Раздел 1 Механические явления
Глава 1 Кинематика
§1 Основные величины и определения.
1.
2.
3.
4.
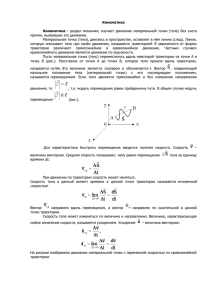
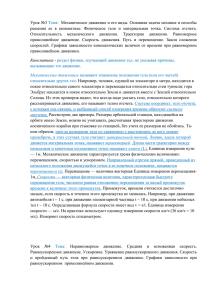
Механическое движение - перемещение тела относительно других тел.
Траектория – линия описываемая телом при его движении.
Путь – длина траектории (скалярная величина, для ее описания достаточно одного значения).
Перемещение – вектор, направленный от начала движения тела к его последующему
(конечному) положению (векторная величина для ее задания необходимо знать модуль и
направление или проекции на оси).
путь
В
траектория
А
S - перемещение
Рис.1
5. Скорость - векторная величина, характеризующая изменение перемещения по времени.
Различают:
а) мгновенная скорость определяет скорость в текущий момент времени. Для её нахождения
берут очень маленький промежуток времени Δt, вблизи рассматриваемого момента времени,
находится малое изменение перемещения ΔS за этот промежуток времени и тогда мгновенная
скорость определяется как:
б) средняя скорость за интервал времени от t1 до t2 определяется как:
где S(t2) – перемещение в момент времени t2, S(t1)- перемещение в момент времени t1.
6. Ускорение (a) - векторная величина, характеризующая изменение скорости по
времени.
Как и для скорости различают мгновенное и среднее ускорение, однако, так как в
школьном курсе не рассматриваются движения с переменным ускорением то в этом
случае достаточно рассматривать ускорение как:
где Δυ– изменение скорости за время Δt.
Для случая прямолинейного движения тела можно выбрать ось, направленную по
движения. В этом случае вместо векторных величин S,υ,a можно перейти к скалярным
величинам координате x, скорости υ и ускорению a вдоль этой оси.
§2 Типы движения
1. Равномерное – движение с постоянной скоростью.
Таким движение будет, если на тело не действуют силы (или силы скомпенсированы).
Это движение характеризуется следующим набором уравнений:
или в скалярной форме
Графики зависимости основных параметров от времени:
υ
a
t
t
x
x0 {
t
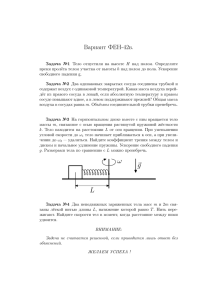
2. Равнопеременное движение – движение с постоянным ускорением.
Таким движение будет, если на тело действует постоянная сила.
Если ускорение больше нуля - движение равноускоренное, если ускорение меньше нуля –
движение равнозамедленное.
Это движение характеризуется следующим набором уравнений:
или в скалярной форме
Графики зависимости основных параметров от времени:
υ
a
υ0 {
t
t
x
υ0>0 υ0=0 υ0<0
a>0 - равноускоренное
x0 {
x0 {
υ=0
υ=0
t
a<0 - равнозамедленное
υ0<0 υ0=0 υ0>0
Характерной особенностью графика зависимости координаты (перемещения) от времени
является:
Уравнения определяются параболой, зависящей от начальной скорости и
ускорения. Причем вначале зависимость определяется начальной скоростью, а
затем ускорением (знак этих величин определяет, будет ли парабола уменьшаться
или возрастать).
В точках минимума и максимума параболы текущее значение скорости становится
равным нулю (тело останавливается).
Примером такого движения является полет тела, брошенного вертикально вверх с
начальной скоростью, в верхней точке траектории тело достигает максимальной высоты и
останавливается. В этом случае если ось направить вверх то начальная скорость больше
нуля (совпадает с направлением оси), а ускорение равное ускорению свободного падения
(g=9.8 м/с2 или примерно 10 м/с2) меньше нуля (направленно против выбранной оси).
