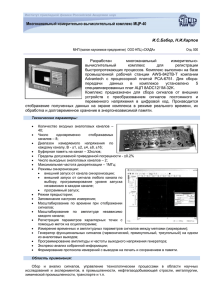
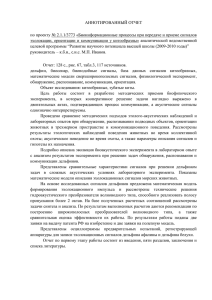
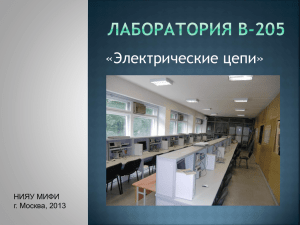
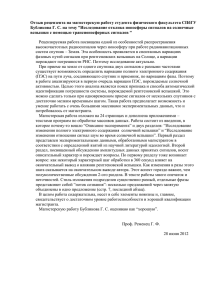
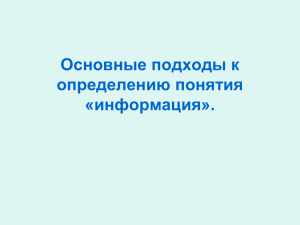
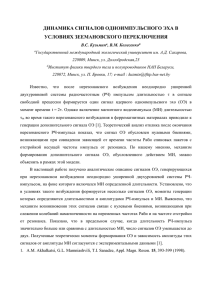
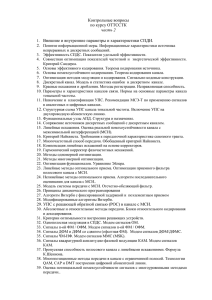
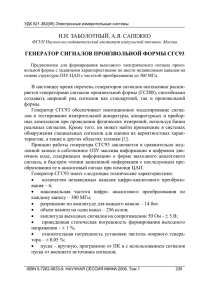
1.3.6. СИСТЕМА МИКРОПРОЦЕССОРНОЙ ЦЕНТРАЛИЗАЦИИ ЭЦ-ЕМ Система микропроцессорной централизации ЭЦ-ЕМ на базе вычислительного комплекса УВК-РА была разработана институтом «Гипротранссигналсвязь» и ОАО «Радиоавионика». Структура: структура системы будет подробно рассмотрена в следующей главе. По тину интерфейса: релейный, но также ведутся работы по разработке системы с бесконтактным интерфейсом, что и будет рассмотрено в основной части дипломного проекта. По расположению аппаратуры: система ЭЦ-ЕМ является централизованной, т.е. УВК, релейные и кроссовые стативы находятся на посту ЭЦ. По способу централизованным вычисления вычислением зависимостей: зависимостей. система ЭЦ-ЕМ Посредством - с одного комплекта УВК на станции может быть централизовано до 100 и более стрелок. По совместимости вычислительного ядра с объектными контроллерами: ядро отделено от системы объектных контроллеров. По способу обеспечения безопасности: структура системы ЭЦ-ЕМ предполагает трёхканальное резервирование составных частей УВК РА на каждом уровне обработки информации от АРМ ДСП до устройств сопряжения с напольным оборудованием. У вычислительного ядра и локальных контроллеров используется принцип «2 из 3». В настоящее время системой ЭЦ-ЕМ оборудовано около 2000 стрелок. 2. СИСТЕМА ЭЦ-ЕМ. 2.1. ИСТОРИЯ РАЗВИТИЯ СИСТЕМЫ. Первая отечественная система микропроцессорной централизации (ЭЦЕ) была введена в эксплуатацию в 1997 году на станции Шоссейная Октябрьской ж.д. В качестве технической основы для реализации функций ЭЦ разработчиком системы – институтом Гипротранссигналсвязь - был 1 выбран управляющий вычислительный комплекс УВК ПС 1001 (производитель НИИУВМ г. Северодонецк, Украина). УВК ПС 1001 представлял собой троированный вычислительный комплекс. На уровне подсистемы ввода-вывода УВК ПС 1001 был доработан с учётом релейного интерфейса с исполнительными схемами и требований безопасности. Доработка вычислительного комплекса потребовала большое количество реле в пересчёте на одну централизованную стрелку. В системе ЭЦ-Е этот показатель был равен 40 реле. Принимая во внимание это обстоятельство, а также сложности, возникшие с обеспечением УВК ПС 1001 запасными модулями и ремонтом модулей вышедших из строя, было принято решение разработать новый управляющий вычислительный комплекс. Такой специализированный УВК был создан по заказу МПС РФ в ОАО "РАДИОАВИОНИКА" с использованием самых современных методов построения отказобезопасных систем. Новый УВК, получивший наименование УВК РА, обладал рядом преимуществ: применение современной элементной базы; наличие функции самодиагностики; повышение надежности; упрощение технического обслуживания. На базе алгоритмического обеспечения системы ЭЦ-Е и отечественного управляющего вычислительного комплекса УВК РА микропроцессорная централизация стрелок и сигналов была модернизирована и получила наименование ЭЦ-ЕМ. Система ЭЦ-ЕМ впервые была введена в опытную эксплуатацию в октябре 2000 г. на ст. Новый Петергоф Октябрьской железной дороги. На последующих станциях она была дополнена функциями микропроцессорной автоблокировки с тональными рельсовыми цепями и централизованным размещением оборудования АБТЦ-ЕМ. 2 На сегодняшний день система является второй по масштабам внедрения на сети российских железных дорог после системы Ebilock-950. Системой оборудовано около 2000 стрелок. 2.2. ОПИСАНИЕ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ. Система микропроцессорной централизации стрелок и сигналов на базе управляющего вычислительного комплекса УВК РА (ЭЦ – ЕМ) предназначена для централизованного управления объектами низовой и локальной автоматики - стрелками, сигналами, переездами и т.д. - на железнодорожных станциях с целью организации и обеспечения безопасности движения поездов. Система ЭЦ - ЕМ применяется на малых, средних и крупных станциях (узлах, раздельных пунктах и разъездах) с поездными и маневровыми передвижениями магистрального и внутризаводского железнодорожного транспорта России и стран ближнего зарубежья. Система ЭЦ - ЕМ осуществляет в реальном времени сбор, обработку и хранение технологической информации о текущем состоянии объектов микропроцессорной централизации. На основании полученной информации реализуются технологические алгоритмы централизованного управления станционными объектами низовой и локальной автоматики с формированием и выдачей управляющих воздействий, и, при необходимости, сообщений дежурному по станции (ДСП). При этом производится непрерывная диагностика состояния технических средств системы с формированием и оперативной передачей в ПЭВМ рабочего места ДСП, информации для отображения состояния объектов МПЦ и результатов диагностирования. Централизованное применением управление управляющего системой МПЦ вычислительного на комплекса станции УВК с РА обеспечивает возможность совмещения в одном комплексе технологических функций МПЦ, связи с объектом и связи с оперативно-технологическим персоналом (автоматизированное рабочее место дежурного по станции АРМ ДСП, автоматизированное рабочее место электромеханика СЦБ – АРМ 3 ШН, и другие). Организация связи УВК системы ЭЦ-ЕМ с объектами управления и контроля позволяет обеспечить до 56 контролируемых дискретных входов на один модуль ввода и до 48 управляемых дискретных выходов на один модуль вывода с общим суммарным ограничением по количеству модулей ввода и вывода на один шкаф до 19. Общее количество дискретных входов - до 1080, дискретных выходов – до 790 (в исполнениях УВК РА, содержащих два шкафа УВК). УВК контролирует состояние датчиков при помощи «сухого контакта». Контролируемые параметры являются дискретной информацией, принимающей значения «0»/»1». В качестве датчиков используются контакты реле. Питание устройств ЭЦ - ЕМ осуществляется от двух независимых вводов трехфазной или однофазной сети переменного тока с номинальным напряжением U1н = 380 В или U1н = 220 В соответственно и частотой (501) Гц через систему бесперебойного питания. Возможно применение в качестве одного из источников или как дополнительного источника использование дизель генераторных установок Посредством одного комплекта УВК на станции может быть централизовано до 100 и более стрелок. Решение комплекса задач в УВК и ПЭВМ РМ ДСП системы выполняется непрерывно и циклически. Время цикла – 1 секунда. Время реакции системы на любое внешнее воздействие составляет 2 – 3 секунды. Предусматриваемый срок службы УВК не менее 25 лет (при условии проведения технического обслуживания и замены отдельных блоков и узлов, выработавших срок эксплуатации). В системе ЭЦ-ЕМ реализован релейный интерфейс, поэтому сохранены релейные схемы непосредственного управления и контроля объектами автоматики, которые включают в себя: - схемы управления и контроля стрелками; - схемы управления и контроля светофорами; 4 - схемы контроля рельсовых цепей; - схемы управления кодированием; - схемы управления и контроля оборудованием переезда; - схемы управления и контроля устройствами перегонной автоматики; - схемы управления и контроля по взаимодействию с пунктами технического обслуживания; - схемы управления и контроля по взаимодействию с маневровыми вышками и маневровыми колонками. Такой подход потребовал сохранить в системе 40 реле в пересчете на одну централизованную стрелку. Средствами микропроцессорной техники обеспечена реализация всех функциональных задач СЦБ, необходимых для безопасного управления технологическим процессом на станции, в т.ч.: - установка, размыкание и отмена маршрутов, -поддержание разрешающих показаний светофоров и кодирование маршрутов с проверкой всех условий безопасности, -разделка угловых заездов при маневровых передвижениях, -подача извещения на переезды, включение пригласительного сигнала, индивидуальный перевод и автовозврат стрелок, -искусственное размыкание секций, -установка и снятие макетов стрелок и изолированных участков. Вместе с тем построение системы ЭЦ-ЕМ на базе вычислительной техники позволило дополнить состав традиционных технологических функций ЭЦ целым рядом новых технологических и информационносервисных функций. Среди технологических функций, направленных на повышение безопасности движения и увеличение эффективности управления технологическим процессом на станции, необходимо в первую очередь выделить следующие: логический контроль занятия путей и участков пути маршрутным порядком, и их последующего освобождения маршрутным порядком 5 для исключения возможности повторного открытия светофора на ложно освободившийся (при потере шунта) путь или участок пути; возможность открытия пригласительного сигнала только при условии задания маршрута с проверкой всех условий безопасности, кроме исключенных ДСП под свою ответственность (в т.