Министерство Образования РФ
Санкт-Петербургский Государственный Электротехнический
Университет
"ЛЭТИ"
Кафедра АПУ
Синтез систем автоматической стабилизации механического
объекта
Пояснительная записка к курсовому проекту по дисциплине "Теория Управления"
Выполнил:
Волох К.А.
Петренко В.
ФКТИ
гр 1321.
Проверил:
Имаев Р.Д.
Санкт-Петербург 2004г.
Содержание.
Введение
3
1. Перевернутый маятник на каретке как объект управления
4
1.1 Описание объекта
4
1.2 Математические модели объекта управления.
4
1.2.1 Нелинейные дифференциальные уравнения
1.2.3 Линеаризованные дифференциальные уравнения
2. Анализ объекта управления
2.1 Компьютерная имитация объекта управления
2.2 Линеаризация компьютерной модели
2.3 Анализ устойчивости объекта управления
2.4 Анализ управляемости и наблюдаемости объекта управления
2.5 Передаточная функция объекта управления
3. Синтез регулятора
3.1 Синтез регулятора состояния
3.2 Метод размещения собственных значений
3.3 Синтез наблюдателя состояния
3.4 Динамический регулятор
3.5 Анализ системы стабилизации перевернутого маятника на каретке
3.5.1 Расчетный анализ
3.5.2 Компьютерная имитация замкнутой системы
4. Синтез дискретного регулятора
4.1 Способы синтеза
4.2 Дискретизация непрерывного регулятора
4.3 Синтез дискретного регулятора
4.4 Анализ замкнутой системы, образованной нелинейным непрерывным
объектом и линейным дискретным регулятором
Заключение
Литература
2
Введение
Предметом курсового проектирования является синтез алгоритмов управляющего
устройства, предназначенного для стабилизации механического объекта – перевернутого
маятника на подвижной каретке.
Целью курсового проектирования является освоение методов анализа, синтеза и
компьютерной имитации непрерывных и дискретных динамических систем управления
Для достижения цели проекта необходимо решить следующие задачи:
1 – составить нелинейную математическую модель объекта и верифицировать её путем
компьютерной имитации;
2 – провести анализ устойчивости, управляемости и наблюдаемости объекта;
3 – синтезировать регулятор состояния;
4 – синтезировать наблюдателя состояния и динамический регулятор;
5 – оценить область притяжения положения равновесия системы, образованной нелинейным
объектом и линейным регулятором;
6 – построить дискретный регулятор по непрерывному прототипу и провести анализ системы,
образованной непрерывным объектом и дискретным регулятором;
7 – синтезировать дискретный регулятор на базе дискретной модели объекта и провести
анализ замкнутой системы.
Синтез управляющих устройств осуществляется методом пространства состояний [1]
Анализ объекта и систем управления, а также компьютерная имитация выполняется с
помощью программы MatLab Simulink фирмы The Math Works. Inc [2]. Для оформления
пояснительной записки использовался текстовой редактор Microsoft® Word 2002. Рисунки
были выполнены с помощью программы Microsoft® Paint.
3
1. Перевернутый маятник на каретке как объект управления
1.1 Описание объекта
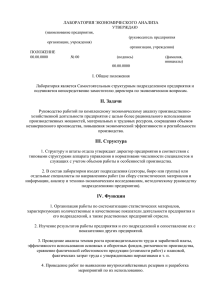
Θ
Рис 1.1
Принципиальная схема объекта управления.
На рис 1.1 представлен механический объект – маятник длины =1м с сосредоточенной
массой m=1кг, отклоненный от положения равновесия на угол Θ=1рад, на движущейся под
действием силы F каретке массой M=0.1кг, перемещенной от начала координат на x=1м.
=0.1рад/с, скорость каретки x =0.1м/с.