§3 Закон сложения скоростей
Одним из основных понятий физики является понятие система отсчёта.
Система отсчета включает в себя:
1. Точка отсчета – определяет начало системы отсчета.
2. Связанную с точкой отсчета систему координат (чаще всего используется декартовая
система координат - x,y,z).
3. Прибор для измерения времени.
Часто надо решить задачу о переходе от одной системы отсчета к другой. В классической
механике для перехода от подвижной системы отсчета к покоящейся системе
используется преобразование Галилея.
Особый класс систем отсчета это инерциальные системы – такие системы отсчета,
которые либо покоятся, либо движутся с постоянной скоростью. Для таких систем
справедлив принцип относительности Галилея: во всех инерциальных системах отсчета
все механические процессы протекают одинаковым образом (законы имеют одинаковый
вид), вследствие чего никакими механическими опытами нельзя определить движется ли
система с постоянной скоростью или покоится.
Для инерциальных систем отсчета справедлив закон сложения скоростей:
или в скалярной форме
Скорость тела относительно неподвижной системы отсчета (υ) равна сумме скорости
тела относительно подвижной системы (υ’) и скорости самой подвижной системы
(υ0). Аналогичная формулировка для проекций скорости на декартовые оси.
Скорость тела в системе отсчета связанной с другим телом называется относительной
скоростью.
Примеры:
1) Два тела движутся навстречу друг другу вдоль одной прямой со скоростями υ1 и
-υ2. В этом случае если систему отсчета связать с одним телом (это будет
подвижная система со скоростью υ1) то относительная скорость второго тела
относительно первого (υ12) определяется как υ12 = (-υ2) - υ1, а по модулю υ12= υ1+
υ2.
2) Два тела движутся вдоль одной прямой в одном направлении со скоростями υ1 и υ2.
Относительная скорость в этом случае равна υ12 = υ2 - υ1.
3) Два тела движутся в разных направлениях со скоростями υ1 и υ2 как показано на
рисунке
y
υ1
α
β
υ2
x
Находим относительную скорость по оси x: υ12x= υ1x+ υ2x = υ1cos(α) + υ2cos(β),
находим относительную скорость по оси y: υ12y= υ1y - υ2y = υ1sin(α) - υ2sin(β). Модуль
относительной скорости определяется как
§4 Криволинейное движение
Для описания непрямолинейное движение тела требуется уже рассматривать поведение
нескольких проекции параметров на оси. В случае плоского движения (тело движется в
пределах одной плоскости) для описания этого движения достаточно двух проекций (на
ось OX и на ось OY).
Характерным примером такого движения является движение тела брошенного под
углом к горизонту (смотри рисунок). В этом случае за ось OX выбирается ось по
горизонтали плоскости движения, а за ось OY по вертикали этой плоскости.
y
υ0
α
Hmax
x
Для получения основных параметров такого движения рассмотрим отдельно тип
движения по оси OX и отдельно по оси OY. Вдоль горизонтали силы не действуют,
следовательно, по оси OX движение будет равномерное, а по вертикали действует сила
тяжести и все тела двигаются с ускорением равным ускорению свободного падения (g),
причем в данном случае это ускорение направленно против выбранной оси,
следовательно, по оси OY движение будет равнозамедленным. Таким образом, для каждой
оси требуется применить свой набор уравнений, описывающий требуемый тип движения.
Для ускорения:
Для скорости:
Для координат:
Знаки начальной скорости и ускорения в общем случае определяется выбором
направления системы координат. Если направление начальной скорости совпадает с
направлением выбранной оси, то она положительна, в противном случае начальная
скорость отрицательна. То же самое правило применимо и для ускорения. В нашем
примере начальная скорость положительна и по оси OX и по оси OY, а ускорение
отрицательное и направлено только по оси OY.