ч. и контроль положения стрелок), а также проверка всех неснятых условий безопасности при горении пригласительного сигнала, что в конечном итоге повышает безопасность движения при частичной неисправности напольных устройств (рельсовых цепей и стрелок) и снижает в этих случаях психологическую нагрузку на ДСП; прекращение кодирования маршрутов поезда при несанкционированном выезде подвижной единицы на маршрут; проверка свободности всех секций в маневровом маршруте при движении вагонами вперед после вступления подвижной единицы на маршрут (кроме первой секции, прилегающей к занятой); исключение посекционного размыкания маршрута при проезде поездной единицей перекрытого светофора; возможность задания режима автодействия в любом поездном маршруте; индивидуальная выдержка времени для каждого открываемого светофора; индивидуальный отсчет выдержки времени для каждого отменяемого маршрута, размыкаемой секции и др. ограждения приемоотправочных путей, и т.д. К информационно-сервисным функциям, которые реализованы в системе ЭЦ-ЕМ, относятся формирование на экране РМ ДСП различных сообщений о ходе технологического процесса, удобство ввода управляющих команд и др. Важной функцией является протоколирование хода технологического процесса (управляющих действий ДСП, реакции на них системы, состояния постового и напольного оборудования). Перечисленные 6 сведения фиксируются и хранятся в архиве РМ ДСП, защищенном от несанкционированного доступа. Эти сведения могут быть в любой момент извлечены и проанализированы. На основании анализа записей архива о работе напольного оборудования (рельсовых цепей, светофоров, стрелок и т.д.) могут выявляться перемежающиеся неисправности напольных устройств, что дает возможность использования этой информации в АРМ электромеханика. В системе ЭЦ–ЕМ предусмотрено два режима функционирования: - основной режим управления, который осуществляется при полной исправности комплекса устройств системы и предусматривает управление объектами централизации с проверкой всех условий безопасности; - вспомогательный режим управления, который осуществляется при частичном выходе из строя устройств напольного оборудования и предусматривает управление объектами централизации с исключением проверки части условий безопасности по сравнению с основным режимом управления. В этом режиме ответственность в части исключённых условий, связанных с безопасностью движения поезда, берёт на себя дежурный по станции. Ранее используемый режим аварийного управления, который осуществлялся при отказе УВК и предусматривал управление переводом стрелок и пригласительных сигналов в обход УВК без проверки условий безопасности, в настоящее время не используется. 2.2.1. ФУКЦИОНАЛЬНАЯ СТРУКТУРА СИСТЕМЫ ЭЦ-ЕМ. С точки зрения функционального назначения в системе ЭЦ-ЕМ можно выделить четыре основных подсистемы (рис.2.2.1.): - диалоговая подсистема; - подсистема диагностики; - подсистема логических зависимостей; - подсистема управления и контроля состоянием объектов. 7 Диалоговая подсистема обеспечивает отображение информации и взаимодействие оперативного персонала с аппаратурой системы. Через диалоговую подсистему осуществляется связь с вышестоящими системами управления (ДЦ, АПКДК). Подсистема логических зависимостей обеспечивает решение следующих задач: - реализацию центральных зависимостей; - прием запросов от диалоговой подсистемы и передачи информации для отображения; - выработку команд управления в подсистему управления и прием от подсистемы управления информации о фактическом состоянии объектов управления. Подсистема управления и контроля состоянием объектов осуществляет взаимодействие между подсистемой логических зависимостей и объектами управления и контроля. 8 Формирование директив и отображение поездной ситуации Увязка с системами диспетчерского контроля и диспетчерской централизации Диалоговая подсистема Формирование сервисной и диагностической информации Подсистема диагностики Реализация логических зависимостей по централизации и блокировке стрелок и сигналов Подсистема логических зависимостей Сопряжение с напольным оборудованием Подсистема управления и контроля состояния объектов Объекты управления и контроля ЭЦ Объекты управления перегонной автоматики Рис. 2.2.1- Функциональная структура системы ЭЦ-ЕМ Подсистема диагностики обеспечивает контроль исправного состояния всех блоков управляющего вычислительного комплекса, выявление отказов и отключение неисправной аппаратуры. 2.2.2. ТЕХНИЧЕСКАЯ СТРУКТУРА ЭЦ-ЕМ. Технической основой микропроцессорной системы ЭЦ-ЕМ является специализированный управляющий вычислительный комплекс УВК РА. 9 Структура технических средств УВК РА приведена на рис. 2.2.2. В состав УВК входят следующие составные части: 1. Центральное постовое устройство (ЦПУ). 2. Блок связи (БС). 3. Устройство связи с объектом управления (УСО). 4. Модуль безопасного контроля и отключения (МБКО). 5. Рабочее место дежурного по станции (АРМ ДСП). АРМ ДСП2 АРМ ДСП1 АРМ ДСП3 ЦПУ СЦПУ1 СЦПУ2 СБС1 БС2 УСО1 ЦПУ СЦПУ3 СБС2 БС3 БС2 МБКО1 БС3 БС1 УСО2 БС3 БС СБС3 БС1 МБКО2 БС3 БС2 УСО3 БС1 БС2 БС1 МБКО3 Рис. 2.2.2 – Техническая структура системы ЭЦ-ЕМ предназначено для реализации алгоритмов управления маршрутизацией. ЦПУ выполнено как мажоритарно резервированная ЭВМ. При функционировании вычислительного комплекса ЦПУ осуществляет связь с АРМ ДСП и БС. От АРМ ДСП в ЦПУ формируются команды управления, а от ЦПУ в АРМ фактическое состояние объектов управления. 10 На основе информации получаемой от БС вычисляются алгоритмы центральных зависимостей и формируются выходные данные. Блок связи (БС) производит обмен данными с ЦПУ и программное управление устройствами связи с объектами УСО и модулем безопасного контроля и отключения (МБКО). Блок связи также выполнен в виде мажоритарно резервированных ЭВМ. Блок УСО (БУСО) представляет собой пассивное трехканальное устройство с внутриканальным и межканальным контролем. Программное управление БУСО осуществляет БС. В состав БУСО входят: - модули сбора информации (МСИ); - модули выходных усилителей (МВУ); - источник питания МИП. В одном шкафу комплекса может размещаться до 18 триад модулей МСИ и МВУ при следующих ограничениях: максимальное количество триад МСИ – 17, максимальное количество триад МВУ - 9. МБКО является специализированным источником питания модулей выходных сигналов и обеспечивает безусловное отключение питания обмоток управляющих реле по результатам контроля состояния управляющих выходов. УСО, МБКО и БС составляют периферийное устройство УВК РА (ПУ). Количество ПУ определяется проектом и может составлять от одного до восьми. Каждое РМ ДСП содержит три промышленных ПЭВМ, подключенных по дублированному интерфейсу RS-422 к блоку преобразователя интерфейсов (БПИ). РМ ДСП через БПИ получает от ЦПУ контрольную информацию и обобщенную диагностическую информацию, на основе которых обеспечивает формирование команд управления, визуальное отображение процессов управления и обобщенное отображение результатов диагностирования УВК РА. 11 БПИ содержит три субблока преобразователя интерфейсов СПИ1, СПИ2, СПИ3, каждый из них осуществляет программное преобразование пакетов данных, поступающих от ЦПУ по интерфейсу Ethernet в пакеты четырех интерфейсов RS-422 (и обратно для пакетов данных от РМ ДСП), по которым, с учетом дублирования интерфейсов, осуществляется непосредственный обмен с РМ ДСП1 и РМ ДСП2. 2.3. ПРИНЦИПЫ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ. Взаимодействие УВК РА с объектом управления (ОУ) осуществляется через релейную часть системы путем выдачи управляющих воздействий (на обмотки реле 1-го класса надежности) и опроса источников информации (контактов реле). Концепция обеспечения безопасности УВК РА состоит в следующем: одиночные дефекты аппаратных и программных средств не должны приводить к опасным отказам и должны обнаруживаться с заданной вероятностью при рабочих и тестовых воздействиях не позднее, чем возникнет второй дефект, не должно происходить накопление необнаруженных отказов хотя бы в одном канале УВК РА. Безопасность УВК РА на основе требований РТМ 32 ЦШ 1115842.01 – 94 и с учетом особенностей области применения УВК РА должна основываться на следующих технических решениях: - аппаратном резервировании; - использовании принципов «мягкой» синхронизации в работе вычислительных резервированных каналов; - периодическом тестировании и сравнении работы вычислительных каналов; - использовании мер, исключающих возможность возникновения опасных отказов по управляющим выходам; - парафазном представлении входной информации при вводе и хранении данных; - программной обработке диагностических данных и оперативной 12 передаче результатов диагностики на пульт дежурного по станции; - аппаратно – программном переходе в необратимое защитное состояние при неустранимых отказах. Блок центрального постового устройства (БЦПУ) состоит из трех субблоков СЦПУ, реализованных на базе модулей МК3 (рис.2.3.1). БПИ RS-422 2 комплект РМ ДСП СПИ1 1 комплект РМ ДСП E RS-422 СПИ2 E RS-422 СПИ3 E БЦПУ 0 1 2 Ehternet 0 1 2 Ehternet 0 1 2 Ehternet СЦПУ1 СЦПУ2 СЦПУ3 RS-422 0 1 2 3 RS-422 0 1 2 3 RS-422 0 1 2 3 Блок диагностики к ПУ Рис. 2.3.1 Структурная схема БЦПУ Взаимодействие между субблоками осуществляется по последовательному интерфейсу Ethernet. Связь с ПУ осуществляется по 13 интерфейсу RS-422. Связь с РМ ДСП также осуществляется по интерфейсу RS-422 с использованием промежуточного БПИ. Последовательность выполнения основных функций БЦПУ представлена на рис. 2.3.2. Ввод x/ Вывод Y по RS422 Тестиро вание Ввод X/ Вывод Y по RS422 Тестиро вание Тестирован ие Ввод X/ ВыводY по RS422 Тестиро вание Тестирован ие Обмен входными даными Обмен входными данными Выравнивание Выравнивание Выравнивание Вычисление Вычисление Вычисление Обмен выходными данными Обмен выходными данными Обмен выходными данными Сравнение (мажорирование) Сравнение (мажорирование) Сравнение (мажорирование) Рис. 2.3.2 – Последовательность выполнения основных функций БЦПУ После приема из ПУ массивов контрольной информации (КИ) (входных переменных – Х) и диагностических сообщений с целью их проверки и получения входных данных для технологических программ (ТП) происходит межканальный обмен. Если в результате обмена входные данные одного канала будут отличаться от входных данных двух других каналов, то производится корректировка данных («выравнивание» на рис. 2.3.2) по результатам «большинства». Затем осуществляется программная реализация 14 алгоритмов централизации и автоблокировки с выработкой массива управляющей информации (МУИ) (выходных логических переменных – Y). Для сравнения выходных логических переменных также производится межканальный обмен. Результаты сравнения транслируются в каждый СЦПУ для выявления отказавшего канала, т.