Старинец Дмитрий Владимирович Задача оптимального управления ресурсами промышленного предприятия
реклама

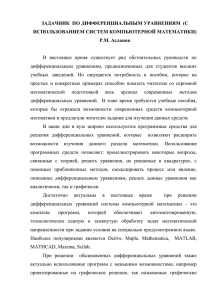
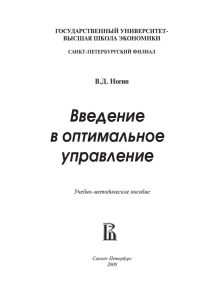
На правах рукописи Старинец Дмитрий Владимирович Задача оптимального управления ресурсами промышленного предприятия с учетом взаимодействия со смежными предприятиями. Специальность 05.13.01. – Системный анализ, управление и обработка информации (промышленность). АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата физико-математических наук Москва - 2009 Работа выполнена в Московском физико-техническом институте (Государственный университет) Научный руководитель: доктор физико-математических наук, профессор Дикусар Василий Васильевич Официальные оппоненты: доктор физико-математических наук Березнев Валентин Александрович доктор физико-математических наук профессор Бутусов Олег Борисович Ведущая организация: Центральный экономико-математический институт РАН Защита диссертации состоится заседании диссертационного 02 апреля 2009г. в совета Д002.017.03 14 часов на при Учреждении Российской академии наук Вычислительный Центр им. А.А. Дородницына РАН по адресу: 119991, г. Москва, ул. Вавилова, д. 40 в конференц-зале. С диссертацией можно ознакомиться в библиотеке Вычислительного центра им. А.А. Дородницына РАН Автореферат разослан 2009 г. Ученый секретарь совета по защите докторских и кандидатских диссертаций кандидат физико-математических наук 2 Мухин А.В. ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность. Развитие отечественного промышленного производства за счет повышения предприятий эффективности может взаимодействия обеспечить решение промышленных целого ряда острых производственных и социально-экономических проблем в условиях кризиса. При этом необходимо отметить, что замещение импорта должно помочь развитию отечественного производства и проведению технического перевооружения российских предприятий, значительный износ оборудования которых приводит к снижению эффективности промышленного производства в целом. достаточно актуальными в современных Эти вопросы становятся условиях экономического кризиса. Отметим, что показатели конкурентоспособности улучшаются при объединении предприятий в рамках корпорации. Большую роль приобретают методики и технологии, которые позволяют повысить уровень производственных и социальных показателей. Особо важное значение приобретают методы подготовки и принятия эффективных управленческих решений. Наступивший очевидную кризис необходимость промышленного пересмотра производства методов выявил управления промышленными предприятиями в сторону улучшения эффективности потребления ресурсов. Настоящая работа посвящена решению важной частной задачи – улучшению промышленных предприятий. Цель работы. Целью работы является: 3 эффективности взаимодействия построение модели взаимодействия промышленных предприятий в условиях кризиса производства; решение задач оптимального управления с фазовыми и смешанными ограничениями (схема Дубовицкого-Милютина) для разработанной модели; решение задач линейного программирования большой размерности методом продолжения решения по параметру; на основании проведенных исследований – предоставить возможность выработки обоснованных эффективных управленческих решений для оптимального развития промышленного производства в условиях кризиса. Методы исследования. Основным инструментом для решения поставленных задач является принцип максимума (схема ДубовицкогоМилютина) и метод продолжения решения по параметру. Поставленные задачи счет (за уравнений) дискретизации сводятся программирования к большой обыкновенных задачам дифференциальных линейного размерности. и нелинейного Применение принципа максимума в дискретном варианте сводит первоначальную задачу к задаче линейного программирования большой размерности. В качестве параметра выступает время. Это позволяет сначала на малом отрезке решать задачу малой размерности и затем полученное приближение используется при его продолжении по параметру. Научная новизна. Решена новая важная задача эффективного