями, воз­
никшими в контуре, а с некоторым опережением, и частота со генерируемых
колебаний будет возрастать. Если же 0 ОС отстает по фазе от С/вх, то частота
со генерируемых колебаний будет уменьшаться, поскольку энергия в контур
вносится с запаздыванием. Необходимо иметь в виду, что при ш < а>о сопро­
тивление контура имеет активно-индуктивный характер, при аз > Шо — ак­
тивно-емкостный.
Допустим, что баланс фаз нарушен таким образом, что ю < (Оо- Представим
автогенератор схемой замещения в виде источника тока SU B%= / вх, нагру­
женного на активно-индуктивное сопротивление контура (рис. 6,а). В этом слу­
чае напряжение на контуре UK будет опережать ток SU BX = / к на угол ф < 90°
(рис. 6,6). В силу принятых условий (рос = 0, поэтому напряжение обратной
связи U ос совпадает по фазе с напряжением на контуре UK. Так как напряже­
ние обратной связи Ux опережает входное напряжение £/вх, частота со гене­
рируемых колебаний возрастает, стремясь вернуться в точку равновесия COq.
а)
б)
в)
г)
Рис. 6. Выявление условий устойчивости фазы
Если систему вывести из равновесия так, чтобы выполнялось нера­
венство со > Шо, то частота генерируемых колебаний будет уменьшаться, в
чем нетрудно убедиться из рис. 6,в,г. В этом случае напряжение обратной
связи 0 Ж отстает от входного напряжения £/вх и энергия во входную
цепь автогенератора поступает с запаздыванием.
Таким образом, в обоих случаях при нарушении равновесия частота со
генерируемых колебаний стремится вернуться в точку равновесия со().
Следовательно, точка С0о является точкой устойчивого равновесия. Про­
ходящая через эту точку фазочастотная характеристика имеет отрица­
тельный наклон, т.е. условием устойчивости фаз (или частоты генери­
руемых колебаний) является следующее неравенство:
(4)
Эсрк/Эсо<0.
Из изложенного следует, что устойчивость фаз обеспечивает коле­
бательный контур, имеющий в точке равновесия отрицательную крутиз­
ну фазочастотной характеристики. Чем сильнее неравенство (4), тем ста­
бильней частота генерируемых колебаний.
Основные механизмы нестабильности частоты. Баланс фаз (2) выпол­
няется на частоте генерируемых колебаний. Как указывалось выше, фазовые
углы усредненной крутизны ф<; и цепи обратной связи фос имеют небольшие
значения и практически не зависят от частоты. Поэтому обозначим
+ фос= _ Ф- Тогда баланс фаз (2) в автогенераторе запишется в виде
(5)
фк=ф .
Изменение одного из фазовых углов в (5) приведет к изменению час­
тоты генерируемых колебаний, так как на генерируемой частоте баланс
нарушится и будет выполняться на другой частоте. Рассмотрим три ха­
рактерных случая влияния изменения фазовых углов на частоту генери­
руемых колебаний.
Влияние
абсо­
лютного значения ф
на
нестабильность
ч а с т о т ы . Допустим, что (pi
и ф2 изменяются на одинаковую
величину Дф, причем ф, > ф2.
В этом случае, как следует из
рис. 1,а, большему абсолютно­
му значению угла ф соответст­
вует большее изменение часто­
ты генерируемых колебаний,
т.е. ДсО) > Дю2. Это объясняется
меньшей крутизной фазоча­
стотной характеристики конту­
ра при больших значениях ф.
Влияние
ротности
д о б ­
колеба­
тельного
контура
на
нестабильность
ч а с т о т ы . На рис. 1,6 по­
казано, что при изменении фа­
зового угла ф на Дф большей
добротности Q2 соответст­
вуют меньшие Дсо2 отклоне­
ния частоты, т.е. при условии
Qi > Q\ Для отклонений час­
тоты выполняется неравенст­
во Дю2 < Доз,.
Рис. 7. Основные факторы нестабильности
частоты: абсолютное значение ф (а);
добротность Q (б); эталонные свойства
контура (в)
Влияние
параметров
контуров
на
неста­
бильность
ч а с т о т ы . При ф = 0 частоты генерируемых авто­
генератором колебаний совпадают с резонансной частотой колеба­
тельного контура. Изменение параметров контуров (L, С) приводит к
изменению частоты генерируемых колебаний. Это обусловлено, как
видно из рис. 1,в, смещением фазочастотной характеристики контура.
Генерируемые частоты и абсолютный уход частоты определяются по
формулам
~ V Z c’
0)02
J(L + AL)(C + AC) ~ V ZC V
Д1
ДС
21
2С /
AL | АС
Таким образом, для повышения стабильности частоты необходимо:
=> уменьшать абсолютное значение ср = -(ф х+ фос);
=> увеличивать добротность колебательной системы автогенератора;
=> повышать эталонные свойства контуров.
Принципы построения схем автогенераторов. Как уже указыва­
лось, в схемном отношении автогенератор представляет собой усилитель,
охваченный цепью положительной обратной связи. Наиболее часто ис­
пользуются одноконтурные автогенераторы. Поэтому принципы по­
строения автогенераторов рассмотрим на примере обобщенной трехто­
чечной схемы, в которой колебательный контур, составленный из трех
реактивных сопротивлений Х\, Х2 , Х 3, тремя точками подключается к
неинвертирующему или инвертирующему усилителю. Для простоты в
качестве усилителей выбраны каскады с ОБ (рис. 8) и ОЭ (рис. 9). В ли­
тературе обычно рассматривается второй случай. Мысленно разомкнув
входную цепь транзисторов (X на рис. 8,а и 9,а), выявим характер соп ро­
тивлений, при которых выполняется баланс фаз, т.е. напряжение, посту­
пающее по цепи обратной связи на вход усилителя, совпадает по фазе с
входным напряжением. Для колебательного контура на резонансной час­
тоте сумма всех реактивных сопротивление равна нулю:
(6)
Х х+ Х 2 + Х ъ = 0.
Так как сопротивление Х\ значительно меньше сопротивлений Х 2 и X j,
выражение (6) можно представить в виде
(7)
Х 2 = - Х 3.
Как следует из равенства (7), сопротивления Х 2 и Х3 должны иметь
разные знаки, что соответствует условию настройки в резонанс колеба­
тельного контура. В схеме неинвертирующего усилителя с ОБ (рис. 8 ,а)
напряжение с выхода поступает на вход через делитель, составленный из
сопротивлений X], Х\, поэтому сопротивления Х 3 и X i должны иметь оди­
наковый знак. В схеме инвертирующего усилителя с ОЭ (рис. 9,а) напря­
жение с выхода поступает на вход через делитель, составленный из со ­
противлений Х 2, Х\, который должен обеспечивать фазовый сдвиг между
входным и выходным напряжениями 180°, поэтому сопротивления Х 2 и
X] должны иметь разные знаки. Таким образом, независимо от типа уси-
лителя, на основе которого строится автогенератор, для выполнения фа­
зовых условий сопротивления контура Х\ и Х2, Х 2 и Х } должны иметь раз­
ные знаки, а Х\ иХз — одинаковый знак.
х,
L,
Л------h
-T Y W
VT
VT
х 2[
0*
т
VT
"X T
C-, -
т
a>
-
VT
б)
в)
■ v
г)
Рис. 8. Построение автогенератора на основе усилительного каскада с ОБ
На рис. 8,6 и 9,6 изображены схемы автогенераторов (по перемен­
ному току) с емкостной связью, а на рис. 8,в и 9,в — с автотрансформа­
торной связью, построенные на основе усилителей с ОБ и ОЭ. Вид свя­
зи определяется характером сопротивления, включенного между базой
и эмиттером транзистора. Так как в автогенераторе выход усилителя
соединен с входом (т.е. усилитель как таковой исчезает), приведенные
схемы имеют одинаковый вид. Отличие (непринципиальное) наблюда­
ется лишь в схемах автогенераторов с индуктивной связью, изображен­
ных на рис. 8,г и 9,г.
VT
а)
Рис. 9. Построение автогенератора на основе усилительного каскада с ОЭ
На рис. 10 в качестве примера приведены практические варианты
схем автогенераторов с LC-контурами.
На рис. 10,а изображена схема автогенератора с емкостной связью,
построенная на основе усилительного каскада с ОБ, в котором база тран­
зистора VT соединена с общей точкой с помощью блокировочного кон­
денсатора Сбль имеющего весьма малое сопротивление на частоте гене­
рируемых колебаний. Резисторы R\, R2, /?3, R3 обеспечивают режим рабо­
ты по постоянному току базовой цепи транзистора. Их сопротивления
подобраны таким образом, чтобы:
=> в начальный момент для выполнения условий самовозбуждения рабо­
чая точка располагалась на участке характеристики гк = Дм6э) с боль­
шой крутизной;
=> в стационарном режиме для уменьшения средней крутизны и повы­
шения стабильности амплитуды генерируемых колебаний рабочая
точка соответствовала напряжению смещения Еб1 < 0 (в идеале). Для
этой цели в схему дополнительно введены резистор 7?з и блокировоч­
ный конденсатор С5л2.
Рис. 10. Варианты схем автогенераторов с /.С-контурами
Фильтр, составленный из резистора
Лф
и конденсатора
Сф,
служит для
развязки автогенератора от других каскадов по цепи питания.
На рис. 10,6 приведена схема автогенератора с емкостной связью,
построенная на основе усилительного каскада с ОЭ. Отличительной осо­
бенностью схемы является то, что в ней:
=> осуществляется параллельное питание коллекторной цепи через дрос­
сель £др, так как реализации последовательного питания препятствуют
конденсаторы Ссв и Ск. Замена дросселя на резистор нежелательна изза уменьшения добротности колебательного контура, приводящего к
увеличению нестабильности частоты;
=> используется разделительный конденсатор Ср, чтобы отсоединить по
постоянному току базу транзистора от источника питания +Е ;
=> резистор /?,, шунтированный конденсатором Сэ, используется только
для создания напряжения смещения на базе транзистора. В стацио­
нарном режиме напряжение смещения увеличивается за счет базовых
токов, протекающих через Л,.
В схеме автогенератора с автотрансформаторной связью (рис. 10,в) ис­
пользуется последовательное питание как коллекторной, так и базовой цепи.
Кварцевые автогенераторы. Выше указывалось на то, что для повыше­
ния стабильности частоты генерируемых колебаний необходимо увеличи­
вать добротность контуров и повышать эталонные свойства (постоянство
параметров L и С). Этим требованиям в большей степени, чем LC-контуры,
удовлетворяют кварцевые резонаторы, добротность которых составляет де­
сятки и сотни тысяч, а размеры кварцевой пластины (по сути дела L и С)
остаются практическими постоянными при изменении температуры,
давления и других дестабилизирующих факторов. Использование кварца в
качестве колебательной системы в автогенераторе базируется на пьезоэлек­
трическом эффекте. Суть эффекта состоит в том, что под действием высоко­
частотного напряжения, приложенного к металлическим обкладкам резона­
тора, возникают упругие механические
слабозатухающие колебания. На рис. 11
приведены
графическое
обозначение
кварцевого резонатора, его электриче­
ская схема замещения в виде колеба­
тельного контура и зависимость с о ­
противления от частоты. Как видно
Рис. 11. Кварцевый резонатор (а),
его схема замещения (б)
и частотная характеристика (в)
из рис. 11,в, кварцевый резонатор
имеет две резонансные частоты. Пер­
вая из них С0 | соответствует последо­
вательному резонансу, вторая ш2 —
параллельному резонансу, обусловленному наличием емкости С„ выво­
дов кварцедержателя. Эти частоты близки друг к другу.
При построении схем автогенераторов кварц используется как:
индуктивность L трехточечной схемы на генерируемых частотах, удов­
летворяющих неравенству со, < ю < а>2. В качестве емкости кварц исполь­
зовать нецелесообразно, так как при выходе из строя кварца автогенера­
тор может продолжать работать, генерируя совсем другую частоту;
=> последовательный контур на частоте 0)i в цепи обратной связи.
При построении автогенераторов по трехточечной, так называемой осцилляторной, схеме кварц может быть включен между коллектором и базой
(емкостная трехточечная схема), между базой и эмиттером, коллектором и
эмиттером (автотрансформаторная трехточечная схема). На практике чаще
всего используется емкостная трехточечная схема (рис. 12, а). Она отличает­
ся конструктивной простотой (не требует дополнительных индуктивностей),
легкостью настройки и наиболее высокой стабильностью частоты (кварц не
шунтируется, как в других схемах, сопротивлением).
Использование кварца в качестве последовательного контура основа­
но на том, что модуль его сопротивления при отклонении от резонансной
частоты о >1 резко возрастает. Поэтому при включении кварца в цепь о б ­
ратной связи положительная связь существует только на частотах, близ­
ких к а>1. Схема автогенератора с использованием кварца в качестве по­
следовательного контура приведена на рис. 12,6. Автогенератор построен
на основе неинвертирующего усилительного каскада с ОБ. Поэтому
кварц включен непосредственно между выходом и входом усилителя.
В схеме нейтрализовано вредное действие емкости С„ выводов кварцедержателя, из-за которой возможно генерирование паразитных колебаний
на очень высоких частотах со, так как lim 1/(шСв) —> 0 . При выборе ем­
кости нейтрализации С„ = С„ через Сн и С„ кварцевого резонатора проте­
кают токи, создаваемые противофазными напряжениями полуобмоток
контурной катушки индуктивности LK. Эти токи вычитаются в узле 1 и не
попадают во входную цепь транзистора.
Рис. 12. Схемы кварцевых автогенераторов: с включением кварца
между коллектором и базой (о) и в цепь положительной обратной связи (б)
10.2. П ер ем н о ж и тел и анал о го в ы х сигналов
О способах перемножения аналоговых сигналов. П е р е м н о ж и ­
т е л и аналоговых сигналов (ПАС) предназначены для получения вы­
ходного сигнала в виде произведения двух изменяющихся во времени
входных напряжений и\ и и2: нвых = Кми\Хи2, где Км= const — масштабный
коэффициент. В радиотехнических применениях ПАС перемножаемыми
сигналами являются гармонические функции с постоянными или мед­
ленно меняющимися амплитудой, частотой, фазой. В качестве результата
перемножения используется составляющая с разностной или суммарной
частотой. Аналоговые перемножители обеспечивают минимальное коли­
чество побочных спектральных составляющих, поэтому служат основой
для построения широкого класса различных узлов радиоэлектронной ап­
паратуры: преобразователей и умножителей частоты, амплитудных, фа­
зовых и частотных модуляторов и детекторов, синтезаторов частот и др.
Следует выделить три основных способа перемножения аналоговых
сигналов.
Перемножение
с использованием
операций
логарифмирования
и
антилогарифмирования.
Этот сп особ реализуется с помощ ью операционных усилителей по
следующ ем у
(рис. L):
алгоритму
=> сигналы и\ и м2 с помо­
щ ью
логарифмирую­
щих схем на операци­
онных усилителях DA\,
DA2
преобразуются
напряжения,
^
циональны е
в
пропор-
‘
'
логариф-
п
, г,
Рис. 1. Перемножение сигналов с использованием
логарифмирования и антилогарифмирования
мам U In ки\, U In ки2,
гд е й — коэффициент, имеющий размерность 1/В;
=> в схем е на операционном усилителе DA3 осуществляется сложение
полученных напряжений U (In ки\+\п ки2), в результате чего формиру­
ется напряжение, пропорциональное логарифму произведения двух
сигналов С/In 1?и\и2ш
,
=> с помощ ью схемы на операционном усилителе ОЛ4 выполняется опе­
рация антилогарифмирования, и на ее выходе получается напряжение,
пропорциональное произведению двух сигналов U кги\и2.
Перемножение
сигналов
на
нелинейных
э л е м е н т а х . Этот способ находит наиболее широкое применение при
построении функциональных узлов радиоэлектронной аппаратуры и име­
ет различные схемные реализации.
В простейшем случае используется один элемент с нелинейной харак­
теристикой в виде степенного ряда или полинома (рис. 2,а)
(1)
/ = F(u) = а0 + а\и + а2и2+ а^и3+ ...
Если на такой элемент подать напряжение и = Е + и\ + и2, то в отклике
тока будут присутствовать составляющие вида Ст„и "и ” , где Ст„ = const;
т , п - 0, 1, 2, 3,... Помимо полезного продукта (т = п = 1) в отклике тока
содержатся побочные составляющие. Для снижения их уровня принима­
ют следующие меры:
=> уменьшают амплитуды перемножаемых сигналов |Н||т ах, Мтах, чтобы
уменьшить влияние членов характеристики (1) со степенями выше
третьей;
=> используют несколько (два, четыре) нелинейных элементов для ком­
пенсационного подавления токов, создаваемых линейным членом а\и
характеристики (1);
Однако принятые меры не позволяют устранить в отклике тока со ­
ставляющее а2и\ и а2и] . Более совершенными перемножителями на
элементах
нелинейных
устройства,
являются
отдельные
имеющие
входы для перемножае­
мых сигналов.
Рассмотрим особенно­
сти такого перемножителя
С)
i = F (u )
а)
-Q
на примере дифференци­
ального каскада (ДК),
схема которого изображе­
на на рис. 2,в. Воспользо­
вавшись выражениями (4)
6)
Рис. 2. Способы перемножения: на нелинейных
элементах (а); параметрический способ (б);
с использованием дифференциального каскада (в)
параграфа 9.5, представим
выходное напряжение в виде
(2)
ит = RK(7к1 - / к2) = a 0RKЛ(0,5и, / (рТ)и2 /Я э
При и I/фт —> 0 получаем
( 3)
«(А
2ф А
Параметрический
способ
п е р е м н о ж е н и я . Если
на вход параметрического четырехполюсника ПЧ (рис. 2,б> воздействует
напряжение щ, а коэффициент передачи изменяется по закону напряже­
ния и г.К = K0(l+ku2), то напряжение на выходе четырехполюсника
мВых = K u i = K 0 Ui(l +ки2)
содержит составляющую, пропорциональную произведению и\ х и2.
В качестве параметрического четырехполюсника мож ет служить тот
же дифференциальный каскад с генератором стабильного тока (рис. 2,в),
так как его коэффициент передачи зависит от крутизны передаточной
характеристики. Используя (5) параграфа 9.5 и учитывая, что / 0 = u2/R3,
можно получить следующее выражение для выходного напряжения:
“ (Л
-им
«вых = 2 SRKti\ = \и 2
2фтЛэсЬ2(0,5м, /ф т)
Из (4) при г/1/фт—> 0 следует (3).
В заключение отметим, что:
параметрический сп особ перемножения, по сути дела, отражает
другой возможный подход к моделированию ПАС, та.к как парамет­
рические четырехполюсники всегда реализуются ма нелинейных
элементах;
=> моделирование ПАС параметрическим четырехполюсником дает в
общем случае результаты (4), отличающиеся от результатов (2), по­
лученных при рассмотрении этой же схемы как перемножителя на не­
линейных элементах;
=> наиболее высокую точность перемножения обеспечивает способ с
использованием операций логарифмирования и антилогарифмирова­
ния, который реализуется на операционных усилителях, выполненных
в виде самостоятельных интегральных схем. По этой причине в даль­
нейшем рассматриваются ПАС на основе дифференциальных каска­
дов, которые образуют самостоятельный класс интегральных схем.
Д войные балансные схемы ПАС. Узкий динамический диапазон,
определяемый условием И|/срг —> 0, является одним из недостатков рас­
смотренного перемножителя на дифференциальном каскаде (ДК) с гене­
ратором стабильного тока, выполненного по схеме на рис. 2,в. Другой
недостаток состоит в том, что напряжение и2 содержит постоянную со ­
ставляющую. Поэтому в результате перемножения выходной сигнал все­
гда содержит составляющую напряжения, пропорциональную и\. Для
устранения второго из указанных недостатков перемножители строят на
двух ДК, включенных по балансной (дифференциальной) схеме (рис. 3).
Определим выходное напряжение такого ПАС.
Запишем выражения для токов /|-г-/6 по аналогии с выражениями (4) из
параграфа 9.5:
(5)
/ 5 = О,5а0/0 [1 + th(0,5w2/(p,)]; / 6 = 0,5а0 / 0[1 - th(0,5w2/cpT)];
(6)
/, = О,5ос0 h[ 1 + th(0,5w,/<p,)]; / 2 = 0,5ао / 5[1 - th(0,5w,/(pT)];
(7)
/ 3 = 0,5ао / 6[ 1 + th(0,5wi/<p,)]; / 4 = 0,5а0 /„ [1 - th(0,5M2/cpn)];
Выразим напряжение на выходе перемножителя через токи / i-s7 4
(рис. 3):
«ВЬ1Х= [(/, + / 3) - ( / 4 + h ) R = [ ( / , - 1 2 У~ ( h - /3 ) R ■
(8)
Подставив в (8) сначала (6), (7), а затем (5), получим:
(9 )
2фт
2фт
При г^/ф, —> 0, и2/фт—» 0 выражение (9) приобретает вид
(Ю)
«вых= ^ ^Л * »
4ф ;
ВЫХ
Следует отметить, что в (9), (10) напряжения и\ и и2 не содержат по­
стоянных составляющих. Поэтому на выходе таких перемножителей от­
сутствуют переменные составляющие с частотами перемножаемых сиг­
налов, что облегчает фильтрацию выходного напряжения в функцио­
нальных узлах, построенных на основе перемножителей. Такие перемножители называют четырехквадрантными, так как позволяют перемно­
жать входные напряжения любого знака.
Схема на рис. 3 не обеспечивают высокой точности перемножения
сигналов с большими амплитудами. Для повышения уровня перемно­
жаемых сигналов в перемножитель вводят логарифмирующую ступень
(рис. 4), выполненную на транзисторах VTU VT2, в коллекторной цепи
которых включены диоды VD\, VD2, с двумя генераторами стабильного
тока /qi . В качестве второй ступени используется рассмотренная выше
схема перемножителя (рис. 3) с двумя генераторами тока и резистором
R32, повышающими качество перемножения.
В результате анализа схемы на рис. 4 получено следующее выражение
для напряжения на выходе двухступенчатого перемножителя [28]:
м,м2 .
^1^2^01
на двух дифференциальных
каскадах
перемножителя с логарифмической ступенью
И нтегральны е П АС. Следует выделить два вида микросхем аналого­
вых перемножителей: перемножители общего применения и инструмен­
тальные перемножители [28].
Перемножители
общего
применения
выполня­
ются по простой схеме, имеют низкую точность перемножения и линей­
ность характеристик до напряжений сигналов не более 10 мВ. Один из
дифференциальных входов перемножителя носит название сигнального,
другой — опорного. Основными параметрами перемножителей общего
применения являются:
=> рабочий диапазон частот (от 0 до предельной частоты в несколько
сотен мегагерц, на которой ослабление входного и опорного сигналов,
проникающих на выход перемножителя, ниже нормы);
=> крутизна преобразования при заданной амплитуде опорного напря­
жения, представляющая собой следующее отношение: S„ = / BbIxi/£/BXс,
где / вых] — амплитуда первой гармоники выходного тока преобразо­
ванной частоты; £/вх с — амплитуда напряжения входного сигнала си­
нусоидальной формы;
=> крутизна передачи входного (5С= / ВЬ1ХJUm с) и опорного (S0 = / вых „ /С/вх „)
сигналов;
=> коэффициенты ослабления входного (Кх с = SJ S„) и опорного (Кж0 = S0/ S„)
сигналов;
=> коэффициент шума по сигнальному входу;
=> максимальные допустимые значения входного (t/cmax) и опорного ( U0max)
сигналов;
=> входное сопротивление.
В качестве примера на рис. 5 приведена схема двойного балансного
смесителя, построенная на интегральном перемножителе К174ПС4.
Перемножительным узлом микросхемы являются два ДУ с перекрест­
ными связями на транзисторах VT\, VT3, VT4, VTb. На базы спаренных
транзисторов подаются опорные напряжения с входов смесителя ВхоЬ
Вхо2 через конденсаторы С ь С2. Напряжения сигнала поступают на базы
транзисторов VT2, VT5 с сигнальных входов ВхсЬ Вхс2 через конденсаторы
С3, С4 и изменяют эмиттерные токи транзисторов перемножительного
узла. Резисторы R2, / ? з позволяют увеличить крутизну преобразования.
Стабилизатор напряжения на резисторе
и диодах VD\+ VD4 совместно
с резисторами
задает режим работы смесителя по постоянному то ­
ку и обеспечивает его стабильность. Нагрузкой смесителя служит коле­
бательный контур, настроенный на промежуточную частоту, равную раз­
ности частот опорного напряжения и сигнала.
Инструментальные
п е р е м н о ж и т е л и имеют высо­
кую точность перемножения и узкий рабочий диапазон частот (не более
единиц мегагерц). Их основные области применения — аналоговые ЭВМ
и обработка низкочастотных сигналов. Наиболее важными параметрами
инструментальных перемножителей являются:
=> масштабный коэффициент Км = Э'мвь1|< /Эм,Эи2 . Обычно А'м = 0,1 1/В,
тогда при Mi = м2 =10 В выходное напряжение ивых =10 В;
максимальные значения входного и выходного напряжения (обычно
10... 15 В), при которых точность умножения Д = (ивых - Км U\U2)luBm
не хуже заданной;
параметры, приведенные выше для перемножителей общего применения;
параметры, характерные для операционных усилителей (входной ток сме­
щения, разность входных токов смещения, напряжение смещения и др.).
Вых
пч
Рис. 5. Схема интегрального балансного смесителя К174ПС4
На рис. 6 иллюстрируются особенности схемы инструментального пе­
ремножителя К525ПС1 и его использования в типовом включении.
Перемножитель построен по двухступенчатой схеме и имеет незначи­
тельные отличия от рассмотренного выше перемножителя на рис. 4. Ка­
ждая ступень содержит:
=> дифференциальный каскад на составных транзисторах РТЬ VT2 и VT3,
VT4 , включенных по схеме Дарлингтона;
=> два генератора стабильного тока на транзисторах VT5, VTb с цепями для
установки токов х- и ^каналов, составленными из транзистора VT7в диод­
ном включении, внутреннего R3и внешних Rm /?„, Rnk резисторов;
=> выводы для подключения внешних резисторов Rx, Ry, которые, как по­
казано выше, служат для линеаризации токов.
Отличие ступеней состоит в том, что нагрузкой ДК первой ступени
служат логарифмирующие транзисторы VTH, VT9 в диодном включении, а
нагрузкой ДК второй ступени — четырехквадрантный перемножительный узел на транзисторах УТ10+УТц. Предварительное логарифмирование
сигнала по у-входу позволяет получить линейную зависимость произве­
дения на выходе перемножителя для сигнала Uv.
Перемножаемые сигналы U„ Uy подаются на неинвертирующие входы хи j -каналов перемножителя. На инвертирующие входы х- и ^-каналов пода­
ются постоянные напряжения с потенциометров Rlt Rl0. Типовое включение
ИМС позволяет осуществить четырехквадрантое перемножение входных
напряжений с уровнем ±10 В при амплитуде выходного напряжения ±10 В.
Совместно с операционными усилителями перемножители аналого­
вых сигналов могут быть использованы для операций деления, извлече­
ния квадратного корня, выделения тригонометрических функций.
Рассмотрим другую область применения перемножителей.
Преобразователи частоты. Эти устройства являются неотъемлемой ча­
стью супергетеродинных радиоприемников. П р е о б р а з о в а т е л ь
частоты
(ПЧ) предназначен для линейного переноса спектра входного
сигнала радиоприемного устройства на промежуточную (как правило, более
низкую) частоту с сохранением закона изменения модулирующей функции,
заложенной в высокочастотное колебание в передатчике. В процессе преоб­
разования частоты входной сигнал ивх = £/с • cos(oy + фс) преобразуется в
выходной сигнал
(11)
и вык
А^цч U q c o s (с о п/ + ф с)»
где Uc= Uc0+AU{t), сос = шс0 + Лсо(/), Ф с = Фсо + Аф (0 — амплитуда, частота
и фаза сигнала; АГПч — коэффициент передачи ПЧ; соп— промежуточная
частота; A U{t), Дсо(?), Аф(0 — модулирующие функции.
К основным показателям преобразователя частоты относятся:
=> коэффициент передачи (усиления), который определяется при посто­
янных параметрах входного сигнала как отношение амплитуды Un
выходного напряжения ПЧ с промежуточной частотой к амплитуде Uc
входного сигнала: А"Пч = UJUC. Вместо коэффициента передачи часто
пользуются крутизной преобразования, равной отношению амплиту­
ды тока с промежуточной частотой к амплитуде напряжения входного
сигнала: Snp = I„/U c',
=> уровень выходных колебаний с комбинационными частотами, рав­
ными промежуточной частоте соп или близкими к ней. Комбинаци­
онные частоты образуются в результате перемножения входных
колебаний ПЧ как алгебраическая сумма /-й гармоники полезного
сигнала, /w-й гармоники помехи и п-й гармоники гетеродина, т.е.
со /тл = |/шс ± ± тсопом ± псог |, где I, т, п — целые числа, включая 0.
Наиболее опасными из помех являются колебания так называемого
зеркального канала с частотой созк = шг ± со „ , расположенной по
другую сторону (зеркально) от частоты гетеродина по отношению
частоты полезного сигнала (со с = со г + со п). Если не принять мер
по ослаблению колебаний зеркального канала, то они преобразу­
ются на промежуточную частоту и в дальнейшем от них не изба­
виться. Комбинационные частоты щ тп ~ соп проявляются в виде ин­
терференционных свистов;
=> диапазон рабочих частот, который определяется диапазоном частот
приемника. При этом постоянство промежуточной частоты обеспе­
чивается совместной перестройкой сигнального и гетеродинного
контуров;
входное сопротивление на частоте сигнала, выходное сопротивление
на промежуточной частоте, коэффициент шума, частотные и нели­
нейные искажения и др.
Принципы
построения
ПЧ. В основе преобразования
частоты лежит операция перемножения двух косинусоидальных функций:
(12)
cos х cos у = 0,5 [cos (х + у) + cos ( х - у ) ] .
П оэтому в состав преобразователя частоты входят:
=> источник гармонических колебаний с частотой юг, называемый гете­
родином;
=> перемножитель сигналов (12), называемый смесителем;
=> фильтр, для подавления побочных продуктов преобразования.
При перемножении сигналов (12) на нелинейных элементах наилуч­
шей с точки зрения качества выполняемой операции является квадратич­
ная характеристика, например / = А и2. При воздействии на элемент с та­
кой характеристикой суммы напряжений сигнала и гетеродина
и = ис + иГ= Uc cos (a y + фс) + U, cos ( с у + ср,)
в результате перемножения исхиг в отклике появляется спектральная со ­
ставляющая
(13)
AUJJ Tcos [(сос - сог) t+ фс- фг]
Сопоставление (13) с требуемым выходным сигналом (11) показывает,
что в результате преобразования частоты на нелинейном элементе с
квадратичной характеристикой сохраняются законы изменения амплиту­
ды MJ(t), частоты Дсо(/) и фазы Аф(/) сигнала. Однако в спектре тока по­
мимо полезного продукта преобразования присутствуют составляющие с
частотами сос + сог, 2юс и 2сог. Для их подавления ПЧ должен содержать
фильтр, настроенный на промежуточную частоту.
Когда характеристика нелинейного элемента имеет вид степенного
ряда и на входе ПЧ помимо полезного сигнала присутствует помеха:
=> в спектре тока содержатся составляющие с различными комбина­
ционными частотами соЫп = |/сос ± отсо1Ю
М± п(Лг |;
=> нарушается закон изменения амплитуды колебаний с промежуточной
частотой. Это обусловлено тем, что амплитуда колебаний с промежу­
точной частотой представляет собой сумму слагаемых, содержащих
величины U ;(t), U ^(t ),...
В настоящее время в качестве смесителя преобразователей частоты
часто используются рассмотренные выше аналоговые перемножители.
Пример такого схемного решения приведен на рис. 5.
Использование инструментальных аналоговых перемножителей по­
зволяет увеличить амплитуды напряжений сигнала и гетеродина до
10...15 вольт. Однако им присущ ряд недостатков: сравнительно низкая
максимальная рабочая частота; большое количество навесных элементов;
наличие в спектре выходного напряжения составляющей с суммарной
частотой сигнала и гетеродина.
Рассмотрим схему преобразователя частоты (рис. 7) с компенсацион­
ным способом подавления зеркального канала и побочных спектральных
составляющих. На схеме обозначено: Г — гетеродин; х — идеальный
аналоговый перемножитель; + — сумматор; Фс, Фг, Фп — фазовращатели
входного сигнала, колебаний гетеродина и промежуточной частоты.
Будем полагать, что на входы смесителя поступают
(14)
ивх= U +cos [(со,- +юп)/ + ср+] + U “cos [(сог -сопУ + ф“] ,
ur=U rcos (со,/ + ф г).
Воспользовавшись соотношениями (14) и (12), запишем для схемы на
рис. 7 выражение выходного напряжения
(15)
+ K MU U rcos
ф _ф
Ф —Ф + Ф
ивых= К ми +и гс 0 8 - ^ — ^------ -c o s о у + ф
Ф„ +Ф „ + Ф„
+ф
-Ф г +-
Ф„ + ф„ + Ф п
-cos ( 2 w r + м п ) / + ф + + ф г + -
- ф +ф +ф
- Ф „ + Ф Г +Ф „
+ K MU~Urcos------£------ 1------ —cos о у - ф ' + ф г + -
+ K MU U rcos
ф +Фг+Фп
-cos (2 с о г - с о п У + ( { Г + < р г +
ф
„+
ф п+ ф
„
где К м — масштабный коэффициент.
Как следует из выражения (15), оба входных колебания (14) созда­
ю т на выходе ПЧ составляющие напряжений с промежуточной часто­
той ю,„ а также составляющие с комбинационными частотами 2оог ± со,,.
Задача состоит в определении фазовых сдвигов Фс, Фг, Фп фазовра­
щателей, при которых на выходе ПЧ остается только одна из состав­
ляющих напряжения с промежуточной частотой, а остальные состав­
ляющие подавляются.
Рис. 7. Схема преобразователя частоты с компенсационным сп особом подавления
побочных колебаний
Рассмотрим д в а
случая.
1.
сос > сог. В этом случае нужно выделить составляющую с частотой
сос = шг + (ош подавить составляющую зеркального канала с частотой Шз =
сог - соп и комбинационные составляющие с частотами 2сог + со„ и 2сог - соп,
поэтому должны выполняться условия
Фс - Фг+ Фп = 0; Фс + Фг+ Фп = ± я ; -Ф с + Фг+ Ф„ = ±71.
Из системы уравнений находим Фс = 0; Фг = ±л/2; Фп= ±п12.
а)
б)
Рис. 8. Схемы бесфильтровых преобразователей частоты
2.
шс < сог. В этом случае нужно выделить составляющую с частотой
шс = со, - соп, а подавить составляющую зеркального канала с частотой
C0j = со, + соп и комбинационные составляющие с частотами 2сог + соп и
2ш, —со,,, поэтому должны выполняться условия
Фс - Фг+ Фп = ±я; Фс + Фг+ Фп = ±я; -Ф с + Фг+ Фп = 0.
Из системы уравнений находим Фс = ±л/2; Фг= 0; Ф „= ±л/2.
Схемы бесфильтровых ПЧ для обоих случаев приведены на рис. 8. Их
достоинство — подавляется зеркальный канал.
10.3. М одуляторы
Общ ие сведения. Средством доставки информации по каналу связи яв­
ляется высокочастотное гармоническое колебание
(1)
u№
(t) = и шcos (со/ + ф) = Umcosd(/),
параметрами которого являются амплитуда Um частота со и фаза ср.
Передаваемое сообщение должно быть «загружено» в средство доставки.
Для доступности излагаемого материала в качестве сообщения, или управ­
ляющего сигнала, примем низкочастотное гармоническое колебание (тон)
(2)
ua(t) = Ua cos Sit.
Для «загрузки» информации в средство доставки достаточно изменять
один из параметров Uu„ со, ср колебания (1) по закону (2). Процесс изме­
нения параметров высокочастотного гармонического колебания по зако­
ну передаваемого сообщения (2) называется модуляцией. Рассмотрим
особенности основных видов модуляции.
А м п л и т у д н а я м о д у л я ц и я . При амплитудной модуляции
(A M ) для упрощения записей принимаем в (1) ф = 0. По закону переда­
ваемого сообщения изменяется ампли­
туда высокочастотного колебания (1):
(3)
t/щ (?) = U0 + Ua cos Q.t =
= t/0(l + m cos £2/)>
где m = U J U 0 — коэффициент (глубина)
AM, характеризующий пределы измене­
ния амплитуды колебания (1); Uo — ам­
плитуда несущего колебания с частотой
со = со0при отсутствии сообщения (Ua =
0); при отсутствии искажений т < 1.
Подставив (3) в (1), получим выраже­
ние для АМ-колебания:
(4) мАМ(0 = Uni 1 + т cos £lt) cos (О0? =
= Uо cos о}0/ + 0,5 mi!0cos (со0 +S2)/ +
+ 0,5 mUo cos (coo - Q)t.
На основании (4) АМ-колебание мо­
'
Щ(Г-П ШЬ Wo+Q (О
Рис. 1. Временное (а) и
спектральное (б) представление
АМ-колебаний
жет быть представлено в двух формах: во
временной (рис. 1,а) и спектральной
(рис. 1,6). Как следует из рис. 1,а, закон
W
1
передаваемого сообщения отображает
огибающая АМ-колебания. Спектральная
форма представления АМ-колебания позволяет судить о требуемой полосе про­
пускания канала передачи.
Фазовая
м о д у л я ц и я . При фазовой модуляции (ФМ) по за­
кону передаваемого сообщения изменяется фаза высокочастотного колеба­
ния (1):
(5)
ф(?) = ф0 + к ua(t) = ф0 + kUn cos Q.t = ф0 + Аф cos Q.t,
где к = const; Аф — индекс фазовой модуляции.
После подстановки (5) в (1) получаем выражения для ФМ-колебания:
(6)
МфМ ( t) = ишcos (ft)0r + Аф cos £2/ + ф0) = Umcosb(t).
Как следует из (6), частота ФМ-колебания изменяется по следующему
закону:
(7)
со^) = — = со0 - Дф£2 sin Qt - со0 - Дсо sin Q.t , т.е. Дсо = Дф £2.
dt
Ч а с т о т н а я м о д у л я ц и я . При частотной модуляции (ЧМ ) по
закону передаваемого сообщения изменяется частота колебания (1):
(8)
ш(У) = со0 + К ua(t) = со0 + К Ua cos Qt = too + Дсо cos Qt,
где К = const; Дсо — девиация частоты (максимальное отклонение от со0).
После подстановки (8) в (1) получаем выражение для ЧМ-колебания:
(9)
мчм(0 = UQc o s (со0t + Дсо cos Qt + ф0).
Используя (8), найдем закон изменения фазы:
(10)
в = jto(f)<# = |(со0 + Дсо cosQ t)dt = со0/ + - ^ s i n Q / + ф0,
Дсо
т.е. Дф = -----.
Q
Полученные соотношения позволяют сделать ряд важных выводов
для ФМ- и ЧМ-модуляции:
=> фазовая модуляция сопровождается частотной, при этом девиация часто­
ты Дсо прямо пропорциональна частоте £2 передаваемого сигнала (7);
=> частотная модуляция сопровождается фазовой, при этом индекс фазо­
вой модуляции Дф обратно пропорционален частоте £2 передаваемого
сигнала (10);
=> в спектре ФМ- и ЧМ-колебаний содержится бесчисленное множество
боковых частот Шо ± и£2. В этом нетрудно убедиться, если входящие
(6), (9) косинусы представить в виде степенного ряда
cos х = 1 - х 2И +
х
4/ 4 !
—хб/6 ! +•••
и перемножить соответствующие члены.
Рассмотрим вопросы схемной реализации основных видов модуляции.
Амплитудны й модулятор. Известно много способов осуществления
амплитудной модуляции. Рассмотрим схемную реализацию способа мо­
дуляции изменением смещения в базовой цепи транзистора.
Построение
статической
модуляционной
х а р а к т е р и с т и к и . Для этого воспользуемся проходной характери­
стикой транзистора в виде функции коллекторного тока от напряжения на
базе (рис. 2,а). Статическая модуляционная характеристика для рассмат­
риваемого случая представляет собой зависимость амплитуды коллекторно­
го тока первой гармоники / к, от напряжения смещения на базе Е6 при воз­
действии на базу транзистора высокочастотного напряжения с постоянной
амплитудой Um= const (рис. 2,а). На рис. 2,6 показана форма коллекторного
тока при изменении напряжения смещения на базе Е5 = var. С уменьшением
|£б| увеличивается амплитуда импульсов коллекторного тока, имеющих ко­
синусоидальную форму. Затем рост амплитуды прекращается, и в импульсах
появляется провал. Следовательно, с уменьшением |£б|также будет увеличи­
ваться амплитуда первой гармоники коллекторного тока / к1, а с появлением
провала — рост прекратится и начнется уменьшение / к1. Статическая моду­
ляционная характеристика приведена на рис. 2,в в виде функции / к1 = F(E6).
Она не только объясняет принцип и возможность осуществления амплитуд­
ной модуляции, но и позволяет выбрать режим работы транзистора с мини­
мальными искажениями, а также показывает путь схемной реализации ам­
плитудного модулятора.
Напряжение смещения на базе транзистора Ет при отсутствии управ­
ляющего сигнала (передаваемого сообщения) должно соответствовать
середине линейной части статической модуляционной характеристики.
Максимальная амплитуда управляющего сигнала £/Птах выбирается из
соображений работы в пределах линейного участка (рис. 2,в).
Рис. 2. Построение статической модуляционной характеристики (а, б, в)
и схемная реализация амплитудного модулятора (г)
С х е м н а я р е а л и з а ц и я м о д у л я т о р а . В приведенной на
рис. 2 ,г схеме модулятора подача высокочастотного колебания иоп управ­
ляющего сигнала
uq
и напряжения смещения £бо осуществляется с использо­
ванием фильтрового способа. Все указанные напряжения присутствуют на
базе, их источники «не мешают» друг другу. Действительно:
=> для высокочастотного колебания сопротивление конденсатора выби-
рается близким к нулю: 1/(соС]) —> 0. Поэтому можно считать, что ис­
точник высокочастотных колебаний (вторичная обмотка трансформа­
тора Т\) подключен между базой и эмиттером транзистора VT\
=> для низкочастотного управляющего сигнала 1/(£2С|) —> <», Щ ,Т|
о
(благодаря малому значению £2), 1/(£2С2) —> 0 (благодаря большому
значению емкости С2). Поэтому можно считать, что источник управ­
ляющих сигналов также подключен непосредственно между базой и
эмиттером транзистора VT\
=> сопротивление вторичных обмоток трансформаторов Ти Т2 постоян­
ному току можно считать равным нулю, поэтому смещение Е 60 пода­
ется непосредственно на базу VT.
В коллекторную цепь модулятора включен колебательный контур, на­
строенный на частоту Юо несущего колебания. Он предназначен для вы­
деления несущей и двух боковых полос АМ-колебания. Остальные со ­
ставляющие подавляются.
П р и н ц и п р а б о т ы . При отсутствии управляющего сигнала че­
рез транзистор протекает коллекторный ток с амплитудой / к|0, соответст­
вующей напряжению смещения Еъ0 (рис. 2 ,в), или выбранной рабочей
точке. С выхода амплитудного модулятора снимаются колебания несу­
щей частоты (с постоянной амплитудой). С появлением управляющего
сигнала напряжение смещения на базе начнет изменяться, перемещая
рабочую точку по статической модуляционной характеристике, что вызо­
вет изменение амплитуды высокочастотных колебаний.
Ф а зов ы е модуляторы. Рассмотрим два способа реализации фазовых
модуляторов (ФМ).
ФМ
с управляемой
ФЧХ контура.
Известно, что с
изменением частоты от 0 до колебательный контур обеспечивает сдвиг фазы
от + 7t/2 до —п/2. На рис. 3,а,б приведены фазочастотные характеристики (ФЧХ)
и амплитудно-частотные характеристики (АЧХ) колебательного контура для
трех резонансных юь о>>, а>з. Если выбрать частоту несущей (Do = (Ог и путем
перестройки изменять резонансную частоту контура в пределах (О1...Ш3, то
можно получить изменение фазы от —Дф до +ДФ (рис. 3,а). Из-за неравномер­
ности А Ч Х контура фазовая модуляция сопровождается паразитной ампли­
тудной модуляцией. На рис. 3,6 показаны пределы изменения амплитуды.
На рис. 3,в приведена схемная реализация описанного способа с ис­
пользованием для перестройки контура варикапа VD, подключенного к
контуру через небольшую емкость С\. Напряжение смещения Есм на ва­
рикап подается через резисторы R t, R2. При отсутствии управляющего
сигнала ( иа = 0) резонансная частота контура с учетом варикапа равна ЮгРезистор Ri предназначен для того, чтобы источник управляющих сигна­
лов не оказывал влияния (не шунтировал) на колебательный контур.
б)
Рис. 3. Осуществление фазовой модуляции путем перестройки контура (а, 6)
и его реализация (в)
ФМ
cos ш
2U
U
со
сложением
двух
АМ-
к о л е б а н и й . При этом способе исходными
данными служат два модулированных по ампли­
й?=0; 2л
£,,£2г=0,5я; 1,5л
туде колебания:
u\{t) = £/]( 1 + т cos Q.t) cos Ш\ u2(t) =
Q (=л
и
IV sin°*
Рис. 4. Осуществление
фазовой модуляции
сложением
АМ -колебаний
= f/2( l - m cos Qt) sin Ш.
Найдем результирующее колебание как сумму
двух колебаний при следующих условиях:
U\ = U2 - U \ m = \ для Q,t = 0; 0,5я; л; 1,5л; 2л.
Результаты суммирования приведены на рис. 4
в виде вектора, вращающегося против часовой
стрелки с частотой со. Из рис. 4 следует, что:
—> результирующий вектор изменяет свое положение в пределах угла,
равного 0,5л, с частотой управляющего сигнала £2. Следовательно, ре-
зультирующее колебание промодулировано по фазе. Для неискажен­
ной ФМ индекс фазовой модуляции составляет Дф = 0,25л;
=> фазовая модуляция сопровождается амплитудной.
C/sin и /
и,(г)
И|(/) + 1/ 2(0
C/cos ш/
Рис. 5. Схема фазового модулятора с использованием
двух амплитудных модуляторов
На рис. 5 показана схемная реализация рассматриваемого способа.
Помимо основных узлов (генератора, фазовращателя, двух амплитудных
модуляторов и сумматора) в схеме используются:
=> умножитель частоты, позволяющий увеличить индекс фазовой м о­
дуляции Дф в целое число раз;
=> амплитудный ограничитель, предназначенный для ослабления пара­
зитной амплитудной модуляции.
Ч астотны е модуляторы. Рассмотрим два широко распространенных
способа осуществления частотной модуляции.
К о с в е н н ы й с п о с о б . При косвенном способе для получения
ЧМ-колебаний используется фазовый модулятор. Основой для такой
возможности является взаимосвязь между частотой и фазой:
db
со = —
.
dt
Покажем, что это так.
Будем полагать, что:
=> управляющий сигнал изменяется по закону (2);
=> на вход фазового модулятора подается предварительно проинтегриро­
ванный сигнал (2), т.е.
IC и
мвхфм(*) = К Иj u a cos Q.tdt = — ^-^-sin Q t , где K„ =const.
Тогда по аналогии с (5), (6), (7) получаем следующие законы измене­
ния фазы, напряжения и частоты на выходе ФМ:
ф (0 = ф 0 + к и „ф м (0 = Фо + ■
^ £ L s in Qt = ф 0 + Л ф S in Q / ;
ИфМ (0 = и шcos (Шо/ + kKQ * sin Qt + Фо)= Uu> cos d(,);
(11)
m(t) =
= со0 + kKJJa cos Q.t = со0 + Aw cos Q.t.
dt
Из выражения (11) следует, что частота на выходе ФМ изменяется по
закону управляющего сигнала (2).
На рис. 6,о приведена схемная реализация рассмотренного способа
частотной модуляции.
Достоинство косвенного способа — сохраняется стабильность часто­
ты (Do автогенератора.
П р я м о й с п о с о б . Этот способ состоит в непосредственном из­
менении резонансной частоты колебательного контура автогенератора,
определяющего частоту генерируемых колебаний. Его реализация с ис­
пользованием варикапа показана на рис. 6,6. Схема подключения варика­
па к контуру не отличается от рассмотренной выше схемы для фазового
модулятора (рис. 3,в).
а)
б>
Рис. 6. Косвенный и прямой способы частотной модуляции
10.4. Д ете кто р ы
Устройство, предназначенное для выделения информации из гармониче­
ского колебания с изменяющейся амплитудой, частотой или фазой, назы­
вают детектором, т.е. детектор выполняет операцию извлечения инфор­
мации, заложенной в гармоническое колебание модулятором. В процессе
детектирования восстанавливается исходная информация, следовательно,
процесс детектирования является обратным процессом по отношению к
модуляции, и поэтому вместо терминов «детектор», «детектирование»
часто используют термины «демодулятор», «демодуляция». Различают
амплитудный, фазовый и частотный детекторы.
Амплитудные детекторы. А м п л и т у д н ы й
д е т е к т о р (АД)
предназначен для выделения модулирующей функции из АМ-сигнала.
К функции, выполняемой АД, можно подойти с трех точек зрения:
=> с математической точки зрения АД преобразует входной АМ-сигнал
( 1)
м„х (0 =
(0 cos ( о у + фс) = [Uc + A U (0 ] cos ( о у + фс)
в выходной сигнал
« « х (0 =
а :АдС/с(/)
= / : а д [ 1/ с + Д ^ (0 ] ,
где Uc, юс, фс — амплитуда сигнала при отсутствии передаваемой инфор­
мации (амплитуда несущей), частота и начальная фаза сигнала; A U(t) —
модулирующая функция, отражающая закон изменения передаваемой
информации; К Ад — коэффициент передачи детектора;
=> с временной точки зрения АД выделяет огибающую АМ-сигнала
(рис. 1,а);
=> со спектральной точки зрения АД осуществляет перенос боковых
спектральных составляющих в область низких частот (рис. 1,6).
Вход
UV- П т и х
\
Ш„
/
Шн+ О тач
О)
^н—
^min
Выход
а)
*
Ф ит
Фпич
(у)
Ю
Рис. 1. Две трактовки амплитудного детектирования
Наиболее важными п о к а з а т е л я м и АД являются:
=> коэффициент передачи, который определяется при изменении ампли­
туды сигнала по гармоническому закону Uc(t) = U Q{\ + m cos f i t ) , где
m < 1, как отношение амплитуды Ua выходного напряжения АД к ам­
плитуде огибающей входного АМ-сигнала: К л = - - -
;
mUc
=> входное сопротивление (обычно активное), представляющее собой отно­
шение амплитуды напряжения высокой частоты на входе детектора к ам­
плитуде входного тока первой гармоники: /?вх = UJIC\. Входное сопротив­
ление определяет степень шунтирования входного контура АД;
=> коэффициент фильтрации (пульсаций), определяемый отношением
кф= и асяык/и с, где Um вых — амплитуда напряжения с частотой ыс,
проникающего на выход детектора;
=> детекторная характеристика, представляющая собой зависимость
продетектированного (выпрямленного) постоянного напряжения U0
на выходе АД от амплитуды входного сигнала t/c : Uq = F(Uc). По де­
текторной характеристике можно выбрать режим работы АД, опреде­
лить его коэффициент передачи и нелинейные искажения. Для оценки
нелинейных искажений пользуются коэффициентом гармоник
=> частотная характеристика, представляющая собой зависимость ко­
эффициента передачи КАЛ АД от частоты управляющего сигнала Q
при изменении амплитуды АМ-сигнала по гармоническому закону:
К/х — Ф(£2). По частотной характеристике оценивают частотные иска­
жения АД.
Выделим четыре типа АД и рассмотрим их особенности.
Детекторы
н а н е л и н е й н ы х э л е м е н т а х . Этот тип
детекторов является традиционным и строится на полупроводниковых
диодах и транзисторах.
Несмотря на то, что диодные детекторы не находят применения в
интегральных схемах, их рассмотрение представляет большой интерес,
так как позволит выявить общие закономерности процессов, протекаю­
щих при амплитудном детектировании, и дать оценку основных парамет­
ров и характеристик устройств этого класса. Кроме того, до настоящего
времени весьма широкое применение в источниках вторичного электро­
питания находят диодные выпрямители, которые, по сути дела, выпол­
няют те же функции, что и АД. С точки зрения протекающих процессов
основное отличие АД от выпрямителей обусловлено тем, что АД должны
реагировать на изменение амплитуды входного сигнала.
Рассмотрим принципы детектирования АМ-сигнала на примере схе­
мы АД последовательного типа (рис. 2,а), в которой источник сигналов
ис, диод VD и нагрузка R с фильтром, функции которого выполняет кон­
денсатор С, включены последовательно. При объяснении принципа дей­
ствия АД можно использовать три подхода.
Допустим, что напряжение входного сигнала ис изменяется по гармо­
ническому закону и не содержит постоянной составляющей. Тогда в силу
односторонней проводимости диода через него будет протекать ток i,
среднее значение (или постоянная составляющая /о) которого не равно
нулю. Ток / 0 на резисторе R создает постоянное напряжение U0, значение
которого зависит от амплитуды напряжения сигнала ис. Конденсатор С
подавляет высокочастотные составляющие тока г. Процессы, протекаю­
щие в схеме АД при напряжении сигнала с постоянной амплитудой, при­
ведены на рис. 2,6,в. Следовательно, принцип действия АД можно рас­
сматривать с позиций работы выпрямителя. Зависимость выходного на­
пряжения {Уо от амплитуды Uc, представляющая собой детекторную ха­
рактеристику, должна быть линейной.
При временном подходе для объяснения принципа работы АД полупро­
водниковый диод наделяют функциями ключа, который находится в замкну­
том состоянии, если напряжение на диоде больше нуля, и в разомкнутом,
если к диоду подводится отрицательное напряжение. Будем полагать, что
сопротивление ключа в замкнутом состоянии и внутреннее сопротивление
источника сигналов равны нулю. В этом случае при ис = мвх > 0 происходит
заряд конденсатора С до максимального напряжения, после чего ключ раз­
мыкается и конденсатор разряжается через резистор R с постоянной времени
RC до тех пор, пока напряжение на входе не сравняется с напряжением на
конденсаторе (рис. 2,г). Выходное напряжение ивых снимается с конденсато­
ра, его форма отражает закон изменения амплитуды входного напряжения.
