Монограф - Камышинский технологический институт
реклама

Е. Г. Крушель, И. В. Степанченко
ИНФОРМАЦИОННОЕ ЗАПАЗДЫВАНИЕ
В ЦИФРОВЫХ СИСТЕМАХ
УПРАВЛЕНИЯ
3
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ)
ВОЛГОГРАДСКОГО ГОСУДАРСТВЕННОГО ТЕХНИЧЕСКОГО УНИВЕРСИТЕТА
Е. Г. Крушель, И. В. Степанченко
ИНФОРМАЦИОННОЕ ЗАПАЗДЫВАНИЕ
В ЦИФРОВЫХ СИСТЕМАХ
УПРАВЛЕНИЯ
Монография
РПК «Политехник»
Волгоград
2004
4
УДК 681.5:682.3 (075.8)
К 84
Рецензенты: кафедра «Системотехника» Саратовского государственного
технического университета;
заведующий кафедрой «Радиотехнические системы» Самарского государственного технического университета, д.т.н.,
профессор В. Н. Нестеров;
ученый секретарь Института точной механики и проблем
управления РАН, к.т.н., доцент В. А. Иващенко.
Крушель Е. Г., Степанченко И. В. Информационное запаздывание
в цифровых системах управления: Монография / ВолгГТУ. – Волгоград,
2004. – 124 с.
ISBN 5-230-04303-2
Рассматриваются вопросы проектирования и исследования цифровых систем управления при наличии информационного запаздывания.
Прослеживаются этапы от формирования модели управления, системы
показателей качества, постановки экспериментов до выбора и реализации
алгоритма управления.
Описываются алгоритмы управления, способы учета и снижения влияния информационного запаздывания, алгоритмы настройки параметров регулятора. Приводится описание архитектуры распределенной вычислительной системы для снижения влияния информационного запаздывания.
Монография рассчитана на студентов, аспирантов и специалистов
различных профилей, занимающихся вопросами построения и модификации цифровых систем управления. Материал монографии может послужить основой спецкурсов.
Ил. 36. Табл. 13. Библиогр.: 90 назв.
Печатается по решению редакционно-издательского совета
Волгоградского государственного технического университета
© Крушель Е. Г.,
ISBN5-230-04303-2
Степанченко И. В., 2004
© Волгоградский
государственный
технический
университет, 2004
5
Научное издание
Елена Георгиевна Крушель
Илья Викторович Степанченко
ИНФОРМАЦИОННОЕ ЗАПАЗДЫВАНИЕ
В ЦИФРОВЫХ СИСТЕМАХ УПРАВЛЕНИЯ
Монография
Редактирование, корректура:
Попова Л. В., Просондеев М. И.
Компьютерная верстка:
Сарафанова Н. М.
Темплан 2004 г., поз. № 184.
Лицензия ИД № 04790 от 18 мая 2001 г.
Подписано в печать 01.06.04. Формат 60×84 1/16.
Бумага потребительская. Гарнитура «Times».
Усл. печ. л. 7,75. Усл. авт. л. 7,56.
Тираж 100 экз. Заказ
Волгоградский государственный технический университет.
400131 Волгоград, просп. им. В.И. Ленина, 28.
РПК «Политехник»
Волгоградского государственного технического университета.
400131 Волгоград, ул. Советская, 35.
Отпечатано в муниципальном унитарном предприятии
«Камышинская типография»
Лицензия ИД № 05440 от 20 июля 2001 г.
403882 Волгоградская обл., г. Камышин, ул. Красная, 14.
6
СОДЕРЖАНИЕ
ВВЕДЕНИЕ ...................................................................................................10
1. ПОСТАНОВКИ ЗАДАЧ УЧЕТА ИНФОРМАЦИОННОГО
ЗАПАЗДЫВАНИЯ ПРИ ПРОЕКТИРОВАНИИ СИСТЕМ
УПРАВЛЕНИЯ ДИСКРЕТНЫМИ ДИНАМИЧЕСКИМИ
ОБЪЕКТАМИ ............................................................................................... 13
1.1. ОБЩАЯ ХАРАКТЕРИСТИКА ВЫБРАННОГО НАПРАВЛЕНИЯ
ИССЛЕДОВАНИЙ .................................................................................... 13
1.2. ОБЩАЯ ХАРАКТЕРИСТИКА СИСТЕМ УПРАВЛЕНИЯ С
ИНФОРМАЦИОННЫМ ЗАПАЗДЫВАНИЕМ ............................................... 15
1.3. ОБЗОР ЗАДАЧ И СРЕДСТВ ИМИТАЦИОННОГО МОДЕЛИРОВАНИЯ САУ.
ВЫБОР ЯЗЫКА ПРОГРАММИРОВАНИЯ ДЛЯ ИМИТАЦИОННОГО
МОДЕЛИРОВАНИЯ САУ С ИНФОРМАЦИОННЫМ ЗАПАЗДЫВАНИЕМ...... 19
1.4. ОБЩАЯ СТРУКТУРА И ФУНКЦИИ ПРОГРАММНОГО КОМПЛЕКСА ДЛЯ
ИССЛЕДОВАНИЯ САУ С ИНФОРМАЦИОННЫМ ЗАПАЗДЫВАНИЕМ ........ 22
1.5. ВЫВОДЫ .............................................................................................. 24
2. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ЗАДАЧ
ИССЛЕДОВАНИЯ ВЛИЯНИЯ ИНФОРМАЦИОННОГО
ЗАПАЗДЫВАНИЯ НА КАЧЕСТВО УПРАВЛЕНИЯ
ДИСКРЕТНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ....................26
2.1. МОДЕЛИ ОБЪЕКТА УПРАВЛЕНИЯ И КАНАЛОВ ПЕРЕДАЧИ ДАННЫХ В
ПРОГРАММНОМ КОМПЛЕКСЕ ДЛЯ ИССЛЕДОВАНИЯ САУ С
ИНФОРМАЦИОННЫМ ЗАПАЗДЫВАНИЕМ ............................................... 26
2.1.1. Модель объекта управления .................................................26
2.1.2. Модели каналов передачи данных от объекта управления
к управляющему устройству и от управляющего
устройства к объекту управления ..........................................32
2.2. СИСТЕМА ПОКАЗАТЕЛЕЙ КАЧЕСТВА И ВЫЧИСЛИТЕЛЬНЫХ
ХАРАКТЕРИСТИК ДЛЯ ОЦЕНКИ ПРОЦЕССА И АЛГОРИТМА
УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ..................................... 35
2.3. БИБЛИОТЕКА АЛГОРИТМОВ УПРАВЛЕНИЯ ДИСКРЕТНЫМИ
ДИНАМИЧЕСКИМИ ПРОЦЕССАМИ И ОЦЕНКА ИНФОРМАЦИОННОГО
ЗАПАЗДЫВАНИЯ, ВНОСИМОГО ИХ РЕАЛИЗАЦИЕЙ ................................ 42
2.3.1. Постановка задачи аналитического конструирования
оптимальных регуляторов (обзор) .........................................44
2.3.2. Две схемы реализации задачи АКОР ...................................48
7
2.3.3. Частный случай задачи АКОР ..............................................50
2.3.4. Перечень настраиваемых параметров задачи АКОР ..........52
2.3.5. Оценка вычислительной сложности схем реализации
расчетов задачи АКОР ............................................................ 53
2.3.6. Постановка задачи разработки алгоритмов для
цифрового регулятора с пропорционально-интегральнодифференциальным законом управления ............................. 65
2.3.7. Адаптация параметров пропорционально-интегральнодифференциального регулятора .............................................66
2.4. ВЫВОДЫ .............................................................................................. 72
3. МОДЕЛИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С ИНФОРМАЦИОННЫМ
ЗАПАЗДЫВАНИЕМ....................................................................................74
3.1. ПЕРЕЧЕНЬ И ХАРАКТЕРИСТИКА ВЫЧИСЛИТЕЛЬНЫХ
ЭКСПЕРИМЕНТОВ ДЛЯ ИССЛЕДОВАНИЯ СИСТЕМ УПРАВЛЕНИЯ
ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С УЧЕТОМ ОГРАНИЧЕННОСТИ
РЕСУРСОВ ТЕХНИЧЕСКИХ СРЕДСТВ ...................................................... 74
3.1.1. Методика проведения вычислительных экспериментов ....76
3.2. ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗАЦИИ ИССЛЕДОВАНИЯ
СИСТЕМ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПРИ
ОГРАНИЧЕННОСТИ РЕСУРСОВ ТЕХНИЧЕСКИХ СРЕДСТВ........................ 78
3.2.1. Требования к программному комплексу ............................. 78
3.2.2. Структура программного комплекса ....................................79
3.3. ОСНОВНЫЕ РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЙ СИСТЕМ УПРАВЛЕНИЯ
ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПРИ ОГРАНИЧЕННЫХ РЕСУРСАХ
ТЕХНИЧЕСКИХ СРЕДСТВ........................................................................ 82
3.3.1. Группа вычислительных экспериментов № 1 .....................82
3.3.2. Группа вычислительных экспериментов № 2 .....................88
3.3.3. Группа вычислительных экспериментов № 3 .....................90
3.3.4. Группа вычислительных экспериментов № 4 .....................91
3.4. ВЫВОДЫ .............................................................................................. 93
4. РАСПРЕДЕЛЕННЫЕ СТРУКТУРЫ АЛГОРИТМОВ,
УМЕНЬШАЮЩИЕ ИНФОРМАЦИОННОЕ ЗАПАЗДЫВАНИЕ
ЗА СЧЕТ ПАРАЛЛЕЛЬНЫХ ВЫЧИСЛЕНИЙ .....................................95
4.1. РАСПРЕДЕЛЕННАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА И ЕЕ
ХАРАКТЕРИСТИКИ: ОСНОВНЫЕ ПОНЯТИЯ ............................................ 95
4.2. ПОСТАНОВКА ЗАДАЧИ ИССЛЕДОВАНИЯ РАСПРЕДЕЛЕННЫХ
АЛГОРИТМОВ НАСТРОЙКИ КОЭФФИЦИЕНТОВ ПИД-РЕГУЛЯТОРА В
ПРОЦЕССЕ УПРАВЛЕНИЯ ....................................................................... 99
8
4.3. ОБЩАЯ СТРУКТУРА РАСПРЕДЕЛЕННОЙ ВЫЧИСЛИТЕЛЬНОЙ
СИСТЕМЫ. ВЫБОР СРЕДСТВ РЕАЛИЗАЦИИ .......................................... 100
4.4. ИССЛЕДОВАНИЕ РАСПРЕДЕЛЕННЫХ АЛГОРИТМОВ АДАПТАЦИИ
ПИД-РЕГУЛЯТОРА НА БАЗЕ ГЕТЕРОГЕННОЙ ВЫЧИСЛИТЕЛЬНОЙ
СЕТИ .................................................................................................... 105
4.4.1. Группа вычислительных экспериментов № 1 ...................106
4.4.2. Группа вычислительных экспериментов № 2 ...................107
4.4.3. Основные результаты вычислительных экспериментов ..108
4.5. ОПТИМИЗАЦИЯ ЗАГРУЗКИ ГЕТЕРОГЕННОЙ ВЫЧИСЛИТЕЛЬНОЙ
СЕТИ .................................................................................................... 114
4.6. ВЫВОДЫ ............................................................................................ 116
ЗАКЛЮЧЕНИЕ .......................................................................................... 118
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ .............................. 120
ПРИЛОЖЕНИЕ ................................................................................................................................................ 122
9
ВВЕДЕНИЕ
Прогресс в области автоматического управления в значительной степени связан с переводом технических средств на цифровую основу. Появление цифровых датчиков, преобразователей, средств реализации управляющих воздействий и особенно цифровых регуляторов открывает принципиальную возможность реализации гораздо более сложных структур и
алгоритмов обработки информации и управления по сравнению с традиционными вариантами. Однако алгоритмы, встраиваемые в разрабатываемые
или освоенные промышленностью современные цифровые регуляторы, в
подавляющем большинстве случаев являются дискретной формой реализации непрерывных во времени линейных законов управления [24, 43, 44,
46], освоенных и широко распространенных применительно к аналоговым
техническим средствам. Усовершенствование алгоритмов относится, в основном, к встраиванию программ адаптации параметров регулятора в ходе
работы системы управления [21, 30, 44, 73, 84, 88, 91]. Немногочисленные
примеры использования законов управления, синтезированных на базе
строгих теоретических позиций (в частности, оптимизационных), носят, в
основном, исследовательский характер [1, 29, 31, 36, 42].
Представляет интерес создание методики и аппарата для обоснования целесообразности усложнения моделей и алгоритмов на этапе проектирования системы автоматического управления (САУ).
Актуальность задачи в решении теоретических вопросов управления
объектами с помощью цифровых средств состоит в выработке подхода к
учету принципиальной ограниченности ресурсов цифровой вычислительной техники управления. В предшествующей работе Асанова М. С. «Оптимизация замкнутых систем управления с учетом ограниченного быстродействия технических средств» [6] в качестве параметра, который требуется учитывать на этапе синтеза цифровых алгоритмов, рассматривается ограниченность быстродействия средств контроля и реализации
управляющих воздействий. Поскольку средства управления производственными объектами реализуются на базе микропроцессорной техники,
требуется учитывать также объемы оперативной и внешней памяти и разрядность цифровых средств, реализующих алгоритмы. Выработка средств
решения таких задач является одной из важных проблем.
Актуальность задачи в решении прикладных задач подтверждается потребностью в средствах моделирования для проектирования цифровых систем управления, с помощью которых можно было бы провести сопоставление различных вариантов алгоритмов и способов их реализации, и на их основе обосновать выбор алгоритмического обеспечения системы и оценить
значения показателей качества управления, достижимые при использовании
комплекса технических средств, предусмотренных в проекте системы авто10
матизации. Для реализации этой задачи в работе предлагается программный
комплекс, позволяющий моделировать работу цифровой системы управления с учетом ограниченности ресурсов технических средств.
Актуальность задачи с позиции применения современных идей вычислительной техники при синтезе цифровых алгоритмов состоит в переносе концепций распределенных вычислений, развиваемых в рамках сетевых и интернет-технологий, в сферу управления динамическими процессами. Базой для решения таких задач является учет информационного
запаздывания, вносимого в систему управления техническими средствами, благодаря чему удается сопоставить как различные алгоритмы управления, так и различные варианты их реализации и организации.
Объектом исследования в данной монографии являются дискретные системы управления динамическими процессами с информационным
запаздыванием в технических приложениях.
В монографии решаются следующие задачи:
1. Анализ особенностей цифровых систем управления динамическим
объектом, связанных с ограниченностью ресурсов управляющей техники,
постановка задачи выбора рационального соотношения между уровнем
сложности модели объекта и алгоритма управления, с одной стороны, и
возможностями средств управления, с другой стороны.
2. Создание программного комплекса для моделирования цифровых
систем с ограниченными ресурсами техники управления, в состав которого входит библиотека алгоритмов управления разной сложности, библиотека вариантов их цифровой реализации и средств формирования
дискретной модели непрерывного многомерного объекта управления.
3. Разработка методики вычислительных экспериментов с моделями
цифровых систем управления, базирующейся на предлагаемой в данной
работе совокупности показателей качества управления.
4. Конструирование различных вариантов реализации ряда алгоритмов
на базе идей распределенных вычислений и оценка эффективности распараллеливания алгоритма с использованием техники с гетерогенными характеристиками.
5. Разработка методики повышения быстродействия алгоритмов
прямого поиска и генетических алгоритмов настройки параметров цифровых систем в реальном времени на основе рациональной организации
распределенных вычислений.
В качестве основных методов исследования в работе использованы
математические методы, методы системного анализа, методы объектноориентированного анализа и проектирования программных средств. Проведение исследований систем управления динамическими процессами с
информационным запаздыванием базируется на методах имитационного
моделирования и планирования экспериментов.
11
Обоснованность и достоверность полученных данных и зависимостей обеспечивается внутренней непротиворечивостью результатов исследования и их соответствием теоретическим положениям теории
управления, кибернетики, теории оптимизации и адаптации; последовательным проведением имитационных экспериментов, согласованием результатов экспериментов, полученных с помощью разработанных программных комплексов, с результатами расчетов с помощью коммерческих математических пакетов.
Объем и структура работы. Монография состоит из введения, четырех глав и заключения. Краткое содержание глав.
В главе 1 дано обоснование необходимости учета ограниченности совокупности параметров технических средств реализации алгоритмов
управления (быстродействия, объема памяти и разрядности) на этапе проектирования многомерным линейным объектом. В развитии идей, изложенных в работе Асанова М. С. «Оптимизация замкнутых систем управления с учетом ограниченного быстродействия технических средств» [6],
расширено понятие информационного запаздывания, вносимого в систему
техническими средствами, путем учета временных задержек, возникающих
в системе из-за ограниченности памяти и организации вычислений на технических средствах с ограниченной разрядностью.
В главе 2 приводится математическое описание исследуемой дискретной системы управления, различных вычислительных схем оптимальных законов управления, алгоритмов настройки параметров типовых
законов управления, а также проводится анализ их вычислительных характеристик с точки зрения требований к быстродействию, объему памяти, разрядности технических средств.
Глава 3 посвящена описанию вычислительных экспериментов с моделями цифровых систем управления с учетом информационного запаздывания на базе разработанного программного комплекса, описание которого также приводится в данной главе.
Глава 4 посвящена идеям реализации алгоритмов управления на базе распределенных вычислений, позволяющих параллельно во времени
выполнять отдельные этапы трудоемких алгоритмов.
Считаем своим приятным долгом выразить глубокую признательность всему коллективу кафедры «Автоматизированные системы обработки информации и управления» Камышинского технологического института (филиала) Волгоградского государственного технического университета за постоянную помощь и поддержку при выполнении работы и
обсуждении результатов.