Угловая скорость маятника
Данная система имеет две степени свободы:
- поступательное движение каретки
- вращательное движение маятника
1.2 Математические модели объекты управления
Упущение: Если принять сосредоточенность масс; отсутствие трения и сопротивления
воздуха, то математическая модель объекта может быть представлена в форме системы
из двух дифференциальных уравнений:
g sin( ) x cos()
l
cos() ml
2 sin( ) f
(m M ) x ml
Первое уравнение отображает второй закон Ньютона для вращающихся масс
(g=9.81 м/с2);
Второе уравнение – торой закон Ньютона для поступательного движения.
Реализация моделей в среде программы MatLab Simulink упрощается, если уравнение
записывается в форме Коши:
- четыре уравнения первого порядка, разрешенного относительно производных.
Для этого исходное уравнение разрешаем относительно старших производных.
и x :
Можно заметить, что исходное уравнение линейно, относительно
Пусть будет матрица:
cos
g sin( )
l
ml cos m M ml
2
sin( ) f
x
Уравнения имеют единственное решение, если определитель системы не равен 0:
Δ=l(m+M)-ml*cos2(Θ) ≠0;
Уравнения, разрешенные относительно старших производных примут вид:
g sin( )
cos()
1
2
sin( ) f m M
ml
x
l
g sin( )
1
2 sin( ) f
ml cos() ml
4
1.2.1 Нелинейные дифференциальные уравнения
Уравнения в форме Коши запишутся так:
t
(( M m) g sin( ) ml
2 sin( ) cos() f cos()
t
x
x
t
2 sin( ) lf gml sin( ) cos())
x (ml 2
t
Уравнение дополняется начальными условиями.
1.2.2 Линеаризованные дифференциальные уравнение
Пусть просматриваются малые отклонения маятника от верхнего положения
равновесия. При этом sin(Θ)≈Θ.
Мы заменим при этой линеаризации.
Рассмотрим малое отклонение маятника и малые угловые скорости.
2 0
0
Линеаризованные уравнения примут вид sin( ) ; cos() 1;
Данный вариант задания конкретизирует параметры.
2. Анализ объекта управления
2.1 Компьютерная имитация объекта управления
Структурное представление моделей на языке графического редактора MatLab Simulink
изображено на рис 2.1. Реализуется на интеграторах.
t
x
t
x
x
Рис 2.1
Модель объекта на языке MatLab Simulink
Fcn :
1.1 * 9.81 * sin( u[1]) u[2] * u[2] * sin( u[1]) * cos(u[1]) u[3] * cos(u[1])
1.1 cos(u[1]) * cos(u[1])
Fcn1 :
u[2] * u[2] * sin( u[1]) u[3] 9.81 * sin( u[1]) * cos(u[1])
1.1 cos(u[1]) * cos(u[1])
5
Inital condition:
Integrator: 0.1
Integrator1: 1
Integrator2: 0.1
Integrator3: 1
2.2 Линеаризация компьютерной модели
Линеаризация моделей осуществляется автоматически по команде linmod2.
Матрицы задают модель в форме пространства состояний следующего вида:
A Bf
t
x C Df
Аналитически с учетом принятых допущений см.1.2.2
t
9.81( M m) * f
t
M
x
x
t
x f 9.81 * m
t
M
Следовательно,
0
1 0 0
0
9.81( M m)
1
0 0 0
M
,B M
0
0 0 1
0
9.81m
1
0 0 0
M
M
- вектор состояния; R4
Команда linmod2 выбирает компоненты вектора состояния, не обязательно совпадающие с
, x , x
физическими переменными ,
По структуре матриц A,B,C,D постараемся установить соответствие между
абстрактными и физическими переменными состояния
>>[A,B,C,D]=linmod2(‘kursovik’)
A=
0
0
0 1.0000
0
0 1.0000
0
0 107.9100
0
0
0 -98.1000
0
0
B=
0
0
-10.0000
10.0000
C=
1 0 0 0
D=
0
По виду матрицы С делаем заключение, что x=u1;D=0;По виду матриц A и B можно
;
заключить: x =u4;
t
Линеаризованное уравнение объекта в скалярной форме имеют вид:
6
1
t
2
t
3
t
4
t
4
3
107.91 * 2 10 f
98.1* 2 10 f
2.3 Анализ устойчивости объекта управления
Условием устойчивости линеаризованного объекта является отрицательность
действительных частей собственных значений матрицы A
>>eig(A)
ans =
0
0
10.3880
-10.3880
Наличие правого собственного значения свидетельствуют о том, что верхнее
положение маятника неустойчиво. Необходимо создание системы автоматического
регулирования, стабилизирующей это положение. Синтез системы связан с предварительным
анализом управляемости и наблюдаемости объекта.