N
N
s
Рис. 2. Принцип амплитудного детектирования
При частотном подходе для объяснения принципа работы АД пред­
ставим АМ-сигнал в виде суммы трех составляющих:
(2)
ис = Uc( 1 + т cos Q.t) cos (cocr + фс) = Uc cos ( o v + фс) +
+ 0,5 mUc cos [(wc+ Q.)t +фс] + 0,5 mUc cos [(coc—Q)f +фс],
где m — коэффициент модуляции.
Если в преобразователе частоты для получения колебаний с разност­
ной частотой используются колебания вспомогательного автогенератора
(гетеродина), то в рассматриваемом случае нет такой необходимости, так
как эту функцию могут выполнить колебания несущей частоты. Поэтому,
подавая АМ-сигнал (2) на нелинейный элемент, в результате перемноже­
ния колебаний несущей частоты юс с колебаниями боковых частот о)с ± Q
выделяются колебания с разностной частотой Q.
При использовании транзисторов можно выделить три основных сп о­
соба амплитудного детектирования:
=> базовое детектирование. При этом способе детектирования АД стро­
ится как диодный детектор при использовании в качестве нелинейно­
го элемента перехода база — эмиттер транзистора (рис. 3 ,а). Выход­
ное напряжение выделяется на резисторе Re и усиливается транзисто­
ром VT, включенным по схеме с ОЭ;
=> коллекторное детектирование, при котором используется проходная
вольт-амперная характеристика транзистора: iK= /(и 6)). Продетектированное напряжение выделяется на резисторе RK, включенном в коллекторной
цепи транзистора VT. Конденсатор Ск служит для фильтрации высоко­
частотных составляющих. Процесс детектирования протекает в режиме
работы транзистора с углом отсечки, близким к 90°. Коллекторный спо­
соб обеспечивает детектирование сигнала с усилением;
=> эмиттерное детектирование, использующее нелинейную зависи­
мость гэ = f(iify>). Продетектированное напряжение выделяется на рези­
сторе R3, включенном в эмиттерной цепи транзистора VT, и прикла­
дывается к переходу эмиттер — база. Конденсатор Сэ служит для
фильтрации высокочастотных составляющих. Эмиттерный способ де­
тектирования не позволяет получить коэффициент передачи К Ад > 1,
однако благодаря отрицательной обратной связи по огибающей о б е с­
печивает достаточно высокое качество детектирования, большое
входное и малое выходное сопротивление.
На практике используются эмиттерный или комбинированные сп о со ­
бы амплитудного детектирования на транзисторах.
Рис. 3. Базовое (а), коллекторное ( 6) и эмиттерное (в) детектирование
Корреляционные
А Д . Схемы корреляционных детекторов
строятся на основе перемножителей аналоговых сигналов (ПАС). При ам­
плитудном детектировании на оба входа перемножителя подают АМ-сигнал
(1), в результате перемножения на его выходе получают напряжение, про­
порциональное второй степени входного напряжения:
(3)
и = K Mu l = К м [C/C( 0 c o s o y ] 2 = 0,5K MU*(t)(\ + cos 2toc/),
где Км— масштабный коэффициент ПАС; Uc(t)= Uc + AUc(t); фс = 0.
Для подавления второй гармоники, возникающей при перемножении,
на выходе перемножителя включают фильтр нижних частот (ФНЧ), а для
получения линейной зависимости между амплитудами входного напря­
жения и напряжения на выходе АД используют схему извлечения квад­
ратного корня. Рассмотренный вариант схемной реализации корреляци­
онного А Д изображен на рис. 4 ,а. На рис. 4,6 приведена схема извлечения
квадратного корня, содержащая каскады логарифмирования и антилога­
рифмирования на операционных усилителях DA\, DA2 и включенный ме­
жду ними резисторный делитель напряжения в два раза.
г
ФН Ч
- С Х
U In ku
а)
у
РА !
РА 2
«И U\n4ku
-ф >
Г1
-ф
>
■Jicu
■M J
б)
Г1
Рис. 4. Схема корреляционного амплитудного детектора (я);
способ извлечения квадратного корня (б)
К о г е р е н т н ы е А Д. При этом способе детектирования необхо­
димо располагать источником опорного напряжения, частота и началь­
ная фаза которого равна частоте и фазе АМ-колебания. Практическая
реализация таких источников стала возможной благодаря появлению
микросхем систем фазовой автоподстройки частоты. Основой для по­
строения когерентных АД служат перемножители аналоговых сигналов
(ПАС). В результате перемножения входного АМ-сигнала (1) на опорное
напряжение C/Oncos(coc/ + срс) при срс = 0 напряжение на выходе пере­
множителя изменяется по следующему закону:
(4)
мвых = ° ’5Кми ои с( 0 0 + cos 2 а у ).
Из выражения (4) следует, что:
=> на выходе детектора присутствует вторая гармоника. Для ее подавле­
ния на выходе перемножителя достаточно включить ЛС-фильтр;
=> когерентный АД является линейным детектором.
Когерентный детектор может быть выполнен по бесфильтровой
схем е, обеспечивающ ей подавление второй гармоники несущ ей час­
тоты (рис. 5). По сути дела, когерентный АД является частны м слу­
чаем преобразователя частоты, когда частота и фаза гетеродина рав­
ны частоте и фазе несущ его колебания. Минимальный входной сиг­
нал определяется собственны м и шумами, а максимальный — конеч­
ной точкой линейного участка характеристики перемножителя (для
микросхем ы К526ПС1 максимальное напряжение составляет при­
мерно 35 мВ эфф). Когерентные АД имеют линейную детекторную
характеристику, у них отсутствует порог при изменении отношения
сигнал/ш ум на входе [24].
Рис. 5. Схема когерентного детектора
АД с в ы д е л ен и ем
огибающей квадратурно­
го
с и г н а л а . На рис. 6 изображен один из возможных вариантов
схемы детектора, который содержит фазовращатель на —90°, два пере­
множителя, используемых для возведения входного сигнала во вторую
степень, сумматор и схему извлечения квадратного корня.
Рис. 6. Схема детектора с выделением огибающей квадратурного сигнала
Ф азовые детекторы . Ф а з о в ы й
детектор
(ФД) предназна­
чен для выделения модулирующей функции из ФМ-сигнала. С математи­
ческой точки зрения ФД преобразует входной ФМ-сигнал
(5)
мвх(0 = V с cos[oy + Фс + Дф(0]
в выходной сигнал
м„ых(0 = а:фд Дер(t) ,
где Uс, сос, ф с — - амплитуда, частота и начальная фаза сигнала; Дф(/) —
модулирующая функция, отражающая закон изменения передаваемой
информации; КФД— (размерный) коэффициент передачи детектора.
О с н о в н ы м и п о к а з а т е л я м и ФД являются:
=> детекторная, или дискриминационная, характеристика, представ­
ляющая собой зависимость постоянной составляющей напряжения на
выходе ФД от разности фаз немодулированного сигнала и опорного
напряжения: U0 = F((pс - ф оп);
коэффициент передачи, который определяется при изменении фазы вы­
сокочастотного колебания по гармоническому закону Д ф ( / ) = Фтcos Qt,
где Фт— индекс фазовой модуляции, Q — частота управляющего сигна­
ла как отношение амплитуды Uq выходного напряжения ФД к индексу
фазовой модуляции: Кфд = Ua/Фт. Коэффициент передачи ФД может
быть определен по наклону детекторной характеристики;
=> коэффициент фильтрации, определяемый отношением /гф = U(m вь,х/{7„ж,
где U„mвых — амплитуда высокочастотного напряжения, проникающего
на выход детектора;
=> частотные и нелинейные искажения, которые определяются при из­
менении фазы ФМ-сигнала по гармоническому закону с частотой £1.
Частотные искажения оценивают по частотной характеристике ФД,
представляющей собой следующую зависимость: КФа = xF(i2); нели­
нейные искажения — по детекторной характеристике с помощью ко­
эффициента гармоник.
Все ФД являются когерентными устройствами, требующими источ­
ника опорного напряжения с частотой, равной частоте сигнала, и строят­
ся с использованием перемножителей аналоговых сигналов (ПАС). В ре­
зультате перемножения напряжения сигнала (5) с опорным напряжением
w0n= Uon sin ( о у + ф оп) на выходе перемножителя получаем
(6 )
«вых = 0,5 KMUonUc{sin [фс - фоп + Д ф (0] - sin [2шс/ + фс +фоп + Д ф (/)]},
где Км — масштабный коэффициент перемножителя.
Вторая гармоника колебания несущей частоты подавляется фильтром
нижних частот, включенным на выходе перемножителя. Таким образом,
ФД состоит из трех основных функциональных узлов: перемножителя,
генератора опорного напряжения и фильтра нижних частот.
Первый член выражения (6) при Лф(0 = 0 (отсутствие модуляции)
представляет собой детекторную характеристику
(7)
U0 = 0,5 K MUonUc sin (фс - фоп),
которая является синусоидальной функцией.
Из (7) следует, что:
=> детекторная характеристика может быть снята экспериментально пу­
тем изменения фс или фоп;
=> фазовое детектирование сопровождается нелинейными искажениями.
Одним из условий их уменьшения является равенство начальных фаз
сигнала и опорного напряжения: фс = фоп. В этом случае в (6) при ма­
лых индексах модуляции Фт синус может быть заменен аргументом,
т.е. sin[^kp(t)] = Лф (0;
=> коэффициент передачи К фд ФД, определяемый по наклону детектор­
ной характеристики, зависит от амплитуд входного и опорного на­
пряжений.
Для линеаризации детекторной характеристики и стабилизации коэф­
фициента передачи К фд в схему ФД вводят ограничители амплитуд вход­
ного и (или) опорного сигналов.
Различие схемных решений ФД обусловлено типом используемого
перемножителя, наличием или отсутствием амплитудных ограничителей,
способом формирования опорного напряжения.
В качестве перемножителя сигнала и опорного напряжения могут
быть использованы нелинейные элементы, параметрические системы,
дифференциальные каскады (ДК), интегральные перемножители анало­
говых сигналов (ПАС), операционные усилители с управляемой обратной
связью.
При использовании инструментальных ПАС для ограничения ампли­
туд сигнала или опорного напряжения на их входах устанавливают ам­
плитудные ограничители. Микросхемы ПАС общего применения не тре­
буют установки амплитудных ограничителей, так как обеспечивают эф­
фективное ограничение амплитуд при больших амплитудах входных сиг­
налов. В микросхемах Д К ограничивается только амплитуда опорного
напряжения, для ограничения амплитуды сигнала, подаваемого на вход
генератора тока, к этому входу подключают ограничитель.
Покажем на примере схемы, приведенной на рис. 7,а, что при ограни­
ченных сигналах, поступающих на входы перемножителя, детекторная
характеристика линеаризуется и становится треугольной, исчезает зави­
симость коэффициента передачи детектора от амплитуды сигнала.
На временных диаграммах изображены (рис. 1,6):
=> входные напряжения щ, и2 прямоугольной формы, поступающие на
входы аналогового перемножителя со сдвигом фаз, равным ф;
=> токи /|, / 2, протекающие через транзисторы VT\, VT2. При их > 0 от­
крыт транзистор VT\ и через него протекает ток 1\ = /о; при и\ < 0 от­
крыт транзистор УТ2 и через него протекает ток / 2 = / 0. Здесь же пока­
зано, как распределяются токи / ь 12 при протекании через транзисто­
ры VT3+VT6. При и2 > 0 открыт транзистор УТ} и через него протекает
ток / 3 = 1Х= / 0; при и2 < 0 открыт транзистор УТ4 и через него протекает
ток / 4 = /) = / 0. Аналогично для другой пары транзисторов: при и2 < 0
открыт транзистор VTSи через него протекает ток / 5 = / 2 = / 0; при и2 > 0
открыт транзистор VTbи через него протекает ток / Л= / 2= / 0;
=> выходное напряжение ивых = RK(I3 - / 4 + / 5 - / 6), постоянная составляющая
которого, как видно из рис. 1,6, зависит от сдвига фаз ф между напряже­
ниями и2и щ и определяется следующими соотношениями:
(8)
С/вь,х = RJo(n - 2ф)/л для ф = 0.. .л ;
t/вых = Лк/о(л + 2ф)/л для ф = - л .. .0 .
т
М2>0
Ы2<0
h
Г
Л
\
Ui<
0
h
х
U 2>0
! к
.
I
т
ад
ад
ад
ад
2л
б)
Рис. 7. Схема фазового детектора (а) и временные диаграммы (б),
поясняющие принцип его работы
В справедливости (8) можно убедиться непосредственно из временной
диаграммы на рис. 1,6 для
CU
: и ^ = Uaux = RKI0 при ф = 0;
= ОгВЬ1Х= -R J 0
при ф = ±п. Соотношения (8) представляют собой
детекторную характеристику треугольной формы
^R Jo
-я/2/ /
я /2 \ ^ ф
Рис. 8. Детекторная
характеристика
(рис. 8), которая при расширении пределов изме­
нения ф является периодической функцией. Если
начальный фазовый сдвиг между входными напряжениями и2, и{ принять равным ф0 = ±Jt/2, то
детекторная характеристика будет начинаться из
нуля. Коэффициент передачи ФД определяется
тангенсом угла наклона детекторной характеристики (Кфд - ±2RJo/n) и не за­
висит от амплитуд входных напряжений щ, и2.
Ч астотны е детекторы . Ч а с т о т н ы й
д е т е к т о р (ЧД) пред­
назначен для выделения модулирующей функции из ЧМ-сигнала, т.е. ЧД
преобразует входной ЧМ-сигнал
(9)
wBX(?) = Uc cos { [шс + Д о # )] t + фс}
в выходной сигнал мВЬ1Х(?) = ^ чдД(о(?),
где Uc, сос = 2nfc, фс — амплитуда, средняя частота (обычно промежуточ­
ная) и начальная фаза ЧМ-сигнала; Доо(/) — модулирующая функция,
отражающая закон изменения передаваемой информации; К Чц = const —
(размерный) коэффициент передачи ЧД.
О с н о в н ы м и п о к а з а т е л я м и ЧД являются:
=> детекторная, или дискриминационная, характеристика, представ­
ляющая собой зависимость напряжения на выходе ЧД от частоты
входного сигнала: UBhK = Ф(шс). Детекторная характеристика может
быть получена экспериментально (рис. 9,6). Ее основными парамет­
рами являются частота со0, при которой 1/ЕЫ
Х = 0; крутизна
S = К ча =
- - х- при шс = ы0; раствор характеристики Д£2 = 0)2 - 00].
Эм..
При использовании ЧД по основному назначению, т.е. для детектиро­
вания ЧМ-сигнала, его детекторная характеристика должна быть ли­
нейной; раствор характеристики должен обеспечить заданные преде­
лы изменения частоты. Так как детекторная характеристика на часто­
те ш0 проходит через нуль, ЧД может быть использован в качестве
различителя (дискриминатора) частоты в системе автоматической
подстройки частоты. В этом случае предъявляются повышенные тре­
бования к стабильности со0 и к значению крутизны S (оно должно быть
как можно больше);
=> коэффициент передачи по напряжению, который определяется при
изменении частоты по гармоническому закону ЛоХО = Лмт cos Q/, где
Дсот — девиация частоты как отношение амплитуды Ua напряжения на
выходе ЧД к амплитуде напряжения входного сигнала: Кчди = Ua/l 7С;
=> коэффициент фильтрации, определяемый отношением к$ = UUKвых/ Uc,
где и ж ВЬ]Х— амплитуда напряжения сигнала, проникающего на выход
детектора;
=> частотные и нелинейные искажения, которые определяются при из­
менении частоты ЧМ-сигнала по гармоническому закону. Частотные
искажения оценивают по частотной характеристике ЧД, представ­
ляющей собой зависимость амплитуды Uq напряжения на выходе ЧД
от частоты модулирующего сигнала Q: U q = T (Q ). Для оценки нели­
нейных
искажений
пользуются
коэффициентом
гармоник
Выделяют д в а
т и п а ЧД. Рассмотрим их особенности.
Детекторы с преобразованием ЧМ в А М содержат преобразователь ЧМ-
сигнала в АМ-сигнал и два амплитудных детектора. Преобразователь час­
тотной модуляции в амплитудную выполняется на основе линейной цепи,
амплитудно-частотная характеристика которой имеет линейный участок.
В качестве такой линейной цепи обычно используют две резонансные сис­
темы (колебательные контуры или пьезокерамические, пьезоэлектрические и
другие типы полосовых фильтров), расстроенные симметрично относитель­
но средней частоты входного сигнала. Частотно-амплитудный преобразова­
тель имеет два выхода, которые подключаются к двум встречно включен­
ным АД. Такая структура ЧД позволяет получить детекторную характери­
стику в виде нечетной функции относительно од.
В качестве примера рассмотрим ЧД (рис. 9,а), выполненный на монолит­
ном пьезофильтре в виде гибридной интегральной схемы [23]. Входное на­
пряжение uBX(t) подводится к возбуждающим электродам 1-1 фильтра, с ко­
торыми связаны две резонансные области 2-2 и 3-3. Одна из областей на­
строена на частоту соь другая — на частоту аь. Частоты соь С0г расположены
симметрично относительно средней частоты шс = Шо входного сигнала. На­
пряжения с выходов областей фильтра подаются на два встречно включен­
ных АД. Поэтому для любой фиксированной частоты а) = const входного
сигнала напряжение на выходе АД равно
и ^ К ^ Щ -и г ),
где А^дд — коэффициент передачи АД ; (7Ь U2 — соответственно ам­
плитуды напряжений с частотой со на электродах 2 -2 и 3 -3 , опреде-
VD,
ляемые амплитудно-частотны-
-й -
ми
Jl/,
^вы?
С2
облас­
ха­
рактеристики областей 2—2 и 3-3
фильтра приведены на рис. 9,6 в
виде зависимостей
-й К02
^вх(0
характеристиками
тей фильтра.
Амплитудно-частотные
U2(со).
На
этом
U\((Q) и -
же
рисунке
приведена зависимость t/Bbк= U\~
- U2=
Ф(со),
представляющая
собой, по сути дела, детекторную
характеристику ЧД.
В детекторах с преобразо­
ванием ЧМ в Ф М используются
преобразователь ЧМ-сигнала в
ФМ-сигнал и фазовый детек­
тор. Частотно-фазовый преоб­
разователь должен иметь ли­
нейную
фазочастотную
рактеристику,
сдвинутую
ха­
на
угол +90°. Наиболее широкое
распространение
в
качестве
такого преобразователя полу­
чили LC-контуры (рис. 10).
Для цепи на рис. 10,а вы­
ражение коэффициента пере­
дачи по напряжению в ком­
в частоту
плексной
форме
имеет
сле-
дующии вид:
(Ю )
U2
АТЧФП = - Л =
Uy
.
соСЛ,
ехр /ф = ,.— "= exp j (90° -a rctg £ ),
^
где К, ф — соответственно модуль коэффициента передачи и угол сдвига
выходного напряжения; i; = 2 к(со/а)0- с о 0/со) — обобщенная расстройка;
Юо = [£К(С К+С)]~0,5 — резонансная частота; QK = со0(Ск + C)RK— доброт­
ность контура.
Для частотно-фазового преобразователя в виде последовательного
контура (рис. 10,в) выражение коэффициента передачи имеет аналогич­
ную форму:
(11)
К ФПЧ = ^ - = Ke\pj(p = — '— = = ехр / (90° - arctg £),
где ю0 = (LKCK)
контура.
Си
-0.5
резонансная частота; QK = о)0L k/R k — добротность
/?,
2С„
0— II—
С/,
&
Ск
---------- О
Ui
ЯкЙс =
С/,
М
Ui
---------- О
б)
Рис. 10. Фазосдвигающие цепи
При подаче на вход частотно-фазового преобразователя ЧМ-сигнала
(9) напряжение на его выходе с учетом (10), (11) будет изменяться по
следующему закону:
( 12)
^фчпвш ( 0 = K U C sin {arctg £ - [ ( 0 с + Дю(/)] t - Фс } .
В ФД напряжение (12) перемножается с напряжением ЧМ-сигнала (9) и по­
давляется составляющая с частотой 2(0fc. Напряжение на его выходе имеет вид
( ,3 )
и ™Л1) = 0 ,5 £ MA:t/c2 sin (arctg!;) = 0,5K UK U * .-J l —
,
V iT F
где Км— масштабный коэффициент перемножителя.
При условии со = юс == (Оо из (13) получим следующие выражения де­
текторной характеристики:
=> для ЧД с частотно-фазовым преобразователем с параллельным конту­
ром (рис. 10,а)
U MX=0,5iO0CRKK MU 2
c^
;
=> для ЧД с частотно-фазовым преобразователем с последовательным
контуром (рис. 10,г)
10.5. У с тр о й с тв а на С Н РЭ
О б особенностях и возмож ностях применения СНРЭ. Синтезирован­
ным нелинейным реактивным элементам (СНРЭ) в отличие о т известных
элементов присущи следующие основные особенности:
=> широкие пределы изменения реактивного сопротивления, поскольку в
СНРЭ с помощью управляемого ключа реактивный элемент (конден­
сатор) может быть подключен или отключен от внешней цепи;
=> два способа управления реактивным сопротивлением: со стороны си­
ловых зажимов и со стороны управляющего вывода;
возможность создания СНРЭ с нечетными характеристиками, которые
обладают тем достоинством, что при изменении управляющего на­
пряжения в спектре отклика СНРЭ отсутствуют четные гармоники.
Это облегчает условия фильтрации побочных гармоник на выходе
устройства и предъявляет менее жесткие требования к входящему в
его состав фильтру. Получение такого же эффекта обычно достигает­
ся путем введения в схемы второго НРЭ;
=> зажимы силовой цепи СНРЭ должны быть подключены к точкам схе­
мы с достаточно большим значением напряжения (тока) для создания
благоприятных условий работы полупроводниковых приборов, вхо­
дящих в состав управляемого ключа. Так как СНРЭ представляет со ­
бой подсхему, должна быть выбрана точка его подсоединения с кор­
пусом, или общей точкой устройства;
=> с точки зрения бы стродействия и частотного диапазона входны х
колебаний управляемых устройств заслуживают внимания индук­
тивные СНРЭ, в которы х коммутация ключей происходит при ма­
лых (нулевых в идеальном случае) токах. Весьма перспективно
применение управляемых ключей на М ОП-транзисторах, к д о с т о ­
инству которы х следует отнести быстродействие переключений и
симметрию вольт-амперных характеристик, позволяющ их реали­
зовать д ву хстор он н ю ю проводимость тока в откры том состоянии
ключа.
Можно выделить два класса устройств на СНРЭ.
Одночастотные
у п р а в л я е м ы е устройства, в которых
СНРЭ работает в режиме моногармонического воздействия. Они разде­
ляются на две группы. К первой группе относятся устройства, в которых
управление параметрами гармонического колебания осуществляется пу­
тем изменения внешнего постоянного (вернее медленно изменяющегося)
напряжения (тока). В нее входят устройства с управляемой амплитудой,
фазой и частотой. Вторую группу образуют устройства, в которых управ­
ление параметрами колебаний происходит за счет изменения реактивного
иммитанса СНРЭ под действием амплитуды воздействия. В нее входят
классические стабилизаторы напряжения и параметрические генераторы,
построенные по балансным схемам.
Преобразователи
ч а с т о т ы , в которых реализуется полигармонический режим работы СНРЭ.
Ниже в качестве примеров рассмотрены практические схемы уст­
ройств с управляемой частотой и амплитудой, а также делитель частоты в
два раза. Более полные и подробные сведения об аналоговых устройствах
на СНРЭ имеются в [27].
А втогенераторы с управляемой частотой. Автогенератор (рис. 1)
выполнен на полевом транзисторе КП901А по обобщенной трехточечной
схеме с емкостной обратной связью. К выводу 1 контура L, С |, С2, Сз
подключен СНРЭ последовательного типа, содержащий конденсатор (С),
диодно-транзисторный ключ (Д501А, КТ601 А ) и цепь управления ( Е у, /?3,
La ). Обмотка связи Z,CBслужит датчиком, резистор R} выполняет функции
ограничителя тока. Смещение на затворе задается с помощью делителя
напряжения, составленного из Ri, Rj. Нагрузка /?„ = 50 Ом подключена к
стоку транзистора.
10 мкГн
Рис. 1. Схема автогенератора с перестраиваемой частотой
Технические
п о к а з а т е л и управляемого автогенератора:
пределы перестройки частоты — 36...48 МГц (Еу = + 2 ,5...-2 В); выходная
мощность — 4,9...5,0 Вт. Следует отметить высокую линейность статиче­
ской модуляционной характеристики в диапазоне частот 38.. .46 МГц.
Устройство с управляемой амплитудой. Использование управляе­
мых реактивностей для амплитудной модуляции давно привлекает вни­
мание специалистов в связи с возможностью получения высоких энерге­
тических показателей при достаточно линейных модуляционных харак­
теристиках и простых схемных решениях. Однако отсутствие мощных
варикапов и высокочастотных ферритов с требуемыми характеристиками
сдерживает применение этого перспективного способа управления ам­
плитудой гармонических колебаний. Поэтому представляет интерес оце­
нить возможности и эффективность применения СНРЭ для амплитудной
модуляции. Объектом исследования выбрана параллельная двухконтур­
ная схема устройства с управляемой амплитудой, в которой СНРЭ имеет
общ ую точку соединения с источником колебаний и нагрузкой (рис. 2).
В качестве источника гармонических колебаний используется усилитель,
выполненный на транзисторе КТ920Б с нагрузкой в виде П-образного
LC-контура. Синтезированный НРЭ, собранный по параллельной схеме,
подключен к точке 1 схемы и содержит диодно-транзисторный ключ
(КД510А, КТ610Б), конденсатор С и цепь управления, составленную из
обмоток связи Z.CBс колебательными контурами и ограничительного рези­
стора R. При экспериментальных исследованиях снимались:
0,047
10...100
25...250
5,4
КТ920Б,
_rWN_
1500
4h ~
= 60
0,047
Н И
КД510А5£
КТ610Б
т
с=24%
+ 13 В
Вход управления
Рис. 2. У стройство с управляемой амплитудой
статическая модуляционная характеристика, представляющая собой
зависимость напряжения UH на нагрузке Я„ от напряжения Ет Полу­
чено: (7„ = 0 ...1 2 В при изменении Еу = + 3 ...-3 В. При этом макси­
мальное значение КПД т]тах = 60% при £/„ = 12 В;
амплитудная характеристика в виде зависимости глубины модуляции т%
от амплитуды управляющего напряжения UF на частоте F = 1000 Гц. По­
лучено: т% = 0.. .100% при изменении UF = 0.. .2 В; Г| = 3 5 .. .45%.
Делитель частоты. Делитель частоты 1,2 МГц в два раза выполнен по
параллельной схеме, приведенной на рис. 3. Силовая часть СНРЭ состоит из
конденсатора С = 240 пФ и управляемого ключа (КД510А, КТ635А). Цепь
управления построена на основе операционного усилителя К544УД2. Датчи-
ком служит конденсатор Сд — 10 ООО пФ. Резистор R= 30 Ом предназначен
для определения входной мощности делителя.
В ход
Я =30
180пф
92 мкГ н
385
о ---------- CUD—
Е =const
КТ635А
с
3,3 к
'SI КД510А
100 к
К544УД2
180
-T N 'W .
470
,=150
- 0 10 000
Рис. 3. Делитель частоты в два раза
Технические
п о к а з а т е л и : Выходная мощность делите­
ля — Лшх = 180 мВт; коэффициент передачи мощности КР = Рвых/Р вк =
= 0,75; относительная полоса деления — 24%.
11. И М П У Л Ь С Н Ы Е У С Т Р О Й С Т В А
11.1. В в е д е н и е в и м п ул ь сн ую техни ку
К импульсным
устройствам
относятся функциональные
узлы, предназначенные для создания импульсных сигналов требуемой
формы и выполнения над ними различных операций и преобразований
(интегрирования, дифференцирования, задержки во времени, изменения
формы, селекции по амплитуде, длительности и др.), а также для измере­
ния параметров электрических импульсов [47].
Импульсными
с и г н а л а м и принято называть электриче­
ские колебания, существующие в пределах конечного отрезка времени.
При этом различают видеоимпульсы uJJ) и радиоимпульсы, для которых
видеоимпульс uB(t) является огибающей, а гармоническая функция
U cos (аз? + ф) — высокочастотным заполнением. В дальнейшем основное
внимание уделено импульсным устройствам формирования и преобразо­
вания видеоимпульсов.
Появление и начальные этапы развития информационных импульсных
устройств связаны со становлением радиолокации, телеметрии и телевиде­
ния. Сфера применения импульсных устройств постоянно расширялась и
продолжает расширяться. В настоящее время многие типы импульсных уст­
ройств составляют основу элементной базы узлов и блоков компьютерных
систем, систем автоматического управления и обработки информации.
О сн овн ы е виды им пульсны х сигналов и их параметры. Э л е к ­
трические
импульсы
представляют собой процессы, проте­
кание которых сопровождается сравнительно медленными изменениями
напряжения или тока на одних временных интервалах и достаточно бы­
стрыми изменениями на других. Основным отличительным признаком
электрических импульсов является их форма, которая отождествляется с
геометрическими образами. По этому признаку можно выделить:
=> импульсы прямоугольной формы (рис. 1,а), для которых характерна
плоская вершина и самая высокая скорость нарастания и спада на­
пряжения. Для описания прямоугольного импульса используются два
параметра: амплитуда U и длительность ти. Одно из достоинств пря­
моугольных импульсов — простота формирования;
=> импульсы трапецеидальной формы (рис. 1,6), которые можно рас­
сматривать как несовершенство реализации или аппроксимацию
прямоугольных импульсов. В трапецеидальных импульсах обычно
выделяют:
•
фронт длительностью
в виде временного интервала, на ко­
тором происходит изменение напряжения от 0 до амплитудного
значения;
•
срез длительностью ?ср, в виде временного интервала, на кото­
ром происходит изменение напряжения от амплитудного значе­
ния до 0;
• вершину импульса — участок между фронтом и срезом.
Длительность импульса ти определяется на уровне 0,51/;
=> импульсы пилообразной формы (рис. 1,«), которые используются для
развертки луча в электронных трубках, для преобразования типа вре­
мя - амплитуда и других целей. Импульсы пилообразной формы ха­
рактеризуются длительностями прямого (/Пх) и обратного хода (/0х)Для оценки нелинейности используются отношение скоростей в нача­
ле и конце прямого хода импульса;
=> импульсы колоколообразной формы (рис. 1,г), обладающие наи­
меньшей шириной спектра. Они используются в технике связи и
радиолокации.
Как упоминалось, импульсные сигналы по каналам связи передаются
в виде радиоимпульсов. Для иллюстрации на рис. 1,<) приведена форма
радиоимпульса при передаче импульсов прямоугольной формы.
Рис. 1. Форма импульсных сигналов
Так как импульсные устройства всегда содерж ат накопители
энергии (в виде паразитных индуктивности и емкости), невозмож но
получить мгновенные изменения токов и напряжений. П оэтом у для
каждой формы реальных импульсов дополнительно вводятся пара­
метры, характеризующие отклонения формы реальных импульсов от
идеальных.
Например,
для
реальных
прямоугольных
импульсов
(рис. 2):
=> длительность импульса определяется на уровне 0,5 U, а длительности
фронта /ф и среза /ср— при изменении напряжения в пределах
0,Ш ...0,9С/;
=> используются такие параметры, как спад вершины ДU, выбросы
фронта UBфР и среза UBср.
Для периодической последовательности импульсов с периодом следо­
вания Т вводят понятие скважности, под которой понимают отношение
периода к длительности импульса: q = 77ти. Иногда вместо скважности
пользуются понятием коэффициента заполнения Krm = \lq.
Помимо геометрических параметров при описании импульсных про­
цессов и сигналов используют электрические показатели, например,
мощность импульса, среднюю мощность за период, постоянную состав­
ляющую напряжения (тока) и др.
Рис. 2. Параметры прямоугольного импульса
Основные типы импульсных узлов и выполняемые ими функции.
Структуру импульсных устройств можно представить в виде двухполюс­
ников (формирователи импульсных сигналов), четырехполюсников (пе­
редаточные звенья-преобразователи) и шестиполюсников (управляемые
преобразователи). Рассмотрим наиболее распространенные импульсные
узлы и выполняемые ими функции.
Импульсный
генератор
представляет собой двухполюс­
ное устройство, преобразующее постоянное напряжение Е источника
питания в импульсные колебания требуемой формы. Различают генера­
торы прямоугольных импульсов (рис. 1,а), специальной, например пило­
образной (рис. 1,в) и колоколообразной (рис. 1,г) формы.
Принцип построения генераторов прямоугольных импульсов (так же
как и гармонических колебаний) основан на использовании положитель­
ной обратной связи в усилителях с широкополосной нагрузкой. Приме­
ром таких генераторов являются:
=> мультивибратор, представляющий собой двухкаскадный резистор­
ный усилитель по схеме с общим эмиттером, выход которого соеди­
нен с входом;
=> блокинг-генератор в виде однотранзисторного каскада, в котором
положительная обратная связь обеспечивается импульсным транс­
форматором.
Для построения генераторов специальной и пилообразной формы ис­
пользуются различные способы. Например, генератор пилообразного
напряжения может быть построен на основе генератора прямоугольных
импульсов и интегратора.
Формирователь
прямоугольных
импульсов
является четырехполюсным (или шестиполюсным) устройством, позво­
ляющим получить прямоугольные импульсы с помощью дополнитель­
ных сигналов.
UikI
IV
К
t
и
!
Т„
н ---------------И
а)
к
t
М»х2
к
t
и
t
Тн
и---------------и
t
Рис. 3. Формирование импульсов с помощью моностабильного (а)
и бистабильного (б) генераторов
Одним из таких формирователей является ждущий мультивибра­
тор. На рис. Ъ,а приведены временные диаграммы, характеризующие
его работу. Особенностью ждущего мультивибратора является то, что
он имеет два устойчивых состояния равновесия. В одном из состояний
он мож ет находиться длительное время, в другом, квазистатическом
состоянии, — короткий промежуток времени. После включения ис­
точника напряжения ждущий мультивибратор оказывается в длитель­
но устойчивом состоянии равновесия, при котором устанавливается
низкий уровень выходного напряжения иВЬ1Х. После подачи на вход
запускающего импульса мзап мультивибратор переходит в квазиустойчивое состояние с более высоким уровнем U выходного напряжения, в
котором находится в течение времени ги, а затем возвращается в
прежнее состояние. Время ги определяется параметрами схемы жду­
щего мультивибратора, который относится к классу моностабилъных
генераторов.
Существует класс бистабильных генераторов, которые в отличие от
моностабилъных генераторов имеют два длительно устойчивых состоя­
ния равновесия. Одному из состояний соответствует низкий уровень вы­
ходного напряжения, другому — высокий. Поэтому для изменения со­
стояний они имеют два управляющих входа, на которые подаются сигна­
лы ивх1 и ивх2 (рис. 3,6). К классу бистабильных генераторов относятся
триггеры.
Д и ф ф е р е н ц и а т о р — это четырехполюсное устройство, вы­
ходной сигнал которого пропорционален производной от входного сигdu (?)
нала: ияыМ ) = К — —— , где К — константа, имеющая размерность вреdt
мени. На рис. 4,а показано выполнение операции дифференцирования
идеальным дифференциатором. На интервале 0.../[ входной сигнал изме­
няется по линейному закону, поэтому выходное напряжение постоянно и
пропорционально тангенсу угла наклона: мвыхи = K-U/t\. На интервале
tx.. ,/2 входное напряжение постоянно (ивх= const), поэтому напряжение на
выходе равно нулю. В момент /2 наблюдается скачок напряжения. Так как
скорость изменения напряжения равна -°о, напряжение на выходе иде­
ального дифференциатора имеет вид 5-функции.
И н т е г р а т о р — это четырехполюсное устройство, выходной
сигнал которого пропорционален интегралу от входного сигнала:
t
и(0вых - к §uM(t)d t , где к — константа, имеющая размерность, обратно
о
пропорциональную времени. На рис. 4,6 показано выполнение операции
интегрирования идеальным интегратором при подаче на вход прямо­
угольного импульса длительностью Тн. Так как на интервале 0 ...г и вход­
ное напряжение ивх = Е = const, напряжение на выходе идеального инте­
гратора изменяется по линейному закону, достигая при t = тп максималь­
ного значения кЕтн. При I > тК напряжение кЕтК на выходе интегратора
остается неизменным.
Фиксаторы
у р о в н я . В ряде случаев необходимо осущест­
вить привязку основания или вершины импульса к определенному уров-
ню. Эту операцию выполняют фиксаторы уровня. В качестве примера на
рис. 5 приведены временные диаграммы, иллюстрирующие функцию,
выполняемую фиксатором вершины прямоугольных импульсов на уров­
не заданного напряжения Е.
Дифференцирование
Интегрирование
М
Вх
М
в>
Фиксация уровня
“ах
и
KU/U
KEt„
hVt
'8-импульс
а)
б)
Рис. 4. Идеальное дифференцирование (а)
и интегрирование (б)
Рис. 5. Фиксация вершины
на уровне Е
Амплитудные
с е л е к т о р ы . В амплитудных селекторах
параметром, по которому производится отбор импульсов из совокуп ­
ности всех импульсов, поступающих на вход устройства, является ам­
плитуда. На рис. 6,а приведены временные диаграммы для селекции
импульсов, амплитуды U которых меньше заданного уровня Е вход­
ных импульсов, а на рис. 6,6 — амплитуды селекторов, позволяющих
выделить импульсы, амплитуда которых удовлетворяет следующ ему
неравенству: Е { < U < Е2.
б)
Рис. 6. Селекция импульсов, амплитуда которых меньше Е\
С е л е к т о р ы и м п у л ь с о в п о д л и т е л ь н о с т и . Такие
селекторы позволяют выделить прямоугольные импульсы, длитель­
ность которых больше (рис. 1,6) или меньше (рис. 7,в) заданного зна­
чения гизад. Принцип работы селекторов по длительности основан на
преобразовании длительности в амплитуду, которое обы чно выполня­
ется с помощ ью интеграторов. После интегрирования осуществляется
селекция импульсов по амплитуде из полученной последовательности
импульсов.
а)
-
Импульсные
м о ­
д у л я т о р ы . Если при аналоговых видах модуляции по зако­
ну
передаваемого
сообщения
изменяются параметры (амплиб)
т
1
ского
0.
«)
Рис. 7. Селекция импульсов
по длительности
~t
колебания, то
при им-
пульсных видах модуляции —
параметры или временное поло­
жение
импульсов.
Рассмотрим
основные виды импульсной м о­
дуляции, полагая, что:
=> передаваемым сообщением является низкочастотный аналоговый сиг­
нал ыНч(0 (рис. 8,а);
=> объектом модуляции является периодическая (с периодом 7) последо­
вательность импульсов прямоугольной формы.
При амплитудно-импульсной модуляции по закону передаваемого со ­
общения изменяется амплитуда импульсов (рис. 8,6):
U(tn) = Адим Инч(/л),
где АГаим — постоянный коэффициент, t„ = пТ, Т = const, п = 0, 1, 2, 3 ,...
При этом длительность импульсов ги = const.
При широтно-импульсной модуляции по закону передаваемого с о о б ­
щения изменяется длительность (ширина) импульсов (рис. 8,в):
(/„) = АГШИМ иичОп),
при этом амплитуда U = const и период Т = const, А^шим = const.
При время-импульсной модуляции по закону передаваемого сообщ е­
ния изменяется временное положение импульсов относительно исходной
последовательности (рис. 8,г):
A t{t„) = АГвим um (tn),
при этом амплитуда U = const, длительность импульсов ги = const, период
следования Т = var, А'вим = const.
•— Т ~ *
Ивим
в)
.........
у'
\
**- 7’-*)
г)
Рис. 8. Амплитудно-импульсная (б), широтно-импульсная (в)
и время-импульсная (г) модуляция низкочастотным сигналом ( а)
К лассификация импульсных устройств. Следует выделить два
класса импульсных устройств:
=> линейные устройства, которые содержат линейные элементы и описы­
ваются линейными дифференциальными уравнениями. К этому клас­
су относятся пассивные линейные цепи, состоящие из резисторов и
конденсаторов. Эти цепи заслуживают особого внимания (которое бу­
дет уделено в дальнейшем) с точки зрения понимания процессов, про­
текающих в них при импульсных воздействиях;
=> нелинейные устройства, которые содержат хотя бы один нелиней­
ный элемент (полупроводниковый диод, транзистор и др.). В нели­
нейном элементе между воздействием и откликом сущ ествует не­
линейная зависимость. Нелинейный элемент искажает форму гар­
монического колебания. В спектре его отклика появляются новые
гармоники. В импульсном режиме нелинейный элемент моделиру­
ется ключом.
С точки зрения дальнейшего изложения заслуживает внимания функ­
циональный признак классификации, согласно которому импульсные
устройства можно разделить на: 1) устройства и цепи для передачи им­
пульсов; 2) формирующие устройства и цепи; 3) генераторы импульсов;
4) схемы запуска, синхронизации и деления частоты.
11.2. П асси в н ы е л и н е й н ы е цепи при им пул ь сн о м
в о зд ей ств и и
В спомогательны е сведения. Важное место среди пассивных цепей за­
нимают ЛС-цепи. С их помощью выполняется ряд преобразований им­
пульсных сигналов, основанных на прохождении сигнала в виде ступен­
чатой функции через ЛС-цепь. Рассмотрим ЛС-цепь (рис. 1,а), находя­
щуюся под воздействием напряжения в виде ступенчатой функции. Она
описывается дифференциальным уравнением
(1)
uR + ис = Ri + ис = R C ^ ^ - + uc~u(t),
dt
при t < О,
при t > 0.
Решение дифференциального уравнения при t > О имеет вид (см. п. 4.1)
(2)
uc (t) = E( 1 - е " /т),
где т = RC.
uR(t) = u (t)-u c (t) = E - E ( l - e - ' / l ) = E e-'lz ,
Временные зависимости напряжений на элементах /?С-цепи изображены
на рис. 1,6. Напряжение udt) на конденсаторе увеличивается, а напряжение
Ug(t) на резисторе уменьшается по экспоненциальному закону. Эти зависи­
мости используются в дальнейшем для определения формы напряжения на
выходе гассматоиваемых цепей пли более сложной (Ьооме воздействия.
ис
и
Е
б)
Рис. 1. ЛС-цепь (а) и напряжения на ее элементах (б) при воздействии
в виде ступенчатой функции
Разделительные цепи. Н а з н а ч е н и е
разделительных
ц е п е й — обеспечить разделение двух соседних импульсных каскадов
по постоянному току (напряжению) и сохранение связи между ними по
переменной (импульсной) составляющей. Такая задача возникает, на­
пример, при передаче импульса с выхода усилительного каскада с высо­
ким уровнем постоянного выходного напряжения на вход следующего
каскада, в котором исходный начальный уровень постоянного напряже­
ния значительно меньше.
Требования
к разделительным
ц е п я м . Раздели­
тельная цепь должна обеспечивать:
=> большое сопротивление между выходом предыдущего и входом по­
следующего каскадов по постоянному току, что соответствует более
высокой степени развязки каскадов;
=> минимальные искажения формы передаваемого импульса.
Схемная
р е а л и з а ц и я . В качестве разделительных цепей
можно использовать:
=> импульсный трансформатор, не пропускающий постоянной состав­
ляющей. Действительно, если через его первичную обмотку протекает
постоянный ток I = const, то магнитный поток сердечника Ф = const и
с!Ф
напряжение на вторичной обмотке трансформатора и2 = к -----= 0 ;
dt
=> конденсатор, не пропускающий постоянной составляющей тока.
В конденсаторе ток и напряжение связаны следующим соотношени-
_ dur „
ем: ic = С — — . Если конденсатор включен между двумя точками с
dt
постоянным напряжением Uc = const (выходом предыдущего и вхо­
дом последующего каскадов), то ток через него не протекает ( ic = 0).
Переменная составляющая передается через импульсный трансфор­
матор и конденсатор. При соответствующем выборе параметров этих
элементов импульс, представляющий собой сумму переменных состав­
ляющих, может быть передан без искажений (точнее, с весьма малыми
искажениями). Для доказательства этого утверждения рассмотрим два
примера.
Прохождение
через
ЙС-цепь
(рис. 2,а) о д и н о ч ­
ного
прямоугольного
и м п у л ь с а . Одиночный прямо­
угольный импульс длительностью ти можно представить как сум м у
двух разнополярных ступенчатых функций с равными амплитудами,
но сдвинутыми относительно друг друга на ти, как показано на
рис. 2,6. Согласно принципу наложения (суперпозиции) для линей­
ных цепей реакция (вы ходное напряжение) на сложное воздействие
может быть определена как сумма реакций цепи на каждое элемен­
тарное воздействие. Используя полученные выше сведения (рис. 1,6)
о законе изменения напряжения на резисторе Я, построим зависимо­
сти вы ходного напряжения ивых,, мвых2 (рис. 2,6) для каждой ступен­
чатой функции. В ы ходное напряжение определяется в результате
сложения ивых = иВЬ1Х1+ ивых1 (рис. 2,в). При постоянной времени
RC —>
форма вы ходн ого напряжения будет близка к форме входн о­
го прямоугольного импульса.
Прохождение
через
ЙС-цепь
дической
последовательности
(рис. 2,а) п е р и о ­
прямоуголь­
н ы х и м п у л ь с о в (рис. 3 ,а).
В отличие от одиночного импульса такая последовательность содержит
постоянную составляющую С/0 = UxJT (рис. 3 ,а). Так как конденсатор С не
пропускает постоянное напряжение, в идеальном случае (при бесконечно
большой емкости конденсатора) напряжение на выходе рассматриваемой
цепочки будет отличаться от входного только отсутствием постоянной со ­
ставляющей, когда площадь положительной полуволны равна площади от­
рицательной полуволны: S\ = S2 (рис. 3,6). При этом напряжение на конден­
саторе оказывается равным постоянной составляющей последовательности
прямоугольных импульсов U0.
В реальных условиях, когда емкость конденсатора имеет конечную ве­
личину, в выходном импульсе появится скол вершины, который будет тем
больше, чем меньше постоянная времени т рассматриваемой ЛС-цепочки
(рис. 3,в).
Я
т
■Си
*---------------------№
и„
U
а)
Uc,
а)
Ы
|ВЬ1Х
St
T„
б)
S,= S2
б)
Мвых
Si
—
t
Рис. 2. Прохождение через
разделительную /?С-цепь
одиночного прямоугольного
импульса
J
L—1
___
в)
Рис. 3. Прохождение через разделительную
ЛС-цепь последовательности
прямоугольных импульсов
Дифференцирующие цепи. Н а з н а ч е н и е
дифференци­
рующей
ц е п и (ДЦ), или дифференциатора, — сформировать вы­
ходное напряжение, пропорциональное производной от входного:
мвых(У)= K.dum(t)/dt, где К — постоянная, имеющая размерность времени.
Принцип
реализации.
Операцию дифференцирования вы­
полняет идеальный конденсатор, ток (отклик) и напряжение (воздействие)
которого связаны известным соотношением: i=C du /dt. Поэтому если по­
следовательно с конденсатором включить резистор с весьма малым значени­
ем сопротивления (чтобы сохранить закон изменения тока) для регистрации
отклика, то получим напряжение на резисторе uR = Ri = RCduldt. Однако вве­
дение резистора не позволяет точно реализовать операцию дифференциро­
вания. Действительно, протекающий в такой цепи (рис. 4,а) ток равен
i = Cduc/dt = Cd(um - uBUX)/dt, а закон изменения выходного напряжения
(3)
2/вых
—Ri —RCd(uBX—uBm)/dt ~ RC duBJdt
при условии I мвых I «
I um |.
Условие |ивых |«
|ивх | выполняется, если сопротивление резистора
намного меньше сопротивления конденсатора, т.е. при
(4)
R«
1/(еоС) или соRC «
1.
Для этого случая согласно (3) при гармоническом входном сигнале
ивх = U sin Ш напряжение на выходе равно мвых = соR C U cos со/, и в соот­
ветствии с (4) выполняется условие |нвых |« |ивх |.
Для импульсного сигнала, имеющего широкий спектр частот, соот­
ношение (4) должно выполняться для всех частот (до a W c), вносящих
существенный вклад в энергию (мощность) импульса. Таким образом,
чем больше скорость изменения входного сигнала (шире его спектр), тем
сложнее выполнить условие
1WBblx |« I мвх I или сомаксЛС «
1.
Соотношение (4) можно переписать в виде х / Т « 0,5/л, т.е. постоян­
ная времени т = RC должна быть значительно меньше периода Т следова­
ния импульсов.
На рис. 4,д приведена временная диаграмма выходного напряжения при
воздействии на /?С-цепь (рис. 4,а) напряжения в виде ступенчатой функции
(рис. 4,в), которая позволяет судить о точности реализации операции диффе­
ренцирования по сравнению с идеальным случаем (рис. 4,г). Чем меньше
постоянная времени т = RC дифференцирующей цепи, тем выше точность.
Для импульсов с конечной длительностью фронта (среза) ошибка
дифференцирования будет меньше. Рассмотрим прохождение импульса с
конечной длительностью фронта /ф (рис. 4,е) через ЛС-цепь, представив
его в виде суммы двух линейно нарастающих напряжений (рис. 4 ,ж).
Из дифференциального уравнения
✓
*^вых | ^вых _ dum
dt
RC
dt
для входного напряжения
к
BXl
ГО д л я /< 0 ,
^Msxi
fO
\
„ или — ------- <
[kt для / > 0;
dt
[А:
Д л я/<0,
дл я ?> 0;
находим
(6)
Ur
иш ,( 0 = — ( 1 - е - ‘ И),
'ф
где t > 0; x -R C ', к - U/t$; т — постоянная времени; U — амплитуда им­
пульса; /ф — длительность фронта.
Уравнение (5) получено на основании следующих соотношений:
du„,„
dur
dum
duc
г
мвых
[0 д л я ?< ?ф,
Для входного напряжения ивх2 = <
находим (рис. А,ж)
[ « ( /- / ф ) д л я ?> ?ф
(7 )
и 1Нх2( 0
= 7 Е[ 1 - е - ('-'* ,/т].
ч
На основании (6), (7) получаем выходное напряжение
И в ы х ( 0 — WBbIxi ( / ) +
U в ы х 2 (0 >
которое приведено на рис. 4,е. Нетрудно убедиться в том, что чем силь­
ней выполняется неравенство /ф » т, тем точнее результаты дифферен­
цирования.
А
1 Ф
R
-C D Усилитель
-К и
К
1
Рис. 4. Дифференцирующие цепи
Недостаток пассивных дифференцирующих цепей — низкий уровень
выходного напряжения (амплитуда Ur/t$), обусловленный сравнительно
большим значением постоянной времени т.
Э л е к т р о н н ы й д и ф ф е р е н ц и а т о р . Для устранения ука­
занного выше недостатка используется инвертирующий усилитель с
включением ЛС-цепи по схеме, приведенной на рис. 4,6. Для оценки
свойств электронного дифференциатора составим дифференциальное
уравнение, используя следующие соотношения, справедливые для приве­
денной схемы:
i = С-
- и ) _ к - и вых _
dt
R
= -К и .
Исключив в первом уравнении и с помощью второго, получим
(В)
du„
dt
. ^вы* _ _£■ du*
сэд
dt
где
Тэд — постоянная
времени
электронного
дифференциатора:
тЭд = RC/(K + 1); К — коэффициент усиления.
Из сопоставления (8) и (5) следует, что дифференциальное уравнение
(8) описывает структуру цепи на рис. 4 ,а с большим в К раз входным на­
пряжением и меньшей в (К + 1) раз постоянной времени.
Укорачивающ ие цепи. Дифференциальная цепь (рис. 5,а) находит ши­
рокое применение в качестве укорачивающих цепей, предназначенных:
=> для сокращения актив­
ной длительности выходных
7
С)
R || "«ых
.1
а)
Рис. 5. Укорачивающая цепь
импульсов по сравнению
с длительностью входных
импульсов;
=> для постоянства (нор­
мализации) активной дли­
тельности выходных им­
пульсов в широком диапазоне длительностей входных сигналов.
Укорачивающие цепи используются для запуска импульсных уст­
ройств (триггеров, ждущих мультивибраторов и др.)
При воздействии на /?С-цепь прямоугольных импульсов длитель­
ность выходных импульсов не превышает Зх (рис. 5,6), где х
п о сто ­
янная времени. П оэтому, если длительность входных импульсов
т и > Зх, то длительность выходных импульсов остается постоянной
(нормализуется) при изменении длительности входных импульсов в
широких пределах.
Влияние
выходного
сопротивления
Rи
и с ­
точника
импульсов
на ф о р м у
выходных
и м ­
п у л ь с о в . Как следует из рис. 6, внутреннее сопротивление источника
импульсов:
zz> увеличивает длительность выходного импульса (рис. 6,в) в связи с
увеличением постоянной времени х = (R + R„)C. Пунктиром на рис. 6,в
показана зависимость выходного напряжения при /?и = 0;
=> уменьшает амплитуду выходного импульса (рис. 6,в), так как выход­
ное напряжение снимается с резисторного делителя напряжения R„, R
(рис. 6,6).
Влияние
паразитной
емкости
Сп нагрузки
на ф о р м у
выходных
и м п у л ь с о в (рис. 7). Как следует
из схемы на рис. 1,6, полученной на основании теоремы об эквивалент­
ном генераторе, паразитная емкость:
увеличивает результирующую емкость ЛС-цепи, складываясь с ос­
новной емкостью С. Поэтому увеличивается постоянная времени
х = (С + C„)R и, следовательно, длительность выходного импульса;
уменьшает амплитуду воздействия (напряжения эквивалентного генера\
СМВХ
тора): и = —+(-, и, следовательно, амплитуду выходного импульса.
CD
Л
Мв»
б)
Рис. 6. Влияние внутреннего сопротивления источника на форму выходного им­
пульса укорачивающей цепи
с+с„
а)
6)
Рис. 7. Влияние емкости нагрузки на форму выходного импульса
укорачивающей цепи
Интегрирующие цепи. И н т е г р и р у ю щ а я ц е п ь (или инте­
гратор) предназначена для формирования выходного напряжения, пропор/
ционального интегралу от входного: мВЬ1Х(/) = К \um(1)d t, где К — постоО
янная, имеющая размерность, обратно пропорциональную времени [с-1].
П р и н ц и п р е а л и з а ц и и . Операцию интегрирования выпол­
няет идеальный конденсатор, напряжение (отклик) и ток (воздействие)
J f
которого связаны известным соотношением: u(t) = — ji( t) d t. Для реали^ о
зации этой операции необходимо располагать источником тока, в качест­
ве которого обычно используют источник напряжения с большим внут­
ренним сопротивлением. Поэтому интегрирующая цепь имеет структуру,
изображенную на рис. 8 ,а. Выходное напряжение равно напряжению на
конденсаторе:
1 I
j '
j >
«вы, ( 0 = ^ J*(/) d t = - ^ К х - И »
К d t.
