! 0006самонастр PID 361, ! 0007 1568982264, ! 0008sommer, ! 0009гиперкомпл врем рядовIMECS2017 pp213-217, ! 0010information-03-00756
реклама

Выполнил: Раздельщиков К.С.
Группа: КП-501
Факультет: МТ
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
1. Кватернионная нейронная сеть
Кватернион образует класс гиперкомплексных чисел, состоящий из действительного числа и трех мнимых чисел.
Кватернион q определяется как
где qi (i = 0, 1, 2, 3) - параметр действительного числа. Единица действительного числа равна 1, а три мнимых
единицы - i, j и k. Это ортогональные пространственные векторы. Алгебра кватернионов не является
коммутативной и удовлетворяет следующим правилам Гамильтона:
Конъюгат кватерниона q* определяется как
и умножение между одним кватернионом и его сопряженным определяется как
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
1. Кватернионная нейронная сеть
И другие операции с кватернионами
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
1. Кватернионная нейронная сеть
Для описания алгоритма обучения многослойной нейронной сети кватернионов рассматривалась многослойная
нейронная сеть кватернионов. Во входном слое кватернионной нейронной сети l-й нейронный вход xl является
кватернионом:
(ℎ )
В скрытом слое, связанном с входным слоем, выход из m-го нейрона блока 𝑧𝑚 1 определяется как
(ℎ
)
(ℎ )
где 𝑤𝑚𝑙10 - вес между l-м нейроном входного слоя и m - м нейроном скрытого слоя, 𝜑𝑚 1 является порогом m-го
нейрона в скрытом слое, а f(·) является активационной функцией нейрона. В p-м скрытом слое выход n-го блока
(ℎ )
нейрона 𝑧𝑚 1 n определяется как
(ℎ
)
(ℎ𝑝 )
где 𝑤𝑛𝑚𝑝 𝑝−1 - вес между m-м нейроном (p - 1) -го скрытого слоя и n - м нейроном p-го скрытого слоя и 𝜑𝑛
порог n-го нейрона в p-м скрытом слое.
-
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
1. Кватернионная нейронная сеть
(0)
В выходном слое выход s-го блока нейрона 𝑧𝑠 определяется как
(𝑜
)
(0)
где 𝑤𝑠𝑚0𝑝 - вес между n-м нейроном p-го скрытого слоя и s-м нейроном выходного слоя, 𝜑𝑠 является порогом sго нейрона в выходе слой. Здесь веса и пороговые значения являются кватернионами, а функция активации
является кватернионной функцией.
Обучение кватернионной нейронной сети проводилось с целью минимизации функции затрат J:
(0)
где ∈s - выходная погрешность, определяемая ∈s = ds - 𝑧𝑠
P указывает индекс шаблона обучения.
, ds - желаемый выход s-го нейрона в выходном слое, а
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
2. Самонастраивающийся регулятор
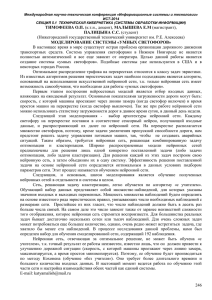
На рис. показана схема самонастраивающегося регулятора обратной связи, где u-управляющий вход,
синтезируемый обычным регулятором, параметры которого настраиваются в режиме онлайн нейронной сетью
кватерниона, y - выход установки, yd -желаемый выход установки, генерируемый эталонной моделью, а r-опорный
вход.
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
2. Самонастраивающийся регулятор
где k - номер выборки, y(k) – выход установки, u(k) – вход установки, n и m – порядки установки, d - мертвое время
установки, а 𝛼𝑢𝑖 , 𝛼𝑦𝑖 и b0 - параметры установки.
Учитывая время простоя установки, многослойная кватернионная нейронная сеть самонастраивающегося ПИДрегулятора была обучена минимизации функции затрат J(k) в режиме онлайн как
где η-коэффициент обучения, а функция стоимости определяется погрешностью выхода:
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
2. Самонастраивающийся регулятор
Градиент функции стоимости по параметрам нейронной сети кватерниона можно рассчитать, используя правило
цепи, как
𝜕𝑦(𝑘)
𝜕𝑢(𝑘)
где 𝜕𝑢(𝑘−𝑑) является установкой Якобиана, 𝜕𝑔(𝑘) является регулятором Якобиана, а градиент
𝜕 𝑧 0 (𝑘)
𝜕𝜔∗ (𝑘)
может быть
вычислен с использованием алгоритма обратного распространения, распространенного на кватернион.
