Общие принципы работы сканирующих
реклама

Учебно-методические материалы для проведения демонстрационных занятий и
создания мультимедийного комплекса « Работа сканирующего зондового
микроскопа для диагностики поверхности»
1. Современные представления о морфологии поверхности
Простейшая модель поверхности предполагает, что граница раздела вакуумвещество является идеально плоской и на ней происходит скачкообразное изменение
диэлектрической проницаемости от единицы до значения + в глубине образца. Однако
любая реальная поверхность даже после самой совершенной обработки не является
плоской, а представляет собой двумерный рельеф. Он может быть описан непрерывной,
однозначно определенной в каждой точке с координатами (x,y) функцией z(x,y)=h(x,y)h(x,y), характеризующей отклонение высоты профиля h(x,y)
от усредненной по
поверхности.
Рис.1 Схематический вид статистически шероховатой поверхности
Усредненное произведение высот микрорельефа в двух точках, отстоящих одна от
другой на расстоянии R,
C( R)= z(R)z(0), R=(x2+y2)1/2,
описывает
пространственную
(1)
корреляцию
высот
микрорельефа
и
называется
автокорреляционной функцией. Для статистически изотропных поверхностей она
определяет усредненную по всем направлениям вероятность нахождения точек с
одинаковым значением z на расстоянии R одна от другой. В отсутствие корреляции
С(R)=0, а при наличии корреляций среднее от произведения не распадается на
произведение средних и C(R)0. Можно сказать, что автокорреляционная функция
представляет собой степень отображения системы самой на себя при произвольных
трансляциях (смещениях). В регулярной системе смещения на расстояния, кратные
параметру решетки, отображают ее саму на себя и поэтому С(R) - периодическая
незатухающая функция. В хаотической системе из-за отсутствия дальнего порядка
вероятность
совпадающих
конфигураций
падает
с
увеличением
смещения
и
автокорреляционная функция является монотонно затухающей. В оптике поверхности
традиционно предполагается гауссова статистика шероховатостей. В этом случае
C(R)содержит два основных параметра: среднеквадратичное отклонение высоты профиля
от среднего уровня, или среднеквадратичную шероховатость z(x,y)21/2, связанную с
C(R) простым соотношением С(0)= 2, и корреляционную длину , характеризующую
скорость спада C(R); обычно принимают равной расстоянию, на котором C(R) падает в е
раз.
Другой
количественной
характеристикой
поверхности
может
служить
среднеквадратичная разность высот рельефа
g ( R) z (r ) z (r R)
2
r
2 2 2C ( R )
(2)
Рис.2. Профиль поверхности и корреляционная функция С(х) статистически
шероховатой и строго периодической поверхностей
В экспериментах, связанных с рассеянием излучения, более удобным является
описание поверхности в обратном пространстве. Для этого вводится функция
спектральной плотности (спектр шероховатостей) (PSD функция), являющаяся фурьеобразом автокорреляционной функции
~
С (q ) C ( R )e iqR dR
(3)
~
С (0) 2 С (q)dq
(4)
Так как экспериментально доступен только определенный интервал q, то
q max
~
C (q)dq , где значения qmin и qmax определяются условиями эксперимента.
2
q min
2. Методы исследования поверхностного рельефа
Существует ряд методов исследования поверхности, которые могут быть отнесены к двум
группам:
- зондовые и оптические методы, дающие информацию о профиле локальных участков
поверхности;
- методы, основанные на рассеянии излучений, дающие информацию о статистических
свойствах поверхности.
К первой группе относятся
механические профилометры. Широко известным
является щуповой метод измерения шероховатости поверхности . В качестве щупа
используют
остро
заточенную
(как
правило,
алмазную)
иглу,
приводимую
в
поступательное движение по определенной траектории относительно исследуемой
поверхности. Ось иглы располагают по нормали к поверхности. Механические колебания
иглы преобразуют в электрические и таким образом записывают профиль исследуемой
поверхности. Техника профилометрии достигла сегодня очень высокого уровня.