2.4 Анализ управляемости и наблюдаемости объекта
Для анализа управляемости и наблюдаемости воспользуемся критерием Кальмана,
который сводится к проверке рангов матриц управляемости и наблюдаемости.
Матрица управляемости U=[B AB A2B A3B] заполняется с помощью команды
>>U=ctrb(A,B)
U=
1.0e+003 *
0 0.0100
0 0.9810
0 -0.0100
0 -1.0791
-0.0100
0 -1.0791
0
0.0100
0 0.9810
0
Проверим ранг матрицы управляемости:
>>rank(U)
ans =
4
Матрица имеет полный ранг, следовательно, объект по этому входу (воздействие на каретку )
управляем полностью.
Составим матрицу наблюдаемости по команде V=obsv(A,C)
C
CA
V
CA 2
3
CA
V=
1.0000
0
0
0
0
0
0 1.0000
0 -98.1000
0
0
0
0 -98.1000
0
Проверим ранг этой матрицы
>>rank(V)
ans =
4
Матрица наблюдаемости имеет полный ранг, следовательно, объект наблюдаем полностью по
этому выходу (положение каретки)
7
2.5 Передаточная функция объекта управления
Получим передаточную функцию исходно нелинейной модели объекта по следующей команде
>>[num,den]=ss2tf(A,B,C,D)
num =
0 0.0000 10.0000 -0.0000 -98.1000
den =
1.0000 -0.0000 -107.9100
0
0
Выведем передаточную функцию в s области.
>> printsys(num,den)
num/den =
1.4599e-014 s^3 + 10 s^2 - 2.6097e-014 s - 98.1
----------------------------------------------s^4 - 1.7764e-015 s^3 - 107.91 s^2
>> obiekt=tf(num,den)
Transfer function:
1.46e-014 s^3 + 10 s^2 - 2.61e-014 s - 98.1
------------------------------------------s^4 - 1.776e-015 s^3 - 107.9 s^
Обратим внимание на то, что получились другие матрицы в Форме Пространства Состояний,
это является следствием того, что преобразование от ПФ к ФПС не является однозначным.
Вычислим нули и полюса передаточной функции объекта.
>>zpk(obiekt)
Zero/pole/gain:
1.4599e-014 (s+6.85e014) (s-3.132) (s+3.132)
-------------------------------------------s^2 (s-10.39) (s+10.39)
эта команда представляет ПФ в так называемой факторизованной форме. Заметим, что нет
одинаковых нулей и полюсов ПФ. Это является необходимым и достаточным условием
полной управляемости и наблюдаемости одномерного объекта.
>>zpplot(obiekt)
There are no zeros and poles.
3 Синтез регулятора
3.1 Синтез регулятора состояний
f Kυ (k 1k 2 k 3 k 4 )υ (k 1 υ1 k 2 υ2 k 3 υ3 k 4 υ4 )
Представляет собой отрицательную обратную связь по отношению к объекту.
υ
Aυ Bf
t
Уравнение системы получим, исключив из него управляющее воздействие f.
υ
υ
Aυ BKυ или
( A BK ) υ
t
t
Матрица замкнутой системы A-BК должна иметь желаемые собственные значения в левой
полу-плоскости.
3.2 Метод размещения собственных значений
Коэффициенты регулятора упорядоченные в матрицу – строку K выбираются таким образом,
чтобы матрица замкнутой системы А-ВК имела заданные собственные значения. Выберем
следующие желаемые значения:
p=[-1 -2 -3 -4]`
Коэффициенты регулятора состояния вычисляются по команде:
>>K=place(A,B,p)
K=
-0.2446 -14.5356 -1.5097 -0.5097
Проанализируем, чему равны собственные значения матрицы замкнутой системы.