е. по трём массивам данных вычисляется мажоранта, а затем она сравнивается с результатом работы каждого канала. Если результат сравнения отрицательный, то формируется признак ошибки по данному каналу обработки. Эта информация запоминается каналами обработки и при последующем не сравнении отказавший канал будет переведён в необратимое защитное состояние. Затем по принципу «два из трех» осуществляется вывод в ПУ массивов управляющей информации. Независимо от основного цикла в фоновом режиме постоянно тестируется каждый СЦПУ. В БЦПУ используется системное программное обеспечение ЦПУ, обеспечивающее выполнение ТП, взаимодействие с ПУ и РМ ДСП. При функционировании УВК РА блок БЦПУ с периодом 1 с. обменивается данными с РМ ДСП и всеми ПУ. Контрольная информация получается от ПУ и собирается в массив контрольной информации МКИ. На основе МКИ и команд от РМ ДСП технологические программы в соответствии с алгоритмами централизации и автоблокировки вырабатывают массив управляющей информации МУИ, соответствующие части которого передаются в ПУ. Кроме входных данных БЦПУ получает информацию об отказах и сбоях всех ПУ. МКИ и МУИ проверяются путем сравнения их по трем каналам БЦПУ. Контроль БЦПУ производится также путем периодического тестирования. В случае отказа одного канала функционирование продолжается. После его горячей замены функционирование БЦПУ восстанавливается в трехканальном режиме. 15 Блок связи (БС), включающий три субблока СБС, осуществляет обмен с БЦПУ контрольной, управляющей и диагностической информацией, а также программное управление блока устройства связи с объектом управления (БУСО). Блок связи также выполнен в виде мажоритарно резервированных ЭВМ и отличается от блока ЦПУ только программным обеспечением. Субблоки СБС в рамках блока БС имеют одно и то же программное обеспечение и взаимодействуют между собой при гальваническом разделении, обеспечивая «мягкую» синхронизацию и обмен контрольной, управляющей и диагностической информацией. При «мягкой» синхронизации команды, реализующие одинаковые программы в различных СБС, выполняются не одновременно. Поэтому последствия внешних электромагнитных воздействий в различных каналах независимы и различны. Это позволяет формировать результирующие данные по мажоритарному принципу при функционировании 3-х каналов и по сравнению при функционировании 2-х каналов. Каждый канал БС имеют специальные адресные 13 – разрядные прошивки, кодирующие в коде Хемминга (8 – 13) номер устройства и номер канала. Прошивки используются для адресации при обменах и однозначной идентификации каждого канала в каждом устройстве. Модули МСИ предназначены для сбора дискретной контрольной информации (КИ) о состоянии управляемого объекта. Сбор информации осуществляется с «тройниковых» контактов реле – датчиков. Каждый МСИ содержит ключи групповой коммутации питания 56 тыловых и 56 фронтовых контактов, а также 56 гальванических входов, соединенных с переключающими контактами. Данные, получаемые МСИ на входах при подаче сигналов к фронтовым контактам, сигналов 1-го направления, инверсны данным, получаемым при подаче сигналов к тыловым контактам, сигналов 2-го направления, что позволяет (при исправном МСИ и отсутствии дребезга контактов) осуществить контроль сбора информации на основе использования парафазного кодирования. В 16 целях обеспечения безопасности и безотказности каждый выход датчика подключается к входам трех модулей МСИ, расположенных в разных каналах БУСО. На рисунке 2.3.3 представлена структурная схема приема данных, где H, L – транзисторные ключи, с помощью которых осуществляется выработка сигналов направлений опроса датчиков (H1 и L1 – первое направление, H2 и L2 – второе направление); X1 X56 – входы МСИ, предназначенные для сбора данных о состоянии датчиков ОУ; RG0….RG6 – входные регистры; ДС – контакты датчика состояния ОУ. Из схемы видно, что на ключах 1-го направления и 2-го направления реализуются мажоритарные функции, т.е. два канала из трех могут обеспечить прием КИ. Наличие электрических цепей «обратных связей» в каждом МСИ позволяет на программном уровне осуществлять контроль работоспособности транзисторных ключей направлений. Сбор входных данных происходит в следующей последовательности. При помощи установок сигнала последовательно проводятся два опроса (по направлениям 1 и 2) всех работоспособных МСИ, по окончании которых в массиве входных данных запоминаются данные, соответствующие контрольной информации о состоянии объекта управления, записанные в парафазном коде. Парафазная некорректность данных обнаруживается программно, включается в массив диагностической информации и индицируется миганием красного и зеленого светодиодов на лицевой панели соответствующего модуля МСИ. Следующим шагом обработки КИ является взаимный обмен собранными данными между каналами УСО, в результате которого в СОЗУ каждого из СБС появляются текущие значения по трем каналам (далее: СВ – данные своего канала, Л – левого , П – правого). С учетом парафазности 17 формируются 6 массивов: 3 в прямом коде и 3 в «инверсном» коде. По указанным массивам последовательно вход за входом осуществляется обработка одноименных данных (то есть данных, принадлежащих одному и тому же входу, но размещенных в разных массивах) и формирование текущего массива КИ. При выполнении указанной программной процедуры используются следующие правила выбора результирующих кодов: сигналов если по двум или более каналам парафазные значения принятых оказываются одинаковыми, то результирующему коду присваивается это значение (мажорирование данных путем выбора 2 из 3-х); - если значения одноименных сигналов, полученных по трем каналам, полностью отличны друг от друга, то выбор результирующего кода осуществляется следующим образом: при наличии в любом из входных наборов кода «1-1» (нарушение парафазности) результирующему коду присваивается значение «1-1», в противном случае – «0-0» (т.к. в одном из входных наборов будет обязательно присутствовать нарушение парафазности с кодом «0-0»). Сбор входных парафазных данных, а, следовательно, и процедура их обработки производятся трижды за рабочий цикл УСО. В рабочем цикле ПУ выполняется три процедуры сбора входных данных от ОУ. После каждой из них происходит подготовка массива данных МСИ («МСИ.МЭ») для передачи в БЦПУ. Процесс подготовки происходит в соответствии со следующим алгоритмом: 1) взаимный обмен массивами «МСИ.ВХ» между СБС (формирование в ОЗУ массивов данных левого, своего и правого канала «МСИ.ВХ.Л», «МСИ. ВХ.СВ», «МСИ. ВХ.П»); 2) формирование по принципу «2 из 3-х» по 3 каналам с учетом парафазности кодирования текущего массива «МСИ.ОСР». 18 3) подготовка массива «МСИ.МЭ» для передачи в ЦПУ на основе данных, сформированных в течение трех последних процедур сбора («МСИ.ОСР 1», «МСИ.ОСР 2», «МСИ.ОСР 3»). Для контроля правильности работы СБС по сбору входных данных от ОУ используется метод поиска константных неисправностей типа «ложная единица» в массивах «МСИ.ВХ.СВ», «МСИ.ВХ.Л» и «МСИ. ВХ.П», по отношению к которым организованы три счетчика ошибок, условно обозначенных как СЧ.МСИ.СВ (отдельный для каждого модуля), СЧ.МСИ.Л и СЧ.МСИ.П (общие, для канала в целом). Контроль проводится на основе сравнения одноименных битов данных, взятых из «МСИ.ВХ.СВ», «МСИ.ВХ.Л» и «МСИ.ВХ.П». При проведении последовательного побитного контроля данных получение первого же отрицательного результата приводит к наращиванию соответствующего счетчика (значение счетчика увеличивается на 3), а процедура контроля прерывается (при контроле «своих» данных происходит переход к данным следующего модуля, при контроле данных соседнего канала - контроль прерывается полностью). При положительном исходе значение соответствующего счетчика уменьшается на 1. При достижении счетчиком СЧ.МСИ.