12
1. ПОСТАНОВКИ ЗАДАЧ УЧЕТА
ИНФОРМАЦИОННОГО ЗАПАЗДЫВАНИЯ ПРИ
ПРОЕКТИРОВАНИИ СИСТЕМ УПРАВЛЕНИЯ
ДИСКРЕТНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
1.1. Общая характеристика выбранного направления исследований
Традиционно при создании дискретной системы управления (ДСУ)
должны быть решены следующие задачи [6, 43, 44, 46, 49]:
формирование математической модели, адекватной реальному физическому процессу, т. е. отражающей существенные, с точки зрения исследователя, свойства управляемого объекта. Кроме сложности самого
описания модели в данной задаче, существует проблема «точностьсложность». Чем выше точность описания реального объекта управления,
тем, как правило, сложнее это описание и тем сложнее разрешать все
остальные задачи, связанные с созданием, исследованием, сопровождением ДСУ. Нахождение компромисса между точностью описания и его
сложностью является не вполне формализуемой и во многом творческой
задачей инженера-проектировщика;
выбор структуры управляющей системы (количества уровней
иерархии и подсистем на каждом уровне; структуры вычислительного
процесса; структуры информационной системы; организации взаимодействия различных подсистем системы управления и т. п.). Данная задача
может быть значительно упрощена, если найти подобную систему и при
удовлетворительных показателях качества взять ее в качестве шаблона.
Формирование банка шаблонов является одним из перспективных направлений решения данной задачи. В противном случае данная задача так же
трудно формализуема, как и предыдущая;
формулировка и решение задачи синтеза алгоритма управления.
Решить задачу синтеза алгоритма управления для сформированной сложной точной математической модели объекта управления и сложной архитектуры системы управления часто не удается. В этих случаях сформулированная задача синтеза заменяется приближенной (базирующейся на
приближенной модели объекта управления и более прострой архитектуре
системы управления), таким образом, чтобы выбранный метод решения,
точность вычислений и приближений позволили достичь желаемых показателей качества управления. Известно, что увеличение точности приближения часто приводит к увеличению размерности задачи, что приводит к увеличению вычислительной сложности полученного алгоритма
управления. Кроме того, увеличение точности вычислений повышает вычислительную сложность алгоритма управления;
13
техническая реализация САУ: ее проектирование, внедрение и
анализ функционирования в реальных условиях; проверка соответствия
фактических показателей качества управления заявленным в техническом задании.
Из приведенного перечня задач разработки дискретных САУ выделим одну из недостаточно изученных задач, связанную с влиянием ограниченности ресурсов технических средств на качество ДСУ. В предшествующих работах [44, 46] содержатся гипотезы о развитии теории
управления в направлении учета временных задержек, связанных с реализацией алгоритмов сбора и обработки информации (в частности, в [46]
высказано предположение о возможности строгого обоснования решений
по структуре и организации САУ на основе сопоставления вносимых ими
временных задержек). Более подробно в работах [5, 6, 7, 44] рассматривались задачи, связанные с учетом одного из ресурсов техники управления – ограниченности ее быстродействия.
Предлагаемая работа направлена на дальнейшее развитие подходов
и методов исследования дискретных САУ с ограниченными ресурсами
техники управления, в числе которых (в дополнение к быстродействию)
рассматривается ограниченность объема памяти и разрядности цифровых управляющих систем.
Опишем (на содержательном уровне) существо эффектов, вносимых
в ДСУ временными задержками в цепях сбора и обработки информации.
При решении каждой из перечисленных выше задач создания ДСУ в отдельности может возникнуть очевидное (на первый взгляд) предположение, что, чем больше информации о состоянии объекта управления используется в задаче синтеза алгоритма управления и чем выше точность
модели (т. е., чем подробнее учитывается информационный образ объекта), тем лучшие значения показателей качества управления будут достигнуты. Однако это предположение базируется на негласном допущении об
отсутствии ограничений по быстродействию, объему памяти и точности
вычислений технических средств. На практике такое предположение может оказаться неверным: временные задержки, вносимые в систему управления процессами сбора и обработки информации, могут ухудшить показатели качества САУ по сравнению с показателями, достижимыми в системах
с менее точным информационным образом [6, 32, 33, 54, 59].
Применительно к ДСУ отсутствие учета ограниченных ресурсов технических средств может привести не только к ухудшению качества управления,
но и к потере физической реализуемости: дискрета времени может оказаться
недостаточной для осуществления совокупности операций по информационному обеспечению, расчету и реализации управляющих воздействий.
Поэтому при создании системы управления необходимо все перечисленные задачи и ряд других задач проектирования решать в совокупности
14
с учетом ограниченности параметров технических средств. Примеры решения задач проектирования с учетом быстродействия элементов комплекса технических средств, количества информации для обмена между объектом управления и управляющим устройством, структуры управляющей системы, вычислительной сложности алгоритма управления на значения запаздывания и интервала дискретизации приведены в [6, 14], с учетом
запаздывания в [29, 68], транспортного запаздывания в [4, 22].
Далее, в последующих главах, ограниченность ресурсов технических
средств САУ исследуется в следующих аспектах:
1. С позиций анализа САУ: оценка потерь качества, вызванных временными задержками в процессах сбора информации, расчета управлений и выдачи их на объект (по сравнению с показателями, рассчитанными
без учета этих задержек). Результаты, полученные в этом направлении
[32, 54, 56, 57, 58], позволяют получить более реалистичные оценки качества САУ, закладываемые в технических заданиях на проектирование и,
возможно, повлиять на выбор комплекса технических средств.
2. С позиций синтеза САУ: определение границ, внутри которых
усложнение информационного образа объекта целесообразно, т. е. позволяет улучшить качество управления. Исследования, выполненные в данном
направлении, приводят к определенному конструктивному пересмотру
подходов к оптимизации процессов управления: удается рассчитать оценку
сложности информационного образа [51], согласующуюся с возможностями конкретных технических средств и, благодаря этому, рассчитать потенциально достижимые значения показателей качества в САУ. Эти значения
можно использовать для экспертизы пригодности вариантов САУ с упрощенными информационными образами (примерами таких вариантов являются системы «скалярный вход – скалярный выход» с типовыми регуляторами). Если технические средства имеют скромные ресурсы памяти и
быстродействия (как это имеет место при использовании микропроцессорной техники), то может оказаться, что в САУ с упрощенным информационным образом достигается лучшее качество управления [56, 57, 59].
3. С позиций выбора структуры управления: количественное различение алгоритмов, математически эквивалентных, но различных по форме организации процессов сбора информации и расчета управляющих
воздействий.
1.2. Общая характеристика систем управления с информационным
запаздыванием
Информационным запаздыванием (), согласно [46], называют интервал времени между началом очередного сеанса сбора данных, необходимых
для принятия решения, и окончанием процесса реализации управляющего
15
воздействия. В отличие от транспортного и/или емкостного запаздывания,
присущего объекту управления, информационное запаздывание (ИЗ) вносится в систему техническими и/или программными средствами и поэтому
зависит как от технических характеристик управляющей системы, так и от ее
организации (в частности, от структуры, способов сбора данных, вычислительной схемы реализации алгоритмов управления).
Информационное запаздывание органично присуще только замкнутым системам управления, показатели качества которых зависят не
только от точности контроля состояния объекта и вида алгоритма, но и от
своевременности выдачи управляющих воздействий на объект. Задержки
в канале управления, вызванные информационными и вычислительными
операциями, могут привести к неправильным, запаздывающим и даже
противоположным реакциям системы на внешние факторы (при некоторых задержках качество управления может оказаться даже хуже, чем в
разомкнутой САУ, если запаздывающие управляющие воздействия будут
находиться в противофазе необходимым воздействиям, например, при
периодическом задающем воздействии).
Информационное запаздывание может быть связано:
с вычислительными затратами на выработку управляющих воздействий (имеющими место, например, при выполнении громоздких матричных операций в ходе расчета управляющих воздействий на цифровых
устройствах с низким быстродействием, малой памятью и разрядностью).
Такое информационное запаздывание будем называть вычислительным,
или алгоритмическим (выч);
с особенностями канала передачи результатов измерения переменных состояния и/или значений выхода объекта к управляющему устройству (например, из-за ограниченной разрядности информационного канала или ограниченной разрядности, памяти и быстродействия аналогоцифрового преобразователя в ДСУ, или из-за особенностей организации
процесса передачи информации). Такое ИЗ будем называть запаздыванием передачи в канале «объект-регулятор» (ОР);
с особенностями канала передачи воздействий от управляющего
устройства к объекту (например, из-за ограниченной разрядности информационного канала или ограниченной разрядности, памяти и быстродействия цифро-аналогового преобразователя в ДСУ, или из-за организации процесса передачи информации). Такое ИЗ будем называть запаздыванием передачи в канале «регулятор-объект» (РО).
Приведем несколько примеров, иллюстрирующих различные формы
информационного запаздывания.
Влияние вычислительного запаздывания чаще всего проявляется в
дискретно-непрерывных системах (т. е. таких, в которых для объекта с
16
непрерывными во времени характеристиками используются дискретные
во времени управляющие воздействия) при использовании алгоритмов
управления, объем расчетов в которых зависит от размерности модели
объекта. К таким алгоритмам приводят методы синтеза оптимальных систем, основанные на идеях математического программирования (примером является метод аналитического конструирования оптимальных регуляторов (АКОР) [29, 36, 40, 49, 50, 60], рассмотренный более подробно в
главе 2). В важных для практики случаях (в частности, в задачах дискретного управления непрерывным объектом с транспортным запаздыванием) размерность дискретной модели непрерывного объекта, используемой для синтеза алгоритма и определяющей объем вычислений для его
реализации, зависит от значения интервала дискретизации непрерывного
времени. Соответственно из-за роста размерности увеличивается вычислительное запаздывание. Поэтому вместо улучшения качества управления, которое разработчик ожидает получить при уменьшении интервала
дискретизации, может быть достигнут обратный эффект: увеличение
точности информационного образа объекта будет блокировано несвоевременностью реакции САУ на внешние факторы [32, 55]. Данный пример иллюстрирует необходимость моделирования дискретно-непрерывных САУ для выбора интервала дискретизации, согласованного с ресурсами техники управления.
Влияние запаздывания передачи в канале «объект-регулятор» (ОР)
проявляется, естественно, при увеличении числа измеряемых переменных. Опишем менее очевидный эффект ограниченности числа разрядов
цифровых устройств информационного канала. Увеличение точности
(при сохранении постоянства разрядности) может быть достигнуто за
счет введения нескольких приборов с различными (перекрывающимися)
пределами измерений для контроля одного и того же сигнала. Как и в
рассмотренном выше примере, эффект увеличения точности цифровых
измерений может быть уничтожен несвоевременностью данных, необходимых для управления. Аналогичное влияние имеет ограниченность разрядной сетки на запаздывание передачи в канале «регулятор-объект»
(РО). Вопросы связи ограниченности разрядной сетки с информационным запаздыванием рассмотрены также в главе 2.
Подчеркнем, что все виды информационного запаздывания зависят
также от структуры и организации процессов сбора данных и вычислений. Один и тот же алгоритм, организованный по-разному, может вызвать различные временные задержки в системе и, соответственно, привести к различным показателям качества управления [50, 54]. Проблемы
рациональной организации расчетов в последние годы приобрели особую
актуальность в связи с реализацией идей параллельных и распределенных вычислений. Представляет интерес создание методики для количе17
ственного сопоставления различных вариантов организации структур и
алгоритмов, недостаточно разработанной применительно к замкнутым
системам управления. Этому кругу вопросов посвящена глава 4.
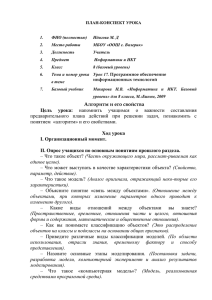
Компонентная модель замкнутой дискретной системы управления
динамическими объектами с информационным запаздыванием представлена на рис. 1.
Реализуемое управляющее
воздействие u[s – 2] с
запаздыванием 2
2
Возмущающее
воздействие F[s]
Переменные состояния
ОБЪЕКТ
объекта x[s]
УПРАВЛЕНИЯ
Помеха измерению h1[s]
Ограничение на величину
управляющего воздействия
Помеха выдачи
управления h2[s]
Задающее воздействие x*[s]
Расчетное управляющее воздействие
РЕГУЛЯТОР
ОР
Рассогласование
x*[s-ОР] – x[s- ОР]
с запаздыванием ОР
Рис. 1. Структурная компонентная схема дискретной замкнутой системы управления по переменным состояния объекта с информационным запаздыванием.
На рис. 1 ОР является запаздыванием передачи в канале «объектрегулятор» (вносится техническими средствами канала передачи информации), а 2 представляет собой сумму вычислительного запаздывания выч (вносится алгоритмом вычисления управляющих воздействий и вычислительными
средствами) и запаздывания передачи в канале «регулятор-объект» РО (вносится техническими средствами канала передачи информации).
Поскольку информационное запаздывание ухудшает качество
управления, необходимы способы его уменьшения. В этом направлении
существуют два подхода. Первый (экстенсивный) заключается в создании более совершенной технической базы: более быстрых вычислительных средств с большими объемами памяти, более мощных каналов передачи информации, но это требует и больших финансовых затрат. В данной работе этот подход не рассматривается. Второй (интенсивный) подход подразумевает поиск эффективной организации информационного
обеспечения и алгоритмов вычисления, синтез систем управления с учетом информационного запаздывания и проведение имитационного моделирования разрабатываемой системы управления, синтезированной без
учета информационного запаздывания. Этот подход (принятый ниже в
18
качестве рабочего) не только более экономичен, но и позволяет получить
конструктивные теоретические результаты, пригодные для использования при проектировании систем управления.
Известно, что все виды запаздывания (в том числе и информационное) приводят к резкому усложнению аналитических расчетов, необходимых для анализа и синтеза замкнутых САУ. Поэтому в данной работе
основным аппаратом исследования выбрано имитационное моделирование. Вычислительные эксперименты, методика проведения и результаты
которых подробно описаны в главе 3, выполнены на специально разработанных для этих целей программных средствах; перейдем к их описанию.
1.3. Обзор задач и средств имитационного моделирования САУ.
Выбор языка программирования для имитационного моделирования
САУ с информационным запаздыванием
Методы имитационного моделирования (ИМ) на ЭВМ находят широкое применение при исследовании дискретных систем управления
(ДСУ) и процессов, в них протекающих [19, 26, 54, 56, 57, 59, 60]. Это
объясняется тем, что строгие аналитические методы (в частности, оптимизационные [1, 8, 19, 39, 40, 46, 66]) часто оказываются неприменимыми как
из-за высокой размерности, так и (чаще) из-за недостаточной разработанности средств синтеза САУ применительно к конкретной задаче (со своими
показателями качества, наличием нескольких критериев, нелинейностями,
ограничениями-неравенствами, которые могут быть настолько своеобразными, что существующий аппарат синтеза окажется неподходящим).
Проведение исследований с помощью имитационных моделей позволяет [19, 26, 54, 56, 57, 60]:
1. На этапе разработки технического задания на проектирование
САУ – выработать обоснованные требования к показателям качества создаваемой САУ на основе моделирования ее работы в различных (в том
числе неблагоприятных) условиях.
2. Провести исследование и сопоставление различных стратегий и алгоритмов управления, исследовать их чувствительность к внешним воздействиям и дрейфу параметров объекта, оценить робастность САУ.
3. Проектировать ДСУ для непрерывных и дискретных процессов с учетом ограничений, свойственных техническим средствам.
4. Прогнозировать и планировать функционирование, развитие и модифицирование системы в будущем с учетом рисков.
5. Обучать и тренировать управленческий персонал работе и обслуживанию системы управления.
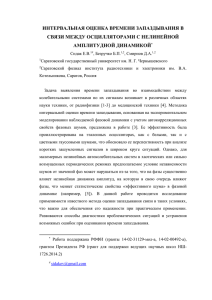
Этапы проведения имитационного эксперимента (рис. 2) [19] достаточно хорошо описаны в литературе по имитационному моделированию
19
и имитационным языкам, например в [13, 28, 35, 38, 48].
Формулировка проблемы и целей имитационного эксперимента
Обработка результатов экспериментов
Определение релевантных ресурсов и законов
функционирования моделируемой системы
Проведение
имитационных
экспериментов
Формализация
моделируемой
системы
Программирование
имитационной
модели
Получение
исходных данных
Планирование
имитационных
экспериментов
Интерпретация полученных данных
Рис. 2. Этапы имитационного моделирования.
Имитационное моделирование является методом достаточно эффективным, но не лишенным недостатков. Трудности и проблемы использования имитационных моделей связаны с обеспечением адекватности описания системы, интерпретацией полученных результатов исследований,
обеспечением стохастической сходимости процесса моделирования, решением проблемы размерности и т. п. К проблемам применения имитационных моделей следует отнести также и большую трудоемкость данного метода.
Для построения имитационных моделей с помощью ЭВМ используется несколько подходов (различающихся, прежде всего, по квалификации, возможностям и функциям исследователя, а также по организации
создания и использования имитационной модели):
Создание имитационных моделей на универсальном языке программирования (Форт, Паскаль, Модула, Ада, C++, Java и др.). Данный
способ наиболее трудоемок, но обладает самой большой гибкостью и неограниченными возможностями.
Использование универсальных пакетов прикладных программ для
математических расчетов и моделирования (в первую очередь, Matlab с
Robust Control, Control System Toolboxes и Simulink [12, 17, 37], а также
MathCAD с надстройкой MathConnex [16, 34, 45] и пакет Maple [11, 15,
85]). Данные средства хороши для решения разовых исследовательских
задач, однако проведению экспериментов с большим количеством вариантов и сочетаний исходных данных препятствует относительно низкое
их быстродействие. Кроме того, для некоторых задач и для реализации
удобного интерфейса все равно приходится использовать средства программирования.