Существенным этапом повышения точности и чувствительности профилометров стало
использование цифровой обработки сигнала с датчика, что позволило снизить
электронные шумы в профилометре до уровня, эквивалентного среднеквадратической
шероховатости поверхности 10-20 А при нагрузке на иглу 0.5-2 мг . Профилометры типа
Talystep
обладают высокой чувствительностью по вертикали (около 5 А), но в силу
конечного размера кончика ощупываюшей поверхность иглы они верно воспроизводят
микрорельеф только в случае далеко отстоящих микронеровностей или слабоволнистых
поверхностей. В случае же близко расположенных микронеровностей игла профилометра,
скользя по их вершинам, передает только общий контур рельефа. Разрешающая
способность профилометра зависит от радиуса закругления иглы Rt и характера
топографии поверхности и дается оценкой L>2(hRt)1/2, где h - высота неровностей
относительно среднего уровня, L - расстояние между ними. К примеру, для иглы радиуса
Rt=2 мкм микронеровности высотой 10 А могут быть разрешены, если они разделены
промежутками L>450 А. Кроме того, при профилометрировании поверхности, особенно
пластичных материалов, существует опасность ее повреждения иглой.
К
установкам,
реализующим
интерференционные
методы,
относятся
интерферометр Тваймана -Грина , многолучевой интерферометр Физо и многолучевой
интерферометр полос равного хроматического порядка FECO. В этом приборе белый свет
от источника , отразившись от полупрозрачной пластины, коллимируется на поверхности
интерферометра, состоящего из исследуемого образца
и эталонной поверхности.
Исследуемый образец покрывается непрозрачной пленкой серебра толщиной около 100
нмс коэффициентом отражения 98%, а эталон - частично прозрачной пленкой серебра
толщиной около 45 нм с коэффициентом отражения 95% и коэффициентом пропускания
3%. Изображение от интерферометра, пройдя полупрозрачную пластину, направляется на
входную щель спектрографа. Результирующий спектр содержит интерференционные
полосы, положение которых по длине волн определяется воздушным зазором между
плоскостями интерферометра, который составляет 1-2 мкм. Колебания положения FECOполосы
в шкале длин волн несут в себе информацию о профиле поверхности.
Результирующий спектр записывается ТВ-камерой с медленной разверткой. Метод
обладает высокой чувствительностью по вертикали (около 5 А), но дает картину рельефа,
усредненную по площадкам с линейным размером около 2 мкм.
Оптический гетеродинный профилометр. По принципу действия он является
разновидностью интерферометра.
профилометре
освещается
Поверхность образца в оптическом гетеродинном
двумя
сфокусированными
пучками
света,
слегка
различающимися по частоте и поляризованными во взаимно перпендикулярных
плоскостях. Отразившись, эти пучки интерферируют так, что результирующая фаза
модулируется в
соответствии с разницей высот между освещенными точками
поверхности. Если один из пучков сфокусирован на фиксированной точке, а другой
движется по поверхности, то можно измерить высоты точек по линии сканирования
второго пучка, т.е. получить профиль поверхности. Прибор позволяет получить
чувствительность к высоте шероховатости до 0,1 нм, совмещая в себе преимущества
интерферометра
с
предельной
чувствительностью,
характерной
для
щуповых
профилометров. Горизонтальное разрешение составляет около 2 мкм.
Микроскоп
Номарского.
Интерферометр
Номарского
представляет
собой
двухлучевой поляризационный прибор. Оптическая система формирует два пучка света с
одинаковой фазой и
интенсивностью, поляризованные под углом 90 о друг к другу.
Отразившись от поверхности образца, оба поляризованных луча проходят через объектив
и призму, формирующую расходящиеся пучки. Пройдя затем через поляризатор, пучки
интерферируют в плоскости изображения. В полученном изображении поверхности
участки с разными наклонами дают колебания интенсивности. Однако наблюдаемый
контраст зависит не только от шероховатости поверхности, но и от ее отражающей
способности.
Это
не
позволяет
использовать
метод
дифференциального
интерференционного контраста для абсолютных количественных измерений без цифровой
обработки сигнала. К преимуществам метода относятся простота реализации и отсутствие
необходимости покрытия поверхностей.