СВ для определенного модуля значения 9 (эквивалентно возникновению ошибок типа «ложная 1» в 3 последовательных циклах сбора данных) модуль МСИ, являющийся источником ошибки, переводится в безопасное защитное состояние, его данные заполняются безопасным кодом. При достижении счетчиком СЧ.МСИ.Л (СЧ.МСИ.П) значения 12 (эквивалентно возникновению ошибок типа «ложная 1» в 4 последовательных циклах сбора данных) соседний СБС признается неисправным. В этом случае со стороны исправного СБС следует остановка процедуры управления модулями МБКО, которые расположены в неисправном канале ПУ, программное «обнуление» данных, поступивших из этого канала и исключение связи с ним. 19 +24 В МСИ 1 канала Н1 Направление 1 L1 Х1 Х56 H2 L2 RG0 … RG6 МСИ 2 канала Н1 L1 Направление 2 H2 L2 RG0 … RG6 МСИ 3 канала RG0 … RG6 Рис. 2.3.3 – Структурная схема приема данных Рисунок 2.3.3 - Структурная схема приема данных от датчика ОУ. Модули МВУ предназначены для формирования сигналов, 20 обеспечивающих включение или отключение обмоток управляющих реле ОУ. Кроме того, в МВУ формируются импульсные сигналы управления для модулей МБКО в БУБКО. Общее количество выходных сигналов управления обмотками реле в одном МВУ – 48, количество выходов управления МБКО – 3. Схема формирования выходного сигнала и защиты от импульсных помех МВУ представлена на рисунке 2.3.4. + 24В (от МБКО) Т1 Д1 А Д2 ОСО ОС от МБКО Рис. 2.3.4 - Схема формирования выходного сигнала и защиты от импульсных помех МВУ Транзистор Т1 получает питание от одного из модулей МБКО, и используется как ключевой элемент для формирования сигнала на выходе МВУ. В точке «А» осуществляется объединение по принципу монтажного ИЛИ одноименных выходов МВУ, каждый из которых принадлежит одному из каналов. Такое соединение позволяет обеспечить отказоустойчивую работу по управляющим выходам. Разделительный диод D1 служит для разделения цепи формирования управляющего сигнала данного модуля (соответственно, обратной связи ОС) 21 от цепей формирования управляющих сигналов модулей других каналов, объединенных в точке «А» (соответственно, обратной связи ОСО). Посредством анализа сигналов в цепях ОС и ОСО осуществляется контроль состояния цепи управления и идентификация МВУ при «пробое» выходного элемента. Защитный стабилитрон D2 предназначен для защиты выхода МВУ от импульсных помех, а также от выброса отрицательной полярности при работе на индуктивную нагрузку (обмотку реле Р). Блок УБКО представляет собой специализированные источники питания выходных каскадов модулей МВУ и обеспечивает отключение питания по результатам контроля состояния управляющих выходов БУСО. В состав блока УБКО входят модули безопасного контроля и отключения питания (МБКО). В каждом модуле МБКО имеется устройство, формирующее напряжение питания выходных каскадов МВУ (Uвых). Нагрузочная способность по этому выходу МБКО рассчитана на возможность обеспечения питания для выходных каскадов одного МВУ. Таким образом, число модулей МБКО в периферийном устройстве равно числу модулей МВУ. Основной задачей МБКО, связанной с осуществлением безопасного функционирования БУСО, является обеспечение оперативного (в течение примерно 37 мс) снятия напряжения Uвых по результатам программного контроля состояния управляющих выходов МВУ. Указанный контроль проводится за счет наличия в МВУ цепей «обратных связей» - ОС и ОСО. На рисунке 2.3.5 на примере триады модулей МВУ и МБКО представлена схема для реализации одного выходного канала управления состоянием обмотки реле, где Р – одно из реле, принадлежащее объекту управления и предназначенное для формирования непосредственного воздействия на напольные устройства. 22 Особенности построения выходных каналов управления УВК РА, а также принципы взаимодействия модулей МБКО и МВУ в пределах любой триады заключаются в следующем: Каждый модуль МБКО вырабатывает питающие напряжения Uпит и Uвых только для одного из МВУ. Процессор СБС через расположенные в МВУ «своего» канала регистры принимает участие в управлении всеми МБКО триады. На рассматриваемой схеме сигналы управления модулями МБКО условно обозначены как СВ (свой) – управление МБКО.СВ, П (правый) – управление МБКО.П, Л (левый) – управление МБКО.Л. Необходимое условие для возобновления процесса формирования Uвых (на очередные 37 мс в каждом из МБКО) - появление положительного фронта сигнала на входе, на который поступает импульсная последовательность от МВУ «своего» канала (Uвх1), а также появление положительного фронта сигнала на входе, на который поступает импульсная последовательность от МВУ «правого» или (и) «левого» канала (соответственно Uвх2 и Uвх3). Следовательно, при отрицательном результате контроля состояния управляющих выходов МВУ соответствующий модуль МБКО может быть отключен (не созданы условия формирования Uвых) со стороны «своего» СБС и, по крайней мере, одного из «соседних». Общий сигнал по любому из выходных каналов управления УВК РА (на рассматриваемой схеме выход управления в каждом МВУ представлен оконечным транзистором УПР) формируется «монтажным ИЛИ» по трем сигналам, поступающим от одноименных выходов МВУ. Так как в любом из модулей выходных усилителей имеется 48 выходов управления типа УПР, то на основе каждой триады МВУ может быть создано до 48 отказоустойчивых каналов управления УВК РА. Кроме напряжения Uвых, в каждом МБКО по тому же принципу (но с временем формирования равным примерно 1,5 сек) вырабатывается напряжение питания выходных каскадов управления МБКО (Uпит). Таким образом, при отсутствии Uпит на выходе модуля МБКО не может быть 23 сформирована последовательность Uвх1, а, следовательно, отсутствуют условия формирования Uвых. Первоначальное включение МБКО в рабочий режим может производиться только по внешнему сигналу включения, поступающему от кнопки, расположенной на лицевой панели модуля, или от кнопки, расположенной на пульте управления УВК РА. При поступлении указанного сигнала в МБКО формируется напряжение Uпит на время, не превышающее 1,5 сек, то есть создаются условия для появления Uвх1. В дальнейшем процесс выработки питающих напряжений может быть поддержан только за счет импульсных последовательностей на входах МБКО. Вывод управляющих сигналов организован следующим образом: По результатам работы технологических программ в БЦПУ формируется массив управляющей информации (УИ). Соответствующая часть массива передается в ПУ и, в случае отсутствия неисправности, записывается в МВУ. Основной причиной возможного возникновения опасного отказа – это появление «ложной 1» на выходе МВУ на время, большее 50 мсек, при наличии логического нуля в УИ. Возникновение такой ситуации может произойти по следующим причинам: - искажение массива УИ, хранящегося в ОЗУ одного из каналов ПУ. - искажение сигналов на управляющих выходах МВУ. В целях обеспечения безопасности при управлении МВУ выполняются следующие действия. Во-первых, для исключения возможности вывода искаженных данных производится межканальный обмен массивами УИ. По результатам обмена массивами данных, предназначенными для вывода в МВУ, формируются 3 массива: «МВУ.СВ» (данные, хранящиеся в своем канале), «МВУ.П» (данные, передаваемые для контроля правым каналом) и «МВУ.Л» (данные, передаваемые для контроля левым каналом), а также массив «МВУ.МЭ», получаемый путем побитного мажорирования данных массивов «МВУ.СВ», «МВУ.П» и «МВУ.Л». После формирования «МВУ.МЭ» производится 24 АКК Uпит МВУ 1 канала МБКО СВ П 1.СВ 1.СВ Uвх1 1.П 3.П Uвх2 2.Л Uвх3 Л 1.Л УПР ос Uвых АКК осо МВУ 2 канала Uпит МБКО 2.СВ Uвх1 1.П Uвх2 3.Л Uвх2 СВ 2.СВ П 2.П Л 2.Л УПР ос Uвых осо АКК МВУ 3 канала Uпит МБКО 3.СВ Uвх1 СВ 3.СВ П 2.П 3.П 1.Л Л Uвх2 Uвх3 3.Л УПР ос Р Uвых осо Рис. 2.3.5 – Структурная схема вывода сигнала управления последовательное сравнение с ним данных «МВУ.СВ», «МВУ.П» и 25 «МВУ.Л». Обнаружение несовпадений между «МВУ.МЭ» и «МВУ.СВ» расценивается как ошибка памяти своего канала, и на этом основании производится попытка перезагрузки СБС своего канала. В случае если ошибка в данных не будет обнаружена средствами своего канала, то в трехканальном режиме соседние каналы обеспечат его перезагрузку, в двухканальном режиме будет попытка перезагрузки СБС обоих каналов. Во-вторых, для обнаружения и быстрого снятия «ложной 1» при ее возникновении на выходах МВУ на каждом основном цикле производится контроль выходов. Появление «ложной 1» может быть связано со сбоем в выходном регистре или с пробоем транзистора в выходном управляющем каскаде МВУ. С целью предотвращения перехода «ложной 1» в опасный отказ регулярно (через каждые 40 45 мс.) проводится программный контроль состояния выходных ключей УВК. Основная задача, решаемая в ходе проведения контроля – это выявление «отказавшего» МВУ и оперативное снятие питающих напряжений с его управляющих каскадов. Решению первой части задачи способствует структурное построение модулей МВУ (наличие обратных связей), а решению второй части задачи – использование программно управляемого безопасного формирователя выходного напряжения (МБКО), одним из основных достоинств которого является оперативность перехода из режима формирования напряжения в режим отключения. 2.4. ТИПОВЫЕ СХЕМЫ СОПРЯЖЕНИЯ С НАПОЛЬНЫМИ ОБЪЕКТАМИ. Для сопряжения модулей УВК РА с напольными и постовыми устройствами ЭЦ-ЕМ для управления и контроля их используются реле I класса надежности, установленные на стативах. Соединение УВК РА со стативами осуществляется при помощи экранированного кабеля. 