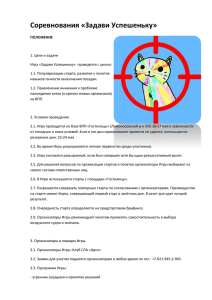
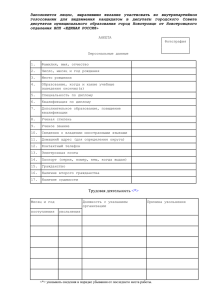
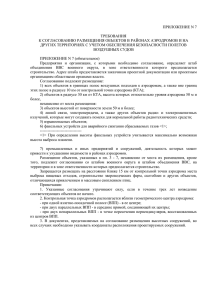
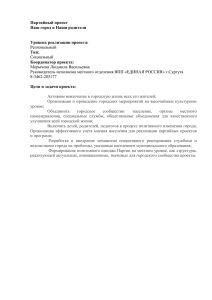
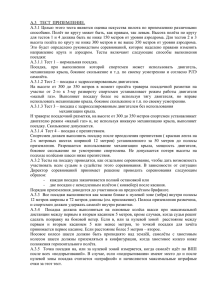
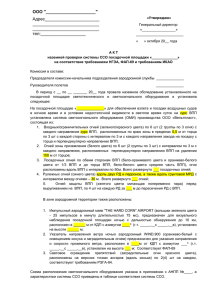
ЛЕКЦИИ Раздел 3 Тема 6 Радиотехнические средства посадки 1. Назначение и классификация Радиомаячные системы посадки (РМСП) предназначены для получения на борту ВС и выдачи экипажу и в САУ информации о величине и знаке отклонений ВС от номинальной траектории снижения, а также для определения моментов пролета характерных точек на траектории захода на посадку. В гражданской авиации используют четыре разновидности РТС посадки: так называемые упрощенные системы посадки ОСП (оборудование системы посадки), радиомаячные системы посадки (РМСП) и радиолокационные системы посадки (РЛСП). В свою очередь, РМСП подразделяются на РМСП диапазонов МВ и ДМВ, эксплуатируемых в настоящее время, и перспективные РМСП диапазона СМВ. Внедрение в последние годы космических средств определения местоположения ВС открывает возможности применения последних для решения задач управления полетом в процессе захода на посадку и ухода на второй круг. Упрощенные системы посадки обеспечивают вывод ВС на аэродром, выполнение предпосадочного маневра и определение места ВС в двух фиксированных точках на траектории посадки. Радиомаячные системы посадки МВ и ДМВ диапазонов позволяют задавать прямолинейную пространственную траекторию захода на посадку (рис.22,а) и определять текущее положение ВС относительно ее, а также фиксировать моменты прохода двух или трех точек на линии глиссады, расположенных на определенном удалении от ВПП. РМСП этого типа обеспечивают задание единственной траектории глиссады планирования и управление ВС в пределах определенных, достаточно узких, секторов вокруг нее. На РМСП диапазона СМВ возлагаются более сложные функции. Эти системы должны обеспечивать определение пространственных координат ВС в определенной области пространства, размеры которой значительно (рис.22,б) превосходят сектора управлений существующих ныне РМСП, и позволять выполнение полетов по любой криволинейной четырехмерной пространственновременной траектории посадки. 4 … 6 0,75 … 15 а) ВПП 37 000 80 б) 40 6000 =15 ВПП 1500 37 000 9300 Рис.22. Траектории посадки ВС, задаваемые: а) - РМСП МВ; б) - РМСП СМВ Таким образом, перспективные РМСП предоставляют большую свободу в выборе траектории посадки и открывают возможности для создания высокоэффективных систем контроля процесса захода ВС на посадку. Они используются для наземного контроля процесса захода на посадку и в случае необходимости передачи на борт с помощью систем воздушной связи указания о корректирующих маневрах относительно траектории захода. 2. Состав и размещение Состав оборудования аэродрома для обеспечения посадки ВС зависит от категории аэродрома. На некатегорированных аэродромах устанавливают упрощенные системы посадки (рис.23). В состав оборудования системы посадки (ОСП) входят дальний и ближний приводные радиомаяки (ДПРМ и БПРМ), оснащенные приводными радиостанциями (ПРС) и маркерными радиомаяками (МРМ). ДПРМ и БПРМ устанавливают на расстояниях соответственно 400020 и 1050150 м от порога ВПП. Воздушное судно __ НАПРАВЛЕНИЕ ПОСАДКИ АРК САС МРП РВ …… ВПП БПРС БМРМ ДПРС ДМРМ БПРМ 1050150 ДПРМ 4000200 Рис. 23. Оборудование ОСП Дальний МРМ обеспечивает экипажу сигнализацию момента времени проверки высоты полета (по радиовысотомеру), расстояния до точки приземления и готовности бортовых систем к обеспечению полета на конечном этапе захода на посадку. Ближний МРМ сигнализирует момент времени проверки по РВ высоты принятия решения и переходе к визуальному этапу посадки. Аэродромы оборудуют, кроме того, светосигнальными системами огней малой интенсивности, автоматическим радиопеленгатором (АРП) и обзорным радиолокатором (ОРЛ-А). При установке на аэродроме РМСП состав оборудования и его эксплуатационные характеристики определяются соответствующими стандартами ИКАО. ИКАО определены 3 категории критериев для посадочных систем. СП любой категории должна обеспечивать с высокой вероятностью успешный заход на посадку до нижнего предела высоты HВПР при дальности видимости на ВПП не менее LВПП. Таблица 1 Эксплуатационные минимумы посадки (Категории СП) (Приложение 10 ICAO, том 1, добавление С, п. 2.1.1.) Высота принятия решения Категория I HВПР HВПР ≥ 60 м (200 фут) Дальность: видимости L видимости на ВПП LВПП либо L ≥ 800 м либо LВПП ≥ 550 м 60 м > HВПР ≥ 30 м - LВПП ≥ 350 м III A 30 м > HВПР ≥ 0 м - LВПП ≥ 200 м III B 15 м > HВПР ≥ 0 м - 200 м > LВПП ≥ 50 м III C HВПР = 0 м - II Системы посадки 3 категории должны LВПП = 0 также обеспечивать автоматизацию приземления, движения по ВПП и рулежным дорожкам. В РМСП МВ пространственная траектория (глиссада) планирования формируется курсовым и глиссадным радиомаяками (КРМ и ГРМ). Первый из них задает в пространстве вертикальную плоскость (плоскость курса), проходящую через ось ВПП, а второй - наклонную плоскость (плоскость глиссады), которая при пересечении с плоскостью курса дает линию глиссады (рис.24). На рис.25 представлена схема размещения РТС посадки на аэродроме и требования стандартов ИКАО к размещению элементов РМСП метрового диапазона волн. Рис. 24. Плоскости курса и глиссады, задаваемые в РМСП Рис.25. Схема размещения элементов РМСП На аэродромах II и III категорий со сложным рельефом местности перед порогом ВПП в состав оборудования может дополнительно входить внутренний МРМ, предупреждающий экипаж о близости порога ВПП. Он размещается на удалении 75 … 450 м от порога ВПП и не более чем 30 м от оси ВПП. На аэродромах со сложным рельефом в зоне захода или другими особенностями в состав РМСП может быть включен дополнительный МРМ, размещенный на удалении до 11 км от торца ВПП. Стандарты ИКАО предусматривают использование двух маркерных пунктов, называемых внешним (ВРП) и средним (СРП) и возможность, в случае необходимости, установки третьего, внутреннего. Средний МРМ предупреждает экипаж о приближении к точке начала визуального наблюдения, внутренний - для обозначения момента пролета ВПР в системах II категории. Антенна системы КРМ устанавливается на оси ВПП у противоположного торца. Расстояние от антенной системы ГРМ до порога ВПП выбирается так, чтобы высота опорной точки траектории посадки (точка на оси ВПП над ее порогом) была равна 15-0 +3 м. Оно зависит от минимального угла наклона глиссады, уклонов местности и других факторов. Боковое смещение антенны ГРМ выбирают из условия обеспечения минимальной высоты пролета над препятствием, и оно не превышает 180 м. Помимо опорной точки глиссады планирования, расположенной над торцом ВПП, в документах ИКАО отмечаются некоторые характерные точки на глиссаде (рис.26). Рис. 26. Характерные точки на траектории захода 3. Принципы взаимодействия оборудования РМСП Основное оборудование РМСП включает в свой состав наземные радиомаяки и бортовые радиоприемники, выходы которых подключаются к соответствующим индикаторным приборам и к системе автоматического управления полетом (САУ или АБСУ). Структурная схема оборудования РМСП представлена на рис.27. Рис. 27. Структурная схема РМСП Курсовой радиомаяк КРМ путем излучения электромагнитных колебаний определенного типа задает в пространстве вертикальную плоскость посадочного курса, и эта плоскость совмещается с осью ВПП. Глиссадный радиомаяк задает в пространстве плоскость планирования, наклоненную к горизонту. В результате пересечения этих плоскостей образуется линия планирования – глиссада. Маркерные маяки обозначают моменты пролета характерных точек на этапе захода на посадку. Все три типа маяков РМСП работают на своих, независимых друг от друга несущих частотах. На борту ВС сигналы КРМ, излучаемые на частоте fКРМ принимаются курсовым радиоприемником КРП, преобразуются и на его выходе выделяется электрический сигнал постоянного тока К , величина которого пропорциональна угловому смещению ВС от плоскости посадочного курса, а полярность определяется стороной отклонения. Сигнал К подается на вертикальную планку нуль-индикатора и в САУ ВС. Сигналы глиссадного маяка ГРМ, излучаемые на частоте f ГРМ, принимаются глиссадным радиоприемником. На его выходе выделяется сигнал постоянного тока Г , величина и полярность которого характеризуют отклонение ВС от плоскости планирования. Этот сигнал поступает на вертикальную планку прибора посадки и в САУ ВС. В случае, когда ВС находиться точно на глиссаде, т.