Использование языка имитационного моделирования (MODSIM
20
III, SIMULA 67, Sim ++, С++ Sim, Simex). Языки моделирования обладают
двумя наиболее важными достоинствами – удобством и быстротой программирования и концептуальной выразительностью. Однако они обеспечивают меньше возможностей по сравнению с универсальными языками. В настоящее время в мире разработано и используется более семисот
таких языков [13, 28, 38].
Создание имитационной модели с помощью проблемно ориентированных систем и средств имитационного моделирования. Эти системы,
как правило, не требуют от пользователя знания программирования, но
позволяют моделировать лишь относительно узкие классы сложных систем. Имитационная модель генерируется самой системой в процессе
диалога с пользователем, что позволяет сделать ее написание быстрым,
эффективным и избежать многих ошибок программирования. Таких систем насчитывается несколько десятков (ПОДСИМ, АСИМПТОТА, Simnon, Powersim, Ithink, ProModel, ReThink) [35, 44, 48].
При рассмотрении инструментальных средств ИМ можно обнаружить противоречие между универсальностью (широтой класса моделируемых систем с помощью данного средства) и гибкостью (легкостью описания конкретной системы). Это означает, что если средство может быть
использовано для моделирования широкого класса систем, то язык описания, как правило, сложен и неудобен для описания конкретной системы, – и наоборот.
Нерешенной проблемой остается и присутствие в процессе имитационного моделирования творческого, неформального этапа перевода
поставленной задачи на язык математики. Этот сложный этап в подавляющем большинстве средств моделирования не может быть решен ни
программистом, ни аналитиком самостоятельно. Требуется либо работа
нескольких человек различной квалификации, либо аналитик должен
владеть еще и навыками хорошего программиста.
Поскольку рассматриваемая в данной работе задача исследования
САУ с информационным запаздыванием не охвачена стандартными
средствами моделирования, имеющимися в рассмотренных и проанализированных пакетах прикладных программ, оказалось необходимым либо
программировать новые процедуры в средах этих пакетов, либо создавать
программный комплекс самостоятельно, ориентируясь на использование
универсальных языков. Технически оба подхода сопоставимы по сложности, однако, если принять во внимание перспективы использования
программного комплекса в организациях, проектирующих САУ, то второй вариант окажется предпочтительнее и экономичнее (поскольку не
будет зависеть от наличия или необходимости приобретения дорогих зарубежных пакетов программ). Данные соображения определили и выбор
языков программирования Visual Basic и Java, которые при широких
21
функциональных возможностях обладают развитыми средствами автоматизации программирования и проектирования на основе объектноориентированного подхода, имеют массовое распространение и высокую
степень независимости от платформы (язык Java). Кроме того, язык Java
позволяет наиболее просто реализовать концепции распределенных вычислений в системах управления, рассматриваемых в главе 4, поскольку
на его основе разработан целый ряд вспомогательных технологий.
1.4. Общая структура и функции программного комплекса для
исследования САУ с информационным запаздыванием
Реальный объект управления
2
Классы внешних
возмущений и задающих воздействий
(технологический процесс)
Банк алгоритмов
управления
Процесс
идентификации
1
Исходные параметры модели
ИМИТАЦИОННАЯ МОДЕЛЬ
СИСТЕМЫ УПРАВЛЕНИЯ
МОДЕЛЬ ОБЪЕКТА
УПРАВЛЕНИЯ
1
2
Банк структур систем управления
ИМИТАЦИОННОЕ
МОДЕЛИРОВАНИЕ
МОДЕЛИ КАНАЛОВ
ДАННЫХ
Анализ результатов и
выработка
рекомендаций
МОДЕЛЬ
РЕГУЛЯТОРА
Классы
объектов
управления
Система показателей качества
управления
Рекомендации по выбору
технических средств, алгоритмического и информационного обеспечения ЦСУ
Система вычислительных экспериментов
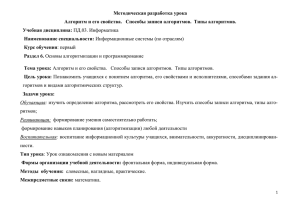
Рис. 3. Функциональная блок-схема программного комплекса
для исследования цифровых систем с информационным запаздыванием.
22
Ниже приведено описание блок-схемы и описаны функции разработанных программных средств, позволяющих развить подходы к исследованию систем с информационным запаздыванием в направлении более
подробного учета ограниченности ресурсов цифровых средств обработки
информации и управления: в дополнение к быстродействию, [4, 6, 14, 44,
68], учитывается ограниченность объема памяти и разрядной сетки цифровой техники.
Функции программного комплекса, реализованного средствами
языков Visual Basic и Java (рис. 3), позволяют исследовать системы с информационным запаздыванием в следующих направлениях:
1. Анализ САУ: оценка потерь качества, вызванных временными задержками в процессах сбора информации, расчета управлений и выдачи
их на объект (по сравнению с показателями, рассчитанными без учета
этих задержек).
2. Синтез САУ: определение границ, внутри которых усложнение
информационного образа объекта целесообразно (позволяет улучшить
качество управления).
3. Выбор структуры управления: количественное различение алгоритмов, математически эквивалентных, но различных по форме организации
процессов сбора информации и расчета управляющих воздействий.
Элементы структуры программного комплекса (см. рис. 3):
1. Расширяемая система показателей качества и характеристик
ДСУ (подробно описана в п. 2.2). Здесь отметим только, что система показателей разделена на две группы. Первая характеризует совокупность
технических характеристик алгоритма (быстродействие алгоритма; требования к объему памяти и к разрядности технических средств). Вторая
группа предназначена для вычисления традиционных показателей качества управления в динамике и статике (перерегулирование; время переходного процесса; характеристики качества достижения конечной цели и
«цены» управления).
2. «Генератор» дискретных моделей объекта, ориентированных на
использование в ДСУ. Для получения сопоставимых результатов, которые позволяют проследить влияние усложнения описания процесса в
объекте на информационное запаздывание и (через него) на качество
управления, будем считать, что множество дискретных моделей порождается одной и той же исходной линейной непрерывной моделью в состояниях [2, 3, 46, 49], размерность которой задается как параметр. Элементом этого множества является дискретная модель с конкретным значением интервала дискретизации непрерывного времени. Для того, чтобы
использовать аппарат пространства состояний применительно к дискретной модели с информационным запаздыванием, размерность вектора со23
стояния должна быть соответствующим образом расширена, причем количество дополнительно вводимых компонент этого вектора зависит как
от величины информационного запаздывания, так и от интервала дискретизации непрерывного времени (подробнее способ генерации дискретных
моделей описан в п. 2.3). Такой подход позволит проследить «конкуренцию» между уточнением модели (связанным с уменьшением интервала
дискретизации) и ухудшением своевременности выдачи управляющих
воздействий на объект (связанным с ростом вычислительной сложности
алгоритмов обработки информации и управления, приводящим к увеличению информационного запаздывания).
3. Совокупность сервисных средств для задания помех в каналах передачи данных от объекта к регулятору и от регулятора к объекту, размерности и параметров объекта управления, возмущающих и задающих
воздействий (подробнее описаны в п. 2.3).
4. Доступная для пополнения библиотека алгоритмов с предоставляемым пользователю базовым набором, включающим: «стандартный»
пропорционально-интегрально-дифференциальный (ПИД) – закон управления, различные варианты алгоритмов настройки его параметров в реальном времени; варианты реализации алгоритма АКОР (подробнее описаны в п. 2.3 и главе 4).
5. Базовые схемы вычислительных экспериментов (с возможностью
их пополнения), в которых представляются методики, позволяющие: исследовать влияние размерности задачи управления на величину информационного запаздывания; строить зависимости показателей качества от
информационного запаздывания как от параметра; определять порог
уточнения модели объекта и усложнения алгоритма управления, превышение которого приводит к ухудшению показателей качества из-за потери своевременности управляющих воздействий; сопоставлять различные
варианты вычислительной и информационной организации алгоритмов
сбора информации и управления, предлагать и испытывать новые варианты; оценивать предельную размерность задачи управления, превышение которой приведет к потере преимуществ оптимизационных алгоритмов перед менее совершенными, но гораздо более быстродействующими
линейными ПИД-законами управления. Описанию вычислительных экспериментов посвящена глава 3.
1.5. Выводы
1. Поставлена задача исследования САУ с учетом информационного
запаздывания, вносимого в систему техническими средствами сбора информации, ее обработки, расчета и реализации управляющих воздействий. Обоснована необходимость учета быстродействия, объема памяти
24
и разрядности цифровых технических средств реализации алгоритмов
управления. Выявлены новые свойства САУ с ИЗ, проявляющиеся в
наличии конкуренции между уточнением моделей объекта и алгоритмов,
ведущим к улучшению качества управления, и ухудшением своевременности управляющих воздействий из-за затрат ресурсов цифровых
устройств на реализацию алгоритмов, снижающим качество управления.
2. Сформулированы принципы учета ограниченности ресурсов техники управления (быстродействия, памяти, разрядности) при решении задачи
проектирования цифровых систем управления. Предложена методика исследования САУ с ИЗ с использованием имитационного моделирования.
Разработана структура обеспечивающих компонентов программного комплекса, позволяющего проводить вычислительные эксперименты по исследованию влияния ИЗ на качество управления.
25
2. МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ ЗАДАЧ
ИССЛЕДОВАНИЯ ВЛИЯНИЯ ИНФОРМАЦИОННОГО
ЗАПАЗДЫВАНИЯ НА КАЧЕСТВО УПРАВЛЕНИЯ
ДИСКРЕТНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ
2.1. Модели объекта управления и каналов передачи данных
в программном комплексе для исследования САУ
с информационным запаздыванием
2.1.1. Модель объекта управления
Как отмечено в главе 1, будем считать, что множество дискретных моделей объекта порождается одной и той же исходной линейной непрерывной
моделью в состояниях [3, 46, 49], размерность которой задается как параметр. Элементом этого множества является дискретная модель с конкретным
значением интервала дискретизации непрерывного времени. Уравнение исходной непрерывной модели выбрано в следующей форме [44, 49]
dx(t )
(2.1)
Aн x(t нОР ) Bн u (t н 2 ) Fн (t ), t T0 , x(T0 ) x0 ,
dt
где t – непрерывное время; T0 – начальный момент времени; x(t) – вектор переменных состояний объекта управления, имеет размерность n1, n –
число состояний, причем x0 – вектор заданных начальных условий в некоторый момент времени T0; u(t) – вектор управляющих воздействий, имеет
размерность r1, r – число управляющих воздействий; Aн – матрица размерности nn (возможно, ее параметры зависят от времени), определяющая параметры объекта управления в непрерывном времени; Bн – матрица размерности nr (возможно, ее параметры зависят от времени), определяющая параметры канала выдачи управляющих воздействий на объект в непрерывном времени; Fн(t) – вектор возмущающих воздействий в
непрерывном времени размерности n1; нОР – интервал времени информационного запаздывания в канале «объект-регулятор»; н2 – сумма интервалов времени информационного запаздывания в канале «регулятор-объект» и
вычислительного запаздывания: н2 = нРО + нвыч.
Путем применения полинома Лагранжа-Сильвестра можно получить
множество порожденных дискретных моделей объекта, параметры которых определяются как параметрами исходной непрерывной модели, так и
значением интервала дискретизации непрерывного времени. Свойством
таких моделей является совпадение временных характеристик с характеристиками порождающей непрерывной модели (2.1) в точках дискретного отсчета времени:
A e Aнt , B Aн1 e Aн t E Bн , F Aн1 e Aнt E Fн ,
26
Aн j E
n
n
e Aнt e i t
i 1
j 1, j i
n
i j
,
j 1, j i
(2.2)
x[ s ] A[ s 1]x[ s 1 ОР ] B[ s 1]u[ s 1 2 ] F [ s 1],
где s = 0, 1, ..., N – такты дискретного времени, N – заданное число тактов управления; t – интервал дискретизации; i – i-е собственное число
матрицы Ан; A[s] – дискретная матрица, определяющая параметры объекта управления; B[s] – дискретная матрица, определяющая параметры канала выдачи управляющих воздействий на объект; F[s] – случайный вектор в дискретном времени; ОР – информационное запаздывание в канале
передачи значений переменных состояния от объекта управления к регулятору; 2 – сумма вычислительного запаздывания регулирующего устройства и канала передачи данных «регулятор-объект»: 2 = РО + выч.
Поскольку величины 2 и ОР могут быть различными, то возможны
следующие ситуации:
для s < 2 – 1 должны быть заданы начальные условия для управляющих воздействий (обычно принимаются равными нулю, т.е. предполагается, что в период s < 2 – 1 система разомкнута);
для s < ОР – 1 должны быть заданы начальные условия для переменных состояния;
если 2 > ОР, то управляющие воздействия отстают от процесса в
объекте;
если 2 < ОР, то управляющие воздействия опережают процесс в
объекте (управление «вперед»).
Отметим также, что размерность вектора состояния x[s] в (2.2) совпадает с размерностью вектора исходной непрерывной системы, но форма (2.2) не соответствует принятой «марковской» форме дискретных моделей, в которых вся предыстория процесса аккумулируется в состояние
системы на предшествующем такте.
Для применения аппарата теории пространства состояний необходимо придать модели (2.2) марковскую форму. Этой цели служит известный прием расширения размерности пространства состояний [6, 20, 27].
Рассматривая тракт передачи управляющего воздействия на объект как
совокупность задержек на один такт дискретного времени (рис. 4), введем расширенный вектор состояния X[s] следующим образом:
(2.3)
X [ s] T x[ s]T z1[ s]T z 2 [ s]T ... z [ s]T .
1n r
1r
1r
1r
1n
27
Вектор X[s] имеет размерность 1 n r , где
– число такt
тов дискретного времени, укладывающихся на временном интервале,
равном информационному запаздыванию , n – размерность пространства
состояний исходной непрерывной модели, r – размерность вектора
управляющих воздействий, T – знак транспонирования, z1, …, z – дополнительные вектора.
С учетом (2.3) дискретная модель примет форму:
(2.4)
X [s] A X [s 1] B u[s 1] F[s 1],
где матрицы A размерности (n r ) (n r ) и B размерности
(n r ) r имеют следующую структуру:
Ann
A Or ( 1)n
Or n
Bnr
Or ( 1)r
Or r
Onr ( 1)
E r ( 1)r ( 1) ,
Orr ( 1)
O
B n r ( 1)r ,
E r r
где E – единичные матрицы, O – нулевые матрицы.
Возмущающее
воздействие F[s]
u[s]
r1
z[s]
r1
Модель объекта без
информационного
запаздывания
Такт
Такт
Такт
z-1[s]
r1
z1[s]
r1
z2[s]
r1
x[s]
n1
Рис. 4. Расширение размерности пространства состояний для учета
информационного запаздывания.
Прием расширения размерности пространства состояний привлекателен тем, что позволяет без изменений использовать формальный аппарат синтеза, разработанный для систем без запаздывания. «Платой» за
упрощение процедуры синтеза является быстрый рост размерности, особенно при большом числе компонент вектора управляющих воздействий
(рис. 5а, 5б). Так, при запаздывании на 5 тактов, размерности исходного
пространства состояний, равном 4, и размерности вектора управлений,
равной 2, число элементов в матрицах A и B составляет 196 и 28 соответственно (против 16 и 8 в исходном пространстве состояний).
28
Число элементов матриц
700
600
500
A
400
300
200
B
100
0
1
2
3
4
5
6
7
8
9
10
Число тактов запаздывания
Рис. 5а. Зависимость числа элементов в матрицах, определяющих модель объекта в
расширенном пространстве состояний, от величины информационного запаздывания
(число переменных состояний – 4, число управляющих воздействий – 2).
Число элементов матриц
2500
2000
A
1500
1000
B
500
0
1
2
3
4
5
6
7
8
9
10
Число тактов запаздывания
Рис. 5б. Зависимость числа элементов в матрицах, определяющих модель объекта в
расширенном пространстве состояний, от величины информационного запаздывания
(число переменных состояний – 4, число управляющих воздействий– 4).
Как видно из (2.3) и (2.4), размерность расширенного вектора состояния и количество элементов в соответствующих матрицах зависят от
выбора интервала дискретизации непрерывного времени, уменьшение
которого, приводящее к повышению точности описания непрерывного
объекта, традиционно считалось полезным и при синтезе замкнутых
САУ. Поскольку аналитические выражения для оценки потерь точности
из-за дискретизации (особенно при исследовании замкнутых САУ с запаздыванием) чаще всего получаются завышенными, на практике выбор
интервала дискретизации осуществляется эмпирически или путем моде29
лирования с постепенным уменьшением дискреты времени до тех пор,
пока критерий качества управления не перестанет заметно улучшаться.
Учет информационного запаздывания в постановке задачи анализа и
синтеза САУ позволяет внести конструктивные изменения в процесс выбора интервала дискретизации. Неизбежное ухудшение своевременности
управляющих воздействий из-за роста сложности информационного
обеспечения и объема вычислительных операций поставит предел
уменьшению интервала дискретизации, переход за который приведет не к
улучшению, а к ухудшению качества управления. Вычислительные эксперименты, выявляющие экстремальную форму зависимости показателей
качества управления от параметров, определяющих информационное запаздывание, подробно описаны в главе 3. Отметим только, что положение экстремума зависит как от особенностей алгоритмов обработки информации и управления, так и от параметров технических средств.
Пример осуществления процедуры генерации дискретной модели и
расширения размерности пространства состояний приведен в Приложении.
