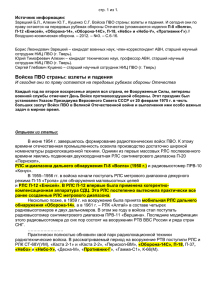
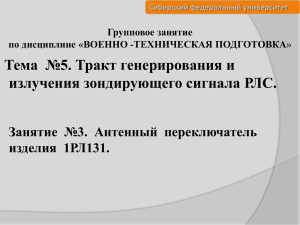
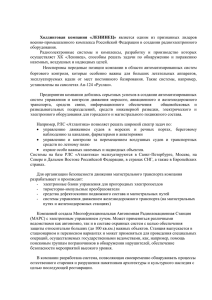
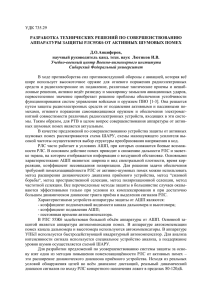
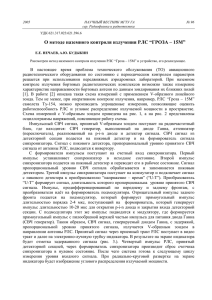
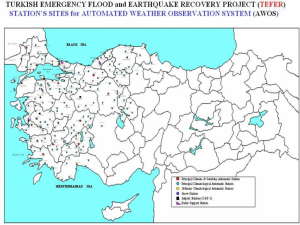
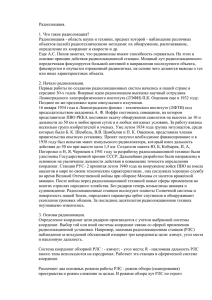
Министерство Образования Украины ОДЕССКИЙ ГОСУДАРСТВЕННЫЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Институт Радиотехники и Телекоммуникаций Кафедра РТС ПОЯСНИТЕЛЬНАЯ ЗАПИСКА к курсовому проекту по дисциплине "Основы теории радиотехнических систем" на тему «Радиолокационная станция обнаружения воздушных целей» Вариант № 16 Выполнил студент группы РС971 Мамлюк В.В. "____" __________ 2002 г. Проверил: Часовой А. Н. "____" __________ 2002 г. Одесса 2002 Наверно, в этом курсовике ошибки есть(мягко говоря) ,так как сдал я его на шару, но с учетом практически полного отсутствия нормальной студентческой информации по радиолокации в Интернете, он просто очень нужный… СОДЕРЖАНИЕ 1. Расчет технических параметров РЛС 2. Выбор и расчет параметров зондирующего сигнала 3. Структурная схема РЛС Приложение 1 Приложение 2 Приложение 3 Список литературы РЕФЕРАТ Радиолокационные системы имеют следующие преимущества перед визуальными: работа РЛС не зависит от наличия оптической видимости и эффективна не только в дневные, но и в ночные часы, в тумане, при должде и снегопаде. Они обеспечивают большую дальность действия и точность измерения координат цели. В данном курсовом проекте проведен расчет РЛС кругового обзора, предназначенной для обнаружения воздушных целей. Данная РЛС может использоваться, например, в аэропортах и подобных учреждениях. Проектируемая РЛС является совмещенной, т.е. использует одну антенну для приема и передачи сигналов. При проектировании был использован критерий минимальной стоимости РЛС, в основу которого положен принцип минимизации общей суммы стоимости антенны и передатчика, при заданных характеристиках обнаружения. Для выполнения этого проекта использована программа, разработаннная на кафедре РТС Одесского Государственного Политехнического Университета, при помощи которой проводится оптимизация параметров РЛС для обеспечения требуемого критерия минимума стоимости. В качестве объекта проектирования выбрана гипотетическая когерентноимпульсная РЛС с аппаратурой селекции движущихся целей. 1. РАСЧЕТ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ РЛС Расчет ширины спектра зондирующего сигнала: f c c 2 D 3 10 8 7,89 * 10 5 Гц , 2 190 (1.1) где D - релеевская разрешающая способность по дальности Выбор времени обзора из условия: Tобз 1 1 10 c , 2 Fв 2 0,05 (1.2) где Fв - верхняя граница спектра траектории движения цели Расчет периода (частоты) повторения импульсов передатчика из условия однозначного измерения дальности: Tп 2Dодн , c (1.3) где Dодн 1,1 D max п - максимальная дальность однозначного измерения. D max п -максимальная дальность обнаружения с учетом затухания. 1,1 7.009737 * 10 5 2.5702369 * 10 -3 мс ; 8 3 10 1 1 fп 389,069 Гц . Tп 2.5702369 10 3 Tп Расчет количества импульсов (число импульсов в пакете), поступающих на вход приёмника РЛС за время облучения цели обл в режиме кругового обзора: N обл , Tп (1.4) Tобз 0.5 , 360 (1.5) где обл - время облучения цели: обл где 0.5 - ширина диаграммы направленности в азимутальной плоскости на уровне половинной мощности ( 0.5 - релеевская разрешающая способность по азимуту) 10 1,6 0,04444 c ; 360 0,04444 N 17,291 17 . 