Дальность полета тела (L) – максимальное расстояние, которое пролетит тела вдоль
поверхности земли. Для рассматриваемого случая она определяется ка:
Так как время подъема (tпод) и время спуска (tсп) одинаковы (симметричные ветви из за
одинаковых условий подъема и спуска ) время полета (
) определяется как:
Время подъема можно определить исходя из того, что за это время тело подымается к
высшей точке траектории, в которой текущая проекция скорости на ось OY равна нулю.
Отсюда:
Отсюда максимальная дальность достигается при α =45о. Максимальную высоту подъема
для рассматриваемого случая можно определить как:
§4 Вращательное движение
Вращательное движение – это движение тела по окружности.
Основные величины (угловые):
1.
Угловое перемещение (φ) – векторная величина, модуль которой равен углу, на
который повернулось тело при вращении, а направление определяется, так же как и
направление угловой скорости (смотри далее).
2.
Угловая скорость (ω) – векторная величина характеризующая изменение углового
перемещения со временем.
Различают:
Мгновенная угловая скорость:
,
где Δφ – угловое перемещение
рассматриваемого момента времени.
за
малый
промежуток
времени
Δt
вблизи
Средняя угловая скорость:
,
φ(t1) – угловое перемещение за время t1, φ(t2) – угловое перемещение за время t2
Направление угловой скорости определяется по правилу правого буравчика (винта):
берется правый винт (правым винтом является любая ручка с резьбой) размещается
перпендикулярно плоскости вращения тела и вращается так же как вращается тело, куда
направлено движение самого винта туда и направлена угловая скорость (смотри рисунок).
ϕ
ω
Если разместить винт (ручку) перпендикулярно плоскости вращения тела (в данном
случае перпендикулярно плоскости рисунка) и вращать его так же как вращается тело (в
данном случае против часовой стрелки), винт начнет двигаться на нас (ручка
раскручивается), следовательно, на нас направлена и угловая скорость.
Принято для обозначения «на нас» и «от нас» применять правило стрелы, когда стрела
летит на нас, мы видим ее острие и обозначается это как кружок с точкой, а когда стрела
летит от нас, мы видим ее оперение и обозначается такое движение как кружок с
крестиком.
3.
Угловое ускорение (ε) – векторная величина характеризующая изменение угловой
скорости со временем.
4.
Центростремительное ускорение (aцс) – векторная величина характеризующая
изменение направления скорости. Она определяется по формуле:
где R – радиус окружности в данной точке.
Центростремительное ускорение направленно всегда к центу вращения, потому и
называется центростремительное т.е. стремящееся к центру.
Связь линейных и угловых величин:
1.
Связь линейной и угловой скорости:
,
где - линейная скорость тела, ω – угловая скорость тела, R – радиус вращения в данной
точке.
2.
Связь угловой скорости и периода (частоты):
где T – период, определяет время одного полного оборота, - частота (измеряется в
Гц=1/сек), определяет число полных оборотов за единицу времени.
Сложное движение тела:
Если движется не материальная точка (тело, размерами которого можно пренебречь в
данной задаче), а реальное тело, то может возникнуть сложное движение – когда тело
одновременно вращается вокруг некоторой оси и сама ось движется с некоторой
скоростью. В этом случае движение каждой точки тела описывается выражением:
,
где с – движение центра (оси) вращения тела, л – линейная скорость вращения любой
точки тела. Если тело катится по поверхности другого тела без проскальзывания, то с =
л. Линейную скорость можно определить по формуле связи линейной и угловой
скорости.
Пример:
Тело катится по поверхности стола как показано на рисунке, определить скорости точек
тела на ободе колеса.
л с
A
с
с
л
C
л
B
с
В точке А как видим из рисунка общая скорость точки =л + с = 2*с, в точке С =л с, = 0, а в точке В
.
Глава 2. Динамика
§1 Основные величины, определения и законы.
1. Основные величины и определения.
1.
Сила (F) – векторная величина характеризующая действие на данное тело другого
тела или поля.
2.