е. в точках пересечения плоскости посадочного курса и плоскости планирования, стрелки нуль-индикаторного прибора располагаются в центре шкалы, а сигналы рассогласования К и Г , поступающие в САУ, равны нулю. Этот факт служит критерием экипажу для пилотирования ВС по глиссаде, задаваемой КРМ и ГРМ. Маркерные радиомаяки работают на своей частоте f МРМ. Сигналы этих маяков принимаются на бору маркерным радиоприемником МРП. В момент пролета ВС над МРМ сигнал на выходе МРП вызывает срабатывание звуковой и световой сигнализации. 4. Принцип работы радиомаяков РМСП Принцип работы КРМ и ГРМ РМСП аналогичен и имеет лишь некоторые различия в зависимости от категории системы посадки. Так курсовые и глиссадные маяки РМСП I-ой категории обеспечивают задание плоскостей курса и глиссады равносигнальным методом. Для этого с помощью антенных систем маяка, имеющих пересекающиеся диаграммы вида F1 и F2 , в пространстве формируется два поля излучения, отличающиеся частотами модуляции 1 и 2 (рис.28). а) б) Рис.5.1. Упрощенная структурная схема (а), ДНА и временные диаграммы сигналов, излучаемых антеннами (б) КРМ ILS I категории Выражения, описывающие мгновенное значение напряженностей полей излучения антенн А1 и А2, имеют вид: e1 Em F1 1 m cos 1t cos t e2 Em F2 1 m cos 2 t cos t Результирующе поле излучения e∑ также оказывается модулированным по амплитуде колебаниями частот 1 и 2 с одинаковыми глубинами модуляции m1 m где F1 F3 и m2 m F2 , F3 F3 F1 F2 . На борту ВС курсовой (глиссадный) приемник принимает эти сигналы и, после обработки и детектирования, на его выходе выделяются огибающие колебаний частот 1 и 2 , затем определяется разность амплитуд огибающих, которая пропорциональна разности глубин модуляции РГМ= m1 m2 . Зависимость РГМ от угловых координат пропорциональна разности векторов диаграмм направленности F1 и F2 (рис.29). По величине РГМ можно судить о положении ВС относительно траектории захода на посадку. Рис. 29. Зависимость РГМ от углового отклонения На равносигнальном направлении (РСН), которое совмещается с плоскостью посадочного курса (глиссады), эта разность равна нулю, а при отклонении от него РГМ возрастает. Величина и знак РГМ будут зависеть от величины и стороны отклонения ВС относительно РСН. Из принимаемых на борту сигналов формируется постоянное напряжение, пропорциональное РГМ. Оно подводится к планкам прибора посадки (ПСП), вертикальная планка которого указывает положение линии курса, а горизонтальная линии глиссады. Структурная схема радиомаяка равносигнального типа (рис.28) включает: генератор высокой частоты, генераторы низкочастотных колебаний ГНЧ1 и ГНЧ2, амплитудные модуляторы АМ1 иАМ2 и антенны А1 и А2. Колебания ВЧ, формируемые ГВЧ, подвергаются амплитудной модуляции колебаниями низких частот 90 и 150 Гц и подводятся к антеннам А1 и А2, формирующими поля излучения, энергия которых распределена в пространстве в соответствии с зависимостью диаграмм направленности F1 и F2 . Линия пересечения диаграмм направленности представляет собой равносигнальное направление, с помощью, которого задается линия планирования. Для приема сигналов КРМ и ГРМ на борту ВС используются радиоприемные устройства супергетеродинного типа (рис.30). Рис.5.4. Структурная схема КРП и ГРП РМСП ILS. На выходе приемника с помощью фильтров Ф1 и Ф2 выделяются низкочастотные колебания частот 90 и 150 Гц. Эти колебания выпрямляются выпрямителями В1 и В2 и через схему вычитания подводятся к стрелочному указателю. Сигнал на выходе схемы вычитания пропорционален РГМ, а его полярность указывает сторону отклонения ВС от глиссады. Выходные сигналы приемника после выпрямления подводятся также и к сумматору, выходной, сигнал которого управляет работой бленкерной сигнализации. При отсутствии сигнала на выходе сумматора бленкерная сигнализация не срабатывает и бленкер экспонируется в поле зрения пилотов, что указывает на отказ наземного маяка или бортового приемника. В радиомаяках более высоких категорий (II и III), у которых требования к стабильности и точности задаваемых траекторий значительно выше, принцип работы КРМ и ГРМ несколько отличается от рассмотренного и получил название метода угломерных измерений с «опорным нулем». Однако, следует отметить, что формируемое в таких маяках поле излучения имеет структуру аналогичную полю равносигнальных радиомаяков и не требует изменения бортового оборудования. 5. Требования ИКАО и основные эксплуатационно-технические характеристики РМСП МВ В соответствии с действующими стандартами ИКАО определены основные эксплуатационно-технические характеристики на наземное и бортовое оборудование радиомаячных систем посадки метровых волн. Требуемые размеры зон действия подсистем "курсовой радиомаяк - курсовой радиоприемник", "глиссадный радиомаяк - глиссадный радиоприемник" представлены на рис. 32, 33. а) б) Рис. 5.10. Зона действия подсистемы КРМ-КРП в вертикальной (а) и горизонтальной (б) плоскостях. Рис.5.11. Зона действия ГРМ-ГРП в вертикальной плоскости В горизонтальной плоскости зона действия подсистемы ГРМ-ГРП ограничивается углами относительно оси ВПП Канал курса Для работы КРМ-КРП систем посадки метровых волн выделяется диапазон частот 108…112 МГц ( 4 м ). Одна из важных характеристик КРМ – приборный курсовой сектор. Это область пространства в окрестности плоскости посадочного курса, на границах которой достигается отклонение стрелки бортового индикатора системы посадки на всю шкалу (4деления шкалы). В пределах курсового сектора обеспечивается прямопропорциональная зависимость между отклонением стрелки прибора и угловым отклонением ВС от плоскости посадочного курса. Под угловым отклонением ВС понимают угол между вертикальной плоскостью, проходящей через ВС и центр антенны КРМ и вертикальной плоскостью, проходящей через ось ВПП. Границы курсового сектора отстоят от оси ВПП на угол 2…30. Другой важной характеристикой КРМ является допустимое отклонение плоскости курса от оси ВПП. Это отклонение характеризует допустимое линейное смещение линии курса от оси ВПП у опорной точки (точка О рис.26). Оно не должно превышать ± 10,5; ± 5; ±3м соответственно для систем I…III категорий. Рекомендуемое значение для систем II категории ± 4,5м. Канал глиссады Глиссадные маяки работают в диапазоне частот 328,6…335,4 МГц ( 1м ). Приборный полусектор глиссады характеризует размер пространственной зоны, в пределах которой достигается отклонение стрелки бортового индикатора до