Приведенное выражение свидетельствует о том, что операция интегриро­
вания реализуется с ошибкой, для уменьшения которой необходимо выпол­
нить условие |иах |» |мвых |. Для гармонического входного сигнала это усло­
вие равносильно неравенству R » 1/(соС), которое для импульсных сигналов
можно записать в виде со„инСЛ » 1, где со„Ин — минимальная частота спек­
тра импульсного сигнала.
Определим реакцию RC-цепи на одиночный прямоугольный импульс
(рис. 8 ,в), представив его в виде суммы двух ступенчатых функций со
сдвигом ти, равным длительности импульса (рис 8 ,г). Для этого восполь­
зуем ся дифференциальным уравнением (1) для ЛС-цепи при воздействии
ступенчатой функции и его решением ( 2 ), которые для рассматриваемой
схемы имеет вид
гд е т = RC — постоянная времени; Е — амплитуда входного импульса.
На рис. 8 ,в изображена форма выходного импульса, позволяющая
судить об ошибках реализации операции интегрирования. Форма вы ­
ходного напряжения при идеальном интегрировании показана на
рис. 8 ,в пунктиром.
Электронный
и н т е г р а т о р . Для оценки свойств элек­
тронного интегратора составим дифференциальное уравнение, используя
следую щ ие соотношения, справедливые для приведенной на рис. 1,6
схемы:
i =
R
П одставляя из второго соотношения и = -и вы%/К в первое, получаем
уравнение
где
тЭи —
постоянная
времени
электронного
интегратора;
Тэи = (К + 1)RC, К — коэффициент усиления.
Из сопоставления (10) и (9) следует, что дифференциальное уравнение
( 1 0 ) описывает структуру цепи на рис. 8 ,а с большими в К раз входным
напряжением и в (К + 1) раз постоянной времени.
11.3. Импульсные устройства
на полупроводниковых диодах
Одним из основных элементов большинства импульсных устройств явля­
ется электронный ключ, выполняющий функции коммутации цепей под
действием сигналов. Поэтому рассмотрим возможности использования
полупроводниковых диодов в ключевых режимах.
Д и о дн ы е клю чи. Применение диодов в клю чевых схем ах обуслов­
лено их способностью проводить ток только в одном направлении. На
рис. 1,а изображена вольтамперная характеристика (В А Х ), форма кото­
рой свидетельствует о том, что при и > 0 сопротивление диода мало, а
при и < О — велико. При аппроксимации ВАХ используют различные
подходы:
=> для идеальной модели диода полагают, что при и > О диод способен
пропускать ток любой величины (г —» °°), при и < О ток г = 0 , т.е. диод
является идеальным ключом, находящимся в замкнутом состоянии
при и > 0 и в разомкнутом состоянии при и < О(рис. 1 ,6 );
=> при кусочно-линейной аппроксимации характеристики отрезками,
проходящими через начало координат, идеальная модель в виде клю­
ча дополняется резисторами: Rnp —» 0 при прямых напряжениях (и > 0)
и Я0бр —» °° при обратных напряжениях (м < 0 ), включенных, как пока­
зано на рис. 1 ,в;
=> при кусочно-линейной аппроксимации характеристики отрезками, не
проходящими через начало координат, модель диода представляется в
виде источников напряжения (Етс — напряжение отсечки) и тока
(/, — ток насыщения) с соответствующими внутренними сопротивле­
ниями (рис. 1 ,г).
Для пояснения принципов работы рассматриваемых устройств будем
пользоваться моделью идеального полупроводникового диода (рис. 1 , 6 ).
1
1
1
1
Й
/
\
j
и
i
г
а)
б)
/ -Ф
^ ^"р
и
R"<’
______ у
и
Ловр
в)
г)
Рис. 1. Диод как ключ и его вольт-амперные характеристики
Амплитудные ограничители. Н а з н а ч е н и е . К этому классу от­
носятся устройства, предназначенные в общем случае для ограничения
мгновенного значения выходного сигнала заданными уровнями. С уть опера­
ции амплитудного ограничения состоит в том, чтобы при входном напряже­
нии мвх(?), мгновенное значение которого изменяется в пределах
^Лхмин-'-^вхмако мгновенные значения выходного напряжения не выходили
за пределы диапазона, ограниченного значениями Е\ и Е2. Такую операцию
выполняют двусторонние амплитудные ограничители. При одном заданном
уровне Е\ или Е2 выполняется операция одностороннего ограничения, реали­
зуемая ограничителями с верхним и нижним уровнями.
Рассмотрим простейшие схемы диодных ограничителей и их работу
при гармоническом входном сигнале.
Последовательный
о г р а н и ч и т е л ь . В схеме такого
ограничителя источник сигналов, полупроводниковый диод VD и нагруз­
ка R образуют последовательную цепь (рис. 2,а).
При « вх < +Е диод VD заперт, поэтому выходное напряжение ивх = +Е\
при ивх > +Е диод VD открыт и выходное напряжение ивх = мвых (рис. 2,6).
Следовательно, реализуется ограничение снизу.
Если изменить полярность включения диода VD, то при мвх < +Е диод
VD открыт, поэтому выходное напряжение мвх = « ВЬ|Х; при мвх > +Е диод
VD заперт и выходное напряжение ивх = +Е (рис. 2,в). В этом случае реа­
лизуется ограничение сверху.
Рис. 2. Последовательный амплитудный ограничитель (а)
и временные диаграммы выходного напряжения (б, в)
П а р а л л е л ь н ы й о г р а н и ч и т е л ь . В схеме такого ограни­
чителя источник сигналов (реализован в виде источника напряжения ивх с
внутренним сопротивлением /?„), полупроводниковый диод VD и нагруз­
к а R соединены параллельно (рис. 3,а).
При ивх > +Е диод VD открыт и выходное напряжение иВЬ1Х= +Е (огра­
ничено); при мвх < +Е диод VD заперт, поэтому выходное напряжение
мВых= RubJ(R k+R) (рис. 3,6). Следовательно, реализуется ограничение
сверху.
Рис. 3. Параллельный амплитудный
ограничитель (а) и временные диаграммы
входного и выходного напряжения (б)
Рис. 4. Схема двустороннего
амплитудного ограничителя
Д в у с т о р о н н и й о г р а н и ч и т е л ь , схема которого изобра­
жена на рис. 4, реализует операцию двустороннего ограничения с верх­
ним уровнем +Е\ и нижним уровнем -Е 2.
Ф и ксато р ы ур о вн я. Н а з н а ч е н и е . К этому классу относятся
устройства, предназначенные для фиксации (и изменения) среднего
уровня выходной импульсной последовательности по отношению к
входной последовательности. Фиксаторы уровня можно разделить на
несколько групп:
=> фиксаторы уровня основания и уровня вершины. Например, фиксато­
ры уровня основания фиксируют на требуемом уровне основания
входных импульсов. В частности, фиксаторы нулевого уровня позво­
ляют восстановить постоянную составляющую;
=> фиксаторы начального уровня, осуществляющие фиксацию основания
или вершины импульсов на заданном уровне;
=> фиксаторы уровня положительных и отрицательных импульсов, от­
личающихся полярностью импульсов, подлежащих фиксации.
Фиксатор
вершины
импульсов
на н у л е в о м
у р о в н е . Помимо источника входных импульсных сигналов ивх с внут­
ренним сопротивлением R„ ~ 0 фиксатор (рис. 5,а) содержит конденсатор
С, полупроводниковый диод VD и нагрузочный резистор R.
На интервале 0 ...^ (рис. 5,6) во время действия импульса входного
напряжения ивх = U диод VD открыт и напряжение на выходе фиксатора
Ивых = 0. Конденсатор С заряжен (рис. 5,в), напряжение на конденсаторе
ис = U (полярность напряжения показана на рис. 5,а).
На интервале t]...t2 входное напряжение мвх = 0. В первый момент
времени напряжение на конденсаторе остается неизменным, потенциал
его левой обкладки равен нулю, поэтому ивых = ивх - и с = - U (мЛи ~ 0 )» и
диод закры вается. Конденсатор начинает медленно разряж аться по
цепи - С —>R„ —> wBX—> R
+С с постоянной времени, равной
(R + ДН)С, что вы зы вает уменьш ение напряжения на вы ходе ивых ~ - и с
(рис. 5,г).
На интервале t2...h входное напряжение ивх = U. В первый момент
времени напряжение на вы ходе скачком изменяется до величины
Ивых^г) - U - ucit2) > 0 (рис. 5,г), диод откры вается, и конденсатор бы­
стро заряж ается (с постоянной времени RKC) до напряжения ис = U
(рис. 5,в). Напряжение на вы ходе мвых = ивх - ис = 0. Д алее процессы
повторяю тся.
Фиксатор
начального
у р о в н я . В схему фиксатора
(рис. 6,а) дополнительно введен источник постоянного напряжения Е.
На интервале 0 ...?i при ивх = 0 (рис. 6 , 6 ) полупроводниковый диод от­
крыт. Напряжение на выходе фиксатора ивых = Е, конденсатор заряжен до
напряжения ис = —Е (рис. 6 ,в).
На интервале
с появлением входного напряжения ивх = U диод
VD закрывается. Под действием положительного напряжения происходит
перезаряд конденсатора С по цепи ивх —» R„ —> С —» R - » Е с постоянной
времени (R + R„)C (рис. 6,в). Напряжение на выходе фиксатора ивых = ивх - ис (мДи= 0 ) медленно убывает (рис. 6 ,г).
Л»
— с=>
V D l l R\ \ ««
ф
ис
i
а)
а)
“вх
и
О t\
ф
£/ —-
h
б)
0
h
h
Л
h
U I
б)
ис
U
-£
в)
^вых
£+(/
~—
и
-и
Рис. 5. Фиксатор вершины импульсов
и принцип его работы
Y
Рис. 6 . Фиксатор начального уровня
и принцип его работы
На интервале
входное напряжение ивх = 0. Диод VD открывает­
ся, и в первый момент происходит быстрый заряд конденсатора от источ­
ника напряжения Е с постоянной времени RKC до напряжения ис = —Е
(рис. 6,в). Напряжение на выходе нВЬ|Х= 0 - и с = Е. Далее процессы повто­
ряются.
Как следует из временных диаграмм (рис. 6 ,г), выходные импульсы
повторяют форму входных, но со сдвигом по уровню на Е.
11.4. Импульсные устройства на транзисторах
Транзисторны е клю чи. В отличие от диода транзистор является трехпо­
люсным элементом, содержащим входную и выходную цепи. Поэтому в
импульсной технике транзисторы используются как управляемые ключи.
Особенности таких ключей рассмотрим на примере биполярного транзи­
стора, воспользовавшись схемой на рис. 1,а. В транзисторе непосредст­
венно функции ключа выполняет промежуток коллектор-эмиттер, про­
межуток база—эмиттер управляет его состоянием. О состоянии транзи­
стора можно судить по коллекторному току iK, значение которого опреде­
ляется следующими соотношениями:
/к (Ек wK)/i?K, /к Е(ик, /б)*
Рис. 1. Транзисторный ключ (а) и его свойства (б, в, г)
Первое соотношение отражает закон Ома для коллекторной цепи
(рис. 1 ,а) и называется нагрузочной прямой, второе — семейство вольтамперных характеристик (ВА Х ) транзистора (рис. 1,6). Воспользуемся
графическим методом решения системы уравнений (см. п. 9.6), для чего
нанесем нагрузочную прямую на семейство характеристик по точкам
/к = /к = EK/RK при ик = 0 и ик = Ек при гк = 0 (рис. 1,6). Коллекторный ток
задается базовым током и определяется точкой пересечения характери­
стик для /й= const с нагрузочной прямой. На семействе В А Х для им­
пульсного режима представляют интерес две точки:
=> точка 1 , для которой коллекторный ток имеет весьма малое значение.
Этой точке соответствует режим отсечки, или закрытое состояние
транзистора (рис. \,в)\
=> точка 2 , для которой коллекторный ток имеет максимальное значе­
ние. Этой точке соответствует режим насыщения, или открытое со­
стояние транзистора. В режиме насыщения ток коллектора перестает
управляться током базы i5, и можно считать, что между всеми вы во­
дами транзистора имеется короткое замыкание, т.е. транзистор как бы
стягивается в точку (рис. 1,г).
Рассмотрим некоторые импульсные устройства с транзисторными
ключами, используя для простоты изложения работы импульсных схем
модели транзистора, представленные на рис. \,в,г.
О дновибраторы. О б щ и е
с в е д е н и я . Одновибратор, или
ждущий мультивибратор, относится к классу моностабильных импульс­
ных устройств с одним длительно устойчивым и одним кратковременно
устойчивым состоянием, которое называется квазисостоянием. Одновиб­
ратор имеет один вход, предназначенный для запускающего импульса, и
один выход для снятия выходного напряжения. После подачи питания од­
новибратор переходит в устойчивое состояние равновесия, в котором с его
выхода снимается постоянное напряжение. В таком состоянии одновибра­
тор будет находиться до поступления на его вход запускающего импульса.
С его появлением одновибратор пере­
ходит во временно устойчивое состоя­
ние с другим уровнем выходного на­
пряжения. В этом состоянии одновиб­
ратор находится конечное время, опре­
деляемое параметрами схемы, после
чего автоматически возвращается в
исходное устойчивое состояние равно­
весия. По сути дела, одновибратор
Рис. 2. Схема одновибратора
представляет собой формирователь
с двумя источниками напряжения
одиночного прямоугольного импульса
под действием запускающего импульса.
Одновибраторы применяют для стандартизации импульсов по дли­
тельности, для задержки, деления частоты повторения импульсов, управ­
ления работой электромагнитных реле.
С х е м а и п р и н ц и п р а б о т ы . Для выявления особенностей
работы воспользуемся схемой одновибратора с двум я источниками на­
пряжения, изображенной на рис. 2 .
Исходное состояние одновибратора (рис. 3,а,в). Транзистор УТ2 от­
крыт и насыщен базовым током, протекающим через резистор Rq2. На­
пряжение на его базе и коллекторе щ2 ~ иа ~ 0- Транзистор VT\ заперт
отрицательным напряжением w6 i= -£ / 6 i. Это напряжение снимается с
делителя напряжения Ru R51 , включенного между коллектором открыто­
го транзистора VT2 и источником напряжения ~Е6. Конденсатор С заря­
жен током, протекающим по цепи: +ЕК—» Лк) —» С —» база — эмиттер VT2,
до напряжения +ЕК, поэтому напряжение на коллекторе транзистора VT\
равно ик! = +ЕК.
Квазисостояние (рис. 3,6,в). Запускающий импульс ы.И1, в момент вре­
мени t\ открывает транзистор VTX. Напряжение на левой обкладке конден­
сатора становится равным нулю (ик1 = 0), а на правой------Ек. Следователь­
но, к базе VT2 прикладывается напряжение м62 = - Ек и транзистор VT2 за­
крывается. Напряжение на его коллекторе uia= U^< <ЕКопределяется
делителем напряжения, составленным из резисторов R&, R\. Открытое со­
стояние транзистора VT\ поддерживается базовым током, протекающим
через резисторы R*2, R\.
Рис. 3. Принцип работы одновибратора
При t > t\ происходит процесс перезарядки конденсатора С по цепи
+£к —> R62 —>С —>коллектор — эмиттер VT\ под воздействием напряже­
ния, равного 2ЕК, с постоянной времени R62C (рис. 3,в). В момент времени
t2, когда напряжение на базе и62 (на правой обкладке С) превысит нуль,
открывается транзистор VT2. Напряжение на его коллекторе становится
равным нулю, благодаря чему запирается транзистор VT\ и после заряда
конденсатора по цепи +£к —» RKl —>С —>база — эмиттер VT2 одновибратор возвращается в исходное состояние.
Д р уги е схем ны е решения одновибраторов. На рис. 4 ,а изображена
схема одновибратора с эмиттерной связью, содержащего один источник
питания. В этой схеме в исходном (длительно устойчивом) состоянии
транзистор VT2 открыт и насыщен, транзистор VT, закрыт. Открытое со­
стояние VT2 поддерживается базовым током, протекающим через рези­
стор /?б2, а закрытое состояние транзистора VTt — резисторами R\, R2 и
R, . Их сопротивления выбираются такими, чтобы напряжение база-эмит­
тер транзистора VT, было меньше нуля. Напряжение на конденсаторе С
несколько меньше и равно
UC = EK- U ,= EK{ \ - [Я, AR. 2 + Л ,)]}.
После подачи запускающего импульса на базу транзистора FT, одновибратор переходит во временно устойчивое состояние, когда открыт и
насыщен транзистор VT\ , а транзистор VT2 закрыт. В этом состоянии
происходит перезаряд конденсатора С. После того как Uc станет равным
нулю, транзистор УТ2 открывается и одновибратор возвращается в устой­
чивое исходное состояние.
Н едостаток рассмотренных схемных решений состоит в том, что изза большой постоянной времени RKlC затягивается процесс восстановле­
ния исходного состояния (рис. 3,в).
Рис. 4. Схемы одновибраторов с эмиттерной связью (а)
и дополнительным эмиттерным повторителем (б)
Приведенная на рис. 4,6 схема одновибратора лишена указанного недос­
татка благодаря введению эмиттерного повторителя на транзисторе VT}.
В этой схеме после перехода транзистора КГ3 в открытое состояние кон­
денсатор С заряжается через открытый транзистор VT3 (вместо ЛК]),
имеющий значительно меньшее сопротивление, чем RK\. Благодаря при­
нятой мере не только уменьш ается длительность среза формируемого
импульса, но и появляется возможность повышения частоты запускаю­
щих импульсов. Полупроводниковый диод VD предназначен для созда­
ния цепи перезаряда конденсатора в квазистатическом состоянии:
+ЕК R62 —>С —» VD —>коллектор-эмиттер VTX.
М ульти ви б р ато р. Н а з н а ч е н и е и с х е м н ы е о с о б е н ­
н о с т и . Мультивибратором называют релаксационный автогенератор,
предназначенный для генерирования прямоугольных импульсов с задан­
ной длительностью и частотой повторения в тех случаях, когда не предъ­
является жестких требований к стабильности указанных параметров. Про­
стейшая схема мультивибратора изображена на рис. 5,а и представляет
собой два замкнутых в кольцо инвертора. Такое же схемное решение ис­
пользуется в триггерах. Однако в отличие от триггеров инверторы мульти­
вибратора разделены по постоянному току с помощью конденсаторов и
установлены в усилительный режим. Таким образом, в мультивибраторах
используется общий принцип генерирования колебаний: положительная
обратная связь и усиление, что обеспечивается инверторами. В отличие от
LC-генераторов гармонических колебаний в мультивибраторах использу­
ется широкополосная нагрузка в виде резисторов RKi, R,a. Поэтому генери­
руемые колебания имеют прямоугольную форму.
П р и н ц и п р а б о т ы . Рассмотрим работу симметричного мульти­
вибратора (рис. 5,а), схемные параметры которого удовлетворяют следую­
щим равенствам: /?к| = Rk2 = RK, Rq\= Л62 = Re, С\ = С2 = С. Полагаем, что
мультивибратор находится в состоянии 1 (рис. 5,б,г), в котором транзистор
VTSоткрыт (иК1 = м6, = 0), а транзистор VT2 — закрыт. В этом состоянии:
=> происходит заряд конденсатора С, по цепи: +Е —>Rk2 —> С\ —» база —
эмиттер VT[ с постоянной времени Rk2C\. Поэтому на коллекторе
транзистора VT2 устанавливается напряжение ик2 = Е;
=> осущ ествляется перезаряд конденсатора С2 (предварительно заряжен­
ного) по цепи: +Е —» R62 —> С2 —» коллектор — эмиттер VT\ с постоян­
ной времени R(,2C2. После того как напряжение на правой обкладке
конденсатора С2 или на базе VT2 превысит нуль (и62 = 0), открывается
транзистор VT2 и мультивибратор переходит в состояние 2.
В состоянии 2 (рис. 5,в,г):
=> сразу же после открывания VT2 происходит запирание транзистора VT\
отрицательным напряжением щ\ = —Е, снимаемым с левой обкладки
конденсатора С2;
=> происходит заряд конденсатора С2 по цепи: +Е —» Лк| —» С 2 —» база —
эмиттер РТ, с постоянной времени /?KiC2. Поэтому на коллекторе
транзистора VT\ устанавливается напряжение ик\= Е;
=> осуществляется перезаряд конденсатора С, (предварительно заряжен­
ного) по цепи: +Е —» /?б2 —» С\ —» коллектор — эмиттер РТ2 с постоян­
ной времени ReiC\. После того как напряжение на правой обкладке
конденсатора С\ или на базе VT{ превысит нуль (мй| = 0), открывается
транзистор VTi и мультивибратор переходит в состояние 3.
Далее процессы повторяются.
Рис. 5. Мультивибратор и принцип его работы
Мультивибраторы имеют невысокую стабильность длительности перио­
да Т колебаний, так как на величину Т существенное влияние оказывают
обратный ток коллекторного перехода и напряжение запирания транзистора,
которые в значительной мере зависят от температуры окружающей среды.
Поэтому для получения последовательности прямоугольных импульсов
обычно используется режим синхронизации мультивибраторов.
Генераторы линейно изменяющегося напряжения. О б щ и е с в е ­
д е н и я . Такие генераторы предназначены для формирования линейно
нарастающего и линейно спадающего напряжения (рис. 6 ).
Основными параметрами линейно изменяющегося напряжения явл я­
ются: период повторения Т\ длительности рабочего хода ГРХ, обратного
хода Тох и ожидания Тож\ амплитуда U, линейность рабочего хода, для
оценки которой используют коэффициент нелинейности:
(о
к..
\d u ld tL
0 - \ d u ld tL
Tn
\d u l d t \,=0
Рис. 6 . Линейно нарастающее и линейно спадающее напряжения
Принцип
получения
линейно
изменяюще­
гося
н а п р я ж е н и я основан на заряде (разряде) конденсатора.
duc ic
Так как скорость изменения напряжения на конденсаторе —~ =
то
at
С
для получения линейного напряжения необходимо заряжать конденсатор
постоянным током ic = const. Поэтому схемы генераторов линейно изме­
няющегося напряжения (ГЛИН) строятся с использованием ключей для
подсоединения конденсаторов к цепям заряда (разряда) и токостабилизи­
рующих устройств. На рис. 7 приведены структурные схемы ГЛИН для
формирования линейно нарастающих и спадающих напряжений.
Рис. 7. Структурные схемы формирователей линейно нарастающих
и спадающих напряжений
Рассмотрим некоторые варианты принципиальных схем ГЛИН, отличаю­
щиеся способами стабилизации зарядного (разрядного) тока конденсатора.
Г е н е р а т о р н а о с н о в е Л С - ц е п и. Схема такого генера­
тора с линейно нарастающим напряжением, приведенная на рис. 8 ,а , со­
держит зарядную ЛС-цепь, транзистор VT с резистором R6 в базовой цепи
и разделительный конденсатор Ср, связывающий генератор с источником
импульсов uBX(t).
В исходном состоянии (ивх = 0) транзистор VT открыт и насыщен то­
ком базы, который задается выбором соответствующего значения R6. На­
пряжение на его коллекторе, а следовательно, на конденсаторе С и на
выходе генератора близко к нулю (рис. 8 ,в). При подаче на базу транзи­
стора отрицательного импульса длительностью ти транзистор закрывает­
ся и конденсатор начинает заряжаться от источника питания +Е через
резистор RK, (рис. 8,6). Напряжение на конденсаторе и на выходе схемы
изменяется по экспоненциальному закону, стремясь к +Е (рис. 8 ,в). По
окончании действия входного импульса транзистор VT открывается и
конденсатор быстро разряжается.
Рис. 8. Принципиальная схема генератора линейно нарастающего напряжения
и принцип его работы
Н едостаток схемного решения — низкий коэффициент использова­
ния напряжения питания U/Е, так как для получения малых искажений
задействован начальный участок экспоненты.
Генератор
с токостабилизирующим
тран­
з и с т о р о м . Генератор позволяет сформировать линейно спадающее
напряжение. Схема генератора приведена на рис. 9. Ее отличие от рас­
смотренной выше схемы состоит в том, что:
конденсатор С включен последовательно с транзистором VTU выпол­
няющим функции управляемого ключа;
=> дополнительно введен каскад с общей базой на транзисторе VT2, предна­
значенный для стабилизации разрядного тока конденсатора. Известно,
что каскад с общей базой обладает высоким выходным сопротивлением,
а поэтому является источником тока (42 = const), направление протекания
которого соответствует току разряда конденсатора С. Как видно из
рис. 9,в, при фиксированном токе базы г'б2 = const коллекторный ток тран­
зистора VT2 изменяется в незначительных пределах.
При отсутствии входного импульса (ивх = 0) конденсатор С быстро за­
ряжается через открытый транзистор VT\ с постоянной времени RKC до
напряжения +Е (рис. 9,6).
С поступлением входного импульса мвх отрицательной полярности
транзистор УТ\ запирается. Начинается разряд конденсатора С постоян­
ным коллекторным током гк2 через транзистор УТ2 каскада с общей базой
в течение действия импульса tK(рис. 9,6).
После окончания импульса открывается транзистор VT\, и процессы
повторяются.
+Е
а)
б)
Рис. 9. Генератор линейно спадающего напряжения и принцип его работы
Генератор
с компенсирующим
напряжение м. Такой генератор обеспечивает наименьшее значение показателя не­
линейности (1). Для пояснения принципа действия компенсирующего
напряжения воспользуемся схемой на рис. 10,я. Протекающий по цепи
зарядный ток равен
■(f) E + uK( t ) - u c (t)
Если ик([) = udt), то i(t) = Е/R, т.е. конденсатор С заряжается постоян­
ным током, поэтому скорость заряда конденсатора постоянна и напряже­
ние изменяется по линейному закону.
С хема генератора, реализующая принцип компенсации, изображена
на рис. 10,6. В ее состав входят:
=> каскад на транзисторе VT\, представляющий собой по сути дела рас­
смотренный выше ГЛИН на основе /?С-цепи (рис. 1,а). Отличие со-
стоит лишь в том, что в коллекторную цепь дополнительно включен
диод VD, функции которого будут пояснены ниже;
=> эмиттерный повторитель на транзисторе VT2, выполняющий функции
источника компенсирующего напряжения. Вход эмиттерного повто­
рителя подключен к выходу первого каскада; выход является выходом
генератора;
=> конденсатор С0 » С, выполняющий функции источника постоянного
напряжения Е (рис. 10,а). Конденсатор С0 включен м еж ду общей точ­
кой VD и RK.
В исходном состоянии транзистор VT\ открыт и насыщен. Напряжение на
конденсаторе С практически равно нулю, поэтому транзистор VT2 закрыт и
напряжение на выходе генератора нвых = 0. Конденсатор С 0 заряжен до на­
пряжения VT\ по цепи: +Е —» VD —>С(>—>
общая точка схемы.
С поступлением входного импульса отрицательной полярности тран­
зистор VT\ закрывается, и конденсатор С начинает заряжаться от источ­
ника питания +Е через диод VD и резистор RK. Возрастающее напряжение
Uc на конденсаторе С передается через эмиттерный повторитель и кон­
денсатор С0 (не успевающий заряжаться из-за большого значения емкости)
на катод VD, и диод запирается. Образуется автономная цепь заряда кон­
денсатора С: +С0 —>RK—» С —» эмиттерный повторитель на VT2 —> - С0,
эквивалентная по функциям цепи на рис. 10,а. По этой цепи происходит
дальнейший заряд до окончания входного импульса, после чего схема
вернется в исходное состояние.
+Е
-О
VD 3 7
Со
6)
Рис. 10. Генератор линейно нарастающего напряжения
с компенсирующим напряжением
11.5. Селекторы импульсов
Общие сведен и я. С е л е к т о р а м и
импульсов
(Select —
выбирать) называют устройства, предназначенные для выделения
импульсов с требуемыми параметрами из совокупности импульсов,
поступающих на вход устройства. В качестве отличительных признаков
используются такие параметры импульсов, как амплитуда, длительность,
частота повторения. В соответствии с этим различают селекторы по
амплитуде, длительности, периоду или частоте повторения. Рассмотрим
первые два типа селекторов.
А м п л и туд н ы е сел екто р ы . В амплитудных селекторах для селекции
используется амплитуда импульсов, поступающих на вход устройства.
Рассмотрим некоторые типы амплитудных селекторов и их схемную
Селекторы
по з а д а н ­
ному
уровню
Е. К простей­
шим случаям амплитудной селекции
относится выборка импульсов, ампли­
туда которых больше или меньше
заданного уровня.
_ П _____ г г
В этих случаях для селекции мож­
но использовать рассмотренные в па­
раграфе 11.3 амплитудные ограничи­
тели. Такая возможность проиллюст­
рирована на рис. 1. Для селекции им­
пульсов с амплитудой, превышающей
Рис. 1. Селекция амплитуды
заданный уровень Е, можно использо­
по заданному уровню
вать амплитудный ограничитель «сни­
зу», построенный по схеме на рис. 2,а (параграф 11.3). Для этих же целей
можно использовать другие схемные решения. В качестве примера на
рис. 2 приведена схема устройства для селекции импульсов, амплитуда
которых меньше Е. Устройство содержит:
=^> селектор С импульсов, амплитуда которых превышает заданное зна­
чение Е\
=> инвертирующий расширитель Р импульсов, в качестве которого мож­
но использовать одновибратор;
элемент D задержки импульсов,
=> схем у совпадения (логический элемент И).
Работа схемы проиллюстрирована временными диаграммами, приве­
денными на рис. 2,6. С выхода селектора С амплитуд снимается напря­
жение и |, превышающее заданный уровень Е. Инвертирующий расшири­
тель Р, запускаемый напряжением, формирует импульс и2 с нулевым
уровнем длительностью х > ти + т3, где т„ — длительность входных им­
пульсов; т 3 — длительность задержки элемента D. Этим импульсом запи­
рается схема совпадения для всех входных импульсов, амплитуда кото­
рых превышает заданный уровень Е. Благодаря этому на выход устройст­
ва поступают все импульсы с амплитудой, меньшей Е.
г—
а)
--
— —
—
~т=г\
п
а)
_П _
Q.
П И П
в)
6)
Рис. 2. Селектор импульсов,
амплитуда которых меньше Е
Рис. 3. Селектор импульсов,
амплитуда которых находится
в диапазоне Е\...Е2
Селектор
импульсов,
амплитуда
которых
находится в диапазоне
,Е2. Структурная схема такого
селектора приведена на рис. 3,а; на рис. 3,6 изображены временные диа­
граммы, иллюстрирующие принцип ее работы. Рассматриваемый селек­
тор содержит:
=> два амплитудных селектора АС\, АС2, которые соответственно про­
пускают на выход импульсы с амплитудами, превышающими задан­
ные уровни напряжений Е\, Е 2 (рис. 3,6);
=> усилитель-ограничитель УО, на вход которого поступает напряжение
и\ с выхода селектора АС], а с выхода снимается последовательность
импульсов и3 с постоянной амплитудой (рис. 3,6);
=> инвертор, на вход которого поступает напряжение с выхода селектора
ЛС2, а с выхода снимается проинвертированное напряжение и4 с по­
стоянной амплитудой;
=> схема совпадения, или логический элемент И, с выхода которого сни­
мается напряжение иВЬ1Х= и3 щ.
Из приведенных временных диаграмм следует, что схема совпадения
открыта для импульсов, амплитуды которых лежат в диапазоне Е \ ... Е 2.
Селекторы импульсов по длительности. Рассмотрим особенности
селекторов двух типов.
Селектор
им­
пульсов,
дли­
тельность кото­
рых
больше
за­
а)
^ВХ
данной
величин ы. Один из возможных
способов селекции состо­
ит в предварительном
преобразовании длитель­
ности импульсов в ампли­
туду линейно нарастаю­
щего напряжения с после­
дующим
применением
амплитудного селектора
(рис. А,а). Принцип рабо­
ты селектора поясняется
Рис. 4. Селектор импульсов, длительность
временными диаграммами
которых больше заданной величины
(рис. 4,6).
Амплитудный
селектор выделяет импульсы с амплитудой, превышающей заданный
уровень Е. Так как скорость нарастания пилообразного напряжения ж е­
стко связана с длительностью входных импульсов, то заданному требо­
ванию строго соответствует пороговый уровень длительности селекти­
руемых импульсов. При необходимости на выходе рассматриваемого
Ивх
Преобразователь
длительности
в амплитуду
U\
Амплитудный
селектор
^ВЫХ
селектора может быть установлен формирователь импульсов, который
преобразует пилообразное напряжение на выходе амплитудного селекто­
ра в прямоугольные импульсы стандартной формы.
Селектор импульсов, длительность которых
меньше
заданной
в е л и ч и н ы . Структурная схема такого
селектора и временные диаграммы его работы приведены на рис. 5. Селектор
содержит: элемент задержки D,
дифференциатор d/dt, амплитуд­
ный ограничитель АО, инвертор и
схему совпадения И.
Входные импульсы (и Вх ) од­
новременно подаются на линию
задержки (D) и инвертор (1).
Напряжение щ на выходе эле­
мента задержки запаздывает от­
носительно входного на время т3.
В результате дифференцирова­
ния напряжения м, для каждого
импульса появляются два корот­
ких импульса (м2): положитель­
ной полярности, соответствую­
щий переднему фронту импуль­
са и и отрицательной полярно­
Ивых
сти, соответствующий заднему
фронту импульса щ. На выходе
ограничителя (напряжение) по­ Рис. 5. Селектор импульсов, длительность
которых меньше заданной величины
являются только положительные
импульсы (щ), которые подают­
ся на один из входов схемы совпадения (& ). На второй вход этой схемы
подается напряжение и4 с выхода инвертора. Выходное напряжение полу­
чается в результате перемножения: мвых = щ щ. Из временных диаграмм
следует, что на выход проходят только те импульсы, длительность которых
меньше длительности задержки, т.е. т„ < т3.
При необходимости на выходе рассматриваемого селектора может
быть установлен формирователь импульсов, создающий прямоугольные
импульсы стандартной формы.
12. ВТОРИЧНЫЕ ИСТОЧНИКИ ПИТАНИЯ
12.1. Общие сведения
Для нормального функционирования большинства электронных устройств
необходим источник питания постоянного напряжения. Ярким примером
может служить рассмотренный в п. 9.1 усилитель колебаний, принцип рабо­
ты которого базируется на отборе энергии от вспомогательного источника
постоянного напряжения. Такой источник называют вторичным источни­
ком питания (ВИП), под которым обычно понимают устройство, преобра­
зующее энергию первичного источника в постоянное напряжение (ток) с
параметрами, обеспечивающими функционирование электронной аппарату­
ры и ее отдельных узлов в соответствии с заданными требованиями. Первич­
ный источник является преобразователем одного из неэлектрических видов
энергии (механической, тепловой, химической и др.) в электрическую.
В качестве первичных источников используют:
=> промышленную сеть или автономные источники (генераторы) пере­
менного тока;
=> источники постоянного напряжения и тока (аккум уляторы , химиче­
ские батареи и др.). Отметим, что возможности непосредственного ис­
пользования этих источников весьма ограничены из-за высоких тре­
бований, предъявляемых к ВИП.
С т р у к т у р а и состав ВИП. Для общего представления о входящих в
ВИП устройствах, их назначении и роли в процессах преобразования
энергии рассмотрим обобщенную структурную схему, изображенную на
рис. 1. К основным узлам ВИП следует отнести:
=> стабилизатор входного напряжения, позволяющий уменьшить пре­
делы изменения напряжения первичного источника, а для источников
переменного тока — амплитуды, а иногда и формы напряжения и тем
самым облегчить условия работы всех последующих каскадов ВИП.
Примерами подобных стабилизаторов являются входные стаби­
лизаторы постоянного напряжения на транзисторах или феррорезонансные стабилизаторы переменного напряжения;
инвертор, который входит в состав ВИП только при первичном ис­
точнике постоянного тока и служит для того, чтобы преобразовать
постоянный электрический ток в переменный. Для уменьшения габа­
ритов ВИП частота инвертора значительно превышает частоту пи­
тающей сети. Такое преобразование необходимо для получения тре­
буемого уровня выходного напряжения с помощью трансформатора;
=> трансформатор, позволяющий изменить амплитуду переменного
напряжения для получения требуемого уровня выходного постоянно­
го напряжения;
=> выпрямитель, преобразующий переменное напряжение в постоянное;
=> сглаживающий фильтр, предназначенный для ослабления гармоник
(пульсаций) выпрямленного переменного напряжения, так как выпрями­
тель не создает на своем выходе идеального постоянного напряжения;
=> стабилизатор выходного напряжения, используемый для поддер­
жания постоянства напряжения на нагрузке или тока в ней при изме­
нениях сопротивления нагрузки, напряжения первичного источника,
параметров схемы ВИП и других дестабилизирующих факторов.
С точки зрения выходных характеристик всего ВИП, этот узел являет­
ся наиболее сложной и ответственной его частью.
В состав ВИП могут входить модифицированные устройства, а также
вспомогательные элементы и узлы, например, схемы включения, выклю­
чения и регулировки режимов работы, схемы защиты от возможных пе­
регрузок и неправильных включений, дополнительные источники пита­
ния для различных каскадов и др.
От первичного
источника
К нагрузке
Рис. 1. Структурная схема ВИП
Э лектрические пар ам етры . К основным из них относятся:
=> номинальные уровни входного Um НОм и выходного £/вых ном напряже­
ний; значение тока нагрузки и допустимые пределы его изменения;
=> коэффициент пульсаций, представляющий собой отношение ампли­
туды или действующего значения переменного напряжения на выходе
источника питания к постоянному: е = UJU=. Способность ВИП про­
пускать переменную составляющую входного напряжения задается в
виде коэффициента сглаживания q = евх/£вых;
=> относительная нестабильность выходного напряжения при изме­
нении тока нагрузки /„ и входного напряжения UBX:
8 UВЫХ (I
) = ^LLwA1''}
• и5 и
(U ) = А^J J вых ^ вх
^ Н /
J J
»
и вых\и вх/
вы х ном
’
вы х ном
где AUBblx(/H) и Ди вых(С/вх) — соответственно абсолютные изменения вы ­
ходного напряжения при заданном изменении тока нагрузки и входного
напряжения;
_ А С/__/С/_.
коэффициент стабилизации напряжения K v -
вых
ВЬ1Хном
^ ^ в х ^ ^ в х ном
=> диапазон изменения выходной мощности Рн тт---Рн max, который ино­
гда задается значениями минимального /вых mjn и максимального /вых тах
токов нагрузки;
=> коэффициент полезного действия, оцениваемый отношением вы ход­
ной мощности постоянного тока к суммарной мощности, отбираемой
от сети;
=> выходное сопротивление источника питания /?ВЬ1Х, которое определя­
ет изменение выходного напряжения А1/вых при изменении тока на­
грузки А/„.
К ВИП могут предъявляться дополнительные требования для обеспе­
чения его электрических и конструктивно-технологических параметров.
12.2. Выпрямители
Наиболее распространенным первичным источником электроэнергии явля­
ется сеть гармонического напряжения промышленной частоты 50 Гц, посто­
янная составляющая (или среднее значение) которого равна нулю. Для пита­
ния функциональных узлов необходимо постоянное напряжение. Устройст­
во, с помощью которого осуществляется преобразование переменного на­
пряжения в пульсирующее постоянное напряжение, называют выпрямите­
лем. Основными составными частями выпрямителя являются:
=> трансформатор, который выполняет две функции:
• преобразует переменное напряжение в переменное напряжение та­
кой величины, которая необходима для получения на выходе ис­
точника питания заданного постоянного напряжения;
•
осущ ествляет гальваническую развязку источника переменного
напряжения и выпрямителя;
=> вентиль, с помощью которого осуществляется преобразование пере­
менного напряжения в пульсирующее напряжение со средним значе­
нием, отличающимся от нуля. Для выполнения такой функции вен­
тиль должен обладать различным значением сопротивления для то­
ков, протекающих в противоположных направлениях (несимметрич­
ной характеристикой проводимости). В качестве вентилей нерегули­
руемы х выпрямителей используют полупроводниковые диоды, регу­
лируемых выпрямителей — транзисторы и тиристоры.
К лассиф икац ия вы прям ителей. К основным классификационным
признакам выпрямителей следует отнести:
=> число выпрямленных фаз: одно-, двух-, трех- и шестифазные выпря­
мители;
=> структуру схемы: обычные (основные) и мостовые схемы;
=> количество периодов, используемых для выпрямления: однополупериодные и двухполупериодные выпрямители;
=> управляемость: нерегулируемые и регулируемые выпрямители;
=> вид нагрузки: выпрямители с емкостной или индуктивной нагрузкой.
Принцип вы п р ям л ен и я. В ы п р я м л е н и е — это процесс пре­
образования переменного тока с нулевым средним значением в пульси­
рующий ток, протекающий в одном направлении. Для пояснения прин­
ципа выпрямления (см. п. 10.4) рассмотрим схему, составленную из трех
элементов: источника гармонических колебаний и, полупроводникового
диода VD и нагрузки RH(рис. 1,а).
Т
и
а)
6)
ч
/
Рис. 1. Схема и принцип выпрямления напряжения
Диод открыт в течение половины периода 772, когда входное напря­
жение и > 0 (рис. 1 , 6 ), и через нагрузку протекает ток г„, форма которого
повторяет форму входного напряжения (н = мн). В течение следующего
полупериода входного напряжения и диод закрыт, и ток через нагрузку
не протекает (гн = 0). Таким образом, диод действует как ключ, управляе­
мый входным напряжением: он замкнут в течение положительного полупериода и разомкнут в течение отрицательного. С хем у на рис. 1,а назы­
вают однофазной однополупериодной схемой выпрямителя.
Для оценки эффективности выпрямления представим напряжение и
ток в нагрузке рядом Фурье:
(1 )
(и„1
1 [U) 1 ft/1
2 ft/1
2 ft/1
4
4 >= —< >+ —< >coscdh----- < ^cos2a»H------- < >cos4a)/ + ---,
V „J
tcV J
2W
3n[/J
1571 [ / J
где U, I — соответственно амплитуда импульсов напряжения и тока на­
грузки.
Из (1) следует, что:
=> постоянная составляющая (среднее значение) тока нагрузки, которая
определяет полезный эффект выпрямления, равна /0 = 1/щ
=> коэффициент
пульсаций,
определяемый
как
J J 2 + J 2 + J 2 ___
кП= — ^----- ------ --------= 2,27 ; при этом амплитуда первой гармоники
/о
более чем в полтора раза превышает среднее значение тока (/) //<>= я/2 );
=> коэффициент полезного действия
ц=
V ^ =i^ E l,4 0 ,5 % ,
Рвх
0,5/,£/
0,25/С/
где U0 — среднее значение напряжения на нагрузке (U0 = UIn).
Рассмотрим схемные пути повышения эффективности выпрямления.
Принципы построения выпрямительных схем. Один из способов
уменьшения пульсаций выпрямленного напряжения состоит в использова­
нии многофазного напряжения. Это достигается благодаря тому, что в
Л'-фазной нелинейной системе при сложении откликов в спектре присутст­
вуют только колебания с частотамиМо, 2Мо, ЗМ о,..., уровень которых мал.
Если взять N схем на рис. 1,а с источниками, напряжения которых об­
разую т ./V-фазную систему, т. е. и„ = U cos (Ш - 2пn/N), гд е п = 1,...,/V, и
соединить параллельно нагрузки Rm то получим схему выпрямителя при­
веденную на рис. 2,а.
Случай N = 2 соответствует известной схеме однофазного двухполупериодного выпрямителя, в котором для получения двухфазного напряже­
ния используется трансформатор с двумя вторичными обмотками (или
одной обмоткой со средней точкой). Временные диаграммы для этого
случая приведены на рис. 2,6. Выпрямитель работает как два независи­
м ы х однополупериодных выпрямителя (рис. 1,а) на общую нагрузку. Та­
кую же картину можно наблюдать и при N > 3. На рис. 2,в изображены
временные диаграммы для N = 3, из которых следует, что каждая фаза
трехфазного источника напряжения задействована в процессе выпрямле­
ния одну треть периода Т. Она снабжает нагрузку током в те моменты
времени, когда ее напряжение превышает напряжения других фаз.
«I
VD,
- е - -й VD„
-Q KD.v
-0 - - й а)
Рис. 2. Схема Л'-фазного выпрямителя (а) и временные диаграммы
для N = 2 (б) и N = 3 (в)
Другой подход к построению схемы многофазного выпрямителя состоит в
использовании исходного модуля (рис. 3,6) с двумя диодами, который получа­
ется путем объединения источников и двух элементарных выпрямителей
(рис. 3,а). Если взять N таких модулей с источниками, напряжения которых
образуют /V-фазную систему, и также соединить параллельно нагрузки, то по­
лучим схему многофазного выпрямителя (рис. 3,в). Благодаря соединению фаз
источника в звезду отсутствует необходимость в нулевом проводе, поэтому
два нагрузочных сопротивления объединены в одно сопротивление RH.
VD, 2 i
-е -е vd 2а
а)
Рис. 3. Схема Л'-фазного выпрямителя с числом вентилей, равным 2N
Частный случай N = 2 приводит к известной однофазной мостовой
схем е (рис. 4 ,а). Действительно при N = 2 звезда вырождается в последо-
вательное соединение двух встречно включенных источников напряж е­
ния М| и и2 с противоположными направлениями (рис. 3,в), которые м ож ­
но объединить в один источник и. Временные диаграммы, иллюстри­
рующие работу однофазного мостового выпрямителя, приведены на
рис. 4,6. При и > О ток протекает по цепи: источник +и —> диод VD\ —>
нагрузка RH—>диод К/34 —> источник -и; при и > 0 — в обратном направ­
лении по цепи: источник (+)и —>диод KD3 —>нагрузка
—» диод VD2 —>
источник (—)м.
(-г-Л+Л
Я.П|
VD,
Рис. 4. Однофазная мостовая схема (а) и принцип ее работы (б);
временные диаграммы для схемы Ларионова (в)
Другой частный случай N = 3 соответствует известной схеме Ларио­
нова. На рис. 4,в изображены временные диаграммы, на которых указаны
источники, снабжающие нагрузку током на данном отрезке времени. На­
пример, на интервале 0...776 напряжение и, - и3 > и, - и2 > и2 - щ, поэто­
м у задействованы источники ии щ и на рис. 4,в сделана пометка 1-3. Ток
протекает по цепи (см. рис. 3,e): ii\ —> VD] —>RH—> VD6 —> щ. Пользуясь
пометками, нетрудно установить порядок переключения диодов и про­
следить протекание тока по активным цепям.
С р авн и тел ьн ая оценка вы п р ям и тел ьн ы х схем. При сопоставлении
схемных решений следует иметь в виду, что для получения требуемого
значения выпрямленного напряжения на входе выпрямителей включены
трансформаторы (рис. 5).
Однофазная
схема
(рис. 5,а). Достоинства: простота
(один диод и трансформатор с двум я обмотками); относительно неболь­
шое полное напряжение на вторичной обмотке трансформатора, близкое
к выпрямленному.
Н едостатки: переменные составляющие токов в обмотках трансфор­
матора превышают постоянную составляющую тока нагрузки, поэтому
габаритную мощность трансформатора приходится увеличивать более
чем в 2 раза по отношению к выпрямленной мощности; наличие вынуж­
денного подмагничивания, низкая частота пульсаций и большая их вели­
чина, большие потери в схеме от переменных составляющих токов, зна­
чительное выходное сопротивление.
Д в у х ф а з н а я с х е м а (рис. 5,6). Достоинства: по сравнению
с однофазной схемой более высокая эффективность выпрямления и час­
тота пульсаций; возможность использования однофазного источника на­
пряжения; отсутствие тока подмагничивания во вторичной обмотке;
меньшее число диодов по сравнению с мостовой схемой.
Н едостатки: обратное напряжение, прикладываемое к полупро­
водниковым диодам, в два раза выше по сравнению в однофазной
схемой; наличие переменных составляющих тока в обмотках трансфор­
матора; асимметрия вторичных обмоток вызывает пульсации с частотой
входного напряжения.
а)
б)
VD2
в)
Рис. 5. Выпрямительные схемы с однофазным источником питания
Мостовая
с х е м а (рис. 5,в). Достоинства: простой транс­
форматор, с одной первичной и одной вторичной обмоткой; отсутствие
подмагничивания трансформатора; в два раза меньшее обратное напря­
жение, прикладываемое к диодам.
Н едостатки: снижение выпрямленного напряжения; увеличение вы­
ходного сопротивления из-за последовательного соединения диодов; воз­
никновение постоянного потенциала, равного половине выпрямленного
напряжения, на вторичной обмотке трансформатора.
Т р е х ф а з н ы е с х е м ы (рис. 2,а; рис. 3,а; N = 3). Достоинства'.
высокий уровень выпрямленного напряжения, малый коэффициент пульса­
ций, так как частота пульсаций в 3 и 6 раз превышает частоту входного на­
пряжения. Схема Ларионова (рис. 3,а) имеет меньшие значения коэффици­
ента пульсаций (= 5,7%) и обратного напряжения на диодах и почти в два
раза большее выпрямленное напряжение.
Н едостаток: сложная конструкция трехфазного трансформатора.
У п р авл яем ы е вы п р ям и тел и . Использование в выпрямителе вместо
полупроводниковых диодов тиристоров (или транзисторов) позволяет
изменять уровень выходного напряжения. В управляемый выпрямитель
тиристор включается как обычный вентиль, а к его управляющему элек­
троду подводятся от цепи управления импульсы, включающие тиристоры
с запаздыванием на некоторое время т (угол а ), по отношению к выпрям­
ляемому напряжению.
Особенности этого типа устройств рассмотрим на примере простей­
шего однополупериодного тиристорного выпрямителя, содержащего по­
мимо нагрузки R„ триодный тиристор (тринистор) VS и схему управле­
ния (рис. 6,а). Принцип регулирования состоит в изменении длительно­
сти ТИ(площади) выпрямленного напряжения мн с помощью импульсов
включения тиристора гвкл, формируемых схемой управления (рис. 6,6).
Схема управления тиристором содержит динистор VD, конденсатор
С и резистор R. При входном напряжении г/вх > 0 под действием управ­
ляющего тока гупр = const начинает заряжаться конденсатор С. Когда на­
пряжение ис на конденсаторе достигает значения (/вкл, динистор перехо­
дит в проводящее состояние. Конденсатор С разряжается через динистор
VD, управляющий переход тиристора VS и резистор R, формируя импульс
гвкл- Тиристор переходит в открытое состояние и на нагрузке формирует­
ся импульс напряжения и„ длительностью Ги. При снижении разрядного
тока до величины /ВЬ[КЛ динистор переходит в состояние отсечки и кон­
денсатор С получает возможность вновь заряжаться током /упр. Тиристор
выключится при ивх = 0 .
УВх
о
-упр
VD
vs V
Z r~
б)
Рис. 6. Управляемый тиристорный выпрямитель и принцип его работы
При изменении величины тока гупр изменяется продолжительность
заряда конденсатора С до напряжения UBKJl, момент времени т включе­
ния тиристора (т ь т2), а следовательно, и уровень выпрямленного на­
пряжения (рис. 6 , 6 ). Например, при т = 0 тиристор FS открыт в течение
половины периода Т„ = Г/2 и среднее напряжение на нагрузке имеет
максимальное значение, равное U0 = 0,3181/; при т = Г/8 — Ги = ЗГ/8 ,
U0 = 0,27С/; при т = Г/4 — Ги = Г/4, U0 = 0,159U.
На рис. 7,а приведена схема двухполупериодного тиристорного выпрями­
теля со средней точкой. При использовании тиристоров в выпрямительных
схемах следует иметь в виду, что скачкообразное изменение сопротивления в
момент их открывания может привести к очень большим броскам тока. Осо­
бенно велики эти броски при емкостной нагрузке, сопротивление которой в
начальный момент близко к нулю. Поэтому для уменьшения бросков тока
последовательно с тиристором включают дроссель L. Диод VD обеспечивает
запирание тиристора при мк = 0. Через него начинает протекать разрядный ток
дросселя после запирания тиристора. При отсутствии диода в момент прекра­
щения тока через дроссель на его выводах наводится ЭДС, которая препятст­
вует запиранию тиристора.
+
Rh
Рис. 7. Схемы двухполупериодного тиристорного выпрямителя
со средней точкой (а) и мостового выпрямителя с регулированием
выходного напряжения (б)
В ряде случаев для регулирования выходного напряжения выпрями­
теля тиристоры включают в цепь переменного тока (рис. 7,6).
В ы п рям и тели с умножением н ап ряж ен и я. Полупроводниковые
диоды имеют ограниченное значение обратного напряжения. Поэтому
источники питания высоковольтных потребителей (например, электрон­
но-лучевых трубок) строятся с умножением напряжения, используя в
качестве накопительных элементов конденсаторы, способные сохранять
заряд. С хем а такого выпрямителя изображена на рис. 8 ,а. В его состав
входят трансформатор, N последовательно включенных полупроводни­
ковых диодов и N конденсаторов, разделенных на две последовательные
цепи. Схема соединения диодной цепи, емкостных цепей и нагрузки, а
также их подключение к вторичной обмотке трансформатора для двух
значений N (нечетных N = 5 и четных N = 6) показана на рис. 8 ,а.
с,
_ ,.-4 .
Д„
“ II
II
VD|
— и-
---------- 1__ н
С4
"IIII
VDi
-й — J
VD4
-Й — 1
VDз
D
О
с ‘+
“ II
II
VDi
м
VD6
ы—
„
( )
VDt V.
V D ,ll
VDS 3 1
c,
Сз
c5
_c2+
_cu6)
_c6+
V D ,li
VD, i i
V D bli
Ян
-сгэa)
C,
c,
c,
ej
Рис. 8. Выпрямитель с умножением напряжения
Рассмотрим процессы заряда конденсаторов в переходном режиме,
полагая, что:
=> напряжение на вторичной обмотке трансформатора изменяется по
синусоидальному закону (рис. 9,а)\
=> нагрузка RHотключена от выпрямителя;
=> конденсаторы сохраняют накопленный заряд и для наглядности изо­
бражены на рис. 9 в виде источников постоянного напряжения.