>>eig(A-B*K)
8
ans =
-4.0000
-3.0000
-2.0000
-1.0000
3.3 Синтез наблюдателя состояний
Регулятор состояния предполагает, что измеряются или оцениваются (вычисляются все
переменные состояния). Однако, в случае нашего объекта непосредственно измеряется только
переменная x - (положение каретки). Необходимо синтезировать наблюдателя состояния,
позволяющего вычислять недостающие переменные состояния.
Задача синтеза наблюдателя оказывается дуальной (двойственной) по отношению к
задаче синтеза регулятора состояния.
Назначим желаемые собственные значения матрицы наблюдателя таким образом,
чтобы процессы в нем происходили значительно быстрее, чем в основном контуре.
>> po=[-10 -20 -30 -40]'
po =
-10
-20
-30
-40
Чем дальше от границы устойчивости, тем быстрее затухают процессы. Матрица обратной
связи наблюдателя вычисляется по команде:
>> L=place(A',C',po)
L=
1.0e+003 *
0.1000
-0.6197
-6.4152
3.6079
3.4 Динамический регулятор
Динамический регулятор представляет собой объединение регулятора состояния и
наблюдателя. Матрица динамического регулятора вычисляется по команде:
>> [Ar,Br,Cr,Dr]=reg(A,B,C,D,K,L)
Ar =
1.0e+003 *
-0.1000
0
0 0.0010
0.6197
0 0.0010
0
6.4127 -0.0374 -0.0151 -0.0051
-3.6055 0.0473 0.0151 0.0051
Br =
1.0e+003 *
0.1000
-0.6197
-6.4152
3.6079
Cr =
-0.2446 -14.5356 -1.5097 -0.5097
Dr =
0
Вычислим передаточную функцию:
>> [numr,denr]=ss2tf(Ar,Br,Cr,Dr)
numr =
1.0e+005 *
0
0.1683
1.6233 -1.3456 -0.5872
9
denr =
1.0e+005 *
0.0000 0.0011 0.0464 -0.6787 -2.5481
>> regulator=tf(numr,denr)
Transfer function:
1.683e004 s^3 + 1.623e005 s^2 - 1.346e005 s - 5.872e004
------------------------------------------------------s^4 + 110 s^3 + 4643 s^2 - 6.787e004 s - 2.548e005
Структура замкнутой системы показана на рис 3.1
Рис 3.1
Структура замкнутой системы
3.5 Анализ системы стабилизации перевернутого маятника на каретке
3.5.1 Расчетный анализ
В результате синтеза динамического регулятора получим замкнутую линейную систему,
структурная схема которой изображена на рисунке 3.1
Вычислим матрицы уравнений замкнутой системы.
>> system=feedback(obiekt,regulator)
Transfer function:
1.46e-014 s^7 + 10 s^6 + 1100 s^5 + 4.633e004 s^4 - 6.895e005 s^3 - 3.004e006 s^2 + 6.658e006 s + 2.5e007
-------------------------------------------------------------------------------------------------------------------------------------------s^8 + 110 s^7 + 4535 s^6 + 8.855e004 s^5 + 8.675e005 s^4 + 4.327e006 s^3 + 1.098e007 s^2 + 1.32e007 s + 5.76e006
Вычислим собственные значения матрицы системы:
>> [Ac,Bc,Cc,Dc]=ssdata(system)
Ac =
-110.0000 -17.7148 -1.3512 -0.2068 -0.0322 -0.0051 -0.0008 -0.0002
256.0000
0
0
0
0
0
0
0
0 256.0000
0
0
0
0
0
0
0
0 64.0000
0
0
0
0
0
0
0
0 32.0000
0
0
0
0
0
0
0
0 16.0000
0
0
0
0
0
0
0
0 8.0000
0
0
0
0
0
0
0
0 2.0000
0
Bc =
0.2500
0
0
0
0
0
0
0
Cc =
0.0000 0.1563 0.0671 0.0442 -0.0205 -0.0056 0.0016 0.0029
Dc =
0
>> eig(Ac)
ans =
-40.0000
-30.0000
-20.0000
-10.0000
10
-4.0000
-3.0000
-2.0000
-1.0000
Вывод: замкнутая система имеет желаемые собственные значения.