крайних точек шкалы и пропорциональность между отклонениями стрелки и угловыми отклонениями ВС от заданной глиссады планирования. На границах полусектора стрелка должна отклоняться на половину шкалы. Границы полусектора определяются заданным углом наклона глиссады 0 и удалены от линии глиссады на угол (0,1…0,14) 0 . Таблица 5.3 Нормы ICAO на погрешности подсистем КРМ-КРП и ГРМ-ГРП ХАРАКТЕРИСТИКА Допустимое отклонение ЛК от оси ВПП в опорной точке, м Погрешность КРП (σ),мкА Максимальное смещение глиссады Погрешность ГРП (σ),мкА 6. Регламентированные, Категория 2 Категория 3 5 0,075 0,04 9 - критические и чувствительные зоны РМСП Точность работы КРМ и ГРМ зависит от характера местности вблизи антенных систем этих маяков. Сигналы, отраженные от местных предметов, рельефа местности и транспортных средств, находящихся в окрестностях антенных систем, приводят к искривлению формируемой маяками линии глиссады. С целью соблюдения требований к максимально допустимым значениям амплитуды искривлений ЛК и ЛГ участки земной поверхности, примыкающие к местам расположения антенных устройств, тщательно выравниваются и освобождаются от деревьев и кустарника. На этих участках разрешается только установка стоек огней приближения, высота которых ограничивается строительными нормами. В пределах наиболее близко примыкающих к антеннам участков земли вводятся ограничения на высоту неровностей микрорельефа, травяного и снежного покрова. В эксплуатационной документации аэродрома фиксируются конфигурация и размеры этих участков земной поверхности и указываются допустимые значения высот микрорельефа. Эти регламентированными зонами РМСП (рис.1). участки называются Рис. 1. Регламентированные зоны РМСП Для исключения отклонения параметров КРМ и ГРМ более допустимых величин установлены критические зоны РМСП. Критические зоны - это пространство вокруг КРМ и ГРМ, нахождение в котором транспортных средств, включая ВС, вызывает недопустимые искажения задаваемой глиссады. 75 120 Центр антенны КРМ 300 м или расстояние до ближайшего конца ВПП (большая величина) ВПП АФС ГРМ 55 РД Рис.2. Минимальные размеры Место критических зон маркировки РД 1500 РМСП 240 АФС КРМ ВП П АФС ГРМ Рис. 3. Предельные размеры (м) критических зон РМСП 120 60 100 В критической зоне не допускается нахождение рулящих ВС и автотранспорта с момента начала четвертого разворота другого заходящего на посадку самолета. На предпосадочной прямой после входа в глиссаду может находиться не более одного самолета. Границы критических зон данного аэродрома уточняются в процессе летной проверки и обозначаются средствами дневной и ночной маркировки. Зоной чувствительности РМСП называют пространство за границами критической зоны, в пределах которого стоянка или передвижение транспортных средств, включая ВС, может повлиять на характеристики РМСП Размеры зон чувствительности (рис.4) для РМСП различных категорий и различных типов ВС даны в табл.1 . НАПРАВЛЕНИЕ ПОСАДКИ ВПП АФС ГРМ Х 45 Y РД Y Рис. 4. Размеры зоны чувствительности РМСП Таблица 1 Категория РМСП 1 2,3 Параметр В-747 В-727 ВС L<18 м и H<6 м X, м 915 730 250 Y, м 60 30 30 X, м 975 825 250 Y, м 90 60 30 3.3.7. Радиомаячные системы посадки сантиметровых волн. СП СМВ обеспечивают получение на борту ВС и выдачу экипажу и в САУ информации об угловых отклонениях ВС от заданной траектории посадки в вертикальной и горизонтальной плоскостях. Они обеспечивают дополнительно измерение дальности до расчетной точки приземления и содержат в своих сигналах разнообразную дополнительную информацию (рис.40). ВC КРМ 1 ВПП РД r1 Z ТНО РД Z = r1 sin ro r ВПП ВC ГРМ 1 H H = ro sin Рис. 40. Координаты, измеряемые СП СМВ СП СМВ (MLS) разработаны для замены существующих РМСП МВ. Они имеют значительно большими размеры секторов пропорционального наведения ВС, что позволяет формировать оптимальные траектории захода на посадку. Эти системы могут одновременно обслуживать большое число ВС, следующих по различным траекториям на всех этапах захода на посадку, посадки и руления, а также при взлете и уходе на второй круг. Ввод СП СМВ должен способствовать повышению БП, увеличению пропускной способности ВПП, экономии топлива, снижению уровня шума и облегчению посадки вертолетов и других ВС с крутыми траекториями снижения. Кроме координатной информации, радиомаяки СП СМВ передают дополнительную информацию (основные и вспомогательные данные). В качестве основных данных передается следующая информация: - расстояние от антенны КРМ 1 до порога ВПП; - границы зоны пропорционального наведения по азимуту; - ширина луча ДНА; - расстояние от ТНО до порога ВПП; - расстояние от антенны РД до порога ВПП; - минимальный угол наклона глиссады; - высота угломестной антенны и ее смещение. К вспомогательным данным относятся: - информация о размещении наземного оборудования; - информация о состоянии ВПП; - метеорологическая информация и др. Разработано два варианта комплектации наземного оборудования РМПС СМВ, рассчитанных на различные уровни обслуживания. Основной вариант, удовлетворяющий требованиям II категории, включает КРМ1, ГРМ1, ретранслятор дальномера и аппаратуру КДП, обеспечивающую автоматическую передачу данных на борт ВС, дистанционное управление РМ и сигнализацию. Расширенный вариант удовлетворяет требованиям III категории и включает, кроме подсистем, аналогичных подсистемам основного варианта, также КРМ обратного азимута КРМ 2. Схема предполагаемого размещения оборудования < 100 КРМ 1 РД 200 … 1100 90 … 150 приведена на рис. 41. НАПРАВЛЕНИЕ ПОСАДКИ КРМ 2 ВПП ГРМ 2 ГРМ 1 200 … 1100 200 … 400 1000 Рис. 41. Размещение наземного оборудования СП СМВ для одного направления посадки РМСП СМВ СПУТНИКОВЫЕ СИСТЕМЫ ПОСАДКИ В рамках концепции CSM/ATM предполагается применение следующих разновидностей систем посадки: Радиомаячная система посадки метрового диапазона ILS; Радиомаячная система посадки сантиметрового диапазона (РМСП СД), называемая также микроволновой системой посадки Microwave Landing System (MLS); Спутниковые системы посадки (ССП), реализуемые на базе спутниковых систем навигации GNSS и дополнений к ним. Предполагается, что системы посадки типа ILS будут применяться настолько долго, насколько это экономически выгодно и приемлемо с точки зрения обеспечения требуемых безопасности, регулярности и интенсивности полетов. Радиомаячные системы посадки сантиметрового диапазона обеспечивают посадку по любой категории ИКАО и рекомендуются комитетом FANS в качестве перспективных СП будущего. РМСП СД по всем показателям превосходят наиболее широко распространенные системы посадки метрового диапазона ILS. Одним из существенных преимуществ РМСП СД является возможность посадки ВС по различным траекториям, под разными углами наклона к ВПП и с различных направлений. Кроме того, микроволновая система посадки более информативна и позволяет получить на борту ВС данные об азимуте, угле места и дальности. В тоже время переход гражданской авиации на МСП требует громадных капиталовложений, а оснащение аэродромов 4-5 классов и посадочных площадок экономически нецелесообразно. Единственной реальной альтернативой для эффективного и оперативного решения проблемы повышения БП является обеспечение их инструментальными системами спутниковой посадки, получившими в международной практике обозначение GLS – Global Landing System. Использование других инструментальных систем имеет существенные ограничения либо по эксплуатационно-техническим параметрам, либо по