На интервале времени 0...Т/4 при действии положительной полувол­
ны входного напряжения и открыт диод KD, и конденсатор С, заряжается
до максимального напряжения UC\ = U, где U — амплитуда напряжения
на вторичной обмотке трансформатора (рис. 9,6), после чего диод VD\
отключается и открывается диод VD2 (рис. 8 ,а). Под действием напряже­
ния и + Uci на интервале Т/4. . . 3774 заряжается конденсатор С2 до напря­
жения Uс2 = 2 U (рис. 9,в). На интервале 3774...5Г/4 (рис. 9,г,в) через диод
VD] под действием напряжения и+ UC\+ UC2 до напряжения Ucз = 2U
заряжается конденсатор С3 и т. д.
Как видно из рис. 9 на котором показаны все стадии заряда конденса­
торов, конденсатор Сi заряжается до напряжения U, остальные конденса­
торы — до напряжения 2U. Следовательно, выпрямительная схем а на
рис. 8 ,а позволяет получить напряжение на нагрузке URh= NU, где N —
количество диодов и конденсаторов.
При подключенной нагрузке /?„ конденсаторов теряют часть заряда.
Поэтому в установивш емся режиме потерянный заряд восстанавливается:
во время действия положительных полуволн входного напряжения и
через последовательно во времени открывающиеся диоды VD\, VD3,
VDS (рис. 8 ,6 );
во время действия отрицательных полуволн напряжения и через дио­
д ы VD2, VD4, VD6 (рис. 8 ,в; при jV = 5 диод VD6 отсутствует).
0..Т/4
3774...5774
7774...9774
с4
Сг
нЫ
—
О
к о , 31 « ( ; )
vd |
н[± -1
с,
г)
С,
б;
га,II
и (О
с,
ко,
С,
С,
5Т/4...7Т/4
С,
С
га,
9774... 11774
Cj +
- Cj+
Н1----J------||—
»(Т)
С,
е;
га 4i
■ J r f W
и( )
VD2
Сб +
r - r ^
VDa
VD„ $
с,
с,
с,
с,
с,
д)
ж)
Рис. 9. Последовательность заряда конденсаторов в выпрямителе
с умножением напряжения
Выпрямитель с удвоением напряжения можно построить путем объе­
динения двух однополупериодных выпрямителей с емкостным фильтром
(рис. 10,а ). После исключения нулевого провода 1-2, по которому не
протекает постоянный ток, и объединения сопротивлений /?н, и Rh2 полу­
чим с х ем у удвоителя напряжения (рис. 10,6). При и > 0 осущ ествляется
подзаряд конденсатора С\, при и < 0 — конденсатора С2. Напряжение на
нагрузке ЯИравно сумме напряжений на конденсаторах.
На рис. 11 приведена схема, позволяющая как умнож ать, так и де­
лить напряжение (в четыре раза).
При у м н о ж е н и и н а п р я ж е н и я источник и подключается
к заж им ам 1-1, нагрузка — к зажимам 2 -2 . В первой половине периода
(при и > 0 ) после замыкания ключа К { параллельно источнику входного
напряжения подключаются цепи VD'„ —С„ — VD"n (п = 1 ,2 , 3, 4) и все
конденсаторы заряжаются до напряжения, равного амплитуде U. Во вто­
рой половине периода (при и < 0) замыкается ключ К2 и последователь­
ная цепь С, - VDi - С2 - VDi - С 3 - KD3 - С4 подключается к нагрузке,
благодаря чему на нагрузке создается напряжение 4 £/.
HDi
—
□
*В1
Сг
и
—
с ,=
+
-X+
С2=га)
гОЛи
L
С2'й )|
б)
Рис. 10. Выпрямитель с удвоением напряжения
При д е л е н и и н а п р я ж е н и я источник и подключается к за­
жимам 2-2, нагрузка — к зажимам 1-1. В первой половине периода (при и > 0)
после замыкания ключа К2 к источнику входного напряжения подключаются
последовательная цепь С\ - VD\ - С2 - VD2 - С3 - VD3 - С4. Поэтому каждый
конденсатор заряжается до напряжения UI4. Во второй половине периода (при
и < 0) замыкается ключ К\ и цепи VD'„ - Сп- VD"„ (п= 1 ,2 ,3 ,4 ) подключают­
ся параллельно нагрузке, создается на ней напряжение, равное U!4.
Основное достоинство схем умножения — возможность получения
очень высоких напряжений при использовании вентилей с малыми мак­
симально допустимыми (пробивными) напряжениями. И з-за большого
выходного сопротивления и низкого КПД их применяют лиш ь при малых
токах. Делители напряжения имеют ограниченное применение.
12.3. Сглаживающие фильтры
Выпрямитель преобразует переменное напряжение в пульсирующее. Для
нормальной работы большинства электронных устройств необходимо
постоянное напряжение питания. Например, для питания электронно­
лучевых трубок коэффициент пульсации выпрямленного тока не должен
превышать 0,5% [47]. Такие пульсации могут быть обеспечены только
путем фильтрации выпрямленного напряжения. Ф и л ь т р а ц и я
—
процесс преобразования пульсирующего тока в постоянный ток. Эта опе­
рация реализуется с помощью сглаживающих фильтров, включенных
между выпрямителем и нагрузкой. Так как выходная мощность выпрями­
теля изменяется во времени, сглаживающий фильтр должен содержать
хотя бы один реактивный элемент, запасающий избыток (по отношению
к среднему значению) мощности в моменты наибольших значений, и от­
дающий запасенную мощность в нагрузку в моменты наименьшей мощ­
ности. Таким элементом может служить конденсатор. При использовании
дросселя нельзя получить малое выходное сопротивление для перемен­
ных составляющих тока нагрузки, поэтому для его снижения дополни­
тельно включают второй реактивный элемент — конденсатор.
Использование того или иного фильтра влияет на процессы, происхо­
дящие в выпрямителе, поскольку цепи переменного и выпрямленного
тока связаны через вентили. Поэтому включение реактивного элемента в
выходную цепь выпрямителя сказывается на величине и форме тока в
цепи переменного тока, т.е. в обмотках трансформатора.
При сложных схемах фильтра характер процессов в выпрямителе оп­
ределяется той реактивностью, которая создает основное сопротивление
переменной составляющей выпрямленного тока. Другие реактивные эле­
менты фильтра не меняют характер процесса, а сказываются лишь на его
количественных показателях.
Сглаживающий фильтр является нагрузкой (или ее частью) выпрями­
теля и может существенно влиять на его работу. Рассмотрим особенности
работы мостового выпрямителя с идеальными диодами при емкостной и
индуктивной нагрузке.
Работа вы п р ям и тел я на ем костную н агр узк у. В простейшем случае
фильтром служит конденсатор С, включенный параллельно нагрузке R„
(рис. \,а). Такое схемное решение используется в высоковольтных вы­
прямителях и выпрямителях малой мощности. Фильтрующие способ­
ности конденсатора можно объяснить накоплением электрической энер­
гии в течение времени, когда диоды выпрямителя открыты, и ее воз­
вратом в нагрузку, когда диоды закрыты. В области максимальных абсо­
лютных значений напряжения |ивх|, когда открыты диоды мостовой схе­
мы, конденсатор С заряжается до максимального значения U, после чего
диоды закрываются и конденсатор разряжается на нагрузку R„ до напря­
жения ис = |и„х|- Если Хс « R», то протекающий через диоды ток
(г = Cduc/dt) имеет форму коротких импульсов. Процессы периодически
повторяются (рис. 1,6). В схеме действуют как бы два источника энергии:
часть периода, когда диоды открыты, источником энергии является сеть,
в остальное время — конденсатор. Благодаря этому происходит резкое
возрастание постоянной составляющей напряжения на нагрузке и
уменьшение пульсаций.
заряд
разряд
Рис. 1. Работа выпрямителя на емкостную нагрузку
Работа в ы п р ям и тел я на индуктивную н агр узку. В простейшем
случае фильтром может служить дроссель L, включенный последова­
тельно с нагрузкой RH(рис. 2,а). Такое схемное решение характерно для
низковольтных выпрямителей и выпрямителей большой мощности.
Дроссель обладает способностью накапливать и сохранять магнитную
энергию. Поэтому он проявляет инерцию к току и препятствует любым
его изменениям. Так как в схеме на рис. 2,а через дроссель и нагрузку
протекает один и тот же ток, то уменьшение пределов его изменения рав­
носильно сглаживанию напряжения на нагрузке.
При возрастании тока в дросселе происходит накопление магнитной
энергии, а при уменьшении — накопленная энергия возвращается в под­
ключенную к дросселю цепь, по сути дела, отдается в нагрузку (рис. 2,а).
Форма протекающего через дроссель тока зависит от количества запа­
сенной энергии.
Если запасенной энергии в дросселе достаточно для снабжения на­
грузки током в течение всего того интервала, когда мгновенная мощность
в сети переменного тока меньше мощности, потребляемой нагрузкой, то
ток в дросселе (выпрямленный ток) будет непрерывным. В этом случае в
выпрямителе всегда открыт какой-нибудь из вентилей. В противном слу­
чае, при малом запасе энергии в дросселе, ток получается разрывным,
пульсирующим. В те моменты, когда он равен нулю, все вентили выпря­
мителя заперты. Такая ситуация может иметь место в однополупериодной схеме выпрямителя. В двухполупериодном выпрямителе ток через
дроссель (и нагрузку) при достаточно большой индуктивности L прохо­
дит непрерывно: в одном полу периоде — через диоды VDh VD4, в дру­
гом — через диоды VD2, VDy. При XL » RHток (i = L x\udt) имеет форму,
близкую к гармонической (рис. 2 , 6 ).
Рис. 2. Работа выпрямителя на индуктивную нагрузку
Для уменьшения пульсаций используют последовательное включение
нескольких Г- или П-образных звеньев. При этом могут использоваться
как однотипные, так и разнотипные фильтры.
12.4. Стабилизаторы
К стабильности параметров выходных электрических величин вторичных
источников электропитания предъявляют жесткие требования (до 0 , 1 %
номинального значения), которым можно удовлетворить только с
помощью специальных устройств — стабилизаторов. С т а б и л и з а ­
т о р о м называют устройство, поддерживающее с требуемой точно­
стью пределы изменения заданной выходной электрической величины
при изменении входного напряжения, нагрузки, температуры и других
дестабилизирующих факторов. Наиболее часто стабилизуемой электри­
ческой величиной является напряжение, реже ток. Среди стабилизаторов
напряжения выделяют стабилизаторы постоянного и стабилизаторы пе­
ременного напряжения. Стабилизируемый параметр определяется назна­
чением и схемным решением источника питания. Им может быть посто­
янный уровень, мгновенное, среднее или действующее значения.
В дальнейшем основное внимание уделено стабилизаторам постоян­
ного напряжения, которые разделяются на два вида: параметрические и
компенсационные стабилизаторы.
Параметрические стабилизаторы постоянного напряжения. Этот вид
стабилизаторов поддерживает постоянство выходного напряжения за счет
нелинейности вольт-амперной характеристики используемого полупровод­
никового элемента — стабилитрона. Типовая схема параметрического ста­
билизатора представляет собой последовательное соединение гасящего ре­
зистора Rr и стабилитрона VD, к которому подключена нагрузка RH(рис. 1,а).
Для пояснения принципа стабилизации выходного напряжения при измене­
нии входного воспользуемся рис. 1,6, на котором изображены:
=> результирующая волът-ачперная характеристика стабилитрона и
нагрузки, полученная суммированием характеристик (пунктир), для
VD и RH;
=> нагрузочные прямые для двух значений входного напряжения ( E mi„,
£max)> построенные по уравнению U = E -R r I для схемы н а рис. 1,а.
Из рис. 1,6 видно, что:
=> при изменении входного напряжения на величину АЕ выходное на­
пряжение изменяется в меньших пределах A U;
=> увеличение сопротивления нагрузки RHуменьшает крутизну резуль­
тирующей вольтамперной характеристики.
Рис. 1. Типовая схема параметрического стабилизатора и особенности ее работы
Для иллюстрации влияния сопротивления на рис. 1,в изображены ре­
зультирующие вольт-амперные характеристики для двух значений сопро­
тивления нагрузки RH. Так как с увеличением сопротивления R„ крутизна
результирующей характеристики уменьшается, при одинаковых пределах
АЕ изменения входного напряжения происходит увеличение пределов
изменения выходного напряжения, т.е. At/2 >
Основные
параметры
с т а б и л и з а т о р о в . К ним
следует отнести:
=> коэффициент стабилизации напряжения, представляющий собой от­
ношение относительного изменения напряжения на входе ста­
билизатора к относительному изменению напряжения на его выходе:
kCI = (АЕ/Еср) /(AU/Ucp) , где Еср, Ucp — средние (или номинальные)
значения входного и выходного напряжений;
=> выходное сопротивление, характеризующее изменение выходного
напряжения при изменении тока нагрузки: R = IАС/вых / /ср I, где /ср =
0,5(/max Anin)-
Достоинство параметрических стабилизаторов постоянного напря­
жения — простота схем; недостаток — низкие КПД и нагрузочная спо­
собность (малые токи нагрузки), отсутствие возможности регулирования
выходного напряжения, небольшой коэффициент стабилизации.
Компенсационные стабилизаторы. Этот тип стабилизаторов по срав­
нению с параметрическими стабилизаторами обеспечивает большую ста­
бильность и более широкий диапазон стабилизируемых напряжений при
изменениях тока нагрузки и, кроме того, позволяет регулировать выходное
напряжения. Компенсационный стабилизатор представляет собой систему
автоматического регулирования, содержащую измеритель текущего значе­
ния выходного напряжения, источник опорного напряжения, схему сравне­
ния и регулирующий элемент. Цель регулирования — препятствовать любым
изменениям выходного напряжения относительно опорного напряжения. В
процессе регулирования происходит измерение выходного напряжения,
сравнение его с опорным напряжением и формирование сигнала рассогласо­
вания (ошибки), который, воздействуя на регулирующий элемент, уменьшает
ошибку и устанавливает заданный уровень выходного напряжения. На рис. 2
приведен один из возможных вариантов схемы компенсационного стабили­
затора непрерывного действия, в котором:
=> в качестве регулирующего элемента используется транзистор VT. Рези­
стор R] в базовой цепи транзистора предназначен для выбора режима
транзистора. Сопротивление транзистора изменяется под воздействием
сигнала ошибки таким образом, что выходное напряжение U стабилизи­
руется;
=> источником опорного напряжения Uon служит цепочка из резистора Я2
и стабилитрона VD;
=> измерение выходного напряжения и ты осущ ествляется с помощью
резистивного делителя напряжения R3, Л4;
схема сравнения и формирователя сигнала ошибки Uom = Umu — Uon
выполнена на операционном усилителе DA. На его выходе формиру­
ется управляющее напряжение
= KoyUaul.
■ \ 2Г
VT
t/v,
DA
uw
VDlZ R4 у
Рис. 2. Схема компенсационного стабилизатора непрерывного действия
Рассмотрим процессы в схеме на рис. 2 при изменении входного напряже­
ния Е. При увеличении Е увеличиваются напряжения U и UKM. Так как напря­
жение Umu подается на инверсный вход операционного усилителя, снимаемый
с его выхода сигнал управления U^ уменьшается и стремится запереть тран­
зистор VT. Протекающий через транзистор VT ток уменьшается и препятству­
ет росту напряжения на нагрузке. При уменьшении Е ток через транзистор VT
возрастает, что препятствует уменьшению напряжения U на нагрузке.
Достоинства компенсационных стабилизаторов постоянного напря­
жения непрерывного действия: высокая точность стабилизации выходно­
го напряжения; малое выходное сопротивление. Н едостаток— малый
КПД, который связан с непрерывным выделением мощности на регули­
рующем транзисторе, что увеличивает его объем и массу стабилизатора.
Импульсные стабилизаторы. Для устранения указанного выше недос­
татка компенсационных стабилизаторов используется импульсный способ
регулирования, при котором постоянное входное напряжение Е преобразуется
в периодическую последовательность прямоугольных импульсов с перемен­
ной длительностью (или скважностью). С помощью сглаживающего фильтра
из последовательности выделяется постоянная составляющая, значение кото­
рой пропорционально длительности импульсов. Изменяя длительность, или
скважность, импульсной последовательности, можно поддерживать выходное
напряжение на одном заранее заданном уровне при изменениях, как входного
напряжения, так и тока нагрузки.
Схема силовой часть импульсного стабилизатора приведена на рис. 3,а и
представляет собой /.С-фильтр (с диодом VD), подключаемый с помощью
ключа К к источнику постоянного напряжения Е.
е
\
и j
a)
11
/2
б)
Рис. 3. Схема силовой части импульсного стабилизатора и принцип его работы
При замкнутом состоянии ключа (/1.../2) к i C -фильтру прикладывается
напряжение и = Е, под действием которого происходит нарастание тока в
дросселе (г ~LA\Edt). Происходит отбор энергии от источника и накопление ее
в дросселе L. На интервале t2...h, когда ключ К разомкнут, ток i дросселя,
протекая чфез диод VD, отдает накопленную энергию в нагрузку /?„. Нетрудно
убедиться в том, что путем изменения времени замкнутого состояния ключа
(7з = h~ /1) можно регулировать постоянную составляющую тока (рис. 3,6).
L
VT
и
VD,
Ф орм и ровател ь
VDi* Rt
Рис. 4. Схема импульсного стабилизатора
На рис. 4 приведена схема импульсного стабилизатора. На входы формиро­
вателя поступают управляющие импульсы ир с частотой следования F,
опорное напряжение Uon и напряжение UmM, пропорциональное выходному
напряжению U. Формирователь преобразует сигнал ошибки Uam= UmM- U0„
в управляющее напряжение г/упР. С увеличением ошибки Umu уменьшается
длительность замкнутой фазы ключа, поэтому происходит стабилизация
выходного напряжения. Для получения сигналов с широтно-импульсной
модуляцией можно использовать:
=> мультивибратор (см. рис. 5, п. 11.4), у которого базовые цепи управ­
ляются током, пропорциональным сигналу ошибки;
=> компаратор, на входы которого подаются сигнал ошибки и пилооб­
разное напряжение.
Достоинство импульсного способа регулирования состоит в том, что на
ключевом регулирующем элементе рассеивается малая мощность, которая
складывается из трех составляющих: мощности, рассеиваемой ключом в
замкнутом состоянии, в разомкнутом состоянии и во время перехода ключа
из замкнутого состояния в разомкнутое и обратно. Для идеального ключа в
замкнутом состоянии падение напряжения равно нулю, в разомкнутом со­
стоянии ток равен нулю. Мощность потребляется только во время перехода
ключа из замкнутого состояния в разомкнутое и обратно, поскольку в эти
моменты времени напряжение и ток имеют конечное значение. Средняя
мощность, рассеиваемая на реальном транзисторе намного меньше, чем при
его работе в стабилизаторах непрерывного действия. Поэтому импульсные
стабилизаторы по сравнению с непрерывными имеют более высокий КПД.
Путем повышения частоты коммутации ключей до значений, близких к гра­
ничным частотам мощных транзисторов, можно значительно улучшить мас­
согабаритные показатели импульсного стабилизатора. Предельные частоты
коммутации достигают десятки — сотни мегагерц.
К недостаткам импульсных стабилизаторов следует отнести слож­
ность как силовой, так и управляющей схем, а также возможное появле­
ние импульсных помех, не поддающихся фильтрации.
12.5. Конверторы и инверторы
К онверторы. Вторичный источник питания должен создавать постоянное
напряжение с таким уровнем, который обеспечивает требуемые режимы
работы функциональных узлов электронной аппаратуры. При использова­
нии первичных источников постоянного напряжения для питания узлов
исходный и требуемый уровни, как правило, не совпадают. Такие источни­
ки отдают в нагрузку электрическую энергию только с некоторым опреде­
ленным уровнем напряжения и не обеспечивают достаточной его стабиль­
ности. Согласование уровней осуществляют специальные преобразовате­
ли-конверторы. Конвертором называют такой вторичный источник пита­
ния, который преобразует электрическую энергию постоянного напряжения
одного уровня в другой. Для изменения уровней постоянного напряжения
используют трансформаторы. Поэтому в конверторе осуществляется:
=> сначала преобразование постоянного напряжения в переменное;
=> изменение уровня переменного напряжения с помощью трансформатора;
=> затем обратное преобразование переменного напряжения в лостоянное.
Конвертор включает в себя (рис. 1):
=> преобразователь постоянного напряжения в переменное напряжение
обычно прямоугольной формы, называемый инвертором;
=> повышающий или понижающий трансформатор, обеспечивающий
требуемый номинал выходного постоянного напряжения;
=> выпрямитель и фильтр, преобразующие переменный ток в постоянный.
Современные конверторы могут иметь несколько выходов с разными но­
миналами напряжений и содержать ряд вспомогательных устройств, предна­
значенных для стабилизации, регулировки, защиты и других функций. Широ­
кое применение конверторов обусловлено наличием мобильных устройств и
аппаратов с автономными первичными источниками постоянного напряжения
(аккумуляторы, гальванические элементы, солнечные батареи и др.).
Рис. 1. Структура конвертора
И нверторы. Для получения переменного напряжения в инверторах
используют ключи-коммутаторы, с помощью которых разные полюса
нагрузки периодически подключаются к источнику постоянного напря­
жения. Инверторы и выпрямители выполняют взаимно обратные функ­
ции. Поэтому схема инвертора может быть получена из схемы выпрями­
теля, подключив к его входу нагрузку, а к выходу источник постоянного
напряжения и заменив диоды на транзисторы (рис. 2,а и 3,а).
Если в мостовой схеме (рис. 2,а) подавать в первой половине периода
Т открывающееся напряжение на транзисторы VT\ и VT4, а во второй по­
ловине периода Т — на транзисторы VT2 и УТЪ, то на нагрузке появятся
разнополярные импульсы прямоугольной формы (рис. 2,6).
Вариант полумостовой схемы представлен на рис. 2,в. Конденсаторы Сi, С2
заряжены до напряжения Е/2, и их можно считать источниками напряжения, а
точку соединения конденсаторов Q, С2 — искусственной средней точкой ис­
точника Е. Поэтому при открывании транзистора VT|нагрузка RHподключается
к конденсатору С], а при открывании транзистора VT\ к конденсатору С^. Следо­
вательно, амплитуда импульсов в два раза меньше, чем в мостовой схеме.
Рис. 2. Мостовая схема инвертора (я) и принцип ее работы (б);
полумостовая схема (в)
Схема инвертора на рис. 3,а получена из однофазной двухполупериодной схемы выпрямителя. Использование в ней трансформатора позво­
ляет получить требуемый уровень выходного напряжения.
"Н Ы А
Luu J
ВЫЛ
ЬйЛ
Рис. 3. Двухтактные схемы инвертора с независимым возбуждением (а)
и с самовозбуждением (б)
Транзисторные инверторы с независимым возбуждением (по сути дела,
усилители мощности) применяют для получения выходной мощности пере­
менного тока в десятки — сотни ватт. При более высоких уровнях мощности
инверторы строят на тиристорах. При выходной мощности единицы — де­
сятки ватт лучшие показатели имеют схемы инверторов с самовозбуждением
(рис. 3,6). Делитель напряжения R\, R2 обеспечивает усилительный режим
работы транзисторов. Поэтому после подачи напряжения Е благодаря поло­
жительной обратной связи, создаваемой с помощью обмоток w2, начинается
процесс генерирования колебаний. Инвертор отличается от рассмотренных в
параграфе 10.1 автогенераторов тем, что вместо колебательного контура ис­
пользуется апериодическая нагрузка. Поэтому положительная обратная
связь действует в широкой полосе частот. Генерируемые колебания содер­
жат высшие гармоники и имеют форму прямоугольных импульсов.
Инверторы с самовозбуждением часто применяют в качестве возбудите­
лей для управления мощными инверторами с независимым возбуждением.
Р а зд е л 4
ЦИФРОВЫЕ УСТРОЙСТВА
ВВЕДЕНИЕ
К цифровым устройствам относятся функциональные узлы, предназна­
ченные для выполнения различных операций над объектами информации
в виде цифровых сигналов, для представления которых служат кодовые
слова. Особенность кодовых слов состоит в том, что:
=> для их построения используется простейший алфавит, состоящий из двух
букв, которые обозначаются символами «О» и «1». Во многих случаях эти
символы отождествляются с арабскими цифрами, и тогда кодовое слово
представляет собой число в двоичной системе счисления;
=> число букв в кодовом слове, как правило, фиксировано, т.е. кодовые сло­
в а имеют одинаковую длину. Если кодовое слово содержит М букв, или М
разрядов, то из них можно построить 2м кодовых слов. Например, при
М = 2 можно построить 2 2 = 4 слова: 00, 01, 10, 11. В настоящее время
используют 32-разрядные слова, которые позволяют закодировать
2 = 4 294 967 296 информационных объектов. Единицей для оценки ко­
личества цифровой информации служит один символ кодового слова (так
ж е как символы алфавита типографской продукции), или бит, соответст­
вующий одному разряду (логическому 0 или 1) кодового слова.
С информационной точки зрения функции цифрового устройства в об­
щем случае состоят в преобразовании А/-разрядного двоичного числа (вход­
ного слова) в Л/-разрядное двоичное число (выходное слово), значение кото­
рого зависит от 2м значений поступившего входного слова. Поэтому выход­
ное слово представляет собой функцию, аргументами которой являются
входные слова. Такие функции и операции над ними изучаются в разделе
математики, называемом алгеброй логики или булевой алгеброй (по имени ее
основателя английского ученого Буля). В булевой алгебре символы « 0 » и «1 »
называют логическим нулем и логической единицей, а функции, аргумента­
ми которых являются логические 0 и 1, — логическими, переключательными
функциями или функциями алгебры логики.
Таким образом, главная особенность цифровых устройств состоит в
том, что объектом информации являются двоичные числа, или кодовые
слова, а не функции времени, с которыми оперируют аналоговые и им­
пульсные устройства. Эта особенность объекта информации отражается
на принципах функционирования цифровых систем.
Принцип функционирования цифровых систем. Работу цифровых
систем можно представить следующим образом:
=> для выполнения той или иной команды (функции, операции, преобразова­
ния) отводится определенное время. Для этого используется генератор так­
товых импульсов, который в общем случае формирует многофазную сис­
тему импульсов в виде управляющих сигналов, предназначенных дня ак­
тивизации начала выполнения отдельных операций команды;
=> после активизации начала операции происходит преобразование всех
входных кодовых слов (логических нулей и единиц) в требуемые вы­
ходные кодовые слова;
=> выходные кодовые слова отправляются на хранение в пам ять цифро­
вой системы, если потребуются в дальнейшем, или во внешнее уст­
ройство для выполнения определенных действий.
Исходя из этого, вполне понятно стремление разработчиков цифро­
вых систем к повышению тактовой частоты.
Способы представления и обработки кодовых слов. Д ля реализа­
ции операций над кодовыми словами необходимо представить их в виде
электрических сигналов. Наибольшее распространение получил потенци­
альный способ представления, при котором одному из символов, напри­
мер логическому 0 , соответствует низкий уровень напряжения, а друго­
му — высокий. Под операцией будем понимать любое действие, приво­
дящее к изменению выходного слова по отношению к входному. Для вы­
полнения операции (обработки информации) на вход(ы) устройства пода­
ется цифровой сигнал в течение некоторого фиксированного промежутка
времени. На время выполнения операции состояние входов устройства
остается неизменным. Операция над кодовым словом может выполняться
двумя основными способами:
=> последовательное (поразрядное, побитное) выполнение операции, при
котором символы кодового слова поступают последовательно во вре­
мени на единственный вход устройства и по завершении операции по­
следовательно символ за символом выводятся из него. На рис. 1,а по­
казано выполнение операции инверсии над четырехразрядным вход­
ным словом JCyfcXtXf) = 1 0 0 1 , при которой биты выходного слова
Y}Y2YiYo= 0110 принимают противоположные значения. Эту опера­
цию реализует логический элемент, называемый инвертором;
=> параллельное выполнение операции, при котором символы кодового слова
поступают одновременно на входы устройства и по завершении операции
одновременно выводятся из него. На рис. 1,6 показано выполнение той же
операции над четырехразрядным входным словом
Для парал­
лельной обработки входных слов необходимо располагать устройством,
имеющим в общем случае М входов и N выходов.
В ряде случаев используется комбинированный способ обработки
цифровой информации. Например, при передаче цифровой информации
по двухпроводной линии от внешнего устройства в микропроцессор вы ­
полняется преобразование цифровых данных из последовательного в па­
раллельный код, а при передаче от микропроцессора к внешнему устрой­
ству — из параллельного кода в последовательный.
т
i
Цифровое
устройство
ПО
1 1
Хз
1 0
' *2
I
х,
1 ^0
X(t) | 1
>0
ПО !
0
0 1 0 С >
! г2 \ Уз
1 1 1 1 0
t
1 0
1
Р ~
' *0
Уз
0
у2
1
Цифровое
устройство
,
Уо
1
0
t
а)
б)
Рис. 1. Способы обработки кодовых слов с последовательным (а) и параллельнь
вводом/выводом (б)
Основные типы цифровых устройств. По принципу действия, вы­
полняемым функциям и схемным особенностям выделяют два типа циф­
ровых устройств: комбинационные и последовательностные устройства.
Приведем краткое описание особенностей каждого типа устройств.
К о м б и н а ц и о н н ы е у с т р о й с т в а . Устройствам комбина­
ционного типа присущи следующие свойства и особенности:
любой выходной сигнал однозначно определяется совокупностью
значений, или комбинацией, входных сигналов в данный момент вре­
мени, т.е. не зависит от предшествующих комбинаций входных сиг­
налов и последовательности их поступления на вход устройства;
=> в схемах комбинационных устройств о тс у тс т в у ю т обратные связи,
поэтому они не имеют информации о своем внутреннем состоянии и
не обладают памятью;
=> для описания комбинационных устройств используются логические
функции, в которые не входит время',
=> для построения логической схемы комбинационного устройства необ­
ходимо располагать его описанием (структурной формулой).
Последовательностные
у с т р о й с т в а . Для уст­
ройств последовательностного типа характерны следующие признаки:
=> выходной сигнал зависит не только от значений входных сигналов в
данный момент времени, но и от предшествующих значений сигналов
и последовательности их поступления на вход устройства (например,
счетчик импульсов). Одной и той же комбинации входного сигнала
могут соответствовать различные выходные сигналы (например, в
триггере комбинации 0 0 режима хранения может соответствовать вы­
ходной сигнал 0 или 1 );
=> в схемах последовательностных устройств используются обратные
связи, поэтому они имеют информацию о своем внутреннем состоя­
нии и состоянии выхода и обладают памятью',
=> при описании последовательностных устройств используется время',
=> схемы последовательностных устройств можно построить, не прибе­
гая к их аналитическому описанию.
О сновные функции цифровых устройств. На комбинационные у с т ­
ройства возлагаются основные функции по обработке информации циф­
ровой системой. С их помощью выполняются все логические и арифме­
тические операции, операции контроля и диагностики функционирования
цифровых систем, операции шифрации и дешифрации, формирования и
преобразования логических функций, разделения потока цифровой ин­
формации по отдельным каналам и объединения потоков информации
отдельных каналов в один поток и многие другие.
Главной функцией последовательностных устройств является функ­
ция хранения двоичной информации, или функция памяти. Как уж е ука­
зывалось выше, функция памяти лежит в основе принципа функциониро­
вания всех цифровых систем. Помимо хранения результатов преобразо­
вания последовательностные устройства выполняют ряд функций, свя­
занных с преобразованием информации. К ним относятся функции счета
импульсов, сдвига отдельных битов кодового слова, преобразования па­
раллельного кода в последовательный и последовательного в параллель­
ный и др.
13. КОМБИНАЦИОННЫЕ УСТРОЙСТВА
13.1. Общие сведения о комбинационных
устройствах
Представление и некоторые способы описания устройств. Комбинаци­
онное устройство можно представить в виде многополюсника (рис. 1), с М
входными зажимами, на которые подаются сигналы Хт (т = 0,.... М - 1), и N
выходными зажимами, с которых снимаются сигналы Y„ (п = 0, ..., /V - 1 ) .
Особенность как входных Хт, так и выходных Y„ сигналов проявляется в том,
что они могут принимать только два значения. Обычно низкому уровню
сигнала придают значение 0, а высокому — 1. Так как в комбинационных
устройствах выходные сигналы Y„ однозначно определяются совокупностью
(комбинацией) входных сигналов Хт, действующих на некотором временном
интервале, то в общем случае связь между выходными и входными сигнала­
ми может быть задана в виде функций
(1)
Y„ = F„(XM^\,.... Хт, ..., Х0), где п = О,
Такие функции называются логическими
Хо
(переключательными или булевыми) и
изучаются в разделе математики, именуе­
Комбинационное
Хт
мом алгеброй логики или булевой алгеб­
устройство
рой, основы которой были заложены анг­
Хи
лийским математиком Дж. Булем в сере­
дине XIX века. Система функций (1) явля­
ется аналитическим описанием комбина­ Рис. 1. Представление комби­
национного устройства
ционных устройств.
в виде многополюсника
Другим широко распространенным
способом описания комбинационных устройств являются таблицы ис­
тинности, в которых комбинации входных сигналов Хм_и .... ^ от> .... Х0
целесообразно отождествлять с M-разрядными двоичными числами.
К р а т к и е с в е д е н и я о позиционной системе счисления. Из­
вестно, что любое целое положительное М-разрядное число (X)h с ос­
нованием h в позиционной системе счисления можно представить в
следую щ ем виде:
(2)
(X)h = (Хм~\
Хт ... Хо)/, = X M~vhM '+•■•
м-\
...+ X m-hm+ -+ X 0-h° = ^ X mhm ,
т =0
где Хт — одна из цифр 0, 1, 2 ,..., h - 1 позиционной системы, соответст­
вующая значению /w-го разряда числа (X)h. При вычислении суммы осно­
вание h и его показатель степени т записываются в десятичной системе
счисления.
Пример
1. В десятичной системе счисления используется д е­
сять цифр: 0, 1 ,2 , 3, 4, 5, 6 , 7, 8 , 9; основанием является комбинация
д вух цифр: 10. Запись выражения (2) для десятичного числа 5768 име­
ет вид
CY),o = (5768) ю = 5* 10 3 + 7-1 0 2 + 6 -1 0 1 + 8 -1 0 °.
П р и м е р 2. В двоичной системе используются две цифры 0, 1 и
основание 2. Ниже приведена запись 5-разрядного двоичного числа:
(3)
(Х)2 = (10 110) 2 = 1 -2 4 + 0 -2 3 + 1 -2 2 + 1 -2 1 + 0 -2 ° =
= 16 + 0 + 4 + 2 + 0 = (22)ю.
Т аблица истинности. Таблица содержит:
=> один столбец для занесения номеров i наборов (комбинаций) входных
сигналов в десятичных числах, начиная с 0 ;
=> Мстолбцов для записи значений входных сигналов Х'и^ ,...,Х ‘т ,...,Х'0 ,
которые будем отождествлять с двоичными числами (Х'м_1...Х‘т ...Х‘0)2 и
располагать в строках таблицы в возрастающем порядке. Двоичное
М -разрядное число м ож ет принимать 2м различных значений, так
как путем комбинации 0 и 1 в записи ( 2 ), (3) оно «пробегает» все
значения от 0 (ко гда все Хт= 0) до 2м - 1 (когда все Х т= 1). Напри­
мер, для М = 2 двоичные числа принимают следую щ ие 4 значения:
00, 01, 10, 11. Из тождественности значений входны х сигналов
Х'м_\,...,Х'т ,...,Х'0 для г-го набора и М-разрядного двоичного числа
( Х ‘м^...Х'т ...ЛС0)2 сл едует, что максимальное число возможных раз­
личных наборов /тах = / = 2м. Каждому i-му набору входных сигна­
лов соответствует, согласно ( 1 ), определенное значение выходного
сигнала Y„ на п-и вы ходе комбинационного устройства;
=> N столбцов для записи значений выходных сигналов Уд,.,,..., ,..., У0'
(порядок записи может быть любым).
Ниже приведена структура таблицы истинности для М = 2 (табл. 1).
О пределение м акси м ал ь н о го числа вы х о д о в ком би н ац и он н ы х
ус т р о й с т в . Бинарность значений (0 и 1) входных и выходных сигна­
лов и однозначность описания ( 1 ) комбинационных устройств позво­
ляю т принципиально оценить их функциональные и структурные
возможности. П окажем, что при заданном числе М входов комбина­
ционное устройство имеет ограниченное число Nmax выходов и, следо­
вательно, способно сформировать определенную совокупность вы ­
хо дн ы х сигналов ( 1 ).
Таблица 1
i
Вх. сигналы
Хо
Го
г,
I*
Г|5
0
0
0
0
0
0
1
1
0
1
0
0
1
1
2
1
0
0
0
1
1
3
1
1
0
1
0
1
Выходные сигналы
Воспользовавшись табл. 1 , рассмотрим комбинационное устройство с
двум я входами (М = 2), для которого входные сигналы Х\, Х0 имеют 4
комбинации значений: 0 ,0 ; 0, 1; 1 ,0 и 1,1. Возможно, что для всех 4
комбинаций входных сигналов выходной сигнал (Уо) принимает значе­
ние, равное 0. Другой возможный вариант, когда для трех комбинаций
входных сигналов X, = 0, Х0 = 0; Х х= 0, Х0 = 1; X, = 1, Х0 = 0 выходной
сигнал (У)) равен 0 и только при комбинации Х\ = \, Х0 = 1 принимает
значение 1. И, наконец, возможен случай, когда выходной сигнал (7is)
при всех 4 комбинациях входных сигналов равен 1. Число возможных
вариантов равно 2 4 = 16, так как число (возможных комбинаций входных
сигналов), или наборов, 1= 2м = 2 2 = 4 .
Т аким образом, в общем случае максимальное число вы ходов ком ­
бинационных устройств определяется максимальны м числом I набо­
ров входны х сигналов как 2 7, а максимальное число наборов — чис­
лом М входов устройства как / = 2 м. С ледовательно, максимальное
число вы ходов комбинационных устройств определяется следующей
формулой:
Следовательно, любое комбинационное устройство способно
сформировать конечное число логических функций, что обусловлено
двум я значениями цифровых сигналов (0 и 1) и конечным числом М
входов. Казалось бы, любые потребности в комбинационных устрой­
ствах можно удовлетворить путем создания интегральных схем уст­
ройств с различным числом входов М и максимальным числом вы хо­
дов Nmax. Однако весьм а быстрое увеличение Nmax (4) с ростом М
( M n a x = 4 при М = 1; Nmm= 16 при М = 2; Nmax= 256 при М = 3;
Armax= 65 536 при М = 4; Nmm= 4 294 967 296 при М = 5) не позволяет
практически реализовать такой набор интегральных схем комбинаци­
онных устройств.
О ф ункциональных возможностях комбинационных устройств.
Комбинационное устройство можно рассматривать как устройство, вы­
полняющее некоторую логическую операцию над входными сигналами
Хм-и .... Хт,
Х0, в результате которой на его я-м выходе формируется
выходной сигнал в виде логической функции Y„ = F„ (AVi, ■■■>Хт,
Хц).
Рассматривая табл. 1 с этой точки зрения, нетрудно убедиться в том, что:
=> функцию Y\ можно получить в результате операции умножения вход­
ных переменных Х\ и Х0. Поэтому операция называется логическим
умножением или конъюнкцией;
=> функцию Уб можно рассматривать как логическую операцию неравно­
значности, при выполнении которой вырабатывается выходной сигнал
логической единицы (У6 = 1)> если X |^ Х0, в противном случае Yb = 0.
Каждая логическая функция Y„ (« = 0 ,—,15) представляет собой четы­
рехразрядное двоичное число (соответствующее индексу и), является ре­
зультатом выполнения некоторой операции над входными переменными
Х\, Х0 для г'-го набора и имеет свое название и запись. Комбинационное
устройство с двум я входами формируют полный набор логических опера­
ций, который представлен в табл. 2. Каждая из логических операций Y„
имеет свое название и обозначение. Многие из операций справедливы для
любого конечного числа М входных переменных.
Отметим, что многие логические операции (функции) имеют несколь­
ко названий. Например, логическая операция неравнозначности для Y6
имеет названия «исключающее ИЛИ», «сложение по модулю 2». Важную
роль, которую играет табл. 2 , можно объяснить тем, что если существует
какая-либо логическая операция, то она должна выполняться, по крайней
мере, для двух переменных. В виду важной роли табл. 2 мы будем к ней
обращаться по мере необходимости.
Таблица 2
Запись операции (функ­
ции)
Обозначение
Название операции (функции)
Y0
0
К,
Ы
Постоянный 0
Умножение, конъюнкция, И
у2
Х\ —>Xq - X] • Xq
Запрет по Х0
Тождественность Хх
к,
Хх
X() —->.Y] = X j Xq
г<
X0
Тождественность Х0
Уб
X\®Xo= Xi X qv X]-X q
Неравнозначность
Yi
X,vX0
Сложение, дизъюнкция, ИЛИ
Ys
XliX 0= X l v X 0
Стрелка Пирса, ИЛИ-НЕ
y9
X]~Xq= XyXgv X ]X 0
Равнозначность
Yi о
I 'm
*0
Xq—
^X]=X\v X 0
Запрет по Х\
Инверсия Х0, НЕ
Импликация от Х0 к Х\
Инверсия Х\, НЕ
Y\2
Yu
Xi~>Xo= X t vXn
Yu
X,/X0= X ,X 0
Штрих Шеффера, И-НЕ
r,s
1
Постоянная 1
Импликация от Х\ к Х0
13.2. Основные логические операции и их реализация
П остановка вопроса. Для конкретизации аналитического описания комби­
национных устройств, представленного в параграфе 13.1 системой логиче­
ских функций в общем виде ( 1), необходимо ввести набор операций, с по­
мощью которых можно было бы выразить любые логические функции, т.е.
набор операций, удовлетворяющий условию функциональной полноты.
В алгебре логики такой набор включает в себя три основные логические
операции: отрицание, или инверсию (inversion — перевертывание), сложе­
ние, или дизъюнкцию (disjunction — разъединение, разобщение), и умноже­
ние, или конъюнкцию (conjunction — соединение, связь).
Кавдая из перечисленных логических операций реализуется с помощью
своего логического элемента. Ниже в качестве примеров рассматриваются
схемы логических элементов, построенных на биполярных транзисторах. Для
большей наглядности транзисторы представлены управляемыми ключами, а
для индикации выполненной операции в схемы введены лампочки.
Логическое отрицание. Логическим отрицанием независимой пере­
менной X называется операция, в результате которой образуется функция
Y, принимающая значение, противоположное значению X. В качестве X
может фигурировать любая логическая функция. Логический элемент, с
помощью которого реализуется логическое отрицание, называется эле­
ментом НЕ, или инвертором. В таблице истинности для логического эле­
мента НЕ (табл. 1) приведены значения логической функции Y (выходной
переменной), полученные в результате выполнения операции логическо­
го отрицания над входной переменной X. На рис. 1,а приведено условно­
графическое обозначение инвертора, а на рис. 1 ,6 — пример его схемной
реализации. Принцип работы:
=> при Х = 0 транзистор заперт и на выходе инвертора формируется высокий
уровень напряжения, соответствующий логическому уровню У= 1 ;
=> при Х = 1 транзистор открыт и на выходе инвертора формируется уро­
вень логического нуля (Y = 0).
_
Логическое отрицание записывается в виде функции У = Х , которая
читается «не X».
Таблица 1
/
0
1
Вход Выход
X
Y
1
0
0
1
В
У=Х
а)
б)
в)
г)
Рис. 1. Условное графическое обозначение инвертора (а),
схема инвертора (б), его состояния при входных сигналах
Х = 0(в )и Х = 1 (г)
Логическое сложение. Логическим сложением М независимых пере­
менных Хт ( т = 0 ,..., М -1) называется операция, в результате которой
получается логическая сум м а в виде логической функции Y указанных
независимых переменных, которая равна 1 , если хотя бы одна из незави­
симых переменных Х„ (или Х0, или Х\, ..., или Хм~\) равна 1, и равна 0,
если все Хт равны 0.
В таблице истинности (табл. 2) приведены значения логической
функции Y для 4 наборов входных переменных Х\, X,о. Логическое
сложение обозначается символами «V », «+ ». Для записи операции
(функции) будем использовать первый символ: Y = Х\ v Х0. Запись
ч итается: «или Х\, или Х0», что на язы ке алгебры логики означает:
событие Y истинно (У = 1 ), если истинно (т.е. равно 1 ) хотя бы одно из
событий Х[ или Ха.
Элемент, с помощью которого реализуется логическое сложение, на­
зывается логическим элементом ИЛИ, а также дизъюнктором. Его гра­
фическое обозначение приведено на рис. 2,а. Пример схемной реализа­
ции логического элемента ИЛИ на биполярных транзисторах для М = 2
приведен на рис. 2,6. Если хотя бы один из ключей замкнут, то Y = 1
(рис. 2,в). Для этого один из входных сигналов или Х\, или X,, должен
быть равен единице. И только при обоих разомкнутых клю­
чах (Xi=X0 = 0) выходной сигнал Y = 1 (рис. 2,г).
i
0
1
2
3
Входы
Таблица 2
Выход
Xi
Хо
Г
0
0
0
1
0
1
0
1
1
£l
яь
1
X,
J
+£
Яо
J
+Е
1
Х\ = 1 \ Хо = О р X = о
1
1 , Т
1
У= 1
+Е
яь = о _я
Л
1
Y=0
>
Y=X\WХо
б)
в)
г)
а)
Рис. 2. Условное графическое обозначение
логического элемента ИЛИ (а), его схемная реализация (6)
и возможные состояния Y = 1 (в) и Y = 0 (г)
Логическое умножение. Логическим умножением М независимых
переменных Хт (т = 0 ,..., М - 1) называется операция, в результате кото­
рой образуется логическое произведение в виде логической функции Y
указанных независимых переменных, которая равна 1 , если все перемен­
ные Хт (и Х0, и X h ..., и Хм~\) равны 1; Y равна 0, если хотя бы одна из
переменных Хт равна 0.
В таблице истинности (табл. 3) приведены значения логической
функции Y для случая М= 2. Операция логического умножения обозна­
чается символами «•», « л » , «& ». Для записи логического произведения
(функции) наиболее часто будем использовать первый символ (точку) и
даж е опускать его. Логическое произведение двух переменных записыва­
ется в виде: Y - Х\Х{). Запись читается: «и Х и и Ао», что на язы ке булевой
алгебры означает: событие Y истинно (Y = 1), если истинно (т.е. равно 1)
и Х ъ и Х 0.
i
0
1
2
3
Таблица 3
Выход
Входы
Х\
А'о
Y
0
0
1
1
0
1
0
1
Х_
&
+Е
+Е
0
1
1
1
X, = 0
Х, = 1 (<
Хв = 1
■*0=1 ,<
’У =
0
/т\
У=Х,Х0
Хо
г)
а)
Рис. 3. Условное графическое обозначение логического элемента И (а),
его схемная реализация (б) и возможные состояния Y = 0 (в) и Y = 1 (г)
Элемент, с помощью которого реализуется логическое умножение,
называется логическим элементом И, или конъюнктором. Его графиче­
ское обозначение приведено на рис. Ъ,а. Пример схемной реализации ло­
гического элемента И на биполярных транзисторах для М = 2 приведен
на рис. 3,6. В схеме конъюнктора (рис. 3,в) выходной сигнал 7 = 0 , если
один из последовательно соединенных транзисторных ключей разомкнут.
Для этого необходимо, чтобы хотя бы один из входных сигналов Х\, Х0
был равен нулю. И только при Х\= X q= 1 сигнал Y= 1, так как все ключи
находятся в замкнутом состоянии (рис. 3,г).
Отметим, что логические операции можно описать с помощью вре­
менных диаграмм (рис. 4). Такой способ описания используется при ком­
пьютерном моделировании цифровых устройств.
НЕ
ИЛИ
И
Рис. 4. Описание работы логических элементов НЕ, ИЛИ, И с помощью
временных диаграмм
Основные логические операции НЕ, ИЛИ, И позволяют аналитически
описать, а логические элементы НЕ, ИЛИ, И — реализовать комбинаци­
онное устройство любой степени сложности. Поэтому перейдем к изло­
жению принципов составления выражений для описания схем комбина­
ционных устройств.
13.3. Структурные формулы
П редставление стр уктур н ы х формул. Структурными формулами бу­
дем называть логические функции, полученные тем или иным способом
для аналитического описания конкретных комбинационных устройств.
Структурные формулы однозначно определяют структуру логической
схемы комбинационного устройства. Рассмотрим способ получения
структурных формул на основании таблицы истинности. При этом спо­
собе в структурных формулах выходной сигнал Y„ (и = 0, 1, ..., N - 1) на
любом из выходов комбинационного устройства может быть выражен
через входные сигналы ХМ-\,..., Хт , ..., Х0 с помощью рассмотренных вы­
ше основных логических операций в двух алгебраических формах:
=> в совершенной дизъюнктивной нормальной форме (СДНФ). С трук­
турная формула в СДНФ представляет собой логическую сум м у, чле­
нами которой являются логические произведения всех входных сиг­
налов в прямой или инверсной форме;
=> в совершенной конъюнктивной нормальной форме (СКНФ). С трук­
турная формула в СКНФ представляет собой логическое произведе­
ние, членами которого являются логические суммы всех входных сиг­
налов в прямой или инверсной форме.
Для наглядности проиллюстрируем способ получения структурных
формул в СДНФ на примере комбинационного устройства с двум я вхо­
дами (М = 2) и одним выходом (N = 1), описание которого приведено в
табл. 1 .
Таблица 1
i
Хо
Y=Y‘
m,
т 0‘
™П
Г
|1
ш2'
т 3'
0
0
0
0
1
0
0
0
1
0
1
1
0
1
0
0
2
1
0
1
х х 0
0
0
1
0
3
1
1
0
х ,х 0
0
0
0
1
Верхний индекс «г» в обозначениях величин отражает номер набора,
которому соответствует значение этой величины.
Для перехода от табличного описания комбинационного устройства к ал­
гебраическому описанию в СДНФ каждому г'-му набору входных переменных
ставится в соответствие минтерм ш„ который представляет собой логическое
произведение всех входных переменных. При этом переменная входит в мин­
терм в прямом виде, если ее значение для /-го набора равно 1, и — в инверс­
ном виде, если значение входной переменной равно 0. В табл. 1 приведены
выражения минтермов ш, и значение каждого из них (т о , т / , т 2‘, тз') как ло­
гической функции для /-го набора входных переменных.
Из табл. 1 следует важное свойство минтермов: минтерм nV = 1
(к = 0 , 1 , 2 , 3) только для одного набора входных переменных, номер ко­
торого / совпадает с его индексом к (i = к). Это свойство позволяет пред­
ставить выходной сигнал Y комбинационного устройства в виде суммы
минтермов, относящихся к единичным наборам. Для рассматриваемого
примера выходной сигнал Y ' = 1 для наборов /= 1 и / = 2 , поэтому:
(1)
Y = mi v m 2 = Х хХ0 v Х\ Х 0 .
Для общего случая структурная формула в СДНФ может быть записа­
на в виде
(2)
У =Х Г Ч ,
/=0
где Y ‘ — значение функции Y на i-м наборе; I = 2м — число возможных
наборов; М — число входов комбинационного устройства.
Отметим, что в (2) входят также произведения тех наборов, для кото­
рых значения Y ' = 0. Эти произведения равны нулю, не влияют на ре­
зультат и включены для общности записи.
Практически при составлении структурной формулы в СДНФ по таб­
лице истинности поступают так:
=> записывают логическую сумму, каждое слагаемое которой представляет
собой логическое произведение всех входных переменных, а их число
равно числу единичных наборов таблицы истинности, на которых Y= 1 ;
над каждым слагаемым-произведением ставят номер единичного набора;
=> над теми независимыми переменными каждого слагаемогопроизведения, значения которых в рассматриваемом единичном набо­
ре равны 0 , ставят знак инверсии.
Проиллюстрируем рекомендуемый порядок для записи функции Y,
значения которой приведены в табл. 1 :
1
Y= X ,X 0vX0X0 .
2
Над слагаемыми проставлены номера единичных наборов, к которым
они отнесены, а под независимыми переменными — их значения на рас­
сматриваемом наборе.
Для представления структурной формулы в совершенной конъюнк­
тивной нормальной форме (СКНФ) каждому /-му набору переменных
Хм-1,
Хт, ..., Х{) ставится в соответствие макстерм М,-, представляющий
собой логическую сумму всех переменных, причем, если в наборе Хт - О,
то переменная входит в сумму в прямом виде, а если Хт = 1, то — в ин­
версном. Логическая функция выражается в виде произведения (конъ­
юнкции) макстермов:
(3)
Г = П (У Ч М ,. ).
/=о
Справедливость представления (3) вытекает из свойства макстермов:
макстерм М* = 0 только на одном наборе, номер i которого совпадает с
индексом макстерма к {к = 0, 1 , .. ., / - 1), т.е. i = к. Для рассматриваемого
примера структурная формула в СКНФ имеет вид
Y = М 0 М3 = ( Х ^ Х 0М Х ^ Х 0).
13.4. Минимизация логических функций
О необходимости м инимизации с т р у к т у р н ы х ф орм ул. С труктурны е
формулы в виде логических функций в СДНФ и СКНФ однозначно
определяю т структуру логической схемы комбинационного устройст­
ва. Однако нельзя быть уверенным в том, что построенное по стр ук­
турной формуле устройство будет наиболее полно удовлетворять за­
данным требованиям. Если рассматривать тож дество алгебры логики
для д вух логических функций, то в общем случае количество опера­
ций в правой части тождества не равно числу операций в левой части.
Так как для реализации каждой операции необходим логический эле­
мент, то следует отдать предпочтение комбинационному устройству,
структурная формула которого имеет меньшее число операций. По­
этом у путем тождественных преобразований структурной формулы,
приводящих только к изменению ее формы, а не значений, можно уп ­
ростить схем у комбинационного устройства. Преобразование стр ук­
турной формулы с целью упрощения комбинационного устройства
назы вается ее минимизацией. В качестве критерия сложности стр ук­
турной формулы можно такж е использовать число входящ их в нее
первичных термов (Хт или X т ).
А л геб р аи ч еск ая м иним изация. Метод алгебраической минимиза­
ции структурных формул комбинационных устройств, представленных
логическими функциями в совершенной дизъюнктивной и конъюнктив­
ной нормальных формах, состоит в использовании аксиом, законов и
тождеств алгебры логики. Ниже приведены краткие сведения об основ­
ных положениях алгебры логики. В приведенных соотношениях симво­
лы А, В, С являю тся как логическими переменными, так и логическими
функциями.
В алгебре логики определены три рассмотренные вы ш е основ­
ные логические операции (отрицание, сложение и ум н о ж ен и е) и
отношение эквивалентности ( = ), удовлетворяю щ ее следую щ им
сво й ствам :
=> рефлексивности (А = А);
=> симметричности (если А = В, то В = А);
=> транзитивности (если А = В, В = С, то А = С).