2.4.1. СХЕМА УПРАВЛЕНИЯ И КОНТРОЛЯ СТРЕЛКИ (РИС. 2.4.1.). В микропроцессорной централизации ЭЦ-ЕМ управление стрелочными электроприводами осуществляется при помощи интерфейсных реле по 26 команде из УВК, в котором проверяются все зависимости электрической централизации. Для управления стрелочным электроприводом применена типовая пятипроводная схема управления с электродвигателем переменного тока, без контроля контактами реле свободности стрелочной секции и замыкания стрелки в маршруте, так как эти функции контролирует УВК РА. Управление схемой осуществляет УВК при помощи интерфейсных реле ПУИ и МУИ, подключенных к выходам модулей вывода МВУ. Контроль положения стрелки осуществляется контактами реле ОК и ППС, подключенными к входам модулей ввода МСИ. При необходимости включения реле ПК, МК для использования в схемах, контроль положения стрелок, в таком случае, передается в УВК РА от контактов этих реле. 2.4.2 УПРАВЛЕНИЕ ВХОДНЫМИ СВЕТОФОРАМИ. 2.4.2.1 Схема управления огнями входного светофора выполнена на основании типовых материалов для проектирования 410002 (альбом ЭЦ-122000), с центральным питанием ламп и резервированием постоянным током ламп красного и пригласительного огней от местной аккумуляторной батареи. Схема управления огнями входного светофора с "неправильного" пути аналогична схеме управления огнями входного светофора с "правильного" пути, за исключением отсутствия у данного светофора цепи зеленого огня. Схема управления огнями входного светофора строится с помощью: основного сигнального реле – "С"; сигнального реле зеленого показания – "ЗС"; реле мигающего сигнала – "МГС"; главного маршрутного реле – "ГМ"; реле пригласительного сигнала – "ПС"; реле контроля целостности основных нитей зеленой и желтых ламп светофора – "СО"; общего повторителя огневых реле разрешающих показаний – "РУ"; обратного повторителя основного сигнального реле – "СОП". При четырехзначной сигнализации 27 добавляется реле сигнального показания "один желтый и один зеленый огни" – "ЖЗС". 2.4.2.2 Контроль состояния и показаний входного светофора осуществляется с помощью: реле "КО" – контроля красного огня (в горячем и холодном состоянии); реле "КИ" – контроля исправности схем релейного шкафа входного светофора; реле "КПС" – контроля включения пригласительного сигнала; реле "ЖЗО" – контроля включения верхнего желтого или зеленого огня; реле "2ЖО" – контроля включения нижнего желтого огня (при четырехзначной сигнализации - зеленого огня в показании "один желтый и один зеленый огни"); реле "РУ" – общего повторителя огневых реле разрешающих показаний. При четырехзначной сигнализации на входном светофоре с "правильного" пути включение показания "один желтый и один зеленый огни" осуществляется фронтовыми контактами реле ЖЗС, а показание "один зеленый огонь" - фронтовыми контактами реле ЖЗС и ЗС. 28 29 М С3Ф С2Ф С1Ф 11 51 ПУИ МУИ 31 21 11 12 52 5 3 FU 3 FU FU 32 22 12 42 41 2 1 НПС 4 3 52 121 73 123 122 ФК-75 ППС 53 НМПШ-1200/250 НПС 71 13 11 12 ФК 4 1 ПМПУШ 150/150 3 2 ППС 72 33 31 32 ОК БК 21 ПУИ 22 62 БК-75 МУИ 61 4 КМШ 3000 (2-3) 1 21 72 22 П П 81 83 82 81 62 НПС 61 1 Б11 2 0,5 FU 1Н(N) 12 На 8 комплектов ПХКС1 НПС ППС 11 141 12 113 112 22 ОХКС ПХКС ППС 143 142 113 112 111 ППС 111 Рис. 2.4.1 Схема управления стрелкой ПУ МУ 11 82 12 73 13 23 22 НПС 3 FU 3 FU 112 2Н(N) 123 122 2Н(N) 113 21 11 Л5 Л2 Л3 Л4 Л1 ОК ОК ОХ ПХ 121 111 11 7 3 9 5 1 43 ПУИ 83 2Н(N) 23 22 13 12 Д3-2700 53 МУИ Д3-2700 13 10 6 2Н(N) 12 8 4 2 ОК ОК 21 11 NМК NПК Л5 Л2 Л3 Л4 Л1 М(N) NМУ NПУ к стрелке к соответствующей триаде МСИ Н к соответствующей триаде МВУ 30 Рис. 2.4.2.1 Схема управления входными светофорами 31 Рис. 2.4.2.2 Схема управления входными светофорами 3. УСТРОЙСТВА БЕСКОНТАКТНОГО УПРАВЛЕНИЯ СТРЕЛКАМИ И СИГНАЛАМИ. 3.1 ОПИСАНИЕ И ТЕХНИЧЕСКИЕ ХАРАКТЕРИСТИКИ. Периферийное устройство связи с напольным оборудованием (ПУ) входит в состав управляющего вычислительного комплекса УВК РА и обеспечивает сопряжение вычислительного ядра комплекса – блока центрального постового устройства (БЦПУ) – с объектами низовой и локальной автоматики станций и перегонов при выполнении требований по безопасности и безотказности. Особенностью данного ПУ является реализация управления напольным оборудованием бесконтактным способом (без использования промежуточного релейного интерфейса). Конструктивно ПУ оформляется в виде устройства связи с объектами управления, предназначенного для бесконтактного управления огнями светофоров и электродвигателями стрелочных приводов (УСО БК). Взаимодействие ПУ с БЦПУ осуществляется по трехканальной магистрали RS – 422. Взаимодействие ПУ с объектами контроля и управления осуществляется через силовые модули управления, входящие в состав ПУ и не содержащие релейных интерфейсных схем. На рисунке 3.1.1 представлена структурная схема ПУ, предназначенного для осуществления бесконтактного управления огнями светофоров и электродвигателями стрелочных приводов по командам, поступающим от БЦПУ УВК РА. В шкафу управления ШУП размещены следующие основные блоки: - блок связи (БС); - блок устройства связи с объектом управления (БУСО); - блок устройства безопасного контроля и отключения (БУБКО). В шкафу силовых модулей ШСМ размещены блок силовых модулей (БСМ) и блок высоковольтных фильтров (БВФ). БВФ предназначен для фильтрации помех, которые могут возникать на проводах, подводящих 32 питание выходных каскадов силовых модулей (постоянное напряжение 110В для управления огнями светофоров и 150В для управления связь с БЦПУ (магистраль RS-422) Б С МДВВ CБС БУСО БУБКО 1 ЛК МДВВ 2 ЛК CБС МДВВ 3 ЛК CБС ШУП от силовой питающей установки 110В, 150В БВФ БСМ ШСМ Коммутационное поле ШКП к объектам управления Рисунок 3.1.1 – Структура ПУ 33 электродвигателями стрелочных приводов) от источников, размещенных в питающей установке системы ЭЦ. Для контроля качества силового питания непосредственно в БВФ установлены платы контроля напряжения (КПН) с датчиками контроля пульсаций и устройствами измерения тока для проверки качества изоляции по силовому питанию. Входные сигналы управления в ШСМ поступают от шкафа ШУП. Из шкафа ШСМ выходят силовые кабели для управления объектами. В шкафу ШКП размещено коммутационное поле, позволяющее «развести» силовые цепи от ШСМ по объектам управления (светофоры и стрелочные приводы). БС осуществляет связь ПУ с БЦПУ по последовательным каналам связи RS – 422, обеспечивает прием управляющих команд, передачу контрольных и диагностических дискретного данных, а также ввода/вывода обеспечивает по (МДВВ) управление магистралям модулями, предназначенными для логической обработки данных. БС построен по трехканальной схеме с возможностью взаимного обмена данными, что позволяет обеспечить необходимый уровень безопасности и отказоустойчивости функционирования. БС является аналогом, используемым в УСО УВК РА. В состав БУСО входят модули, предназначенные для формирования логических импульсных сигналов управления объектами на основе команд, поступающих от СБС «своего» канала БУСО, а также модули источников питания. Модули, подсоединяемые к одной из шин МДВВ, образуют один канал БУСО, который в дальнейшем рассматривается как логический канал (ЛК) ПУ. В общем случае в состав каждого ЛК входит один модуль формирования импульсных последовательностей (МФИ), а также логические модули (ЛМ): формирования сигналов управления огнями светофоров (МФСВ); 34 формирования сигналов управления электродвигателями стрелочных приводов (МФСТ). Питание модулей ЛК осуществляется от модуля источника электропитания (МИП), аналогичного модулям МИП, применяемым в УСО УВК РА. В модуле МФИ по командам от СБС осуществляется формирование: - импульсных последовательностей для аппаратной поддержки процесса широтно-импульсной модуляции выходных сигналов управления в логических модулях МФСВ; - сигналов разрешения работы для каждого из модулей МФСВ или МФСТ, находящихся в «своем» ЛК; - импульсов управления модулями безопасного контроля и отключения; - сигналов опроса датчиков контроля пульсаций, дверного запорного устройства, сигнала управления режимом горения индикаторной лампы, а также сигналов теста и сброса датчиков пульсаций. На рисунке 3.1.2 представлена структурная схема модуля МФИ. Модуль МФИ содержит в своем составе следующие основные узлы: - формирователя импульсных последовательностей (ФИП); - дешифратора адресов обращения к регистрам МФИ (ДШ); - синхронизации запуска формирователей (УС); - регистра разрешения (РГР); - гальванического разделения сигналов (УГР); - опроса датчиков пульсаций силового питания (ОПР); - контроля изоляции (ФНЧ, АЦП). Узел ФИП содержит три аппаратно программных формирователя. Каждый из них осуществляет формирование одной импульсной последовательности (ИП). По времени запуск третьего формирователя относительно запуска первого формирователя сдвинут примерно на 3,3мс, запуск второго 35 МДВВ ИП ДШ ФИП К МФСВ (МФСТ) 17 РГР от МБКО УС к МФИ соседних ЛК УГР ОПР АЦ П ФН Ч к платам КПН УГ Р МФИ Рисунок 3.1.2 - Структура МФИ формирователя также на 3,3мс сдвинут относительно запуска третьего формирователя. Импульсы от первого, второго и третьего формирователей предназначены для