Статья
Адаптивное подавление помех в сигналах электрокардиографии
Aifeng Ren 1, Zhenxing Du 1, Juan Li 1, Fangming Hu 1, Xiaodong Yang 1, * and Haider Abbas 2,3,4
1
2
3
4
*
School of Electronic Engineering, Xidian University, Xi’an 710071, Китай; afren@mail.xidian.edu.cn
(A.R.);ZhenxingDu@163.com (Z.D.); lijuan12388@163.com (J.L.); fangming95@163.com (F.H.)
King Saud University, Эр-Рияд 11653, Саудовская Аравия; hsiddiqui@ksu.edu.sa
National University of Sciences and Technology (NUST), Исламабад 44000, Пакистан
Department of Computer Sciences, Florida Institute of Technology (FIT), Мельбурн, FL 32901, США
Контакты: xdyang@xidian.edu.cn; Тел.: +86-29-8820-2830
Научные редакторы: Giancarlo Fortino, Hassan Ghasemzadeh, Wenfeng Li, Yin Zhang and Luca Benini
Получено: 11 March 2017; Принято: 15 April 2017; Опубликовано: 25 April 2017
Аннотация: как важный биологический сигнал, сигнал электрокардиограммы (ЭКГ)
является ценной основой для клинической диагностики и лечения ряда заболеваний.
Однако его настоящая значимость лежит в эффективном получении и правильном
распознавании сигналов ЭКГ. Фактически, на слабый сигнал порядка 0.1 мВ легко могут
повлиять различные помехи, вызванные магнитным полем или дыхательными движениями
пациента. Перекрывающиеся помехи влияют на качество электрокардиограммы, приводя к
неправильному обнаружению и распознаванию кардиоинтервалов, и таким образом,
вызывая ошибочный диагноз или неправильное лечение. Таким образом, устранение помех
сигнала ЭКГ и последующая технология идентификации кардиоинтервалов является
актуальной темой исследований, и их изучение имеет важное значение. Основываясь на
вышеизложенном, в этой статье представлены два улучшенных адаптивных алгоритма,
основанных на классическом алгоритме наименьших средних квадратов (LMS), путем
введения символьной функции и концепции блочной обработки.
Ключевые слова: сигнал ЭКГ; подавление помех; алгоритм наименьших средних квадратов
(LMS-алгоритм)
1. Введение
Как самый важный орган человеческого тела, сердце является источником энергии для
обмена веществ в различных органах и тканях. Основными единицами сердца являются
кардиомиоциты - мышечные клетки сердца, а сигнал электрокардиограммы (ЭКГ) человека
является их реакцией на электрическую стимуляцию [1]. При наличии определенного
способа стимулировать определенную интенсивность через клетки миокарда, образуются
внутриклеточные и внеклеточные потоки ионов, что приводит к потенциалу действия.
Сигналы ЭКГ полностью фиксируют этот процесс изменения [2], а форма волны ЭКГ
отражает физиологическое состояние различных частей сердца при медицинской
диагностике и является очень ценным справочным материалом для лечения [3].
Амплитуда сигнала ЭКГ очень слаба и находится в диапазоне от 10 мкВ до 4 мВ, поэтому
сигнал очень чувствителен к воздействию различных помех [4]. Одним из основных
источников помех являются частотные помехи 50 Гц, вызванные электромагнитным полем и
пациентом, дрейф базовой линии, вызванный движением конечностей и дыханием пациента,
и помехи электромиограммы (ЭМГ), вызванные стимуляцией скелетных мышц и их
сокращением [5].
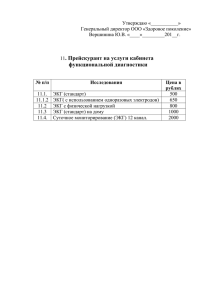
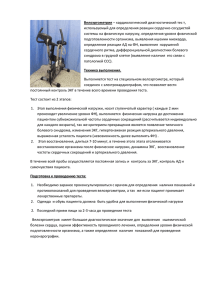
Частотные помехи [6] - наиболее частые помехи для сигналов ЭКГ - вызываются
магнитным полем, распространяемым источника питания, что приводит к добавлению
синусоидальных и гармонических составляющих 50 Гц в чистые сигналы ЭКГ [7]. На рисунке
1 показаны диаграммы во временной и частотной областях сигналов ЭКГ с
электромагнитными помехами (ЭМП).