управления ресурсами с учетом взаимодействия двух промышленных предприятий в условиях кризиса производства. Разработан новый эффективный подход к решению задачи линейного программирования большой размерности за счет продолжения решения по параметру. Для интегрирования жестких систем обыкновенных дифференциальных уравнений разработаны специальные явные схемы, 4 которые показали свою эффективность при численном решении указанных систем. Также были применены методы параметризации при качественном и численном решении задачи взаимодействия двух промышленных предприятий. В предложенной модели принцип максимума выполняется тривиально, т.е. является вырожденным. Для построения содержательного принципа максимума в правые части обыкновенных дифференциальных уравнений вводятся малые параметры, которые позволяют исследовать задачу с помощью классического принципа максимума. Данный подход является новым, так как по существу применяется регуляризация основной задачи в отличие от известных работ, в которых регуляризация применяется для сопряженной системы уравнений. Обоснованность научных положений. Теоретические положения и выводы диссертации сформулированы в виде утверждений и теорем, которые строго доказаны. Практическая ценность. Модели, методы и алгоритмы, разработанные в диссертации, применялись для решения практических задач взаимодействия промышленных предприятий, а также в учебном процессе в Московском ФизикоТехническом институте и в Вычислительном Центре РАН. Предложенные методы продолжения решения регуляризации вырожденных теоретических исследованиях по задач параметру, могут при а быть решении также методы использованы прикладных в задач оптимального управления. Был адаптирован пакет прикладных программ БАЛАНС-2 для решения задачи ЛП и использован для практических численных производства расчетов показателей эффективности на модельном примере (с применением метода продолжения решения по параметрам). 5 Апробация работы. Основные положения исследования докладывались и обсуждались на международной конференции в Черногории (International Conference «Nonlinear Analysis and Optimization Problems», Montenegrin Academy of Sciences and Arts, Petrovac, Montenegro, October 06th – 10th , 2008), на 14-ой Байкальской школе-семинаре СО РАН «Методы оптимизации и их приложения». (Иркутск-Байкал 2-8-го июля 2008г.) и на научных семинарах в МФТИ и в ВЦ РАН. Личный вклад. 1) Проведен качественный и количественный анализ задачи эффективного управления взаимодействием двух промышленных предприятий. 2) Разработан прямой численный метод построения гипотезы по определению множества активных индексов для задачи управления с ограничениями типа неравенств (геометрия оптимальной траектории). 3) Предложена регуляризация вырожденного случая принципа максимума. 4) Разработан явный эффективный численный метод решения жестких систем ОДУ. 5) Автором адаптирован использование которого пакет прикладных программ БАЛАНС-2, позволяет выработать обоснованные управленческие решения. Публикации. Основные результаты исследования отражены в восьми публикациях. Список работ приведен в конце автореферата. В совместных с соавторами работах автору принадлежит 50% результатов. Структура и объем работы. Диссертация состоит из введения и четырех глав и двух приложений. 6 ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ Во «Введение» приведены цели исследования, актуальность, обзор литературы по данному вопросу и основные результаты, выносимые на защиту. Дана характеристика научной новизны, практической значимости и указаны апробации полученных результатов. В первой главе приводятся постановки задач и рассматриваются вопросы практической реализации предлагаемого подхода на примере линеаризации, дискретной аппроксимации и аналитического исследования для динамических моделей взаимодействия двух промышленных предприятий. Приводится детальное содержательное описание моделируемой системы для случая параметрической линеаризации рассматриваемой модели. Динамическая модель взаимодействия двух предприятий имеет вид: Задача А: V Q F R S V F Q R, 0 