Отметим, что между обычным (транспортным) и информационным
запаздыванием имеются принципиальные различия, проявляющиеся
наиболее характерно при использовании процедуры расширения размерности пространства состояний. Существо различий состоит в том, что величина информационного запаздывания зависит от предположения о
размерности расширенного пространства состояний, а последнее, в свою
очередь, – от предположения о величине информационного запаздывания. Иными словами, задача определения размерности расширенного
пространства состояний математически незамкнута. Ее решение может
быть получено итерационно, но при некоторых сочетаниях параметров
итерационная процедура может расходиться. Поясним это иллюстративным примером. Пусть количество вычислений n, необходимых для расчета алгоритма управления, квадратично зависит от величины информационного запаздывания , а последнее – линейно от количества вычислений. Для обхода незамкнутости задачи «разнесем» эти зависимости по номерам итераций, получим:
n 1 ( ) 2 n0 ;
1 [ n ],
где = 0, …, max – номера итераций, начальные приближения 0 и n0 заданы, (n0 – количество вычислений для случая, когда информационное
запаздывание отсутствует), , , n0 – параметры, характеризующие вычислительную сложность алгоритма, знаком «[ ]» обозначено округление
до ближайшего целого числа сверху. Если эта процедура является сходящейся, то, начиная с некоторого *, можно положить n + 1 = n = n*, + 1
30
= = * и ориентировочно, пренебрегая операцией округления, рассчитать эти стационарные значения. Получим:
n*
1 1 4 2 n0
2 2
*
,
1 1 4 2 n0
2
.
Из данных соотношений следует условие сходимости: 4 2 n0 1 ,
причем максимальное значение оценки информационного запаздывания,
1 .
соответствующее сочетанию параметров 4 2 n0 1, равно
2
На рис. 6а, 6б приведены зависимости, соответствующие сходящемуся и расходящемуся процессам оценивания информационного запаздывания, вызываемого расширением размерности пространства состояний (построены с учетом операции округления).
Число тактов запаздывания
20
16
12
8
4
0
1
4
7
10
13
16
19
22
25
Число итераций
Рис. 6а. Иллюстрации к сходящемуся процессу роста информационного запаздывания при
расширении размерности пространства состояний.
Число тактов запаздывания
75
60
45
30
15
0
1
5
9
13
17
21
25
29
33
Число итераций
Рис. 6б. Иллюстрации к расходящемуся процессу роста информационного запаздывания
при расширении размерности пространства состояний.
31
2.1.2. Модели каналов передачи данных от объекта управления
к управляющему устройству и от управляющего устройства
к объекту управления
Передача информации об объекте управления в регулятор происходит
по каналу передачи данных, который назовем каналом передачи вектора переменных состояния (КПВПС). Для передачи управляющих воздействий от
регулятора на объект управления служит канал передачи данных, который
назовем каналом передачи управляющих воздействий (КПУВ).
КПВПС, как правило, состоит из датчиков, измеряющих значения
переменных состояния объекта управления, аналого-цифровых преобразователей (если объект непрерывный, а система управления дискретная),
устройств передачи данных, вспомогательных устройств (например,
устройства коррекции ошибок передачи или устройства кодирования).
КПУВ также состоит из устройств передачи данных, вспомогательных
устройств и, в отличие от КПВПС, цифро-аналоговых преобразователей
(если объект непрерывный, а система управления дискретная).
Для рассматриваемых ДСУ значения векторов переменных состояния и управляющего воздействия передаются в виде двоичного цифрового кода как наиболее распространенного в цифровой технике управления.
На основе работ по теории передачи цифровой информации [67, 69],
а также работ по цифровой технике передачи информации [24, 44, 69], и
учитывая, что модель системы управления строится с учетом ограниченности быстродействия, памяти и разрядности технических средств, можно указать следующие особенности КПВПС и КПУВ, влияющие на величины информационного запаздывания в каналах передачи данных:
1. КПВПС производит передачу каждого элемента вектора состояния
x[s] в виде k КПВПС, i – разрядной кодовой двоичной комбинации
инф
п
( k КПВПС, i , k КПВПС
), содержащей
,i
инф
п
k КПВПС
, i информационных и k КПВПС, i
проверочных бит, где i = 1, …, n. КПУВ, соответственно, производит передачу элементов вектора управляющих воздействий u[s] в виде k КПУВ , j
инф
п
– разрядной кодовой двоичной комбинации ( k КПУП , j , k КПУВ
, j ), содер-
инф
жащей k КПУВ , j информационных и
п
k КПУВ
, j проверочных бит, где j = 1,
…, r. Оба кода могут быть избыточными (корректирующими, т. е. они
содержат дополнительные биты, число которых равно
КПВПС и
п
k КПУВ
,j
п
k КПВПС
, i > 0 для
> 0 для КПУВ) и безизбыточными (первичными, т. е.
п
не содержащими дополнительных бит k КПВПС
, i = 0 для КПВПС и
32
п
k КПУВ
, j = 0 для КПУВ). Для рассматриваемой модели (см. рис. 1 на стр.
19) и учитываемых параметров технических средств (быстродействие,
память, разрядность) для КПВПС и КПУВ важна максимальная разрядность за один такт, т. е. количество одновременно передаваемых бит.
2. Время передачи вектора состояния ВС и время передачи управляющих воздействий ВУ зависят от способа организации передачи.
Существует последовательный, параллельный, комбинированный (последовательно-параллельный или параллельно-последовательный) способы передачи. Кроме того, время передачи зависит от применяемых методов повышения верности передачи информации (например, метод обнаружения и исправления ошибок избыточными кодами, метод многократной передачи избыточного или безизбыточного кода, метод передачи
с квитированием информации и др.). В общем случае время передачи
вектора состояния ВС можно представить следующей функцией
инф
п
ВС f1 (n, k КПВПС
, k КПВПС
, 1 ),
инф
п
где n – количество переменных состояния; k КПВПС , k КПВПС – общее количество информационных и, соответственно, проверочных бит в векторе
состояния; 1 – число повторений передачи вектора состояний.
Функция времени передачи вектора управляющих воздействий ВУ ,
соответственно, имеет вид
инф
п
ВУ f 2 (r , k КПУВ
, k КПУВ
, 2 ),
п
инф
где r – количество управляющих воздействий; k КПУВ
, k КПУВ – общее количество информационных и, соответственно, проверочных бит в векторе
управляющих воздействий; 2 – число повторений передачи вектора
управления.
Время передачи векторов зависит от их размерности, числа повторений передачи, скорости передачи информационных и проверочных (при
передаче избыточным кодом) бит и их количества, а также пауз между
повторениями передачи (зависят от скорости и режима работы принимающего и передающего устройства). При организации передачи с квитированием ВС и ВУ будут также зависеть от скорости передачи квити-
рующих сигналов и пауз между передачей квитирующих сигналов и информационных бит.
Величины ВС и ВУ могут варьироваться в очень широких пределах (например, если в каналах передачи имеются сильные помехи, то число
повторений передачи (как и общее время) может быть очень велико).
33
Для рассматриваемой модели (см. рис. 1 на стр. 15) и учитываемых параметров технических средств, важна скорость (быстродействие) передачи
данных. Быстродействие КПВПС будет выражаться в числе тактов запаздывания ОР, а КПУВ в числе тактов запаздывания РО.
Если КПВПС успевает передать необходимый вектор переменных
состояния от объекта к регулятору в тот же такт, то ОР = 0, в противном
случае число тактов запаздывания равно ближайшему максимальному
целому значению отношения времени передачи вектора состояния ВС к
интервалу дискретизации t
ВС .
t
ОР max
Для КПУВ, соответственно, РО = 0, если он успевает передать необходимый вектор управляющих воздействий от регулятора к объекту в тот же
такт, иначе число тактов запаздывания равно ближайшему максимальному
целому значению отношения времени передачи вектора
управляющих воздействий ВУ к интервалу дискретизации t
ВУ .
t
РО max
3. Объем памяти КПВПС и КПУВ, так же как и их разрядность, косвенно влияет на скорость передачи данных и зависит, в основном, от памяти аналого-цифрового преобразователя (АЦП) для КПВПС и памяти
цифро-аналогового преобразователя (ЦАП) для КПУВ.
Если преобразователи АЦП и ЦАП могут хранить все передаваемые
значения в памяти, то скорость будет зависеть только от устройств передачи, скорости однократного измерения датчиками величин переменных
состояния для КПВПС (или скорости однократной выдачи величин
управляющих воздействий для КПУВ) и скорости их преобразования в
цифровой код. В противном случае скорость будет зависеть от числа необходимых повторов цепочки «измерение-преобразование-передача».
4. КПВПС и КПУВ передают мгновенные значения переменных состояния и управляющих воздействий соответственно, полученные в дискретные моменты времени [67, 69].
Перечисленные особенности КПВПС и КПУВ учтены в модели,
встроенной в программный комплекс для исследования САУ с информационным запаздыванием следующим образом: имеется возможность задания разрядности в виде общего количества информационных бит
инф
инф
k КПВПС
и k КПУВ , количества бит представления чисел в программном
обеспечении k n , числа повторений передачи 1 и 2, а также времени
34
полной передачи ВС, i и ВУ , j одного набора информационных и проверочных бит с учетом объемов памяти КПВПС и КПУВ, организации
передачи и других особенностей каналов. Параметры n – число переменных состояния и r – число управляющих воздействий задаются в общей
постановке задачи (при формировании модели процесса управления
(2.2)). Таким образом, общее время передачи вектора состояний определяется в программном комплексе как
nk
ВС ВС, i инф n
k
КПВПС
где отношение
n kn
инф
k КПВПС
,
1
вычисляется как максимальное целое число, а
общее время передачи вектора управляющих воздействий определяется как
rk
ВУ ВУ , j инфn 2 ,
k
КПУВ
где отношение r k n вычисляется как максимальное целое число.
инф
k КПУВ
В программном комплексе предусмотрена альтернативная возможность задания величин запаздывания ОР и РО в тактах управления.
Для моделирования помех в КПВПС и в КПУВ в программном
комплексе используется табличное задание величин помех для каждого
такта управления, что не ограничивает проектировщика в выборе функции помех.
2.2. Система показателей качества и вычислительных
характеристик для оценки процесса и алгоритма управления
динамическими объектами
Показатели качества, введенные в теории автоматического управления, относятся, в основном, к определению количественных характеристик статических, динамических и стохастических режимов работы системы. К числу таких традиционно используемых показателей относятся,
например, величины статических и динамических ошибок (в более общем случае – коэффициенты ошибок), перерегулирование, время переходных процессов, характеристики расположения полюсов и нулей передаточной функции и др. [8, 23, 40, 49, 63].
Дополним перечень показателей качества управления так, чтобы получить возможность сопоставлять различные варианты информационного
и алгоритмического обеспечения САУ, оценивая влияние информацион35
ного запаздывания. Тогда вектор I, I = (I1, I2, …, Iq), показателей качества
управления будет содержать (наряду с традиционными характеристиками
достижения цели управления, цены управления и качества различных
режимов) совокупность показателей, характеризующих свойства технических средств и способы организации процессов сбора информации и
расчета управляющих воздействий и определяющих требования к быстродействию, памяти и разрядности цифровых устройств.
ПОКАЗАТЕЛИ КАЧЕСТВА И ХАРАКТЕРИСТИКИ
Характеризующие быстродействие
Характеризующие требования к памяти
Абсолютные
Общий объем памяти;
Число целых значений;
Число дробных значений;
Число значений повышенной точности
Абсолютные
Число тактов микропроцессора
Нормированные и абсолютные
Число операций «сложение»;
Число операций «умножение»;
Число операций «деление»;
Число операций «сравнений»;
Число операций пересылки данных
Характеризующие процесс достижения цели
Абсолютные и нормированные
Значение отклонения переменных
состояний от заданных величин;
Среднеквадратическое отклонение
переменных состояний от задания
Характеризующие требования к разрядности
Абсолютные
Разрядность канала передачи
переменных состояния;
Разрядность канала передачи
управляющих воздействий
Характеризующие достижение цели
Абсолютные и нормированные
Значение отклонения переменных
состояний от заданных величин
Дополнительные
Абсолютные
Характеризующие цену управления
Время переходного процесса
Абсолютные и нормированные
Нормированные и абсолютные
Значение отклонения управляющих
воздействий от заданных величин;
Среднеквадратическое
отклонение
управляющих воздействий от задания
Перерегулирование
Рис. 7. Показатели качества и характеристики системы управления.
Общая классификация показателей качества приведена на рис. 7.
Показатели, традиционно используемые в теории управления, объединены в блоки с названиями: «Характеризующие процесс достижения цели»,
«Характеризующие достижение цели», «Характеризующие цену управления» и «Дополнительные». Остальные показатели введены специально
для учета эффектов, связанных с информационным запаздыванием. От36
метим, что программный комплекс построен так, чтобы состав показателей качества мог быть легко дополнен.
Вновь вводимые показатели качества требуют детального анализа и сопоставления вычислительной сложности алгоритмов путем определения затрат ресурсов цифровой техники на все виды операций, связанных с вычислениями, обмена с памятью, передачей данных по каналам связи объекта с
управляющим устройством. Далее, в п. 2.3, такой анализ будет выполнен для
ряда популярных и нетрадиционных алгоритмов управления.
Опишем введенные показатели качества более детально.
I. Характеристики быстродействия алгоритма управления:
Абсолютные характеристики (ненормированные).
Количество тактов процессора, необходимых для выполнения каждой элементарной операции в алгоритме управления:
(2.5)
I i pi N i , i 1, , 5,
где N1 (N2 … N5) – количество операций типа «сложение» (соответственно «умножение», «деление», «сравнение», «перемещение») в алгоритме
управления; p1 (p2 … p5) – коэффициент сложности операции типа «сложение» («умножение», «деление», «сравнение», «перемещение»), определяется по числу тактов процессора на котором производится операция;
I1 (I2 … I5) – количество тактов процессора, необходимых для выполнения всех операций типа «сложение» (соответственно «умножение», «деление», «сравнение», «перемещение»);
Примечания.
1. В алгоритме управления могут применяться числа, представленные в ЭВМ данными различных типов, элементарные операции с каждым
из которых могут требовать различного числа тактов процессора. Для
упрощения оценки абсолютного количества необходимых тактов (2.5) все
алгоритмы управления считаются реализованными с представлением чисел типом данных, занимающим максимальное количество тактов процессора для выполнения элементарных операций, в связи с чем (2.5) рассматривается как верхняя граница числа тактов процессора, необходимых для реализации алгоритма управления.
2. Скорость операций типа «сравнение» и «перемещение» зависит от
аргументов этих функций (вид сравнения (например, с нулем или другим
числом) или адрес в памяти, куда производится перемещение), поэтому в
качестве коэффициентов p4, p5 выбираются максимальные значения количества тактов на данном процессоре, т. е. оценки I4, I5 трактуются также как верхние границы числа тактов процессора.
3. Несмотря на то, что быстродействие принято измерять в форме соотношения какой-либо величины к периоду времени, применительно к
разработанному комплексу программ приведение предлагаемых характе37
ристик в соответствие с общепринятым показателем нецелесообразно,
поскольку это приведет к потере универсальности комплекса. Приведем
поясняющие аргументы. Для осуществления данной операции необходимо знать время выполнения одного такта процессора. Однако эта величина зависит от частоты работы процессора, его архитектуры, объема кэшпамяти и других характеристик. Кроме того, реальное быстродействие
алгоритма также зависит от промежуточного и системного программного
обеспечения в случае использования универсальной ЭВМ (в частности,
от операционной системы). Для сохранения универсальности рассматриваемой методики оценки алгоритмов управления приведение характеристик быстродействия к стандартному виду не производится. Это легко
может быть сделано инженером-проектировщиком самостоятельно при
использовании программного комплекса для моделирования конкретной
разрабатываемой САУ.
4. Указанные характеристики быстродействия выбирались для обычных универсальных процессоров. Однако, на практике, технические
средства реализации системы управления могут иметь и специализированные процессоры, которые способны, например, выполнять матричные
операции. В этом случае оценка быстродействия может быть произведена
путем сравнения времени выполнения групп элементарных операций
(например, для операции умножения матрицы) на имеющихся технических средствах и времени выполнения этих групп на обычных универсальных процессорах.
Общее количество тактов процессора, необходимых для реализации
алгоритма управления
5
I6 Ii ,
(2.6)
i 1
где I6 – абсолютное количество тактов процессора, необходимых для реализации алгоритма управления.
Относительные (нормированные) характеристики быстродействия
вводятся для параметризации оценки роста вычислительной сложности алгоритма управления. В частности, дополнительным нормирующим параметром может служить размерность объекта управления или число компонент
вектора управляющих воздействий:
I7
I
I
I1
I
I
, I 8 2 , I 9 3 , I10 4 , I11 5 ,
I6
I6
I6
I6
I6
(2.7)
где I7 (аналогично I8, …, I11) – доля операций типа «сложение» (соответственно
«умножение», «деление», «сравнение», «перемещение») в общем количестве
тактов процессора, необходимых для реализации алгоритма управления.
38
Примечание. Относительные характеристики быстродействия рассматриваются для оценки роста вычислительной сложности (уменьшения быстродействия) алгоритма управления в зависимости от параметров системы
управления (например, в зависимости от размерности объекта управления
или от числа управляющих воздействий).
II. Характеристики алгоритма управления с точки зрения требований
к объему памяти.
Абсолютные характеристики.
Максимальное количество целых (I12), действительных (I13) и повышенной точности (I14) чисел, которые необходимо одновременно хранить в
памяти.
Объем памяти, который необходим для реализации алгоритма управления
(2.8)
I15 g1 I12 g 2 I13 g 3 I14 ,
где g1 (g2, g3) – количество бит, необходимых для представления целых чи
сел (соответственно – действительных чисел и чисел повышенной точности).
Относительные характеристики (определяют долю памяти, отводимую для хранения данных каждого типа):
g I
g I
gI
(2.9)
I16 1 12 , I17 2 13 , I18 3 14 ,
I15
I15
I15
где I16 (I17, I18) – доля целых (соответственно – действительных и повышенной точности) чисел в общем объеме памяти.
Примечание. Относительные характеристики требований к объему
памяти рассматриваются для оценки роста вычислительной сложности
алгоритма управления в зависимости от параметров системы управления
(например, в зависимости от размерности объекта управления или от
числа управляющих воздействий).