стоимости. Общая идеология построения GLS основана на использовании концепции дифференциальных подсистем и заключается в следующем: в точке расположения приемных антенн локальной контрольно-корректирующей станции (ЛККС), координаты которой в геодезической системе координат WGS-84 определены с высокой точностью, осуществляется прием и обработка сигналов ГНСС и формирование корректирующей информации. Затем полученная информация по каналу связи «земля-борт» передается в бортовое оборудование GLS, где используется для исключения ошибок измерений. В настоящее время погрешность определения координат ВС в бортовом оборудовании GLS не превышает 1 м с вероятностью 0.95. Построение наземной подсистемы GLS (ЛККС) зависит от множества разнообразных факторов, определяемых как характеристиками места ее размещения, так и прогнозируемым режимом ее использования. Предполагается, что в составе ЛККС будет присутствовать модуль опорных приемников и передатчик VDB (высокочастотный цифровой передатчик). Передатчик VDB обеспечивает получение данных и поправок к дальномерным сигналам ГНСС посредством передачи цифровых данных в диапазоне частот 108…118 МГц с разделением каналов в 25 кГц. Область действия простирается на расстояние не менее 37 км от места расположения передатчика. Основными функциями бортового оборудования GLS являются: прием сигналов ГНСС, прием и обработка сообщений ЛККС, выбор траектории захода на посадку (FAS), формирование параметров для точного наведения («ILS-подобных» сигналов), определение района точного захода на посадку (PAR), формирование навигационных параметров (координаты, скорости и время) и сигналов тревоги. Раздел 4 Тема 8 РАДИОЭЛЕКТРОННЫЕ СРЕДСТВА НАБЛЮДЕНИЯ 1. Существующие средства наблюдения К средствам наблюдения относятся: - обзорный радиолокатор трассовый (далее - ОРЛ-Т); - обзорный радиолокатор аэродромный (далее - ОРЛ-А); - вторичный радиолокатор (далее - ВРЛ); - посадочный радиолокатор (далее - ПРЛ); - радиолокационная станция обзора летного поля (далее - РЛС ОЛП); - наземная станция аэродромной многопозиционной системы многопозиционной системы наблюдения (далее – МПСН-А); - наземная станция широкозонной наблюдения (далее – МПСН-Ш); - наземная станция контрактного автоматического зависимого наблюдения (далее – АЗН-К); - наземная станция радиовещательного автоматического зависимого наблюдения (далее – АЗН-В); - автоматический радиопеленгатор (далее - АРП); - оборудование видеонаблюдения. 2. Первичные радиолокационные станции (ПРЛС) ПРЛС служат основным источником информации о динамической воздушной обстановке в определенной области пространства. Они предназначены для обнаружения ВС и определения азимутальных углов и дальностей до ВС. ПРЛС производят облучение всех объектов, попадающих в пределы их зоны обзора, и осуществляют прием сигналов, отраженных этим объектами. Анализ принятых сигналов позволяет получать всю необходимую информацию о движении ВС. Принцип функционирования ПРЛС аналогичен принципу функционирования обычной импульсной радиолокационной станции и рассматривался ранее. 2.1. Обзорный радиолокатор трассовый ОРЛ-Т предназначен для обнаружения и определения координат (азимут– дальность) воздушных судов во внеаэродромной зоне (на воздушных трассах и вне трасс) с последующей передачей информации о воздушной обстановке в центры (пункты) ОВД для целей контроля и обеспечения обслуживания воздушным движением. Таблица 1 Требования к основным характеристикам ОРЛ-Т № п/п Наименование характеристики Единица измерения Норматив 1. Максимальная дальность действия, не менее км 350 2. 3. 4. Минимальная дальность действия, не более Угол обзора в горизонтальной плоскости Диапазон рабочих волн СКП по дальности, не более СКП по азимуту, не более Разрешающая способность по Д, не более Разрешающая способность по А, не более км градус см м градус м градус 40 360 23 или 10 300 0,25 1000 1,3 5. 6. 7. Антенная система ОРЛ-Т юстируется относительно истинного меридиана. ОРЛ-Т рекомендуется размещать таким образом, чтобы обеспечивалось перекрытие воздушных трасс данного района зоной действия радиолокатора на высоте от нижнего до верхнего эшелонов контролируемого воздушного пространства. 2.2. Обзорный радиолокатор аэродромный Обзорный радиолокатор аэродромный (ОРЛ-А) предназначен для обнаружения и определения координат (азимут-дальность) воздушных судов в районе аэродрома с последующей передачей информации о воздушной обстановке в центры (пункты) ОВД для целей контроля и обеспечения управления воздушным движением. ОРЛ-А рекомендуется размещать таким образом, чтобы обеспечивался непрерывный радиолокационный обзор контролируемого воздушного пространства в районе аэродрома. Вероятность обнаружение ВС на контролируемых маршрутах полетов в районе аэродрома по первичному каналу должна быть не хуже 0,8, а по вторичному каналу - не хуже 0,9 (при наличии канала ВРЛ). Антенная система ОРЛ-А юстируется относительно магнитного меридиана. Требования к эксплуатационным характеристикам ОРЛ-А приведены в табл.2. Таблица 2 Требования к основным характеристикам ОРЛ-А № п/п Наименование характеристики 1. Вероятность обнаружение ВС на контролируемых маршрутах полетов в районе аэродрома, не хуже 2. Максимальная дальность действия, не менее - по первичному каналу, или - для ОВД в районе аэродрома - для ОВД в районе аэроузла Единица измерения Норматив 0,8 км 50 100 160 Погрешности первичного канала ОРЛ-А без АПОИ (по выносному индикатору кругового обзора - ВИКО), не более 3. По дальности (в зависимости от того, что больше) 4. 5. По азимуту СКП на выходе АПОИ первичного канала ОРЛ-А не должна превышать Для дальности действия 50 – 100 км Для дальности действия 160 км СКП по азимуту, не более Разрешающая способность ОРЛ-А должна быть не хуже По дальности (в зависимости от того, что больше) По азимуту, не более % от расстояния до цели м градус 150 ±2 м м градус 150 200 0,4 2 % от расстояния до цели м 230 градус 7 1 3. Вторичный радиолокатор 3.1 Назначение и характеристики ВРЛ предназначен для обнаружения, определения координат (азимутдальность), запроса и приема дополнительной информации от воздушных судов, оборудованных ответчиками, с последующей выдачей информации в центры (пункты) ОВД. ВРЛ должен быть размещен таким образом, чтобы обеспечивался непрерывный радиолокационный контроль за полетами ВС оборудованных самолетными ответчиками, в секторах ответственности зоны ОВД. Вторичные радиолокаторы могут применяться автономно или включаться в состав трассовых или аэродромных (аэроузловых) радиолокационных комплексов. Основные эксплуатационные характеристики вторичного канала трассовых и аэродромных радиолокационных комплексов приведены в табл. 3. Таблица 3 Требования к основным характеристикам вторичного канала аэродромных радиолокационных комплексов Наименование характеристики Единица измерения Норматив 1. Вероятность обнаружение ВС на контролируемых маршрутах полетов в районе аэродрома, не хуже - 0,9 2. Максимальная дальность действия, не менее км 160 м градус 200 0,2 м градус 1000 4 - 0,9 № п/п 3. 4. 5. СКП на выходе АПОИ вторичного канала не должна превышать По дальности По азимуту Разрешающая способность на выходе АПОИ вторичного канала должна быть не хуже По дальности По азимуту Вероятность получения дополнительной (полетной) информации по вторичному каналу должна быть не менее 0,9. 