Во вторую группу входит дифференциальное рассеяние света. Согласно
существующим представлениям , рассеяние света на шероховатой поверхности в первом
приближении происходит следующим образом. Падающая световая волна индуцирует
поляризационные токи, которые запитывают гребни и впадины поверхностного рельефа,
последние таким образом действуют как диполи Герца, излучая свет с характерным для
них угловым распределением. Для поверхностей с небольшой шероховатостью ()
разностью фаз вдоль диполя можно пренебречь, так что интенсивность рассеяния
пропорциональна 2.
Угловое ее распределение
формируется в результате
интерференции излучения диполей и поэтому определяется их пространственным
распределением по поверхности, т.е. видом автокорреляционной функции.
Полное интегральное светорассеяние (TIS). Метод основан на определении
коэффициентов диффузного и полного отражения видимого света . Излучение от лазера ,
проходя через отверстие в сферическом зеркале , попадает на образец , который может
быть как плоским, так и сферическим. Зеркально отраженный от образца пучок выходит
обратно через то же отверстие и, отклоняясь призмой , попадает на приемник , сигнал с
которого поступает на электронное устройство . Свет, рассеянный образцом, отражается
от сферического зеркала и собирается на поверхности второго приемника, сигнал с
которого также подается на электронное устройство. Описанный метод позволяет
проводить измерения среднеквадратичной шероховатости, но не дает возможности
определения параметров поверхности в плоскости (X,Y). Это ограничение метода было
преодолено в приборе, в котором была обеспечена возможность измерения углового
распределения диффузного излучения .
Метод измерения рассеяния рентгеновского излучения. В настоящее время для
исследования поверхностной шероховатости все более широкое применение находят
методы, основанные на анализе углового распределения рассеяния рентгеновского
излучения с длиной волны порядка 0.1 нм. К числу достоинств этих методов относится их
неразрушающий характер, высокая информативность, возможность изучения скрытых
границ раздела, возможность исследования образцов большой площади.
3. Сканирующая зондовая микроскопия
В сканирующих зондовых микроскопах
(СЗМ) исследование микрорельефа
поверхности и ее локальных свойств проводится с помощью специальным образом
приготовленных зондов в виде игл. Рабочая часть таких зондов (острие) имеет размеры
порядка десяти нанометров. Характерное расстояние между зондом и поверхностью
образцов в зондовых микроскопах по порядку величин составляет 0,1—10 нм. В основе
работы зондовых микроскопов лежат различные типы взаимодействия зонда с
поверхностью. Так, работа туннельного микроскопа основана на явлении протекания
туннельного тока между металлической иглой и проводящим образцом; различные типы
силового взаимодействия лежат в основе работы атомно-силового, магнитно-силового и
электросилового микроскопов. Для различных зондовых микроскопов присущи общие
черты.
Пусть взаимодействие зонда с поверхностью характеризуется некоторым
параметром Р. Если существует достаточно резкая и взаимно однозначная зависимость
параметра Р от расстояния зонд - образец Р = P(z), то данный параметр может быть
использован для организации системы обратной связи (ОС), контролирующей
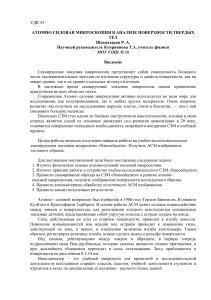
расстояние между зондом и образцом. На рис. 3 схематично показан общий принцип
организации обратной связи сканирующего зондового микроскопа. Система обратной
связи поддерживает значение параметра Р постоянным, равным величине Р 0 ,
задаваемой оператором. Если расстояние зонд - поверхность изменяется (например,
увеличивается), то происходит изменение (увеличение) параметра Р. В системе ОС
формируется разностный сигнал, пропорциональный величине
Рис.3. Схема организации системы обратной связи зондового микроскопа.