2.5702369 * 10 -3 обл Расчет коэффициента различимости для модели сигнала со случайной фазой и флюктуирующей амплитудой: Bm p q2 , 2 где q 2 - отношение сигнал/шум, рассчитываем по формуле: (1.6) 1 ln P лт1 (1.7) q 2 2 1 , ln 1 Pпо где Pпо - вероятность правильного обнаружения; Pлт1 - вероятность ложной тревоги для одного элемента разрешения зоны обзора. Pлт , m D 360 , m m1m 2 max п D 0, 5 Pлт1 (1.8) (1.9) где m - число элементов разрешения в зоне обзора, равное произведению числа элементов разрешения по дальности m1 и по азимуту m2. 370000 360 4.3815789 * 10 5 ; 190 1,6 0,06 Pлт1 1.3693694 * 10 -7 ; 5 4.3815789 * 10 1 ln -7 q 2 2 1.3693694 * 10 1 772,276 ; 1 ln 0,96 m Bm p 772,276 386.13 . 2 Определение коэффициента потерь дет при некогерентной обработке: Для рассчитанной вероятности ложной тревоги для одного элемента разрешения и рассчитанного количества импульсов определяем параметр y 0 из уравнения: x N1 e x Pлт1 dx , N 1! y0 (1.10) Расчет проведенный на компьютере, показал y 0 37,9587 . Находим требуемое отношение сигнал/шум для одного импульса при некоге2 рентной обработке q нек 1 из уравнения: 2 q нек 1 1 N 2 Pпо 2 N q нек1 2 N 1 y0 exp . 2 N q нек1 1 2 (1.11) Согласно заданию Pпо= 0,94. Подберем q2нек1 для обеспечения Pпо при y0 = 37,9587. q2нек1 = 70 Рпо = 0,938 q2нек1 =75 Рпо = 0,942 q2нек1 =72 Рпо = 0,94 Так как по определению дет характеризует энергетические потери имеющее место при переходе от когерентной к некогерентной обработке, а отношение сигнал / шум в одном импульсе при когерентной обработке q 2 равно: q2 q 2 487,081 40,59 , N 12 (1.12) где q2 рассчитано по формуле (1.7), то дет 2 q нек 1 q 2 72 1,7738 . 40,59 (1.13) Определяем коэффициент потерь в системе L, не включенный в другие параметры уравнения дальности: L = 10 дБ Рассчитаем коэффициент усиления антенны с плоской диаграммой направленности G , ширина главного лепестка диаграммы направленности которой в азимутальной плоскости на уровне 0,5 по мощности равна 0,5 , а в вертикальной плоскости - . Коэффициент усиления параболической антенны с плоским лучом рассчитывается по формуле: G 41000 , 0,5 (0 min ) (1.14) где 0 - угол места, соответствующий максимальной дальности обнаружения : 0 arcsin H max 0,0432567 , Dmax п (1.15) тогда: G 41000 12329,028 . 1,6 (1,719 0,4) Коэффициент усиления косеканс – квадратной антенны, с той же апертурой, как у параболической для заданных параметров зоны обзора меньше чем величина, рассчитанная по (1.14): G csc G 12329 6252 . 2 0 ctg max 2 0,0432ctg 57 (1.16) Расчитаем спектральную плотность шума N0: С этой целью следует выбрать тип активного элемента входного устройства супергетеродинного приёмника РЛС и найти его коэффициент шума Кш . По графикам зависимостей коэффициента шума от частоты для УВЧ на ЛБВ при частоте f = 3 ГГц: Кш = 3,22 дб = 2,1. Значение N0 определяется по формуле (1.17) : N 0 kT0 К ш 1,38 10 23 290 2,1 8,4 10 21 Вт/Гц. где k - постоянная Больцмана, k 1,38 10 T0 290К - стандартная температура. 23 Дж/К, (1.17) Мощность шума на входе приёмника (в полосе f пр ) рассчитывается по формуле: Р ш N 0 f пр , (1.18) где f пр - эффективная ширина полосы пропускания линейного тракта приёмника включающего согласованный фильтр. При согласованой обработке: f пр f c , (1.19) где f c - эффективная ширина спектра сигнала. Ширина спектра сигнала в одном периоде повторения - f c равна: C 3 10 8 f c 789473,68 Гц , 2 D 2 190 (1.20) тогда: Р Ш 8,4 10 23 789473,68 663489470 Вт. Для совмещенной антенны связь между эффективной площадью антенны Апр и коэффициентом усиления Gcsc определяется соотношением: A пр 2 G csc . 