(1)
(2 )
(3)
(4)
(5)
А к с и о м ы
а л ге б р ы
логики
А = 0, если Л Ф 1 и А = 1, если Л Ф0.
lv A = l , 0- A=0\
0 v A = A, 1 ■А = Л;
A v A = А , А - А =А;
A v 1 = 1, А -А = 0;
(6 )
А =А.
Аксиома (1) отражает тот уж е известный факт, что алгебра логики
оперирует только с двоичными переменными. Аксиомы (2)^(6) являются,
по сути, дела более общей формой представления рассмотренных выше
правил логического сложения, умножения и отрицания двоичных пере­
менных.
Основные законы алгебры логики
Коммутативный (переместительный) закон
(7)
A v B = B v A , A - B = B- A.
Ассоциативный (сочетательный) закон
(8 )
(A v В) v С = A v (В v С), (Л • В) • С = А • (В • С).
Дистрибутивный (распределительный) закон
(9)
А ■(В v О = А ■В v А ■С, A v (В ■Q = (A v В) ■(A v С).
Закон двойственности (теорема де Моргана)
(10)
A v В = А В,
T
b
= A v B.
Другие
соотношения
Правило поглощения
(11) A v А ■В = А, А ■ (A v В ) = А.
Правило склеивания
(12)
А ■B v А - В
=A ,(A vB )(A vB )=A .
Соотношения (7)+(12) можно доказать с помощью аксиом ( 1)+ ( 6 ) пу­
тем перебора всех значений переменных. Приведенные аксиомы, законы
и соотношения, за исключением ( 6 ), записаны парами. Каждое из входя­
щих в пару выражений может быть получено из другого заменой опера­
ций сложения на умножение, 0 на 1 и наоборот. Если в логическое выра­
жение входят операции сложения и умножения, то следует соблюдать
порядок выполнения операций: сначала выполняется умножение, за­
тем — сложение. В сложных логических выражениях для задания поряд­
ка выполнения операций используются скобки.
В выражениях (2)+(5), (11), (12) правая часть проще левой, поэтому
путем преобразований логических функций по правилам алгебры логики
можно добиться существенного упрощения исходного выражения.
Процедуру минимизации логических функций можно в какой-то мере
формализовать, если воспользоваться их представлением в виде карт мин­
термов (макстермов), из которых широкое распространение получили карты
Карно. С помощью карт Карно, могут быть получены так называемые мини­
мальные дизъюнктивные и конъюнктивные нормальные формы структур­
ных формул, содержащих минимальное число первичных термов. В основе
метода минимизации лежит п р а в и л о с к л е и в а н и я .
Структура карт Карно. Карта Карно для логических функций
Y = F ( X M_ ]
Х 0) М переменных имеет форму прямоугольника
(квадрата), который содержит 2м пронумерованных клеток. Номер клетки
составляется из А/-разрядного двоичного числа, при этом старшими раз­
рядами нумеруются строки, младшими — столбцы.
Структуры карт Карно для числа переменных (аргументов) логических
функций М = 2, 3, 4, 5 приведены на рис. 1. По периметру карт толстыми ли­
ниями с обозначениями Хтвыделены столбцы и строки, двоичные номера кле­
ток которых имеют значение указанного разряда Х т= 1 (т - 0 , . . М - 1). На­
пример, для карты с М = 4 во втором и третьем столбцах, выделенных толстой
линией с обозначением Хп, младшие разряды Х 0 номеров клеток Х^Х2Х Х п в
двоичной системе счисления равны 1 (0001 - 1 ,0 1 0 1 - 5 , 1101 - 13, 1001 - 9 —
для второго столбца, ООП—3, 0111 —7, 1111 —15, 1101 —11 — для третьего
столбца).
М= 3
М= 2
Х2 Х Л
*0
0
1
X,
00
01
11
10
3
2
7
6
0 0
1
0
1
1 2
3
4
5
А-0
Хо
М-5
М= 4
ад
ХзХ2 Х Х о
00
01
11
10
00
0
1
3
2
01
4
5
7
6
и
12
13
15
14
10
8
9
11
10
х2
х4
X,
Хо
\х2
Х2Х,Х0
х2
0
1
3
2
6
7
5
4
8
9
11
10
14
15
13
12
24 25
27
26
30
31
29
28
16
19
18
22
23
21
20
Хз
17
Хо
Хо
Рис. 1. Структура карт Карно
Представление логических функций с помощью карт Карно. Кар­
ту Карно для логической функции М независимых переменных можно
отождествить с таблицей истинности для этой же функции. Каждой клет­
ке карты Карно соответствует строка таблицы истинности. Поэтому, если
для г'-го набора переменных Х м~\,..., Хт, Х {) значение функции Y = Y ‘ = 1,
то в клетку с номером i заносится 1, если же Y = Y ’ = 0, то в клетку карты
заносится 0 или клетка остается пустой. Клетки, заполненные единицами,
будем называть единичными клетками, а клетки, заполненные нулями,
или пустые клетки — нулевыми клетками. Отметим, что номер клетки
карты должен соответствовать номеру строки таблицы истинности или
номеру i набора независимых переменных логической функции. Поэтому
при нумерации клеток код X M-\.-.X„,..Xq используется как обычное двоич­
ное число.
На основании карты Карно (точно так же, как и таблицы истинности)
можно осуществить алгебраическую запись логической функции в со­
вершенной дизъюнктивной (СДНФ) или конъюнктивной (СКН Ф ) нор­
мальной форме. Если каждой клетке карты Карно сопоставить минтерм и
просуммировать все минтермы для клеток карты, заполненных единица­
ми, то получим СДНФ записи логической функции. Если же каждой
клетке сопоставить макстерм и взять логическое произведение всех
макстермов для нулевых клеток, то получим СКНФ логической функции.
Обычно клеткам карт Карно сопоставляются минтермы.
П ринцип
минимизации логических функций с помощью карт
Карно. Для всех карт Карно, приведенных на рис. 1, номера в двоичной
системе счисления двух соседних клеток, расположенных в одном столб­
це или строке, включая две противоположные крайние клетки, отличают­
ся лишь цифрой в одном разряде. Поэтому минтермы двух соседних кле­
ток являются склеивающимися минтермами и их логическая сумма на
основании правила склеивания ( 1 2 ) вырождается в контерм первого по­
рядка, представляющий собой один конъюнктивный член с меньшим на
единицу числом первичных термов, чем исходные минтермы. Например,
для М = 5 минтермы 9-й (01001) и 25-й (11001) клеток карты Карно
(рис. 1 ) имеют вид
ш9 =
, ш 25 = Х 4 Х 3 Х 2 Х , Х 0.
Их логическая сумма равна
ш 9 + ш25 - Х 4Х 3Х 2Х , Х 0 + Х , Х 3Х 2Х , Х 0 =
= (Х
4 + Х , ) Х гХ 2 Х , Х 0
= 1•Х 3 Х 2 Х {Х 0.
Поэтому, если 9-я и 25-я клетки карты Карно заполнены единицами,
то, объединяя («склеивая») их, можно получить один конъюнктивный
член с меньшим на единицу числом первичных термов (переменных).
Необходимо иметь в виду, что для М > 5 склеивающиеся клетки могут
располагаться в разных местах карты и не быть соседними (по располо­
жению). Например, для М = 5 склеивающиеся клетки (рис. 1) располага­
ются симметрично относительно вертикальных и горизонтальных осей,
разделяющих столбцы и строки карты с номерами 001 и 0 1 1 , 0 1 0 и 1 1 0 ,
111 и 101. В частности, склеивающимися клетками являются клетки 8
( 1 0 0 0 ) и 1 0 ( 1 0 1 0 ) расположенные симметрично относительно вертикаль­
ной оси, разделяющей столбцы 001 и 011. Поэтому, строго говоря, сосед­
ними следует называть такие клетки, номера которых в двоичном счис­
лении отличаются лишь цифрой в одном разряде. Для выявления сосед­
них клеток допускается карту Карно свернуть в цилиндр путем объеди­
нения внешних вертикальных или горизонтальных сторон карты (прямо­
угольника или квадрата).
Таким образом, в основе графической минимизации логических функ­
ций леж ит свойство карт Карно, обусловленное особенностями нумера­
ции клеток.
Основны е этапы минимизации. Процедура минимизации выполня­
ется в два этапа.
1. Р а з м е т к а к а р т ы К а р н о . Разметка заключается в выде­
лении групп единичных клеток, представляющих собой контерм, или
конъюнктивный член с меньшим числом первичных термов, чем у минтерма. Группу могут составлять 2, 4, 8 , 16 клеток. Объединенные в груп­
пу клетки обводят на карте Карно тонкой линией. Объединению подле­
жат только те заполненные единицами клетки, которые подчинены пра­
вилу склеивания. К ним относятся:
=> две соседние клетки;
=> клетки, составляющие полные столбцы или строки из 2, 4 и 8 клеток;
=> клетки, составляющие полные квадраты из 4 и 16 клеток;
=> две группы клеток, расположенные симметрично относительно цен­
тральных вертикальных или горизонтальных осей карты и осей, раз­
деляющих столбцы и строки карты с номерами 001 и Oi l , 111 и 101
(для М = 5 и 6 ).
К аж дая группа должна охватывать по возможности большее чис­
ло клеток и не должна входить в состав другой группы. Одна и та
ж е клетка может входить в состав нескольких групп, но может и не
войти ни в одно из объединений. Необходимо стремиться к тому,
чтобы общее число выделенных групп было минимальным. Разметку
целесообразно начинать с выделения групп, содержащих наибольшее
число клеток.
2. С ч и т ы в а н и е
с
карты
Карно.
Процесс получения ал­
гебраического выражения логической функции на основании размеченной
карты Карно, т.е. переход от графического представления логической функ­
ции к алгебраическому описанию, называется считыванием. Каждая группа
клеток считывается в виде произведения переменных в прямой или инверс­
ной форме, или контермов. В произведение входят только те переменные,
которые являются общими для всех минтермов объединенных клеток. Необъединенные (единичные) клетки считываются в виде соответствующих
минтермов. Логическая сумма контермов и минтермов дает минимальную
дизъюнктивную нормальную форму (МДНФ) исходной логической функции.
Правила считывания приведены ниже.
Рассмотрим некоторые характерные случаи минимизации.
М иним изация полностью определенных логических функций. Ес­
ли исходная логическая функция Y определена для всех возможных на­
боров логических переменных, т.е. все значения Y ' (г = 0, ..., I - 1) из­
*3*2
вестны, то она называется полностью
Х>Хо
00
1 1
щ
\
1 J-
01
11
10
3
определенной. На рис. 2 приведена запол­
11
01
00
ненная карта Карно для М = 4.
При разметке карты выделены следую­
щие области (группы) клеток:
!
га
/
/
[71
/
1 '
"*2
Хо
Рис. 2. Размеченная карта Карно
=> 1 — квадрат из четырех клеток;
= > 2 — две соседние клетки, располо­
женные на противоположных концах
столбца;
= > 3 — единичная клетка.
При считывании необходимо установить (с помощью выделенных зон
или путем перебора), какие входные переменные в прямой или инверсной
форме входят в выбранную область клеток. На рис. 3 такие переменные
(и соответствующие им разряды) выделены.
На основании рис. 3 можно сформулировать простое п р а в и л о
с ч и т ы в а н и я : выбираются те переменные, для которых значение
разряда в номере клетки сохраняет постоянное значение во всей выде­
ленной области, при этом если значение равно 1 , то переменная входит в
контерм в прямой форме, если равно 0, то — в инверсной форме. Эти
значения, полученные путем перебора, приведены в табл. 1, где прочерк
( - ) свидетельствует о том, что переменная входит в группу, как в прямом,
так и в инверсном виде.
Область из 2 клеток
Область из 4 клеток
Номера клеток
Минтермы
Номера клеток
Минтермы
0
0
0
1
%
Ж
Ж
Хо
0
0
1
1
%
Х2
X,
Хо
0
1
0
1
X
Х2
X
Хо
0
1
1
1
х3
Хг
X
Х0
*3
х2 X,
*0
*3
Х2
Хо
Рис. 3. Принцип считывания с карты Карно
Таблица
№ группы
*3
Х2
Хх
Х0
Контерм
1
0
-
-
1
2
-
0
1
0
Х 2Х , Х 0
3
1
1
0
0
х 3х 2х , х 0
Например, в группе 1 переменные Х 3 = О, Х 0 = 1, а остальные пере­
менные принимают значения и 0, и 1. Следовательно, группа 1 формиру­
ет конъюнктивный член Х 3 Х 0. Просуммировав контермы (конъюнктив­
ные члены) всех групп, получим минимизированное выражение для ис­
ходной логической функции
Y = Х 3 Х 0 v Х 2 Х , Х д v Х 3Х 2 Х , Х 0.
Для облегчения считывания по периметру карт Карно (рис. 1) обозна­
чены зоны (в виде одного или нескольких столбцов или строк), в которых
та или иная переменная Хо, ..., Х м_\ равна 1. Для остальной части карты
значение переменной равно 0. Как указывалось выше, для карты Карно из
16 клеток ( М = 4) зоной, в которой Х 0 — 1, являются второй и третий
столбцы. Для всех клеток первого и четвертого столбца карты Хо = 0.
М инимизация не полностью определенных логических функций.
Имеется широкий класс логических функций, значения Y = Y которых
определены только на части наборов (г = 0,..., М — \) переменных. Такие
логические функции называются не полностью или частично определен­
ными. Наборы, на которых логическая функ­
Х}Х2
ад
оо
ция определена, называются рабочими набо­
01
и
oolil
01
рами, а на которых не определена— безраз­
1
личными наборами. На практике безразличные
ф
наборы соответствуют наборам входных сиг­
ф
налов, которые в комбинационном устройстве
АГз
никогда не реализуются. Значение функции Y ,
соответствующее безразличному набору, обо­
ф
Хз (0--
-)
Хо
а д (-о-о)
Y=XiV Х А
Рис. 4. Минимизация
частично определенной
логической функции
с помощью карты Карно
значают в таблице истинности или на карте
Карно символом Ф, так как ее значение может
быть задано 0 или 1. Обычно частично опреде­
ленную функцию доопределяют таким обра­
зом, чтобы получить наиболее простую мини­
мальную дизъюнктивную нормальную форму.
Для этого при разметке карт Карно в группу
включают те клетки, отмеченные символом Ф, которые расширяют объе­
динения и уменьшают их число. Пример минимизации частично опреде­
ленной логической функции приведен на рис. 4.
М иним изация совокупности логических функций. Такая задача
возникает при структурном синтезе комбинационного устройства со мно­
гими
выходами,
позволяющего
реализовать
логические
функции
У о , Y „ , ..., Yn- i , число которых равно числу N выходов устройства. Осо­
бенности минимизации для этого случая состоят в следующем:
=> число карт Карно равно числу выходов, так как каждая из функций Y„
минимизируется с помощью своей карты;
=> при разметке стремятся к тому, чтобы выделить одинаковые области
на возможно большем числе карт. Каждая такая область при считыва­
нии представляется контермом и реализуется как логический элемент,
который «обслуживает» выходы, относящиеся к этим картам.
Минимизированные логические функции записывают в виде
(13)
Yn= W n v ^ Z „
k,
к
где Z*„ — общие из членов Z 1, ..., Z *,..., Z* для функции Y„.
Представление минимизированных логических функций в виде
(13) значительно упрощает схемное решение, так как общие члены
Z 1, ..., Z*, ...,z K реализуются один раз для всего комбинационного уст­
ройства.
П о л у ч е н и е миним альной конъю нктивной н о р м аль н ой формы
( М К Н Ф ) логических функций. Возможны два подхода к решению
этой задачи. Первый из них учитывает то обстоятельство, что пустые
клетки карты Карно соответствуют макстермам, логическое произве­
дение которых дает совершенную конъюнктивную нормальную форму
(С К Н Ф ) записи исходной функции Y. Поэтому, объединяя пустые
клетки карты Карно по изложенным выше правилам, можно найти
М КН Ф функции Y. Второй подход состоит в том, что вместо исходной
функции Y минимизируется инверсная функция Y по изложенной вы­
ше методике. В результате получают минимизированную дизъюнк­
тивную нормальную форму (М Д Н Ф ) инверсной функции. После этого
с помощью формул двойственности (де Моргана) осуществляется пе­
реход к функции Y.
О
применении
метода
графической
минимизации
логических
функций. Для графической минимизации логических функций приме­
няются также карты Вейча, отличающиеся от карт Карно лишь порядком
нумерации клеток.
Метод минимизации с помощью карт Карно прост в реализации руч­
ным способом при небольшом числе переменных Х тлогических функций
( М < 6 ). Однако он теряет свою привлекательность при большом числе
переменных по следующим причинам:
=> клетки карты Карно, двоичные номера которых отличаются лишь
цифрой в одном разряде, могут не быть соседними на карте, а распо­
лагаться вдали друг от друга. Это создает трудности при разметке
карты, так как выделяемый контерм, представляющий собой совокуп­
ность клеток с одинаковыми цифрами двоичных номеров, может со­
стоять из нескольких автономных групп клеток;
=> при разметке карты могут быть получены различные варианты набо­
ров контермов, что свидетельствует о неоднозначности результата
минимизации логических функций;
=> карты Карно нельзя использовать непосредственно для компьютерной
минимизации логических функций.
Указанных недостатков лишены методы Квайна, Мак-Класки, Петри­
ка [29]. Отметим, что метод минимизации с помощью карт Карно широко
используется в дальнейшем для пояснения принципов построения схем
различных комбинационных устройств.
1 3.5. Л о ги ч е с к и е и э л е м е н т н ы е б ази сы
Понятие базиса. Набор логических операций, позволяющий аналитически
описать любую логическую функцию, называется функционально полным
набором или логическим базисом. Такой набор составляют основные логиче­
ские операции ИЛИ, И, НЕ, поэтому он является одним из логических бази­
сов. Логический базис называется минимальным, если удаление из набора
хотя бы одной операции превращает этот набор в функционально неполный.
Логический базис НЕ, ИЛИ, И не является минимальным, так как на основа­
нии законов двойственности можно исключить из логических выражений
операцию ИЛИ либо И. Следовательно, логический базис ИЛИ, И, НЕ явля­
ется избыточным базисом. Минимальный базис составляют две операции
НЕ, ИЛИ и НЕ, И. Практического внимания заслуживают минимальные ба­
зисы, представляющие собой только одну операцию. К ним относятся опе­
рации логического умножения с отрицанием (И— НЕ, штрих Шеффера) и
логического сложения с отрицанием (ИЛИ— НЕ, стрелка Пирса), описание
которых приведено в табл. 1 (п. 1 .2 ), а условные графические обозначения
логических элементов И— НЕ, И Л И — НЕ изображены на рис. 1,а. Для под­
тверждения функциональной полноты каждой из операций И— НЕ, ИЛИ—
НЕ на рис. 1,6,в,г показана реализация основных логических операций НЕ,
И, ИЛИ с помощью логических элементов И — НЕ и И Л И — НЕ (нижний
ряд обозначений в круглых скобках).
Рис. 1. Условные графические обозначения элементов
И—НЕ и ИЛИ— НЕ (а) и реализация с их помощью логических
операций алгебры — логики (б, в, г)
Набор логических элементов, обладающий функциональной полно­
той, является элементным базисом. Логические элементы И — Н Е либо
И Л И — Н Е составляют минимальный элементный базис и находят широ­
кое применение при реализации различных комбинационных устройств.
Однако применение только минимального элементного базиса может
привести к усложнению устройства и ухудшению его характеристик. По­
этому часто используют расширенные или избыточные элементные бази­
сы, в которые кроме элементов И — Н Е , И Л И — Н Е входят элементы И —
И Л И — Н Е , исключающее И Л И и др.
Запись логических функций в реализуемых базисах. Базис из ос­
новных логических операций И, ИЛИ, НЕ, в котором проводится мини­
мизация логических функций, не является оптимальным с точки зрения
схемной реализации комбинационных устройств. Для этих целей часто
используют другие базисы. Поэтому структурные формулы комбинаци­
онных устройств должны быть представлены в базисе, который выбран
для их реализации. Рассмотрим правила записи логических функций в
наиболее распространенных базисах.
Правила
записи
в базисе
И — НЕ: минимизирован­
ная в базисе И, ИЛИ, НЕ логическая функция У представляется в виде
логической суммы произведений Р к входных переменных (минимальная
дизъюнктивная нормальная форма), после чего используется формула
закона двойственности:
к
к
При записи могут оказаться полезными следующие соотношения:
А = А - 1,
а
-в +
а
А = А-А,
-в =
а
А-В^А-А-В,
-1Гв - 7~в
в
.
П р а в и л а з а п и с и в б а з и с е И Л И - H E : минимизиро­
ванная в базисе И, ИЛИ, НЕ логическая функция Y представляется в виде
логического произведения сумм Sk входных переменных (М КН Ф ), затем
используется формула закона двойственности:
к
к
При записи могут быть полезными следующие соотношения:
А —А
0, А —А
А , А + В —А + А + В ,
(А + В ) - ( А + В ) = А + А + В + А + В + В .
П р а в и л а з а п и с и в б а з и с е И - И Л И - Н Е : в базисе И,
ИЛИ, НЕ минимизируется инверсное значение исходной логической
функции Y, результат минимизации представляется в виде логической
суммы произведений Р к входных переменных (минимальная конъюнк­
тивная нормальная форма), после чего путем инверсии обеих частей по­
лученного выражения осуществляется переход в требуемый базис:
У = ^ Р к,
к
к
При записи могут быть полезными следующие соотношения:
1 И = А - В + С - 0,
А -В = А - 1 И ,
где С — любая логическая функция.
1 3 .6 . И н т е гр а л ь н ы е л о ги ч е с к и е э л е м е н ты
Общие сведения. Логические элементы в интегральном исполнении иг­
рают важную роль при проектировании и разработке любых цифровых
устройств. Поэтому, прежде чем приступить к изучению конкретных ти­
пов цифровых устройств, целесообразно рассмотреть вопросы схемотех­
нической реализации, принципы работы, основные характеристики и па­
раметры некоторых типов интегральных логических элементов (ИЛЭ).
По способу представления двоичной информации различают:
=> п о т е н ц и а л ь н ы е
ИЛЭ, в которых логические переменные 0 и 1
представляются двумя различными уровнями потенциала. В зависимости
от закрепленных за логическими переменными уровней различают поло-
жительную и отрицательную логику. Переход от положительной логики
к отрицательной равносилен инверсии всех логических переменных логиче­
ской функции и самой функции, что в силу законов дуальности соответст­
вует замене операции ИЛИ на операцию И и наоборот:
А + В = А-В,
А-В = А + В .
В связи с этим в дальнейшем используется положительная логика,
для которой логическому «О» соответствует низкий потенциал U°, а
логической «1 » — высокий потенциал С/ 1 независимо от полярности
источника напряжения питания;
=> и м п у л ь с н ы е
ИЛЭ, в которых изменение и фиксация логиче­
ских уровней происходит в определенные промежутки времени. На­
личие импульса положительной полярности или его положительный
перепад {фронт) соответствует логической « 1», а отсутствие импуль­
са или его отрицательный перепад {срез) — логическому 0 (положи­
тельная логика).
Большинство типов логических элементов, используемых в современ­
ных цифровых микросхемах, относится к классу потенциальных. Рас­
смотрим два широко распространенных типа потенциальных ИЛЭ: эле­
менты транзисторно-транзисторной логики (Т Т Л ) и элементы на ком­
плементарных М О П структурах (КМ ОПТЛ).
Элементы Т Т Л . ТТЛ-элементы явились логическим развитием ди­
одно-диодной логики путем замены диодной сборки многоэмиттерным
транзистором. Рассмотрим простейший ТТЛ-элемент, содержащий двухэмиттерный транзистор VTM и инвертор на транзисторе VT (рис. 1,а). Для
доступности изложения принципов работы ТТЛ-элемента каждый р -п переход многоэмиттерного транзистора заменим на полупроводниковый
диод (рис. 1,6 ).
+Е
' Л
*
уты
+Е
_
' - / [5
У=ХХ0о
2
Х\ VDX vd
N
VT
, И
Ао
1
а)
___
г=х,х„
Л !
;'б=0
«2
б)
VDo
У-VTb
VT
1
Ь
Ж VLh
в)
Рис. 1. ТТЛ-элемент (а) и его диодный аналог (б ); схема цепей (в), подключен­
ных к точке 1 на рис. 1 ,6 , и их вольт-амперные характеристики (г )
Принцип
работы
логического
э л е м е н т а . Пусть
Х\ = 1 (вход свободный), Х {) = 0 (рис. 1,6). Цепь, подключенная к точке 1
для этого случая, изображена на рис. \,в, а вольт-амперные характери­
стики для ее левой и правой ветвей — на рис. 1,г. Через диод VD 0 проте­
кает входной ток /вх, и напряжение в точке 1 равно прямому напряжению
U на диоде (рис. \,в). Входной ток определяется по вольт-амперной ха­
рактеристике диода VD (I (рис. 1,г). Его значение при и = U равно /вх = /.
Базовый ток г'б транзистора VT определяется по результирующей вольтамперной характеристике последовательной цепи, составленной из диода
перехода база — эмиттер транзистора УТ5ъ (рис. \,в). Результи­
рующую характеристику можно построить, задаваясь различными значе­
VD 2
и
ниями г = const и принимая u = 2U\ (рис. 1,г). Значение базового тока оп­
ределяется положением точки А на результирующей вольт-амперной ха­
рактеристике и практически равно нулю (4 = 0). Поэтому коллекторный
ток через транзистор VT не протекает, и напряжение на его коллекторе
равно +Е, что соответствует сигналу Y = 1 на выходе логического эле­
мента. При двух других комбинациях входных сигналов Х\ = 0, Хц = 1 и
Х\ = Х 0 = 0 логический элемент сохраняет свое состояние.
Пусть Х\ = Х 0 = 1, т.е. на оба входа логического элемента подано по­
ложительное напряжение или оба входа свободны (изолированы). В этом
случае ток I протекает через диод VD 2 и переход база — эмиттер транзи­
стора VT, отпирая его. Потенциал коллектора транзистора понизится при
насыщении до значения, близкого к нулю, что соответствует Y = 0 на вы­
ходе логического элемента.
Таким образом, логический элемент выполняет логическую операцию
И— НЕ.
Для повышения помехоустойчивости, нагрузочной способности и
быстродействия в интегральных схемах логических элементов транзисторно-транзисторной логики используют сложный инвертор. Один из
базовых вариантов схемы логического элемента со сложным инверто­
ром изображен на рис. 2,а. Инвертор содержит фазорасщепляющий
каскад на транзисторе VT\ и двухтактный каскад по схеме ОК— ОЭ на
транзисторах VT2, VT 3. Переход база — эмиттер транзистора VT X вы­
полняет функцию дополнительного источника смещения, увеличивая
порог переключения логического элемента (V T 3), что повышает его
помехоустойчивость. Резистор Л 4 служит для ограничения тока (вы­
полняет защитные функции) при возможном коротком замыкании вы­
хода логического элемента и в моменты переключения логического
элемента, когда оба выходных транзистора VT2, VT^ могут быть от­
крыты. Диод V D предназначен для надежного запирания транзистора
VT 2 (в состоянии логического нуля).
Рис. 2. Базовый вариант схемы логического элемента со сложным инвертором (я );
расширитель (б), подключаемый к выводам 1, 2 для элемента на рис. 3; графиче­
ское обозначение логического элемента 2И— И Л И — НЕ (в)
Если Х\ = Х й = 0; Х\ = 0, Х 0 = 1 или Х\ = \ , Х 0 = 0, то через переходы ба­
за — эмиттер транзисторов VT\, VTj ток не протекает и они закрыты.
Транзистор VT2 открыт, и после заряда нагрузочной (паразитной) емкости
С по цепи + Е —> Т?4 -¥ V T 2 —>VD —» С на выходе логического элемента
устанавливается сигнал Y = 1.
При подаче сигналов Х\ = Х 0 — 1 через коллекторный переход VTM
и базовые переходы VTh VT3 начинает протекать ток. Транзистор VT]
отпирается, напряжение на его коллекторе понижается, благодаря че­
му VT2 запирается. Однако в отсутствие диода V D транзистор VT 2 мо­
жет остаться в открытом состоянии. Поэтому для более надежного
запирания VT 2 в схему введен диод VD. Поясним необходимость этой
меры. Параллельно переходам коллектор — база и база — эмиттер
открытого транзистора VT\ подключены такие же переходы база —
эмиттер транзистора VT 2 и коллектор — база транзистора VT 3. Так как
через переход база — эмиттер транзистора VT\ протекает ток, то и
через переход база — эмиттер транзистора VT 2 может протекать ток,
поддерживая его в открытом состоянии. Включение диода VD, выпол­
няющего функции источника напряжения смещения, в эмиттерную
цепь транзистора VT 2 обеспечивает его надежное запирание. После
запирания транзистора VT 2 нагрузочная емкость С разряжается через
транзистор К7з, открытое состояние которого поддерживается проте­
кающим базовым током и входным током следующего логического
элемента. На выходе фиксируется сигнал Y = 0.
Таким образом, логический элемент реализует операцию И— НЕ.
Логический элемент способен работать на емкостную нагрузку с
большими скоростями переключений. Это обусловлено тем, что за­
ряд/разряд емкости С происходит через открытые транзисторы VT2, VT3,
обеспечивающие большие токи. Известно, что скорость изменения на­
пряжения на конденсаторе dllldt = НС.
О
расширении
функций
логических
эле­
ментов.
В
некоторых
логических
элементах
транзисторно­
транзисторной логики (рис. 2 ,а ) предусмотрены выводы 1, 2 для подклю­
чения расширителя (рис. 2,6). При подключении расширителя логический
элемент реализует операцию 2И— ИЛИ— НЕ (рис. 2,в), в результате ко­
торой на выходе формируется сигнал Y - X 1 - X
2 + X i-X0 .
При этом:
=> операции логического умножения (2И) выполняют два многоэмиттерных транзистора VTM и VTM\\
=> операция логического сложения (ИЛИ) обеспечивается благодаря па­
раллельному включению транзисторов VTt и VT4;
=> операцию отрицания (НЕ) реализует выходной инвертор на транзи­
сторах VTU VT4, VT2, VT} .
Логические элементы на комплементарных М ОП-транзисторах.
Инвертор.
Простейшим логическим элементом комплементарной
МОП (КМ О П ) транзисторной логики является инвертор (рис. 3,а), реали­
зующий операцию отрицания (НЕ).
При низком уровне входного напряжения ( i f = 0) переключающий
и-канальный транзистор VT заперт (напряжение затвор-исток равно 0), а
нагрузочный /^-канальный транзистор VTH открыт (напряжение затвористок равно —Е ). Поэтому напряжение на выходе инвертора имеет высо­
кий уровень (С/ 1 = 1), близкий к Е.
При высоком уровне входного напряжения (t / 1 = 1), равном +Е,
«-канальный транзистор VT открыт, p-канальный транзистор VT„ заперт,
и выходное напряжение инвертора имеет низкий уровень ( i f = 0 ), рав­
ный практически нулю.
Таким образом, важнейшей особенностью КМОП транзисторной ло­
гики является то, что в обоих состояниях инвертора практически отсут­
ствует потребление мощности благодаря весьма малому току закрытых
транзисторов. Близкое к нулю выходное напряжение инвертора позволя­
ет снизить напряжение питания Е примерно до 2 U mc, где U 0TC — напря­
жение отсечки транзистора. В связи с тем, что заряд выходной емкости
инвертора происходит через открытый нагрузочный транзистор, рабо­
тающий в режиме насыщения, повышается быстродействие. Указанные
факторы определяют достоинства элементов КМОП транзисторной логи­
ки по сравнению с элементами на однотипных МОП-транзисторах.
Рис.
3. Логические элементы Н Е (а), И Л И — Н Е (б ) и И — Н Е (в)
на КМОП-транзисторах.
Логические
элементы
И Л И — НЕ
и
И — НЕ.
На
рис. 3,6 приведена типовая схема двухвходового логического элемента
И ЛИ — НЕ, на рис. 3,в — элемента И— НЕ. Построение типовых схем
базируется на следующем принципе:
=> транзисторы одного типа соединяются параллельно, другого типа —
последовательно;
=> соединенные затворы комплементарных пар образуют входы логиче­
ского элемента, а соединенные стоки обеих групп — его выход.
Выполняемая логическая операция определяется видом соединения
транзисторов нижней группы. Изменение полярности питающего напря­
жения или типа транзисторов в группах (в конкретной схеме логического
элемента) равносильно переходу от положительной логики к отрицатель­
ной. При этом, как уже упоминалось выше, изменяется выполняемая
элементом функция ИЛИ— НЕ на И— НЕ и наоборот.
Основны е характеристики и параметры логических элементов.
Для оценки свойств различных логических элементов служат статические
и динамические параметры.
Статические
параметры
определяются по статическим
характеристикам. Наиболее важной из них является передаточная ха­
рактеристика, представляющая собой зависимость напряжения на выхо­
де логического элемента при изменении напряжения на одном из его
входов и при постоянстве на других на уровне логического 0 или 1. Такая
характеристика позволяет определить минимальный уровень напряжения
логической 1 , максимальный уровень напряжения логического 0 , порого­
вые уровни входных напряжений поддержания логических 1 и 0 , мини­
мальный уровень напряжения логического перепада, ширину зоны неоп­
ределенности и ряд других параметров [29].
Входная и выходная характеристики позволяют определить парамет­
ры логического элемента как нагрузки и источника сигналов (входное и
выходное сопротивления, коэффициент объединения по входу, коэффи­
циент разветвления на выходе и др.).
Динамические
параметры
характеризуют время за­
держки при прохождении сигналов через элемент или их быстродейст­
вие. Для оценки быстродействия часто пользуются средним временем
задержки.
1 3 .7 . С т р у к т у р н ы й с и н т е з к о м б и н а ц и о н н ы х
устройств
Постановка задачи. На основе правил работы комбинационного уст­
ройства необходимо построить структурную (логическую) схему ми­
нимальной сложности из логических элементов заданного базиса.
Структурная схема представляет собой графическое изображение тре­
буемых логических элементов и необходимых соединений между их
входами и выходами. Степень сложности схемы оценивается по кри­
терию. Таким критерием может служить, например, общее число тре­
буемых логических элементов (операций). При этом каждому типу
логических элементов могут быть приписаны свои весовые коэффици­
енты. Весьма часто степень сложности оценивается суммарным чис­
лом входов логического элемента.
При проведении синтеза необходимо учитывать, что:
=> каждый логический элемент имеет ограниченное число входов, поэто­
му входящие в структурные формулы комбинационных устройств ло­
гические суммы и произведения должны содержать определенное
число входных переменных;
=> каждый логический элемент обладает ограниченной нагрузочной спо­
собностью, т.е. к его выходу может быть подключено ограниченное
число входов;
=> конечное время распространения сигналов в логических элементах
может привести к возникновению так называемых опасных состяза­
ний, при которых нарушается требуемая последовательность пере­
ключений элементов и, следовательно, нормальное функционирова­
ние комбинационного устройства.
Порядок проведения синтеза. 1. Ф о р м а л и з а ц и я
правил
р а б о т ы к о м б и н а ц и о н н о г о у с т р о й с т в а . На основании об­
щих требований к цифровому устройству составляются условия функ­
ционирования комбинационного устройства в виде таблицы истинности,
структурных формул или совокупности номеров единичных (нулевых)
наборов входных сигналов.
2. М и н и м и з а ц и я с т р у к т у р н ы х
ф о р м у л . В зависи­
мости от конкретных условий при проведении этого этапа используется
алгебраический или графический метод минимизации.
3. З а п и с ь
минимизированных
структурных
формул
в з а д а н н о м б а з и с е . В интегральных схемах ком­
бинационных устройств широко используются базисы И— НЕ, ИЛИ—
НЕ, И— ИЛИ— НЕ. Поэтому часто возникает необходимость записи мини­
мизированных структурных формул в одном из этих базисов.
4. С о с т а в л е н и е
структурной
с х е м ы . На основании
структурной формулы каждой логической операции ставится в соответ­
ствие логический элемент выбранного базиса и осуществляются необхо­
димые связи между элементами.
Дальнейшее изложение посвящено рассмотрению принципов по­
строения, функционирования и особенностей типовых комбинационных
устройств.
1 3 .8 . Д е ш и ф р а т о р ы
Общие сведения. Д е ш и ф р а т о р о м (Decoder — D C ) M x N назы­
вают комбинационное устройство с М входами и N выходами, преобра­
зующее M-разрядный двоичный код в /^-разрядный унитарный код.
В дешифраторах высокого уровня унитарный код содержит единствен­
ную 1, в дешифраторах низкого уровня —
единственный 0. Максимальное число вы­
ходов N = 2м соответствует всем возмож­
ным наборам сигналов на входе дешифра­
тора или М-разрядным двоичным кодам.
Дешифратор с максимальным числом N
= 2 м выходов называется полным ( М х 2 м), а
с числом выходов N < 2 М — неполным. На
рис. 1 приведено графическое обозначение
дешифратора
высокого
уровня
(выходы
Рис. 1. Графическое обозна­
чение полного дешифратора
высокого уровня
дешифратора низкого уровня помечаются кружочками, как у инвертора).
В левом дополнительном поле указаны веса входных сигналов Х т, рав­
ные 2 т (т = О, 1 , 2 , ..., М - 1), а в правом — номера выходов, совпадаю­
щие с индексами выходных сигналов.
П олные дешифраторы и их свойства. Рассмотрим простейший де­
шифратор 2 x 4 высокого уровня, описание которого задано табл. 1 .
Таблица 1
Выходы
Входы
1
0
Х\
Хо
Уз
У2
у,
0
0
0
0
0
1
Уо
1
0
1
0
0
1
0
2
1
0
0
1
0
0
3
1
1
1
0
0
0
Пользуясь табл. 1, запишем структурные формулы для дешифратора
2 х 4 в совершенной дизъюнктивной нормальной форме:
( 1)
у0 = а д , ri = а д , y 2 = а д , г 3 = а д .
Выражения (1) соответствуют схеме дешифратора, составленной из
логических элементов НЕ и И (рис. 2,а). Если над правыми частями
выражений ( 1 ) поставить два знака инверсии, то полученные соотно­
шения позволяют построить схему дешифратора в базисе И— НЕ (рис.
2 ,6 ).
Для построения дешифратора в базисе ИЛИ— НЕ преобразуем (1) к
виду
(2)
Уо = * , + * 0 . Yi = X t + X
0 ,Y2= X , + X 0 ,Y3
= J, + X 0 .
Схема дешифратора в базисе ИЛИ— НЕ изображена на рис. 2,в. Со­
поставление схем на рис. 2 показывает, что в базисе И— НЕ структура
дешифратора получается более сложной.
Как следует из табл. 1 и выражений (1), для каждой комбинации
(/ = 0 , 1 ,2 ,3 ) входных сигналов дешифратор формирует минтерм двух
переменных т,-2. Полный дешифратор формирует 4 минтерма. Следова­
тельно, при М > 2 полный дешифратор высокого уровня выполняет
функцию формирования 2м минтермов М переменных, и его структур­
ную формулу можно записать в виде
(3)
У,- = т ш , /= 0, 1,2, ... , N — 1,
где М — число входов; N — число выходов дешифратора; N = 2м.
Напомним, что минтерм тш представляет собой логическое произве­
дение М входных переменных Х т (т = О, 1, 2, ..., А/-1), причем перемен­
ная Х т входит в минтерм в прямом виде, если ее значение на г-м наборе
равно 1 , и в инверсном виде, если значение переменной равно 0 .
На основании (3) может быть построена схема дешифратора при лю ­
бом числе (М ) информационных входов.
Если в схеме на рис. 2,а элементы И заменить на И— НЕ, а в схеме на
рис. 2,5 исключить выходные инверторы, то получим схемы полных де­
шифраторов 2 x 4 низкого уровня. Дешифраторы низкого уровня форми­
руют макстермы М ш , представляющие собой логическую сумму М
входных переменных Х т ( т - 0, 1,2, . . . , М - 1), причем переменная Х т
входит в макстерм в прямом виде, если ее значение на г-м наборе равно 0 ,
и в инверсном виде, если значение переменной равно 1 .
а)
б)
в)
Рис. 2. С хем ы дешифратора 2 x 4 высокого уровня, составленной из логических
элементов НЕ и И (а), И -Н Е (б ), И Л И -H E (в)
П о л н ы е дешифраторы с разреш аю щ ими входами. Для повышения
разрядности входного кода дешифраторов во многих микросхемах пре­
дусматривается вход разрешения работы Е {Enable — разрешение).
Рассмотрим принцип построения управляемых дешифраторов на приме­
ре дешифратора 2 x 4 высокого уровня, правила функционирования которого
приведены в табл. 2, где Ф = 0 или 1. Из табл. 2 следует, что при управляю­
щем сигнале Е = 1 дешифратор находится в активном состоянии и выполня­
ет свои функции, при Е = 0 на всех выходах дешифратора устанавливаются
уровни логического 0 независимо от значений входных сигналов Х\, Х 0.
На основании табл. 2 составим структурные формулы дешифратора в
совершенной дизъюнктивной нормальной форме (СДНФ):
(4)
У9 = Е X , Х 0 , Y, = Е Х хХ й, Г2 = Е Х {Х 0 , У3 = Е Х хХ й.
Из структурных формул (1), (4) следует, что для управления де­
шифратором необходимо в схеме дешифратора на рис.
2 ,а
использо­
вать трехвходовые элементы И, подавая на третий вход всех элемен­
тов сигнал Е.
Таблица 2
Выходы
Входы
Е
0
1
0
*0
Уз
у2
У
0
0
0
0
1
0
Го
0
1
0
0
1
1
0
0
1
0
О
1
1
1
0
0
0
ф
ф
0
0
0
О
Способы повышения разрядности дешифраторов. Дешифрато­
ры, построенные по структурной формуле ( 1 ), называют одноступен­
чатыми или параллельными. Они обладают наиболее высоким быст­
родействием, однако для повышения разрядности необходимо увели­
чивать число входов элементов логического умножения. Д ля устране­
ния этого недостатка используют два способа повышения разрядности
дешифраторов [29]:
=> способ логического перемножения (сложения) выходных сигналов
двух дешифраторов;
=> способ каскадирования дешифраторов, снабженных вх.одами разре­
шения.
Рассмотрим в качестве примера способ каскадирования дешифра­
торов 2 х 4 с одним входом разрешения. В этом случае для перевода
дешифраторов в активное состояние следует использовать дополни­
тельный дешифратор 2 x 4 . Вариант схемы дешифратора 4 х 16 с ис­
пользованием
дополнительного
управляющего
дешифратора 2 x 4
( D C - Z ) изображен на рис. 3. Дешифратор D C -Z всегда находится в
активном состоянии. Если значения старших разрядов входного кода
Х ъ = 0, Х 2 = 0, в активном состоянии находится дешифратор D C - 0, так
как на его разрешающий вход поступает сигнал £, = Z0= 0. При ком­
бинации сигналов Х ъ= 0, Х 2 = 1 активизируется дешифратор D C - 1, так
как на его разрешающий вход поступает сигнал Е = Z\ = 0. Сигналом
Z 2 = 0 при комбинации Х 3 = 1 , ^ = 0 разрешается работа дешифратору
D C - 2. Дешифратор D C -3 работает при комбинации входных сигналов
Х ъ = 1, Х 2 = 1 управляющего дешифратора D C -Z .
Рис. 3. Схема дешифратора 4 х 16 с использованием дополнительного управ­
ляющего дешифратора 2 x 4 (D C -Z )
1 3.9 . Ш и ф р а то р ы
Общие сведения о шифраторах. Ш и ф р а т о р о м
(Coders — C D )
M x N называют комбинационное устройство с М входами и N выходами,
преобразующее М-разрядный унитарный код в /^-разрядный двоичный
код. Шифратор по отношению к дешифратору выполняет обратную
функцию. Шифраторы классифицируют по ряду признаков.
По ч и с л у в х о д о в различают:
=> полные шифраторы, число входов которых М = 2‘v;
=> неполные шифраторы, имеющие число входов М < 2 Ы.
По у р о в н я м
входных
и выходных
выделяют:
сигналов
=> шифраторы высокого уровня, активные сигналы на входах и выходах
которых имеют уровень логической единицы;
=> шифраторы низкого уровня, активные входные и выходные сигналы
которых соответствуют уровню логического нуля.
По ф у н к ц и о н а л ь н о й
значимости
раторы разделяют на две группы:
входов
шиф­
=> шифраторы с равнозначными функциями входов, в которых все входы
равноценны и при подаче на любой из них активного уровня сигнала
на выходе формируется двоичный код. В таких шифраторах нельзя
подавать несколько входных сигналов одновременно от разных ис­
точников, т.е. должна соблюдаться очередность подачи сигналов от
разных источников. Если на один из входов шифратора подан сигнал,
остальные входы шифратора должны быть заблокированы;
=> приоритетные шифраторы, в которых возможна одновременная по­
дача на входы сигналов от разных источников, однако только один из
них, имеющий больший приоритет, выполнит функцию формирова­
ния выходного кода. Как правило, наивысший приоритет назначается
входу с самым высоким порядковым номером.
Условное графическое обозначение шифратора высокого и низкого
уровней показано на рис. \,а,б.
0
1
CD
у,
У2
N-
М -1
1
J) 0
1j j
J>2
•• •
•
•
•
•
•
•
Х м -1
*0
х,
*2
у0
0
Уц- 1
CD
J
*0
Xi
X?
0 (
] (
Уо
2 (
У2
Л М (I3
Уц
У,
•
•
•
*Л # -1
J )М - 1
а)
б)
Рис. 1. Условное графическое обозначение шифратора вы сокого(я)
и низкого(б) уровней
Принципы построения шифраторов. Проиллюстрируем принципы
построения шифраторов на примере шифратора высокого уровня 4 x 2 ,
описание которого приведено в табл. 1 .
Таблица 1
Выходы
Входы
i
1
*3
*2
0
0
*0
У\
Ко
0
1
0
0
0
1
0
0
1
2
0
4
0
1
0
0
1
0
8
1
0
0
0
1
1
Особенность шифраторов проявляется в том, что в них используются не
все возможные наборы входных переменных. Для шифратора 4 x 2 использу­
ются лишь 1-й, 2-й, 4-й и 8 -й наборы. Поэтому, воспользовавшись табл. 1 и
картами Карно (рис. 2) для комбинационного устройства с четырьмя входами,
выполним минимизацию Y\ , Y0 как не полностью определенных функций.
В результате минимизации получаем структурные формулы, которые по зако­
ну двойственности можно представить в базисе И— НЕ:
(1) У, =X 3vX 2= Х 3Х 2 , Y0 = X 3 v X { = Х ъХ х .
Схема шифратора, построенного по структурным формулам (1), при­
ведена на рис. 3.
Yx
ХгХг
X,
XiXo
Уо
X,
X jX 2
___ Х\
Х ,Х 0
00
01
11
10
00
01
11
10
00
ф
0
ф
0
ф
0
ф
1
01
1
ф ф ф
—
11
ф ф ф\ ф
10
ф ф \ф
Хз
Хо
Хз
Хг
ф
ф
ф\
ф ф ф
\ф
у ф ф V
0
Х2
Х2
Х2
Хо
Х2
Рис. 2. Карты Карно для шифратора 2x4
Рис. 3. Схема шифратора
2x4 на элементах И -Н Е
Приоритетные шифраторы. Для шифратора (табл. 1) выполняет­
ся условие X fX j = 0 при i Фj , где /, j принадлежат т = 0 , 1, 2 , ..., М - 1 .
Если сигналы Х т поступают от независимых источников, то приве­
денное условие невыполнимо. В этом случае каждому входу назнача­
ется свой приоритет. Обычно входу с более высоким номером соот­
ветствует более высокий приоритет. Приоритетный шифратор выдает
требуемый код, если Л*, = 1, а на входах с более высокими номерами
Xj = 0 (/' > г); состояния входов с более низкими номерами являются
безразличными^— Ф (J < /).
Таблица 2 задает правила функционирования приоритетного шифра­
тора высокого уровня 4 x 2 . Высший приоритет имеет вход Х$.
___
Таблица 2
Входы
/
Выходы
*3
Хг
Х\
1
0
0
0
2
0
0
4
0
8
1
Хо
К,
Уо
1
0
0
1
Ф
0
1
1
ф
Ф
1
0
ф
ф
Ф
1
1
Для составления структурных формул приоритетных шифраторов
можно использовать карты Карно. Однако более простым является
способ представления структурных формул в совершенной дизъюнк­
тивной нормальной форме (С Д Н Ф ) с последующей минимизацией.
Используя табл. 2, представим логические функции Y\ и Y0 в СНДФ
как сумму минтермов для единичных наборов. При этом будем игно­
рировать переменные Х т = Ф, так как они не должны влиять на фор­
мирование выходных сигналов. Для упрощения формул будем исполь­
зовать следующее тождество:
(2)
А + АВ = А + В ,
справедливость которого легко доказывается методом перебора: при А = 0
имеем 0 v 1-В = 0 v В; при А = 1 получаем 1 v 0 В = 1 v В. Следовательно,
тождество (2) выполняется для любых значений А и В.
С учетом указанных условий получаем следующие выражения для
выходных сигналов приоритетного шифратора:
(3)
Г, = Х зv Х 3 Х 2 = X 3v * 2= Ж Ж ; Уо =
Х 3Х 2 Х { =
X 3v X 2 X , = X 3 X 2 X l .
На основании (3 ) строим схемы приоритетного шифратора 4 x 2
(рис. 4). Вопросы каскадирования приоритетных шифраторов изложе­
ны в [29].
Го
Xi
Хъ
1&___ г - п&
У0
--- --------Х2
а)
Г &
6)
Рис. 4. Схемы приоритетного шифратора 4x2
1 3 .1 0 . Д е м у л ь т и п л е к с о р ы
Назначение демультиплексоров. Д е м у л ь т и п л е к с о р о м
(D e­
multiplexer— D M X ) из 1 в yV (1 —> /У) называют комбинационное устрой­
ство с одним информационным (X ), К адресными (А 0, ..., А/,,
А К-\)
входами и N
выходами (Y(j,...,Y„,...,YN-\), осуществляющее передачу
входного сигнала на один из выходов, задаваемый адресным кодом. Чис­
ло выходов связано с числом адресных входов следующим соотношени­
ем: N = 2К. Условное графическое обозначение демультиплексора пока­
зано на рис. 1,а. Демультиплексор представляет собой цифровой комму­
татор, который позволяет разделить входной поток цифровой информа­
ции n & N - 2 K выходных потоков.
X
—
—
•
•
X
DMX
Yo
•
•
•
•
•
Ак~\
Уц-t
м
Yo
№
а)
б)
Рис. 1. Условное графическое изображение демультиплексора (а); схема демуль­
типлексора 1 —» 4 (б) и его представление в виде коммутатора (в)
С войства и принципы построения демультиплексоров. Для выяв­
ления свойств и принципов построения демультиплексоров рассмотрим
демультиплексор 1 —> 4 ( К = 2 , N = 4 ) , правила функционирования кото­
рого заданы таблицей истинности (табл. 1).
___________________________
i
Входы
Таблица 1
Выходы
А1
Ао
у3
у2
Ух
Yn
0
0
0
0
0
0
X
1
0
1
0
0
X
0
2
1
0
0
X
0
0
3
1
1
X
0
0
0
С помощью табл. 1 запишем выражения для выходных сигналов в со­
вершенной дизъюнктивной нормальной форме (С Д Н Ф ):
(1 )
Y() = Х - А , А 0 , Y \ = X - А ,А 0, У2 = Х А , А0, Г3 = Х - A ,А0 или Y, = Х т а ,
где ш,2—
минтерм /-го порядка двух переменных А и А 0; / = 0, 1, 2, 3.
Как следует из табл. 1 и выражений (1), при Х = 1 для каждой комби­
нации адресных сигналов демультиплексор формирует минтерм двух
переменных. Если адресные входы А и А 0 принять в качестве информаци­
онных входов, а вход X в качестве входа разрешения работы, то мультип­
лексор превратится в дешифратор.
На основании (1 ) можно записать выражения для демультиплексоров
1 ~^>N :
(2)
Y„ = X - m iK, / = 0, 1,2,
где m,-,* —
1,
минтерм /-го порядка К переменных А К-\,...гАки- - . , А 0-, К —
число адресных входов; N = 2К— число выходов демультиплексора.
Выражение (2) позволяет построить схему демультиплексора при лю­
бом числе К адресных входов.
Для построения схемы демультиплексора 1 - ) 4 в базисе ИЛИ— НЕ
преобразуем выражения (1), используя формулу А - В С = А + В + С
кона двойственности:
(3)
за­
Г0 = X + Al + A 0 ; Y l = X + A) + A 0 ;
Y2 ~ X + А х + Ад ; I 3 = X + А х+ А0 .
Построенная на основании (3) схема демультиплексора приведена на
рис. 1,6. Схема на рис. 1,в наглядно иллюстрирует его функции как циф­
рового коммутатора.
Каскадирование демультиплексоров. Каскадирование использу­
ется для увеличения числа коммутируемых каналов (выходов). Осно­
вой для каскадирования служат демультиплексоры, имеющие входы
разрешения, или стробирования. С помощью разрешающего сигнала
демультиплексор переводится во включенное или выключенное со­
стояние. Каскадирование демультиплексоров с одним разрешающим
входом осуществляется по двухступенчатой схеме. Вторая ступень в
виде столбца составляется из однотипных демультиплексоров, коли­
чество которых определяется числом J информационных выходов
единственного демультиплексора первой ступени. Информационный
вход X каждого демультиплексора второй ступени соединяется друг с
другом, образуя общий информационный вход устройства. Аналогич­
но одноименные адресные входы А к (к = 0,... Д - 1 ) каждого демульти­
плексора второй ступени соединяются друг с другом, образуя старшие
разряды адресного кода каскадного включения демультиплексоров.
Входы разрешения подключаются к выходам демультиплексора пер­
вой ступени. Так как демультиплексор первой ступени выполняет
функции дешифратора, на его информационный вход X подается уро­
вень логического 0 или 1 (в зависимости от того, какой активный уро­
вень имеет разрешающий сигнал Е ) демультиплексоров второй ступе­
ни. Общее число коммутируемых выходов равно J x 2К.
В качестве примера на рис. 2 приведена схема двухступенчатого
демультиплексора 1 —> 16, содержащего один демультиплексор 1 —» 4
в первой ступени и J = 4 демультиплексора 1 —> 4 — во второй. Так
как активным уровнем сигнала разрешения Е демультиплексоров яв­
ляется уровень логического 0 , на информационный вход демультип­
лексора первой ступени подан сигнал Х = 0 .