а ограничения на управления и фазовые переменные соответственно Q Q(t ) Q ; R R(t ) R ; t [0, T ] V (t ) 0;F (t ) 0;S (t ) 0;t [0,T ] , найти max S (T ) при условиях V (0) 0 ; F (0) 0 ; S (0) 0 ; V (T ) 0 ; F (T ) 0 . Здесь: V t - общий объем ресурсов, передаваемый от предприятия – донора предприятию – акцептору; Q t - интенсивность поставки ресурсов (управление); 7 F t - суммарный объем производства промышленной продукции; R t - интенсивность промышленного производства (управление); S t - прибыль от реализации произведенной продукции; Остальные переменные 0 (t ) , (t ) являются параметрами модели. Доказаны теоремы: 1. Если параметры и управления задачи А измеримы и для правых частей дифференциальных уравнений выполнены условия Филиппова А.Ф. и существует хотя бы одна допустимая пара, удовлетворяющая всем условиям задачи А, то оптимальное решение существует и единственно. 2. Принцип максимума для задачи А выполняется тривиально. Далее предлагается регуляризация задачи А за счет введения малых параметров в правые части дифференциальных уравнений. При этом получается нетривиальный принцип максимума. 1200 1000 800 600 S V 400 F 200 0 0 10 20 30 40 50 -200 График 1 8 60 70 На графиках 1 и 2 приведены характерные решения для фиксированных параметров Q , Q , R , R и 0 (t ) , (t ) t [0, T ] . Приведенные графики построены с помощью графического пакета и адаптированного пакета прикладных программ БАЛАНС — 2. Проверка правильности построения гипотезы о геометрии оптимальной траектории для рассматриваемых задач выполнялась по принципу максимума Понтрягина. На графике 1 приведена динамика фазовых переменных, откуда хорошо видно, что при кризисных явлениях нет никакой прибыли на определенном интервале времени, что характеризуется поведением кривой S t . Здесь по оси ординат отложены условные единицы значений фазовых переменных, а по оси абсцисс характерное время с выбором подходящего масштаба. 5 0,006 4 0,005 3 2 0,004 1 0 0 10 20 30 40 50 60 70 0,003 -1 -2 0,002 -3 Q -4 R 0,001 po -5 pk -6 0 График 2 9 Для рассматриваемой модели в качестве примера параметр-функции задавались в виде: a0 , t [0, 0 ) 0 (t ) b0 , t [ 0 , 0 ) a , t [ , T ] 0 0 a , t [0, ) (t ) b , t [ , ) a , t [ , T ] , Где a0 , b0 , a, b - константы. График 2 иллюстрирует динамику управляющих функций (для модельного примера). Значения на оси ординат слева характеризуют интенсивности, а справа — параметр-функции. А по оси абсцисс отложено характерное время. Аналитически показано, что существует область изменения параметров, для которой выполняется нетривиальный принцип максимума. Во второй главе приводятся постановки линейных задач оптимального управления со смешанными ограничениями. Под задачей оптимального управления со смешанными ограничениями задача следующего вида: найти управление ut , дающее понимается минимум функционалу d t xt e t ut dt T T T T x T min , 0 uV ( x ,t ) при условиях x (t ) A(t ) x(t ) B(t )u(t ) c(t ) ; x(0) x0 ; x(T ) S , S x R n | x 0; V x, t u R r | G(t ) x(t ) K (t )u(t ) w(t ) 0 , необходимые условия оптимальности имеют вид: j (t )(G (t ) x (t ) K (t )u (t ) w(t )) j 0 , j 1,, m , 10 0 e T (t ) T (t ) B (t ) T (t ) K (t ) 0 , u t arg max 0 (d T (t ) x (t ) e T (t )v(t )) T (t )( A(t ) x (t ) B(t )v(t ) c(t ) ) , vV x ,t где вектор t является решением системы уравнений T 0 d T (t ) T (t ) A(t ) T (t )G (t ) с условиями T T 0 T C 1 . T Далее рассматриваются достаточные условия оптимального управления, основанные на методике сведения линейной задачи ОУ со смешанными ограничениями к задаче ЛП в банаховых пространствах, предложенной А.