Sensors 2017, 17, 942; doi:10.3390/s17050942
www.mdpi.com/journal/sensors
Sensors 2017, 17, 94
2 of 15
Рисунок 1. Сигнал ЭКГ с помехами от электромагнитного поля.
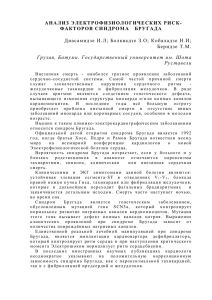
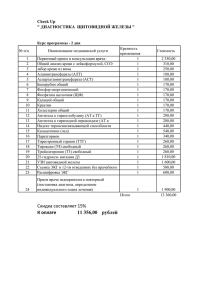
Дрейф базовой линии - это еще один вид помех, на который влияет дыхание пациента,
движение электродов и другие часто встречающиеся факторы [8]; его форма похожа на
периодический синусоидальный сигнал, обычно ниже низкочастотного сигнала с частотой 1
Гц, что приводит к нестабильному дрейфу базовой линии, заставляя кривую ЭКГ показывать
медленное изменение [9]. Временная и частотная области кривых ЭКГ, на которые влияет
дрейф базовой линии, показаны на рисунке 2.
Рисунок 2. Сигнал ЭКГ с дрейфом базовой линии.
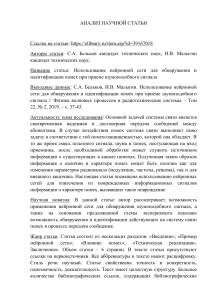
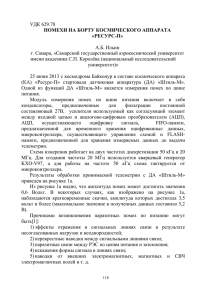
Когда сигнал ЭКГ получен с использованием различных режимов измерения, уровень
сигнала отличается. При реальном сканировании перед подмышкой сигнал ЭКГ является
наиболее ясным, поскольку он получается без помех, как показано на рисунке 3.
Sensors 2017, 17, 94
3 of 15
Рисунок 3. Сигнал ЭКГ без помех.
На основе классического алгоритма наименьших средних квадратов (LMS) [10], предлагаются
два улучшенных адаптивных алгоритма, а именно: нормированный алгоритм наименьших
средних квадратов (NLMS) [11] основанный на символьной функции, и нормированный
алгоритм наименьших средних квадратов обработки блоков (BLMS), основанный на
символьной функции. [12]. Символьные функции [13] и идея обработки блоков [14]
представлены и применяются для устранения двух видов помех: частотные помехи сигнала
ЭКГ и дрейф базовой линии. База данных ЭКГ MIT-BIH и реальные данные ЭКГ были
использованы для проверки алгоритма и детального анализа результатов.
2. Предлагаемый метод адаптивного подавления помех
2.1. Адаптивное подавление помех на основе алгоритма LMS
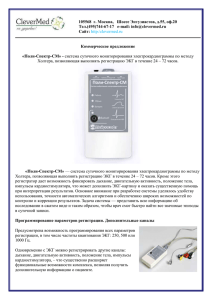
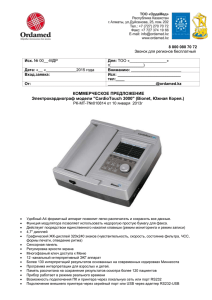
Основной принцип адаптивного подавления помех заключается в использовании
источника шума для вывода, затем для цифровой фильтрации [15] для наиболее точной
оценки шума, а затем для вычитания оцененного шума из исходного входного сигнала, таким
образом достигая разделения чистого полезного сигнала от шума. На рисунке 4 показана блоксхема адаптивного подавления помех на основе фильтрации Винера [16], в которой главным
входным сигналом является X(n), который состоит из полезного сигнала s(n) и сигнала
фоновых помех v0(n), которые не связаны друг с другом. Входной опорный сигнал v1(n)
должен быть входным сигналом, связанным с сигналом помех v0(n).
Рисунок 4. блок-схема адаптивного подавления помех.