3.2. Принципы функционирования вторичного радиолокатора Вторичная радиолокационная система представляет собой совокупность ВРЛ, устанавливаемого на земле, и ответчиков, устанавливаемых на борту ВС (рис.1). Рис. 1 . Структурная схема вторичной радиолокационной системы (ВРЛС) ВРЛ вырабатывает кодированные запросные сигналы, представляющие несколько высокочастотных импульсов, отстоящих друг от друга на определенные временные интервалы (коды запроса). Через направленную в горизонтальной плоскости антенну запросные коды излучаются в пространство. На борту ВС запросные сигналы принимаются ответчиком, и после усиления и преобразования в устройстве формирования ответа УФО образуется ответный кодированный сигнал (ответные коды), который излучается передатчиком ответчика через ненаправленную антенну в пространство. Ответный сигнал представляет набор импульсных сигналов, которые в закодированном виде содержат ответную дополнительную информацию. ВРЛ принимает ответные сигналы, которые после усиления и преобразования поступают на индикаторные устройства. Одной из особенностей системы вторичной радиолокационной системы является то, что несущие частоты, на которых передаются запросы и ответы, выбираются различными. В системах ВРЛ обнаружение ВС и измерение их координат (азимута и наклонной дальности) осуществляется, так же как и в ПРЛС. При распространении запросов от ВРЛ до ВС и ответов от происходит их запаздывание во времени на величину ВС до ВРЛ tз = 2r/c + t0, где t0 - дополнительная задержка, связанная с формированием ответного сигнала и его обработкой в ВРЛ. Время запаздывания ответных сигналов зависит только от расстояния до ВС, поскольку задержка t0 - величина постоянная. Время tз измеряется непосредственно по индикатору, тем самым измеряется расстояние r между ВРЛ и ВС. Азимут ВС определяется по углу поворота антенны ВРЛ в момент поступления ответных сигналов. Дополнительная информация после специальной обработки отображается на обычных индикаторах в виде дополнительных отметок либо на специальных индикаторах (цифровые табло, знаковые ЭЛИ). Во вторичных радиолокационных системах (ВРЛС) УВД в качестве дополнительной информации передаются бортовой номер, высота полета, запас топлива, сигналы бедствия, потери радиосвязи и др. Кодирование сигналов Кодирование сигналов в ВРЛС производится в каналах запроса и ответа для представления информации, передаваемой по этим каналам, и для повышения помехоустойчивости ВРЛС. Режим импульсного излучения вынуждает использовать в ВРЛС различные разновидности импульсных кодов. Так как разработка ВРЛС в России осуществлялась независимо от западных разработок, стандарты, стандарты на них в России и ИКАО оказались различными. Это различие, прежде всего, коснулось кодов. Российский код называется кодом УВД, международный — кодом RBS, причем в отечественных ответчиках предусмотрена возможность работы с кодами УВД и RBS. При реализации режима УВД в канале запроса поочередно излучаются двухимпульсные кодовые посылки для запроса бортового номера (1-я посылка), высоты полета (2-я посылка), путевой скорости (3-я посылка) и координатной отметки (4-я посылка). Эти посылки отличаются временным интервалом между импульсами кодовой пары. Ответные коды УВД состоят из трех частей (рис.2). Первая его часть представляет так называемую координатную двухипульсную посылку КК, с помощью которой формируется отметка ВС на экране индикатора, вторая — ключевой трехимпульсный код, обозначающий содержание информации следующей в третьей, информационной части кода. Ключевой код имеет три разновидности. Это может быть код ключа номера КН, либо ключ высоты КВ, либо ключ скорости КС. а) код бортового номера; б) код высоты Рис. 64. Структура ответных кодов в режиме “УВД” Рис. 2. Ответные коды в стандарте УВД Третья информационная часть ответного кода представляет собой многоимпульсный позиционный двоично-десятичный код, для которого выделено 80 временных позиций, отстоящих друг от друга на 4 мкс. Каждые 8 временных позиции называются декадами и предназначены для представления нулей и единиц, с помощью которых формируются десятичные цифры и числа. Для отображения единиц и нулей используется по две позиции. Единице соответствует импульс на первой временной позиции, нулю — на второй . Если ответный код содержит информацию о бортовом номере , то первая декада отображает единицы номера, вторая десятки, третья - сотни, четвертая - тысячи, пятая - десятки тысяч. Таким образом, информация о бортовом номере занимает 40 временных позиций. Остальные 40 служат для повторения информации о бортовом номере в интересах повышения его верности. Ответный код высоты и запаса топлива имеет сходную структуру. Вначале следует координатный код КК и код ключа высоты КВ (рис.2). Далее идут 80 позиции, разделенные на 10 восьмиэлементных декад, каждая из которых обеспечивает кодирования десятичных цифр. Первая декада отображает десятков метров высоты, вторая — сотен, третья — тысяч, четвертая — десятков тысяч и вида информации о высоте (абсолютная или относительная), пятая представляет запас топлива. Последующие пять декад, как и прежде, служат для повторения этой информации. Путевой угол кодируется с помощью первых 10 пар информационных импульсов, каждая из которых позволяет отобразить угол с дискретностью 1800/256 значениями, кратными этим минимальным долям. Путевая скорость передается с дискретностью 5,9 м/с десятью следующими парами. Численное значение путевого угла и скорости определяется суммой численных значений, закрепляемых за отдельными разрядами, в которых фигурируют единицы. Международный код RBS имеет следующую структуру (рис.3). Рис. 3. Структура ответного кода номера (7306) в режиме RBS Запросные сигналы представляют собой 4 вида двухимпульсные кодов А, В, С и D. Коды А и В служат для запрос номера рейса, С — высоты, D — резервный. Ответные коды более сложные. Они содержат импульса F1 два опорных и F2 соответствующих координатному коду КК и серию информационных импульсов, располагаемых на 13 временных позициях между опорными импульсами. Номер рейса и высота полета передаются четырьмя группами импульсов А, В, С и D, каждая из которых отображает цифру восьмеричной системы счисления. Для отображения цифр от 0 до 7 в каждой группе имеется три позиции, обозначенных буквами А1, А21, А4 , В1 , В2, В4 и т.д. Позиция, занимаемая импульсом, имеет значение двоичной единицы, пустая — нуля. Таким образом, здесь реализована четырехзначная двоично-восьмеричная система счисления, позволяющая отобразить 4096 номеров ВС, высоты в пределах 103…105 футов с дискретностью 100 футов. При передаче информации о номере импульсы группы А кодируют информацию, соответствующую тысячам, В — сотням, С — десяткам и D — единицам десятичных чисел. Число 7700 служит для передачи сигнала бедствия, число 7600 — сообщения о потере радиосвязи, 7500 — о нападении на экипаж. Дополнительный импульс SPI предназначен для индивидуального опознавания и передается по запросу по каналам радиосвязи с земли. Импульс выдается в течение 10…30с при нажатии кнопки “Знак” на пульте управления бортовым ответчиком. При передаче информации о высоте порядок передачи групп импульсов информационного кода установлен следующим: D, А, В, С. В группе D используется две позиции D2 и D4 позиция D1 свободна и передаются три градации высоты ценой 32000 футов каждая. Позициями групп А и В передается по 7 градаций ценой соответственно 4000 и 500 футов каждая, а позициями группы С — 5 градаций по 100 футов. Последняя пятая градация передается цифрой 7 . Цифры 5 и6 не используются. Максимальная высота, которая кодируется таким методом, будет равна сумме произведений чисел градаций на их цену, т.