выработки сигналов с широтно-импульсной модуляцией, соответственно, первой, второй и третьей фазы (выработка трехфазного напряжения). Диаграмма размещения во времени импульсов, формируемых от первого формирователя, представлена на рисунке 3.1.3. Каждый из указанных на 0,1 мс 9,9 мс t DEN1 NCH1 DSN1 STR1 TST1 SBR1 Рисунок 3.1.3 - Импульсная последовательность от первого формирователя DEN1 36 диаграмме импульсов распространяется по отдельному проводу в ЛК и вводится в модули МФСВ и МФСТ, установленные на МДВВ. Таким образом, для распространения в пределах ЛК последовательности от первого формирователя используется шесть проводов. Второй и третий формирователи, в отличие от первого, формируют импульсную последовательность из двух импульсов (DEN2, SBR2 и DEN3, SBR3). Запуск любого из трех формирователей осуществляется по команде от СБС за время, равное примерно 0,1мс после остановки формирователя. Остановка процесса формирования осуществляется аппаратно при выработке в узле ФИП соответствующего импульса SBR. Узел дешифратора ДШ обеспечивает возможность обращения к регистрам МФИ со стороны СБС по шине МДВВ. Узел УС обеспечивает выработку по командам от СБС сигналов запуска формирователей, а также аппаратную синхронизацию запуска на основе аналогичных сигналов от МФИ соседних ЛК. В узле РГР по командам от СБС осуществляется установка или снятие сигналов разрешения работы модулей ЛМ «своего» ЛК (максимальное количество ЛМ в ЛК – 17). Питание выходных элементов РГР осуществляется от соответствующего модуля безопасного контроля и отключения, выключение которого приводит к остановке функционирования всех ЛМ в ЛК. Схема контроля изоляции содержит фильтр низких частот (ФНЧ), аналого-цифровой преобразователь (АЦП) и подсоединяется к платам КПН через узлы гальванического разделения сигналов (УГР). Обмен сигналами синхронизации запуска формирователей между МФИ разных ЛК осуществляется через элементы гальванического разделения сигналов – УГР. Уровень пробивного напряжения по цепям гальванического разделения сигналов – 2,5 кВ, не менее. 37 Структура и выполняемые функции модулей МФСВ и МФСТ одинаковы. Единственным отличием является то, что формирование выходных импульсов в МФСВ синфазно (используется только одна из ИП), поскольку на основе МФСВ осуществляется управление огнями светофоров, а в МФСТ трехфазно (используются все ИП), так как на основе МФСТ осуществляется управление трехфазными электродвигателями стрелочных приводов. В модулях ЛМ осуществляются следующие основные функции: - формирование выходных управляющих сигналов (эти сигналы являются входными для силовых модулей) по командам от СБС; - сбор дискретных и аналоговых сигналов ОС, необходимых для анализа текущего состояния объектов управления (эти сигналы являются выходными для силовых модулей); - обмен данными с СБС по магистрали МДВВ. На рисунке 3.1.4 представлена структурная схема модуля МФСВ (МФСТ). Модуль МФСВ (МФСТ) содержит в своем составе следующие функциональные узлы: - формирователь сигналов управления (УФ); - дешифратор адресов обращения к регистрам (ДШ); - узлы ввода дискретных сигналов обратной связи (ВВ); - узел аналого-цифрового преобразования (АЦП); - узлы гальванического разделения сигналов (УГР). Узел УФ в МФСВ осуществляет формирование модулированных по длительности выходных импульсов управления силовыми модулями, что позволяет обеспечить горения огней светофоров в режимах «День» или «Ночь», или «ДСН», а также обеспечить режим теста для нитей ламповых светофоров. 38 Разрешение от МФИ Разрешение от др. ЛК ИП от МФИ МДВВ … УГР ДШ …. … ЛВК (к силовым модулям) УФ ….. …. ВВ … УГР … Разрешение для др. ЛК АЦП ОС по току от силовых модулей ВВ УГР МФСВ (МФСТ) ОС по напряжению от силовых модулей Рисунок 3.1.4 – Структура МФСВ (МФСТ) Совокупность выходных сигналов управления одной нитью светофора (4 сигнала) или сигналов управления одной линией стрелочного привода (2 сигнала) рассматривается как логический выходной канал (ЛВК). В каждом модуле типа ЛМ обеспечивается возможность формирования 10 ЛВК, что позволяет при использовании МФСВ обеспечить режимы горения по десяти нитям светофора или, при использовании МФСТ, обеспечить управление двумя электродвигателями стрелочных приводов (СТП) при 5-ти проводной схеме подключения. В целях обеспечения контроля работоспособности ЛВК используется узел ВВ для чтения сигналов ОС со стороны СБС. Узел дешифратора ДШ обеспечивает возможность обращения к регистрам ЛМ со стороны СБС по магистрали МДВВ. 39 Другой узел ввода ВВ обеспечивает ввод сигналов ОС по напряжению из силовых модулей. Узел аналого-цифрового преобразования АЦП обеспечивает преобразование аналоговых сигналов, принимаемых от силовых модулей, в цифровой код, предназначенный для передачи в СБС в качестве сигналов ОС по току. Для обеспечения выбора кода, который необходим для кодирования рельсовых цепей, в каждый ЛК устанавливается модуль выходных усилителей, аналогичный модулю, используемому в УСО УВК РА. БУБКО содержит в своем составе три модуля безопасного контроля и отключения (МБКО), предназначенные для выработки и оперативного отключения напряжения, необходимого для работы логических модулей в БУСО, а также МБКО, обеспечивающие работу модулей МВУ, количество которых зависит от исполнения УСО БК. Применяемые в ПУ модули МБКО аналогичны МБКО, которые используются в БУСО, входящего в состав УСО УВК РА. В состав БСМ входят силовые модули (СМ), через которые осуществляется связь с объектами управления, светофорами и стрелочными электроприводами. Для связи со светофорами используются модули управления нитями (МУН), а для связи со стрелочными электроприводами – модули управления стрелкой (МУС). Силовые модули непосредственно связаны с модулями ЛМ. К каждой триаде ЛМ может быть подсоединено до двух силовых модулей (МУН или МУС – в зависимости от типа управляемого объекта). Сигналы с выходов одной триады образуют 10 каналов ЛВК (по 5 для управления каждым СМ). Сигналы с выходов двух СМ (10 каналов СВК), по пять от каждого СМ, используются для непосредственного управления объектами, огнями светофоров или электродвигателями стрелочных приводов. 40 Модуль МУН предназначен для формирования переменного напряжения, необходимого для управления нитями ламп светофора. В модуле МУН осуществляются следующие функции: - формирование выходного переменного напряжения для нитей путем преобразования постоянного напряжения 110В в переменное напряжение 220В (50 Гц) при наличии входных импульсов управления от МФСВ (по соответствующим каналам ЛВК); - формирование дискретных и аналоговых сигналов ОС, необходимых для анализа текущего состояния объектов управления. На рисунке 3.1.5 представлена структурная схема модуля МУН. Модуль МУН содержит в своем составе следующие функциональные узлы: - гальванического разделения сигналов (УГР); - управления силовыми ключами (УУК); - силовых ключей (СКЛ); - пороговых элементов (ПЭ); - датчиков тока (ДТ); - встроенных источников питания (ВИП); - встроенных малогабаритных реле (Р); - усилителя сигнала включения реле (УС). Элементы УГР предназначены для обеспечения связи с модулями МФСВ. Элементы УУК предназначены для преобразования уровней входных дискретных сигналов управления, поступающих от МФСВ, в сигналы с уровнем напряжения, необходимого для работы силовых ключей. СКЛ представляют собой транзисторные ключи, коммутация которых в соответствии с поступающими от МФСВ сигналами управления приводит к формированию переменного напряжения для определенной нити светофора. Использование ДТ и ПЭ обеспечивает формирование сигналов ОС по каждой управляемой нити. Сигналы ОС поступают в МФСВ на входы регистров и АЦП и передаются для программного анализа в СБС. На базе 41 этих данных в СБС принимаются решения о работоспособности той или иной нити. Выход силовых цепей осуществляется через контакты встроенных малогабаритных реле (Р). Сигнал управления обмотками реле для всех выходов поступает от МФСВ на электронный усилитель (УС), который и обеспечивает срабатывание реле. Питание силовой части модуля МУН осуществляется от источника постоянного напряжения (ИПН) 110В. ЛВК МФСВ УУК УГР СКЛ ДТ СВК1 ОС по напряжению для МФСВ Р ПЭ ОС по току для МФСВ УГР Разр. от МФСВ К1 УС ….. СВК2 СВК3 ………………………………… СВК4 СВК5 +11 0В 0В -110В +24В К5 ВИП + 15В + 5В 5В МУН Рисунок 3.1.5 – Структура МУН 42 В одном модуле МУН содержится 5 идентичных каналов (К1…К5) формирования сигналов управления, что позволяет обеспечить 5 силовых выходных каналов (СВК) управления объектами, в качестве которых могут выступать нити лампы светофора. Модуль МУС предназначен для формирования трехфазного переменного напряжения, необходимого для управления работой одного СТП, при наличии на входе импульсов управления от логических модулей МФСТ. В модуле МУС осуществляются следующие функции: - формирование выходного переменного напряжения для СТП путем преобразования постоянного напряжения 150В от ИПН в переменное напряжение; - формирование дискретных и аналоговых сигналов обратной связи, необходимых для анализа текущего состояния объектов управления. На рисунке 3.1.6 представлена структурная схема модуля МУС. Модуль МУС содержит в своем составе следующие функциональные узлы: - гальванического разделения сигналов (УГР); - управления силовыми ключами (УУК); - силовых ключей (СКЛ); - встроенных источников питания (ВИП); - пороговых элементов (ПЭ); - датчиков тока (ДТ); - встроенных малогабаритных реле (Р); - усилителя сигнала включения реле (УС). Элементы УГР предназначены для обеспечения связи с модулями МФСТ. Элементы УУК предназначены для преобразования уровней входных дискретных сигналов управления, поступающих от МФСТ, в сигналы с уровнем напряжения, необходимого для работы силовых ключей. 