Поскольку опорный сигнал v1(n) коррелирует с помехами v0(n) на главном входе,
фильтр удалит эту корреляцию на своем выходе. Это достигается за счет создания оценки
помех в сигнале на главном входе от шума на опорном канале и вычитания расчетного
значения помех из главного входа, чтобы на выходе получить оценку полезного сигнала.
Таким образом, конкретные шаги по реализации адаптивного шумоподавления на основе
LMS можно привести следующим образом:
Sensors 2017, 17, 94
4 of 15
1.
Начальное значение устанавливается по умолчанию для начала вектора весовых
коэффициентов.
2.
Вычисляется выходной сигнал адаптивного КИХ-фильтра (фильтр с конечной импульсной
характеристикой):
𝑣̂(𝑛) = ∑𝐿−1
𝑖=0 𝑊𝑖 𝑣1 (𝑛 − 𝑖),
3.
Оценивается ошибка текущего времени n:
𝑒(𝑛) = 𝑥(𝑛) − 𝑣̂(𝑛) ≈ 𝑠̂ (𝑛),
4.
(2)
Используется метод перевала алгоритма LMS для постоянной корректировки весового
вектора фильтра:
𝑊𝑖+1 (𝑛 + 1) = 𝑊𝑖 (𝑛) + 2𝜇𝑒(𝑛)𝑋(𝑛 − 𝑖) 0 ≤ 𝑖 ≤ 𝐿 − 1,
5.
(1)
(3)
Необходимо убедиться, что среднеквадратичное отклонение стандартной ошибки является
удовлетворительным. Если это так, нужно прекратить итерацию; в противном случае
перейдите к следующей операции.
2.2. Алгоритм NLMS, основанный на символьной функции
Алгоритм NLMS (нормированный алгоритм наименьших средних квадратов) — это своего
рода адаптивный алгоритм, который расширен и улучшен на основе алгоритма LMS.
Усовершенствование алгоритма заключается в использовании метода переменного шага,
таким образом сокращая время для полной сходимости, которая соответствует формуле
обновления весовых коэффициентов:
𝑊(𝑛 + 1) = 𝑊(𝑛) + [
𝜇
] 𝑒(𝑛)𝑋(𝑛),
𝑝+𝑋 𝑇 (𝑛)𝑋(𝑛)
(4)
Следовательно, переменный размер шага можно выразить как:
𝜇𝑒 (𝑛) =
𝜇
,
𝑝 + 𝑋 𝑇 (𝑛)𝑋(𝑛)
(5)
Здесь размер шага — это фиксированный коэффициент, который контролирует
скорость сходимости алгоритма. Параметр p не позволяет знаменателю быть слишком
маленьким. Когда параметр размера шага слишком велик, значение p обычно является
небольшим положительным числом [17].
Одним из основных недостатков алгоритма NLMS является то, что избыточная
среднеквадратичная ошибка слишком велика, чтобы вызвать искажение отфильтрованного
сигнала. Таким образом, был предложен алгоритм NLMS ошибок (ENLMS) с переменным
размером шага, пропорциональным квадрату сигнала ошибки в адаптивном алгоритме для
устранения частотных помех сигнала ЭКГ. Соответствующая формула итеративной
настройки алгоритма выглядит следующим образом:
𝜇
𝑊(𝑛 + 1) = 𝑊(𝑛) + [
] 𝑒(𝑛)𝑋(𝑛),
𝑇
𝑝 + 𝑒 (𝑛)𝑒(𝑛)
(6)
Следовательно, в алгоритме LMS переменный размер шага выражается следующим
образом:
𝜇𝑒 (𝑛) =
𝜇
,
𝑝 + 𝑒 𝑇 (𝑛)𝑒(𝑛)
(7)
Параметры µ и p имеют те же значения, что и выше. По сравнению с алгоритмом NLMS,
ENLMS при выборе длины шага больше не зависит от входного сигнала; таким образом,
ENLMS должна работать лучше.
Однако, согласно формуле переменного размера шага, алгоритм ENLMS требует
дополнительных вычислений для получения переменного размера шага по сравнению с
традиционным алгоритмом LMS. Следовательно, чтобы дополнительно уменьшить объем
вычислений, не влияя на качество отфильтрованного сигнала, в уравнение обновления
весовых коэффициентов (9) вводится знаковая функция.