Масса (m):
Инерционная масса – скалярная величина определяющая инерцию тела. Инерция
– способность тела противодействовать изменению своей скорости.
Гравитационная масса – определяет гравитационное взаимодействие тел.
3.
Импульс тела (количество движения тела) (p) – векторная величина,
определяемая как произведение массы тела на его скорость (υ)
4.
Импульс силы (K) – векторная величина, определяемая как произведение силы на
время действия этой силы (Δt)
2. Основные законы (законы Ньютона).
1.
Первый закон Ньютона: Существуют такие системы отсчета, называемые
инерциальными, относительно которых тела сохраняют свою скорость постоянной, если
на них не действуют силы, либо действие всех сил скомпенсировано.
2.
Второй закон Ньютона:
Первая форма:
Ускорение (a), приобретаемое телом прямо пропорционально результирующей силе
(F) действующей на тело и обратно пропорционально массе (m) тела.
Вторая форма:
Изменение импульса тела (Δp) равно импульсу силы (K).
3.
Третий закон Ньютона: Тела действуют друг на друга с силами направленными
вдоль прямой соединяющей эти тела, эти силы равны по значению, противоположны по
направлению.
§2 Сила трения. Сила упругости.
Сила трения (сухого).
1.
Сила трения – сила, возникающая при движении одного тела по поверхности другого
тела, либо при попытке вызвать такое движение.
Сила трения покоя - сила, возникающая при попытке сдвинуть одно тело по
поверхности другого и направленная против касательной составляющей (вдоль
поверхности) внешней силы.
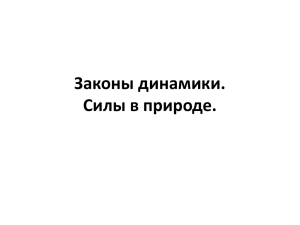
Максимальная сила трения покоя (приближенно равная силе трения движения) –
величина равная минимальной касательной силе, при которой начинается движение. Эта
сила подчиняется закону Амонтона:
где µ - коэффициент трения, N – сила нормального давления, равная силе реакции опоры.
График зависимости силы трения от величины касательной составляющей внешней силы
имеет вид:
Fтр
Fтрмах
F
Fтрмах
2. Сила упругости.
Сила упругости – сила, возникающая при деформации тела.
Деформация – изменение формы или размеров тела.
Сила упругости подчиняется закону Гука:
где k – коэффициент упругости (жесткости), x - координата конца деформированной
пружины, x0 – координата конца недеформированной пружины. Сила упругости
направлена против направления деформации.
x0
x
Fупр
§3 Гравитационная сила. Сила инерции.
1. Гравитационная сила.
Гравитационная сила – сила, возникающая между телами, обладающими массой.
В случае материальных точек (тела, размерами которых можно пренебречь в данных
условиях задачи) и для сферично симметричных тел (шар, сфера) гравитационная сила
подчиняется закону гравитационного взаимодействия (четвертый закон Ньютона):
где γ – гравитационная постоянная, m1 и m2 – массы взаимодействующих тел, r –
расстояние между телами для точечных тел или расстояние между центрами тел для
сферично симметричных тел. Гравитационная сила направленна вдоль прямой
соединяющей тела (центры тел) и направлена к притягивающему телу.
Наиболее простой пример гравитационной силы – это сила тяжести, т.е. сила притяжения
к Земле (планете), она определяется как:
где M – масса Земли (планеты), m – масса тела, r – расстояние от центра Земли (планеты)
до тела, R - радиус земли (планеты), h – высота над поверхностью Земли (смотрите
рисунок).
h
R
r
Под действием силы тяжести все тела начинают двигаться к Земле (планете) с
ускорением, которое называется ускорение свободного падения (g). Для произвольной
высоты это ускорение (g(h)) определяется по второму закону Ньютона как:
Если высота над поверхностью земли на много меньше радиуса Земли (Rз=6400 км.) то
ускорение свободного падения (g) определяется как:
Откуда можно определить массу Земли:
2. Сила инерции.