4 (1.21) Зададимся начальным значением длины волны зондирующего сигнала = 0,1 м. В дальнейшем, после оптимизации, эта длина волны будет скорректирована. Тогда получим: Aпр 0,01 625 4,9756 м2. 4 Определим значение максимальной дальности обнаружения Dmax которую должна иметь РЛС в свободном пространстве, чтобы ее дальность действия при наличии поглощения радиоволн в атмосфере была равна заданному значению Dmax п. Dmax Dmax п 10 0,05 ( )D , (1.22) где () - коэффициент потерь энергии радиоволн в атмосфере, определяемый по графику в [ ] 0,015 дБ/км. Тогда Dmax 400 10 0,050,015400 800 км. Находим произведение средней мощности передатчика на эффективную площадь антенны: max п D 4max 4 N 0 f п Bm p дет L 2 Q A пр Pср G csc N ц , где ц - эффективная отражающая площадь поверхности цели. 800 4 4 8,4 10 21 340,913 243,54 1,773 10 Q 575989 Втм2. 11228 12 13 2 (1.23) Найдем значение средней мощности передатчика: Pср Q 115567,49 Вт. Aпр (1.24) Найдем стоимость РЛС: C1 Pср csc k2 Aпр 115567,49 2020 4,9756 125568,14 . k1 (1.25) Определим значение средней мощности передатчика и эффективную площадь антенны по критерию минимума стоимости РЛС на первой итерации: Pср опт A пр опт k2 Q 28991 Вт, k1 Q 15,756 м2. Pср опт (1.26) (1.27) Определим теперь значение длины волны, соответствующее рассчитанным величинам. Так как в нашей РЛС используется совмещенная антенна, то G csc и A пр опт связаны соотношением: 4 G csc ~2 A пр опт . (1.28) и следовательно: ~ 4 Aпр опт G csc Проверим выполнение условия: 0,1328 м. ~ и где и Pср Tп Pи max (1.29) 0,01 , 2D min . c (1.30) (1.31) . ~ и 0,1 0,1328 0,1 0,328 115567 2.5702369 10 3 4.950597 10 5 6 10 6 2 Dmin 2 1900 1,266 10 5 8 c 3 10 Так как ни одно из условий не выполняется, проведем оптимизацию параметров на ЭВМ. Значение стоимости РЛС и длины волны на каждой итерации сведены в табл. 1.1. Результаты расчетов до оптимизации и параметров РЛС после проведения оптимизации на ЭВМ приведены в приложении 1. № итерации 1 2 3 4 5 Длина волны на предыдущей итерации 0,1 м 0,134 м 0,12 м 0,125 м 0,124 м Стоимость РЛС на предыдущей итерации 67564 52252 44958 43489 42252 Таблица 1.1 Новая граница длины волны 0,134 м 0,12 м 0,125 м 0,124 м Оптимально Под стоимостью С1 понимают взвешенную сумму 1 Вт мощности передатчика и 1 м2 антенны. В результате оптимизации стоимость РЛС уменьшилась с 67564 до 42252, была получена оптимальная длина волны = 0,124 м, которая больше длины волны до оптимизации ( = 0,1 м). Это приводит к тому, что при фиксированном коэффициенте усиления антенны произошло увеличение ее эффективной площади. Энергетический потенциал станции фиксирован, следовательно при увеличении эффективной площади антенны происходит уменьшение средней мощности передатчика. 2. ВЫБОР И РАСЧЕТ ПАРАМЕТРОВ ЗОНДИРУЮЩИГО СИГНАЛА После оптимизации мы получили базу сигнала равную В = 8. Из-за того, что база сигнала больше единицы возникает противоречие между максимальной дальностью и разрешающей способности по дальности. При использовании простого сигнала это противоречие невозможно обойти, однако использование сложных сигналов позволяет обеспечить требуемые параметры. Наиболее известными сложными сигналами являются фазоманипулированные сигналы (ФМ) и сигналы с линейной частотной модуляцией (ЛЧМ). Из курса лекций М.Б.Свердлика и А.Н.