3.5.2 Компьютерная имитация замкнутой системы
Подключаем линейный динамический регулятор к нелинейному объекту, как это покозано на
рис 3.2
Рис 3.2
Структурная схема замкнутой системы
Целью имитационных исследований является оценка размеров области притяжения
стабилизируемого положения равновесия.(При каких начальных отклонениях каретки маятник
у нас вернется в состояние покоя.)
Прежде всего убедимся в том, что положение равновесия устойчиво в малом. Для этого
подвергнем линеаризации замкнутую систему.
Рис 3.2
Принципиальная схема замкнутой модели системы
>> [Ac1,Bc1,Cc1,Dc1]=linmod2('kurs')
Ac1 =
1.0e+003 *
0
0
0
0
0
0
0 0.0010
0
0 0.0010
0
0
0
0
0
0 0.1079
0 -1.3148 -0.0991 0.0026 0.0001
-0.1280
0
0 -0.1100 -0.0363 0.0166 0.0078
0
0
0 0.1280
0
0
0
0
0
0
0
0 0.0320
0
0
0
0
0
11
0
0
0
0
0 0.0080
0
0
0 -0.0981
0 1.3148 0.0991 -0.0026 -0.0001
Bc1 =
0
0
0
128
0
0
0
0
Cc1 =
1 0 0 0 0 0 0 0
Dc1 =
0
0
Проверим устойчивость, т.е вычислим собственные значения.
>> eig(Ac1)
ans =
-40.0000
-30.0000
-20.0000
-10.0000
-4.0000
-3.0000
-2.0000
-1.0000
Линеаризованная система устойчива, имеет желаемые собственные знпчения, что
свидетельствует о существовании области устойчивости в малом (малой области
устойчивости). Для оценки области притяжения проведем серию имитационных
исследований, назначая различные начальные условия 0 , x 0 ;
Получены следующие значения:
x0 max 0.055 м ;
0 max 0.056 рад ;
4. Синтез дискретного регулятора
4.1 Способы синтеза
Можно выделить два способа синтеза дискретного регулятора, стабилизирующего
непрерывный объект:
12
1 – дискретизация непрерывного регулятора;
2 – синтез дискретного регулятора на базе дискретной модели объекта;
На рис 4.1 иллюстрируются оба способа.
Рис 4.1
Способы синтеза дискретного регулятора
примечание: Имитация возможна только при существовании области устойчивости
дискретной системы.
4.2 Дискретизация непрерывного регулятора
Основным вопросом при дискретизации непрерывного регулятора является выбор периода
дискретизации Т . Имеются противоречивые требования – слишком малые значения Т
усложняют техническую реализацию, а слишком большие – приводят к недопустимой потере
информации, в результате чего замкнутая система может стать неустойчивой.
Период дискретизации Т выбирается «экспериментально», для выбора начального
приближения можно воспользоваться теоремой Котельникова – Шеннона, которая
утверждает, что частота дискретизации должна быть более чем в два раза выше максимальной
частоты в спектре сигнала.
Спектр сигналов (распределение энергии по частотам) циркулирующих в контуре
регулирования и в контуре наблюдающего устройства, определяются собственными
значениями, которые были назначены при синтезе.