ΔР= Р - Р0 , который усиливается до нужной величины и подается на исполнительный
элемент ИЭ. Исполнительный элемент отрабатывает данный разностный сигнал,
приближая зонд к поверхности или отодвигая его до тех пор, пока разностный сигнал не
станет равным нулю. Таким образом можно поддерживать расстояние зонд- образец с
высокой точностью. В существующих зондовых микроскопах точность удержания
расстояния зонд-поверхность достигает величины ~ 0.001 нм. При перемещении зонда
вдоль поверхности образца происходит изменение параметра взаимодействия Р,
обусловленное рельефом поверхности. Система ОС отрабатывает эти изменения, так что
при перемещении зонда в плоскости X, Y сигнал на исполнительном элементе
оказывается пропорциональным рельефу поверхности. Для получения СЗМ изображения
осуществляют специальным образом организованный процесс
сканирования образца.
При сканировании зонд вначале движется над образцом вдоль определенной линии
(строчная развертка), при этом величина сигнала на исполнительном элементе
записывается в память компьютера. Затем зонд возвращается обратно и переходит на
следующую строку сканирования и процесс повторяется вновь. Так осуществляется
кадровая развертка. Записанный таким образом при сканировании сигнал обратной связи
обрабатывается компьютером, и затем СЗМ изображение рельефа поверхности Z=f(x,y)
строится с помощью средств компьютерной графики. Наряду с исследованием рельефа
поверхности, зондовые микроскопы позволяют изучать различные свойства поверхности:
механические электрические, магнитные, оптические и ряд других. Для этого разработаны
специальные методики, получившие названия электросиловая микроскопия, магнитносиловая микроскопия, ближнепольная оптическая микроскопия.
Для
работы
зондовых
микроскопов
необходимо
контролировать
рабочее
расстояние зонд-образец и осуществлять перемещения зонда в плоскости образца с
высокой точностью (на уровне долей ангстрема). Эта задача решается с помощью
специальных манипуляторов - сканирующих элементов (сканеров). Сканирующие
элементы зондовых микроскопов изготавливаются из пьезоэлектриков — материалов,
обладающих пьезоэлектрическими свойствами. Пьезоэлектрики изменяют свои размеры
во внешнем электрическом поле. В настоящее время в качестве материалов сканирующих
элементов зондовых микроскопов
применяют преобразователи из пьезокерамических
материалов.
Принцип работы сканирующего туннельного микроскопа (СТМ) основан на
явлении туннелирования электронов через узкий потенциальный барьер между
металлическим зондом и проводящим образцом во внешнем электрическом поле. В СТМ
зонд подводится к поверхности образца на расстояния в несколько ангстрем. При этом
образуется
туннельно-прозрачный
потенциальный
барьер,
величина
которого
определяется, в основном, значениями работы выхода электронов из материала зонда φ р и
образца φs . При качественном рассмотрении барьер можно считать прямоугольным с
эффективной высотой, равной средней работе выхода материалов.
Рис.4. Схема туннелирования электронов через потенциальный барьер в туннельном
микроскопе.
Как известно из квантовой механики, вероятность туннелирования электрона
(коэффициент прохождения) через одномерный барьер прямоугольной формы равна
W
At
A0
2
2
e kZ
где А0 - амплитуда волновой функции электрона, движущегося к барьеру; А t - амплитуда
волновой функции электрона, прошедшего сквозь барьер; k -
константа затухания
волновой функции в области, соответствующей потенциальному барьеру; ΔZ - ширина
барьера. Для туннельного контакта двух металлов константу затухания можно
представить в виде
k
4 2m *
h
где m - масса электрона, φ* — средняя работа выхода электрона, h — постоянная
Планка. При приложении к туннельному контакту разности потенциалов V между зондом
и образцом появляется туннельный ток. В процессе туннелирования участвуют, в
основном, электроны с энергией в окрестности уровня Ферми EF . В случае контакта двух
металлов выражение для плотности туннельного тока можно записать следующим
образом:
e 2 2m * V
4
jt
exp(
2m * Z )
2
Z
h
h
Рис. 5. Энергетическая диаграмма туннельного контакта двух металлов.
Поскольку экспоненциальная зависимость очень сильная, то для
оценок и
качественных рассуждений часто пользуются упрощенной формулой
jt j0 (V ) exp(
4
h
2m * Z )
в которой величина j0(V) считается не зависящей от изменения расстояния зонд-образец.