Sensors 2017, 17, 94
5 of 15
Символьная функция sgn(x):
1∶𝑥>0
sgn(𝑛) = { 0 ∶ 𝑥 = 0 },
(8)
−1 ∶ 𝑥 < 0
Алгоритм NLMS, основанный на символьной функции получен. Таким образом,
окончательная формула итеративной корректировки весовых коэффициентов выглядит
следующим образом:
𝑊(𝑛 + 1) = 𝑊(𝑛) + 𝜇𝑒 (𝑛)sgn{𝑋(𝑛)}{𝑒(𝑛)},
(9)
2.3. Нормированный алгоритм BLMS, основанный на символьной функции
Из алгоритма NLMS, основанного на символьной функции, предложенного в предыдущем
разделе, концепция обработки блоков может быть введена для дальнейшего снижения
вычислительной сложности алгоритма.
Основная идея алгоритма BLMS [11] заключается в том, что, в отличие от основного
алгоритма LMS, коэффициенты фильтра пересчитываются и обновляются для каждого значения
выборки. Алгоритм обработки блоков реализован в каждой области блока, то есть каждый
элемент k указывает на обновление весового коэффициента [18]. Таким образом, формула
итеративной настройки вектора весовых коэффициентов фильтра для алгоритма обработки
блоков выглядит следующим образом:
𝑘−1
𝑊(𝑛 + 1) = 𝑊(𝑛) + 𝜇 ∑ 𝑋(𝑛𝑘 + 𝑖)𝑒(𝑛𝑘 + 𝑖),
(10)
𝑖=0
Тогда усредненный по времени вектор градиента равен:
𝑘−1
𝜙(𝑛) = 𝜇 ∑ 𝑋(𝑛𝑘 + 𝑖)𝑒(𝑛𝑘 + 𝑖) ,
(11)
𝑖=0
Вектор коэффициентов фильтра на основе алгоритма BLMS настраивается один раз на k
точек выборки, а обновление коэффициента основано на среднем векторе градиента k точек
выборки. Можно сделать вывод, что алгоритм BLMS также сходится к решению Винера, но
это не означает, что он достигнет окончательного результата раньше, чем LMS.
Обработка блоков вводится в алгоритм NLMS на основе символьной функции,
предложенной в предыдущем разделе, то есть входной сигнал обрабатывается в блоках (10), а
затем выбирается абсолютное значение сигнала ошибки в каждой области блока длиной L.
Значение используется для получения переменного размера шага. Таким образом, формула
обновления весовых коэффициентов принимает вид:
𝑊(𝑛 + 1) = 𝑊(𝑛) +
𝜇
2 sgn{𝑋(𝑛)}sgn{𝑒(𝑛)},
𝑒𝐿𝑖
(12)
Затем мы получаем формулу обновления весовых коэффициентов нормированного
алгоритма BLMS на основе символьной функции, которая более упрощённая, где 𝑒𝐿𝑖 =
max{|𝑒𝑘 |, 𝑘 ∈ 𝑍𝑖′ } , 𝑍𝑖′ = {𝑖𝐿, 𝑖𝐿 + 1, … , 𝑖𝐿 + 𝐿 − 1}, 𝑖 ∈ 𝑍, и если 𝑒𝐿𝑖 = 0, то уравнение (12) становится:
𝑊(𝑛 + 1) = 𝑊(𝑛).
(13)
3. Реализация
3.1. Адаптивное подавление помех для устранения частотных помех
Далее мы используем файлы общедоступной библиотеки MIT-BIH и данные, собранные
миниколлектором, для сравнения и проверки эффективности устранения помех сигнала ЭКГ.
Прежде всего, для чистого сигнала ЭКГ из библиотеки MIT-BIH, добавленная частотная помеха
в 50 Гц, добавит помехи после сигнала в качестве главного фильтра на входе, опорный вход и
выбор помех с косинусом той же частоты [14]. На рисунке 5 изображён чистый сигнал ЭКГ и
форма волны после нахождения частотных помех. На рисунке 6 показан спектр ЭКГ с частотными
помехами. Ясно видно, что присутствует сильный шум 50 Гц.
Sensors 2017, 17, 94
6 of 15
Рисунок 5. Сигнал ЭКГ до и после добавления частотных помех.
Рисунок 6. Спектр ЭКГ с частотными помехами 50 Гц.