Положим, что максимальная частота в спектре сигналов в пять раз выше максимального
модуля собственных значений (р)
wmax=5|pi|;
В нашем случае |pi| = 40 c-1;
13
Значит, wmax = 5*40 = 200 c-1;
Приближенное значение периода дискретизации находится так: wT>2 wmax ; wT>400c-1
2
wT =
>400c-1 ; T<0.0157; Т≈0.015;
Проведем дискретизацию полученного ранее непрерывного регулятора по команде:
>>[Ard,Brd,Crd,Drd]=c2dm(Ar,Br,Cr,Dr,0.015)
Ard =
0.1023 0.0031 0.0010 0.0072
4.6869 1.0075 0.0170 0.0454
37.6796 -0.4188 0.8203 0.3412
-17.8233 0.6164 0.1969 0.8588
Brd =
0.8979
-4.6866
-37.7082
17.8544
Crd =
-0.2446 -14.5356 -1.5097 -0.5097
Drd =
0
Проведем расчетный анализ системы с дискретным регулятором. Расчетные методы имеются
только для однородных объектов, поэтому подвергнем дискретизации и объект:
>> [Ad,Bd,Cd,Dd]=c2dm(A,B,C,D,0.015)
Ad =
1.0000 -0.0111 -0.0001 0.0150
0 1.0122 0.0151
0
0 1.6252 1.0122
0
0 -1.4775 -0.0111 1.0000
Bd =
0.0011
-0.0011
-0.1506
0.1506
Cd =
1 0 0 0
Dd =
0
Рис 4.2
Структурная схема дискретной модели замкнутой системы
Получим матрицы замкнутой системы:
>> [Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd)
Acd =
1.0000 -0.0111 -0.0001 0.0150 0.0003 0.0164 0.0017 0.0006
0 1.0122 0.0151
0 -0.0003 -0.0164 -0.0017 -0.0006
0 1.6252 1.0122
0 -0.0368 -2.1892 -0.2274 -0.0768
0 -1.4775 -0.0111 1.0000 0.0368 2.1884 0.2273 0.0767
0.8979
0
0
0 0.1023 0.0031 0.0010 0.0072
-4.6866
0
0
0 4.6869 1.0075 0.0170 0.0454
-37.7082
0
0
0 37.6796 -0.4188 0.8203 0.3412
17.8544
0
0
0 -17.8233 0.6164 0.1969 0.8588
Bcd =
14
0.0011
-0.0011
-0.1506
0.1506
0
0
0
0
Ccd =
1 0 0 0 0
Dcd =
0
>>eig(Acd)
ans =
0.1047
1.0174 + 0.3118i
1.0174 - 0.3118i
0.7603
0.9540
0.9618
0.9987 + 0.0134i
0.9987 - 0.0134i
>>abs(eig(Acd))
ans =
0.1047
1.0641
1.0641
0.7603
0.9540
0.9618
0.9988
0.9988
0
0
0
Причиной неустойчивости замкнутой дискретной системы может быть слишком большой
период времени дискретизации. Чтобы проверить это предположение, повторим
дискретизацию и анализ изменяя значения Т;
Вывод: Замкнутая линейная система при Т≈0.01 является устойчивой, что свидетельствует о
существовании области притяжения положения равновесия.
Проведем имитационное исследование гибридной системы образованной нелинейным
непрерывным объектом и линейным дискретным регулятором для оценки размеров области
притяжения.
x0 max 0.021м ;
0 max 0.05 рад ;
При уменьшении Т до 0.0001с не существует области устойчивости.
15
Рис 4.3
Принципиальная схема дискретной модели замкнутой системы
Рис 4.4
График переходных процессов замкнутой системы,
дискретизированой по времени Т=0.01 с
4.3 Синтез дискретного регулятора
Проведем синтез дискретного регулятора по дискретной модели объекта, полученной для
периода дискретизации Т=0.01с
>> abs(eig(Ad))
16
ans =
1.0000
1.0000
1.1095
0.9013
Положение равновесия объекта – неустойчивое. Для стабилизации объекта необходимо
синтезировать регулятор.
Методика синтеза дискретного регулятора такая же, что и непрерывного, выбором метода
размещения желаемых корней, основным вопросом является назначение желаемых
собственных значений.
Два способа:
первый способ – дастстремление к аналогии с непрерывной системой; второй – назначение
нулевых собственных значений для получения процессов с конечным временем затухания.
Прежде всего следует убедиться в управляемости объекта, для чего воспользуемся критерием
Калмана.