Для типичных значений работы выхода (φ~ 4 эВ) значение константы затухания k= 0.2 нм1
, так что при изменении ΔZ на ~ 0.1 нм величина тока меняется на порядок. Реальный
туннельный контакт в СТМ не является одномерным и имеет более сложную геометрию,
однако основные черты туннелирования, а именно экспоненциальная зависимость тока от
расстояния зонд-образец, сохраняются также и в более сложных моделях, что
подтверждается экспериментально.
Экспоненциальная зависимость туннельного тока от расстояния позволяет
осуществлять регулирование расстояния между зондом и образцом в туннельном
микроскопе с высокой точностью. СТМ представляет собой электромеханическую
систему с отрицательной обратной связью. Система обратной связи поддерживает
величину туннельного тока между зондом и образцом на заданном уровне (I0),
выбираемом оператором. Контроль величины туннельного тока, а следовательно, и
расстояния зонд-поверхность осуществляется посредством перемещения зонда вдоль оси
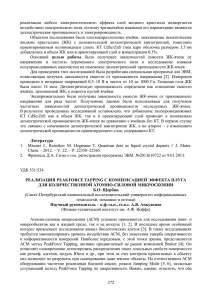
Z c помощью пьезоэлектрического элемента (рис. 6). Изображение рельефа поверхности в
СТМ формируется двумя способами. В режиме постоянного туннельного тока (рис. 7(а))
зонд перемещается вдоль поверхности, осуществляя растровое сканирование; при этом
изменение напряжения на Z-электроде пьезоэлемента в цепи обратной связи (с большой
точностью повторяющее рельеф поверхности образца) записывается в память компьютера
в виде функции Z=f{x,y), а затем воспроизводится средствами компьютерной графики.
При исследовании атомарно гладких поверхностей часто более эффективным оказывается
получение СТМ изображения поверхности в режиме постоянной высоты Z = const. В этом
случае зонд перемещается над поверхностью на расстоянии нескольких ангстрем, а
изменения туннельного тока регистрируются в качестве СТМ изображения поверхности
(рис. 7(б)). Сканирование производится либо при отключенной ОС, либо со скоростями,
превышающими скорость реакции ОС, так что ОС отрабатывает только плавные
изменения рельефа поверхности. В данном способе реализуются очень высокие скорости
сканирования и высокая частота получения СТМ изображений, что позволяет вести
наблюдение за изменениями, происходящими на поверхности, практически в режиме
реального времени.
Рис.6 Упрощенная схема организации обратной связи по туннельному току
Рис .7.
Формирование С ТМ изображений поверхности в режиме постоянного
туннельного тока (а) и постоянного среднего расстояния (б).
Рис.8. Реализация
поверхности.
атомарного разрешения в сканирующем туннельном микроскопе
Разрешение в направлении по нормали к поверхности достигает долей ангстрема.
Латеральное же разрешение зависит от качества зонда и определяется, в основном, не
макроскопическим радиусом кривизны кончика острия, а его атомарной структурой. При
правильной подготовке зонда на его кончике с большой вероятностью находится либо
одиночный выступающий атом, либо небольшой кластер атомов, который локализует его
на размерах, много меньших, чем характерный радиус кривизны острия. Действительно,
туннельный ток протекает между поверхностными атомами образца и атомами зонда.
Атом, выступающий над поверхностью зонда, находится ближе к поверхности на
расстояние, равное величине периода кристаллической решетки. Поскольку зависимость
туннельного тока от расстояния экспоненциальная, то ток в этом случае течет, в
основном, между поверхностью образца и выступающим атомом на кончике зонда. С
помощью таких зондов удается получать пространственное разрешение вплоть до
атомарного, что продемонстрировано многими исследовательскими группами на образцах
из различных материалов.
В
основе
работы
атомно-силовой
микроскопии
(АСМ)
лежит
силовое
взаимодействие между зондом и поверхностью, для регистрации которого используются
специальные зондовые датчики, представляющие собой упругую консоль с острым
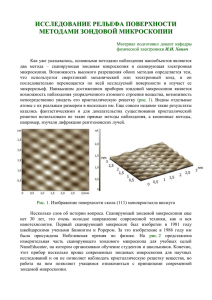
зондом на конце (рис.9). Сила, действующая на зонд со стороны поверхности, приводит к
изгибу
консоли.