Сила инерции – сила, возникающая в неинерциальных системах отсчета, т.е. в системах,
движущихся с ускорением (это фиктивная сила, так как она не отражает реальное
взаимодействие, а введена для удобства описания движения тел в неинерциальной
системе).
При прямолинейном движении сила инерции определяется как:
где m – масса тела, ac – ускорение неинерциальной системы в которой движется тело.
Простейший пример проявление силы инерции мы можем наблюдать при езде в
автомобили, если автомобиль ускоряется нас, как бы, толкает назад, а если тормозит,
толкает вперед.
В случае если система вращается (например, при вращении тела с которым связывается
система) она тоже движется с ускорением (центростремительным) так как изменяется
направление скорости и сила инерции называется центробежная сила (Fцб), так как
направлена от центра вращения. Она определяется как:
где – линейная скорость вращения тела, R – радиус вращения (минимальное расстояние
от тела до оси вращения), - угловая скорость вращения тела.
3. Первая космическая скорость.
Первая космическая скорость – скорость, с которой тело должно вращаться вокруг
планеты, для того, что бы оставаться на стационарной орбите (то есть не улетать в космос
и не падать на планету).
При вращении тела вокруг планеты на тело действуют две силы – гравитационная сила и
центробежная сила (смотр рисунок).
h
Fцб
Fгр
R
r
В случае равенства этих сил и будет достигаться стационарность орбиты.
В случае если высота h много меньше радиуса земли Rз, то первая космическая скорость
определяется как:
Глава 3 Законы сохранения
§1 Основные величины и определения
1)
Работа (A):
,
где F – сила совершающая работу, S – перемещение тела, α – угол между Направлением
действия силы и перемещением.
2) Энергия – скалярная величина, характеризующая способность тела совершить работу.
1.
Кинетическая энергия (Eк) – скалярная величина, характеризующая
способность тела совершить работу за счет своего движения. Определяется
формулой:
где m – масса тела, - скорость тела.
2.
Потенциальная энергия (Eп) – скалярная величина характеризующая
способность тела совершить работу за счет взаимодействия с другими телами или
полем. Формула для этой величины зависит от силы образующей энергия
Для силы тяжести (вблизи поверхности Земли):
,
где m – масса тела, g – ускорение свободного падения, h – высота над поверхностью
земли.
Для силы упругости:
где k – коэффициент упругости (жесткости) пружины, x – смещение конца пружины
от положения равновесия (величина деформации пружины).
Для гравитационной силы притяжения к Земле (к планете) :
где Mз – масса Земли, m – масса тела, Rз - радиус Земли (планеты), h – высота над
поверхностью Земли, γ – гравитационная постоянная.
3) Мощность (N) – скалярная величина равная работе данной силы совершаемая за
единицу времени. Определяется формулой:
где A – работа, совершаемая данной силой F за время t, - скорость тела к которому
приложена данная сила, α – угол между направлением скорости и направлением действия
силы.
4) Коэффициент полезного действия (КПД) (η) определяется формулой:
где Апол – полезная работа, Nпол – полезная мощность, Азатр – затраченная работа, Nзатр –
затраченная мощность
§2 Закон сохранения импульса. Закон сохранения энергии.
1) Закон сохранения импульса
Закон сохранения импульса: Импульс замкнутой системы сохраняется.
или в скалярной форме
где N – число тел в замкнутой системе.
Замкнутая система – это система, в которой не действуют внешние силы.
Импульс может сохраняться и в открытой системе, если процесс взаимодействия очень
быстрый (взрыв, удар).
2) Закон сохранения энергии
Закон сохранения энергии: Изменение (обозначается как Δ) полной энергии системы (E)
равно работе неконсервативных (Aнк) и внешних сил (Aвн):
,
где E=Eк+Eп, где Eк кинетическая энергия всех тел системы, Eп – потенциальная энергия
всех тел системы. Если внешние или неконсервативные силы увеличивают энергию
системы, то их работа положительна, если уменьшают, то отрицательна.