43 СКЛ представляют собой транзисторные ключи, коммутация которых в соответствии с поступающими от МФСТ сигналами управления для трех фаз приводит к формированию сигналов управления СТП. Использование ДТ и ПЭ обеспечивает формирование сигналов ОС, ЛВК МФСТ УУК УГР СКЛ СВК Л1 к МФСТ ПЭ ОС по напряжению Р К1 Разр.от МФСТ СВК Л2 У С ………………………………… ….. СВК Л3 СВКЛ4 К5 СВК Л5 ДТ дви г. +15 0В УГР ДТ -150В 0В +15В +24В ВИП +5В 5В МУС Рисунок 3.1.6 – Структура МУС 44 которые принимаются в модулях МФСТ и передаются для программного анализа в СБС. На базе этих данных в СБС принимаются решения о работоспособности СТП и цепей его управления. Выход силовых цепей осуществляется через контакты встроенных малогабаритных реле (Р). Сигнал управления обмотками реле для всех выходов поступает от МФСТ на электронный усилитель (УС), который и обеспечивает срабатывание реле. Рассмотренная схема по выходам позволяет осуществить, если это предусмотрено проектом станции, резервирование управления СТП на уровне силовых модулей МУС. Питание силовой части модуля МУС осуществляется от источника постоянного напряжения (ИПН) 150В. В одном модуле МУС содержится 5 идентичных каналов (К1…К5) формирования сигналов управления, что позволяет обеспечить 5 СВК управления, каждый из которых предназначен для управления электродвигателем стрелочного привода по одной из линий (Л1, или Л2, или Л3, или Л4, или Л5). 3.2. ПРИНЦИПЫ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ. Схема соединения блоков в части обеспечения контроля и управления объектами представлена на рисунке 3.2.1. ПУ построено по трехканальной схеме, что позволяет обеспечить необходимый уровень контрольных данных, безопасности а также управления обеспечить и достоверности отказоустойчивость функционирования. ПУ может работать в трехканальном режиме или, при выходе из строя одного (любого) ЛК, в двухканальном режиме. В БУСО также как и в БС используется трехканальное резервирование, что позволяет обеспечить требуемый уровень безопасности и безотказности функционирования. Каждый канал БУСО содержит магистраль МДВВ, к которой подключены модуль МФИ, а также модули ЛМ и МВУ, количество которых может меняться в зависимости от количества объектов управления. 45 БС СБС МДВВ 1ЛК 24В.1 17 R1.1 R1.n От других МФИ МФИ 5В.1 М ИП 24В.1к МФСВ (МФСТ) СВ1 24В.1 СВ1 1 2 К другим МФИ М Б К О 4 5 К БЦ ПУ МДВВ 2ЛК СБС 24В.2 17 От других МФИ МФИ 5В.2 R2.1 R2.n М24В.2к ИП МФСВ (МФСТ) СВ2 24В.2 СВ2 3 4 К другим МФИ М Б К О 1 6 МДВВ 3ЛК СБС 5В.3 24В.3 17 R3.1 R3.n От других МФИ МФИ МФСВ (МФСТ) 24В.1к СВ3 24В.3 СВ3 5 6 К другим МФИ М ИП М Б К О 2 3 МУН (МУС) 5СВК МУН (МУС) 10 ЛВК 5СВК (к светофорам (к стрелочным приводам)) Рисунок 3.2.1 – Схема соединения блоков ПУ По аналогии с УСО УВК РА одноименные (имеющие одинаковые 46 адреса, но расположенные в разных каналах) модули МФИ, ЛМ и МВУ, объединены в триады. Следует отметить, что подключение модулей МВУ к МДВВ и объединение их в триады МВУ, а также подключение соответствующих модулей МБКО, аналогично УСО УВК РА и происходит по тем же правилам. Способ синхронизации, применяемый в ПУ – «мягкая» синхронизация на уровне СБС. Наличие «мягкой» синхронизации между каналами, использование отдельного модуля источника питания в каждом канале, а также элементов гальванического разделения по сигналам взаимных связей в каждом из модулей, позволяет обеспечить независимость каналов БУСО и СБС при функционировании. Питающее напряжение, обеспечивающее работу выходных элементов ЛМ канала БУСО вырабатывается в соответствующем модуле МБКО. Особенностью МБКО является то, что выработка выходного напряжения осуществляется только в том случае, если на входы модуля поступают импульсные последовательности вполне определенного типа. При пропадании входных сигналов МБКО выключается, а выходное напряжение снимается. Следует отметить, что для включения МБКО в работу необходимо вмешательство обслуживающего персонала. Такое свойство МБКО позволяет обеспечивать безопасное необратимое состояние (БНС) для блоков, использующих вырабатываемое МБКО напряжение для своей работы. Входные импульсные последовательности, необходимые для работы МБКО, формируются в модулях МФИ по командам от СБС. На рисунке 3.2.2 представлена структурная схема подсоединения МФСВ к МУН для организации одного канала управления – одного ЛВК. По каждому из сигнальных выходов (на базе транзисторов Т2…Т5) три одноименных МФСВ взаимно связаны по монтажному ИЛИ, что обеспечивает возможность замены неисправного МФСВ без остановки функционирования. 47 Дополнительно в каждом МФСВ имеется транзисторный ключ Т1, через который может быть подано питание на транзисторные ключи Т2…Т5 в МФСВ другого канала. В качестве сигнала УПР для цепи управления транзистором Т1 используется сигнал, формируемый по цепи разрешения для условно «правого» канала в узле УФ. В качестве сигналов для цепей управления транзисторами Т2…Т5 используются соответственно сигналы, формируемые по цепям КЛ1…КЛ4 в узле УФ. Импульс управления на любом из выходов МФСВ (входов МУН) может возникнуть только в том случае, если выработан сигнал УПР на выходе соответствующей цепи «КЛ…»в УФ одного канала и выработан сигнал разрешения на работу ключа Т1 в другом канале, что позволяет обеспечить аппаратно-программным способом принцип формирования сигнала два из двух. Следует обратить внимание, что рассматриваемое соединение модулей конструктивно выполняется внутри шкафа ШУП, то есть выходной сигнал от МФСВ не выходит за пределы ШУП. Кроме того, на входах МУН установлены узлы гальванического разделения (УГР) сигналов. Принятые меры направлены на защиту транзисторных ключей МФСВ от воздействия импульсных помех, что позволяет рассматривать отказы на выходах МФСВ как независимые. Состояние выхода по каждому монтажному ИЛИ может быть программно считано через узлы обратной связи ОС. В каждом рабочем цикле ПУ по каждому из ключей производится тестирование, сопровождаемое чтением сигналов по цепям ОС и их программной обработкой, по результатам которой принимается решение о наличии отказа в той или иной цепи. Оперативность принятие такого решения приводит к отсутствию накопления отказов в ПУ. В МФСВ связь между ключевыми схемами, расположенными в узле УФ, и выходными транзисторами осуществляется через узлы гальванического 48 +U МБКО +5В Т1 УПР МФСВ 1к ОС ГР ОС Т2 УПР УПР УПР УПР +110В ГР Т3 ОС Т4 ОС Т5 ОС . . . ГР . . . ГР ГР К первичной обмотке СТЧ ГР . . . ГР . . . ГР ГР ОС -110В +U МБКО +5В Т1 УПР МФСВ 2к ОС ГР ОС Т2 УПР УПР УПР УПР ГР Т3 ОС Т4 ОС Т5 ОС ГР ГР ГР ОС +U МБКО +5В Т1 УПР МФСВ 3к ОС ГР ОС Т2 УПР УПР УПР УПР ГР Т3 ОС Т4 ОС Т5 ОС ГР ГР ГР ОС Рисунок 3.2.2 – Структурная схема подсоединения МФСВ к МУН разделения сигналов, питание которых обеспечивается от модуля МБКО 49 «своего» канала (сигнал разрешения от МФИ). В случае отказа МФСВ осуществляется его выключение (снимается сигнал разрешения от МБКО), в таблицу состояния заносится код, соответствующий отказу МФСВ, что позволяет в дальнейшем программно «игнорировать» неисправный модуль. Только после замены модуля возможно включение его в работу. Функционирование ЛМ в триаде происходит синхронно, поскольку основывается на формирователей, синхронизации в качестве самих задающих СБС, синхронном генераторов для запуске которых используются кварцевые генераторы. Путем включения в МФСВ то одной, то другой пары ключей (а, следовательно, и выходных транзисторов) осуществляется попеременный перевод в активное состояние соответствующих пар силовых ключей в модуле МУН, что приводит к генерации на выходе силового модуля переменного напряжения, предназначенного для управления нитью светофора через трансформатор типа СТ4. 