е. 128000 футов. Так как отсчет высоты производится от остаточной высоты 1300 футов, то максимальная передаваемая высота будет 126700 футов. Процесс заполнения позиций и градаций идет следующим образом. После заполнения пяти градаций С двоичная единица передается на позиции В. Позиция С при этом обнуляется. После заполнения пяти градаций В единица передается позиции А, а после ее заполнения позиции D. Заполнение может изменяться как в большую, так и в меньшую сторону. Недостатки существующих систем ВРЛ и перспективы развития Опыт эксплуатации систем ВРЛ выявил ряд существенных недостатков, которые ограничивают их использование в составе автоматизированных систем УВД. К ним относятся: - невысокие точностные характеристики определения координат ВС - значительная зона (до 100 км) влияния боковых лепестков, снижающая вероятность получения информации при увеличении интенсивности воздушного движения и числа ответчиков из-за наложения ответных кодов; - недостаточный объем информации, содержащийся в ответных сигналах; невысокая пропускная способность; - ограниченная пропускная способность по информационному обмену. Радикальное устранение существующих недостатков систем ВРЛ будет осуществлено при внедрении дискретно-адресной ВРЛС (ДАС). Основной принцип работы ДАС заключается в использовании индивидуальной адресации запроса и ответа, для чего всем ВС (ответчикам) присваиваются номера-адресы, а в сигналы запросов и ответов включаются адреса ответчиков ВС. При этом значительно уменьшается вероятность наложения кодов, так как поток ответных сигналов уменьшится в 10…20 раз. Следовательно, увеличивается пропускная способность ответного канала ВРЛС. Это позволит увеличить объем передаваемой по ним информации и использовать его для речевого обмена между диспетчерами и экипажами ВС. В принципе число запросов на одно ВС при адресной работе может быть уменьшено до одного. В ДАС, кроме запросной и расширенной полетной информации, с борта ВС будут передаваться следующие сообщения: навигационная информация от БПНК ВС, информация о метеообстановке в районе полета, решение экипажа по использованию полетной информации, а с земли будут передаваться: указания диспетчера УВД, дублирующие их передачу по каналу голосовой связи (эшелон, курс, частота радиосвязи, минимальная безопасная высота полета), инструктивная информация о воздушной обстановке. Кроме того, по этим же каналам обеспечивается автоматическая работа системы предупреждения столкновений с ВС и с землей. Предусмотрено буквенно-цифровое отображение информации в кабине пилотов. Для запроса каждого ВС запросчик должен хранить данные об адресах и ориентировочном местоположении ВС, находящихся в зоне действия ВРЛ. Для получения этих сведений ДАС вначале работает в режиме “Вызов всем” с запросом координат всех ВС и адресов ВС с ответчиками ДАС. Ответы запоминаются в наземной РЛС, после чего возможна работа в режиме индивидуального запроса, который заключается в ориентировании ДНА на определенные ВС по заданной оператором программе с целью их автосопровождения. Периодически режим “Вызов всем” должен повторяться с целью получения обновленной информации о несопровождаемых ВС и новой от ВС, вошедших в зону наблюдения. Возможность одновременной работы систем ДАС и существующих СВРЛ обеспечивается чередованием адресного и неадресного режимов. Длительность периода адресной работы выбирается такой, чтобы обеспечить обработку 10 ответчиков в луче ДН. 4. Посадочный радиолокатор Посадочный радиолокатор (ПРЛ) предназначен для обнаружения и контроля за полетом воздушного судна на траектории захода на посадку. ПРЛ должен обеспечивать выдачу на диспетчерские пункты УВД радиолокационной информации о местонахождении ВС с эффективной отражающей поверхностью 15м3 и более относительно линии курса и глиссады в воздушном пространстве, ограниченном сектором по азимуту не менее 20° и по углу места не менее 7°, на расстоянии не менее 17 км от антенны с вероятностью обнаружения не хуже 0,9. Максимально допустимая погрешность в определении расстояния от ВС до точки приземления не должна превышать 30 м + 3% этого расстояния. Максимально допустимая погрешность определения отклонения ВС от линии курса должна составлять либо 0,6% расстояния от антенны ПРЛ до ВС плюс 10% отклонения от линии курса, либо 9 м (берется большая величина). Максимально допустимая погрешность определения отклонения ВС от заданной траектории снижения должна составлять либо 0,4% расстояния от антенны ПРЛ до ВС плюс 10% фактического линейного отклонения от выбранной траектории снижения, либо б м (берется большая величина). Разрешающая способность должна быть не хуже: - 120м по дальности; - 1,2 по азимуту (курсу); - 0,6 по углу места. Радиолокационная информация должна обновляться по крайней мере каждую секунду. 5. РЛС обзора летного поля Радиолокационная станция обзора летного поля (РЛС ОЛП) предназначена для контроля и управления движением воздушных судов, спецавтотранспорта, технических средств и других объектов, находящихся на рабочей площади аэродрома (площади маневрирования и перроне, ВПП, рулежных дорожках и местах стоянок воздушных судов). Для аэродромов, имеющих ВПП точного захода на посадку III категории ИКАО, РЛС ОЛП является обязательным оборудованием. Радиолокационная станция обзора летного поля (РЛС ОЛП) должна обеспечивать обнаружение с вероятностью не менее 0,9 воздушных судов и транспортных средств с эффективной отражающей поверхностью не менее 2 м2, находящихся на ВПП, находящихся на удалении от 90 м до 5000 м от антенны радиолокационной станции. Угол обзора в горизонтальной плоскости должен составлять 360. Допускается секторный обзор. Ошибка измерения координат должна быть не более: - 10м по дальности (аналоговый индикатор); - 1м по дальности при наличии АПОИ; - 0,20 по азимуту. Разрешающая способность по дальности и азимуту в режиме кругового обзора на масштабе 2 км должна быть не хуже 15м. На экране индикатора должна отображаться следующая информация: - очертания контуров взлетно-посадочных полос, рулежных дорожек, перрона аэродрома; - координатная информация от ВС и транспортных средств. 6. МНОГОПОЗИЦИОННЫЕ СИСТЕМЫ НАБЛЮДЕНИЯ Многопозиционные системы наблюдения (МПСН) (с английского: Multilateration MLAT) – это многопозиционная пассивная (или пассивноактивная) РЛС, состоящая из нескольких приемных станций, наземной станции обработки и контрольного ответчика. Данная система основана на определении местоположения путем мультилатерации или гиперболического позиционирования. Иными словами, это метод, основанный на нахождении линий или поверхностей положения, соответствующих навигационным параметрам, которые характеризуют место ВС относительно РНТ. В качестве навигационного параметра выбрана разность расстояний, которая определяется по разнице во времени прибытия сигнала, излучаемого объектом в направлении трёх или более приемников. Линией положения для разницы расстояний является гипербола. Теоретически мультилатерация может выполняться с использованием любых сигналов, периодически передаваемых с борта воздушного судна. Однако системы, используемые для гражданских целей, основаны только на сигналах приемоответчиков ВОРЛ. Система MLAT требует наличия, по крайней мере, четырех принимающих станций для расчета местоположения (трех координат) воздушного