М. Тер-Крикоровым. Далее рассматриваются две задачи: Задача 1. Найти u t Lm 0, T , управления дающие максимум линейному функционалу T J u x T x t at u t bt dt max (1) 0 при следующих ограничениях: (2) x x At uBt a t , x 0 , x (3) T Q c , x Ct u Dt b t , u 0 . (4) Матрицы At , Bt , Ct и Dt и векторы a t , b t имеют ограниченные измеримые компоненты, технологические и весовые которые выражают обобщенные показатели. Соответствующие матрицы и векторы имеют следующие размеры: An n , Bm n , Cn r , Dm r , 11 Qn q , a n , b r , n , c q . Векторы с символом являются строками, без – столбцами. Задача 2. Найти управления vt L1r 0, T , R q , дающие минимум линейному функционалу T J v x 0 c b t v a t x dt min (5) 0 при следующих ограничениях: x At x Ct v at , (6) xT Q , (7) Bt x Dt v bt , v 0 . (8) Достаточные условия оптимальности задач 1 и 2 даются следующей теоремой: Теорема 1 (Тер-Крикоров). Пусть для некоторых допустимых управлений u t и v t , задач 1 и 2 выполнены условия ui Bt x Dt v bt i 0 , i 1, m ; (9) x Ct u Dt b t v 0 , j 1, r ; x T Q c 0 , k 1, q , j (10) j (11) k k причем первые два равенства выполняются почти при всех t . Тогда u t , x t будет оптимальным решением задачи 1, а v t , , x t будет оптимальным решением задачи 2. Необходимые условия оптимальности для задачи 1 формулируются в терминах принципа максимума Понтрягина с использованием сопряженных переменных t . Связь сопряженных переменных t и переменных задачи 2 дается следующими леммами: 12 Лемма 1. Если при допустимом управлении задачи 1 существует вектор сопряженных переменных t , константа 0 0 и векторы множителей Лагранжа t , t , удовлетворяющие дифференциальным уравнениям и краевым условиям для t , условиям Блисса и условиям дополняющей нежесткости для t , t , то t и t являются допустимыми управлением и фазовым вектором задачи 2. Лемма 2. Если существуют допустимые управления u t , vt , задач 1 и 2, и они удовлетворяют условиям (2.5.9)-(2.5.11), то вектор траектории xt задачи (2.5.5)-(2.5.8), соответствующей управлению vt , является вектором сопряженных переменных t задачи (2.5.1)-(2.5.4) при 0 1 . На основании лемм 1 и 2 теорема 1 переформулируется следующим образом: Теорема 2. Если при данном допустимом управлении u t задачи 1 существуют число 0 1 , кусочно-гладкая вектор-функция t , измеримые вектор-функции t 0 , t 0 и вектор 0 такие, что выполняются условия (2.5.12)-(2.5.15), то u t – оптимальное управление задачи 1. Таким образом, теорема 2 дает возможность использовать сопряженные переменные t для доказательства оптимальности полученного решения в задаче ОУ. Третья глава посвящена вопросу нахождения первого приближения геометрии оптимальной траектории при смешанных ограничениях, типа неравенств. Исследуется вопрос об эффективном (с точки зрения затрат машинных ресурсов) способе нахождения численного решения задач 1 и 2. Требование эффективного решения обусловлено многократным решением задач 1 и 2 при различных значениях параметров. Известно, что 13 достаточно экономичные методы решения задач класса 1 – 2 базируются на использовании методов прогонки, требующих априорного разделения для каждого t [0, T ] множества условий g j ( x, u, t ) 0 ; j 1, m на подмножествах активных и неактивных ограничений. При этом, как правило, используются какие-либо специфические особенности системы ограничений. В этом случае приемлемой альтернативой сложным схемам решения задач оптимального управления методом прогонки может служить схема формирования гипотезы о геометрии оптимальной траектории задачи 1-2, основанная на использовании приближенного решения, получаемого путем дискретизации времени. Преимущества предлагаемого метода заключаются в том, что он не различает отдельные ограничения на ограничения по фазам, управлениям или смешанным ограничениям. Следовательно, метод решения дискретизированной задачи не будет обладать недостатками метода прогонки. Дискретизированная задача является задачей ЛП, и в этой задаче фазовые и управляющие переменные уже неразличимы, что является преимуществом данного подхода. Следовательно, для получения решения дискретизированной задачи необходимо надежное программное средство. Суть рассматриваемой схемы выделения множества активных ограничений заключается в дискретизации времени и сведении исходной задачи 1-2 к вспомогательной задаче математического программирования с конечным числом переменных. Дифференциальные уравнения при этом заменяются конечно-разностными по схеме Эйлера первого или второго порядка точности. Подобные задачи рассмотрены в трудах Ю.