Сигналом разрешения
Е = 0 демультиплексор первой ступени переводится в активный ре­
жим работы.
X
DMX0
Ао
А,
Уо
Y,
y2
Y3
X
X
DMX
Ао
п
Yi
А,
h
\Е
DMX,
*0
Ao
A,
У,
y2
\E
Y3
X
Уз
d m x
2
Ао
А1
Аз
Y2
Y3
и
X
Aо
A,
YE
Yo
Y\
DMX3
Yo
Y\
y2
Y3
Уо
Y\
Y2
Y3
Y4
Ys
J±
Yy
Y*
Y9
K.o
I'm
Yu
Г,з
Yu
Ys
Рис. 2. Схема двухступенчатого демультиплексора 1 —> 16
При подаче адресного кода А 3А 2А 1А 0 на одном из выходов Ytl + К3
мультиплексора D M X первой ступени, определяемых кодом А\А0 млад­
ших разрядов, устанавливается уровень логического нуля. Допустим, что
Y\ = 0. Тогда во включенном состоянии будет находиться демультиплек­
сор D M X xвторой ступени. Поэтому входной сигнал X будет передаваться
на один из выходов Л 4, А 5, А 6,А 7, определяемых старшими разрядами АфА3
адресного кода.
1 3 .1 1 . М у л ь ти п л е кс о р ы
Назначение мультиплексоров. М у л ь т и п л е к с о р о м
(Multi­
plexer— M U X ) из M b 1 ( М —> 1 ) называют комбинационное устройство с М
информационными (Х 0, ..., Х т, ..., Хм~\), К адресными (А 0, ..., А к, ..., А К.\)
входами и одним выходом (У), осуществляющее передачу сигнала с каж­
дого информационного входа, заданного адресным кодом, на его единст-
венный выход. Условное графическое обозначение мультиплексора при­
ведено на рис. 1,а. Мультиплексор как цифровой коммутатор позволяет
объединить в единый выходной поток (с разделением по времени) М = 2К
цифровых потоков входной информации.
х3
----
Хо
•
•
•
•
•
А\АоХз
MUX
Х2
А\АрХ2
•
----
X,
Хм-1
---- do
•
•
•
•
А, А рХ,
Хо
|~Р
A\AqXq
Ао
•
•
—
Ак-1
б)
а)
Рис. 1. Условное графическое изображение мультиплексора (а);
схема мультиплексора 4 —> 1(б ) и его представление
в виде коммутатора (в)
П ринципы построения мультиплексоров. Построим схему мульти­
плексора 4 —» 1, заданного таблицей истинности (табл. 1). Структурная
формула мультиплексора в совершенной нормальной дизъюнктивной
форме (С НДФ) имеет вид
(1)
Y =X 0 А,;А 0 vX\ A tА 0 v X 2 А, А 0 wX3A ,А 0 =
= А"оШо,2 v X ,r r i |,2 v
Х2т2,2 V Х3тх2,
где Ш/,2— минтерм г-го порядка двух переменных A h А 0; i = 0, 1,2, 3.
Таблица 1
Выход
Входы
i
А
,
Ао
Y
0
0
0
Хо
1
0
1
X,
2
1
0
х2
3
1
1
Хъ
На основании (1) запишем структурную формулу для мультиплексора
1:
(2)
Y = Хй-то л\
/
XrmLKv - \ / X М- Ут М- ХХ=
- т ;л,
i=0
где т ,х — минтерм /-го порядка К переменных А к^ ,...^4 к,...,А 0; К —
число адресных входов; М = 2 К— число входов мультиплексора.
Используя (2) можно построить схему мультиплексора при любом
числе информационных ( М ) и адресных (К ) входов.
Для построения мультиплексора 4 ^ 1 в базисе И— НЕ преобразуем
(1) по закону двойственности A v B v C v D = А В С D :
(3 )
У = Х 0А , \ - Х , А , А 0- Х ^ - Х ^ А , .
Построенная по формуле (3) схема мультиплексора в базисе И— НЕ
приведена на рис. 1,6. Схема на рис. 1,в наглядно иллюстрирует его
функции как цифрового коммутатора.
К а с к а д и р о в а н и е м уль ти п лек соров . Для увеличения числа ком­
мутируемых каналов (входов) можно использовать двухступенчатую
структуру. Первая ступень в виде столбца составляется из однотип­
ных мультиплексоров, количество которых определяется числом J
информационных входов мультиплексора второй ступени. Одно­
именные адресные входы А к (к = 0 ,...,К -1 ) мультиплексоров первой
ступени соединяются друг с другом, образуя младшие разряды со­
ставного мультиплексора, а выходы подключаются к информацион­
ным входам единственного мультиплексора второй ступени. На его
адресные входы подаются старшие разряды адресного кода. Общее
число коммутируемых входов равно J х 2К.
В качестве примера на рис. 2,а приведена схема двухступенчатого
мультиплексора 32 —> 1, содержащего 4 мультиплексора 8 —» 1 в первой
ступени и мультиплексор 4 —> 1 — во второй. При подаче адресного кода
А ЛА ЪА 2А ЛА 0 на выходах У0 + Уз мультиплексоров первого яруса появляют­
ся сигналы, определяемые младшими разрядами А 2А ,А 0 адресного кода.
Один из поступивших на M U X 4 сигналов У0 + У3 выбирается старшими
разрядами А 4А 3 кода.
Если мультиплексоры имеют вход разрешения Е, то для увеличения
числа коммутируемых входов вдвое можно воспользоваться схемой на
рис. 2 ,6 .
Хо
Хо
•
MUXо
8 —> 1
•
Yo
Х7
X,
Хо
а2
Х3
Аз
Ао
А,
Ai
Ао
MUXi
X, 4 —> I
х2
1о
X,
Ац_
Ао
Ai
Ai
Л2
Аг
>Е
х8
Хо
MUXi
•
8 -» 1
•
Х24
Хо
•
х3,
Хо
•
8 -И
•
Ар
Хо
M UXо
Х |5
MUXз
Х7
8 —> I
Ао
•
А|
Уз
Х7
Ао
Аг
Ь
А,
е
б;
а)
л2
Рис. 2. Схемы мультиплексоров 32 —» 1(а) и 16 —» 1 (6 )
1 3 .1 2 . С у м м а т о р ы
Общие сведения о сумматорах. С у м м а т о р ы предназначены для
выполнения арифметических операций сложения и вычитания как дво­
ичных, так и десятичных чисел. Приведем основные классификационные
признаки сумматоров.
По в и д у
выполняемой
операции
можно выделить
две группы сумматоров:
=> сумматоры, выполняющие сложение положительных чисел (без учета
знака числа);
=> сумматоры, выполняющие операцию сложения положительных и
чисел. Такие устройства называют сумматорамивычитателями. Они могут работать в режиме алгебраического (с уче­
отрицательных
том знака) суммирования и вычитания чисел.
По и с п о л ь з у е м о й
с и с т е м е с ч и с л е н и я сумматоры
подразделяются:
=> на двоичные сумматоры, выполняющие операции над двоичными числами;
=> на десятичные сумматоры, выполняющие операции над десятичными
числами, представленными в двоично-десятичном коде.
По
ции
последовательности
во
выполнения
опера­
в р е м е н и выделяют:
=> параллельные сумматоры, в которых все разряды складываемых чисел
подаются на входы сумматора одновременно. Такие сумматоры строятся
на комбинационных устройствах и рассматриваются в дальнейшем;
=i> последовательные сумматоры, на входы которых разряды складывае­
мых чисел подаются последовательно во времени (разряд за разря­
дом). В них используются элементы памяти.
Среди д в о и ч н ы х
сумматоров
различают одноразрядные и
многоразрядные сумматоры. Одноразрядные сумматоры служат основой для
построения многоразрядных. Многоразрядные сумматоры подразделяются
на сумматоры с последовательным и параллельным переносом.
Для доступности излагаемого материала будем рассматривать сумма­
торы, выполняющие операцию сложения целых чисел.
Одноразрядные сумматоры. Различают два типа одноразрядных
сумматоров: неполные и полные сумматоры.
Неполным
одноразрядным
сумматором
(полу­
сумматором) называют комбинационное устройство с двумя входами и
двумя выходами, выполняющее сложение двух одноразрядных чисел по
правилам двоичной арифметики. Полусумматор используется при сложе­
нии самых младших разрядов двух двоичных чисел. На его входы посту­
пают сигналы младших (нулевых) разрядов А 0, В 0, а с выходов снимаются
сигналы нулевого разряда суммы Sn (S — Sum) и переноса С i (С — Carry)
в первый разряд. Правила функционирования полусумматора отображе­
ны в табл. 1, а условное графическое обозначение показано на рис. 1 .
Таблица 1
Входы
Выходы
Во
Ао
0
0
1
1
0
1
0
1
с,
0
0
0
1
So
0
1
1
0
Как следует из табл. 1, полусумматор реализует логические функции
сложения по модулю два (неравнозначности, исключающего ИЛИ) и
конъюнкции (логического умножения):
(1)
Sq = Во® Ао = В 0А 0 + В0А0= В 0А0 + ВдА0 ; С ] = B qA q .
На рис. 1,6, в показана схемная реализация полусумматора и операции
сложения по модулю два на элементе 2И— И Л И — НЕ.
«)
6)
Рис. 1. У словн ое графическое обозначение полусумматора (а),
его логическая схема (б ) и реализация операции сложения
по модулю два (в)
Полным
одноразрядным
сумматором
называют
комбинационное устройство с тремя входами и двумя выходами, выпол­
няющее сложение трех одноразрядных чисел по правилам двоичной
арифметики.
Таблица 2
Входы
Выходы
с,
В,
А,
С-,+1
0
0
0
0
0
0
1
0
1
0
1
0
0
1
0
S,
0
0
1
1
1
1
0
0
0
1
1
0
1
1
0
1
1
0
1
0
1
1
1
1
1
Полные одноразрядные сумматоры используются в многоразрядных
сумматорах при сложении разрядов двоичных чисел, начиная с первого.
На входы сумматора поступают сигналы А ; , В, i-то разряда и сигнал С,
переноса из предыдущего разряда, с выхода сни­
—
А,
—
В,
—
с,
SM
S,
С,+ |
Рис. 2. У слов н ое гра­
фическое обозначение
полного сумматора
маются сигналы текущего разряда S, суммы пере­
носа С,+ 1 в следующий разряд. Правила функцио­
нирования полного сумматора отображены в табл.
2 , его условное графическое обозначение приве­
дено на рис. 2 .
Как видно из табл. 1 и 2, при С, = 0 полный сум­
матор выполняет функции полусумматора. На осно-
вании табл. 2 можно получить различные формы аналитического описания
и, следовательно, схемного представления полного сумматора.
Пример
1. По данным табл. 2 составим выражение для суммы в
совершенной дизъюнктивной нормальной форме (СДН Ф ) и преобразуем
его, учитывая ( 1):
(2)
S, = С,. (B j ® А , ) +С,.(5, ® А ,) = С , ® 5,. ® А ,.
Используя карту Карно (рис. 3,а) и формулу А + В + С = А ■В С
кона двойственности, запишем выходной сигнал переноса в виде
за­
С , = С Д v С Д v B A i = C,B i ■C iAi ■В, А, .
(3)
На рис. 3,6 изображена схема полного одноразрядного сумматора, по­
строенная в соответствии со структурными формулами ( 2 ) и ( 3 ).
С, В, А,
С, В Л
А,
00
01
11
1
-Л
1— J
\/
1
&
N \‘
BiAj
"~1 CjB
&
В/
Ло
Во
HS
CiA
В,А
&р
С,
&и
С,В,
а)
Ai
Si
с ,е в,
10
б)
So
С-1
В, 0 А,
BiAi
•4о
Во
HS
^>0
Si —Bj 0 А, 0 С,
Cj(Bj 0 Aj)
Ci +1
С,
«)
Рис. 3. Карта Карно для полного сумматора (а) и его схемная реализация
на логических элементах ( б) и полусумматорах (в)
П р и м е р 2. Составим схему полного сумматора из двух полусум­
маторов. Для этого, воспользовавшись табл. 2, запишем выражение для
переноса в (г + 1)-й разряд в СДНФ и преобразуем его:
(4)
С,+1 = С,В, A, v С,В,А, v С,В,A, v С Д Д = В,A, v С,.(Д Ф А , ) .
На рис. 3,в приведена схема полного сумматора, построенная на осно­
ве полусумматоров в соответствии с выражениями (2) и (4).
М ногоразрядны е двоичны е сумматоры. Сумматоры этого клас­
са выполняют операцию сложения двух операндов, каждый из кото­
рых представляет собой «-разрядное двоичное число. Используют
два типа сумматоров: сумматоры с последовательным и параллель­
ным переносом.
Сумматоры
с
последовательным
переносом.
Для вычисления суммы двух «-разрядных двоичных чисел можно ис­
пользовать неполные и полные одноразрядные сумматоры. На рис. А,а,б
приведены схема 4-разрядного сумматора и его условное обозначение.
Схема составлена из четырех полных одноразрядных сумматоров S M
путем соединения выхода переноса предыдущего одноразрядного сумма­
тора с входом переноса последующего. Такой сумматор называется сум­
матором с последовательным переносом. Использование в нулевом раз­
ряде полного одноразрядного сумматора расширяет функциональные
возможности 4-разрядного сумматора. Сумматор с последовательным
переносом обладает низким быстродействием, поскольку сигналы суммы
St и переноса C i+X на выходе /-го одноразрядного сумматора появляются
после того, как сформируется сигнал переноса С,- в предыдущем (г - 1)-м
одноразрядном сумматоре.
а)
б)
Рис. 4. Четырехразрядный сумматор с последовательным переносом (а)
и его условное графическое изображение (б )
Сумматоры
с
параллельным
переносом.
Рас­
смотрим способ повышения быстродействия на примере 4 -разрядного
сумматора. Для этого запишем выходной сигнал переноса (3 ) в виде
(5 )
С,*, =
где
G , = А ,--В , ;
G,
v
P jC t,
Р, = Л, v
В ,.
Из (5) следует, что:
=> сигнал G j—1 вырабатывается (генерируется) при наличии обоих сиг­
налов в данном разряде (т.е. перенос происходит при А , = В , = 1), по­
этому он называется функцией генерации переноса;
=> сигнал P j= 1 разрешает прохождение переноса С,= 1 на выход, поэто­
му он называется функцией распространения переноса.
Используя (5), запишем следующие выражения для сигналов переноса:
(6 )
С, = G 0v P 0C 0 , С г = G xwP xC x = G X^ P \ G ^ P XP ^ ,
С3 = G 2v P 2С 2 = G2v P 2G, v P 2P, G ovP iP tP o C o ;
(7)
C4 = G3VP 3C3 = G jv P iG i v P i P i G i v P & P i G o v P i P f i P a C o .
Выражения ( 6 ), (7) свидетельствуют о том, что для получения сигна­
лов переноса C,+i (i = О, 1, 2, 3) достаточно располагать функциями G h Р,
(по сути, входными сигналами A it В ; разрядов слагаемых) и сигналом
внешнего переноса С0. Они описывают двухступенчатые комбинацион­
ные устройства, в первой ступени которых формируются логические
произведения, а во второй — логические суммы. Поэтому можно считать,
что сигналы всех переносов будут сформированы одновременно и за бо­
лее короткий промежуток времени, чем в схеме многоразрядного сумма­
тора с последовательным переносом. Рассмотренный способ формирова­
ния переносов называется параллельным, а сумматоры, построенные по
этому способу, — сумматорами с параллельным переносом. Используя
соотношения ( 6 ), (7), можно построить схему ускоренного ( параллельно­
г о ) переноса для 4-разрядного сумматора.
Путем соединения выводов переноса Со, С4 4-разрядных сумматоров в
последовательную цепь можно построить сумматоры с разрядностью 8 ,
12, 16 и т. д. Такой многоразрядный сумматор называют сумматором с
последовательным групповым переносом. Для реализации параллельного
группового переноса представим ( 8 ) в виде
(8)
C 4= G v P C 0, где
(9)
G = G i v P iG 2v P iP 2G lv P 3P 2P ] G 0, Р = Р ъР 2Р , Р 0С п.
Так как выражения ( 8 ) и (5) имеют одинаковую структуру, параллельный
групповой перенос между 4-разрядными сумматорами выполняется в соот­
ветствии с выражениями ( 6 ), (7), т.е. так же, как и параллельный перенос
между отдельными разрядами каждого 4-разрядного сумматора. При этом в
устройстве переноса каждого 4-разрядного сумматора должны быть допол­
нительно сформированы сигналы (9). Схема ускоренного переноса, постро­
енная с использованием формул ( 6 ), (7), (9), изображена на рис. 5.
G 3 G j G 1 Go P i P i Р\ Ро Со
Рис. 5. Схема ускоренного переноса
Как видно из рис. 5, схема ускоренного переноса с помощью вход­
ных сигналов С0, G „ Р, (г = 0, 1 , 2, 3) формирует переносы в старшие
разряды Ci + С4, а также функции генерации G и распространения Р
переносов, используемые при групповом включении 4-разрядных
сумматоров. Формирование сигналов G P i (i = 0, 1, 2, 3) и сигнала 5,
суммы двух одноразрядных двоичных чисел возлагается на формиро­
ватель. На рис. 6 представлен один из возможных вариантов схемы
формирователя.
Рис. 6 . Схема формирователя
При построении этой схемы использовалось тождество
А ,-В ,
®
(А ^ В ,)
= G, ®
Pi
=
Ai
®
В /.
Для его доказательства воспользуемся выражением (1) и формулами
закона двойственности (13.10.4):
ЛГ В , ( А
v Bi) v A r Bi ■( Aj v £,.) =
= Ar Bi - A r Bl + ( A l v B l) - ( A , v B l) =
= А ; ■A,, v А, ■В , v В : ■A, v Bj •Bj = А , ® В г
Структурная схема 4-разрядного сумматора с ускоренным переносом
изображена на рис. 7. Сумматор содержит четыре одинаковых формиро­
вателя (Ф 0, Ф], Ф 2, Ф 3) отдельных разрядов суммы S,, функций генерации
G, и распространения Р, переноса (рис. 6 ), а также схему ускоренного
переноса (рис. 5), генерирующую, помимо переносов С 1+С 4, функции
генерации G и распространения Р для группового переноса.
Рис. 7. Схема 4-разрядного сумматора с ускоренным переносом
Сумматоры -вычитатели двоичных
чисел. Операцию вычитания
двух положительных чисел можно рассматривать как операцию алгеб­
раического сложения чисел с разными знаками. Поэтому для реализации
арифметической операции вычитания с помощью рассмотренных выше
сумматоров необходимо каким-то образом представить знак числа.
Обычно для знака «-разрядного двоичного числа отводится дополнитель­
ный ( « + 1)-разряд. Знак числа указывается в самом старшем разряде: 0
соответствует положительному знаку числа, 1 — отрицательному знаку.
Для представления чисел со знаком широко используется дополнитель­
ный код} позволяющий не только представить положительные и отрица­
тельные числа, но и упростить (например, по сравнению с обратным ко­
дом) выполнение операции алгебраического сложения.
Представление
чисел
со
знаком
нительном
в
допол­
к о д е . Положительные десятичные числа +(2"-1)...+1
и 0 в дополнительном коде представляются как (п + 1)-разрядные числа в
двоичной системе счисления с 0 в самом старшем разряде. Например,
десятичное число + 6 10 в дополнительном коде имеет вид 01 ЮгДля представления отрицательных десятичных чисел —1— —(2"—1) в
дополнительном коде используется следующий алгоритм:
=> над отрицательным числом выполняется операция взятия по модулю;
=> модуль отрицательного числа представляется как (п + 1)-разрядное
число в двоичной системе счисления (с 0 в самом старшем разряде);
=> над двоичным числом выполняется операция логического отрицания
(поразрядная инверсия);
=> к полученному числу прибавляется 1 .
П р и м е р записи числа —6 )0 в дополнительном коде. Алгоритм
можно представить в виде следующей цепочки операций:
| —6 10| =>6,о =>0110 => 1001 => 1001+1 => 1010.
Ниже приведена запись всех десятичных чисел в дополнительном ко­
де для п = 3.
0
0000
+1
000 1
-1
1111
+2
00 1 0
-2
1110
+3
0 0 11
-3
110 1
+4
0 1 00
-4
1100
+5
0 10 1
-5
10 11
+6
0 110
-6
10 10
+7
0 111
-7
100 1
Дополнительный код можно рассматривать как преобразование дво­
ичных чисел, включающее две операции (поразрядную инверсию и при­
бавление единицы), которые приводят к изменению знака числа. Выпол­
ним эти операции для числа + 6 ,о:
0 1 1 0 => 1001 + 1 = 1010 = > - 6 10.
Теперь выполним те же операции для числа - 6 ,о:
Из соотношения (10) следует, что свойство дополнительного кода из­
менять знак двоичного числа можно использовать для перевода отрица­
тельных двоичных чисел в десятичную систему счисления.
Переход к десятичной форме представления осуществляется в сле­
дующей последовательности:
=> вместо единицы в самый старший разряд записывается знак минус (-);
=> из оставшейся части образуется дополнительный код;
=> результат переводится в десятичную форму.
Н а п р и м е р , 1010 => —[010] =>-[10 1 +1=110] => - 6 ю.
Использование
дополнительного
кода
для
алгебраического
с л о ж е н и я . Представление чисел в до­
полнительном коде позволяет выполнять их сложение и вычитание с уче­
том знака, при этом результат также получается в дополнительном коде.
Для выявления особенностей реализации этих операций ниже приведены
примеры, в которых операция вычитания 3-разрядных двоичных чисел
заменяется операцией алгебраического сложения путем изменения знака
вычитаемого.
Примеры 1 и 2 свидетельствуют о том,
что при выполнении операций алгебраиче­
ского сложения двоичных чисел (с учетом
знака) необходимо, чтобы сумма модулей
их десятичных эквивалентов не превышала
2"
- 1 , где п — количество значащих разря­
дов двоичных чисел (и = 3). Нарушение это­
Ирнмеры
,
1
1001 является 4-разрядным числом и выхо­
дит за пределы отведенной разрядной сетки.
При выполнении условия указанного вы­
ше условия и получении результата в виде
5-разрядного операнда (пример 4) 5-й раз­
ряд отбрасывается.
Схемная
реализация
_6
*
0110
+9
+9
1001 ( '? )
+3
0011
+3
*+4 *0100
2
го условия приводит к ошибочному резуль­
тату. В примере 1 получен ошибочный ре­
зультат —7, так как 9 > 23— 1, т.е. результат
- +3 ++3 +001!
3
4
+3
+7
0111
_+3
+3
ООП
-1
-1
1111
-3
-3
1101
_4
+4
0100
+4
Ч
U 00
-1jjpoooi
Отбрасывается
с у мма т о р а - в ы читателя.
Для выполнения операций алгебраического сложения и вычитания дво­
ичных чисел в дополнительном коде используются сумматоры. Схема 4разрядного (с учетом знакового разряда) сумматора-вычитателя, содер­
жащего 4 одноразрядных полных сумматора и 4 логических элемента
исключающее ИЛИ, приведена на рис. 8 . На входы сумматора-
Выходы
вычитателя поступают два дво­
ичных числа, представленных
Z © 5,
4-разрядными дополнительными
Таблица 3
Входы
Z
в,
0
0
0
0
1
1
1
0
1
1
1
в,
кодами А у А 2А \ А о и В ЪВ 2В\В0, а
также сигнал Z установки режи­
в>
режиму сложения, a Z = 1 —
ма. Значение Z = 0 соответствует
0
С выхода
сумматора-вычитателя снимается
режиму
4 -разрядный
вычитания.
дополнительный код результата S3S2S]S0, где S3 — знаковый
разряд. Выход переноса C,+i одноразрядного сумматора SM3 не использу­
ется. Элементы исключающее ИЛИ пред­
назначены для подачи на входы однораз­
рядных сумматоров разрядов В, в прямой
( Z - 0 ) или инверсной (Z = 1) форме в со­
с,
ЛО
йз
ответствии с табл. 3.
При Z = 0 на входах логических эле­
ментов исключающее ИЛИ действуют
нулевые сигналы, поэтому сигналы разря­
рядов В , на входе переноса первого полно­
%
В,
0
SM
с ».
S,
А,
В,
С,
1
ИМ
См
S.
$г
А,
на входе переноса С, первого полного
сумматора сигнал также равен нулю. Сле­
операндов.
При Z = 1 логические элементы исклю­
чающее ИЛИ инвертируют сигналы раз­
S,
А,
с
дов В, поступают на входы В , всех полных
одноразрядных сумматоров без инверсии,
довательно, происходит сложение двух
ш
в.
с,
л%
2
SM
<Vi
S,
Sy
А,
В,
3
с *,
Рис. 8 . Схема сумматоравычислителя
го одноразрядного сумматора С0=1, бла­
годаря чему образуется дополнительный код вычитаемого, поэтому вы­
полняется операция вычитания.
1 3 .1 3 . А р и ф м е т и ч е с к о -л о ги ч е с к и е у с т р о й с т в а
Назначение. А р и ф м е т и ч е с к о - л о г и ч е с к и е
устройства
(А Л У ) предназначены для выполнения арифметических и логических
операций над «-разрядными операндами А = А„.\...А\Ао и В — В „ .\ ...В \ В 0 .
Вид выполняемой операции задается сигналом М ( Mode — режим). На­
пример, 4-разрядные А Л У (п = 4) выполняют 16 арифметических ( М = 0) и
16 логических ( М = 1) операций. Выбор одной из 16 арифметических или
логических операций осуществляется с помощью 4-разрядного кода
Е зЕ 2Е\Ео- Логические операции над операндами выполняются поразрядно:
А = А3А 2А 1А 0,
В - В^В2В ХВ 0,
А * В = (А 3 * В } ) ( А 2 * В 2)(Л, * В , ) ( Л * В 0).
где знак « * » — любая двуместная операция алгебры логики (ИЛИ, И,
ИЛИ— НЕ, И— НЕ, исключающее ИЛИ и др.).
Помимо операндов на вход А Л У подается сигнал переноса С0. Резуль­
тат выполнения операции снимается с выходов в виде функций F ,
(/ = 0, 1,2, 3) для отдельных разрядов. При выполнении арифметических
операций А Л У представляет собой 4-разрядный сумматор с параллель­
ным переносом. Поэтому в А Л У , как и в сумматоре, имеются выходы
переноса С4, G и Р, используемые для последовательного или параллель­
ного каскадирования 4-разрядных секций.
Рассмотрим функции и принципы построения 4-разрядных А Л У .
Ф ункции А Л У . Основой для построения А Л У служат двоичные сум­
маторы, для которых полученное в параграфе 13.12 выражение суммы
/-го разряда имеет вид
(1)
S, = С, ® В, © А , .
Для выполнения логических операций и расширения функциональных
возможностей сумматора примем следующие меры:
=> путем замены в (1) С, на С, v М создадим условия для блокировки пе­
реноса (при М = 1 перенос блокируется);
=> вместо разрядов А/ и fi, операндов А и В в (1) будем использовать
функции
(2)
t f = Е хBt v а д v А,,; / в = EjBA, v Е2В, А ,
Принимая в (1) S, - Fj, получаем следующее выражение для описания
функций АЛУ:
(3) F , = (Е 3В,А; v Е 2В, А ,) ® ( Е уВ, v ад,- v А ,) ® (С, v М ).
При М = 0 выражение (3) позволяет выявить 16 арифметических опе­
раций, а при М = 1 - 16 логических операций, выполняемых А Л У . Вид
выполняемой арифметической и логической операции определяется
4-разрядным кодом Е ЪЕ 2Е ХЕ{).
Для перехода к операциям над операндами следует в полученных вы­
ражениях заменить А, на А, 5, на В, С, на СО = ОООС0, 0 на 0000, 1 на 1111,
а для арифметических операций (М = 0 ) дополнительно — символ ® на
знак « + » арифметического сложения.
В табл. 1. приведены преобразования исходных выражений (3) и ко­
нечные выражения (графы М = 0 и М = 1) для операций F, А Л У над от­
дельными разрядами А,- и В, операндов. Для преобразований использова­
лись следующие формулы:
b ® a = b a v b a = b a v b a;
b ®b = 0;
bva = b a ;
b ® l = b;
ba-bva.
Операции, выполняемые А Л У над входными операндами, приведены в
табл. 2. При описании операций использовались следующие обозначения:
=> А, В — входные 4-разрядные операнды;
=> 0 = 0000, 1 = 1111 — 4-разрядные операнды со значениями каждого
разряда, равными 0 и 1 соответственно;
=> СО = 000С0 — 4-разрядный операнд, самый младший разряд которого
задействован для входного сигнала переноса;
=> знак « + » для операции арифметического сложения операндов;
=> символы v, &, ® для операций логического сложения, умножения и
исключающего ИЛИ операндов;
=> А , В -— поразрядное инвертирование операндов А, В.
Сопоставление табл. 2 с табл. 13.1.2 (параграф 13.1) свидетельствует о
том, что А Л У выполняет все 16 возможных логических операций над
двумя переменными, т.е. А Л У является универсальным устройством с
точки зрения выполнения логических операций.
Отметим некоторые особенности арифметических операций. Для
расширения функциональных способностей А Л У :
=> предусмотрена возможность реализации арифметических операций
со значениями входного сигнала переноса Со = 0 и Со = 1. При Со = 1
на входе А Л У появляется дополнительный операнд 0001;
=> большинство арифметических операций совмещено с предварительно
выполненными логическими операциями. С этой точки зрения весьма
полезной является операция А + В + СО (/ = 6 ), которая при СО = 0001
позволяет получить разность операндов А - В с представлением
результата в дополнительном коде. При А = 0000 и СО = 0001 с по­
мощью этой операции формируется дополнительный код операнда В.
Для представления операнда в дополнительном коде можно использо­
вать и другие операции, например, (A v В ) + СО (; = 2);
=> имеется операция сложения двух одинаковых операндов'. А + А + СО
(г = 12). При выполнении этой операции производится сдвиг операнда
1
Таблица
1^
«Ч
«Г о I ’’’Г
II II
>
=Q~
>
«Г
>
05
1=5 l=Q
о
О
©
>
©
^г
ф
® «г
1OS» II
Х~
>
О)'
ф
п
Ч'
<Ч'
м
ф
■чГ
1=5
U
«Г
ф
Ч"
1=5
ф
■чГ
1=5
1^
>
1=5
II
>
0
"Т~
©
©
«г
>
О
*
II
1=5
II
1=5
1=5
Ф
■чГ
ф
■чГ
осГ
1=5
«5
>
«Г
о
«з
ч
>
1=5_
©
>
©
°сГ
I озГ
гч
>
>
1=5
«Г
>
■чГ
1=5
1^Г
н
®
■чГ 1=5
>
1=5
Ч'
1=5
>
«Г
ч—'
Ф 1=5
>
1=5 о
1=ч
|0Q
oq~
и 1=5
и
1=5
of
II
1^
к~
1=5
© 1=5
>
■<г
1^
1=5
Ч'
1=5
N
осГ
и
осГ /—
V
>
>
>
К ' 1=5
1=5 «Г 'w '
ф
>
■чГ
1=5
■чГ
1=5
> 1=5
«5
'•W'
II
■чг
ф
аз'
о
II
ч
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
о
Продолжение табл. 1
оз
1°э
of
of
II
—
е
—
е
осГ
II
г—
0
— х
>
0
+
К «г
I«S'
1^
©
^г
l«5 II
«Г
U
U'
>
®
of
|w
03
ОсГ
>
>
11=5
SS
0
1=5
<ч
>
ofГ"!
0
Of II
II К
|о=Г
of
0
of 0
■чГ >
of
of
N '
и
ч
>
аз'
of
II
■чГ
II
II
>
43■чГ 0
of
осГ >
of
« г
о
■чГ
о
о
о
II
Ч'
0
Ч"
II
"ч'
©
II
и
>
0
■чГ 1=5
>
1«|
> Чof
5S
«з
К
'
К '
II
|of
©
>
II
II
II 1
✓
““V 1^
■чГ 1 °з
0
>
«г
К
'
и
@
II
of
К '
II
"Ч"
>
>
«г
>
'Э К~
II 'Э .
■чГ >
ф
1«5
||Ч
W Iо=Г > !£ , 1 оз
Ф
ф
К ' I «5
К '
of
>
>
ч~ >
о
и
II о
II
II
>
Ы~
«5~
II
§
'Г '
0
«Г
«го
©
■'Ч
>
о
о
|
ОД 1ОД ОД
>
1од е
CQ
0 oq
'ч: 1^5
А&В
А&В
А &в
О
-
ICQ О
Д
> >
|
М= 0
Арифметические операции
Таблица 2
Логические операции
М= 1
>
1^
. ГЛ
8
+
8
+
8
+
8
8
8
+
8 8
+ +
1од 8
+
+
8 |ОД
1од
Icq +
<*S
|О
Д
3
> >
+ +
3
3
3
3 3
+ од
+ +
>
+
8
+
CQ
+
3
+
8
8
8
+ 8
од +
+
+
+
+ +
3
+
IfiQ +
>
од
>
8
1од +
>
3
3
3
3
о
-
о
-
о
-
о
-
О
-
о
- О
-
о
-
о
о
-
-
о
о
-
-
О
О
-
- о
о
-
-
о
о
о
о
-
-
-
-
о
О
о
о -
-
-
-
о
о
о
о
о
о
о
о
о
-
CN гл "3- U1 40 г~ 00 О4» о
- (N ГЛ Tf
А на один разряд влево (в сторону старших разрядов) с записью в
младший разряд значения сигнала входного переноса Со- Указанный
сдвиг обусловлен увеличением числа А в два раза, что равносильно
операции умножения на 2 , а следовательно, для двоичных чисел сдви­
гу влево на один разряд;
=> имеется операция А + СО (г = 0), которая при СО = 0001 аналогична опе­
рации инкрементации (увеличения на + 1), выполняемой счетчиками.
Принципы формирования переносов. Запишем полученное в пара­
графе 13.12 выражение для переноса в (i + 1 )-й разряд в виде
(4)
С/+1 = G,
V Р;С,
= f A ■f B V ( f A v f B) - C l ,
где f A, f B— функции, определяемые соотношениями ( 2 ), используются
в А Л У вместо А ( и В,.
На основании (2) и (4) запишем выражения для функций генерации и
распространения переноса с учетом того, что Х - Х = Х,
X ■X = 0,
X v 1 = 1:
(5)
G,- =
•f B = (£, В, v ад,- v Л ,Н Е 3В Л v Е г В, А ,) =
= Е хЕ 2 S, А,- v EoE3BjAj v E 3B A j v E2 BlA, =
= (£, v 1)-E 2 B, Aj v (E 0v 1)-Е ф ,А , = E3B A , v E 2B, Ai = f B,
(6 )
Pi = f A v f B = £, S, v а д v ^ v Еф ,А, v E 2% A, =
= £, B,.
V
а д , V ^, (1
V а д и ,-
v E 2B tA ,) = £■, B, v а д ,
V
= f A.
Как следует из выражений (3), (5), ( 6 ), функции F„ выполняемые
А Л У , функции генерации G, и распространения Р, переноса могут быть
сформированы в одном устройстве, которое назовем формирователем.
Принципы построения А Л У . Арифметическо-логическое устройст­
во, подобно 4-разрядному сумматору, можно представить как совокуп­
ность четырех идентичных формирователей Ф 0-Ф з и схемы ускоренного
переноса. Работа формирователей А Л У описывается функциями (2), (3).
Схема формирователя, построенная в соответствии с выражением (3),
изображена на рис. 1. На входы формирователя подаются:
=> сигналы г'-х разрядов операндов (А,, В/) и переноса С,;
=> сигнал М выбора вида выполняемой операции (арифметической М - 0
или логической М = 1);
=> 4-разрядный код Е 3Е гЕ хЕ0 выбора выполняемой арифметической или
логической операции.
Рис. 1. Схема формирователя А Л У
С выхода формирователя снимаются:
=> результат выполненной операции для /'-го разряда в виде функции Ff,
=> сигналы для формирования переноса C i+X в следующий разряд в виде
функций генерации и распространения переноса
G , = EiBjAt v E j В, А / , Р/ = Е\ В, v £ (Д v А,-.
При Е 3 = 1, Е2 = О, Е, = О, Е 0 = 1 (табл. 2, i = 9 — операция сложения
двух операндов) получаем известные функции генерации и распростра­
нения переноса для прямых операндов А и В, при Е 3 = О, Е2= 1, Е\ =1, Е 0 = О
(табл. 2 , i - 6 ) — функции генерации и распространения переноса для
прямого А и инверсного В операндов.
Рис. 2. Структурная схема 4-разрядного А Л У
Устройство переноса строится по схеме, приведенной на рис. 2
(п. 13.12), так как выражение (4) переноса в (г + 1)-й разряд для А Л У
имеет такой же вид, как для сумматора. Снимаемые с его выходов сигна­
лы G, Р предназначены для организации группового параллельного пере­
носа при построении 8 -, 12-, 16-разрядных А Л У на основе рассматривае­
мого 4-разрядного А Л У . Структурная схема 4-разрядного А Л У изобра­
жена на рис. 2 .
14. П О С Л Е Д О В А Т Е Л Ь Н О С Т Н Ы Е У С Т Р О Й С Т В А
1 4 .1 . Т р и гге р ы
Назначение триггера.
Триггер
— это простейшее устройство по­
следовательностного типа с двумя устойчивыми состояниями, предна­
значенное для ввода, хранения и вывода одного бита (разряда) информа­
ции в двоичных кодах.
Входы триггера и подаваемые на них сигналы делятся на информацион­
ные и вспомогательные. Информационные сигналы управляют состоянием
триггера, которое определяется значением (0 или 1) сигнала на его основном
(прямом) (2-выходе. с другого Q -выхода снимается инверсный сигнал. При
Q = 0 говорят, что триггер находится в нулевом состоянии, или состоянии
логического нуля; при Q = 1 — в единичном состоянии, или состоянии логи­
ческой единицы. Вспомогательные сигналы служат для предварительной
установки триггера в заданное состояние и его переключения (синхрониза­
ции), а в некоторых случаях — для разрешения управления состоянием.
Входы, выходы триггера и подаваемые на них сигналы обозначают пропис­
ными латинскими буквами S, R, D, J, К, С, Q и др.
Классиф икация триггеров. Триггеры классифицируют по ряду при­
знаков.
По ф у н к ц и о н а л ь н о м у
признаку триггеры можно разбить
на четыре основные группы:
=> 7?S’-триггеры, позволяющие произвести раздельную установку 0 и 1
путем изменения комбинации сигналов на S- и Л-входах;
=> D -триггеры, или триггеры задержки, осуществляющие прием инфор­
мации по одному входу с некоторой задержкой после подачи сигнала
на D-вход;
=> Г-триггеры, состояние которых изменяется на инверсное с приходом
каж дого импульса на его счетный Г-вход;
=> УАГ-триггеры, или универсальные триггеры.
По с п о с о б у
ют на две группы:
приема
информации
триггеры разделя­
=> асинхронные (нетактируемые) триггеры, которые реагируют на ин­
формационные сигналы в момент их появления на входах;
=> синхронные (тактируемые) триггеры, реагирующие на информацион­
ные сигналы только после подачи на вспомогательный С-вход син­
хроимпульса.
По с х е м н о м у
признаку различают:
=> одноступенчатые триггеры, содержащие один элемент памяти, в ко­
торый сразу заносится входная информация;
=> двухступенчатые триггеры с двумя элементами памяти, управляемы­
ми с помощью синхроимпульсов таким образом, что вначале инфор­
мация заносится в первый элемент, а затем — во второй.
Бистабильная ячейка. Основой для построения триггеров служит
бистабильная ячейка, представляющая собой два инвертора, включенных
по кольцевой схеме, когда выход первого инвертора подключен к входу
второго, а выход второго — к входу первого. Возможны только два ус­
тойчивых стационарных состояния бистабильной ячейки:
=> на выходе первого инвертора Q\ = 1, на выходе второго Q 2 = О
(рис. 1,а);
=> на выходе первого инвертора Q\ = 0, на выходе второго Q 2 = 1
(рис. 1,6).
Для детального доказательства этого утверждения рассмотрим прин­
ципиальную схему бистабильной ячейки на биполярных транзисторах,
изображенную на рис. 1,в. В приведенной схеме выход первого инверто­
ра (коллектор «к1» транзистора VT\) подключен к входу второго (база
«6 1 » транзистора VT2), а выход второго инвертора (коллектор «к 2 » тран­
зистора VT2) — к входу первого (база «6 1 » транзистора VT,).
Покажем, что бистабильная ячейка может находиться в одном из двух
устойчивых состояний, когда VT\ открыт— VT2 заперт (рис. \,г) или VT\
заперт— VT2 открыт (рис. l,d).
В силу асимметрии отдельных плеч схемы после включения питания + Е
через резисторы R u R2 не могут протекать одинаковые токи. Воспользовав­
шись схемой бистабильной ячейки на рис. \,в, рассмотрим, что произойдет
при увеличении и уменьшении одного из токов, например тока 1\.
Увеличение
тока /, через R\ приводит к понижению напряже­
ния С/ к1 = Е - /?,/, на коллекторе «к 1 » VTt и, следовательно, напряжения
U 62 = U K1 на базе «6 2 » VT2. Это вызывает уменьшение тока / 2 через R 2,
возрастание напряжения U k2 = Е - R 2I 2 на коллекторе «к2» VT2, напряже­
ния Uei = U k2на базе «61 »K7"i и дальнейшее увеличение тока /] через R\ до
полного отпирания VT\ и уменьшение тока / 2 через R 2 до полного запи­
рания VT2 (рис.1,г). Протекающие процессы могут быть представлены в
виде следующей цепочки:
Л Т -> Л, /, Т - » Е - Л, /, = U Kl = U621 - »
—> I2 nL — ^
^2 ^
а)
^ ^ — ^2 ^2 = ^к2 = ^61^ — ^
б)
в)
Рис. 1. Схемы бистабильной ячейки и ее состояния
При полном отпирании транзистор VT\ представляет собой замкну­
тый ключ, поэтому напряжение на коллекторе «к 1» близко к нулю, что
соответствует уровню логического нуля (Q\=0). В запертом состоянии
транзистор VT2 моделируется разомкнутым ключом, ток через резистор
R 2 не протекает и напряжение на коллекторе «к2» имеет высокий уро­
вень, соответствующий уровню логической единицы ( Q i= l).
У м е н ь ш е н и е тока 1\ через Л, вызывает следующие процессы в
схеме на рис.1 ,в:
/, i -> 7?i Л i -> £ -/ ? ,/ , = U Kl= и 62 Т-н>
—> I 2 Т —> R212 Т —> Е —R212 ~ U k2= ^/б1^ —^
— > i\ -L,
которые приводят к запиранию VT\ и отпиранию VT2 (рис. 1,д).
Приведенные на рис. 1,г,д состояния ячейки могут сохранять до тех
пор, пока не будет выключено напряжение питания +Е.
Для управления состоянием ячейки ее дополняют двумя транзистора­
ми, получая при этом схему асинхронного /?5-триггера. Рассмотрим два
способа включения дополнительных транзисторов.
Асинхронный Л5-триггер на элементах И Л И — НЕ. Подключив до­
полнительный транзистор VTS параллельно транзистору VT\, а дополни­
тельный транзистор VTR — транзистору VT2 бистабильной ячейки, полу­
чим принципиальную схему асинхронного Л5-триггера на двух логиче­
ских элементах И Л И — НЕ (рис. 2,а). На рис. 2,6 приведена логическая
схема асинхронного ^S-триггера, а на рис. 2,в — его условное графиче­
ское обозначение.
Рис. 2. Принципиальная (а) и логическая (б) схемы асинхронного Л5-триггера
на элементах ИЛИ—НЕ и его условное графическое обозначение (я)
Принцип
р а б о т ы . Асинхронный /?5-тригтер имеет два инфор­
мационных входа: вход S ( Set — установка) для установки 1 и вход R
(Reset — сброс) для установки 0 и два выхода: прямой Q и инверсный Q .
Состояние триггера характеризуется сигналом на прямом выходе Q и опре­
деляется комбинацией входных сигналов S и R. Для пояснения принципа
работы триггера обозначим 5*, Rt1, Q f — значения сигналов на к-м временном
интервале, 0*“' — предшествующее состояние триггера. Выявим состояние
триггера (значение выходного сигнала £>*) после подачи на его вход четырех
возможных комбинаций входных сигналов S*, Rk (00, 01, 10 и 11) для двух
предшествующих состояний (£ / ' = 0 и £/ ' = 1).
=> Если на входы триггера подать нулевые сигналы S* = Rk = 0, то тран­
зисторы VTS , VTR будут заперты и состояние триггера не изменится,
т.е. g * = ( f '. Нулевые сигналы на обоих входах соответствуют со­
стоянию (режиму) хранения.
=> При подаче на входы триггера сигналов S* = 1, Л* = О транзистор VTS
отпирается, a VTR запирается, поэтому происходит установка триггера
в состояние
= 1 независимо от предыдущего состояния
(режим
установки).
=> При подаче на входы триггера сигналов 5* = 0, R k~l = 1 происходит его
установка в состояние £?* = 0 независимо от предыдущего состояния
£7*“' (режим сброса).
=> При подаче входных сигналов 5* = Rk = 1 транзисторы будут нахо­
диться в открытом состоянии, которое соответствует б* = Q K = 0 не­
зависимо от предыдущего состояния триггера и не фиксирует инверсность его выходных сигналов. Если теперь на оба входа триггеров од­
новременно поступят нулевые сигналы S* = R k = О, то транзисторы
VTS, VTR запираются (отключаются). Бистабильная ячейка на транзи­
сторах VT\, VTi не может находиться в состоянии Q* = Q * и «опроки­
нется». При этом состояние триггера окажется неопределенным. По­
этому комбинация входных сигналов 5* = Rk = 1 является запрещенной
( запрещенный режим).
Таблицы
с о с т о я н и й . Приведенному словесному описанию
работы триггера соответствует табл. 1, которая называется полной таблицей
состояний (переключений) триггера. В ней для двух возможных предшест­
вующих состояний триггера (£/“' = 0 и
1 = 1) приведены состояния 0 *
после подачи на его входы каждой из 4-х возможных комбинаций входных
сигналов S*, Rk, а также указаны названия режимов работы (состояний) триг­
гера. Таблица 1 используется в дальнейшем для построения логических схем
асинхронных ЛЗ-триггеров. Поэтому символом Ф в столбце для
обозна­
чены 0 или 1, так как запрещенный режим триггера никогда не используется
и
может принимать любые значения.
Таблица 1
R"
5*
0
0
0
1
1
0
1
1
0
М
0
0*
0
1
1
0
1
1
1
0
0
1
0
0
1
ф
ф
Режим
хранения
установки 1 (установки)
установки 0 (сброса)
запрещенный
Из табл. 1 видно, что изменение исходного состояния (переключение)
триггера зависит не только от комбинации входных сигналов, но и от его
предыдущего состояния. Например, если триггер находился в состоянии
= 1, то комбинация входных сигналов 5* = 1, R k = 0 не изменяет его
состояния; в противном случае (при ( f ' A = 0 ) состояние триггера изме­
нится. 3 комбинационных устройствах комбинация сигналов на входе
однозначно определяет значения сигналов на выходе.
Таблица 2
Rk
S*
0
0
&
р*-|
Таблица 3
0
R1
Ф
0
'->0*
0 ^ 0
0
1
1
0-> 1
1
1
0
0
1 ->0
0
1
1
1
-
1 -> 1
ф
0
Обычно для описания триггеров пользуются сокращенным вариантом
таблицы состояний (табл. 2 ).
Кроме таблицы состояний для описания работы асинхронного /^-триггера
использ/ется таблица переходов (табл. 3), в которой приводятся все возмож­
ные изменения состояний (переходы) триггера и комбинации входных сигна­
лов для их реализации. Например, в первой строке табл. 3 указан переход
триггера из предшествующего состояния $ А = 0 в состояние £/ = 0 (0 —» 0 ).
Такой переход реализуется при двух комбинациях входных сигналов: 5*= 0,
Rk = 0 (режим хранения) и 5* = 0, Rk = 1 (режим установки 0). При переходе
0 —> 0 сигнал Rk может принимать любые значения, поэтому в табл. 3 его зна­
чение обозначено символом Ф.
Временные
д и а г р а м м ы . Работу триггера можно также
описать с помощью временных диаграмм, позволяющих для любой
последовательности комбинаций входных сигналов отобразить изме­
нения его выходных сигналов (состояний триггера). В качестве при­
мера на рис. 3 приведены временные диаграммы для заданной после­
довательности комбинаций входных сигналов S (t) и R (t), подаваемых
на каждом такте (временном интервале). Над временными диаграмма­
ми цифрами указаны порядковые номера к тактов. Цифра 0 соответст­
вует исходному состоянию триггера ( Q = 0, Q = 1), в котором на его
входы поданы сигналы S = R = 0. Под временными диаграммами ука­
заны режимы: 0 — хранения 0 ; 1 — хранения 1 ; 0 —»1 — установки 0 в 1 ;
1 —>1 — установки 1 из 1 ; 1 —» 0 — установки из 1 в 0 ; 0 —» 0 — уста­
новки О из 0; ЗР — запрещенный режим, ? — неопределенное состоя­
ние. Напомним, что режим триггера определяется состоянием прямого
^-выхода.
Для построения зависимостей выходных сигналов Q (t), Q ( t ) на от­
дельных тактах можно использовать схемы триггера, приведенные на
рис. 2,а,б, или изложенный выше материал по описанию работы триггера
для различных комбинаций входных сигналов.
Из рис. 3 видно, что:
=> независимо от исходного состояния триггера (Q = 0 или Q = 1) при
подаче комбинации входных сигналов S = 1, R = 0 триггер устанавли­
вается в единичное состояние или сохраняет его (такты 1 и 3); при по­
даче комбинации входных сигналов S = О, R = 1 триггер устанавлива­
ется в нулевое состояние или сохраняет его (такты 5 и 7);
=> если триггер находился в нулевом состоянии, то при установке 1
(комбинация входных сигналов S = 1, R = 0 — такт 1) скачала появля­
ется нулевой сигнал на инверсном выходе Q , а затем — единичный
сигнал на прямом выходе Q триггера;
=> если триггер находился в единичном состоянии, то при установке О
(комбинация входных сигналов S = О, R - 1 — такт 5) сначала появля­
ется нулевой сигнал на прямом выходе Q, а затем — единичный сиг­
нал на инверсном выходе Q триггера.
к
S
1
0
:
R
Q
/—
2
3
!
4
о —>
5
1
1
1
i
:
I1
Г....—
!—
1
—
1
—
к
1
1
j
!
I1
1
1
1
1
!
1
i
1
i i->
1
:
1
6
7
8
! i-*oi
!
9
1
t
......... 1
t
1
1
1
i
1
1
к
0
:
1
1
1
i
1
Q
!
1
1
1
:
1
1
i
4
о
o->oj
3P
i
t
?
t
Рис. 3. Описание работы асинхронного Лб'-триггера на элементах И Л И — Н Е
с помощью временных диаграмм
Асинхронный /?5-триггер на элементах И— НЕ. Последовательное
включение дополнительных транзисторов VT& VTR с основными транзистора­
ми VTh VT2 бистабильной ячейки памяти (рис. 4,а) соответствует схеме асин­
хронного /й-триггера на логических элементах И— НЕ (рис. 4,6). Условное
графическое обозначение триггера приведено на рис. 4,в. Отметим, что вход­
ные сигналы триггера на рис. 4,а,б представлены в виде инверсных величин
S к , R к, а входы в условном графическом обозначении триггера помечены
кружочками. Ниже обоснована необходимость таких обозначений.
О п и с а н и е р а б о т ы т р и г г е р а . Пользуясь рис. 4,а, можно
выявить (так же как и для триггера на элементах ИЛИ— НЕ) режимы работы
(состояния) триггера после подачи на его вход четырех возможных комби­
наций входных сигналов S k, R k (00, 01, 10 и 11) для двух предшествую­
щих состояний ((/~‘ = 0 и
= 1) и составить таблицу состояний (табл. 4)
для асинхронного ^S-триггера на логических элементах И— НЕ.
«)
б)
Рис. 4. Принципиальная (а) и логическая (б ) схемы асинхронного /^-триггера
на элементах И— НЕ и его условное графическое (в)
Таблица 5
Таблица 4
Rk
sk
&
Режим
Я*
1
1
0 *“ '
хранения
0
5*
0
0
0 -\
*
1
0
1
установки 1
0
1
1
0
1
0
установки 0
1
0
0
0
0
-
запрещенный
1
1
-
Воспользуемся табл. 4 для обоснования необходимости введения инверсно­
го обозначения входных сигналов. Если от инверсных входных сигналов, при­
веденных в табл. 4, перейти к прямой форме их записи, то получим таблицу
состояний (табл. 5) для рассмотренного выше асинхронного Л5-тригтера на
логических элементах ИЛИ— НЕ. Следовательно, введение обозначения ин­
версных входных сигналов независимо от типа используемых в триггере ло­
гических элементов позволяет считать комбинацию входных сигналов:
=> 5* =0, Rk =0, соответствующей режиму хранения;
=> S* = 1, Rk =0 — режиму установки 1, или установки триггера;
=> S* =0, Rk=1 — режиму установки 0, или сброса триггера;
=> S* =0, Rk= 1— запрещенному режиму.
Для схемного «опознания» асинхронного /^’-триггера на логических
элементах И— НЕ в его условном графическом обозначении (рис. 4,в)
входы помечены кружочками, что свидетельствует о необходимости по­
дачи инверсных сигналов по отношению к указанным на рисунке S, R.
Составление структурных формул. Полученная выше полная таб­
лица состояний Л5-триггера (табл. 1 ) определяет правила его функцио­
нирования. Покажем, как можно использовать эту таблицу, представ­
ленную в виде табл. 6 , для построения логических схем асинхронных
ЛЗ'-триггеров на логических элементах И Л И — НЕ и И— НЕ. Будем по­
лагать, что табл. 6 описывает комбинационное устройство с тремя вхо­
дами R k, Sk, £?* 1 и одним выходом (/. Перенесем из табл. 6 на карты
Карно значения выходных сигналов
(рис. 5), при этом для получения
структурной формулы комбинационного устройства:
Таблица 6
1
Входы
Rk
5*
0
0
0
Выход
0*
0
0
1
1
0
0
1
2
0
1
0
1
3
0
1
1
1
4
1
0
0
0
5
1
0
1
0
6
1
1
0
ф
7
1
1
1
ф
=> в минимальной конъюнктивной форме на карту переносятся значения
выходного сигнала 0*, равные 0 и Ф (как 0);
=> в минимальной дизъюнктивной форме на карту переносятся значения
выходного сигнала £?*, равные 1 и Ф (как 1).