судна. Рассмотрим суть технологии подробнее. Посланный объектом (бортовое оборудование) сигнал будет получен двумя далеко расположенными друг от друга датчиками в разное время, это зависит от расстояния между датчиком и объектом. Разница во времени между двумя приемниками сопоставляется с гиперболоидом, на котором находится ВС. Также сигнал получает третий приемник, который расположен в некой точке. Производится еще одно измерение разницы во времени получения сигнала и получение второго гиперболоида, на котором находится объект. Пересечение этих двух гиперболоидов показывает кривую, по которой объект движется. Если есть четвертый приемник, производится третье измерение разницы во времени, и пересечение уже имеющейся кривой с третьим гиперболоидом определяет конкретную точку в пространстве. Таким образом, определяется точное местонахождение объекта в трехмерном пространстве. Назначение и решаемые задачи МПСН Использование системы многопозиционного наблюдения позволяет решать целый ряд актуальных для авиации задач. В общих чертах, приложения УВД на основе мультилатерации подразделяются на несколько направлений: аэродромные приложения наземного движения для наземного и аэродромного управления; зональный обзор и обзор захода на посадку в воздушном пространстве с радиолокационным обзором; зональный обзор и обзор захода на посадку в воздушном пространстве без радиолокационного обзора; технические улучшения системы УВД, включая выборку параметров RVSM и выборку параметров ADS‐B. Если рассматривать вопрос назначения системы более детально, то можно составить следующий список специфического применения MLAT: обзор наземной поверхности аэропорта; и данные, генерируемые ЛА, для наземных средств УВД; ситуационная осведомленность; аэродромные операции при низкой видимости; контроль захода на посадку на параллельных ВПП; для других приложений: управление наклоном глиссады/управление порогом ВПП; обеспечение данных для контроля шума; данные для использования в аэропорту; данные для использования на воздушной трассе; сопровождение полета; расширенная ситуационная осведомленность (пометка преград, запрещенные зоны); расширенные данные всего полета для улучшенных поисковых и обзорных действий. Характеристика системы МПСН Характеристика системы MLAT представлена в таблице 1. Преимущества и недостатки МПСН Рассматривая функциональные возможности системы мультилатерации, можно выделить следующие преимущества: 1.Возможность использования любых сигналов (режим «A» или «C», ответы и самогенерируемые сигналы режима «S»), передаваемых существующими приемоответчиками без установки на борт дополнительного оборудования для определения местоположения воздушного судна. Таблица 1. Характеристика типовой ситсемы MLAT Зона действия одной станции: Дальность Азимут Высота Производительность В аэродромной Точность зоне определения Трассовый местоположения: обзор Тангенциальна я чувствительность Приёмник: Динамический диапазон Частота приема Импульсная мощность Передатчик: Частота запроса 50–80 км 360° от 0 до 20 000 м до 500 отслеживаемых целей 10 м (при высоте ЛА 300 м) 15–20 м (при высоте ЛА 1000 м) 30 м (при высоте ЛА 11000 м) минус 120 дБВт 70 дБ 1090 МГц 700 Вт 1090 МГц, 1030 МГц 2.Обеспечение зоны действия на пересеченной местности. Система является модульной в том смысле, что зону действия можно расширить за счет включения дополнительных станций при условии, что общее количество станций не выходит за рамки, условленные технологическими возможностями системы. 3.Наличие высоких показателей точности и частоты обновления. Точность системы можно также в определенной степени контролировать путем размещения принимающих станций. Недостатки МПСН: 1.Воздушные суда должны быть оборудованы работоспособным приемоответчиком. 2.Передаваемый сигнал должен быть правильно обнаружен многими принимающими станциями. Здесь могут возникать проблемы, связанные с поиском подходящих мест для установки приемников, особенно при предоставлении обслуживания на маршруте. 3.Требование в наличии линий связи между удаленными приемников/передатчиков и главным центром обработки данных установками Наземная станция аэродромной многопозиционной системы наблюдения Наземная станция аэродромной многопозиционной системы наблюдения (МПСН-А) предназначена для определения местоположения и управления движением воздушных судов, спецавтотранспорта, технических средств и других объектов, оборудованных ответчиками, находящихся на посадочной прямой и рабочей площади аэродрома (площади маневрирования и перроне, ВПП, рулежных дорожках и местах стоянок воздушных судов). Наземному радиоизлучающему оборудованию, устанавливаемому на аэродромных транспортных средствах, препятствиях или стационарных устройствах обнаружения целей в режиме S, которое используется для наблюдения, присваиваются 24-битовые адреса. Наземная станция широкозонной многопозиционной системы станция широкозонной многопозиционной системы наблюдения Наземная наблюдения (МПСН-Ш) предназначена для определения местоположения и управления движением воздушных судов, оборудованных бортовыми ответчиками, работающими в международном диапазоне (в режимах А/С и S), в верхнем и нижнем воздушном пространстве. 7. Автоматическое зависимое наблюдение АЗН является перспективной базовой технологией в соответствии с принятой ИКАО концепцией развития средств связи, навигации, наблюдения и организации воздушного движения (CNS/ATM) и способом обеспечения безопасности воздушного движения в регионах со слабой аэронавигационной инфраструктурой. В отличие от радиолокационных средств наблюдения наземные станции АЗН обладают низким энергопотреблением, значительно меньшей стоимостью, не имеют в своем составе подвижных и вращающихся конструкций, обеспечивают большую точность позиционирования ВС, обеспечивают поле наблюдения за ВС на малых и предельно малых высотах. По своей сути АЗН призвана заменить вторичную радиолокацию. ПРИНЦИП РАБОТЫ АЗН представляет собой безрадарный метод наблюдения воздушных судов (ВС), при котором ВС автономно, при помощи средств спутниковой навигации ГЛОНАСС/GPS, определяет свое местоположение, может уточнять его при помощи ЛККС и в соответствии с некоторым протоколом сообщает в радиовещательном режиме о своем положении всем участникам воздушного движения и иным заинтересованным пользователям. Автоматическое, так как работает автоматически и не требует вмешательства оператора. Зависимое, потому что информация полученная системой АЗН и передаваемая на рабочее место диспетчера зависит от оборудования на борту ВС (FMS) и ГНСС. АЗН позволяет пилотам и диспетчерам видеть одну и ту же картину происходящего, что повышает взаимопонимание между всеми участниками движения, повышая тем самым безопасность и гибкость УВД. В результате АЗН с высокой точностью обеспечивает наблюдение без использования наземных радаров при существенно меньших затратах. Также у диспетчера появляется возможность получать не только координатную информацию, но и информацию об углах пространственной ориентации ВС (курса, крена, тангажа, пикирования). В дополнение к высоте транспондер АЗН может транслировать барометрическую высоту, а также данные радиовысотомера (при сопряжении этих приборов с бортовым индикатором). Это повышает надежность определения высоты и обеспечивает одинаковые правила эшелонирования для ВС как оснащенных, так и не оснащенных АЗН. Кроме того, данные от инерциальной навигационной системы могут использоваться