Регистрируя
величину
изгиба,
можно
контролировать
силу
взаимодействия зонда с поверхностью. Качественно работу АСМ можно пояснить на
примере сил Ван-дер-Ваальса. Наиболее часто энергию ван-дер-ваальсова взаимодействия
двух атомов, находящихся на расстоянии r друг от друга, аппроксимируют степенной
функцией - потенциалом Леннарда- Джонса:
U LD (r ) U 0 2(r0 / r ) 6 (r0 / r )12
Первое
слагаемое
в
данном
выражении
описывает
дальнодействующее
притяжение, обусловленное, в основном, диполь - дипольным взаимодействием атомов.
Второе слагаемое учитывает отталкивание атомов на малых расстояниях. Параметр r0 равновесное расстояние между атомами, U0- значение энергии в минимуме. Потенциал
Леннарда-Джонса позволяет оценить силу взаимодействия зонда с образцом .
а)
б)
Рис.9. а) Схематическое изображение зондового датчика АСМ
б) Электронно-микроскопическое изображение зонда атомно-силового микроскопа в
процессе сканирования тестовой структуры
Рис.10. Качественный вид потенциала Леннарда-Джонса
Рис. 11. Схема оптической регистрации изгиба консоли зондового датчика АСМ.
Реальное взаимодействие зонда с образцом имеет сложный характер, однако основные
черты данного взаимодействия сохраняются - зонд АСМ испытывает притяжение со
стороны образца на больших расстояниях и отталкивание на малых. Получение АСМ
изображений рельефа поверхности связано с регистрацией малых изгибов упругой
консоли зондового датчика В атомно-силовой микроскопии для этой цели широко
используются оптические методы (рис.11). Оптическая система АСМ юстируется таким
образом, чтобы излучение полупроводникового лазера фокусировалось на консоли
зондового датчика, а отраженный пучок попадал в центр фоточувствительной области
фотоприемника. В качестве позиционночувствительных фотоприемников применяются
четырехсекционные полупроводниковые фотодиоды.
При сканировании образца в режиме ΔZ = const зонд перемещается вдоль
поверхности, при этом напряжение на Z-электроде сканера записывается в память
компьютера в качестве рельефа поверхности Z=f(x,y). Пространственное разрешение
АСМ определяется радиусом закругления зонда и чувствительностью системы,
регистрирующей отклонения консоли. В настоящее время реализованы конструкции
АСМ, позволяющие получать атомарное разрешение при исследовании поверхности
образцов.
При сканировании поверхности зонд движется вдоль линии (строки) сначала в
прямом, а потом в обратном направлении (строчная развертка), затем переходит на
следующую строку (кадровая развертка). Движение зонда осуществляется с помощью
сканера небольшими шагами под действием пилообразных напряжений, формируемых
цифро-аналоговыми преобразователями. Регистрация информации о рельефе поверхности
производится, как правило, на прямом проходе.
Рис. 12. Схематическое изображение процесса сканирования. Направление прямого
хода сканера обозначено стрелками. Регистрация информации производится в точках
на прямом проходе.
Информация, полученная с помощью сканирующего зондового
микроскопа,
хранится в виде СЗМ кадра — двумерного массива целых чисел aij (матрицы).
Физический
смысл
данных
чисел
определяется
той
величиной,
которая
оцифровывалась в процессе сканирования. Каждому значению пары индексов ij
соответствует определенная точка поверхности в пределах поля сканирования.
Координаты
точек поверхности вычисляются с помощью простого умножения
соответствующего индекса на величину расстояния между точками,
производилась запись информации.
в которых
xi x 0 i,
y j y0 j
Здесь х0 и у0 - расстояния между соседними точками вдоль оси Х и У, в которых
производилась запись информации. Как правило, СЗМ кадры представляют собой
квадратные матрицы, имеющие размер в основном 256 х 256 или 512 х 512 элементов.
Визуализация кадров производится средствами компьютерной графики, в основном в
виде трехмерных (3D) и двумерных яркостных (2D) изображений. При 3D
визуализации изображение поверхности Z = f(x,y), соответствующее СЗМ данным,
строится в аксонометрической перспективе с помощью пикселей или линий.