III. Характеристики алгоритма управления с точки зрения требований
к разрядности технических средств управления.
В этой группе характеристик рассматриваются две – минимальная
разрядность технических средств канала передачи данных от объекта
управления к регулятору (I19) и минимальная разрядность технических
средств канала передачи данных от регулятора к объекту управления (I20).
Приведем также результаты систематизации показателей качества
управления, введенных в работах по теории управления [40, 49, 63].
1. Показатели, характеризующие качество достижения конечной цели управления (характеризуют отклонение вектора переменных состояний на последнем такте управления x[N] от заданных значений на данном
такте x*[N]):
Абсолютные показатели (ненормированные):
(2.10)
q i xi [ N ] xi* [ N ] , i 1, , n, I 21 max q i .
i
39
Относительные показатели (нормированные):
qi
, если x * [ N ] 0, i 1, ..., n,
(2.11)
I 22, i xi* [ N ]
q , иначе.
i
2. Показатели, характеризующие качество процесса (траектории) достижения цели, т. е. значение x[s] и отклонений (x[s] – x*[s]) при
s = 1, ... , N – 1. При этом не включается нулевой такт, так как начальные
условия считаются заданными (от управляющих воздействий не зависят):
Абсолютные (ненормированные) показатели (нужны для проверки
соответствия состояний x[s] технологическим ограничениям x[s], x[s] ):
I 23, i maxxi [ s ], I 23, i min xi [ s ],
s
s
s 1, ..., N 1, i 1, ..., n .
(2.12)
Нормированные показатели – среднеквадратическое отклонение
(СКО) от задания
qi ,CKO
2
1 N 1
xi [ s ] xi* [ s ] , i 1, ..., n,
N 1 s 1
(2.13)
qi ,CKO
, если max xi* [ s ] 0,
max x * [ s ]
s
(2.14)
I 24, i
i
s
qi ,CKO , иначе, s 1, ..., N 1, i 1, ..., n.
Формула (2.13) представляет абсолютное значение СКО, а (2.14)
нормированный показатель качества к абсолютно максимальному значению переменной состояния. Данный показатель эффективен для систем
автоматической стабилизации (в которых задающие воздействия изменяются настолько редко, что в промежутках между изменениями имеют
место длительные интервалы статического режима). Однако, при часто
изменяющихся задающих воздействиях необходим показатель качества,
характеризующий максимальное (за весь период работы системы)
мгновенное отклонение вектора состояния от заданного значения:
qi ,CKO
, если xi* [ s] 0,
max *
s x [ s]
(2.15)
I 25, i
i
max qi ,CKO , иначе, s 1, ..., N 1, i 1, ..., n.
s
Максимальные (за период работы САУ) абсолютные (см. 2.16) и относительные (см. 2.17 и 2.18) значения отклонений компонент вектора
состояния от заданных значений:
40
I 27, i
(2.16)
qi , max max xi [ s] xi* [ s] , i 1, ..., n, ,
s1, N 1
qi , max
, если xi*[ s ] 0,
max x*[ s ]
(2.17)
I 26, i
i
s
qi , max , иначе, i 1, ..., n.
qi ,max
max *
, если xi* [ s] 0,
s x [ s]
(2.18)
i
max qi ,max , иначе, i 1, ..., n, s 1, ..., N 1.
s
Формула (2.17) нормирует отклонение (с учетом его знака) максимальным значением задающего воздействия. В (2.18) знак отклонения не
учитывается, а нормировка производится текущим значением задающего
воздействия.
3. Показатели, характеризующие «цену» управления, т. е. величину
отклонения управляющих воздействий от номинальных значений:
Абсолютные (ненормированные) показатели (нужны для проверки
соответствия расчетных управлений технологическим границам Umax и Umin):
I 28, j max u j [ s ] ,
s[ 0, N 1]
I 29, j min
u j [s],
s[ 0, N 1]
j 1, ..., r.
(2.19)
Относительные показатели (аналогичны по форме показателям
качества достижения цели):
qu j ,CKO
2
1 N 1
u j [ s ] u *j [ s ] , j 1, ..., r ,
N 1 s 1
(2.20)
qu j ,CKO
, если max u *j [ s] 0,
max u * [ s ]
s
(2.21)
I 30, j
j
s
qu j , CKO , иначе, j 1, ..., r , s 1, ..., N 1,
qu j ,CKO
max
, если u *j [ s ] 0,
*
s
(2.22)
u j [s]
I 31, j
max qu j ,CKO , иначе, j 1, ..., r , s 1, ..., N 1,
s
qu j ,max max
u [s] u [s] ,
s[1, N 1]
j
41
*
j
j 1, ..., r ,
(2.23)
I 32, j
qu j ,max
, если u *j [ s] 0,
max u * [ s]
j
s
qu j ,max , иначе, j 1, ..., r ,
(2.24)
qu
max j ,max , если u *j [ s ] 0,
s u * [s]
(2.25)
I 33, j
j
max qu j ,max , иначе, j 1, ..., r , s 1, ..., N 1.
s
4. Дополнительные показатели качества:
Перерегулирование (оценивается по величине максимального отклонения переменной состояния от задания после первого пересечения траекторий переменной состояния и задающего воздействия):
*
(2.26)
qilim
, max max xi [ s ] xi [ s ] , i 1, ..., n,
sSt , N
где St – такт первого пересечения траектории переменной состояния xi[s]
и траектории задающего воздействия xi* [ s ] .
Формула нахождения величины перерегулирования на основе значения максимального отклонения переменной состояния
qilim
, max
, если S t существует, i 1, ..., n,
(2.27)
I 34, i xi* [ s max ]
нет, иначе.
где smax – такт максимального значения отклонения переменной состояния xi[s] от задающего воздействия xi* [ s ] .
Время переходного процесса. Формула нахождения времени переходного процесса имеет вид
(2.28)
I 35, i S p , i t , i 1, ..., n,
где Sp,i – такт, с которого условие xi [ s] xi* [ s] , s 1, ..., N , i 1, ..., n
всегда выполняется, – половина величины трубки статики.
2.3. Библиотека алгоритмов управления дискретными
динамическими процессами и оценка информационного запаздывания,
вносимого их реализацией
Программный комплекс для проведения вычислительных экспериментов с моделями САУ с ИЗ, структура которого показана на рис. 3 (см.
42
стр. 25), содержит легко дополняемую библиотеку различных вычислительных реализаций ряда алгоритмов. Поскольку охватить все варианты
алгоритмов в рамках одной работы невозможно, ниже рассматриваются
лишь два класса алгоритмов, свойства которых с позиций учета ИЗ полярны. К первому классу отнесены инженерные алгоритмы, характерным
свойством которых является сравнительно невысокая точность при высокой своевременности выдачи управляющих воздействий. В качестве
примера алгоритмов данного класса исследуется дискретный вариант
пропорционально-интегрально-дифференциального закона управления.
Ко второму классу отнесены алгоритмы, синтезированные исходя из
строгих оптимизационных постановок; характерным свойством таких алгоритмов является (наоборот, по отношению к первому классу) высокая
точность при сравнительно невысокой своевременности выдачи управляющих воздействий. В качестве примера алгоритмов данного класса исследуются законы управления, синтезированные методами аналитического конструирования оптимальных регуляторов (АКОР). На примере исследования этих классов алгоритмов удается экспериментально подтвердить качественные эффекты, связанные с ИЗ, и проследить за этапами
конкурирования между точностью и своевременностью управления по
мере усложнения модели объекта.
В частности, в описываемой версии в библиотеке представлены:
1. Дискретный вариант пропорционально-интегрально-дифференциального (ПИД) алгоритма как наиболее популярного в промышленных
САУ непрерывными инерционными технологическими объектами [8, 24,
43, 44, 46]. Поскольку вычислительная сложность данного алгоритма очень
невелика, величиной информационного запаздывания, вносимого его реализацией, почти во всех случаях можно пренебречь. Данный алгоритм используется в вычислительных экспериментах в двух направлениях. Вопервых, сопоставление показателей качества управления, достижимых при
его использовании, с соответствующими показателями, достижимыми при
использовании более совершенных алгоритмов, позволяет обоснованно
принять или отказаться от ПИД-алгоритма на этапе проектирования САУ.
Во-вторых, показатели качества, соответствующие САУ с ПИДалгоритмом, используются для определения области эффективного использования совершенных, но вычислительно сложных алгоритмов. Как
уже отмечалось, такие алгоритмы могут оказаться хуже, чем ПИДалгоритм, из-за несвоевременности реакций на внешние факторы. Общеизвестные формулы ПИД-алгоритма приведены в п. 2.3.6.
2. Два варианта реализации алгоритмов автоматической настройки
(адаптации) параметров ПИД-алгоритма: с помощью прямого поиска экстремума критерия Хука-Дживса [39, 61, 65] и с помощью направленного
автоматического перебора, осуществляемого генетическими алгоритмами
43
[25, 80, 84, 88, 91]. Применение обоих вариантов для целей настройки параметров САУ имеет новизну; подробно эти алгоритмы описаны в п. 2.3.6
и главе 4 данной работы.
3. Два варианта алгоритма, синтезированного методами АКОР, [2, 6,
22, 36, 49, 50, 60] как альтернатива ПИД-алгоритму: в классической постановке задачи алгоритм АКОР обеспечивает более высокое качество
управления, чем ПИД-алгоритм (правда, количественная мера этого
улучшения может быть выяснена только при моделировании), но с учетом ИЗ это заключение не всегда будет иметь место. Первый вариант
АКОР-алгоритма синтезируется без учета информационного запаздывания, но моделируется с ИЗ (при этом свойства АКОР-алгоритма утрачиваются). Второй вариант соответствует АКОР-алгоритму, на этапе синтеза которого учтено ИЗ (при этом синтезированный алгоритм, сохраняя
свойства, описанные в работах по АКОР [6, 36, 49, 50, 60], имеет большее
ИЗ, в связи с чем результат его сравнения с первым вариантом без моделирования неясен). Хотя АКОР-алгоритмы достаточно подробно описаны
[6, 22, 36, 49, 54], ниже приводится сводка всех необходимых формул с
обобщениями, связанными с учетом внешних возмущений и задающих
воздействий. Это сделано с целью расчета характеристик вычислительной сложности алгоритмов I1,…I20, введенных в п. 2.2. Сводка результатов анализа вычислительной сложности приведена в табл. 1 (на стр. 53)
данного параграфа.
4. Два варианта вычислительной реализации АКОР-алгоритма: с вычислением параметров до начала реализации процесса управления (далее
такой вариант назовем «асинхронным») и с определением параметров в
темпе с процессом управления (назовем «синхронной» реализацией).
Первый вариант, выигрывая в количестве вычислительных операций,
проигрывает в объеме памяти и количестве операций обмена с ней, в
связи с чем нельзя сказать до проведения моделирования, какой из алгоритмов обеспечит лучшее значение показателей качества.
Дальнейшее изложение строится по следующей схеме: вначале приводится постановка задачи и результаты синтеза АКОР-алгоритма (эти
результаты носят обзорный характер), затем описываются свойства
АКОР-алгоритма и рассчитываются показатели, позволяющие определить ИЗ, вносимое различными вариантами его реализации.
2.3.1. Постановка задачи аналитического конструирования
оптимальных регуляторов (обзор)
Пусть уравнение процесса в системе управления имеет вид:
(2.29)
x[s] A[s 1]x[s 1] B[s 1]u[s 1] F[s 1] ,
44
где s = 0, 1, ..., N – такты дискретного времени, N – заданное число тактов управления; x[s] – вектор переменных состояний объекта управления,
имеет размерность n1, n – число состояний, причем x[0] – вектор заданных начальных условий; u[s] – вектор управляющих воздействий, имеет
размерность r1, r – число управляющих воздействий; A[s] – матрица
размерности nn (возможно, ее параметры зависят от такта времени),
определяющая объект управления; B[s] – матрица размерности nr (возможно, ее параметры зависят от такта времени), определяющая параметры канала выдачи управляющих воздействий на объект управления; F[s]
– детерминированное (известное для всего интервала управления) возмущение, имеет размерность n1.
Для расчета оптимальных управляющих воздействий uopt[s] должны
быть заданы:
желательные значения переменных состояния x*[s] s[0, N] (задающие воздействия);
желательные значения управляющих воздействий u*[s] s[0, N –
1] (номинальные управления);
параметры квадратического критерия для выбора управляющих
воздействий uopt[s] s[0, N – 1];
начальные условия для вектора состояния x[0];
интервал времени (или число тактов управления N), на котором
рассматривается процесс управления.
Замечание. x[s] предполагается доступным для измерения без помех
всех xi[s], i = 1, ..., n.
Синтез алгоритма управления в методе АКОР основан на минимизации квадратического критерия оптимальности, который имеет вид:
x[ s] x [ s ] Q[ s ]x[ s ] x [ s ]
u[s] u [s] R[s]u[s] u [s]
T
J x[ N ] x * [ N ] K [ N ] x[ N ] x * [ N ]
N 1
*
T
*
s 0
*
T
*
(2.30)
где x[N] – x*[N] – отклонение переменных состояния от задания в конце процесса управления (на последнем такте управления); x[s] – x*[s] –
отклонение переменных состояния от задания в процессе достижения цели; u[s] – u*[s] – отклонение управляющих воздействий от номинальных;
(x[N] – x*[N])T K[N](x[N] – x*[N]) – часть критерия, характеризующая качество достижения конечной цели; (x[s] – x*[s])T Q[s](x[s] – x*[s]) – часть
критерия, отвечающая за качество пути достижения цели; (u[s] – u*[s])T
R[s](u[s] – u*[s]) – «штраф» за использование управляющих воздействий,
отличных от номинальных значений.
Смысл параметров критерия (2.30):
45
K[N], Q[s], s = 1, ... , N – 1 – симметричные неотрицательно определенные матрицы размерности nn;
R[s], s = 1, ... , N – 1 – симметричная положительно определенная
матрица размерности rr.
Отметим, что требование строгой положительной определенности
R[s] «наследовано» при переносе метода АКОР, предложенного для САУ
с непрерывным временем, на САУ с дискретным временем. Требование
положительной определенности матрицы R[s] является достаточным, но
не всегда необходимым для существования решения. В системе с непрерывным временем алгоритм управления содержит обратную матрицу R-1 ,
ее существование и гарантируется свойством положительной определенности. В задачах с дискретным временем требуется обращать матрицу
(R[s] + BT[s]K[s + 1]B[s]), поэтому, если BT[s]K[s + 1]B[s] обратима (это
иногда имеет место), то можно положить R[s] = 0, при этом отклонения
u[s] от u*[s] не штрафуются (естественно, значения управляющих воздействий могут оказаться слишком большими по абсолютной величине).
Оптимальные управляющие воздействия uopt[s], s = 0, ..., N – 1, доставляющие минимум критерию (2.30), находятся в форме отрицательной
обратной связи по состоянию процесса:
u opt [ s ] C[ s ]x[ s ] G[ s ] ,
(2.31)
где C[s] имеет размерность rn; матричный коэффициент C[s] ответствен за контур обратной связи; G[s] имеет размерность r1; матричный
коэффициент G[s] ответствен за воспроизведение задающих воздействий
и за реакцию САУ на детерминированные возмущения.
Параметры регулятора C[s] и G[s] находятся в результате решения
следующих матричных уравнений:
1
W1[ s] R[ s] BT [ s]K [ s 1]B[ s] ,
(2.32)
W [s] B[s]W1[s]B [s] ,
(2.33)
K [ s] Q[ s] AT [ s]K [ s 1] A[ s]
(2.34)
T
уравнение Риккати:
AT [ s]K [ s 1]W [ s]K [ s 1] A[ s],
[ s] F [ s ] x *[ s 1] A[ s ]x *[ s] B[ s]u *[ s] ,
L[s] L[s 1] 2 [s]K[s 1] E W [s]K[s 1] A[s],
T
где E – единичная матрица,
M [ s] L[ s 1] T [ s]K [ s 1] E W [ s]K [ s 1] [ s]
M [ s 1] 0.25L[ s 1]W [ s]LT [ s 1] ,
46
(2.35)
(2.36)
(2.37)
C[s] W1[s]BT [s]K[s 1] A[s] ,
D[s] W1[s]BT [s]K[s 1] [s] 0.5BT [s]LT [s 1],
(2.38)
(2.39)
G[ s ] C[ s ]x [ s ] u [ s ] D[ s ] .
*
*
(2.40)
Для осуществления расчетов по формулам (2.31–2.40) должны
быть заданы:
1) x[0] – вектор начальных условий;
2) матрицы объекта управления A[s], B[s], матрица детерминированных
возмущений на входе объекта управления F[s], матрицы параметров квадратического критерия K[N], Q[s], R[s] для всех тактов управления s;
3) L[N] = [0], M[N] = [0] – граничные условия.
Как известно, в методе АКОР ограничения на переменные состояния
объекта управления x[s] и управляющие воздействия u[s] в явном виде не
накладываются; но косвенно учитываются (и регулируются) штрафами за
отклонения (матрицы K[s], Q[s], R[s] задают весовые коэффициенты этих
штрафов).
Значение критерия при оптимальном управлении рассчитывается по
следующей формуле:
T
J p x[0] x*[0] K[0] x[0] x*[0] L[0] x[0] x*[0] M [0] .
(2.41)
Матрицы K[0], L[0] и M[0] получаются по рекуррентным формулам (2.31–2.40).
Приведенные алгоритмы решения задачи АКОР получаются аналогично изложенным в [14, 36, 40, 49, 68], с учетом следующих особенностей:
1. Учитывается наличие детерминированных возмущений на входе
объекта F[s].
2. Значения задающих воздействий x*[s] и номинальных u*[s] – возможно, ненулевые.
Перечислим свойства алгоритма АКОР, обеспечившие его широкую
популярность в научных публикациях:
1. Процесс расчета параметров АКОР-регулятора (2.32)–(2.40) не
связан с процессом реализации управляющих воздействий (2.31), поэтому можно выполнить этот расчет до начала процесса управления.