для защиты от сбоев СРНС, а также для получения координатной информации при нахождении ВС вне зоны видимости спутников СРНС. ПРИМЫКАЮЩИЕ ПРИМЕНЕНИЯ Важнейшими примыкающими применениями являются: - TIS-B (Traffic Information Service - Broadcast) - передача на борт данных о воздушной обстановке, полученных органами УВД от других систем (например, вторичная радиолокация), в результате оборудованное АЗН-В "In" воздушное судно видит как оборудованные, так и не оборудованные АЗН-В воздушные суда; Метод TIS-B применяется в основном для извещения наземными службами воздушных судов оборудованных аппаратурой АЗН-В об воздушных судах, не имеющих такого оборудования по данным наземного радиолокатора с помощью трансляции с наземной станции сообщений аналогичных АЗН-В на частоте 1090 МГц [4]. Эта метод был создан на переходный период внедрения АЗН-В (в России это стандарты 1090ES и VDL-4). После завершения перехода к АЗН-В всех воздушных судов и наземных служб этим методом будут также работать с воздушными судами, которые утратили возможности трансляции АЗН-В сообщений неправильную информацию о или передают себе. - FIS-B (Flight Information Service - Broadcast) - передача на борт информации о погоде (METAR) и аэронавигационной информации (NOTAM и др.) в текстовом или графическом виде; - A-SMGCS - информация о движении ВС и других транспортных средств на аэродроме; - DGNSS – возможность приема от наземной станции АЗН-В, либо от ЛККС (локальная контрольно-корректирующая станция) сигнала достоверности спутникового сигнала ГЛОНАСС/GPS и дифференциальных поправок для обеспечения навигации в районе аэродрома и точного захода на посадку; - реализация цифрового канала связи пилот-диспетчер (CPDLC), а также пилот-авиакомпания; - обеспечение поисково-спасательных операций; - обеспечение вихревой безопасности, когда генерирующее вихри воздушное судно передает, а летящие сзади воздушные суда принимают информацию о размерах и интенсивности вихревой зоны; - передача по каналу «борт-земля» оперативной информации о техническом состоянии ВС и параметрах работоспособности бортовых систем. НЕДОСТАТКИ СИСТЕМЫ Помимо очевидных преимуществ, у АЗН есть ряд своих недостатков, а именно: a) она зависит от надлежащей оснащенности всех воздушных судов. Это может быть серьезной проблемой, так как требуется установка и сертификация навигационного средства, способного предоставлять информацию о местоположении и скорости наряду с указанием на целостность и точность такой информации; б) существующие установки при получении данных о местоположении и скорости полагаются исключительно на GNSS. Поэтому возможны отказы в случаях, когда уровень характеристик или геометрия спутниковой группировки недостаточны для поддержки того или иного вида применения. Этот недостаток должен быть устранен в будущих системах, позволяющих интегрировать информацию GNSS с данными от других навигационных датчиков. Кроме того, появление системы Галилео должно улучшить работу GNSS; в) следует предусмотреть возможность проверки точности передаваемых данных о местоположении. И, наконец, еще один существенный недостаток: как подтвердили исследования ведущих западных организаций по связи, АЗН на базе 1090ES абсолютно беззащитно от несанкционированного вмешательства. С помощью несложного технологического оборудования могут посылаться ложные сообщения АЗН («фантомы») о положении ВС в воздушном пространстве, при этом не существует средств в рамках АЗН-В 1090ES отсеять «фантомы» от истинных сигналов. Таким образом, развертывание АЗН-В 1090 ES потребует сохранения и дополнительного развития наземной инфраструктуры вторичной радиолокации для частичного решения вопросов кибербезопасности (но тогда теряется главный смысл введения АЗН-В), либо разворачивания новой, не менее дорогой системы мультилатерации. Наземная станция контрактного автоматического зависимого наблюдения Наземная станция контрактного автоматического зависимого наблюдения АЗН-К предназначена для наблюдения за воздушными судами при приеме информации с борта воздушного судна, имеющего соглашение на передачу данной информации органу управления воздушным движением. Информация о местоположении формируется на борту воздушного судна и передается по линиям передачи данных следующих типов: - спутниковая линия передачи данных; - линия передачи данных в очень высокочастотном (ОВЧ) диапазоне; - линия передачи данных в высокочастотном (ВЧ) диапазоне; - другие линии передачи данных. Принимаемая информация по наземным сетям связи передается в орган управления воздушного движения, под управлением которого в данный момент времени находится воздушное судно. Наземная станция радиовещательного автоматического зависимого набюдения Наземная станция радиовещательного автоматического зависимого наблюдения АЗН-В предназначена для наблюдения за воздушными судами при приеме информации с борта воздушного судна о его местоположении, а также другой дополнительной информации, передаваемой по линии передачи данных (ЛПД) в вещательном режиме. К таким линиям передачи данных относятся ЛПД режима «S» ВРЛ, ЛПД расширенного сквиттера («1090ES»), ЛПД в ОВЧ диапазоне четвертого режима и другие. 8. Автоматический радиопеленгатор Автоматический радиопеленгатор АРП предназначен для выдачи информации о пеленге на воздушное судно относительно места установки антенны радиопеленгатора по сигналам бортовых радиостанций в центры (пункты) ОВД. Результаты измерения азимута используются диспетчерами для УВД, управления посадкой и, в частности, для идентификации отметок от ВС на экранах РЛС (т.е. для определения принадлежности той или иной отметки определенному ВС). Они могут быть переданы на ВС и использованы экипажем для самолетовождения. Антенные системы АРП, работающих в радиосетях "Подхода", "Круга" и "Посадки", ориентируются по магнитному меридиану, а антенные системы АРП, работающих в радиосетях РДП, - по истинному меридиану. Антенные системы двухканальных АРП, работающих в сетях "Подход", "Круг", "Посадка" и РДП одновременно, ориентируются по магнитному меридиану. При этом шкала индикатора АРП, установленного на рабочем месте диспетчера РДП, выставляется с учетом магнитного склонения и позволяет непосредственно определять истинный азимут ВС. Диапазон рабочих частот АРП совпадает с диапазоном частот, выделенным для авиационной связи, и располагается в пределах от 118 до 136 МГц. Точность пеленгования составляет 3. В новых пеленгаторах доплеровского типа ее удается уменьшить до 1. Дальность действия АРП зависит от высоты полета ВС и при пеленговании бортового радиопередатчика мощностью 5 Вт равна 150 км при высоте полета 3000 м и 80 … 100 км при высоте 1000 м. Продолжительность измерений составляет 3 … 5 с. Существуют одно-, двух-, четырех-, восьми- и 16-канальные АРП. Последние позволяют вести одновременное пеленгование нескольких ВС. Радиопеленгаторы получили широкое распространение, так как они не предполагают использования на ВС специального оборудования, а бортовые РС МВ устанавливают на ВС всех типов. Основные характеристики типовых АРП ГА представлены в табл.8. Таблица 8 Характеристики типовых АРП Характеристика Диапазон частот, МГц Зона обзора в вертикальной плоскости, град Дальность действия, км: Н = 300 м Н = 1000 м Н = 3000 м Н = 10000 м Погрешность пеленгования (2), град Число каналов: рабочих резервных АРП-7(6) 118…136 АРП-75 118…136 АРП-80 118…136 - 38 60 80 150 6 100 180 300 2 65 120 200 3 1(2) - 8 2 1 или 2 1 или 0