Алгоритмическая основа анализа управляемости и наблюдаемости дискретных объектов
совпадает с непрерывным случаем:
>> Ud=ctrb(Ad,Bd)
Ud =
0.0011 0.0034
-0.0011 -0.0034
-0.1506 -0.1543
0.1506 0.1539
>> rank(Ud)
ans =
4
0.0058
-0.0058
-0.1617
0.1606
0.0082
-0.0083
-0.1730
0.1709
Ранг матрицы управляемости – полный , следовательно, дискретный объект полностью
управлем, значит, имеет решение задача синтеза регулятора состояния, обеспечивающего
перемещение собственных значений в назначенные места.
Для получения процессов, затухающих не более, чем за 4 такта назначим желаемые
собственные значения нулевыми
>> z=[0 0 0 0]'
z=
0
0
0
0
Команда place MatLab не позволяет решать задачу для случая, где кратность желаемых корней
превышает ранг матрицы Bd
>> rank(Bd)
ans =
1
Вычислим матрицу регулятора состояний.
>> Kd=acker(Ad,Bd,z)
Kd =
1.0e+005 *
-2.0095 -2.0225 -0.0755 -0.0754
Проведем анализ дискретной системы
>> eig(Ad-Bd*Kd)
ans =
-0.0039
0.0000 + 0.0039i
17
0.0000 - 0.0039i
0.0039
>> abs(eig(Ad-Bd*Kd))
ans =
0.0039
0.0039
0.0039
0.0039
Поскольку не удается измерить все переменные состояния (приходится измерять все
переменные состояния) измеряется только в положении x, то мы вынуждены синтезировать
наблюдателя состояния.
Известно, что эта задача имеет решение, если объект наблюдаем полностью.
>> Vd=obsv(Ad,Cd)
Vd =
1.0000
0
0
0
1.0000 -0.0111 -0.0001 0.0150
1.0000 -0.0445 -0.0004 0.0300
1.0000 -0.1011 -0.0015 0.0450
>> rank(Vd)
ans =
4
Следовательно, существует задача синтеза наблюдателя. Для синтеза наблюдателя выберем
метод размещения собственных значений. Чтобы получить наблюдатель, процессы в котором
затухают не более, чем за 4 такта, назначим следующие желаемые собственные значения:
>> zo=[0 0 0 0]'
zo =
0
0
0
0
>> Ld=acker(Ad',Cd',zo)'
Ld =
1.0e+003 *
0.0040
-0.1401
-3.3361
0.2926
Вычислим матрицы динамического регулятора по команде:
>> [Ard,Brd,Crd,Drd]=dreg(Ad,Bd,Cd,Dd,Kd,Ld)
Ard =
1.0e+006 *
0.0571 0.0002
-0.0570 -0.0002
-7.6326 -0.0305
7.6329 0.0304
Brd =
1.0e+006 *
0.0000
-0.0000
-0.0011
0.0011
0.0000
-0.0000
-0.0011
0.0011
-0.0569
0.0567
7.6023
-7.6026
Crd =
1.0e+007 *
-5.0703 -0.0202 -0.0008 -0.0008
18
Drd =
5.0502e+007
4.4 Анализ замкнутой системы, образованной нелинейным непрерывным объектом
и линейным дискретным регулятором
Получим матрицы замкнутой линейной системы, образованной дискретным объектом и
дискретным динамическим регулятором.
>> [Acd,Bcd,Ccd,Dcd]=feedback(Ad,Bd,Cd,Dd,Ard,Brd,Crd,Drd)
Acd =
1.0e+006 *
-0.0569
0.0569
7.6060
-7.6032
-0.0569
0.0567
7.6023
-7.6026
Bcd =
0.0011
-0.0011
-0.1506
0.1506
0
0
0
0
Ccd =
1 0
Dcd =
0
-0.0000
0.0000
0.0000
-0.0000
0
0
0
0
-0.0000
0.0000
0.0000
-0.0000
0
0
0
0
0
0
0
0
0
0
0
0
0
0.0000 0.0571 0.0002 0.0000 0.0000
0 -0.0572 -0.0002 -0.0000 -0.0000
0 -7.6362 -0.0305 -0.0011 -0.0011
0.0000 7.6334 0.0304 0.0011 0.0011
0.0571 0.0002 0.0000 0.0000
-0.0570 -0.0002 -0.0000 -0.0000
-7.6326 -0.0305 -0.0011 -0.0011
7.6329 0.0304 0.0011 0.0011
0
Вычислим собственные значения дискретной системы
>> eig(Acd)
ans =
-8.0681
0.6708 + 0.4127i
0.6708 - 0.4127i
0.6043
0.0214
-0.0109 + 0.0178i
-0.0109 - 0.0178i
0.0004
Замкнутая система оказалась неустойчивой – есть две возможности создать устойчивую
систему:
1 – изменить период дискретизации Т
2 – назначить другие желаемые собственные значения.