В
дополнение к этому используются различные способы подсвечивания пикселе,
соответствующее различной высоте рельефа поверхности. Наиболее эффективным
способом раскраски 3D изображений является моделирование условий подсветки
поверхности точечным источником, расположенным в некоторой точке пространства
над поверхностью. При этом удается подчеркнуть мелкомасштабные неровности
рельефа.
Также средствами компьютерной обработки
и графики реализуются
масштабирование и вращение 3D СЗМ изображений. При 2D визуализации каждой
точке поверхности ставится в соответствие цвет. Наиболее широко используются
градиентные палитры, в которых раскраска изображения производится тоном
определенного цвета в соответствии с высотой точки поверхности. На рис.13 для
примера приведено 2D изображение участка поверхности.
Рис.13. Яркостное 2D изображение поверхности.
Локальные СЗМ измерения, как правило, сопряжены с регистрацией зависимостей
исследуемых величин от различных параметров. Например, это зависимости величины
электрического тока через контакт зонд-поверхность от приложенного напряжения,
зависимости различных параметров силового взаимодействия зонда и поверхности от
расстояния зонд-образец и др. Данная информация хранится в виде векторных
массивов или в виде матриц размерностью 2хN. Для их визуализации в программном
обеспечении микроскопов предусматривается набор стандартных средств изображения
графиков функций. СЗМ изображение, наряду с полезной информацией, содержит
также много побочной информации, искажающей данные о морфологии и свойствах
поверхности, обусловленные неидеальностью аппаратуры
и внешними
паразитными воздействиями.
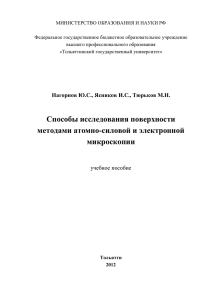
Примеры использования СЗМ для анализа тонких пленок приведены на рис. 14 -16
Рис.14. Поверхность скола монокристалла висмута. Размер скана 40х40х0.09 мкм
На рис.15 приведены результаты АСМ исследования морфологии поверхности
стеклянных подложек. Показано, что на поле 10х10 мкм
наблюдаются два типа
неровностей
с
характерными
размерами
~
10
нм
и
~
500
нм.
Рис.15. Характерные АСМ изображения мелкомасштабных (а) и крупномасштабных (б)
шероховатостей на поверхности стеклянных подложек.
Исследования показали, что величина среднеквадратичной шероховатости увеличивается
с ростом размера кадра (L). (рис.16)
Рис.16. Зависимости среднеквадратичной шероховатости подложек из стекла,
рассчитанной по данным АСМ измерений, от размера кадра.
4.Сканирующая ближнепольная оптическая микроскопия (СБОМ)
Традиционные
методы
получения
оптических
изображений
объектов
имеют
существенные ограничения, связанные с дифракцией света. Одним из основополагающих
законов оптики является существование так называемого дифракционного предела,
который устанавливает минимальный размер
объекта, изображение которого может
быть построено оптической системой при использовании света с длиной волны λ:
R
2n
где n – показатель преломления среды. Для оптического диапазона длин волн предельный
размер составляет величину порядка 200–300 нм.
В
ближнепольной
оптической
микроскопии
используются
другие
принципы
построения изображения объекта, которые позволяют преодолеть трудности, связанные с
дифракцией света, и реализовать пространственное разрешение на уровне 10 нм и лучше.
В основе работы данного прибора используется явление прохождения света через
субволновые диафрагмы (отверстия с диаметром много меньше длины волны
падающего излучения).
Рис. 17б. Линии постоянной интенсивности
Рис.
17а. Прохождение
света
через
оптического
излучения
в
области
отверстие в экране с субволновой апертурой.
субволнового отверстия.
При прохождении света через субволновое отверстие наблюдается ряд особенностей.
Электромагнитное
поле
в
области
диафрагмы
Непосредственно за отверстием на расстояниях
имеет
сложную
структуру.