3.3. ОСОБЕННОСТИ УПРАВЛЕНИЯ СВЕТОФОРАМИ. Яркость свечения нити лампы в светофоре зависит от средней мощности, которая, в свою очередь, зависит от эффективного напряжения, прикладываемого к нити лампы. В данном ПУ эффективное напряжение регулируется путем широтноимпульсной модуляции выходного напряжения силовых модулей амплитуды 220В и частоты 50 Гц. Падение напряжения на проводах для удаленных светофоров компенсируется подбором напряжения с помощью отводов на сигнальном трансформаторе. На рисунке 3.3.1 представлена форма напряжения на выходе одного из силовых каналов управления нитью светофорной лампы в режиме «Тест». Эпюра 1 соответствует режиму тестирования нити, на эпюре 2 показаны моменты снятия данных по цепи ОС через МФСВ. 50 3,3 мс 500 мс ВЫХ МУН 1 t МФСВ 2 Рисунок 3.3.1 - Форма напряжения на выходе одного из каналов управления модуля МУН для режима «Тест» t На рисунке 3.3.2 представлена форма напряжения на выходе одного из силовых каналов управления нитью светофорной лампы в режиме «День». Эпюра 1 соответствует режиму горения нити, на эпюре 2 показаны моменты снятия данных по цепи ОС через МФСВ. Таким образом, режим горения нити регулируется за счет соответствующего изменения длительности положительной и отрицательной полуволны выходного сигнала, то есть используется принцип широтно– импульсной модуляции сигнала. Механизм модуляции работает в узле УФ модуля МФСВ. Следует подчеркнуть, что режим тест используется только при управлении ламповыми светофорами для контроля целостности незадействованных (не находящихся в режиме горения или мигания) нитей. Поскольку в режиме тестирования эффективное напряжение очень мало (длительность генерируемого однократно через каждые примерно 500мс импульса в каждой полуволне около 3,3мс), засветки нити в видимой части спектра не происходит. Формирование сигналов ОС для светофоров по каждому каналу управления нитями обеспечивается наличием в модулях МУН датчиков тока и пороговых элементов. Сигналы ОС (по напряжению и току) поступают на 51 20мс 500 мс ВЫХ МУН 1 t t МФСВ 2 Рисунок 3.3.2 - Форма напряжения на выходе одного из каналов управления модуля МУН для режима «День» t входы триады МФСВ в регистры и АЦП, с которых считываются со стороны СБС для программного анализа. При управлении светофорами между МУН и светофором по каждой из нитей устанавливаются промежуточные сигнальные трансформаторы. На основе собранных данных по ОС при неисправности имеется возможность отличить обрыв в первичной цепи питания нити от обрыва во вторичной цепи (за счет использования соответствующих «программных» порогов при анализе сигналов ОС). Сбор данных осуществляется троекратно в каждом временном отрезке 0,5с. После каждого сбора следует анализ состояния сигналов ОС. Использование троекратного опроса сигналов ОС повышает достоверность принимаемой информации, а также позволяет при анализе использовать метод выбора 2 из 3-х. Далее следует взаимный обмен «вычисленными» результатами и выравнивание их на основе «своего» и «соседних» массивов. Поскольку за процедурой анализа состояния нитей следует выполнение алгоритма формирования «рабочих» кодов, то «вычисленное» текущее состояние учитывается при их выработке. Таким образом, быстродействие в части диагностирования нитей равно примерно 0,5с, что позволяет уже к следующему обмену с БЦПУ сформировать контрольные и диагностические данные. 52 3.4. ОСОБЕННОСТИ УПРАВЛЕНИЯ СТРЕЛКАМИ. В ПУ принято, что при переводе привода в положение «плюс» задействованы линии Л1 (фаза1), Л2 (фаза2), Л5 (фаза3), при переводе в положение «минус» задействованы Л3 (фаза1), Л4 (фаза2), Л5 (фаза3). Логика выработки сигналов в МФСТ для МУС аналогична выработке сигналов в МФСВ для МУН с той лишь разницей, что всегда используется режим полного напряжения (режим день). В первой половине временного отрезка в 20мс (эпюра 1 на рисунке 3.10) со стороны МФСТ подается импульс, предназначенный для формирования положительной полуволны переменного напряжения (10мс), а во второй половине – подается импульс для формирования отрицательной полуволны (10мс). Со стороны модуля МУС в каждый из указанных интервалов формируется соответствующее полуволне напряжение. Это переменное напряжение подается в качестве сигнала управления по силовому проводу к СТП. Формирование сигналов ОС при управлении СТП по каждой управляемой линии обеспечивается наличием в модулях МУС датчиков тока и пороговых элементов. Сигналы ОС поступают на входы триады МФСТ в регистры и АЦП, с которых считываются со стороны СБС для программного анализа. На базе этих данных в СБС принимаются решения о начале и окончании перевода стрелки, о положении стрелки в статическом состоянии, о работоспособности СТП и цепей его управления. 3.4.1. КОНТРОЛЬ ПОЛОЖЕНИЯ СТРЕЛКИ НА ОСНОВЕ СИГНАЛОВ ОС. На рисунке 3.4.1 представлены диаграммы сигналов при проведении контроля положения «плюс». В этом режиме сначала со стороны ПУ формируется длительностью положительная 40мс в линии полуволна Л1, при выходного этом со напряжения стороны с МФСТ осуществляется фиксация состояния по сигналам ОС по всем линиям управления СТП (Л1…Л5), а затем – отрицательная полуволна. Собранные данные заносятся в ОЗУ СБС. 53 80 МС Л1 T Л2 T МФСТ T 500 мс Рисунок 3.4.1 – Контроль положения «плюс» После формирования контрольных сигналов по Л1 СБС осуществляет формирование контрольных сигналов по Л2, также собирая информацию о состоянии сигналов ОС по всем линиям. В целях повышения достоверности данных рассмотренный выше процесс проводится трижды в течение одного РАБЦ (через каждые примерно 500 мс). При анализе данных стрелка считается находящейся в положении «плюс», если при формировании положительной полуволны в Л1 было зафиксировано появление положительного напряжения только по Л2 (рисунок 3.4.1), а при формировании отрицательной полуволны по Л1 было зафиксировано отсутствие напряжения по всем линиям, при формировании положительной полуволны на Л2 было зафиксировано отсутствие напряжение по всем линиям, а при формировании отрицательной полуволны в Л2 было зафиксировано появление отрицательного напряжения только по Л1. В случае контроля положения стрелки «минус» алгоритм работы аналогичен за исключением того, что формирование контрольных импульсов 54 и их контроль после прохождения контрольной цепи привода осуществляется по линиям Л3, Л4. Наличие троекратного опроса сигналов ОС повышает достоверность информации, а также использовать метод выбора 2 из 3-х при анализе данных, который выполняется в конце каждого РАБЦ. После взаимного обмена результатами вычислений и их выравнивании в каждом канале формируется контрольный массив в части контроля положения стрелок. Таким образом, быстродействие УСО БК в части контроля положения составляет примерно 1,5с. 3.4.2. КОНТРОЛЬ ПЕРЕВОДА СТРЕЛКИ НА ОСНОВЕ СИГНАЛОВ ОС. На рисунке 3.4.2 представлен вид напряжений, поступающих на трехфазный двигатель переменного тока стрелочного привода от модуля МУС, а также форма тока в «общем» проводе источника постоянного тока, от которого питаются ключи СКЛ в модуле МУС. При превышении величины тока определенного порога (0,8А) считается, что двигатель вращается. Процесс перевода стрелки начинается с подачи трехфазного питания на двигатель по цепям Л1, Л2, Л5 при переводе в «плюс» или по цепям Л3, Л4, Л5 при переводе в «минус». В цепи питания силового модуля МУС, формирующего эти напряжения, начинает протекать ток. Через каждые примерно 0,5с на одном из интервалов времени в 20мс значения тока двигателя снимаются со стороны МФСТ 6 раз (через каждые 3,3мс). Таким образом, на протяжении каждого РАБЦ процедура съема данных повторяется трижды (в начале, в середине и в конце). В результате считывания информации в ОЗУ формируется три массива состояния датчика сигнала ОС (по 6 значений в каждом). Далее в СБС по каждому из массивов происходит сравнение каждого из шести значений с известным пороговым значением. Считается, что ток перевода протекает, 55 500мс Л1 (Л3) T Л2 (Л4) T Л5 T Ток дв. T МФСТ T Рисунок 3.4.2 – Контроль тока двигателя если, по крайней мере, в двух анализируемых массивах соответствующие шесть значений превышают значение порога. Таким образом, каждый СБС независимо от «соседних», формирует «свою» версию о текущем состоянии анализируемого сигнала ОС. После взаимного обмена и «выравнивания» данных методом сравнения и выбора два из трех в каждом канале формируются контрольные коды для передачи в СЦПУ. Полученные результаты также используются и при формировании рабочих кодов. Анализ собранных данных осуществляется через каждые примерно 0,5с, что определяет быстродействие УСО БК в части контроля перевода стрелок. 3.5. ВЫВОДЫ. Рассмотрев методы и принципы обеспечения безопасности ПУ, предназначенного для осуществления бесконтактного управления огнями 56 светофоров и электродвигателями стрелочных приводов, можно сделать следующие выводы: ПУ построено по трехканальной схеме, что позволяет обеспечить необходимый уровень безопасности управления и достоверности контрольных данных, а также обеспечить отказоустойчивость функционирования; формирование выходного переменного напряжения для нитей ламп светофоров и электродвигателя стрелочных приводов происходит путем преобразования постоянного напряжения в переменное; наличие троекратного опроса сигналов ОС при тестировании и контроле повышает достоверность принимаемой информации. Аппаратное обеспечение и алгоритмы, заложенные в ПУ, позволяют выполнять все необходимые функции. Удалось повысить эксплуатационно-технические характеристики по сравнению с релейной системой, такие как: самодиагностика УСО БК, позволяющая быстро обнаружить и устранить неисправности; отсутствие необходимости в периодическом обслуживании аппаратной части; дальность надежного управления светофором-9 км; контроль целостности нити в холодном и горячем состоянии при большой дальности управления светофором; дальность управления стрелкой до 3 км; повышение достоверности сигналов контроля положения и перевода стрелки; быстрое обнаружение обрыва фазы двигателя (выключение двигателя до начала перевода стрелки); наличие в составе ПУ устройства защиты от перенапряжений УЗ, конструктивно выполненного в виде отдельного шкафа КП, 57 позволяющего повысить уровень защиты устройств от атмосферных перенапряжений. 58