Мелешкевича известно, что при базе сигнала меньше 20 предпочтительней использовать ФМ сигнал. Аналитическое описание фазоманипулированного сигнала имеет вид: M S (t ) cos2 f 0 t mT0 m pt mT0 , (2.1) m 1 1 для m 1T0 t mT0 0 для остальных t где pt mT0 Свойство фазоманипулированных сигналов при заданных М и Т0 полностью описываются кодовой последовательностью: m 1 , 2 ,..., M (2.2) Среди фазоманипулированных сигналов наибольшее распространение получили бифазные сигналы m 0, , которые строятся на базе кодовых последовательностей максимальной длины (КМД) или М-последовательностей X m 0,1. Между значениями m и значениями Xm М-последовательности, имеется однозначное соответствие: m 0, если X m 0 m , если X m 1 Рассмотрим ФМ сигнал для нашей РЛС. f 0 2,439 ГГц 1 1 T0 1,533 мкс f c 0,652 10 6 М-последовательность является переодической с периодом M 2m 1 , который должен быть не меньше базы сигнала. Таким образом В = 7.51 8, и следовательно, М 8. При m = 4 получим М = 15, где m – степень порождающего полинома М-последовательности. Сгенерируем М-последовательность с минимальным уровнем боковых лепестков функции автокорреляции. Величина боковых лепестков зависит от вида порождающего полинома и от начальной комбинации. Воспользуемся таблицами, приведенными в методических указаниях [4]. (2.3) f ( x) x 4 x 3 1 Согласно этому полиному (2.3) и для начальной комбинации 1000, построим структурную схему генератора ФМ сигнала: Делитель частоты ГТИ Тр1 Тр2 ФУИ МТ0 Тр3 Коммутатор Тр4 sin wt + к УМ Рис.2.1 Структурная схема генератора ФМ сигнала Построим М-последовательность, реализованную схемой изображенной на рис.2.1. Результаты сведем в табл.2.1. Х4 Х3 Х2 Х1 Х0 0 0 0 1 1 0 0 1 1 1 1 0 0 1 1 0 1 0 1 1 1 1 0 0 1 1 1 1 0 0 1 1 1 1 0 0 0 1 1 1 1 0 1 0 0 1 1 1 1 1 1 0 1 1 0 1 0 1 1 0 1 0 0 1 0 1 0 1 1 1 0 0 0 0 1 0 1 0 1 1 1 1 0 0 1 0 1 0 1 0 1 1 0 0 0 0 0 1 1 1 0 1 1 1 1 0 1 1 0 0 1 0 0 1 1 0 0 0 0 0 1 1 1 0 1 1 0 0 1 1 0 0 1 1 1 1 0 0 1 0 1 0 0 0 0 1 0 0 1 0 1 1 0 1 1 0 0 1 0 1 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 1 0 1 1 0 0 1 0 0 1 0 1 0 0 0 0 1 1 1 0 1 Таблица 2.1 0 1 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 0 0 1 0 1 2 1 2 1 0 1 0 3 2 1 0 1 1 15 Рис. 2.2 Построение огибающей ФМ сигнала на выходе согласованного фильтра Схема, изображенная на рис.2.1 работает следующим образом. Генератор тактовых импульсов ГТИ вырабатывает тактовые импульсы с периодом Т0. Делитель частоты делит частоту тактового импульса до частоты повторения зондирующего сигнала. Формирователь управляющих импульсов длительностью МТ0 (ФУИ МТ0) синхронизируется сигналами с выхода делителя частоты (а также с блока синхронизации нестабильности линии задержки ЧПК) и формирует импульсы длительностью МТ0. Эти импульсы включают коммутатор, подключенный к генератору гармонического колебания. В зависимости от кода Мпоследовательности (0 или 1) на выходе коммутатора получаем гармоническое колебание со сдвигом фазы 0 или соответственно. Рассмотрим автокорреляционную функцию полученного сигнала, которая будет соответствовать комплексной огибающей на выходе согласованного фильтра. 30Т0 2Т0 Рис. 2.3 Результирующая огибающая сигнала на выходе согласованного фильтра Структурная схема фильтра согласованного с ФМ сигналом, описанным кодовой последовательностью M 000111101011001 m 0000 0 00 , изображена в приложении 2. 