На рисунке 7 показан результат адаптивного подавления помех. На рисунке 8
сходимость статистической среднеквадратичной ошибки трех алгоритмов адаптивного
подавления помех.
Рисунок 7. Результат трех алгоритмов адаптивного подавления помех.
Sensors 2017, 17, 94
7 of 15
Рисунок 8. Сходимость среднеквадратичной ошибки трёх алгоритмов.
На основе алгоритмов сбора данных ЭКГ в общедоступной библиотеке MIT-BIH данные
ЭКГ некоторого сотрудника обрабатывались с помощью сборщика мини-ЭКГ. На рисунке 9
показаны исходные графики ЭКГ и графики после добавления частотных помех. На рисунке
10 показан спектр.
Рисунок 9. До и после воздействия частотных помех на ЭКГ.
Рисунок 10. Влияние частотных помех на ЭКГ.
Sensors 2017, 17, 94
8 of 15
На рисунке 11 показан результат адаптивного подавления помех. На рисунке 12
показана кривая сходимости средней среднеквадратичной ошибки для 100 имитационных
моделей трех алгоритмов адаптивного подавления помех.
Рисунок 11. Результат трех алгоритмов адаптивного подавления помех.
Рисунок 12. Сходимость среднеквадратичной ошибки трех алгоритмов адаптивного подавления
помех.
3.2. Адаптивное подавление помех для удаления дрейфа базовой линии
Прежде всего, для чистой ЭКГ, взятой из общей библиотеки MIT-BIH, накладываются
помехи в виде дрейфа базовой линии, а затем смешанный сигнал используется в качестве
главного входа, а опорный вход используется как искусственный вход для помех дрейфа
базовой линии. Таким образом, корреляция между опорным входом и сигналом помех на
основном входе равна 1, и подавление помех является наиболее эффективным. На рисунке 13
показана чистая кривая ЭКГ и форма волны после добавления дрейфа базовой линии. На
рисунке 14 показан спектр формы сигнала после добавления дрейфа базовой линии. Видно,
что помехи дрейфа базовой линии в основном концентрируются в низкочастотной полосе
около нулевой частоты.
Sensors 2017, 17, 94
9 of 15
Рисунок 13. ЭКГ до и после добавления дрейфа базовой линии.
Рисунок 14. Спектр ЭКГ с дрейфом базовой линии.
На рисунке 15 показан результат адаптивного подавления помех. На рисунке 16 показана
кривая сходимости статистической среднеквадратичной ошибки трех алгоритмов адаптивного
подавления помех.
Sensors 2017, 17, 94
10 of 15
Рисунок 15. Выходной сигнал ЭКГ после адаптивного подавления помех.
Рисунок 16. Сходимость среднеквадратичной ошибки трёх алгоритмов адаптивного
подавления помех.
После проверки сигналов ЭКГ библиотеки MIT-BIH с помощью миниколлектора была
получена ЭКГ некоторого сотрудника для дальнейшей обработки. На рисунке 17 показан
полученный сигнала. На рисунке 18 показан его спектр.
Sensors 2017, 17, 94
11 of 15
Рисунок 17. ЭКГ до и после добавления дрейфа базовой линии.
Figure 18. Спектр ЭКГ с дрейфом базовой линии.
На рисунке 19 показан результат адаптивного подавления помех. На рисунке 20 показана
кривая сходимости статистической среднеквадратичной ошибки трех алгоритмов адаптивного
подавления помех.
Sensors 2017, 17, 94
12 of 15
Рисунок 19. Адаптивное подавление помех.
Рисунок 20. Сходимость среднеквадратичной ошибки трёх алгоритмов адаптивного подавления
помех.
4. Выводы и анализ
Базовый алгоритм LMS, алгоритм NLMS, основанный на символьной функции, и
нормированный алгоритм BLMS, основанный на символьной функции, показаны в таблице
1
для
сравнения
вычислительной
сложности
на
L
точек
выборки.
Sensors 2017, 17, 94
13 of 15
Таблица 1. Сравнение сложности трех видов адаптивных алгоритмов.