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
3. Вычислительные эксперименты адаптивного регулятора
Чтобы исследовать возможность использования самонастраивающегося ПИД-регулятора с кватернионнонейронной сетью, мы выполнили вычислительные эксперименты, используя следующую SISO дискретновременную нелинейную установку с доминирующей системой второго порядка:
где αadd - коэффициент паразитного члена, а cnon - коэффициент нелинейного члена.
Поскольку предполагается, что установка была линейной, вторым порядком (n = 2, m = 1 и d = 1) для
проектирования нейронной сети кватернионов, входной вектор кватернионной нейронной сети определялся как
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
3. Вычислительные эксперименты адаптивного регулятора
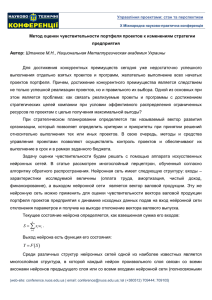
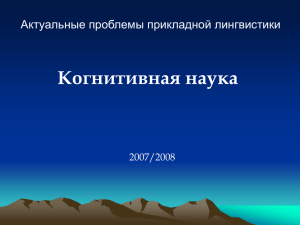
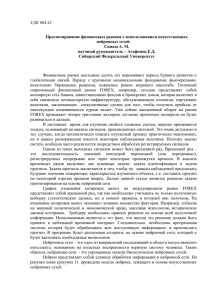
На рисунке показан пример реакции на установку при управлении установкой с использованием разработанного
кватернионно-нейронного автонастраиваемого ПИД-регулятора на основе сети. Здесь число кватернионных
нейронов в скрытых слоях равно M1 = M2 = 4, а установка линейна; параметры завода: αy1 = 1,3, αy2 = 0,3, αadd = 0, b0
= 1, αu1 = 0,7 и cnon = 0.
Экспериментальный результат управления
линейной установкой с использованием
разработанного кватернионно-нейронной
сетью ПЗС-регулятора (сверху: выход
завода, где черная линия указывает
желаемый выход yd (k), а серая линия
указывает на выход завода y (k); нижний:
управляющий вход от ПИД-регулятора).
Самонастраивающийся ПИД-регулятор с использованием кватернионной нейронной сети
3. Вычислительные эксперименты адаптивного регулятора
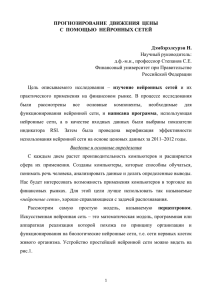
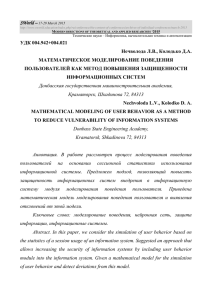
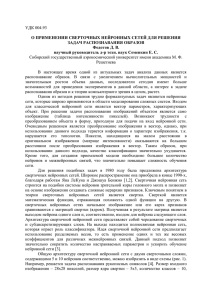
На рисунке показан пример реакции установки для нелинейной установки (αadd = 0,03 и cnon = 0,2 ).
Экспериментальный результат управления
нелинейной установкой с использованием
разработанного кватернионно-нейронной
сети самонастраивающегося ПИДрегулятора (вверху: выход завода, где
черная линия указывает желаемый выход yd
(k), а серая линия указывает на установку
выход y(k); bottom: управляющий вход с
ПИД-регулятора).
Определения и представления
Один полезный способ рассмотреть случайный вектор кватерниона - видеть его как реальный значащий
случайный вектор размера, в четыре раза больший. Однако также можно рассматривать его как комплексный или
кватернионный вектор с более высокой размерностью. Таким образом, для кватернионного случайного вектора
𝑞 ∈ 𝐻𝑁 существует три возможных представления. А именно действительное 𝑞 ∈ 𝑅4𝑁 , комплекс 𝑞 ∈ 𝐶 4𝑁 и
кватернионные 𝑞 ∈ 𝐻4𝑁 -представления. Их выражения:
где † означает спряжение-транспозицию. Эти представления позволяют изучать статистические соотношения
между компонентами случайного вектора кватернионов.
Собственные случайные векторы
Существуют два уровня собственности.
𝐶 𝜂 собственность.