Г. Евтушенко. Решение данной вспомогательной задачи рассматривается как некоторое приближение к решению исходной, и на его основании производится выделение подмножества активных ограничений. В четвертой главе излагаются различные формы задач линейного программирования (ЛП), куда входят также несобственные задачи. Здесь 14 для решения задачи ЛП предлагается метод введения параметра в целевую функцию. Это дало возможность получить эффективную оценку решения задачи ЛП. Кроме того использовался адаптированный пакет прикладных программ БАЛАНС - 2, обеспечивающий многократное формирование условий нахождения решения и создания необходимых для анализа выходных файлов. Была использована реализация для ОС Windows 2K-XP базовой версии алгоритма анализа неполных математических моделей (разработанная в 1985 году в IIASA, в рамках проекта Regional Development, на языке "Fortran-IV" для ПЭВМ Altus-2. Авторы: Ким К.В. и Умнов А.Е.), адаптированная для языка С++ на кафедре высшей математики МФТИ в рамках совместных исследований с ЗАО «Оптимизационные системы и технологии». В комплекс программных средств решения задач ЛП были включены модули диагностики и анализа качества (получаемых на основе найденных решений) гипотез об оптимальной геометрии фазовых траекторий. Специальные программные средства были разработаны для решения сопряженных задач, проверки формализма Понтрягина-Дубовицкого-Милютина и прямой проверки оптимальности решения на множестве допустимых вариаций. В приложении 1 изложен новый эффективный метод интегрирования жестких систем обыкновенных дифференциальных уравнений на базе параметризации явных схем. В приложении 2 исследуется задача регуляризации вырожденного принципа максимума за счет введения управляющих параметров в правые части обыкновенных дифференциальных уравнений. Приведен пример аналитического исследования содержательного принципа максимума. Выводы: Предложена модель взаимодействия двух промышленных предприятий, которая описывается системой обыкновенных дифференциальных уравнений с фазовыми и смешанными ограничениями. Предложены явные численные методы для интегрирования жестких 15 систем обыкновенных дифференциальных уравнений. Предложен метод оценки геометрии оптимальной траектории. Предложен метод регуляризации вырожденного принципа максимума в задаче взаимодействия двух промышленных предприятий. Доказана теорема существования и единственности оптимального решения в задаче взаимодействия. Основные результаты диссертации опубликованы в работах: Дикусар В.В., Старинец Д. В.Управление риском портфеля ценных бумаг Труды ИСА РАН. Т.31(1) Динамика неоднородных систем. 2007г.С.14-22. Старинец Д. В. Методы продолжения при решении краевых задач оптимального управления. Труды ИСА РАН. Т.31(1) Динамика неоднородных систем. 2007г.С.74-80. Дикусар Э.В., Чекарев Д.А., Старинец Д.В. Достаточные условия экстремума в линейной задаче оптимального управления. Труды ИСА РАН. Т.32(1) Динамика неоднородных систем. 2008г С. 16-23. Дикусар Э.В., Чекарев Д.А., Старинец Д.В. Сходимость дискретных аппроксимаций. Труды ИСА РАН. Т.32(1) Динамика неоднородных систем. 2008г. С. 101-110. Дикусар Э.В., Чекарев Д.А., Старинец Д.В. Численно-аналитический метод решения задач оптимального управления со смешанными ограничениями. Труды ИСА РАН. Т.32(1) Динамика неоднородных систем. 2008г.С. 111122. Дикусар В.В., Старинец Д.В. Методы интегрирования жестких систем явными методами. Труды 14-ой Байкальской школы-семинара «Методы оптимизации и их приложения». Иркутск-Байкал 2-8-го июля 2008г. т.3 ИСЭМ СО РАН 2008. С. 77-85. Dikusar V.V., Starinets D.V. Continuation methods for solving boundary value problems. Abstracts of International Conference «Nonlinear Analysis and 16 Optimization Problems», Montenegrin Academy of Sciences and Arts, Petrovac, Montenegro, October 06th – 10th , 2008. P.37. Dikusar V.V., Starinets D.V. Determined portfolio dynamic problem. Abstracts of International Conference «Nonlinear Analysis and Optimization Problems», Montenegrin Academy of Sciences and Arts, Petrovac, Montenegro, October 06th – 10th , 2008. P.38. 17