3. СТРУКТУРНАЯ СХЕМА РЛС Импульсные РЛС, осуществляющие когерентный прием и содержащие устройство ЧПК, называют РЛС с селекцией движущихся целей (РЛС с СДЦ). Основная цель использования РЛС с СДЦ является режекция сигналов пассивныхпомех от неподвижных целей (зданий, холмов, деревьев), и выделение сигналов отраженных от движущихся целей для их дальнейшего использования в обнаружителях и отображения радиолокационной обстановки на индикаторе. РЛС с СДЦ подразделяются на истинно-когерентные и псевдо-когерентные. В истинно-когерентных РЛС зондирующий сигнал представляет собой когерентную последовательность радиоимпульсов с одинаковой начальной фазой всех радиоимпульсов или с известной разностью начальных фаз радиоимпульсов отстоящих на Tп . В псевдо-когерентных РЛС зондирующий сигнал представляет собой некогерентную последовательность радиоимпульсов, но при обработке принятых сигналов случайность начальных фаз используется таким образом, что прием становится когерентным. Другими словами, как в истинно-когерентных РЛС, так и в псевдо- когерентных РЛС сигнал на выходе линейного тракта приемника, полученный при отражении зондирующего сигнала от неподвижной точечной цели, представляет собой импульсную когерентную пачку с одинаковыми начальными фазами радиоимпульсов, а при отражении от подвижной точечной цели, движущейся с ра2Vr ) начальные фазы радиоимпульсов в соседних периодах повторения отличается на 2fдц Tп . диальной скоростью Vrц ( fдц При анализе работы когерентно-импульсных РЛС обычно делается допущение, что в пределах главного "луча" диаграмма направленности постоянна, а вне главного "луча" излучение и прием не проводятся. Это допущение позволяет считать, что даже с учетом сканирования антенны амплитуды всех импульсов когерентной пачки, полученной при отражении зондирующего сигнала от точечной подвижной или неподвижной цели, одинаковы. Истинно-когерентные РЛС строятся на базе многокаскадного передатчика с усилителями мощности на выходе, а псевдо-когерентные РЛС - на базе высокочастотного генератора. Для проектируемой РЛС необходимо использовать сложный сигналы с B 1 , для этого, как правило, используются истинно-когерентные РЛС . На рис.3.1 приведена упрощенная структурная схема одного из вариантов истинно-когерентных РЛС. М УМ СМ 1 АП МГ ФФМС СМ 2 У СФ СГ КД ВУ ЧПК Рис. 3.1 Обобщенная структурная схема РЛС Развернутая структурная схема истинно-когерентной РЛС приведена в приложении 3. В данной РЛС с СДЦ в качестве передатчика используется усилитель мощности (УМ) с импульсной модуляцией, а опорный сигнал формируется с помощью стабильного генератора (СГ) гармонических колебаний на частоте fпр. Преимущество данной схемы состоит в том, что она позволяет применить активный способ формирования ФМС не только на несущей частоте, но и на более низких радиочастотах. Сигнал от стабильного генератора (СГ) в качестве опорного подается на когерентный детектор (КД). Он же поступает на формирователь ФМ сигнала (ФФМС) и далее, на смеситель (СМ1), куда одновременно подается сигнал от местного гетеродина (МГ), генерирующего гармоническое колебание на частоте fмг=f0-fпр. Колебания с выхода СМ1 на частоте f0 поступают на усилитель мощно- сти (УМ), в котором происходит усиление и импульсная модуляция гармонического ФМ колебания частотой f0. На выходе усилителя мощности получаются ФМ импульсы требуемой мощности и длительности, следующие с частотой fп. Эти импульсы через антенный переключатель (АП) поступают на антенну. В режиме приема сигналы с выхода АП поступают на смеситель (СМ2),куда одновременно подается колебание от МГ. Сигналы промежуточной частоты с выхода СМ2 поступают на усилитель радиочастоты (У), настроенный на промежуточную частоту, и далее на согласованный фильтр, затем на КД, куда подается опорный сигнал с выхода СГ. Сигналы с выхода КД поступают на устройство черезпериодной