2. Значение критерия оптимальности, соответствующее управлению
(2.31), получается в виде компактной формулы (2.41), может быть также
вычислено до начала процесса управления. Это значение полезно использовать для сопоставления «расчетного» (2.41) и фактического значения
критерия (последнее определяется в ходе процесса управления): существенные расхождения могут послужить сигналом для корректировки параметров алгоритма.
3. Алгоритм содержит большое число параметров, позволяющих варьи
47
ровать значения показателей качества управления за счет матриц штрафов K[s], Q[s], R[s].
4. В отличие от инженерных алгоритмов АКОР-алгоритм реагирует
не только на текущие и прошлые значения задающих воздействий, но
учитывает также и будущие значения, подготавливая ресурсы САУ заранее к ожидаемым изменениям.
5. В системах автоматической стабилизации при постоянных параметрах объектов значения матриц C[s] и G[s] стремятся к константным,
что позволяет отказаться от их многократных расчетов.
Перечислим также свойства алгоритма АКОР, вызывающие его
неприятие инженерами для решения практических задач:
1. Критерий (2.30) не поддается инженерной трактовке: в нем отсутствуют связи с привычными для инженера показателями быстродействия,
точности, устойчивости, цены управления. Поэтому при попытках внедрить алгоритм АКОР на производстве разработчики должны всегда дополнять его вычислением этих показателей и сравнивать именно эти показатели (а не критерий (2.30)) с конкурирующими алгоритмами.
2. Количество настраиваемых параметров в алгоритме АКОР слишком велико, принципы настройки неясны.
3. При решении задачи стабилизации окончание процесса управления выглядит неудовлетворительно: несмотря на отсутствие изменений
внешних факторов в САУ возникает переходный процесс, связанный с
параметрическими возмущениями (существенными отличиями C[s] и
G[s] на последних тактах от их стационарных значений).
4. Алгоритм АКОР предполагает наличие измерений всех компонент
вектора состояния. На практике это случается редко, в связи с чем структуру САУ приходится усложнять для восстановления недостающих компонент (например, вводить фильтр Люенбергера [1]).
Ниже рассматривается еще одно, неизученное направление анализа
алгоритма АКОР и его сравнения с инженерным ПИД-алгоритмом – с позиций учета ИЗ.
2.3.2. Две схемы реализации задачи АКОР
Схема №1 («асинхронная» реализация). Как видно из (2.32) –
(2.40), параметры регулятора (2.39) могут быть рассчитаны заранее. Соответственно реализация алгоритма АКОР может быть организована как
двухэтапная. На первом этапе рассчитываются параметры регулятора –
матрицы C[s] и G[s] (2.32–2.40) для s = N – 1, N – 2, ..., 0. Это производится в «обратном» времени. Матрицы С[s] и G[s] сохраняют в памяти. Затем, на втором этапе, производят непосредственное управление в реальном времени, начиная с s = 0. При этом используют значения матриц
48
C[s] и G[s] из памяти. Это выполняется в «прямом» времени.
Достоинства данной схемы:
упрощение расчетов в реальном времени (все громоздкие расчеты проводятся до начала управления, соотношение затрат на расчеты
см. далее, в табл. 1 на странице 53);
из этого следует, что в систему будет вноситься меньшее ИЗ, связанное с вычислениями по алгоритму управления.
Недостатки схемы №1:
большой расход памяти (при больших N, n, r – до недопустимых
пределов);
поскольку параметры регулятора рассчитываются заранее, то они
отражают сведения о параметрах объекта A[s], B[s] и (что более существенно) F[s], u*[s], x*[s] для всего временного интервала s = 0, …, N. На
практике не всегда удается обеспечить высокую точность этих сведений,
так при реализации управления может оказаться, что параметры объекта
и возмущения в ходе управления оказались отличными от принятых в
расчетах. Причинами этого может быть естественный дрейф параметров
объекта, неожиданные изменения режима (задающих воздействий) или
неполная предсказуемость возмущений. Но в данной схеме реализации
расчетов эти изменения не будут учтены. Таким образом, получается,
что параметры регулятора с течением времени могут оказаться оторванными от реальной ситуации на объекте.
Схема №2 («синхронная» реализация). Представим себе, что имеет
место k-й такт. Тогда измеряем x[k] и вычисляем текущие параметры регулятора, s = k, ... , N. Матрицы C[s], G[s] (2.32–2.40) для s = k+1, ... , N–1
не запоминаем. Вычисляем uopt с рассчитанными параметрами регулятора
и переходим на следующий такт. В этой схеме выдача управляющих
воздействий на объект и процесс расчета параметров неразделимы. На
каждом s-м такте совершается расчет параметров в обратном времени
от N до s, рассчитывается управление, производится переход к
(s+1)-му такту. Интервал обратного хода (соответственно объемы вычислений) либо сокращается от такта к такту, либо (для систем стабилизации, имеющих длительный период непрерывной работы) этот интервал остается постоянным, а последний такт на каждом следующем
шаге «отодвигается».
Недостатки данной схемы (обратные достоинствам схемы № 1):
большой объем вычислений (особенно на начальных тактах);
следовательно, происходят задержки в выдаче управляющих воздействий из-за вычислений.
Достоинства схемы № 2 (обратные недостаткам схемы № 1):
49
имеется возможность учитывать текущие изменения F[s], x*[s],
u*[s], A[s], B[s] и адаптировать параметры регулятора к текущей ситуации;
экономится память (не нужно хранить будущие параметры регулятора).
Стремление объединить достоинства обеих схем, т. е. скорость расчета схемы № 1 и адаптивность к ситуации на объекте схемы № 2 породило так называемую двухэтапную процедуру АКОР (предложена в работах А. А. Первозванского):
поскольку возмущения F[s] и задающее воздействие x*[s] для будущих моментов времени (по самой сути управления) известны не точно, то
для будущих тактов их естественно заменить средними значениями;
тогда интервал времени от s до N можно разделить на два неравных подинтервала: малый [s, s+1] и большой [s+1, N];
для второго интервала можно переписать модель объекта в агрегированных показателях;
задача АКОР станет содержать только два шага: «длинный» и
«оперативный»;
наличие «длинного» шага позволит «забронировать» ресурсы
управления на будущее;
наличие «оперативного» шага позволит принять хорошее тактическое решение.
В главе 3 приведены подробные исследования схемы № 1 и № 2.
2.3.3. Частный случай задачи АКОР
Имеется интересный (теоретический) частный случай – сходимость
переменных состояния x[s] к заданным значениям x*[s] за один такт. Теоретические предположения следующие:
можно достичь сходимости за один такт только в отсутствии ограничений на u[s], т. е. при R[s] 0;
также необходимо, чтобы размерность вектора переменных состояний x[s] и вектора управляющих воздействий u[s] совпадали (иначе, если r < n, то управляющие воздействия будут искать компромисс между
стремлением обеспечить xi[s] xi*[s] ( i = 1, ..., n).
Из этого следует постановка задачи АКОР для этого частного
случая:
R[s] 0, B = E.
(2.42)
Обе матрицы имеют размерность nn (r = n). Если общие формулы
справедливы, то должно получиться x[s] x*[s], s 1.
Следствие из общих формул АКОР (2.29), (2.31) для этого частного
случая:
50
x[ s] A[ s 1]x[ s 1] Bu opt [ s 1] F [ s 1]
A[ s 1]x[ s 1] BC [ s 1]x[ s 1] BG[ s 1] F [ s 1].
(2.43)
Вместо uopt подставим его значение, записанное по формуле (2.31).
Вместо G[s – 1] подставим ее выражение по формуле (2.40):
G[s – 1] = C[s – 1] x*[s – 1] + u*[s – 1] – D[s – 1] в (2.43):
x[ s ] A[ s 1] BC[ s 1]x[ s 1] BC[ s 1]x * [ s 1]
(2.44)
Bu * [ s 1] BD[ s 1] F [ s 1].
А. Вычисляем:
0.5 B R[ s 1] B
K [ s ]B
BD[ s 1] B R[ s 1] B T K [ s ]B
T
1
B T K [ s ][ s 1]
1
B T LT [ s ]
(2.45)
BK 1 [ s ]K [ s ][ s 1] 0.5 K 1 [ s ]LT [ s ]
[ s 1] 0.5 K 1 [ s ]LT [ s ].
Б. Вычисляем:
LT [ s] LT [ s 1] 2 T [ s]K [ s 1]
1
E B R[ s] B T K [ s 1]B B T K [ s 1] A[ s]
(2.46)
LT [ s 1] 2 T [ s]K [ s 1] E E A[ s] 0.
Подставив полученный результат (2.46) в формулу (2.45) и используя (2.35) получаем:
BD[ s 1] [s 1] A[s 1]x * [ s 1] Bu * [ s 1]
F[s 1] x * [s].
(2.47)
Подставим данное выражение (2.47) в уравнение процесса в объекте
управления (2.44):
x[ s ] A[ s 1]x[ s 1] BC[ s 1]x[ s 1]
BC[ s 1]x * [ s 1] Bu * [ s 1]
(2.48)
A[ s 1]x * [ s 1] Bu * [ s 1] x * [ s ]
F [ s 1] F [ s 1].
Из (2.48) получим формулу для отклонений x[s] от x*[s]:
x[s] x [s] A[s 1] BC[s 1]x[s 1] x [s 1].
*
*
(2.49)
Если знать, что (A[s–1] – BC[s–1]) в (2.49) устойчива, то было бы ясно, что при x ошибка (x[s] – x*[s])0.
Рассчитаем по АКОР (A[s–1] – BC[s–1]):
C[s 1] R[ s 1] BT K[ s]B
1
51
BT K[ s] A[ s 1] A[s 1] ,
A[s 1] BC[s 1] A[ s 1] A[ s 1] 0 ,
тогда:
поэтому начиная с s = 1:
x[1] x [1] 0x[0] x [0] [0] .
*
*
(2.50)
Таким образом, подтверждена сходимость задачи АКОР к требуемому значению задания за один такт (2.50), причем сходимость не зависит
от матрицы А[s] (при любых ее значениях и изменениях во времени возможна сходимость – дрейф параметров не успеет сказаться за один такт).
Замечание. Конечно, данный факт относится скорее к курьезам:
управляющие воздействия обычно получаются настолько большими, что
не соответствуют реальным технологическим ограничениям. Отметим
всё же полезность этого результата, позволяющего заметить различия
между системами с непрерывным и дискретным временем.
2.3.4. Перечень настраиваемых параметров задачи АКОР
Настраиваемыми параметрами задачи АКОР являются:
матрицы K[N], Q[s], R[s], вводящие весовые коэффициенты штрафов за отклонения значений переменных состояния в конце процесса от
заданий, в течение процесса от заданий и за отклонения управляющих
воздействий от номинальных значений. Подбирая их, можно добиваться
различных показателей качества. Необходимо учитывать, что имеют значения относительные, а не абсолютные величины элементов матриц (по
отношению друг к другу).
Кроме того, при моделировании можно также изменять другие параметры задачи АКОР, тем самым меняя цель исследования:
матрицы А[s] и В[s], которые описывают объект управления. Они
могут зависеть от текущего такта, а могут быть постоянными. Исследование влияния дрейфа параметров матриц объекта управления представляет интересную научную задачу, имеющую практическое значение [4,
55]. Необходимо отметить, что задача АКОР при реализации расчетов по
схеме № 1 (см. п. 2.3.2) никак не учитывает изменения параметров. Матрица А[s] также несет в себе информацию об устойчивости объекта;
матрицы F[s], x*[s], u*[s], которые отвечают соответственно за
внешние возмущающие воздействия, поступающие на объект управления; задания, к которым должны стремиться переменные состояния; номинальные значения управляющих воздействий;
параметры n, r, N, которые отвечают за число переменных состояния, число управляющих воздействий и число тактов управления.
Подчеркнем еще раз, что при исследовании качества управления
АКОР-алгоритмом необходимо попутно рассчитывать не только критерий
(2.30), но и показатели, перечисленные в п. 2.2, так как критерий (2.30)
не имеет наглядной инженерной трактовки.
52
2.3.5. Оценка вычислительной сложности схем реализации
расчетов задачи АКОР
Оценка вычислительной сложности схемы № 1. В данной схеме
расчет по формулам (2.32–2.40) осуществляется в обратном времени с
такта N – 1 до нулевого такта. Всего получается N повторений расчетов.
Кроме того, расчет по формуле (2.31) осуществляется в прямом времени
от нулевого такта до такта N – 1 (всего N повторений).
Для оценки вычислительной сложности определялось количество
матриц, количество операций с ними и их размерности для общего случая (в переменных n, r) для каждой формулы (2.31–2.40), согласно характеристике алгоритма (2.5). Результат приведен в табл. 1.
Таблица 1
Количество элементарных операций одного такта расчета
управляющих воздействий алгоритма АКОР
Номер
формулы
Сложений, N1
Умножений, N2
2.31
rn + r
rn
Делений, Сравнений,
Перемещений, N5
N3
N4
–
–
3rn + r
r2 + r
2r
–
–
–
–
–
–
–
–
–
–
n3 + 4n2 + 16n
2.38
nr2 + rn2
nr2 + rn2
6n3 + 2n2
6n3
n2 + nr + 3n
n2 + nr
2n3 + 3n2 + n
2n3 + 2n2 + 2n
n3 + 2n2 + 4n + 3
n + 2n2 + 2n + 1
2
3r2n
3r2n
2r4 + 2r3 + 5r2 +
r2n + 5nr + rn2 +
4r
nr2 + 5nr + rn2
6n3 + 16n2
3n2 + 3nr + 3n
2n3 + 6n2 + 9n
–
–
2.39
n2 + r2 + 2rn + r n2 + r2 + 2rn + r
–
–
2.40
rn + 2r
rn
r4 + r3 + 3r2 + r4 + r3 + r2 + 5r2n
5r2n + 5rn + + 5rn + r + 9n3
5r + 9n3 + 9n2 + + 6n2 + 2n2r +
2n2r + 8n + 2
4n + 1
–
–
r2 + r
2r
3r2n + 6r2 + nr
3n2 + 3r2 + 8nr + n
+ 2r
3rn + 2r
2r4 + 2r3 + 14r2 +
4r2n + 28nr + 9r
+ 9n3 + 32n2 +
2n2r + 29n
2.32
2.33
2.34
2.35
2.36
2.37
Всего
r4 + r3 + r2n +
2r2 + rn2 + r
r3 + r4 + r2n + rn2
Для получения реальных вычислительных затрат необходимо данные, приведенные в табл. 1, умножить на количество повторений в данной схеме расчетов – N.
Замечания
Данная оценка (табл. 1) не является ни верхней, ни нижней границей
вычислительной сложности схем №1 и №2, поскольку существует возможность оптимизации расчетов в зависимости от конкретных значений
r и n. Примером является формула (2.38)
53
C[s] W1[s]BT [s]K[s 1] A[s] ,
где умножается матрица W1[s] размерности rr на матрицу BT[s] размерности rn, на матрицу K[s + 1] размерности nn и на матрицу A[s] размерности nn. Получается следующая строка умножений (в размерностях)
rr * rn * nn * nn.
Если r > n, то необходимо проводить умножение матриц справа
налево (количество операций будет n3 + 2rn2), а если r < n, то умножать нужно слева направо (количество операций будет 3r2n), тогда
общее количество операций будет меньшим, чем в случае умножения в
противоположном направлении.
1. Возможна дополнительная оптимизация вычислений за счет расхода
памяти для запоминания промежуточных вычислений, которые повторяются
в некоторых формулах (2.32–2.40). Например, в формулах (2.34) и (2.36) вычисляется одно и то же произведение W [ s ]K [ s 1] A[ s ] . Его можно запомнить в памяти и второй раз не вычислять.
Используя табл. 1, приведем зависимости числа каждого типа операций от роста числа переменных состояния n, управляющих воздействий r
и тактов управления N.
Таблица 2
Зависимость количества элементарных операций
от числа переменных состояния
Число переменных
состояния
n=1
n=2
n=3
n=4
n=5
n=6
n=7
n=8
n=9
n = 10
Сложений
Умножений
Делений
Сравнений
Перемещений
10800
24800
52200
98400
168800
268800
403800
579200
800400
1072800
8400
21100
46600
90300
157600
253900
384600
555100
770800
1037100
600
600
600
600
600
600
600
600
600
600
4
4
4
4
4
4
4
4
4
4
26800
54000
99200
167800
265200
396800
568000
784200
1050800
1373200
Примечание. Число управляющих воздействий – 2, число тактов
управления – 100.
На рис. 8 (соответственно – на рис. 9 и 10) представлена зависимость, построенная по данным табл. 2 (соответственно – табл. 3 и 4) для трех типов операций (сложение, умножение и перемещение), доля операций типа «деление»
и «сравнение» очень мала и не представлена на графике. Поскольку значения
количества операций типа «сложение» и «умножение» близки, на графике показана кривая для операции типа «сложение» (коли чество данных операций
54
чуть больше, чем операций типа «умножение», что видно из табл. 2, 3, 4).
1600000
Число операций
1400000
Перемещения
1200000
1000000
800000
Умножения, сложения
600000
400000
200000
0
1
2
3
4
5
6
7
8
9
10
Число переменных состояния
Рис. 8. Рост числа операций в зависимости от числа переменных состояния (видна нелинейная зависимость числа операций от числа переменных состояний).
Таблица 3
Зависимость количества элементарных операций
от числа управляющих воздействий
Число управляющих воздействий
r=1
r=2
r=3
r=4
r=5
r=6
r=7
r=8
r=9
r = 10
Сложений
Умножений
83600
98400
124000
167000
236400
343600
502400
729000
1042000
1462400
76500
90300
114500
155700
222900
327500
483300
706500
1015700
1431900
Делений Сравнений
200
600
1200
2000
3000
4200
5600
7200
9000
11000
200
400
600
800
1000
1200
1400
1600
1800
2000
Перемещений
139100
167800
214900
293600
421900
622600
923300
1356400
1959100
2773400
Примечание. Число переменных состояния – 4, число тактов управления – 100.