Пользуясь изложенными в главе 13 правилами минимизации не пол­
ностью определенных логических функций с помощью карт Карно, по­
лучаем следующие структурные формулы:
(1)
Q k= R k(S k+ Q k ' ) = R k + S k + Q k~] — минимальная конъюнктивная
форма;
(2)
Q k=Sk+ R kQ k- [ = S kR kQ k- 1 — минимальная дизъюнктивная форма.
Минимальная дизъюнктивная
нормальная ф ор м а
Минимальная конъюнктивная
н о рм ал ь н ая ф о р м а
Рис. 5. Карты Карно для получения минимальных дизъюнктивной
и конъюнктивной нормальных форм выходного сигнала
Построение схем триггеров.
На основании (1), (2) построим
структурные схемы комбинацион­
ных устройств в базисе И Л И -H E и
И -Н Е. Соединив выход Q каждо­
го комбинационного устройства с
входом б*-1, получим логические
схемы асинхронных /^-триггеров
(рис. 6 ).
Рис. 6 . Схемы асинхронных RSтриггеров на логических элементах
ИЛИ—НЕ (а) и И— НЕ (б)
Синхронные ЛУ-триггеры. Синхронные ftS-триггеры имеют дополни­
тельный С-вход для подачи управляющих (тактовых, синхронизирующих)
импульсов, под действием которых происходит изменение их состояния.
Сигналы на информационные S- и /?-входы выставляются до подачи синхро­
импульса. Синхронные триггеры строят по одноступенчатой и двухступен­
чатой схемам.
Для построения о д н о с т у п е н ч а т о г о синхронного ^S-триггера
на входе его асинхронного аналога достаточно включить два логических
элемента. Схема такого триггера с использованием логических элементов
И— НЕ и его обозначение приведены на рис. 7. Рассмотрим принцип работы
синхронного триггера.
При С = 0 независимо от состояния информационных S- и /{-входов на
выходах логических элементов формируются сигналы S = R = 1, при кото­
рых асинхронный триггер находится в режиме хранения (табл. 4). При С = 1
оба логических элемента открыты, и асинхронный триггер реагирует на все
разрешенные комбинации сигналов, поступающих на S- и Л-входы.
&1
5
,' о
в
>R
Q
с
а)
R
б)
Рис. 7. Схемы одноступенчатого синхронного ftS-триггера (а)
и его условное графическое обозначение (б )
Двухступенчатые
триггеры реализуются по схеме веду­
щ и й — ведомый. Занесение информации в триггер разделено во вре­
мени: вначале информация записывается в первую ступень, а затем
переписывается во вторую. На рис. 8 приведен вариант схемы, наибо­
лее доступный для понимания принципа работы двухступенчатого R S триггера, а также условное обозначение двухступенчатого синхронно­
го триггера.
В схеме на рис. 8 ,а использованы два синхронных Л1,S'-триггера и ин­
вертор. При С = 1 производится запись информации в триггер Т\, триггер
Т2 заблокирован и находится в режиме хранения, так как на его С-вход
через инвертор подается нулевой сигнал. При С = 0 блокируется Th на
С-вход Т2 поступает единичный сигнал, и информация с выхода Т, пере­
писывается на выход Т2.
Рис. 8 . Схема двухступенчатого синхронного Л5-триггера с инвертором (а)
и его условное графическое обозначение (б)
На рис. 9 приведен вариант схемы двухступенчатого триггера с за­
прещающими связями между отдельными ступенями. При С = 1 в про­
цессе записи информации (т.е. при комбинациях входных сигналов 5 = 1 ,
R = 0 или 5 = О, R = 1) в первый триггер Г, на выходе одного из логиче­
ских элементов 1 или 2 фиксируется нулевой сигнал. Поэтому на выхо­
дах логических элементов 3 и 4 формируются единичные сигналы, под
действием которых триггер Т2 находится в режиме хранения. При С = О
или входных сигналах 5 = 0, R = 0 на выходах элементов 1, 2 фиксиру­
ются сигналы 5 = R = 1, поэтому триггер Т\ находится в режиме хране­
ния, элементы 3 и 4 открыты и информация с выхода Т\ переписывается в
триггер Т2.
Рис. 9. Схема двухступенчатого синхронного Л5-триггера
с запрещающими связями между отдельными ступенями
Следует отметить, что:
=> запись информации (появление ее на выходе) в двухступенчатые
триггеры происходит по срезу (при изменении из 1 в 0 ) входного син­
хроимпульса, т.е. с задержкой на длительность синхроимпульса;
=> в двухступенчатых триггерах отсутствует прямая связь м еж ду вхо­
дом гг выходом, так как всегда какая-то одна из его ступеней находит­
ся в режиме хранения. Поэтому двухступенчатые триггеры устойчиво
работают при наличии обратной связи. Обратные связи используются
при п остроении рассматриваемых ниже Т- и Ж-триггеров.
/)-тр*птеры с потенциальным управлением. Один из способов уст­
ранения недостатка ЛЛ’-триггеров — наличие запрещенной комбинации
входных, сигналов — приводит к D-триггерам. В D-триггерах запрещен­
ная комбинация исключается путем соединения S- и /f-входов синхрон­
ного Л5-триггера через инвертор (рис. 10,а). D-триггеры имеют один ин­
формационный D-вход и С-вход для подачи синхроимпульсов. При этом
на информационные входы Л,S'-триггера никогда не поступает одинако­
вых сигналов, г.е. исключается не только запрещенная комбинация
(S = R =
1), но и режим хранения (S = R = 0), который реализуется путем
подачи С7 = 0. На рис. 10,6 приведено условное графическое обозначение
D-триггера, а в табл. 7 — правила его работы.
В D-триггерах задерживается прохождение входного сигнала на выход
схемы д о появления синхроимпульса, поэтому их называют триггерами за­
держки. По выполняемым функциям они не отличаются от синхронных
/^-триггеров, однако имеют меньшее число входов. Указанное обстоятель­
ство послужило основанием для изготовления D-триггеров в виде микро­
схем. Другой возможный вариант схемного решения D-тригтера с меньшим
количеством логических элементов показан на рис. 10,в. Этот D-триггер по­
строен н а основе синхронного /{^-триггера (рис. 7,а), в котором внешний
R-вхоа подключен к внутреннему S -входу асинхронной части триггера.
D
С
D
S
С
Т
D
Т
о—
С
С
б)
в)
Рис. 1 0. Схема D -триггера с включением инвертора между информационными
входамги синхронного D S-триггера (а), его условное графическое обозначение (б )
и вариант схемы с минимальным числом логических элементов (в)
О /^-триггерах с динамическим управлением . Особенностью
рассмотренных выше синхронных триггеров со статическим управле­
нием является то, что они могут изменять свое состояние во время
действия синхроимпульса С = 1 при изменении входных информаци­
онных сигналов. Это обусловлено тем, что при С = 1 открыт доступ
информационным сигналам к асинхронной части синхронных тригге­
ров. В частности:
=> синхронные Л.S’-триггеры при С = 1 будут изменять свое состояние,
если поочередно изменять комбинации входных сигналов S = 1, R = 0
и S = 0, R = 1;
=> D -триггеры при С = 1 также будут изменять свое состояние, если по­
очередно подавать на вход сигнал D = 1 и D = 0.
Поэтому при занесении информации (записи 0 или 1) в триггер со ста­
тическим управлением информационные сигналы должны оставаться
неизменными в течение времени действия сигнала С = 1 иа входе син­
хронизации. Один из способов устранения указанного недостатка состоит
в использовании для переключения состояния триггера н е постоянного
уровня синхроимпульса С, а его изменения из 0 в 1 или из 1 в 0. Тригге­
ры, реализующие такой способ записи информации, называются тригге­
рами с динамическим управлением [29].
Триггер с п о т е н ц и а л ь н ы м
управлением часто называют
триггером, тактируемым импульсом, или триггером-защелкой, а триг­
гер с д и н а м и ч е с к и м
управлением — триггером, тактируемым
фронтом (срезом), или счетным триггером.
Схемны е и функциональны е особенности Г-триггеров. Эти триг­
геры представляет собой последовательностные устройства с единствен­
ным входом, на который поступают тактовые импульсы. Каждый такто­
вый импульс изменяет состояние триггера на инверсное.
Основой для построения Г-триггеров могут служить двухступенчатые
синхронные /fS-триггеры (рис. 11,а), в которых для изменен ия состояния
триггера на инверсное используются собственные выходные сигналы. При
этом инверсный Q -выход триггера должен быть соединен с S'-входом, а
прямой g -выход — с ^-входом триггера. Так как появлени е сигнала на
выходе двухступенчатого триггера задерживается на время действия так­
тового импульса (при Т - 1 вторая ступень заблокированаЭ, изменение
состояния (переключение) Г-триггера происходит по срезу тактовых им­
пульсов. Эта особенность отражена на временных диаграммам (рис. 11,б).
На рис. 11,в приведено условное графическое обозначение Г-триггера.
1* = О
Правила его работы указаны в табл. 8, из которой следует, что при
i
триггер сохраняет предыдущее состояние
, а при Т* = 1 — изменяет
предыдущее состояние на инверсное Q **'.
Табл.8
1*
Qk
0
Q k~'
1
g k-\
1
а)
б)
ТТ
—
h
Рис. 11. Схема Г-триггера, построенная на основе двухступенчатого
синхронного Л5-триггера (а), временные диаграммы (б), иллюстрирующие
выполняемые Г-триггером функции и условное графическое обозначение
Г-триггера (в)
Покажем другую возможность реализации Г-триггера. Из табл. 7 сле­
дует, что D-триггер при С* = 7*. D^~* = Q k~] будет работать по правилам
Г-триггера (табл. 8). Поэтому, соединив инверсный Q -выход D-триггера
с его D-входом, получим схему Г-триггера. В отличие от двухступенча­
тых структур переключение триггера происходит не по срезу, а по фрон­
ту тактовых импульсов.
Обратное преобразование Г-триггера в D-тригтер невозможно без разры­
ва соединений внутри схемы и использования внутренних точек схемы.
УА'-триггеры. Второй способ устранения недостатка /?5-триггеров —
наличие запрещенной комбинации входных сигналов — приводит к
УА'-триггерам. Если в D-триггерах запрещенная для /?5-триггеров комби­
нация не используется (исключается путем соединения через инвертор
S- и /{-входов синхронного /fS-триггера), то в У/С-триггерах запрещенная
комбинация используется в полезных целях: при этой комбинации вход­
ных сигналов Ж-триггер работает как Г-триггер.
.Ж-триггеры могут быть построены двумя равноценными способами:
=> на основе двухступенчатых синхронных Л5-триггеров путем создания
условий для инверсного (тактируемого) режима при запрещенной
комбинации;
=> на основе Г-триггеров путем создания двух дополнительных входов
для управления состоянием выходов.
а)
Рис. 12. Схема Ж-триггера, построенная на основе
двухступенчатого синхронного ^S-триггера (а)
и его условное графическое обозначение (б)
Рассмотрим первый способ, взяв за основу двухступенчатый син­
хронный Л5-триггер, изображенный на рис. 9. Если в первой ступени ис­
пользовать трехвходовые логические элементы, а дополнительные входы
задействовать для организации обратных связей, как в Г-триггере, то по­
сле переименования информационных входов R, S на J, К получим схему
Ж -триггера, которая приведена на рис. 12,а. При трех комбинациях
входных сигналов (J = К = 0; J = 1, К = 0; J = 0, К = 1) ,/ЛГ-триггер вы­
полняет функции Л5-триггера, т.е. обратные связи не оказывают влияния
на его работу. Покажем, что это так для комбинации J = 1, К = 0 (режим
записи 1). Если триггер находился в нулевом состоянии (Q = 0), то на
третьи входы элементов 1 и 2 подаются сигналы J = Q = 1 , K = Q = 0 k b
триггер запишется 1. Если же триггер находился в единичном состоянии
(Q = 1X то на входы первой ступени поступают единичные сигналы и она
находится в режиме хранения. В этом случае Ж-триггер сохраняет еди­
ничное состояние. При комбинации J = К = 1 Ж-триггер выполняет
функции Г-триггера (J - и ЛТ-входы триггера можно исключить, так как на
элементы умножения 1 и 2 подаются единичные сигналы). Условное гра­
фическое обозначение JK -триггера показано на рис. 12,6.
Особенности интегральны х триггеров. В интегральном исполнении
выпускают три типа триггеров: RS-, D- и Ж-триггеры. Это обусловлено
возможностями:
=> построения четвертого типа триггеров — Г-триггеров — на основе
RS-, D-, Ж -триггеров (рис. 13,а,б,в,г);
=> взаимного преобразования триггеров. На рис. \4,а,б,в соответственно пока­
заны схемы преобразования RS- и Ж-триггеров в £)-триггер; Л5-триггера в
Ж-триггер.
J
—
ТТ
_Q
Ъ
Т— Гк
г)
Рис. 13. Схемы Г-триггеров, построенные на основе Л5-триггера (а),
D-триггеров (б, в) и Ж-триггера (г)
Как правило, в микросхеме объединяется несколько триггеров, кото­
рые имеют общие выводы цепей питания и управления. На многотриг­
герных микросхемах можно строить более сложные последовательност­
ные устройства: регистры, счетчики, делители частоты, сверхоператив­
ную память и др. По этой причине интегральные триггеры снабжены
асинхронными RS-входами для начальной установки триггера в требуе­
мое состояние. Асинхронные входы по отношению к другим входам
триггера обладают приоритетом. Это означает, что при активизации
асинхронных входов другие входы триггера блокируются и поданные на
них сигналы не оказывают воздействия на триггер. Наиболее часто на
асинхронные входы подают инверсные сигналы. Комбинация сигналов
S = О, R = 1 соответствует режиму записи 1 на g -выход триггера; комби­
нация S = 1, R = 0 — режиму записи 0. При этих комбинациях сигналов
действие других входов триггера заблокировано. При 5 = 1, R = 1 блоки­
ровка снимается, и триггер управляется по своим основным входам.
Комбинация S = 0 , R = 0 запрещена.
^ T ~ ,s
D
ТТ
N
а)
~_2
' h&
с
к
LW
0
Q
Гс
&
б)
ТТ
S
р
г
в)
Рис. 14. Схемы О-триггеров, построенные на основе /?5-триггера (а)
и Ж-триггера (б); схема .Ж-триггера (в),
построенная на основе &5-триггера
=>
=>
=>
=>
В справочной литературе по триггерам обычно приводятся:
функциональная схема и краткое описание правил функционирования
триггера;
таблица режимов (состояний) триггера;
условное графическое обозначение, расположение и назначение вы­
водов;
статические и динамические параметры.
14.2. Регистры
Назначение регистров. Р е г и с т р о м называют выполненное на триг­
герах того или иного типа последовательностное устройство, основной
функцией которого является хранение информации в виде /'/-разрядного
двоичного кода. Двоичный код фиксируется на N триггерах. Занесение
новой информации в регистр из внешнего устройства называется опера­
цией записи (записью), вывод информации из регистра во внешнее уст­
ройство — операцией считывания (считыванием). Обмен информацией
между регистром и внешними устройствами может происходить в парал­
лельном или (и) последовательном коде. В первом случае все разряды
кода записываются и считываются одновременно, во втором случае —
последовательно во времени, разряд за разрядом.
Классификация регистров. По способу з а п и с и / с ч и т ы в а ­
н и я и н ф о р м а ц и и различают:
=> параллельные регистры, в которых запись и считывание выполняются
в параллельном коде: при записи операнда все биты одновременно
поступают в триггеры регистра, при считывании — одновременно
выводятся во внешнее устройство;
=> последовательные регистры, в которых запись и считывание выпол­
няются в последовательном коде. В процессе записи данные заносятся
в триггеры последовательно во времени бит за битом, при считыва­
нии также бит за битом выводятся из регистра;
=> параллельно-последовательные регистры, в которых при записи все
биты данных поступают в регистр одновременно (в параллельном ко­
де), а при считывании покидают регистр бит за битом (в последова­
тельном коде). Параллельно-последовательные регистры являются
преобразователями параллельного кода в последовательный;
=> последовательно-параллельные регистры, в которых запись выполня­
ется в последовательном коде, а считывание — в параллельном. По­
следовательно-параллельные регистры являются преобразователями
последовательного кода в параллельный.
По ф у н к ц и о н а л ь н о м у п р и з н а к у регистры разделяют
на две большие группы:
=> регистры хранения, выполняющие только одну — основную функцию;
=> регистры сдвига, выполняющие, помимо хранения, сдвиг информации
вдоль регистра. Среди регистров этой группы выделяют реверсивные
регистры, позволяющие сдвигать информацию в обе стороны.
С помощью операции начальной установки триггеры регистра могут
быть установлены в требуемое исходное состояние.
П араллельны е регистры. Параллельные регистры имеют N информа­
ционных входов Хп и выходов Y„(n = 0, 1, 2,..., N - 1), вход С] записи и вход
С2 считывания. Основное их назначение — хранение информации. На рис. 1
изображена схема /V-разрядного параллельного регистра на /^-триггерах.
Рис. 1. Схема параллельного регистра
П р а в и л а р а б о т ы регистра приведены в табл. 1. Запись ин­
формации осуществляется путем подачи сигнала Ci = 1 (С2= 0) на вход
записи, а считывание — сигнала С2 = 1 (С) = 0) на вход считывания. Все
разряды данных записываются и считываются одновременно.
Таблица 1
Д7-Й ВЫХОД
Входы
триггера
регистра
х„
Qn
Y„
QV
\r А
’-!
ЛП
0
Хранение
0
Запись
qh~'
Qt~'
Считывание
хк
„~'
хк
„-'
Передача
С,
0
О
ф
0
1
■ук—
1
Лп
1
О
ф
1
1
Т
с2
Режим
При С \ —С2- 0 триггеры регистра сохраняют информацию Q k 1 преды­
дущего (к - 1)-го такта, сигналы Х к~' на входах триггеров могут принимать
значения 0 или 1 (символ Ф), а сигналы с их выходов не проходят через схе­
мы совпадения И. В режиме хранения с выходов Y„ регистра снимаются сиг­
налы с нулевым уровнем. При необходимости изменением схемы можно
получить единичный уровень выходных сигналов в этих режимах.
При С | = 1, С2= 0 происходит запись информации в регистр, входные
сигналы Х к~[ (п = 0, ... /V) поступают в триггеры Т0+ Тц-\. В режиме за­
писи с выходов Y„ регистра снимаются сигналы с нулевым уровнем.
При С] =0, С2= 1 регистр переходит в режим считывания, открываются ло­
гические элементы И и хранимые в триггерах сигналы Q k„~' считываются на
выход регистра Y* = Q*~*. Триггеры Т0+
находятся в режиме хранения.
В режимах хранения и считывания состояние информационных вхо­
дов Х„ может быть любым (Ф = 0 или 1). Следовательно, в этих режимах
можно производить установку входных сигналов X .
При С\ = С г~ 1 регистр работает в режиме асинхронной передачи
(трансляции) входных сигналов. В ряде случаев такая комбинация вход­
ных сигналов является запрещенной.
П оследовательные регистры. Последовательные регистры имеют
один информационный вход X и один выход Y, вход С запи­
си/считывания, вход R начальной установки триггеров регистра в нуле­
вое состояние (сброса). При записи и считывании осуществляются пере­
мещение (сдвиг) информации вдоль регистра. Поэтому последовательные
регистры часто называют сдвигающими. Схема Л'-разрядного регистра,
построенного на .D-триггерах, приведена на рис. 2.
ТЗ
То
TZ ;
т„
Q-
Тц-\ Q n -1-Y
— q>c
4s_
Рис. 2. Схема последовательного регистра
Правила
р а б о т ы Л'-разрядного регистра отражены в табл. 2.
При этом следует иметь в виду, что п = 1,..., TV—1, выход Q„ при n = N —1 яв­
ляется выходом регистра (рис. 2). Особенности основных режимов регистра:
=> сброс регистра производится сигналом R = 0, при этом состояние тактово­
го С и информационного X входов может быть любым (Ф = 0 или 1). На
выходах всех триггеров устанавливается нулевой сигнал (Qa = Q„ = 0);
=> при R = 1, С4= 0 регистр находится в режиме хранения, в котором на
выходах триггеров сохраняются сигналы (2о~', Q k„ 1, поступившие на
предыдущем такте. Состояние информационного входа X может быть
любым. Поэтому подлежащий записи входной сигнал Х к следует ус­
танавливать в этом режиме, так как состояние входов триггеров
7о + 7jv-i не влияет на их выходы;
=> для записи информации следует подать сигнал С*= 1. П ри этом уста­
новленный ранее входной сигнал Х к~' появится на выходе Q q тригге-
ра Го. На выходе Q„ триггера Т„ появится сигнал Q kn_\ с выхода тригге­
ра Т„_ь который был записан на ( к - 1)-м такте. При С*= 1 можно од­
новременно записывать, сдвигать и считывать информацию.
Таблица 2
R
0
1
1
Входы
С
Ф
Выходы триггеров
Режим
X
Оо
Q*
ф
ф
0
0
0
еГ
а*4
Сброс
Хранение
1
Л'*-1
Х к-'
e ll
Запись-сдвиг-считывание
Параллельно-последовательные регистры. Регистры этого типа име­
ют N информационных входов Х„ (п = 0, 1, 2,..., N) и один прямой выход Y,
вход С] записи и вход Ci считывания. Их называют также сдвигающими р е­
гистрами с параллельной загрузкой. На рис. 3 приведена схема ^-разрядного
регистра на ЖЛЗ’-триггерах. Его о с о б е н н о с т ь состоит в том, что
при построении регистров используются триггеры с двумя входами записи:
=> асинхронные входы S, R с двумя логическими элементами И-НЕ задей­
ствованы для построения D-триггера. Они используются в режиме записи;
=> JAT-входы задействованы для построения последовательного регистра
и используются при считывании данных.
Правила
р а б о т ы параллельно-последовательного регистра
отражены в табл. 3. При этом следует иметь в виду, что п = 1, ..., N — 1,
выход триггера Q„ при n = N - 1 является выходом регистра (рис. 3). За­
пись информации в триггеры осуществляется по асинхронным
ЛS'-входам, а ее сдвиг — по информационным .Ж-входам. При считыва­
нии информации освобождающиеся разряды регистра заполняются ну­
лями. Комбинация С\= С2- 1 является запрещенной.
При Ci = С2 = 0 регистр работает в реж име хранения. На выходах всех
триггеров регистра сохраняются значения сигналов (&-1)-го такта.
Таблица 3
Выходы триггеров
Входы
Режим
хя
Ро
Qn
0
с,
0
Ф
Qn
k'
Хранение
0
1
х к
п- ]
Qo~'
у к-\
Л0
Х к~х
Запись
1
0
ф
0
Q„~'
Считывание
С-,
При Ci = 1, С2 = 0 регистр работает в режиме записи, так как открывают­
ся схемы совпадения И, и установленные на (к - 1)-м такте входные сигналы
Х к~' по асинхронным входам записываются в триггеры регистра.
При С, = 0, С2 = 1 регистр работает в реж име считывания, в котором
на С-входы триггеров подаются единичные сигналы. При этом в первый
триггер записывается логический 0, на выходы последующих триггеров
переписываются сигналы с выходов предыдущих, а выходной сигнал Y
последнего (N - 1)-го триггера «покидает» регистр.
Комбинация сигналов С, = 1, С2 = 1 является запрещенной.
Установку входных сигналов Х к~1 можно производить в режимах хра­
нения и считывания, так как в этих режимах схемы совпадения И закрыты.
Последовательно-параллельные регистры. Эти регистры имеют один
информационный входД N прямых выходов Y„(n = 0,1,2,3,..., N - 1), вход R
начальной установки, вход С\ записи и вход С2 считывания. Они являются
сдвигающими регистрами с параллельным считыванием. В качестве примера
на рис. 4 приведена схема jV-разрядного регистра на JATfS-триггерах. Включе­
ние между J- и А'-входами инвертора переводит Ж-триггер в D-режим. Для
организации режима считывания используются логические элементы 2И, на
которые подаются сигналы считывания С2.
Правила
р а б о т ы регистра приведены в табл. 4. Следует
иметь в виду, что п = 1, ..., jV —1. Воспользовавшись табл. 4., рассмотрим
основные режимы работы регистра.
Таблица 4
Входы
R
с2
0
1
Ф
Выходы
0
С,
ф
0
ф
Qo~'
1
1
0
X -'
Х~х
1
0
1
ф
1
1
1
А*-1
Режим
X
Qo
Qn
у.
ф
0
0
а*4
0
0
Хранение
а* :.'
0
Запись
Q t'
Q „k~]
QV
Считывание
Х~[
Q tl
QV
Передача
Сброс
При R = О независимо от состояний других входов (С ь С2, X) все
триггеры регистра устанавливаются в нулевое состояние.
При R = 1, С\ = С2 = 0 регистр работает в режиме хранения. На выхо­
дах триггеров сохраняются сигналы Q ‘~' , Q *4 , поступившие на преды­
дущем такте. Состояние входа может быть любым (X = Ф).
Запись информации в регистр осуществляется последовательно разряд
за разрядом, как в последовательном регистре, а считывание за один
такт, как в параллельном регистре. Для записи и прямой передачи ин­
формации на выход регистра необходимо заранее установить входной
сигнал Х кЛ (в режиме хранения или считывания), после чего подать сиг­
налы С| = С2 = 1. Этот режим отличается от режима записи тем, что бла­
годаря открытым схемам совпадения информация сразу передается на
выход регистра и сдвигается на один разряд.
Реверсивны е регистры. На рис. 5
приведена схема /V-разрядного регистра,
построенного на D-триггерах с исполь­
зованием элементов 2И— ИЛИ— НЕ для
изменения направления сдвига инфор­
мации. В реверсивных регистрах реали­
зуется сдвиг информации вдоль триг­
герной линейки в обоих направлениях с
помощью управляющего сигнала Z.
Принцип
функциониро­
в а н и я . При Z = 1 открываются верхние
схемы И элементов 2И—ИЛИ—НЕ, и ин­
формация с помощью синхроимпульсов С
сдвигается от триггера Т\ к
При Z = О
открываются нижние схемы И элементов,
R
Рис. 5. Схема реверсивного
регистра
и информация сдвигается от T^-i к Т\. Правила функционирования реверсив­
ного регистра приведены в табл. 5. В реверсивных регистрах могут быть
реализованы различные способы записи и считывания информации. Напри­
мер, для параллельной записи можно задействовать асинхронные (устано­
вочные) входы триггеров, подключив к ним дополнительно логические эле­
менты (рис. 3). В этом случае вход X может быть использован для последо­
вательной записи данных в освобождающиеся при сдвигах разряды регист­
ра. В частности, по мере выполнения сдвигов при X = 0 младшие разряды
регистра будут заполняться нулями. Такие сдвиги называются логическими
и используются в микропроцессорных вычислительных устройствах.
Таблица 5
Выходы
Входы
R
0
Z
Ф
с
ф
ф
1
Ф
0
ф
1
0
1
1
1
1
Режим
Qo
Qn
Qn-]
0
0
0
Сброс
Хранение
Q t'
QV
Qn\
К"
fl*’1
QkJ
X „k~'
Сдвиг от TN-\
хГ
•yk—
\
Лп
Qt-1
Qn-2
СДВИГ ОТ Г0 К Гдг_1
к Го
14.3. Счетчики
Назначение счетчиков. С ч е т ч и к о м называют последовательност­
ное устройство, предназначенное для счета числа поступающих на его вход
импульсов и фиксации этого числа на N выходах в виде Л'-разрядного дво­
ичного кода. Основой для построения счетчиков служат триггеры. Состоя­
ние ( / , в которое переходит счетчик после А>го входного импульса, опреде­
ляется сигналами
,...,
на выходах триггеров. Счетчики работают по
циклическому принципу. Максимальное число К входных импульсов, после
которого счетчик возвращается в исходное состояние, называется к о э ф ­
ф и ц и е н т о м п е р е с ч е т а или м о д у л е м счета.
Классификация счетчиков. Для классификации счетчиков исполь­
зуют различные признаки.
По к о э ф ф и ц и е н т у п е р е с ч е т а различают:
=> двоичные счетчики, в которых коэффициент пересчета К = 2Ы
(Л'-= 1, 2, 3,...). Число разрядов N двоичных счетчиков равно числу
триггеров;
=> счетчики с произвольным коэффициентом пересчета К , среди кото­
рых выделяют десятичные счетчики с К = 10L (Ь = 1,2, 3,...).
По п о с л е д о в а т е л ь н о с т и
с ч е т а входных импульсов
счетчики разделяют на три группы:
суммирующие счетчики, в которых с приходом каждого входного им­
пульса в пределах счетного цикла к содержимому счетчика прибавля­
ется 1 (прямая последовательность счета);
=> вычитающие счетчики, в которых с приходом каждого входного им­
пульса в пределах счетного цикла содержимое счетчика уменьшается
на 1 (обратная последовательность счета);
=> реверсивные счетчики, в которых реализуются прямая и обратная по­
следовательности счета.
По с п о с о б у о р г а н и з а ц и и п е р е н о с а сигнала между от­
дельными триггерами выделяют:
=> счетчики с последовательным переносом, или асинхронные счетчики, в
которых входной импульс поступает лишь на первый триггер, а каждый
последующий триггер переключается выходным сигналом предыдущего,
т.е. входной импульс последовательно переносится на выход счетчика;
=> счетчики с параллельным переносом, или синхронные счетчики, в которых
входные импульсы поступают на все триггеры счетчика одновременно.
Рассмотрим принципы построения суммирующих, вычитающих и р е ­
версивных асинхронных счетчиков на примере трехразрядных устройств.
П р а в и л а р а б о т ы 3-разрядного двоичного счетчика можно
задать в виде таблицы состояний (табл. 1).
Таблица 1
1
2
3
4
5
6
к
02
0*
Qo
(0 с),0
02
0
1
2
3
4
5
6
7
0
1
1
1
1
0
0
0
и
1
2
3
4
5
6
7
8
7 0
у
0 34
1
IF
1
1
1 ^
0 щ
1
1^
и
0™1*
i^
1
т ш
1^
1С&
\ф
1
а*
1
1
0
Oes^
8
9
0о
( 0 b )w
7
6
5
1
ОЕгь
1<^
1
0
1<^
1<^
1<^
4
3
2
1
0
7
В столбце 1 табл. 1 указаны порядковые номера к входных импульсов,
или тактов, причем к = 0 соответствует начальному состоянию счетчика.
В столбцах 2+4 приведены значения сигналов на прямых ( Q kn ) выходах
триггеров счетчика, в столбцах 6+8 -— на инверсных ( Q k) выходах. Состоя­
ние счетчика после к-то импульса (включая начальное состояние при к = 0)
представляет собой двоичные числа, которые фиксируются на прямых
( Q i Q i Q o ) и инверсных ( Q i Q \ Q v ) выходах триггеров. Показанию сумми­
рующего счетчика соответствует состояние прямых выходов триггеров. Для
наглядности нулевое состояние выделено темным цветом, единичное —
светлым цветом. В столбце 5 табл. 1 приведены показания счетчика (Q kc ),0 в
десятичной системе счисления после к-то импульса. С поступлением К-то
(к = К = 8) импульса счетчик возвращается в начальное состояние
( Q l = Qc = 0 ). Начинается новый цикл счета. Цикличность счетчика обу­
словлена конечным числом используемых в счетчике триггеров. После 8-го
импульса счетчик должен зафиксировать 4-разрядное двоичное число 1000,
однако из-за отсутствия 4-го триггера фиксируется число ООО.
Двоичные суммирующие счетчики с последовательным перено­
сом. Для обоснования принципов построения воспользуемся табл. 1 с
учетом того, что:
=> показания счетчика снимаются с прямых выходов триггеров;
=> каждый триггер последующего, более высокого разряда Q k счетчика,
переключается выходным сигналом триггера предыдущего разряда Q k_ , .
Выявление
типа
используемых
триггеров.
Из столбцов 4, 3, 2 табл. 1 следует, что:
=> состояние Qq триггера 0-го разряда счетчика изменяет каждый к-й
входной импульс. Следовательно, триггером 0-го разряда должен
быть Г-триггер;
=> состояние Q \ триггера 1-го разряда счетчика изменяет каждый им­
пульс, поступающий с выхода триггера 0-го разряда, т.е. через каждые
два импульса, поступающих на вход счетчика. Следовательно, тригге­
ром 1-го разряда должен быть Г-триггер;
=> состояние Q\ триггера 2-го разряда счетчика изменяет каждый им­
пульс, поступающий с выхода триггера 1-го разряда, т.е. через каждые
четыре импульса, поступающих на вход счетчика. Следовательно,
триггером 2-го разряда также должен быть Г-триггер и т.д.
Таким образом, с функциональной точки зрения все триггеры счетчи­
ка должны быть Г-триггерами.
С точки зрения изменения состояния существует два типа Г-триггеров: с
переключением по с р е з у и по ф р о н т у счетного импульса. Так
как каждый последующий триггер счетчика переключается выходным
сигналом предыдущего триггера, выявим влияние вида выходного сигнала
(прямого, инверсного) на тип триггеров, используемых в счетчике.
Рассмотрим случай, когда для переключения последующих триггеров
используются сигналы, снимаемые с прямых выходов предыдущих тригге­
ров. Из 4-го и 3-го, 3-го и 2-го столбцов табл. 1 следует, что изменение со­
стояний триггеров 1-го и 2-го разрядов (сигналов Q *, Q* из 0 б 1 или из 1
в 0) происходит тогда, когда значения сигналов Qg , Q* на прямых выходах
триггеров 0-го и 1-го разрядов изменяются из 1 в 0 (показано стрелками).
Например, изменение сигнала £ > 2 из 0 в 1 и из 1 в 0 на прямом выходе (со­
стояния второго триггера) происходит с поступлением 4-го и 8-го входного
импульса, когда состояние первого триггера (сигнал Q ,*) изменяется из 1 в 0.
Таким образом, при снятии показаний счетчика с прямых выходов триггеров
и использовании для переключения триггеров также сигналов с прямых вы­
ходов в качестве триггеров 1-го, 2-го и 3-го разрядов необходимо использо­
вать Г-триггеры с переключением по срезу импульсов (из 1 в 0).
Рассмотрим другой случай, когда для переключения последующих
триггеров используются сигналы, снимаемые с инверсных выходов
предыдущих триггеров. Как видно из столбцов 8, 7 и 3, 2 табл. 1, из­
менение состояний (из 0 в 1 или из 1 в 0) первого и второго триггеров
происходит только в тех случая, когда сигналы на инверсных выходах
Qo>Q]k изменяются из 0 в 1. Таким образом, при снятии показаний
счетчика с прямых выходов триггеров и использовании для переклю­
чения инверсных выходных сигналов в качестве триггеров 1-го, 2-го и
3-го разрядов необходимо использовать Г-триггеры с переключением
по ф ронт у импульсов (из 0 в 1).
Построение
логических
схем
счетчиков.
В схемном отношении счетчик представляет собой цепочку, составлен­
ную из Г-триггеров. На тактовый вход первого триггера этой цепочки —
триггера 0-го разряда, подается счетная последовательность импульсов.
Показания счетчика снимаются с прямых выходов триггеров. Один из
выходов предыдущего триггера подключается к тактовому входу после­
дующего триггера.
Если использовать Г-триггеры с переключением по срезу входных
импульсов, то входной сигнал для и-го триггера следует снимать с пря­
мого выхода ( п - 1)-го триггера. Для этого случая на рис. 1 приведены
схема счетчика, в котором используются JA'-триггеры, и временные диа­
граммы, иллюстрирующие принцип его работы.
При использовании Г-тригтеров с переключением по фронту (из 0 в 1)
входной сигнал для «-го триггера необходимо снимать с инверсного выхода
(и-1)-го триггера. На рис. 2 изображены схема счетчика, построенного на
D-триггерах, и временные диаграммы, отражающие особенности его работы.
So
Г
J
ТТа
«Ус
к _ 1 Ч
<1
\к
Q1
ТТЛ— 1 —
:
J
Qi
.J
ТТ2
*1С
К
<
а)
о 1
5
С
Qo
Ci
о
Qi
1
100
ООО
001
010
Oil
1
1
110
101
1
111
ООО
б)
Рис. 1. Трехразрядный суммирующий двоичный счетчик
с последовательным переносом на .Ж-триггерах (а) и временные диаграммы (б),
поясняющие принцип его работы
В нижней строке временных диаграмм приведены показания счетчи­
ков в двоичных 3-разрядных числах после каждого к-го импульса.
Qо
С
Го
Ci
с
Рис. 2. Трехразрядный суммирующий двоичный счетчик с последовательным
переносом на D-триггерах (а) и временные диаграммы (б), поясняющие принцип
его работы
Особенности двоичного вычитающего счетчика. Правила работы
3-разрядного счетчика можно задать в виде таблицы состояний (табл. 2).
В столбцах 2+4 приведены значения сигналов на прямых ( Q „k ) выходах триг-
геров счетчика, в столбцах 6+8 — на инверсных ( Q *) выходах (и = 0, 1, 2).
Показанию вычитающего счетчика соответствует состояние прямых выходов
триггеров. В столбце 5 табл. 2 приведены показания вычитающего счетчика
(£?в)ю в десятичной системе счисления после Л-го импульса. Начальному
состоянию счетчика соответствует Q^Q^Ql =111 или Q % = 1 . После А^-го
импульса ( К= 8) счетчик возвращается в начальное состояние ( Ql =
= 7 ).
Таблица 2
1
2
3
4
к
0
1
2
3
4
5
6
7
8
Qi
а*
Qo
F*
1
1
1
0
0
0
0 ESN
1
0
1
0
(С?в)ю
7
6
5
*1 С *
4
3
0CN
2
£53:лЖ 2SSJ:
ОЕЗЗч
У€7
5
0
6
Ш
0
0
0
0
1
1
1
1
0 ^
7
8
9
Qx
Qo
(Qc)io
0
0
1
lesx
осх
0
1
0
1C5N
0с ?
1E8JV
0^
1С54
(к??
0<£?
(К ?
0
1
2
3
4
5
6
7
0
Для обоснования принципов построения использовались изложенный
выше подход и табл. 2 с учетом того, что:
=> показания счетчика снимаются с прямых выходов триггеров;
=> каждый триггер последующего, более высокого разряда Q kn счетчика,
переключается выходным сигналом триггера предыдущего разряда
&*-! *
Особенности
реализации
вычитающих
с ч е т ч и к о в состоят в следующем:
=> в вычитающих счетчиках (как и в суммирующих) должны быть ис­
пользованы Г-триггеры;
=> при снятии показаний счетчика с прямых выходов триггеров и ис­
пользовании для переключения триггеров также сигналов с прямых
выходов счетчик строится на Г-триггерах с переключением по фронту
импульсов (из 0 в 1);
=5- при снятии показаний счетчика с прямых выходов триггеров и ис­
пользовании для переключения триггеров инверсных выходных сигна­
лов вычитающий счетчик строится на Г-триггерах с переключением по
срезу импульсов (из 1 в 0).
На рис. 3 и 4 изображены схемы счетчиков, построенных на JK- и D-триггерах, а также временные диаграммы, отражающие особенности их работы.
&
О1
С
а
а
1
0
1
0
1
0
1
0
а
1
1
0
0
1
1
0
0
ёГ
1
1
1
1
0
0
0
0
1
111
110
101
100
011
010
001
ООО
111
а
б)
Рис. 3. Трехразрядный вычитающий двоичный счетчик с последовательным
переносом на .Ж-триггерах (я) и временные диаграммы (б),
поясняющие принцип его работы
Qi
Qo
Та
п
Ti
а)
3
4
5
011
010
с
Qo
а
а
1
111
1
1
110 101
1
1
100
001
000
111
110
б)
Рис. 4. Трехразрядный вычитающий двоичный счетчик с последовательным
переносом на D -триггерах (а) и временные диаграммы (6),
поясняющие принцип его работы
О возможностях использования инверсных выходов триггеров
для фиксации состояния счетчика. Принципы работы и построения
схем двоичных счетчиков рассматривались при условии, что для снятия
выходных сигналов счетчика используются п р я м ы е выходы тригге-
ров. Из столбцов 6-5-9 табл. 1 и 2 видно, что если выходные сигналы сни­
мать не с прямых, а с инверсных выходов триггеров, то:
=> в качестве вычитающих счетчиков могут быть использованы схемные
решения суммирующих счетчиков (рис. 1,а\ рис. 2,а);
=> в качестве суммирующих счетчиков могут быть использованы схем­
ные решения вычитающих счетчиков (рис. 3 ,а; рис. 4,а).
Особенности реверсивных счетчиков. В реверсивных счетчиках име­
ется дополнительный вход Z управления последовательностью (направлени­
ем) счета. При подаче сигнала Z = О или 1 на вход управления осуществляет­
ся коммутация выходов триггеров в соответствии со схемой суммирующего
или вычитающего счетчика. Обычно при Z = О составляется схема сумми­
рующего счетчика, при Z = 1 — схема вычитающего счетчика. Поэтому ре­
версивный счетчик должен содержать коммутационные узлы в виде комби­
национных схем, выполняющие функцию управления последовательностью
счета. Коммутационные узлы включаются между триггерами счетчика.
На рис. 5 приведена схема реверсивного 4-разрядного счетчика, в кото­
рой в качестве коммутационного узла использованы логические элементы
2И-ИЛИ. При Z = 0 открыты нижние схемы И логических элементов, в ре­
зультате чего реализуется схема суммирующего счетчика (см. рис. 2,а); при
Z = 1 открыты верхние схемы И логических элементов и реверсивный счет­
чик выполняет функции вычитающего счетчика (см. рис. 4,а).
Q)
То
С
Г
Q\
Qi
&
—
Qs
& 1
1
—С
—
Т3
-с г
6с
Г
&
Рис. 5. Трехразрядный реверсивный двоичный счетчик на Г-триггерах
с последовательным переносом
Основные особенности счетчиков с параллельным переносом.
В рассмотренных выше двоичных счетчиках с последовательным пере­
носом используются Г-триггеры, причем триггер следующего старшего
разряда переключается выходным сигналом триггера предыдущего
младшего разряда. Поэтому новое состояние счетчика может быть зафик-
сировано только после того, как сигнал переноса распространится через
все триггеры. Таким образом, счетчики с последовательным переносом
обладают низким быстродействием.
Один из возможных способов повышения быстродействия счетчиков
основан на одновременном переключении триггеров всех разрядов с
поступлением каждого счетного импульса. Этот способ реализуется в
счетчиках с параллельным переносом. Для построения таких счетчиков
применяют ГК-триггеры с разрешающим К-входом и вводят логические
элементы, обеспечивающие одновременное (параллельное) формирова­
ние сигналов переноса для всех разрядов. Сигналы переноса подаются
на F-входы триггеров, чтобы установить их в Г-режим, а счетные им­
пульсы — на Г-входы всех триггеров.
Таким образом, основные особенности счетчиков с параллельным пе­
реносом проявляются в том, что в них, в отличие от счетчиков с последо­
вательным переносом:
=> используются 7У-триггеры, имеющие дополнительный (разрешаю­
щий) F-вход для перевода триггеров в Г-режим;
=> вводятся логические элементы, обеспечивающие одновременное (па­
раллельное) формирование сигналов переноса для всех разрядов;
=> входные импульсы подаются одновременно на тактовые входы всех
триггеров.
Рассмотрим принципы построения суммирующих и вычитающих
счетчиков на основе .Ж-триггеров, в которых тактовым входом является
С-вход, а установка Г-режима осуществляется подачей единичного сиг­
нала на J- и А"-входы.
С у м м и р у ю щ и е с ч е т ч и к и . Из столбцов 2+4 габл. 1 видно,
что переключение последующего и-го триггера (и = 1, 2) из О в 1 или из 1
в 0 с поступлением очередного импульса происходит после того, как на
прямых выходах всех предыдущих триггеров устанавливаются единич­
ные сигналы, т.е.
(о
а*., =е^2=-=ео* =1Действительно, триггер первого разряда переключается, если триггер ну­
левого разряда установлен в единичное состояние, т.е.
= 1 (&= 1,3, 5,...);
триггер второго разряда переключается, если триггеры нулевого и перво­
го разрядов установлены в единичное состояние, т.е.
(к = 3, 7, ...) и т. д.
Перепишем условие (1) в виде
Q,* = Q* = 1
Для реализации условия (2) можно использовать логические элементы И
с числом входов М > 2. Сформированный в результате логического умноже­
ния единичный сигнал, дающий разрешение на переключение и-го триггера
при воздействии (&+1)-го входного импульса, следует подать на его инфор­
мационные J- и АГ-входы. Прямой выход триггера 0-го разряда непосредст­
венно соединяется с J- и К -входами триггера 1-го разряда. Триггер 0-го раз­
ряда должен всегда работать в Г-режиме (столбец 4, табл. 1). На рис. 6 изо­
бражена схема 4-разрядного суммирующего счетчика с параллельным пере­
носом, построенная по изложенному принципу, и временные диаграммы,
иллюстрирующие его работу.
во
— j
-г? с
ТТ0
Q\
тт.
гВ
Qi
вз
Q£,Q«
ТТ,
J
гс
К
7Т,
У
Рис. 6. Четырехразрядный суммирующий двоичный счетчик на .Ж-триггерах
с параллельным переносом (а) и временные диаграммы (б),
поясняющие принцип его работы
П р и н ц и п р а б о т ы . Входные импульсы поступают на С-входы
всех триггеров. Триггер ГГ0 путем подачи сигналов J = K = \ установлен в
Г-режим и поэтому изменяет свое состояние после каждого импульса.
Переключение триггера ГГ, происходит по срезу четных импульсов, тригге­
ра 7Т2— по срезу импульсов с порядковыми номерами к = 4, 8, 12, 16, а
триггера 7Т3 — по срезу импульсов с порядковыми номерами к = 8, 16. При
рассмотрении процессов в счетчике следует иметь в виду, что переклю-
чение двухступенчатого Ж -триггера начинается с появлением входного
импульса, так как первая ступень изменяет свое состояние по фронту
импульса. Поэтому при выполнении соотношения (2) Ж -триггер перехо­
дит в Г-режим до появления очередного импульса, и изменение его со­
стояния происходит по срезу импульса.
Qo
Q>
Qi
На практике для построения счетчиков с параллельным переносом
широко используются Ж-триггеры с логическими входами для перемно­
жения J- и А'-сигналов.
Счетчики с произвольны м коэффициентом пересчета. Рассмотрим
принцип построения таких счетчиков на примере одноразрядных деся­
тичных суммирующих счетчиков. Основой для построения одноразряд­
ных десятичных счетчиков могут служить двоичные четырехразрядные
счетчики. Особенность десятичных счетчиков проявляется в том, что
после десятого импульса они должны вернуться в исходное состояние
(так как коэффициент пересчета К = 10). Для реализации этого условия
используется двоичный код 1010 числа 10 или его инверсное значение
0101. С их помощью формируются сигналы установки триггеров счетчи­
ка в нулевое состояние. На рис. 7 приведен один из возможных схемных
вариантов десятичного счетчика с последовательным переносом, иллю­
стрирующий рассмотренный принцип построения. С появлением кода
Q1Q2Q 1Q0 = Ю10 на выходе логического элемента И-НЕ формируется
нулевой сигнал, который производит сброс всех триггеров счетчика, по­
сле чего возобновляется счет.
Раздел 5
ВВЕДЕНИЕ В АВТОМАТИЗАЦИЮ
ПРОЕКТИРОВАНИЯ
15. АВТОМАТИЗАЦИЯ ПРОЕКТИРОВАНИЯ
ЭЛЕКТРОННЫХ УСТРОЙСТВ
Ц е л ь г л а в ы — дать будущему специалисту представление о сред­
ствах, используемых в настоящее время при проектировании электрон­
ных устройств. На взгляд автора, наиболее просто и наглядно это можно
сделать на примере конкретной системы автоматизированного проекти­
рования. В качестве такой системы выбрана система сквозного проекти­
рования устройств DesignLab 8.0 корпорации MicroSim, подробное опи­
сание которой приведено в [44].
15.1. Общие сведения
Введение. Проектирование электронных устройств представляет собой
итерационный процесс, включающий следующие основные этапы:
=> разработку и моделирование принципиальной электрической схемы;
=> разработку и изготовления печатных плат;
=> проведения испытаний;
=> последующую доработку с учетом внесенных корректив и т.д. до тех пор,
пока не будут удовлетворены все требования технического задания;
=> составление конструкторской документации.
С повышением сложности схем число итераций увеличивается, в свя­
зи с трудностями учета всех возможных эффектов, обусловленных не­
точностью моделирования электронных компонентов и их взаимным
расположением на печатных платах. С увеличением числа итераций уве­
личиваются и затраты на проектирование. Один из путей снижения за­
трат состоит в организации сквозного цикла автоматизированного проек­
тирования электронных устройств, объединяющего схемотехническое
моделирование, изготовление реальной конструкции и ее испытаний при
действии различных дестабилизирующих факторов с учетом разброса
параметров. Для решения такой задачи в настоящее время разработаны
системы сквозного проектирования. К их числу относится рассматривае­
мая система DesignLab 8.0, представляющая собой комплекс программ
для сквозного проектирования аналоговых, цифровых и смешанных ана­
лого-цифровых устройств. Система проектирования обеспечивает графи­
ческий ввод принципиальной схемы, ее моделирование и оптимизацию,
позволяет выполнить синтез аналоговых фильтров и устройств програм­
мируемой логики, а при разработке печатных плат создать управляющие
файлы для программаторов, плоттеров и сверлильных станков. К досто­
инству системы следует отнести возможности:
=> разработки устройств и их моделирования на персональных компьютерах;
=> проектирования печатных плат с учетом паразитных эффектов, при­
сущих реальным конструкциям;
=> моделирования и разработки программируемых и перепрограммируе­
мых логических устройства типа FPGA (Field Programmable Gate Ar­
ray) совместно с другими аналоговыми и цифровыми компонентами.
Состав системы. В системе DesignLab можно выделить:
=> управляющую оболочку для запуска основных модулей системы на
всех стадиях работы с проектом. В качестве такой оболочки использу­
ется программа Schematics, которая одновременно является графиче­
ским редактором принципиальных схем;
=> подсистему схемотехнического моделирования, включающую про­
граммы:
• PSpice A/D для моделирования смешанных аналого-цифровых
устройств;
• PSpice Optimizer для параметрической оптимизации аналогоцифровых устройств по заданному критерию при наличии нели­
нейных ограничений;
• Probe для графического отображения, обработки и документирова­
ния результатов моделирования;
• StmEd — редактор входных сигналов (аналоговых и цифровых);
• Parts для идентификации и расчета по паспортным данным пара­
метров математических моделей диодов, биполярных, полевых и
мощных МОП-транзисторов, биполярных статически индуциро­
ванных транзисторов, операционных усилителей, компараторов
напряжения, регуляторов и стабилизаторов напряжения и магнит­
ных сердечников;
=> подсистему разработки печатных плат, в состав которой входят:
• PC Boards — графический редактор многослойных печатных плат;
• SPECCTRA — программа автотрассировки;
• автономный конвертор обмена PCBoards <н> SPECCTRA;
• Polaris для моделирования с учетом паразитных емкостей и индук­
тивностей, присущих реальным печатным платам;
=> подсистему разработки программируемых логических интегральных
схем (ПЛИС), включающую в себя:
• PLSyn для синтеза цифровых устройств на базе интегральных схем
(ИС) с программируемой логикой PLD/CPLD;
• MicroSim FPGA — интерфейс с программой ХАСТ Step 6.0, пред­
назначенной для проектирования электрически перепрограмми­
руемых ПЛИС фирмы Xilinx (поддерживаются FPGA серий
ХС2000, ХСЗООО, ХС4000, ХС5200 и X-BLOX).
К пакету программ DesignLab прилагаются библиотеки, содержащие, по­
рядка 40 ООО графических обозначений символов, около 10 ООО математиче­
ских моделей компонентов (диодов, стабилитронов, тиристоров, биполярных
и полевых транзисторов, опто-пар, операционных усилителей, компараторов
напряжения, стабилизаторов напряжения, кварцевых резонаторов, магнит­
ных сердечников, цифровых и аналого-цифровых ИС) и примерно 1000 кор­
пусов компонентов производства фирм США, Западной Европы и Японии.
15.2. Графический редактор Schematics
Графический редактор Schematics предназначен для ввода принципиальных
схем проектируемого устройства и передачи управления другим программам
пакета DesignLab. Информация о принципиальных схемах в виде списка со­
единений передается в редактор печатных плат PCBoards и может быть им­
портирована в другие системы разработки печатных плат, например, в P-CAD.
Х арактеристика редактора. Редактор позволяет:
=> редактировать символы (условные графические обозначения отдель­
ных компонентов) и наносить надписи на схему русским шрифтом;
=> создавать чертежи принципиальных схем в соответствии с отечест­
венными стандартами;
=> поддерживать иерархические и многостраничные структуры;
=> моделировать функциональные схемы устройств. При этом каждому
блоку функциональной схемы сопоставляется несколько схем его заме­
щения; сначала проводится моделирование на уровне функционального
описания каждого блока, а затем для ряда блоков составляются в не­
скольких вариантах их принципиальные схемы, и выполняется модели­
рование устройства (без перечерчивания функциональной схемы).
Редактор Schematics управляется с помощью системы ниспадающих
меню. Имеется встроенное средство помощи для получения краткой ин­
формации о правилах работы с редактором. После загрузки графического
редактора из меню можно выбрать режим редактирования принципиаль­
ных электрических схем или символов компонентов.
Работа с программой. После загрузки программы по умолчанию ус­
танавливается режим редактирования схем. На схему наносятся изобра­
жения символов компонентов, которые соединяются электрическими
проводниками или линиями групповой связи (шинами), а также имена
цепей и текстовые надписи, редактируются и создаются вновь атрибуты
компонентов (перечень их параметров). Схема может располагаться на
одной или нескольких страницах, возможны иерархические структуры.
Правильность составления схемы (простейшие ошибки типа отсутствия
соединений) проверяется с помощью программы Electrical Rule Check.
Для визуализации результатов моделирования на схему наносятся
различные маркеры и символы. Например, при активизации пиктограм­
мы на чертеж выводятся значения потенциалов всех узлов схемы.
Редактирование принципиальных схем. Программа Schematics рас­
полагает горизонтальным меню для вызова команд редактирования. На­
пример, раздел меню Draw содержит команды ввода проводников, шин и
размещения символов на текущей странице.