Алгоритм
Базовый алгоритм LMS
Алгоритм NLMS, основанный на
символьной функции
Нормированный алгоритм BLMS,
основанный на символьной функции
Время операции
умножение-сложение
L+1
Время деления
0
1
1
1
1
Как показано на таблицах 2 и 3, эти три алгоритма могут эффективно отфильтровывать
частотные помехи и получать чистую форму волны ЭКГ на выходе. Усовершенствованный
алгоритм NLMS и его алгоритм обработки блоков, основанный на символьной функции, по
сравнению с алгоритмом LMS получают более высокое значение отношения сигнал/шум
(SNR – signal-to-noise ratio).
Таблица 2. Изменения отношения сигнал/шум на ЭКГ MIT-BIH с частотными помехами до и после
шумоподавления.
Алгоритм
Базовый алгоритм LMS
Алгоритм NLMS, основанный
на символьной функции
Нормированный алгоритм
BLMS, основанный на
символьной функции
До фильтрации
SNR (дБ)
-13.5234
После фильтрации
SNR (дБ)
19.6638
-13.5234
23.3935
36.9168
-13.5234
23.4859
37.0093
SNRI (дБ)
33.1872
Таблица 3. Изменение отношения сигнал/шум до и после шумоподавления сигналов ЭКГ от
миниколлектора с частотными помехами.
Алгоритм
Базовый алгоритм LMS
Алгоритм NLMS, основанный
на символьной функции
Нормированный алгоритм
BLMS, основанный на
символьной функции
До фильтрации
SNR (дБ)
-12.600
После фильтрации
SNR (дБ)
7.4272
-12.600
10.973
23.572
-12.600
10.672
23.271
SNRI (дБ)
20.027
В таблице 4 показано изменение отношения сигнал/шум до и после подавления помех.
Можно видеть, что подавление помех тремя алгоритмами улучшает SNR на 12,5809, 15,8217 и
15,8337 дБ, соответственно, когда начальное SNR составляет -3,2003 дБ.
Таблица 4. Изменения отношения сигнал/шум сигналов ЭКГ MIT-BIH до и после фильтрации с дрейфом.
Алгоритм
Базовый алгоритм LMS
Алгоритм NLMS, основанный
на символьной функции
Нормированный алгоритм
BLMS, основанный на
символьной функции
До фильтрации
SNR (дБ)
-3.2003
После фильтрации
SNR (дБ)
9.3806
-3.2003
12.6214
15.8217
-3.2003
12.6334
15.8337
SNRI (дБ)
12.5809
В таблице 5 показано изменение отношения сигнал/шум до и после подавления помех.
Видно, что при сильном дрейфе базовой линии с начальным SNR, равным -2,7754 дБ, три
Sensors 2017, 17, 94
14 of 15
алгоритма адаптивного подавления помех увеличивают SNR сигнала на 13,9228, 16,6120 и
16,6158 дБ соответственно.
Таким образом, улучшенный алгоритм NLMS, основанный на символьной функции, и
его алгоритм обработки блоков улучшают SNR как для базы данных библиотеки MIT-BIH, так
и для анализа сигналов от мини-ЭКГ. Его сходимость достигается раньше, и устранение
помех сигнала шума лучше с изменением частоты.
Таблица 5. Изменения отношения сигнал/шум до и после шумоподавления сигналов ЭКГ от
миниколлектора с дрейфом базовой линии.
Алгоритм
Базовый алгоритм LMS
Алгоритм NLMS, основанный
на символьной функции
Нормированный алгоритм
BLMS, основанный на
символьной функции
До фильтрации
SNR (дБ)
-2.7754
После фильтрации
SNR (дБ)
11.1474
-2.7754
13.8366
16.6120
-2.7754
13.8404
16.6158
SNRI (дБ)
13.9228
Благодарности: Работа частично получила поддержку от National Natural Science Foundation of
China (No. 61671349), от the Project Funded by China Postdoctoral Science Foundation, и от the Postdoctoral
Research Projects Funded in Shaanxi Province. Авторы также хотели бы выразить свою искреннюю
признательность the Deanship of Scientific Research at King Saud University за финансирование этого
исследования в рамках the Research Group Project No. RG-1435-048.
Вклад авторов: Aifeng Ren, Zhenxing Du, Juan Li и Fangming Hu написали статью, Xiaodong Yang и
Haider Abbas предложили идею.
Конфликт интересов: Авторы объявили, что конфликтов интересов нет.