55
3000000
Число операций
2500000
Перемещения
2000000
1500000
Умножения, сложения
1000000
500000
0
1
2
3
4
5
6
7
8
9
10
Число управляющих воздействий
Рис. 9. Рост числа операций в зависимости от числа управляющих воздействий (видна нелинейная зависимость (большей степени, чем у зависимости от числа переменных состояния по сравнению с рис. 8) числа операций от числа управляющих воздействий).
Таблица 4
Зависимость количества элементарных операций
от числа тактов управления
Число тактов
управления
N = 10
N = 20
N = 30
N = 40
N = 50
N = 60
N = 70
N = 80
N = 90
N = 100
Сложений
Умножений
Делений
Сравнений
Перемещений
9840
19680
29520
39360
49200
59040
68880
78720
88560
98400
9030
18060
27090
36120
45150
54180
63210
72240
81270
90300
60
120
180
240
300
360
420
480
540
600
40
80
120
160
200
240
280
320
360
400
16780
33560
50340
67120
83900
100680
117460
134240
151020
167800
Примечание. Число переменных состояния – 4, число управляющих
воздействий – 2.
56
180000
Число операций
160000
Перемещения
140000
120000
100000
Умножения, сложения
80000
60000
40000
20000
0
10
20
30
40
50
60
70
80
90
100
Число тактов управления
Рис. 10. Рост числа операций в зависимости от числа тактов управления – времени управления (видна линейная зависимость).
Оценка вычислительной сложности схемы № 2. В данной схеме
расчет по формулам (2.32–2.40) осуществляется в обратном времени, от
такта N – 1 до нулевого такта. Всего получается N повторений расчетов.
Но данная процедура повторяется для каждого такта управления (поскольку матрицы параметров регулятора не сохраняются в памяти), –
правда, и количество тактов в обратном времени тоже уменьшается. Получается следующая зависимость количества повторений расчетов для
каждого последующего такта N, N – 1, N – 2, …, 1 или
N ( N 1)
N2 N
N
2
2
. Кроме того, осуществляется N расчетов (от ну-
левого до N – 1 такта управления) по формуле (2.31).
Используя табл. 1, приведем зависимости числа каждого типа операций от роста числа переменных состояния n, управляющих воздействий r
и тактов управления N.
Таблица 5
Зависимость количества элементарных операций
от числа переменных состояния
Число переменных состояния
n=1
n=2
n=3
n=4
n=5
n=6
n=7
n=8
n=9
n = 10
Сложений
525600
1222700
2596500
4919700
8465000
13505100
20312700
29160500
40321200
54067500
Умножений Делений
414300
1045750
2323600
4520550
7909300
12762550
19353000
27953350
38836300
52274550
57
30300
30300
30300
30300
30300
30300
30300
30300
30300
30300
Сравнений
Перемещений
20200
20200
20200
20200
20200
20200
20200
20200
20200
20200
1313800
2657700
4910600
8345200
13234200
19850300
28466200
39354600
52788200
69039700
Примечание. Число управляющих воздействий – 2, число тактов
управления – 100.
На рис. 11 (соответственно – рис. 12 и 13) представлена зависимость
из табл. 5 (соответственно – из табл. 6 и 7) для трех типов операций
(сложение, умножение и перемещение), доля операций типа «деление» и
«сравнение» очень мала и не представлена на графике.
Таблица 6
Зависимость количества элементарных операций
от числа управляющих воздействий
Число управляющих воздействий
r=1
r=2
r=3
r=4
r=5
r=6
r=7
r=8
r=9
r = 10
Сложений
Умножений
Делений
Сравнений
Перемещений
4197050
4919700
6187750
8334500
11814450
17203300
25197950
36616500
52398250
73603700
3843450
4520550
5722850
7783650
11157450
16419950
24268050
35519850
51114650
72112950
10100
30300
60600
101000
151500
212100
282800
363600
454500
555500
10100
20200
30300
40400
50500
60600
70700
80800
90900
101000
6960200
8345200
10659400
14569400
20984200
31055200
46176200
67983400
98355400
139413200
Примечание. Число переменных состояния – 4, число тактов управления – 100.
Поскольку значения количества операций типа «сложение» и
«умножение» близки, на графике показана кривая для операции типа
«сложение» (количество данных операций чуть больше, чем операций
типа «умножение», что видно из табл. 5, 6, 7).
80000000
Число операций
70000000
Перемещения
60000000
50000000
40000000
Умножения, сложения
30000000
20000000
10000000
0
1
2
3
4
5
6
7
8
9
10
Число переменных состояния
Рис. 11. Рост количества операций в зависимости от числа переменных состояния (видна
нелинейная зависимость числа операций от числа переменных состояний).
58
160000000
Число операций
140000000
120000000
Перемещения
100000000
80000000
Умножения, сложения
60000000
40000000
20000000
0
1
2
3
4
5
6
7
8
9
10
Число управляющих воздействий
Рис. 12. Рост количества операций в зависимости от числа управляющих воздействий
(видна нелинейная зависимость (большей степени, чем у зависимости от числа
переменных состояния по сравнению с рис. 11) числа операций от числа
управляющих воздействий).
Таблица 7
Зависимость количества элементарных операций
от числа тактов управления
Число тактов
управления
N = 10
N = 20
N = 30
N = 40
N = 50
N = 60
N = 70
N = 80
N = 90
N = 100
Сложений
Умножений
Делений
Сравнений
Перемещений
53670
204740
453210
799080
1242350
1783020
2421090
3156560
3989430
4919700
49305
188110
416415
734220
1141525
1638330
2224635
2900440
3665745
4520550
330
1260
2790
4920
7650
10980
14910
19440
24570
30300
220
840
1860
3280
5100
7320
9940
12960
16380
20200
91120
347440
768960
1355680
2107600
3024720
4107040
5354560
6767280
8345200
Примечание. Число переменных состояния – 4, число управляющих
воздействий – 2.
59
9000000
Число операций
8000000
7000000
Перемещения
6000000
5000000
Умножения, сложения
4000000
3000000
2000000
1000000
0
10
20
30
40
50
60
70
80
90
100
Число тактов управления
Рис. 13. Рост количества операций в зависимости от числа тактов управления – времени
управления (видна нелинейная зависимость, в отличие от схемы № 1 реализации вычислений, где линейная зависимость, см. рис. 10).
Число операций типа «сложение»
Для сравнения необходимого числа элементарных операций для реализации оптимального алгоритма управления, синтезированного методами аналитического конструирования оптимальных регуляторов, по «асинхронной» и
«синхронной» схемам организации расчетов, сопоставим кривые зависимости
роста количества элементарных операций типа «сложения» от числа переменных состояния (рис. 14), управляющих воздействий (рис. 15) и тактов управления (рис. 16). Как видно из рис. 14, 15, 16, вычислительная схема № 2 с
«синхронным» расчетом параметров регулятора (и, соответственно, возможностью учета изменяющихся параметров объекта управления, задающих воздействий и т. п.) требует значительно больших вычислительных ресурсов.
60000000
50000000
Схема №2 (синхронная)
40000000
30000000
Схема №1 (асинхронная)
20000000
10000000
0
1
2
3
4
5
6
7
8
9
10
Число переменных состояния
Рис. 14. Влияние роста числа переменных состояния на количество операций типа
«сложение» для двух схем реализации вычислительного процесса (видно, что
схема № 2 требует существенно больших вычислительных ресурсов).
60
Число операций типа «сложение»
80000000
70000000
Схема №2 (синхронная)
60000000
50000000
40000000
Схема №1 (асинхронная)
30000000
20000000
10000000
0
1
2
3
4
5
6
7
8
9
10
Число управляющих воздействий
Рис. 15. Влияние роста числа управляющих воздействий на количество операций типа
«сложение» для двух схем реализации вычислительного процесса (видно, что схема № 2
требует существенно больших вычислительных ресурсов).
Число операций типа «сложение»
6000000
5000000
Схема №2 (синхронная)
4000000
3000000
Схема №1 (асинхронная)
2000000
1000000
0
10
20
30
40
50
60
70
80
90
100
Число тактов управления
Рис. 16. Влияние роста числа тактов управления на количество операций типа «сложение»
для двух схем реализации вычислительного процесса (видно, что схема № 2 требует существенно больших вычислительных ресурсов).
Оценка требуемого объема памяти для реализации вычислительных схем № 1 и № 2 алгоритма управления, синтезированного методами
аналитического конструирования оптимальных регуляторов.
Для оценки требуемого объема памяти, необходимого для расчета
управляющих воздействий на одном такте управления, определялось количество матриц и их размерности для общего случая (в переменных n, r)
для каждой формулы (2.31–2.40). Все элементы матриц должны представляться числами повышенной точности. Результат приведен в табл. 8.
61
Таблица 8
Количество элементов матриц
Номер формулы
2.31
2.32
2.33
2.34
2.35
2.36
2.37
2.38
2.39
2.40
Всего
Число элементов
rn + n + r
r2 + 2nr + n2
2nr + r2
9n2
3n + n2 + nr + r
2n + 5n2
6n + 4n2 + 1
2n2 + r2 + nr
2
n + r2 + 2nr + 2n
2r + n + rn
4r2 + 23n2 + 10rn + 15n + 4r + 1
Еще необходимо также хранить четыре константы.
Для вычислительной схемы № 1 количество необходимых чисел для
запоминания параметров регулятора определяется размерностями матриц
C[s] и G[s], а также числом тактов управления и равно N(nr + r). Поскольку расчеты параметров осуществляются до начала управления, то
они могут быть произведены вне технических средств, реализующих вычисление управляющих воздействий. Но будем считать, что требуется
объем памяти (выраженный в количестве чисел), равный объему, необходимому для расчета одного такта управления по формулам (2.31)–(2.40)
(см. табл. 8), из которого нужно вычесть объем, равный nr + r (поскольку
эта величина входит в следующее слагаемое) и добавить объем, равный
N(nr + r). Получим оценку:
I14 = 4r2 + 23n2 + 9rn + 15n + 3r + 1 + N( nr + r),
(2.51)
где I14 – максимальное количество чисел повышенной точности, которые
необходимо хранить одновременно в памяти для организации вычислительной схемы № 1.
Для вычислительной схемы № 2 количество необходимых элементов
определяется только объемом памяти (выраженным в количестве чисел)
для выполнения расчета одного такта управления (см. табл. 8)
I14 = 4r2 + 23n2 + 10rn + 15n + 4r + 1,
(2.52)
где I14 – максимальное количество чисел повышенной точности, которые
необходимо хранить одновременно в памяти для организации вычислительной схемы № 2.
Замечание. В зависимости от организации вычислительного процесса
количество хранимых чисел может быть различным. Например, все вычисления по формулам (2.32)–(2.40) могут быть выполнены непосредственно
при вычислении (2.31) (путем подстановки соответствующих выражений
62
из (2.32)–(2.40)). При этом достаточно количества чисел, равного количеству всех элементов в матрицах A, B, K, Q, R, F, x*, u*. В этом случае для
вычислительной схемы №1 формула (2.51) примет вид
I14 = r2 + 3n2 + rn + 2n + r + N( nr + r),
(2.53)
а для вычислительной схемы № 2 формула (2.52) примет вид
I14 = r2 + 3n2 + rn + 2n + r.
(2.54)
Разница в объеме памяти между вычислительной схемой № 1 (2.53)
и вычислительной схемой № 2 (2.54) для алгоритма управления, синтезированного методами АКОР, составляет
(2.55)
I14* N n r r .
Формула (2.55) отражает линейную зависимость между схемами реализации, однако формулы (2.51–2.54) показывают степенную зависимость от основных параметров задачи управления: числа переменных состояния n и числа управляющих воздействий r. От числа тактов управления N объем памяти, выраженный в количестве хранимых чисел (2.51),
(2.53), зависит линейно.
Зависимость количества хранимых чисел, необходимого для реализации вычислительных схем, от роста числа переменных состояния приведены в табл. 9 и рис. 17.
Таблица 9
Зависимость количества хранимых чисел от числа переменных состояния
Число переменных состояния
n=1
n=2
n=3
n=4
n=5
n=6
n=7
n=8
n=9
n = 10
Схема №1
479
781
1129
1523
1963
2449
2981
3559
4183
4853
Схема №2
83
187
337
533
775
1063
1397
1777
2203
2675
Примечание. Число управляющих воздействий – 4, число тактов
управления – 100.
63
Число хранимых элементов
6000
5000
Схема №1 (асинхронная)
4000
3000
Схема №2 (синхронная)
2000
1000
0
1
2
3
4
5
6
7
8
9
10
Число переменных состояния
Рис. 17. Рост количества хранимых элементов в зависимости от числа переменных состояния (видна нелинейная зависимость и разница между вычислительными схемами).
При описании характеристик алгоритмов управления в п. 2.2 использовались также такие параметры, как максимальное количество целых
(I12) и действительных (I13) чисел, которые необходимо одновременно
хранить в памяти (2.8). Для вычислительных схем № 1 и № 2 эти параметры одинаковы и равны количеству переменных, необходимых для организации циклов (количество целых чисел) и нулю (количество действительных чисел). Действительные числа простой точности не использовались в данных реализациях вычислений. Их можно использовать вместо
чисел повышенной точности для сокращения объема памяти, необходимого для реализации расчетов, но при этом следует заранее проверить
достижимую точность вычислений и оценить погрешность.
Для обычной реализации алгоритма АКОР необходимо четыре цикловые переменные и четыре переменные, хранящие число переменных
состояния, управляющих воздействий, тактов управления, текущий такт
управления. Все эти числа целые. Также нужны еще две переменные повышенной точности для организации операции умножения матриц и обращения матрицы. Поскольку доля дополнительных чисел необходимых
для реализации алгоритма АКОР очень мала в общем количестве, то их
можно не учитывать.
Замечание. Выбор типа представления чисел на ЭВМ (целый, действительный или повышенной точности) влияет на количество бит памяти, необходимых для хранения их значений, а также на скорость вычислений.
Оценка требуемой разрядности технических средств для реализации вычислительных схем № 1 и № 2 алгоритма управления, синтезированного методами аналитического конструирования оптимальных регуляторов.
Обе схемы предъявляют одинаковые требования к каналам передачи
64
данных. Канал передачи информации «объект-регулятор» должен иметь
разрядность по числу бит, необходимых для передачи всех переменных
состояния – n, а канал передачи информации «регулятор-объект» разрядность по числу бит, необходимых для передачи всех управляющих воздействий – r. Количество бит должно учитывать принятый способ кодирования и передачи информации в каналах данных.
Разрядность вычислительных средств влияет на скорость вычислений и
отражается в тактах необходимых для выполнения элементарных операций:
«сложение», «умножение», «деление», «сравнение», «перемещение».
2.3.6. Постановка задачи разработки алгоритмов для цифрового
регулятора с пропорционально-интегрально-дифференциальным
законом управления
Известно, что пропорционально-интергально-дифференциальный (ПИД)
– закон управления широко используется в САУ класса «вход-вы-ход» со
скалярным управляющим воздействием и скалярным выходом. В этом случае в непрерывном времени ПИД-закон имеет следующий вид [44, 49]:
t
U (t ) k p (t ) ki (l )dl k d
0
d (t )
,
dt
(2.56)
где kp, ki, kd – коэффициенты при пропорциональной, интегральной и
дифференциальной частях являются составляющими ПИД-закона управления; (t) – текущее значение рассогласования выхода объекта управления y(t) и задающих воздействий y*(t): (t) = y(t) – y*(t).
Заменим в (2.56) производные конечными разностями с интервалом
дискретизации t
U [ s ] U [ s 1]
s s 1
kp
k i s
t
t
(2.57)
s 2 s 1 s 2
kd
.
t 2
Подставляя [s] y * [ s] y[ s] в (2.57), получим дискретную модель
ПИД-регулятора:
U s U s 1 1 y * s ys 2 y * [ s 1] ys 1
(2.58)
3 y [ s 2] ys 2 ,
k
2k
k
где 1 k p k i t d , 2 k p d , 3 d – коэффициенты дисt
t
t
кретной модели регулятора.
*
65
Как видно из (2.58), вычислительная сложность ПИД-регулятора
очень мала, благодаря чему можно считать, что его реализация не вносит
вычислительного запаздывания в систему управления.
Вычислительная сложность одного такта управления (с расчетом коэффициентов регулятора) равна девяти операциям типа «сложение», пяти операциям типа «умножение», одной операция типа «деление» и четырем операциям типа «перемещение» для одного управляющего воздействия (r = 1).
ПИД-регуляторы можно использовать и для управления многосвязными объектами (если каждый контур управления снабдить собственным
регулятором с настройками, обеспечивающими устойчивость САУ в целом). Для расчета вычислительной сложности в этом случае необходимо
умножить каждую из приведенных констант на число управляющих воздействий. Верхняя оценка общей сложности алгоритма получается
умножением вычислительной сложности одного такта управления на их
количество: Nr(«коэффициент типа операции»).
2.3.7. Адаптация параметров
пропорционально-интегрально-дифференциального регулятора
Адаптивные системы можно разделить на два больших класса: самоорганизующиеся и самонастраивающиеся [10, 41, 53].
В классе самоорганизующихся систем [1, 43, 46, 53 ] в процессе функционирования происходит формирование алгоритма управления (его
структуры и параметров), позволяющего оптимизировать систему с
точки зрения поставленной цели управления. В классе самонастраивающихся систем (СНС) [1, 30, 41, 43, 49], в которых структура регулятора задана (заранее выбрана), требуется определить лишь алгоритм
настройки его коэффициентов (алгоритм адаптации).