Случайный вектор кватерниона 𝑞 ∈ 𝐻𝑁 называется собственным, если
𝑑
означает «равенство в распределении».
=
Частным случаем, интересным для нас, в дальнейшем будут 𝐶 1 -собственные случайные векторы, для которых
𝑑
𝑞 𝑒 𝑖𝜃 𝑞. Как следствие, ковариационная матрица 𝐶 1 -правильные случайные векторы коммутируют с 𝑖: 𝛬𝑞 𝑖 =
=
𝑖𝛬𝑞 .
Случайный вектор кватернионов является 𝐶 1 -правильным, если :
для одного и только одного чистого единичного кватерниона 𝜂, а где
Собственные случайные векторы
Существуют два уровня собственности.
Н-собственность.
Случайный вектор кватерниона 𝑞 ∈ 𝐻𝑁 называется H-собственным, если:
для любого чистого единичного кватерниона 𝜂. Еще раз, учитывая классический базис для кватернионов
(т.е.{1, 𝑖, 𝑗, 𝑘})
Другое эквивалентное определение для Н-собственности:
Собственные случайные величины и поляризованные сигналы
Рассмотрим теперь поляризованные случайные сигналы с возможно известными параметрами поляризации 𝜌 и f.
Рассмотрим выход двухкомпонентного вектор-датчика. Такой датчик выдает два дискретных сигнала 𝑠1 (n) и n) (с
𝑛 = 1, . . . , 𝑁), которые исходят из вибраций в двух ортогональных направлениях 3D-пространства. Вывод может
быть расположен в векторах 𝑠1,2 = [𝑠1,2 (1)𝑠1,2 (2). . . 𝑠1,2 (𝑁)] 𝑇 . Таким образом, вся 2D-запись, записанная на
датчике, может быть записана в вектор 𝑞, такой как:
где 𝑧1 и 𝑧2 - аналитические сигналы 𝑠1 и 𝑠2
Здесь 𝑠1 и 𝑠2 считаются 𝑖. 𝑖. 𝑑. и гауссовских случайных процессов. Реальная и мнимая части 𝑧1 и 𝑧2 имеют нулевую
среднюю и ту же дисперсию 𝜎 2 . Хорошо известно, что аналитический сигнал является правильным (в сложном
смысле) [6], который включает в себя, что 𝐶𝑧1 = 𝐶𝑧2 = 0. Следовательно, в качестве дисперсии 𝑧1 и 𝑧2 равна 2𝜎 2
(вещественная и мнимая части, имеющие одну и ту же дисперсию и декоррелированные).
Теперь, считая, что записанный сигнал поляризован, существует фазовый сдвиг и отношение амплитуд (обе
поместимые константы вдоль индекса времени здесь):
где 𝜌 и f - параметры поляризации
Собственные случайные величины и поляризованные сигналы
С учетом вышеприведенных предположений легко проверить, что ковариационная матрица случайного вектора q,
взятого из образцов поляризованных сигналов, имеет следующую структуру (комплексное обозначение):
Таким образом, предлагаемое моделирование позволяет рассматривать поляризованный случайный сигнал (с
детерминированным параметром поляризации 𝜌 и f) как 𝐶1 -собственный кватернионный случайный вектор.
Теперь рассмотрим случай, когда записанный сигнал не поляризован. Тогда 𝑧1 и 𝑧2 некоррелированы, поэтому
сигнал можно.
НЕЙРОННАЯ АРХИТЕКТУРА
Нейронная сеть с кватернионом остается естественной в наших рамках. Поэтому преимущества нашей
предлагаемой модели должны приводить к превышению таких сетей по сравнению с реальными сетями,
например, в задаче разделения сигналов.
Многослойные перцептроны (MLP)
Атомами нейронных сетей являются простые вычислительные единицы, которые вычисляют из входных данных x
выход по 𝑦 = 𝑔(𝑓(𝑤, 𝑥)). Таким образом, 𝑓 является так называемой функцией распространения и 𝑔 - так
называемая активационная функция. Вес 𝑤 - свободные параметры, которые регулируются путем обучения. Для
нелинейного 𝑔 группирование нейронов вместе в слоях Ʃ𝑖 𝑔(𝑤𝑖𝑗 𝑥𝑗 + 𝜃𝑗 ) по принципу «вперед-назад» и полностью
связанное приводит к известному многослойному перцептрону (MLP). МЛП обучаются контролируемым
обучением, т. Е. На примерах с целевыми результатами.