располагается так называемая
ближняя зона, в которой электромагнитное поле существует, в основном, в виде
эванесцентных (не распространяющихся) мод, локализованных вблизи поверхности
диафрагмы. Если поместить исследуемый объект непосредственно за отверстием в
ближней зоне, то вследствие взаимодействия эванесцентных мод с образцом часть
энергии электромагнитного поля переходит в излучательные моды, интенсивность
которых может быть зарегистрирована оптическим фотоприемником.
Таким
образом,
ближнепольное
изображение
формируется
при
сканировании
исследуемого образца диафрагмой с субволновым отверстием и регистрируется в виде
распределения интенсивности оптического излучения в зависимости от положения
диафрагмы
. Контраст на БОМ изображениях определяется процессами отражения,
преломления, поглощения и рассеяния света, которые, в свою очередь, зависят от
локальных оптических свойств образца .
Рис. 18. БОМ изображение алюминиевой пленки, нанесенной на поверхность подложки,
состоящей из плотнейшей упаковки наноразмерных шариков латекса. Ниже СЗМ
изображение.
5. Электросиловая микроскопия
В электросиловой микроскопии (ЭСМ) для получения информации о свойствах
поверхности используется электрическое взаимодействие между зондом и образцом. Между
зондом и образцом подается постоянное напряжение, модулированное частотой ω. Система
зонд-образец обладает некоторой электрической емкостью. В процессе сканирования
локальное расстояние между зондовым датчиком и поверхностью в каждой точке
поддерживается постоянным, поэтому изменения амплитуды колебаний кантилевера на
частоте 2ω связаны с изменением емкости системы зонд-образец вследствие изменения
диэлектрических свойств образца. С помощью этого метода можно изучать локальные
диэлектрические свойства приповерхностных слоев образцов.
а)
б)
Рис. 19. АСМ (а) и ЭСМ (б)
изображения углеродных трубок на подложке из
полиимида.
6. Магнитно-силовая микроскопия
Магнитно-силовая микроскопия (МСМ) применяется для исследования локальных
магнитных
свойств
ферромагнитного
образцов. Для
материала.
Для
реализации
МСМ
метода на зонд
исследований
как
наносится
правило
слой
применяется
двухпроходная методика. На первом проходе снимается АСМ изображение рельефа. На
втором проходе датчик перемещается на расстоянии z0 над поверхностью по траектории,
повторяющей рельеф образца. Расстояние z0 выбирается таким образом, чтобы сила Ван-дерВаальса была меньше силы магнитного взаимодействия. Локальное расстояние между между
зондовым датчиком и поверхностью в каждой точке постоянно, поэтому изменения изгиба
кантилевера в процессе сканирования связаны с неоднородностью магнитных сил,
действующих на зонд со стороны образца. В колебательных методиках МСМ изображение
формируется посредством регистрации изменений амплитуды или фазы колебаний
кантилевера.
Рис.20. МСМ исследования поверхности магнитного диска: а) – АСМ изображение
рельефа поверхности; б) – МСМ изображение фазового контраста; в) - МСМ изображение
амплитудного контраста; г) - МСМ изображение силы взаимодействия зонда с поверхностью.
В настоящее время различные варианты сканирующих зондовых микроскопов
выпускаются рядом зарубежных
и отечественных фирм. Из отечественных
производителей следует отметить NT – MDT (www.ntmdt.ru), которая производит
широкий спектр зондовых микроскопов и нанотехнологические установки НАНОФАБ.
Для большинства приборов характерно атомное разрешение, минимальный шаг
сканирования от 0.01 до 0.001 нм, максимальный размер кадра не превышает 100х100
мкм. Подавляющее большинство зондовых приборов выпускается с целью решения
задач микроскопии высокого разрешения (вплоть до атомного) и является наиболее
эффективным методом изучения рельефа поверхности.
Содержание практической части.
Знакомство с устройством и работой зондового микроскопа СММ-2000 .
Подготовка микроскопа к работе и установка образца.
Знакомство с приложением Scan Master 2000 для получения изображения поверхности.
Обработка полученного изображения, построение 3D картины поверхностного рельефа.
Определение параметров шероховатости.
Демонстрация работы микроскопа в различных режимах.