компенсации (ЧПК) заданной кратности. После преобразования в однополярные сигналы с выхода ЧПК подаются на накопитель пачки импульсов (БН) и затем на видеоусилитель (ВУ), а из него на устройства обнаружения и измерения координат цели. Для компенсации нестабильности линии задержки, используемой в ЧПК, необходима корректировка периода повторения излучаемых импульсов. Для этих целей служит блок синхронизации (БС), который, учитывая эту нестабильность, управляет формированием пачки зондирующих импульсов и блоком начальной установки (БНУ) через логическую схему (ЛС). Проведем выбор элементной базы к данной структурной схеме: В РЛС обнаружения с круговым обзором наибольшее распространение получили зеркальные антенны, состоящие из слабонаправленного излучастеля и зеркального отражателя. Отражатель выполняется в виде усеченного парабалоида, что позволяет получить диаграмму направленности вида косеканс квадрат. В качестве усилителя мощности используется лампа бегущей волны (ЛБВ) Приемник в РЛС строится по супергетеродинной схеме, которая позволяет получить более высокую чувствительность приемного тракта. Входным устройством приемника является полупроводниковый смеситель. Местный гетеродин вследствии высоких требований к стабильности частоты выполняется на базе стабильного задающего генератора. Согласованный фильтр для ФМ сигнала может быть реализован на основе ультразвуковых линий задержки (УЛЗ). Формирователь ФМС описан при расчете параметров ФМ сигнала. СПИСОК ЛИТЕРАТУРЫ 1. Методические указания к изучению темы «Принципы и физические основы построения радиолокационных и радионавигационных систем» по дисциплине «Основы теории радиотехнических систем» для студентов специальности 23.01 / Сост. М.Б.Свердлик. – Одесса: ОПИ, 1991. – 112 с. 2. Тексты лекций по дисциплине «Основы теории радиотехнических систем». Раздел «Обнаружение сигналов» для студентов специальности 23.01 / Сост. М.Б.Свердлик. – Одесса: ОПИ. 1992. – 87 с. 3. Методические указания по изучению темы «Статистическая оценка параметров и синтез измеретилей координат целей» для студентов специальности 23.01 / Сост. М.Б.Свердлик. – Одесса: ОПИ, 1990. – 53 с. 4. Тексты лекций по дисциплине «Основы теории радиотехнических систем». Раздел «Сложные сигналы» для студентов специальности 23.01 / Сост. М.Б.Свердлик. – Одесса: ОПУ. 1996. – 51 с. 5. Методические указания к курсовому проектированию по дисциплине «Основы теории радиотехнических систем» для студентов специальности 23.01 / Сост. М.Б.Свердлик, А.А.Кононов, В.Г.Макаренко. – Одесса: ОПИ, 1991. – 52 с. 6. Лезин Ю. С. «Введение в теорию и технику радиотехнических систем»: Учеб. пособие для вузов. –М.: Радио и связь, 1986. – 280 с., ил. 7. «Радиотехнические системы» / Под. ред. Ю.М.Казаринова. – М.: Высш. шк., 1990. Приложение 2 А Вход R ЛЗ Т0 C ЛЗ Т0 L ЛЗ Т0 0 ЛЗ Т0 0 ЛЗ Т0 ЛЗ Т0 ЛЗ Т0 0 ЛЗ Т0 ЛЗ Т0 ЛЗ Т0 0 ЛЗ Т0 ЛЗ Т0 ЛЗ Т0 ЛЗ Т0 0 ЛЗ Т0 0 0 ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп ЛЗ Тп В Выход Структурная схема согласованного фильтра для когерентной 12-импульсной пачки 15-позиционных ФМ сигналов. А – согласованный фильтр для одного импульса В – накопитель пачки импульсов Приложение 3 УМ СМ 1 Делитель частоты ГТИ Тр1 Тр2 ЛС Тр3 АП МГ ФУИ МТ0 Тр4 СМ 2 У Коммутатор СГ + СФ КД БНУ БС ЧПК БН ВУ Развернутая структурная схема РЛС Развернутая схема согласованного фильтра (СФ) и блока накопления (БН) приведена в приложении 2. Развернутую же схему ЧПК, благодаря любезности преподавателя, магистрантам можно не приводить.