Источники
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
Sufi, F.; Qiang, F.; Khalil, I.; Mahmoud, S.S. Novel methods of faster cardiovascular diagnosis in wireless
telecardiology. IEEE J. Sel. Areas Commun. 2009, 27, 537–552. [CrossRef]
Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: Stateof-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [CrossRef]
Fortino, G.; Giannantonio, R.; Gravina, R.; Kuryloski, P.; Jafari, R. Enabling Effective Programming and
Flexible Management of Efficient Body Sensor Network Applications. IEEE Trans. Hum. Mach. Syst. 2013, 43,
115–133. [CrossRef]
Lin, Y.D.; Hu, Y.H. Power-line interference detection and suppression in ECG signal processing. IEEE Trans.
Biomed. Eng. 2008, 55, 354–357. [CrossRef] [PubMed]
Kiremire, B.; Marwala, T. Nonstationarity detection: The use of the cross correlation integral in ECG, and
EEG profile analysis. In Proceedings of the Congress on Image and Signal Processing (CISP’08), Sanya,
China, 27−30 May 2008; pp. 373–378.
Bhavani Sankar, A.; Kumar, D.; Seethalakshmi, K. Performance Study of Various Adaptive Filter Algorithms
for Noise Cancellation in Respiratory Signals. Signal Process. Int. J. 2010, 4, 267–278.
Covello, R.; Fortino, G.; Gravina, R.; Aguilar, A.; Breslin, J.G. Novel method and real-time system for
detecting the Cardiac Defense Response based on the ECG. In Proceedings of the 2013 IEEE International
Symposium on Medical Measurements and Applications (MeMeA), Gatineau, QC, Canada, 4–5 May 2013;
pp. 53–57.
Leski, J.M.; Henzel, N. ECG Baseline Wander Powerline Interface Reduction Using Nonlinear Filter Bank.
Signal Process. 2004, 35, 781–793.
Blanco-Velasco, M.; Weng, B.; Barner, K.E. ECG Signal Denoising and Baseline Wander Correction Based on
the Empirical Mode Decomposition. Comput. Biol. Med. 2008, 38, 1–13. [CrossRef] [PubMed]
Gravina, R.; Fortino, G. Automatic Methods for the Detection of Accelerative Cardiac Defense Response.
IEEE Trans. Affect. Comput. 2016, 7, 286–298. [CrossRef]
Singh, S.; Yadav, K.L. Performance evaluation of different adaptive filters for ECG signal processing. Int. J.
Comput. Sci. Eng. 2010, 40, 1880–1883.
Esposito, A.; D’Andria, P. An Adaptive Learning Algorithm for ECG Noise and Baseline Drift Removal.
In Italian Workshop on Neural Nets; Springer: Berlin/Heidelberg, Germany, 2003; pp. 139–147.
Sayadi, O.; Shamsollahi, M.B. ECG Denoising and Compression Using a Modified Extended Kalman Filter
Structure. IEEE Trans. Biomed. Eng. 2008, 55, 2240–2248. [CrossRef] [PubMed]
Kumar, N.; Ahmad, I.; Rai, P. Signal Processing of ECG Using Matlab. Int. J. Sci. Res. Publ. 2012, 12, 601–604.
Sensors 2017, 17, 94
16.
17.
18.
19.
15 of 15
Jagtap, S.K.; Chavan, M.S.; Wagvekar, R.C.; Uplane, M.D. Application of the digital filter for noise reduction
in electrocardiogram. J. Instrum. 2010, 40, 83–86.
Koike, S. Analysis of adaptive filters using normalized signed regressor LMS algorithm. IEEE Trans.
Signal Process. 1999, 47, 2710–2723. [CrossRef]
Eweda, E. Analysis and design of a signed regressor LMS algorithm for stationary and nonstationary
adaptive filtering with correlated Gaussian data. IEEE Trans. Circuits Syst. 1990, 37, 1367–1374. [CrossRef]
Rahman, M.Z.U.; Shaik, R.A.; Reddy, D.R.K. Efficient sign based normalized adaptive filtering techniques
for cancelation of artifacts in ECG signals: Application to wireless biotelemetry. Signal Process. 2011, 91,
225–239. [CrossRef]
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access
article distributed under the terms and conditions of the Creative Commons Attribution
(CC BY) license (http://creativecommons.org/licenses/by/4.0/).