Неконсервативные силы – силы, работа которых по замкнутому контуру не равна нулю
(сила трения, сила сопротивления, сила химической природы, возникающая, например,
при взрыве и т.д.).
Если внешние и неконсервативные силы отсутствуют, то закон сохранения энергия:
Полная энергия системы сохраняется и Eдо = Eпосле (полная энергия до взаимодействия
равна полной энергии системы после взаимодействия).
Глава 4 Механика жидкости и газа
§1 Основные определения и законы.
1.
Основные определения и величины
1)
Давление (p) – величина равная силе (F) действующей на единицу площади
поверхности расположенную перпендикулярно направлению действия силы.
где F – сила, действующая на поверхность,Sперп – площадь проекции поверхности на
плоскость, расположенную перпендикулярно направлению действия силы.
2)
Плотность (ρ) – масса единицы объема.
где m – масса тела (выбранного объема жидкости или газа), V – объем тела.
1)
2)
2.
Основные законы
Закон Паскаля: Давление в жидкости и газе во все стороны действует одинаково.
Основной закон гидростатики:
где p(h) – давление на глубине h, ρ – плотность жидкости, g – ускорение свободного
падения, pA – давление на поверхности жидкости (смотри рисунок)
pA
h
p(h)
3)
Закон Архимеда: на тела, погруженные в жидкость или газ, действует
выталкивающая сила (сила Архимеда), равная весу вытесненной жидкости.
где, FА – сила Архимеда, ρж – плотность жидкости, Vпогр – объем погруженной части тела.
Сила Архимеда обусловлена разностью давления жидкости над и под телом,
следовательно, если тело лежит на дне (под телом нет жидкости) то на это тело сила
Архимеда не действует.
Глава 5 Механические колебания и волны.
§1 Основные определения, величины и законы.
1.
Основные определения и величины
1)
Колебание – это периодический процесс, повторяющийся со временем.
2)
Гармонические колебания – колебание, изменяющееся по синусу или косинусу.
3)
Смещение (S) – текущее значение изменяющейся величины.
4)
Амплитуда (А) – максимальное отклонение изменяющейся величины от
положения равновесия.
5)
Период (Т) – время одного полного колебания (за которое величина вернется в
исходное состояние).
6)
Частота (ν) – число полных колебаний за единицу времени.
7)
Фаза (φ) – текущий момент колебания, выраженный в угловых единицах.
8)
9)
Начальная фаза (φ0) – фаза колебания в начальный момент времени.
Циклическая частота (ω) – угловая скорость изменения фазы.
Уравнение гармонических колебаний:
1.
2. Период колебания при некоторых процессах.
Период колебания математического маятника.
Математический маятник это материальная точка, прикрепленная к нерастяжимой,
невесомой нити (смотри рисунок).
Период колебания такого маятника определяется выражением:
где l – длина маятника, g – ускорение свободного падения.
2.
Период колебания пружинного маятника.
Пружинный маятник это материальная точка, прикрепленная к пружине (смотри рисунок)
Период колебания такого маятника определяется выражением:
где m – масса тела, k – коэффициент упругости (жесткости) пружины.
3. Упругие волны.
Волна – это процесс распространения колебания в пространстве.
Различают продольную волну – когда колебание частиц происходит параллельно
направлению распространения волны и поперечную волну – когда колебание частиц
перпендикулярно направлению распространения. Кроме этого бывает плоская волна –
когда фронт волны, т.е. геометрическое место точек до которых дошла волна, имеет вид
плоскости (от удаленного источника) и сферическая волна – когда фронт волны имеет
вид сферы (от точечного источника). Для описания волны вводится дополнительные
параметры:
1.
Фазовая скорость (vф) – скорость распространения фронта (фазы) волны.
2.
Длина волны (λ) – кратчайшее расстояние между точками волны, колеблющимися
в одинаковой фазе.
,
где Т – период колебаний волны.