Попробуем реализовать 1-ю возможность, выберем Т=0.005
>> eig(Acd)
ans =
-7.9537
-0.2951
0.0258 + 0.4305i
0.0258 - 0.4305i
0.7524 + 0.4189i
0.7524 - 0.4189i
-0.0000
19
0.6790
>> abs(eig(Acd))
ans =
7.9537
0.2951
0.4313
0.4313
0.8611
0.8611
0.0000
0.6790
Не удалось получить замкнутую дискретную систему, процессы в которой затухали бы не
более чем за 8 тактов. Попробуем реализовать другой способ.
Назначим собственные желаемые значения при синтезе регулятора. Желаемые собственные
значения выбираем из условия , когда процессы в дискретной системе близки к процессам
соответствующей непрерывной системы.
Вывод: Выбором различных значений времени дискретизации Т=0.01, 0.015, 0.005 не удалось
получить замкнутую линейную дискретную систему, процессы в которой затухают не более
чем за 8 тактов.
20
Заключение
В результате курсового проектирования построенные нелинейные и линейные
математические модели объекта управления. На базе линейной непрерывной модели объекта с
помощью метода размещения собственных значений синтезирован регулятор состояния со
следующей матрицы:
K =[ -0.2446 -14.5356 -1.5097 -0.5097 ]
Проведен синтез наблюдателя состояния и получен динамический регулятор с
передаточной характеристикой:
1.683e004 s^3 + 1.623e005 s^2 - 1.346e005 s - 5.872e004
---------------------------------------------------------------------s^4 + 110 s^3 + 4643 s^2 - 6.787e004 s - 2.548e005
Такой регулятор обеспечивает устойчивость перевернутого маятника на каретке при
начальных условиях, не превышающих следующих значений:
x0 max 0.055 м ; начальное смещение каретки от начала координат,
0 max 0.056 рад ; начальное отклонение маятника,
Синтез дискретного регулятора проведен для периода дискретности времени Т=0.01с.
При этом дискретная передаточная функция регулятора имеет вид:
100.4 z^3 - 291.2 z^2 + 281.2 z - 90.38
-----------------------------------------------------z^4 - 3.086 z^3 + 3.463 z^2 - 1.712 z + 0.3329
В силу вычислительных погрешностей не удалось выбрать период дискретности
времени, при котором система была бы устойчива.
Дискретизация непрерывного регулятора на базе дискретной модели объекта,
полученный для периода дискретности Т=0.015с , даёт следующую передаточную функцию
динамического регулятора:
5.731e008 z^4 - 1.62e009 z^3 - 1.397e010 z^2 + 9.865e009 z - 1.51e009
----------------------------------------------------------------------------------------z^4 - 2.868e005 z^3 - 5.253e004 z^2 + 2.343e005 z + 5.023e-008
Этот регулятор обеспечивает следующие параметры области притяжения положения
равновесия:
x0 max 0.021м ;
0 max 0.05 рад ;
Задачи, поставленные перед курсовым проектом решены полностью.
21
Литература
1
2
3
Алексеев А.А.,Имаев Р.Д., и др. «Теория управления» СПбГЭТУ «ЛЭТИ», 2000г.
MatLab Users Quide; The MathWorks Inc. Natich MA 1997.
Беленький Ю.М., Власенко С.Ю. Microsoft Word 2000 СПб «БХВ-Петербург»
22