Адаптационные веса затем выполняются путем минимизации функции ошибки, например SSE, с помощью
градиентного спуска (обратное распространение [10]). Кватернионный MLP (H-MLP) получается одним, просто
используя кватернионные сущности вместо реальных. В качестве функции активации 𝜎(𝑞)𝐻 = 𝜎 𝑞0 + 𝜎 𝑞1 𝑖 +
𝜎 𝑞2 𝑗 + 𝜎(𝑞3 )𝑘 используется [9].Разделение двух поляризованных сигналов является задачей классификации. В
этом случае H-MLP с одним скрытым слоем двух нейронов является наименьшей значимой квадратичной
архитектурой. Мы увидим, что эта минимальная кватернионная сеть также уже достаточна. Это является прямым
следствием инвариантности распределений в (12) и (15) соответственно.
НЕЙРОННАЯ АРХИТЕКТУРА
Изоморфные метки классов
Для стандартного MLP ни порядок компонентов входного вектора, ни порядок компонентов выходного вектора не
имеют семантического значения. Перестановки не имеют никакого эффекта. Напротив, кватернионы - это кортежи.
Кроме того, оптимальное разделение поляризованных сигналов на H-MLP основано на сохранении структурной
информации, которая требует кортежей данных заранее. В формальном понятии и в более широком контексте это
обсуждается для более широкого класса сетей со значениями в алгебрах Клиффорда в [11]. Здесь есть четыре
возможности для маркировки класса «1»:
Последние три, называемые мнимыми метками, изоморфны. Пусть 𝑥 = 𝑥0 + 𝑥1 𝑖 + 𝑥2 𝑗 + 𝑥3 𝑘 фиксировано. Кроме
того, пусть 𝑟0 + 𝑟1 𝑖 + 𝑟2 𝑗 + 𝑟3 𝑘 = (𝑎 + 𝑏𝑖 + 𝑐𝑗 + 𝑑𝑘)𝑥. Тогда дает
Следовательно, применение соответствующего изоморфизма к каждому сетевому параметру позволяет построить
эквивалентную сеть с другой меткой мнимого класса, чем исходная.
МОДЕЛИРОВАНИЕ
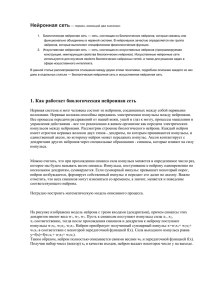
Моделирование было выполнено для синтетических данных, полученных из трех четырехмерных распределений,
перечисленных в таблице 1. Из каждого из них 1000 точек были отбракованы. В каждом случае первые 200
выборочных точек были использованы для обучения, а остальные 800 баллов для тестирования. Заметим, что D3
является H-надлежащим, и оба D1 и D2 являются 𝐶 𝑖 -соответствующими соответственно (по каноническому
идентификатору n{a ⇔ 1, b ⇔ i, c ⇔ j, d ⇔ k}. 𝐶 𝜂 -proper data для 𝜂∈{j, k} была получена из D1, D2 простой
подстановкой компонентов.
Распределения, из которых были созданы данные для
моделирования. N(0, 1) обозначает одномерное
нормальное распределение со средним 0 и дисперсией 1
МОДЕЛИРОВАНИЕ
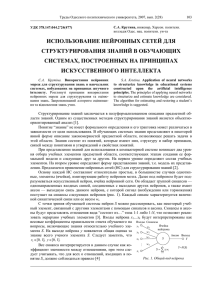
Собственное 𝐶 𝐽 vs H-собственное разделение с
использованием D2 и CL4 (24) для 𝐶 𝐽 -надлежащего
класса. Гистограммы выхода первого скрытого нейрона.
В левом столбце отображается ответ для данных,
соответствующих H. В правой колонке показан ответ для
правильных данных 𝐶 𝐽 . Каждая строка показывает один
компонент вывода.
𝐶 𝐽 -собственное vs H-собственное разделение с
использованием D2 и CL4 (24) для 𝐶 𝐽 -собственного
класса. Гистограммы выхода второго скрытого
нейрона.
МОДЕЛИРОВАНИЕ
𝐶 𝑖 - собственное vs H-собственное разделение с
использованием D2 и СL1 (24) для 𝐶 𝑖 -класса.
Гистограммы выхода первого скрытого нейрона.
Выполнил: Раздельщиков К.С.
Группа: КП-501
Факультет: МТ