К о н ф и г у р и р о в а н и е р е д а к т о р а . После очистки экрана
с помощью команд меню Option осуществляется настройка конфигура­
ции, в процессе которой осуществляется:
=> выбор режимов работы, например, с включенной или выключенной
координатной сеткой, с привязкой или без привязки графических объек­
тов к узлам сетки, с включенным или выключенным курсором для выво­
да текущих координат и т.п. При включенной сетке выбирается ее шаг;
=> выбор формата чертежа и системы единиц. При выборе европей­
ской системы А4, АЗ, ..., АО все размеры на схеме устанавливаются в
миллиметрах;
=> вы вод основной надписи, или углового штампа, и рамки листа;
=> подключение библиотек символов. После подключения выбранной
библиотеки она становится доступной для всех проектов;
=> настройка командных строк для вызова отдельных программ систе­
мы PSpicead.exe, Probe.exe, StmEd.exe и др.;
=> настройка дисплея и принтера для вывода графической и текстовой
информации. С помощью меню выбирается объект (шины, сетка, про­
водники и др.) и его атрибуты (цвет, ширина, стиль и др.).
Создание
с х е м . Рассмотрим основные этапы построения
принципиальных схем на экране монитора:
=> размещение компонентов реализуется с помощью команды Get New
Part. После ее активизации в диалоговом окне появляется список ком­
понентов, из которого выбирается требуемый компонент. Компонент
может быть выбран из библиотеки. Имеются средства для поиска
компонента по ключевым словам. После выбора компонента он раз­
мещается на схеме. С помощью клавиш можно разворачивать и инвергировать его изображение;
=> простановка позиционных обозначений может осуществляться в авто­
матическом и ручном режимах. В первом случае после простановки
начального номера, например R1, последующие номера получат обо­
значения R2, R3 и т.д. В ручном режиме для простановки номеров ис­
пользуется диалоговое окно. Имеются возможности редактирования
позиционных обозначений, например для отечественных транзисто­
ров ввести обозначения VT1, VT2,...;
=> редактирование параметров компонентов состоит в выборе конкрет­
ных параметров для каждого из них. Например, необходимо указать
тип транзистора КТЗ15 или значение сопротивления 1к;
=> размещение электрических цепей (в виде показанных на рис. 1,а пересе­
чений и соединений) осуществляется с помощью мыши по двум точкам.
Линии соединений могут проходить в горизонтальном и вертикальном
направлениях или под углом. Каждой линии можно присвоить имя. При
редактировании соединений можно перемещать отдельные сегменты
проводника, растягивать линию как резиновую нить;
=> размещение шин. Шина представляет собой совокупность проводников и
ей обязательно присваивается имя (рис. 1,6). Например, шина из шести
проводников DO, D1, ..., D5 имеет обозначение D[0-5]. Входящие в со­
став шины проводники могут отображаться на схеме индивидуально или
коллективно, путем копирования. Именование соединений, входящих в
состав шины, выполняется автоматически или вручную;
=> ввод и редактирование графических примитивов, к которым относят­
ся линии, дуги, прямоугольники, окружности и т.п. При редактирова­
нии можно изменить параметры объекта, например, проставить стрел­
ку или пунктир;
=> ввод текста и его форматирование осуществляется как в обычном
текстовом редакторе;
=> оформление многостраничных схем. Имеются команды, позволяющие
создавать новую страницу, осуществлять переход на другую страни­
цу, выбрать требуемую страницу. Для соединения цепей на разных
страницах используется специальный символ (OFFPAGE), при этом
соединяемые цепи и символ должны иметь одинаковые имена.
Имеются средства сохранения схемы и перенесения проекта на другой
компьютер.
0 (0 -5 ]
П ересечение
С оединение
D [I-3 ]
D1
а)
б>
Рис. 1. Размещение электрических цепей и шин
Редактирование графических символов компонентов. Этот режим
активизируется двумя способами:
=> командой Symbol из меню Edit, с помощью которой в новом окне выво­
дится символ выбранного компонента, доступный для редактирования;
=> командой Edit Library из меню File, с помощью которой открывается
существующая или создается новая библиотека символов. Редактиро­
вание символов компонентов выполняется с помощью соответствую­
щих команд.
В программе Schematic имеется Мастер, позволяющий:
=> автоматически генерировать символы компонентов, имеющих математи­
ческие модели. При этом сначала запрашиваются имена библиотеки, в
которой находятся математические модели компонентов, а затем имя
библиотеки, куда заносятся символы. Мастер может работать в режиме
замены всех существующих символов новыми символами или в режиме
создания символов для моделей, не имеющих символов. Н а экран выво­
дится диалоговое окно, в котором проставляются номера выводов и ре­
дактируется (или задается) текстовое описание компонента;
=> создавать отдельные символы шаг за шагом. На первом шаге указыва­
ется имя символа и вводится его текстовое описание. Затем выбирает­
ся форма символа (прямоугольная, квадратная или другая) и вводится
необходимое количество выводов с указанием их расположения (сле­
ва, справа, сверху, снизу). В завершение можно отредактировать гра­
фику и текстовую информацию символа.
При создании вручную нового символа составляется полное описание
(тип и имя компонента, имя прототипа и его описание). Создается графи­
ческий образ символа компонента, изображаются и при необходимости
редактируются выводы компонента. На заключительном этапе создания
символа редактируют введенные ранее и дописывают новые атрибуты,
задается шаблон компонента. Возможно также создание нового символа:
=> путем копирования графической и текстовой информации одного из
существующих;
=> с помощью программы Parts.
Созданный символ снабжается упаковочной информацией, которая
используется при разработке печатных плат.
Иерархические структуры. При моделировании используются
структуры двух типов:
=> блоки как функциональные схемы устройств. Блок изображается в
виде прямоугольника, к которому подводятся внешние проводники и
шины. Выводы блока нумеруются. В качестве примера на рис. 2,а
изображен блок с тремя входами и двумя выходами и его схема заме­
щения. Каждый блок может иметь вложенные блоки и несколько ва­
риантов схем замещения;
=> иерархические символы, предназначенные для упрощения размещения
на схеме однотипных структур. Они служат для более компактного
представления блока, что упрощает размещение однотипных блоков
на схеме. Графика символа созданного двумя разными командами по­
казана на рис. 2,6.
Рис. 2. Иерархические структуры
Подготовка к моделированию. Рассмотрим основные этапы подго­
товки к моделированию и запуску программ PSpice и Probe.
Размещение
символов
источников
сигна­
л о в . Символы источников хранятся в библиотеках. Например, в библио­
теке Sourcstm.slb находятся символы VSTIM, ISTIM и DIGSTIM, создан­
ные с помощью программы Stimulus Editor и предназначенные для по­
строения источников напряжения аналоговых и цифровых сигналов.
Большое количество символов аналоговых и цифровых сигналов содер­
жится в библиотеке Source.sib. При размещении символов на схеме по
определенным правилам заполняются атрибуты (указываются имя сигна­
ла, постоянная составляющая, амплитуда, длительность и др.).
Простановка
позиционных
о б о з н а ч е н и й . Для
моделирования схемы необходимо, чтобы каждый из ее компонентов
(резистор, конденсатор, транзистор и др.) имел уникальное имя, или по­
зиционное обозначение. В программе предусмотрен режим автоматиче­
ской простановки обозначений.
И м е н о в а н и е ц е п е й и создание списка соединений. Соеди­
нения именуются по принятым правилам. Проведение спектрального и
статистического анализа, расчет уровня шумов требует также указания
имени выходных переменных (разности потенциалов, тока ветви).
П р о в е р к а с х е м ы выполняется с целью обнаружения неподсоединенных выводов, совпадающих позиционных обозначений.
Составление
задания
н а м о д е л и р о в а н и е . По
команде Analysis/Setup вызывается окно, в котором отмечаются нужные
директивы моделирования. Директивы задают режимы работы програм­
мы PSpice (вид анализа, способ вывода результатов и др.).
П о д к л ю ч е н и е б и б л и о т е к . Для проведения моделирова­
ния необходимо располагать хранимыми в библиотеках моделями ком­
понентов и сигналов. Поэтому вызываются поставляемые с системой
библиотеки и некоторые файлы.
К о н ф и г у р и р о в а н и е п р о г р а м м ы P r o b e . В процес­
се конфигурирования можно выбирать автоматический запуск, режим
построения графиков в процессе моделирования, вывод данных послед­
него сеанса моделирования, перечень данных файлов в выходном файле.
З а п у с к п р о г р а м м ы P S p i c e и просмотр результатов моде­
лирования. Результаты моделирования выводятся в текстовом файле с расши­
рением имени .out или графическом виде с помощью программы Probe.
Рассмотрим программы подсистемы схемотехнического моделирова­
ния PSpice, Probe, PSpice Optimizer, StmEd, Parts.
15.3. Программа PSpice
Исторический экскурс. Программа схемотехнического моделирования PSpice
является основой системы сквозного проектирования DesignLab. Ее первая вер­
сия с названием SPICE (Simulation Program with Integrated Circuit Emphasis) раз­
работана в начале 1970-х гг. в Калифорнийском университете. В 1984 г. корпо­
рацией MicroSim создан компьютерный вариант программы PSpice для схемо­
технического моделирования аналоговых устройств. Она позволяла рассчиты­
вать режимы по постоянному току, частотные характеристики, переходные про­
цессы при действии различных входных сигналов, спектральные плотности
внутренних шумов и другие характеристики линейных и нелинейных устройств.
Версия PSpice 4.0, выпущенная в 1989 г., позволила моделировать смешанные
аналого-цифровые устройства. В 1990 г. появилась пятая версия программы с
графическим вводом принципиальных схем в среде Windows, которая вошла в
состав системы сквозного проектирования Design Center. Все версии программ
используют алгоритмы и формат представления входных и выходных данных,
заложенный в программе SPICE. Программа PSpice является эталонной про­
граммой моделирования аналоговых устройств и используется во многих паке­
тах программ систем автоматизированного моделирования и проектирования.
Ниже приводится краткое описание программы схемотехнического
моделирования PSpice.
Функциональные возможности программы. К функциональным
возможностям отнесем виды анализа, которые способна выполнить про­
грамма. Программа PSpice с помощью директив управления заданием на
моделирование позволяет выполнить:
=> анализ режима цепи по постоянному току в рабочей точке;
=> анализ режима по постоянному току при вариации источников постоянного
напряжения или тока и других параметров цепи (многовариантный анализ);
=> расчет чувствительности характеристик цепи к вариации параметров
компонентов в режиме по постоянному току;
=> расчет малосигнальных передаточных функций в режиме по постоян­
ному току;
=> расчет частотных характеристик линеаризованной цепи при воздей­
ствии нескольких сигналов;
=> расчет спектральной плотности внутреннего шума;
=> расчет переходных процессов при воздействии сигналов различной формы;
=> спектральный анализ;
=> статистические испытания по методу Монте-Карло.
С труктура задания на моделирование. Задание на моделирование
для программы PSpice заносится в текстовые файлы. При графическом
вводе схем с помощью программы Schematics создаются три файла зада­
ния с одним и тем же именем и тремя расширениями имени:
=> файлы с расширениями имени .net и .als являются соответственно
списком соединений схемы и списком соответствий номеров выво­
дов компонентов именам подсоединенных к ним цепей. Они исполь­
зуются при создании файла с расширением .cir;
=> файл с расширением .cir является непосредственным заданием на мо­
делирование для программы PSpice, создается автоматически и пред­
ставляет собой текстовый файл, который создается автоматически по
соответствующей команде задания.
Задание на моделирование может быть составлено пользователем с
помощью текстового редактора. В этом случае исходными данными для
составления задания служит принципиальная схема исследуемой цепи
(или устройства) с нанесенными на нее именами узлов и значениями па­
раметров компонентов. Именами узлов могут быть:
=> целые числа от 0 до 9990. В этом случае при ссылке на узел его имя заключа­
ется в круглые скобки. Например, потенциал узла 23 обозначается как V(23);
алфавитно-цифровые символы, в качестве которых используются бу­
квы латинского алфавита от А до Z, цифры 0, 1,..., 9 и знаки $ , -, %, /,
%. В этом случае имена узлов дополнительно заключаются в квадрат­
ные скобки, например потенциал узла IN — V([IN]). Это сделано для
того, чтобы отличить имена узлов от имен компонентов: напряжение
на конденсаторе С2 обозначается V(C2).
Общей точке схемы, или узлу земля, всегда присваивается номер 0.
Задание на моделирование представляет собой текстовый файл. Имя
файла произвольное, рекомендуемое расширение имени — .cir, которое
воспринимается программой PSpice по умолчанию для ее запуска.
С т р у к т у р а файла задания:
=> первая строка, или строка заглавия, которая выводится как заголовок
в выходном файле. В ней может быть помещен любой текст, не со­
держащий кириллицу;
=> строки комментариев, начинающиеся с символа «*» (звездочка). Ко­
нец любой строки после знака «;» (точка с запятой) также восприни­
мается как комментарий. В комментариях допускается кириллица',
=> строки описания отдельных компонентов схемы (сопротивлений, ем­
костей, индуктивностей, источников сигналов и др.);
=> строки, содержащие описание директив управления заданием;
=> последняя строка файла должна содержать директиву .END — окон­
чание задания.
Максимальная длина строки задания составляет 132 символа. При пе­
реносе строка продолжения начинается с символа «+» в первой позиции.
Число пробелов между операторами в строке произвольное. Пробелы и
запятые или знаки равенства эквивалентны. Возможно объедение не­
скольких заданий в один файл. Каждое новое задание начинается со сво­
его заголовка и заканчивается директивой .END.
Особенности оформления:
=> порядок ввода промежуточных строк (за некоторым исключением)
может быть любым;
=> большие и малые буквы программой воспринимаются одинаково;
=> число пробелов между операторами в строке произвольное;
=> пробелы и запятые или знаки равенства эквивалентны;
=> строка продолжения начинается с символа «+» в первой позиции.
Описание компонента. Строки с описанием компонента не должны
начинаться с символа «.» (точка). Описание компонента имеет следую­
щую структуру:
<имя компонента> <номера двух или более узлов> [<имя модели>]
+ <числовые данные>
И м я к о м п о н е н т а состоит из нескольких символов (допускает­
ся до 131 символа) латинского алфавита и цифр. Первым символом имени
является одна из букв латинского алфавита от А до Z, определяющая тип
компонента. Далее в любом порядке следуют алфавитно-цифровые символы
и знаки $, *, /, %. В дальнейшем используются: пассивные компоненты (R,
L, С), независимые источники напряжения (V) и тока (I), а также зависимые
источника напряжения и тока, управляемые напряжением и током.
Н о м е р а у з л о в перечисляются в определенном порядке, уста­
новленном для каждого компонента.
И м я м о д е л и компонентов, указанное в квадратных скобках, не
является обязательным параметром.
Ч и с л о в ы е д а н н ы е определяют значения параметров компо­
нента. Для масштабирования чисел используются следующие суффиксы:
F = 1(Г15, Р = 10~12, N = 10~9, U = КГ6, MIL = 25,4-10 *, М = 10 3, К = 103,
MEG = 106, G = 109, Т = 1012. Для наглядности обозначений допускается к
масштабным суффиксам дописывать буквенные символы. Так со­
противление 5,1 кОм может быть записано несколькими способами:
5100, 5.1К, 5.1 КОМ, 5.1КОНМ, 5.1ЕЗ, 0.0051ЕЗК.
Помимо численных значений в предложениях входного языка програм­
мы могут использоваться идентификаторы параметров, которые заключа­
ются в фигурные скобки: {имя идентификатора}. Например, постоянное
напряжение источника питания, включенного между узлами 6-0, может
быть задано с помощью идентификатора параметра VPOWER: VP 6 0 DC
{VPOWER}. Внутри фигурных скобок допускаются символы арифметиче­
ских выражений, например: С2 5 4 {CLOAD*2.5}, а также такие стандарт­
ные функции как натуральный и десятичный логарифм, тригонометрические
функции и др.
Д ирективы программы. Строки с директивой управления заданием
программы PSpice начинаются с символа . (точка), за которой следует
символическое имя. В табл. 1 представлены используемые в программе
директивы.
Таблица 1
Назначение
Имя
.DC
Расчет режима по постоянному току
.АС
Расчет частотных характеристик
.TRAN
.1C
.STEP
.FOUR
.MODEL
Расчет переходных процессов
Задание начальных условий
Вариация параметров
Спектральный анализ
Описание моделей компонентов
.OPTIONS Установка параметров и режимов работы программы
.PARAM
.PLOT
Определение глобальных параметров
Представление результатов расчета в выходном файле в виде гра­
фиков
.PRINT
Представление результатов расчета в выходном файле в виде таблиц
.PROBE
Передача данных в графический постпроцессор Probe
.TF
Расчет малосигнальных передаточных функций в режиме по посто­
янному току
.END
*
;
+
Конец задания
Строка комментария
Комментарий в конце строки
Продолжение строки
С правилами составления описаний компонентов и директив можно
ознакомиться в [44].
15.4. Графический постпроцессор Probe
Общие сведения о программе Probe. Программа Probe предназначена для
обработки и графического вывода результатов моделирования, полученных с
помощью программы PSpice. Если в задание на моделирование включена
директива .Probe, то результаты моделирования заносятся в файл с расшире­
нием имени .dat. В этом файле содержатся сведения об ошибках, которые
могут быть выведены в виде сообщений. Ошибки подразделяются на фа­
тальные (FATAL), серьезные (SERIUS), информационные (INFO) и преду­
преждения (WARNIGN). При фатальной ошибке моделирование прекраща­
ется. Перечень переменных, данные которых заносятся в файл, устанавлива­
ется по команде (Analysis/Probe Setup) программы Schematics. Данные из
файла с расширением .dat обрабатываются программой Probe и выводятся на
экран монитора в виде графиков. Программа Probe способна выполнять об­
работку данных, включая сложные арифметические и алгебраические вы­
числения, взятие интегралов, преобразование Фурье, измерение параметров
импульсов, частотных характеристик и т.п. При моделировании аналогоцифровых устройств графики переходных процессов в цифровой и аналого­
вой части схемы выводятся на одном экране с одинаковым масштабом по
времени. На графики можно наносить произвольные надписи и графические
символы и выводить их на принтер или плоттер.
П е р е м е н н ы е . В программе Probe используются следующие типы
переменных: аналоговые — Analog, цифровые — Digital, напряжения —
Voltages, токи — Currents, спектральная плотность напряжения выходного
шума — Noise (V2/Hz), напряжения внутренних узлов макромоделей —
Subcircuit Nodes. При вводе переменных символы в верхнем и нижнем реги­
страх не различаются, за исключением масштабных суффиксов т = 10-3 и
М = 10-6. В программе Probe отсутствуют суффиксы MEG и MIL. Осталь­
ные суффиксы имеют те же значения, что и в программе PSpice. Для проста­
новки единиц размерности на осях координат используют следующие обо­
значения: V — вольты; А — амперы; W — ватты; d — градусы; s — секун­
ды; Н — герцы. При этом определено W = V A , V = W/A, А = W/V, поэтому
при построении графика по выражению V(5)*ID(M13) ось ординат будет
автоматически размечена в ваттах. Формат переменных такой же, как в про­
грамме PSpice, за небольшими исключениями. В качестве независимых пе­
ременных в режиме DC (см. табл. 1) выступает напряжение или ток варьи­
руемого источника, в режиме АС — частота, а в режиме TRAN — время.
Размерность вертикальной оси графика устанавливается автоматически в
соответствии с типом имени переменной. Например, в режиме АС при по­
строении графика модуля напряжения V(l) ось Y получит размерность в
вольтах, фазы этого напряжения VP(1) — в градусах, а группового времени
запаздывания VG(1) — в секундах. На график можно вывести не только зна­
чения отдельных переменных, но и выражения, заданного набора математи­
ческих операций.
Работа с программой Probe. З а п у с к п р о г р а м м ы . Програм­
ма может запускаться автоматически (под управлением Schematics) одно­
временно с началом моделирования, после завершения моделирования
или автономно после появления основного экрана программы.
В ы в о д г р а ф и к о в . После выбора режима на экран выводится
координатная сетка графика, по горизонтальной оси которого от­
кладывается независимая переменная, соответствующая выбранному ре­
жиму. Отметим некоторые особенности построения графиков с аналого­
выми и цифровыми переменными.
Аналоговые переменные. Программа Probe обеспечивает режимы построе­
ния графиков передаточной функции по постоянному току, частотных харак­
теристик, переходных процессов. Если входной файл PSpice содержит задание
на моделирование нескольких схем или одной схемы при нескольких значени­
ях варьируемых параметра, файл данных для Probe состоит из нескольких сек­
ций (видов расчета). В этом случае имеется возможность построения графиков
всех вариантов расчета (предлагается только при вариации параметров схемы
или температуры) или выбора из выводимого на экран списка только тех дан­
ных, графики которых должны быть построены. После выбора того или иного
режима на экран выводится координатная сетка графика, по горизонтальной
оси которого откладывается независимая переменная, соответствующая вы­
бранному режиму. Предоставляются возможности'.
=> вывода зависимостей выходных переменных или арифметических
выражений, содержащих эти переменные;
=> редактирования имени переменных и математических выражений;
=> автоматического масштабирования координатных осей, установки
логарифмического или линейного масштаба по координатным осям;
=> вывода несколько кривых на один график, каждая из которых выделя­
ется цветом (а при выводе на принтер — значком);
добавление кривой на графике, удаление одного или всех графиков;
=> вывода части графика в заданном диапазоне значений переменных;
=> изменения имени переменной, откладываемой по оси X;
=> установки диапазона переменных по оси X для вычисления преобра­
зования Фурье и других функций.
Цифровые переменные. Программа Probe позволяет выводить времен­
ные диаграммы логических состояний отдельных цифровых узлов или
шин, на которых для одной переменной обозначают: двойной линией не­
определенное состояние X, тройной — состояние Z высокого импеданса,
нарастающие R и спадающие F фронты (рис. 1).
О
R
1
F
X
1
Z
О
_______* = = = , _______________________________________________
Рис. 1. Цифровые переменные
Имя переменной, вводимой по запросу команды добавления графиков
(Trace/Add), может быть именем цифрового узла или булевым выражением,
содержащим имена таких узлов. Шина (многоразрядное число) формируется
в виде заключенного в фигурные скобки списка цифровых узлов, разделен­
ных пробелами или запятыми, например: {D3D2D1 00}. В выражениях для
цифровых сигналов и шин допустимы следующие операции (в порядке убы­
вания приоритета): объединение в группу, логическое отрицание, умножение
и деление (только для шин), сложение и вычитание (только для шин), логи­
ческое И, логическое исключающее ИЛИ, логическое ИЛИ.
В записи операций с цифровыми сигналами могут содержаться сле­
дующие логические константы: '0 — сигнал низкого уровня; '1 — сигнал
высокого уровня; 'F — нарастающий фронт; 'R — спадающий фронт;
'X — неопределенное состояние; 'Z — состояние высокого импеданса.
Результат арифметических или логических операций с двумя шинами
представляется в виде шины с достаточным количеством разрядов. Ре­
зультат арифметических или логических операций с шиной и цифровым
сигналом представляется в виде шины с тем же количеством разрядов.
Выражения с шинами могут содержать многоразрядные числа, запи­
сываемые в виде текстовой переменной в форме r'ddd, где г' — указатель
системы счисления (х, h, d, о или b), ddd — последовательность цифр в
указанной системе счисления, например: x'3FFFF — шестнадцатеричная,
Ь'100110 —двоичная.
У п р а в л е н и е п о с т р о е н и е м г р а ф и к о в . С помощью
команд реализуются следующие возможности:
=> размещение на одном экране графиков в отдельных координатных
сетках с одинаковым масштабом по оси X и произвольным по оси Y;
=> удаление с экрана выбранной координатной сетки вместе с построен­
ными графиками. Оставшиеся координатные сетки масштабируются и
заполняют весь экран;
=> активизация одной из координатных сеток, в которой в данный мо­
мент строятся графики. Слева от активной координатной сетки уста­
навливается метка S E L » ;
=> разрешение (запрещение) нанесения на различные графики специаль­
ных графических символов (кружки, ромбики и др.);
=> разрешение (запрещение) маркирования выводимых точек на графиках.
М а к р о с ы . При построении графиков можно использовать макро­
сы, например: NORM(A)=(A - MIN(A))/(MAX(A) - MIN(A)). В этом слу­
чае выражение NORM(V(3)) вызовет построение нормированного графи­
ка переменной V(3). Имеется возможность создания новых и редактиро­
вания существующих макросов. В макросах допускаются ссылки на дру­
гие макросы. Макросы редактируются в текстовом редакторе.
Ц е л е в ы е ф у н к ц и и . Перечень целевых функций помещается
в диалоговом окне. Они используются для расчета по значениям в задан­
ных точках. Результаты расчетов отображаются на графике. Например, с
помощью целевой функции Bandwidth (1 ,db level) = x2-xl рассчитывает­
ся полоса пропускания АЧХ на уровне -3 дБ.
Электронный
к у р с о р . Программа Probe обеспечивает
считывание координат точек на графиках с помощью двух электронных
курсоров. Курсоры могут быть связаны с одной или двумя кривыми и
управляются манипулятором «мышь»: левая клавиша управляет первым
курсором, правая — вторым. Текущие значения координат курсоров и их
разность выводятся непрерывно в нижней правой части экрана. Имеются
команды управления положением курсора. С их помощью можно пере­
мещать курсор к следующему пику или впадине кривой, максимуму или
минимуму, к точке следующего отсчета и т.п., а также осуществлять по­
иск определенной точки и перемещение в нее курсора.
Преобразование
Ф у р ь е . С помощью специальной ко­
манды вычисляется быстрое преобразование Фурье всех функций, гра­
фики которых как функции времени выведены на экран. Спектр процесса
представляет собой комплексную величину. Ее модуль, фаза, действи­
тельная и мнимая части выводятся на экран по тем же правилам, что и в
режиме АС. При выводе на экран частотной характеристики рассчитыва­
ется обратное преобразование Фурье, т.е. импульсная характеристика.
И з м е н е н и е и м е н и п е р е м е н н о й п о о с и X. Такая
необходимость возникает при построении фазового портрета, годографа,
характеристики нелинейного элемента по известному воздействию и от­
клику. По умолчанию по оси X откладывается независимая переменная, в
качестве которой в режиме DC выступает напряжение или ток варьируе­
мого источника, в режиме АС — частота, а в режиме TRAN — время.
Размерность вертикальной оси графика устанавливается автоматически в
соответствии с типом имени переменной. Например, в режиме АС при
построении графика модуля напряжения V(l ) ось Y получит размерность
в вольтах, фазы этого напряжения VP( 1) — в градусах, а группового вре­
мени запаздывания VG(1) — в секундах. Специальная команда позволяет
изменить имя переменной по оси X, после чего на экран будет выводить­
ся требуемая из указанных выше зависимостей.
Параметрические
з а в и с и м о с т и . При проведении
многовариантного анализа имеется возможность построения зависимости
целевой функции от варьируемого параметра или температуры. Напри­
мер, для усилителя можно построить зависимость резонансной частоты
(целевая функция) от емкости контура (варьируемый параметр). Про­
грамма Probe предоставляет ручной способ построения параметрических
зависимостей и с помощью Мастера.
П о с т р о е н и е г и с т о г р а м м . Такая возможность обеспечи­
вается для целевых функций после проведения статистического анализа
по методу Монте-Карло. По оси Y откладывается вероятность в процен­
тах, по оси ординат параметр целевой функции. Ниже гистограммы при­
водятся среднее, минимальное и максимальное значения целевой функ­
ции, ее среднеквадратическое отклонение и другие величины.
Нанесение
меток
на
г р а ф и к и . Метками являются
текстовые символы и графические примитивы (отрезки линии, линейно­
ломаные линии, стрелки, прямоугольники, окружности, эллипсы). Метки
наносятся и удаляются с помощью мыши по определенным правилам.
С о х р а н е н и е а т р и б у т о в э к р а н а . К сохраняемым ат­
рибутам относится число координатных сеток на экране, выбор линейно­
го или логарифмического масштаба по осям X и Y и т.д. Такая возмож­
ность предусмотрена для автоматической установки атрибутов при по­
следующих запусках программы Probe.
В ы в о д г р а ф и к о в н а п е ч а т ь . Печать графиков на прин­
тере или плоттере производится с помощью команд меню File по обще­
принятому правилу (выбор типа принтера/плоттера, ориентации листа
бумаги, размеров полей, шрифта и т.д.). При выводе на печать графика с
несколькими зависимостями временные диаграммы выделяются различ­
ными значками. Содержимое текущего окна можно путем копирования в
буфер передать в другие программы (графические и текстовые редакто­
ры), а затем распечатать.
15.5. Другие программы схемотехнического
моделирования
Программа параметрической оптимизации PSpice Optimizer. О с ­
н о в н ы е э т а п ы о п т и м и з а ц и и . При оптимизации использу­
ется метод наискорейшего спуска. Критерием оптимизации служит мак­
симум или минимум целевой функции при выполнении ряда линейных и
нелинейных ограничений. Оптимизация реализуется путем взаимодейст­
вия модуля PSpice Optimizer с графическим редактором Schematics, про­
граммой моделирования PSpice и постпроцессором Probe:
=> в графическом редакторе Schematics создается схема устройства. Вы­
бираются оптимизируемые параметры: имя параметра, начальное и
(или) текущее значение; нижняя и верхняя граница изменения пара­
метра; допуск (в процентах) на отклонение от стандартизованного ря­
да значений параметров при округлении. С помощью диалогового ок­
на задают режим анализа и диапазон изменения текущей переменной
(частоты, времени, источника постоянного напряжения или глобаль­
ного параметра);
zz> вызывается программа PSpice Optimizer. Из списка в главном окне
выбираются целевая функция (с ограничениями) и варьируемые па­
раметры. Используются целевые функции программы Probe и выра­
жения программы с разрешенными математическими операциями
(арифметические операции и возведение в степень) и функциями
(тригонометрические, логарифмическая, экспоненциальная);
=> активизируется процесс оптимизации, и рассчитываются характеристики
схемы для начальных и текущих значений каждого параметра. Значения
целевых функций для исходных параметров схемы отображаются в глав­
ном окне программы, что позволяет оценить их близость к оптимальным
значениям. Вычисляются чувствительности каждой целевой функции к
изменению каждого параметра, равные частным производным;
=> после успешного завершения оптимизации найденные значения пара­
метров отображаются в главном меню. Так как ряд параметров ком­
понентов, например сопротивления резисторов, не могут принимать
любые значения, найденные значения округляют до ближайшей стан­
дартной величины. Новые значения целевых функций после округле­
ния параметров рассчитываются автоматически. Значения найденных
в процессе оптимизации параметров переносятся на схему.
Р е ж и м ы р а б о т ы п р о г р а м м ы . Можно использовать два
режима программы оптимизации: автоматический и интерактивный.
При оптимизации в автоматическом режиме вычисляется матрица чув­
ствительностей и определяется направление изменения параметров. Расчеты
ведутся до тех пор, пока не перестанет уменьшаться разность между теку­
щим и требуемым значениями целевой функции. После этого снова вычис­
ляется матрица чувствительностей и новое направление изменения парамет­
ров. По достижении оптимума процесс оптимизации завершается.
При оптимизации в интерактивном режиме также вычисляются чувст­
вительности, после чего в основном окне программы изменяются значения
параметров и выполняется новый цикл расчета значений целевых функций.
В этом режиме изменения параметров должны быть небольшими.
Р едактор входных сигналов Stm Ed. Основная программа схемотех­
нического моделирования PSpice позволяет выбрать и задать параметры
аналоговых сигналов в виде синусоидальной (SIN, SFFM), экспоненци­
альной (ЕХР), импульсной (PULSE) и кусочно-линейной (PWL) функций.
С помощью редактора поддерживаются указанные выше аналоговые сиг­
налы, а также создаются следующие цифровые сигналы (рис. 1):
=> Clock — синхронизации. Можно задать его начальное состояние, за­
держку и частоту повторения;
=> Signal в виде временной диаграммы с состояниями 0, 1, X (неопреде­
ленное), Z (высокого импеданса). При этом можно задать время пере­
хода из одного состояния в другое;
=> Bus — многоразрядные сигналы, или шины, для которых можно за­
дать систему счисления для указания разрядности, состояния (X или
Z), моменты изменения разрядности, новые значения.
После открытия нового файла библиотеки сигналов с помощью
средств редактора выбирается тип сигнала, указывается его имя и зада­
ются параметры. На экран выводится временная диаграмма сигнала. По­
сле коррекции параметров создается файл с расширением имени .stl, ко­
торый хранится в библиотеке входных сигналов.
Рис. 1. Цифровые сигналы, создаваемые редактором
Программа расчета параметров математических моделей компо­
нентов Parts. Программа позволяет рассчитать по паспортным данным
параметры моделей полупроводниковых приборов (диодов, биполярных
и МОП-транзисторов), макромоделей операционных усилителей и ком­
параторов напряжения, регуляторов и стабилизаторов.
После вызова программы Parts выбирается тип компонента и вводятся
его паспортные данные, имеющиеся в справочниках. Результаты расче­
тов параметров конкретной модели заносятся в файлы с расширением
имени .mod, а нескольких моделей — в файл с расширением .lib.
Рассмотрим подсистему разработки печатных плат.
15.6. Редактор печатных плат PCBoards
По завершении схемотехнического моделирования устройства с помощью
специальных команд производится упаковка схемы и создается список
соединений схемы (в формате редактора печатных плат), а затем вызыва­
ется сам редактор. После задания имени файла соединений (с расшире­
нием .nlf) на экран выводятся изображения корпусов компонентов и ли­
нии электрических связей. Ручная трассировка проводников выполняется
с помощью редактора PCBoards. автоматическая — с помощью програм­
мы SPECCTRA.
Функции редактора PCBoards. Редактор печатных плат предназна­
чен для проектирования многослойных печатных плат с двусторонним
размещением компонентов. Он позволяет:
=> разместить (только вручную) на плате компоненты с указанием ло­
гических связей согласно принципиальной схеме и трассировать
проводники;
=> передать данные в программу SPECCTRA, обладающую большими
возможностями по размещению компонентов, как в ручном, так и ав­
томатическом режиме, которые обеспечивает автономный конвертор
M2S (см. ниже). Кроме того, имеется возможность передачи данных в
программу AutoCAD для нанесения размеров на чертежи печатных
плат и выпуска конструкторской документации, а также в специали­
зированную программу (САМ350) подготовки фотошаблонов.
По результатам разработки печатных плат создаются управляющие
файлы для изготовления фотошаблонов и для сверлильных станков с чи­
словым программным управлением (Numerically-Controlled — NC).
Редактор печатных плат PCBoards функционально подразделяется:
=> на редактор печатных m am (Layout Editors), который выполняет все
основные операции по разработке печатной платы (включая вызов ре­
дактора Footprint Editor);
=> на редактор типовых корпусов компонентов (Footprint Editor), кото­
рый создает графические изображения типовых корпусов компонен­
тов и информацию об упаковке (координаты расположения выводов и
тип компонента, со штыревыми или планарными выводами). Инфор­
мация об упаковке каждого конкретного компонента содержится в
библиотеке Package Library (более 1200 типовых корпусов и данные
об упаковке 32 ООО компонентов).
На основании информации о схеме редактор печатных плат Layout
Editor извлекает необходимые данные из библиотек Package Library,
Footprint Library и Padstack Library (см. рис. 2, п. 15.9) и переносит на эк­
ран графические изображения компонентов с указанием логических со­
единений между выводами. Этот процесс называется упаковкой схемы на
печатную плату. По его завершении вычерчивается контур печатной пла­
ты произвольной формы и выполняются операции размещения компо­
нентов и трассировки печатных проводников.
Информация о печатной плате заносится в PCBoards на 19 слоях, в кото­
рых указываются габариты корпусов, сторона (верхняя, нижняя) платы гра­
фика (расположение) корпусов компонентов, отверстий для сверловки и др.
Дополнительно пользователь может определить 48 слоев в виде любых гра­
фических объектов или информации об электрических соединениях.
С помощью специальных команд осуществляется просмотр и редак­
тирование характеристик слоев, ввод новых слоев.
Редактирование печатных плат. После запуска PCBoards активизи­
руется о кно редактора Layout Editor. С помощью пиктограмм можно вы­
звать наиболее употребительные команды: создать новую плату, загру­
зить существующую плату, сохранить файл платы, изобразить на экране
всю плагу, рисовать линию, рисовать дугу и др. Необходимые для работы
параметры и режимы (система единиц, угол поворота объекта, изображе­
ние курсора, режим автопараномирования, автосохранения и др.) задают
при конфигурировании PCBoards.
Возможно н е с к о л ь к о с п о с о б о в р а з р а б о т к и печат­
ной платы. Простейший из них состоит в создании списка соединений
схемы и использовании конфигурации PCBoards по умолчанию. Более
сложные способы требуют ввода дополнительных слоев и настройки
конфигурации программы в соответствии с особенностями платы. Строго
регламентированной последовательности выполнения отдельных опера­
ций по разработке печатной платы не существует. Однако целесообразно
придерживаться некоторого определенного порядка, который проиллю­
стрируем на примере разработки двухслойной печатной платы:
=> в схемном редакторе Schematics создают принципиальную схему. На
схеме задают правила размещения компонентов (с помощью специ­
альных атрибутов определяют координаты на плате некоторых ком­
понентов, угол ориентации и имя слоя) и правила трассировки цепей
(с помощью специальных атрибутов определяют ширину проводника
и допустимый зазор, имя файла контактных площадок и приоритет
разводки);
=> в редакторе Schematics упаковывают схему и создают файл списка
соединений;
=> в редактор печатных плат PCBoards из Schematics загружают файл
списка соединений, в результате чего на экран переносятся изображе­
ния корпусов и электрические связи;
=> в редакторе PCBoards наносят физические границы печатной платы и
границы области разводки в виде многоугольника.
Размещение компонентов на плате и операции с ними выполняются
в р у ч н у ю с помощью соответствующих команд.
Требование синхронного изменения принципиальных схем и печатных
плат обеспечивается с помощью механизма ECO (Engineering Change Or­
der — техника изменения порядка) двумя способами:
=> прямой корректировкой (Forward Annotation), когда внесение изменений
в печатную плату следует после изменений принципиальной схемы;
=> обратной корректировкой (Backward Annotation), когда внесение из­
менений в схему следует после изменения печатной платы.
Редактирование корпусов компонентов. Редактор корпусов компо­
нентов Footprint Editor вызывается из режима редактирования плат Lay­
out Editor. С его помощью редактируются существующие (типовые ком­
поненты) или создаются новые корпуса компонентов:
=> рисуется графическое изображение корпуса, включая контур компонента,
его выводы, шаблоны позиционного обозначения и имени компонента;
=> указываются габариты компонента (для контроля плотности размеще­
ния компонентов);
=> указывается точка привязки корпуса и его центр (для автоматического
монтажа печатной платы);
=> импортируются и экспортируются файлы внешних текстовых описа­
ний типовых корпусов компонентов.
Создание интегрированных библиотек компонентов. Рассмотрим
методику создания согласованных библиотек символов и корпусов ком­
понентов, предназначенных для выполнения принципиальных электриче­
ских схем, моделирования и разработки печатных плат.
С о з д а н и е с и м в о л а к о м п о н е н т а . Символы компонен­
тов создаются с помощью редактора Schematics (см. п. 15.3). После соз­
дания изображения символа необходимо указать: имя модели (из библио­
теки .lib); имя символа компонента на схеме; имя компонента на плате.
Затем текущему символу ставится в соответствие один или несколько
типов корпусов и указывается соответствие имен выводов символа и но­
меров выводов корпуса. После этого создается библиотечный файл с
расширением имени .plb.
С о з д а н и е к о р п у с а к о м п о н е н т а . С помощью редак­
тора Footprint Editor создается изображение корпуса компонента. Для
каждого вывода указываются его тип (штыревой или планарный) и пара­
метры (стек) контактной площадки (например, круглая форма, внешний
диаметр 40 мил, диаметр отверстия 20 мил). Тип корпуса компонента
указывается в атрибуте упаковки символа. Кроме того, обязательно с по­
мощью команд фиксируется расположение позиционного обозначения
компонента, расположение имени компонента, точка начала координат
корпуса компонента. Корпус компонента заносится в одну из сущест­
вующих библиотек с расширением имени .fib.
Создание
графики
контактных
площадок.
При создании новых контактных площадок вводится текстовая информа­
ция: имя контактной площадки, форма, геометрические размеры кон­
тактной площадке, зазор и др. Информация о контактных площадках за­
носится в файлы с расширением имени .psl.
Составление технической документации. При выводе информации
о печатной плате выбираются:
=> тип данных: Print — принтер/плоттер; Photoplot — фотоплоттер, Drill —
сверлильный станок с числовым программным управлением;
=> страница чертежа, а для каждой страницы — один или несколько слоев.
При выводе чертежей на принтер/плоттер производится выбор типа
принтера/плоттера (или в качестве выходного устройства FILE). В этом
случае каждый слой (вместе с границей платы) обычно размещается на
отдельной странице. Можно вывести чертеж фрагмента печатной платы,
изображение которого находится в текущем окне.
При выводе данных на отдельных страницах задания размещается ин­
формация, содержащаяся на нескольких слоях. Для каждой страницы зада­
ния составляется управляющий файл, имеющий расширение имени .gnn, где
пп — номер страницы. В процессе создания управляющих файлов для фотототтеров формируются списки апертур фотоплоттера и выбирается
формат представления данных. Описания заданий на создание фотошабло­
нов помещаются в текстовых файлах с расширением имени .gig.
При выводе данных на сверлильный станок на одной странице размеща­
ется информация, содержащаяся на всех сигнальных слоях. В процессе соз­
дания управляющих файлов для сверлильных станков редактируются табли­
цы сверл станков и выбирается размер значков, отмечающих центры отвер­
стий, которые обозначают символами «+» или буквами А, В, С...
Для контроля корректности управляющих файлов можно загрузить
их по очереди на вновь созданный несигнальный слой и проверить на
совмещение с изображением печатной платы.
Текстовые отчеты о печатной плате выдают общую информацию о
плате; перечень компонентов; расположение компонентов; список апер­
тур фотоплоттера; список отверстий; перечень корпусов и др.
15.7. Программа SPECCTRA
Общие сведения. Программа SPECCTRA п р е д н а з н а ч е н а для
автоматического и интерактивного размещения компонентов на печатной
плате и трассировки проводников с использованием бессеточной техноло­
гии (Shape-Based). По этой технологии все объекты моделируются в виде
совокупности геометрических фигур (прямоугольник, круг, дуга, трасса,
полигон). В отличие от привязанных к сеткам технологий (Grid-Based) каж­
дый объект моделируется геометрически точно, благодаря чему достигается
более плотный монтаж с меньшим количеством слоев (рис. 1).
Основные особенности бессеточной технологии:
=> меньшие затраты памяти благодаря отсутствию сетки. В бессеточной
технологии память тратится только на описание геометрических форм
объектов, а не на запоминание координат помеченных узлов сетки.
Для сеточной технологии объем памяти резко возрастает с уменьше­
нием шага сетки;
=> поддержка сложных правил проектирования, поскольку для каждого
объекта, расположенного на определенном слое печатной платы,
можно задать ряд индивидуальных правил.
Бессеточная технология
С еточная тех н о л о ги я
Рис. 1. Бессеточная и сеточная технологии
Рассмотрим о с о б е н н о с т и р а б о т ы программы SPECCTRA
в режимах размещения компонентов и трассировки, которые можно вы­
брать с помощью кнопок управления.
Размещение компонентов. В этом режиме на печатной плате должны
быть в произвольном порядке размещены компоненты (внутри или вне конту­
ра платы) и установлены электрические связи. Часть компонентов (например,
разъемы) должна быть зафиксирована. Предварительно проложенные трассы в
результате автоматического размещения компонентов уничтожаются.
В процессе размещения компонентов на строке статуса выводится:
позиционное обозначение текущего компонента; количество выбранных
компонентов; количество размещенных компонентов, отнесенное к их
общему количеству, и другая информация.
Кнопки управления позволяют установить для программы следующие
реж имы, ожидания команды, прерывания выполнения текущей команды,
продолжение выполнения команды, прекращение выполнения команды.
Основные т и п ы к о м п о н е н т о в (и корпусов):
=> большие компоненты (Large), имеющие более трех выводов;
=> малые компоненты (Small), имеющие три и менее выводов;
=> разделительные конденсаторы (Capacitor) и резисторы (Resistor);
=> дискретные компоненты (Discrete), которые нужно размещать отдель­
но от остальных.
Их характеристиками являются максимальная высота, рассеиваемая
мощность, имя семейства, в которые они входят.
Процедура автоматического размещения компонентов на плате (и трас­
сировки проводников) изложена ниже. По завершении работы создаются
выходные файлы:
=> файл, который загружается в программу PCBoards. Ему по умолчанию
присваивается имя входного файла с расширением .rte;
=> файл, который загружается в конвертор-транслятор M2S (рассмотрен
ниже). Ему по умолчанию присваивается имя входного файла с рас­
ширением .ses.
Автоматическое
размещение
компонентов.
Процедуры автоматического размещения реализуются по заранее установ­
ленным правилам с учетом приоритетов. Глобальные правила (установка
зазора между объектами различной природы для каждой стороны платы,
выравнивание компонентов по вертикали или горизонтали и др.) для всей
платы имеют низший приоритет. Более высоким приоритетом обладают
правила размещения компонентов разного типа, еще выше приоритет для
правил размещения индивидуальных корпусов компонентов и т.д. Наивыс­
ший приоритет отводится для зазоров между корпусами компонентов.
Компоненты в автоматическом режиме размещаются на одной или на
двух сторонах печатной платы с помощью программы AutoPlace, которая
распознает шины и размещает компоненты с учетом удобства их трас­
сировки. Возможно также автоматическое группирование компонентов в
так называемые кластеры с учетом их электрических связей. Кластеры
автоматически размешаются в соответствующие комнаты. Комната
представляет собой область на плате (прямоугольной формы или в виде
полигона), имеющая уникальное имя. Для уменьшения общей длины
проводников производится автоматическая перестановка логически экви­
валентных выводов и секций компонентов. Задание жесткого взаимного
расположения компонентов позволяет автоматически размещать разде­
лительные конденсаторы и нагрузочные резисторы вместе с соответст­
вующими интегральными схемами. Возможно расположение планарных
компонентов друг под другом на противоположных сторонах платы.
В режиме автоматического (и интерактивного) размещения компонентов
используются команды. Команды выполняются одним из четырех способов:
щелчком на пиктограмме в меню инструментов, выбором команды в ниспа­
дающем или всплывающем меню, вводом команды на клавиатуре или зане­
сением ее в файл стратегии автотрассировки, или так называемый DOфайл. Поскольку процедура начального ручного заполнения DO-файла за­
нимает значительное время и связана с возможными ошибками, используют
следующий примем. Запускают программу SPECCTRA с простейшим DOфайлом и переходят к пошаговому выполнению команд автоматического
разрешения компонентов, задавая их с помощью управляющей оболочки
SPECCTRA и заполняя стандартные формы.
После завершения процедуры автоматического размещения компо­
нентов, список команд которой помещен в DO-файле, выполнение про­
граммы SPECCTRA завершается.
Автоматическое размещение компонентов используется в основном при
разработке цифровых устройств, состоящих из большого количества однотип­
ных компонентов (ячейки памяти, счетчики, сдвигающие регистры и т.п.). При
этом наиболее часто используются команды привязки размещения малых
компонентов к большим. С их помощью сначала указывается правило расста­
новки малых компонентов рядом с одним большим и затем применяется его
тиражирование для выбираемых больших компонентов. В других случаях
используется интерактивное, или ручное, размещение компонентов.
По завершении размещения компонентов можно выполнить проверку
соблюдения заданных правил. В процессе проверки места нарушений
правил выделяются соответствующими метками. Дополнительно можно
проверить правила трассировки проводников: соблюдение допустимых
зазоров, отсутствие пересечений, несоблюдение заданной длины.
Трассировка проводников. Благодаря применению нового принципа
представления графических данных, так называемой бессеточной техно­
логии (ShapeBased), повышается эффективность трассировки печатных
плат с высокой плотностью расположения компонентов, автоматической
трассировки одной и той же цепи трассами разной ширины и др.
Программа SPECCTRA использует адаптивные алгоритмы, реализуемые
за несколько проходов трассировки. Информация о конфликтах на текущем
проходе трассировки используется так, чтобы, применив новую стратегию,
уменьшить количество конфликтов на следующем проходе. Суть стратегии:
=> на первом проходе выполняется соединение большинства проводников, при
этом не принимаются во внимание возможные конфликты, заключающиеся
в пересечении проводников на одном слое и в нарушении зазоров;
=> на каждом последующем проходе автотрассировщик пытается
уменьшить количество конфликтов, разрывая и прокладывая вновь
связи (метод Rip-up-and-retry), проталкивая проводники и раздвигая
соседние (метод Push-and-shove).
В стратегию трассировки включено большое количество подкоманд, за­
дающих способы изгиба трасс, центрирование проводников и другие особен­
ности стиля разводки конкретной платы. Всем объектам печатной платы при­
сваивается определенный уровень иерархии, и вводятся правила трассировки.
Автоматическая трассировка проводников выполняется согласно этим прави­
лам с соблюдением приоритетов (как и при размещении компонентов).
О с о б е н н о с т и т р а с с и р о в к и п р о в о д н и к о в . Пре­
жде всего отметим, что в режиме предварительной прокладки трасс кон­
фликтные ситуации помечаются графическими символами. На рис. 2 нару­
шение зазора между проводником и контактной площадкой помечено пря­
моугольником, а пересечение проводников в одном слое — ромбом. Н е ­
к о т о р ы е п р и е м ы , позволяющие улучшить качество трассировки:
=> для улучшения технологичности платы без переразводки проводников
производится удаление выступов и уступов проводников, спрямлени­
ем трасс (рис. 3);
Наруш ение зазора
П ересечение проводников
Ликвидация выступов
_ г
Удаление уступов
а)
б)
Рис. 2. Пометки конфликтных ситуаций
при прокладке трасс
Рис. 3. Удаление выступов и уступов
два примыкающих взаимно ортогональных проводника, образующие
изгибы, могут быть сглажены по диагонали или по дуге (рис. 4);
Сглаживание изгиба
по диагонали
по дуге
Сглаживание Т-образного соединения
Рис. 4. Сглаживание изгибов и соединений
при центрировании сегментов проводников осуществляется их сдвиг
таким образом, чтобы они были расположены на равном расстоянии
между соседними выводами компонентов (рис. 5);
Д о центрирования
П о с л е ц ен т р и р о в а н и я
К онтактная
' п л о щ ад к а
L
Рис. 5. Центрирование сегментов проводников
перемещение компонентов и других объектов на плате может привес­
т и к отталкиванию мешающих проводников с соблюдением допус­
тимых зазоров, или к расталкиванию проводников. На рис. 6 показана
операция расталкивания проводников, вызванная необходимостью
огибания вывода;
Д о начала огибания
После огибания вывода и расталкивания
проводников
ш
|л = п ^
JS1
Рис. 6. Перемещение и расталкивание проводников
для подключения проводников к контактным площадкам планарных
компонентов формируются стрингеры, которые представляют собой
короткие сегменты, заканчивающиеся переходным отверстием (ПО).
На рис. 7 изображен стрингер и планарный компонент с подключен­
ными стрингерами. Допускается непосредственно располагать ПО на
контактных площадках (вырожденный стрингер);
К он так тн ая
п л о щ ад к а
п л ан ар н о го
ком п о н ен та
П ереходное
отверстие
С трингер
rfe.ni
О
и
Н еп о ср ед ствен н о е располож ение
п ер ех о д н о го отверстия
на контактной площ адке
!# « !!*
Рис. 7. Стрингер и планарный компонент с подключенными стрингерами
на рис. 8 приведены приемы, используемые при трассировке высоко­
частотных цепей:
• искусственное увеличение длины одной из трасс (рис. 8 ,а), если за­
даны требования к равенству длин трасс нескольких цепей;
контроль максимальной длины (и зазора) параллельных сегментов
(рис. 8,6), расположенных на одном или смежных слоях (для
уменьшения уровня перекрестных искажений и наведенного шума);
экранирование высокочастотных цепи путем подключения экрана
к «земле» или к питанию (рис. 8,в);
прокладка симметричных трасс, или дифференциальных цепей
(рис. 8,г);
У величение
К онтроль
а)
Рис. 8. Трассировка высокочастотных цепей:
искусственное увеличение длины (а);
контроль максимальной длины и зазора (б); экранирование высокочастотных
цепи (в); прокладка симметричных трасс (г)
при выполнении автоматической трассировки проводников предоставля­
ется возможность выбора техники трассировки, показанной н а рис. 9.
Starburst
Daisy-chain
Term inator
lllllll
lllllll
lllllll
llllll
Рис. 9. Техника трассировки Starburst (а) и Daisy-chain (6)
Автоматическая
трассировка.
Предварительно
файл печатной платы с расширением .рса должен быть обработан
конвертором M2S. С помощью меню выбираются (и задаются) пара­
м ет ры автотрассировки, наиболее существенными из которых яв­
ляются:
=> ширина проводников, зазоры между объектами, зазоры между пере­
ходными отверстиями (ПО) и контактными площадками с выбором
имени стека контактных площадок ПО;
=> шаг сетки трассировки и шаг сетки ПО;
=> способов трассировки: Starburst или Daisy-chain (рис. 9);
=> глобальные правила трассировки (ширина трассы и зазор) для отдель­
ных цепей или классов цепей.
По специальной команде проверяется правильность занесения страте­
гии трассировки в DO-файл. При необходимости в него вносятся требуе­
мые изменения и дополнения.
Трассировка проводников проводится в три этапа:
=> предварительная трассировка;
=> автотрассировка;
=> дополнительная обработка результатов автотрассировки.
Трассировка проводников реализуется с помощью команд, вводимых
в процессе взаимодействия с программой SPECCTRA или записанных
заранее в DO-файл. Команды управления процессом трассировки выби­
раются в меню программы или набираются в командной строке Com­
mand. DO-файл для последующей трассировки может быть получен ре­
дактированием файла протокола (с расширением .ссо).
Все фазы трассировки в автоматическом (и интерактивном) режиме
выполняются с помощью набора следующих команд:
=> Bus — разводка выводов компонентов с одинаковыми координатами
X или Y (используется для предварительной трассировки однородных
структур, например микросхем памяти);
=> Fanout — генерация переходных отверстий рядом с контактными
площадками планарных компонентов и соединение их короткими
проводниками;
=> Route — команда трассировки в несколько проходов. На первом про­
ходе разводятся все проводники, не обращая внимания на конфликты
(пересечения проводников в одном слое и др.). На последующих про­
ходах повторно разводятся соединения,