СНС делятся на два подкласса: поисковые и беспоисковые. В беспоисковых СНС в явном или неявном виде имеется модель с желаемыми
динамическими характеристиками [42]. Задача алгоритма адаптации состоит в настройке коэффициентов регулятора таким образом, чтобы свести рассогласование между объектом управления и моделью к нулю. В
поисковых СНС минимум (или максимум) меры качества ищется с помощью специально организованных поисковых алгоритмов [53, 61, 73, 77].
Простейшими поисковыми системами являются большинство экстремальных систем, в которых недостаток априорной информации восполняется за счет текущей информации, получаемой в виде реакции объекта
на искусственно вводимые поисковые (пробные, тестовые) воздействия.
В данной работе рассматривается подход к адаптации ПИДрегулятора путем настройки его коэффициентов (2.58) поисковыми алгоритмами. Из возможных алгоритмов адаптации выбраны: алгоритм Хука66
Дживса, относящийся к классу адаптивных алгоритмов прямого поиска
экстремума функции [39, 53, 61], и генетический алгоритм [25, 80, 84,
88, 91]. В качестве обоснования такого выбора укажем, что данные алгоритмы представляют два полярных подхода к настройке параметров:
критериальный (алгоритм Хука-Дживса) и переборный (генетический алгоритм). Каждый из подходов имеет свои преимущества и недостатки, и
принципы, по которым можно отдать предпочтение какому-либо из них
при проектировании САУ, до настоящего времени не были полностью
ясны. Исследование вариантов реализации данных алгоритмов на основе
сопоставления вносимого ими ИЗ позволит не только дать основу для
выбора класса алгоритмов настройки параметров регулятора, но и сформировать предложения по их эффективной реализации.
Отметим, что включение контура адаптации в структуру ПИДрегулятора не является бесспорно полезным, если учесть вносимое ими
ИЗ. Казалось бы, включение такого контура в структуру ПИД-регулятора
должно привести к получению алгоритмов, конкурентоспособных по
сравнению с оптимальными алгоритмами, рассмотренными в п. 2.3.1, но
поисковые алгоритмы адаптации являются настолько вычислительно емкими, что они могут внести слишком большое информационное запаздывание, из-за которого не только будет утеряно преимущество адаптации,
но и ухудшится качество, достижимое ПИД-регулятором без адаптации.
Однако структура поисковых алгоритмов адаптации такова, что их
быстродействие может быть существенно повышено на базе использования современных идей распределенных вычислений. Результаты исследования адаптивного ПИД-регулятора алгоритмами Хука-Дживса и генетическими алгоритмами в гетерогенной распределенной вычислительной
системе приведены в главе 4.
Для использования алгоритмов настройки регулятора необходимо
внести следующие изменения в структуру системы управления: добавить
блок настройки параметров регулятора, включающий в себя модель объекта управления (рис. 18).
Алгоритм адаптивного прямого поиска Хука-Дживса. Предполагается, что критерий качества управления f(m), выбранный разработчиком
САУ в качестве основного, экстремально зависит от векторного аргумента m = [m1, m2, ... mv]Т, причем аналитическое выражение для функции
f(m) не задано. В рассматриваемых задачах управления аргументами
функции f(m) являются настраиваемые параметры регулятора или системы управления.
67
Реализуемое управляющее
воздействие u[s – 2] с запаздыванием 2
2
Возмущающее
воздействие F[s]
Переменные состояния
ОБЪЕКТ
объекта x[s]
УПРАВЛЕНИЯ
Помеха измерению h1[s]
Ограничение на величину
управляющего воздействия
Помеха выдачи
управления h2[s]
Задающее воздействие x*[s]
Расчетное управляющее воздействие
РЕГУЛЯТОР
ОР
Рассогласование
x*[s-ОР] – x[s- ОР]
с запаздыванием ОР
Блок настройки параметров регулятора
Рис. 18. Структурная компонентная схема дискретной замкнутой системы управления по
переменным состояния объекта с информационным запаздыванием и настройкой
параметров регулятора.
Все методы прямого поиска укладываются в следующую общую схему:
выбирается произвольная точка начального приближения m(0) и
начальное значение шага m(0);
процесс поиска экстремума организуется как итеративный.
Каждый d-й шаг итеративного процесса представляет собой следующие действия:
фиксируются все элементы вектора m(d), кроме одного, например,
j-го: [m1(d), m2(d), ... , mj -1(d), mj + 1(d), ... , mv(d)] фиксированы;
делаются пробные приращения вокруг mj (d):
[mj (d+1)] (1) = mj (d) + m (d); [mj (d+1)] (2) = mj (d) m (d);
находится направление изменения аргументов, которые доставляют «лучшие» значения функции (приближающие функцию к экстремуму)
– выбирают
[mj (d+1)] {[mj (d+1)](1), [mj (d+1)](2}
такое, чтобы значение функции
f(m1(d), m2(d), ... , mj -1(d), mj (d+1) , mj+1(d), ... , mv(d))
стало лучше, чем
f(m1(d), m2(d), ... , mj -1(d), mj (d) , mj+1(d), ... , mv(d));
последовательно выполняются те же действия для всех элементов
вектора m, что позволяет «экспериментально» увидеть реакцию объекта
на пробные возмущения;
68
вычисляется оценка градиента в окрестности точки m(d) и находится направление движения к экстремуму.
Применение метода прямого поиска по описанному сценарию на
практике встречается крайне редко, т. к. в процессе поиска алгоритм может либо «пропустить» экстремум (пробные шаги недопустимо велики),
либо сходимость может быть очень медленной (пробные шаги недопустимо малы). Этот недостаток связан с тем, что в алгоритме нет информации о выборе шага. Кроме того, погрешности измерения при «пологой»
форме функции могут исказить улучшающее направление (и алгоритм
вообще не будет сходиться).
Поэтому чаще всего используют адаптивные методы прямого поиска.
Их сущность сводится к тому, что используется информация о форме функции вблизи траектории движения к экстремуму, чтобы результаты прошлых
итераций использовались для корректировки шага на текущей итерации.
Сущность идеи адаптации алгоритма, предложенной Хуком и
Дживсом [39, 53, 61]:
если предыдущий шаг привел к улучшению функции, следующий
шаг увеличивается, движение к экстремуму ускоряется;
если предыдущий шаг привел к ухудшению функции, корректируется направление движения и длина шага берется с предыдущей итерации;
если при пробных движениях во всех направлениях функция
ухудшается (признак попадания в окрестность экстремума), то при недостигнутой заданной точности определения экстремума, уменьшается величина шага и процесс поиска повторяется, в противном случае поиск завершается.
Величина шага является настраиваемым значением в алгоритме поиска и может изменяться различными способами (например, значение
шага может выбираться по формуле m ( d 1) m ( d ) e w , где w – число неудачных попыток определить улучшающее направление в последовательности итераций или кратным двум – в случае удачного направления в два
раза больше, в случае неудачного – в два раза меньше).
Представляет интерес ускорение алгоритма. В классической форме
алгоритм Хука-Дживса не может быть эффективно распараллелен. Однако можно отказаться от движения к экстремуму после каждого «удачного»
приращения аргумента и, вместо этого, определить оценку градиента в
текущей точке. При этом определение реакции САУ на приращение каждого из аргументов может быть выполнено параллельно. Распараллеливание, вызывающее, с одной стороны, ускорение отдельных этапов алгоритма, требует, с другой стороны, затрат ресурсов на координацию (в
данном случае – на согласование оценки градиента). Представляет инте69
рес количественная оценка снижения ИЗ благодаря параллелизму. Подробно этот вопрос исследован в главе 4.
Генетический алгоритм (ГА), является самым известным на данный
момент представителем эволюционных алгоритмов. Одним из важных
применений ГА является нахождение глобального экстремума функции
v-независимых переменных [25], например, для настройки ПИДрегулятора [84, 88, 91]. Проведем соотнесение физического смысла биологических терминов, которыми традиционно оперируют ГА с терминами теории управления: популяция – совокупность параметров регулятора;
индивидуум популяции – параметр регулятора; хромосома – значение параметра регулятора; естественный отбор – выбор наилучшего значения
функции; поколение – итерация расчетов; генетические операторы (мутация, кроссовер, инверсия), рекомбинация хромосом – процессы формирования новых значений параметров регулятора, функция пригодности –
целевая функция, у которой ищется экстремум.
Начало
Итерация = 0
Формирование значений совокупности параметров регулятора
Вычисление целевой функции
Достигнуто ли требуемое
значение?
Нет
Да
Конец
Итерация = Итерация + 1
Формирование новых значений параметров регулятора, путем применения
генетических операторов к различным
парам значений параметров
Вычисление целевой функции
Рис. 19. Блок-схема работы генетического алгоритма.
70
Схематично работу ГА можно представить в виде блок-схемы
(рис. 19). Сущность его шагов заключается в следующем:
выбирается произвольная точка начального приближения m(0) целевой функции f(m) векторного аргумента m = [m1, m2, ... mv]Т;
процесс поиска экстремума организуется как итеративный.
Каждый d-й шаг итеративного процесса представляет собой следующие действия:
определяется значение целевой функции, если достигнуто требуемое значение, то процесс останавливается;
формируется новая совокупность параметров регулятора, путем выбора наилучших значений, состоящая из h значений наборов параметров
(существуют варианты ГА с постоянным и переменным числом h);
в новой совокупности группируются значения параметров регулятора (обычно выбираются комбинации по два значения для применения
генетических операторов, в ГА это называется «панмиксией», хотя можно объединять и больше значений параметров);
к каждой группе параметров применяется последовательность генетических операторов (порядок и параметры которых являются настроечными в генетических алгоритмах):
1) кроссовер генерирует новое значение, объединяя значения «родительских» параметров. Существует несколько вариантов кроссовера.
Наиболее простым является одноточечный кроссовер – берутся два значения параметра, и «перерезается» их двоичное представление в случайно
выбранном бите (рис. 20). Результирующее значение получается из начала
одного и конца другого значений (иногда получают два значения). Для
многоточечного кроссовера получают несколько значений параметра.
2)
010101110
10101
101011101
101011101
01111
10101
Рис. 20. Пример одноточечного кроссовера для двух значений параметра.
3) мутация представляет собой случайное изменение значения параметра (обычно простым изменением значения одного или нескольких из
битов на противоположное, количество меняемых бит является параметром ГА). Данный оператор (рис. 21) позволяет ГА, с одной стороны,
быстро находить локальные экстремумы, с другой стороны, не зациклиться в локальном экстремуме. Для выхода из локального экстремума
иногда применяют макромутацию [25], сущность которой заключается в
изменении сразу всех бит через какое-то количество итераций.
71
4)
1010110011010
1
1010111011010
1
Рис. 21. Пример одноточечной мутации значения параметра.
5) инверсия (рис. 22) изменяет порядок бит в значении параметра путем их циклической перестановки (размер цикла является параметром ГА).
Многие модификации ГА обходятся без данного генетического оператора.
6)
1010111011010
1
0101101011101
1
Рис. 22. Пример четырехбитовой инверсии.
При однопроцессорной реализации переборные алгоритмы требуют
б льших затрат ресурсов, чем критериальные. Но генетические алгоритмы допускают гораздо более эффективное распараллеливание (достаточно распределить между элементами распределенной вычислительной
системы непересекающиеся подмножества значений настраиваемых параметров). Поэтому при использовании техники распределенных вычислений генетические алгоритмы могут привести к меньшим ИЗ, чем поисковые. Подробно эти вопросы исследованы в главе 4.
Замечания.
1. Существуют реализации ГА, когда выбор наилучших значений
происходит после создания новых значений на следующей итерации, т.
е. среди «родительских» и «дочерних» значений параметров [25].
2. Сходимость ГА к решению зависит от начального набора значений. Для ускорения сходимости начальный набор значений строят с максимальным разнообразием [25, 80].
Алгоритмы настройки параметров ПИД-регулятора Хука-Дживса и
генетический реализованы в программном комплексе для гетерогенных
распределенных вычислительных систем, разработанном на языке Java.
Для проведения исследований в программном комплексе имеется возможность задания различных параметров данных алгоритмов (начальной
точки, параметров генетических операторов). Структура программного
комплекса и результаты исследований приведены в главе 4.
2.4. Выводы
1. Предложены способы оценки информационного запаздывания, вносимого в систему управления техническими средствами с ограниченными
возможностями на этапе анализа и синтеза алгоритмов управления.
72
2. Разработана система показателей качества и характеристик алгоритмов, позволяющая сопоставить различные варианты алгоритмов и их структуры организации с учетом вносимого ими информационного запаздывания.
3. Получены оценки вычислительной сложности различных алгоритмов управления многомерными объектами, в том числе: ряда вариантов
алгоритма, синтезированного методами аналитического конструирования
оптимальных регуляторов; пропорционально-интегрально-дифференциального алгоритма управления с двумя вариантами адаптации параметров
(на основе поиска экстремума показателя качества в пространстве
настроечных параметров и на основе применения эволюционных методов
улучшения настроек).
73
3. МОДЕЛИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ С ИНФОРМАЦИОННЫМ
ЗАПАЗДЫВАНИЕМ
Содержание главы составляют результаты вычислительных экспериментов с моделями дискретных динамических САУ с информационным запаздыванием, выполненных на разработанном для этих целей программном комплексе, структура и функции которого описаны в п. 1.4
главы 1. Общая цель вычислительных экспериментов – подтвердить теоретические положения о новых свойствах САУ с ИЗ, описанных в главе 1. Проведенные исследования служат основой для выработки методики обоснования решений по алгоритмическому и информационному
обеспечению САУ с учетом ИЗ.
3.1. Перечень и характеристика вычислительных экспериментов для
исследования систем управления динамическими объектами с учетом
ограниченности ресурсов технических средств
Как отмечалось в главе 1, программный комплекс для исследования
САУ с ИЗ содержит генератор моделей объекта (с возможностью изменения размерности пространства состояний и управляющих воздействий)
и легко пополняемые библиотеки показателей качества и алгоритмов
управления. По естественным причинам невозможно охватить все варианты алгоритмов и их модификаций, поэтому в данной главе исследуются только два класса алгоритмов, представляющих полярные тенденции в
создании алгоритмического обеспечения. Алгоритмы, относящиеся к
первому классу (популярные в теоретических работах) синтезированы
методами аналитического конструирования оптимальных регуляторов,
АКОР (описаны в п. 2.3 главы 2). Алгоритмы этого класса совершенны,
но вычислительно сложны, в связи с чем они вносят заметное ИЗ в САУ,
снижающее своевременность управления. Алгоритмы, относящиеся ко
второму классу (популярные в инженерных и проектных разработках) базируются на использовании дискретного пропорционально-интегральнодифференциального (ПИД) закона. Такие алгоритмы не являются наукоемкими и их вычислительная сложность очень мала, поэтому снижения
своевременности управления не происходит. Сопоставление этих классов
алгоритмов в среде, учитывающей влияние вносимого ими существенно
различного информационного запаздывания, позволяет определить (методом моделирования), какой из классов алгоритмов обеспечит более высокое качество управления при заданных характеристиках цифровых
средств управления (ресурсах памяти, быстродействия, разрядности).
74
Перечислим постановки задач вычислительных экспериментов, выполненных с алгоритмами указанных классов, и перечень исследованных
эффектов, связанных с ИЗ.
1. Исследование зависимости значений показателей качества управления (2.10–2.28), достижимых при управлении многомерным объектом с
помощью алгоритма, синтезированного методами АКОР (2.31– 2.40), в
зависимости от размерности задачи как параметра. Обнаруживается предел усложнения структуры управления, вне которого эффект улучшения
качества благодаря более точной модели уничтожается несвоевременностью управляющих воздействий.
2. Оценка целесообразности учета ИЗ на этапе синтеза алгоритма
АКОР (методом расширения размерности пространства состояний, описанным в п. 2.1.1). Обнаруживаются эффекты отсутствия сходимости процесса расширения размерности и наличия предела, вне которого выигрыш
в точности оптимизационного алгоритма в расширенном пространстве
становится меньше, чем выигрыш в своевременности управления при использовании более простых алгоритмов (алгоритма АКОР, синтезированного без учета ИЗ, и ПИД-регулятора).
3. Выявление эффективности алгоритма АКОР по сравнению с типовым ПИД-законом управления на различных объектах управления и задающих воздействиях, основным параметром при этом является размерность
объекта управления. Обнаруживается эффект существования предела точности описания процесса в объекте, выход за который приводит к потере
преимуществ алгоритма АКОР перед простым ПИД-алгоритмом.
4. Оценка качества управления алгоритмами, синтезированными методами АКОР, и типовым ПИД-законом управления на различных показателях качества (2.10–2.28) для различных параметров системы управления и характеристик объекта, в частности: исследование качества воспроизведения переменного во времени задающего воздействия; исследование качества работы системы при входном возмущении, переменном во
времени (но известном заранее); исследование чувствительности систем
к отклонениям параметров объекта от расчетных значений; проверка
возможности достичь заданных значений переменных состояния из заданных начальных условий за один такт (для системы управления с оптимальным алгоритмом, синтезированным методами АКОР). Обнаруживается эффект потери преимуществ алгоритма АКОР перед ПИДалгоритмом при усложнении информационного обеспечения.
5. Изучение преимуществ, предоставляемых современными методами
распараллеливанием алгоритмов обработки информации и управления, для
повышения качества управления в замкнутых САУ. В связи с новизной и
малой изученностью использования распараллеливания в САУ данная задача рассмотрена более подробно (вынесена в главу 4).
75
3.1.1. Методика проведения вычислительных экспериментов
До начала экспериментов необходимо установить все параметры системы управления в стартовое состояние. Стартовым состоянием назовем следующие значения матриц и параметров системы управления:
размерность вектора состояний – 4;
размерность вектора управлений – 2;
число тактов управления – 11;
число тактов запаздывания – 0;
1
0
0
0
1 0.5
1
0
1 0.7
0
0
1
0
A
, B
, K
0
0.4 0.2
0
0
0
1
0.04 0.004 0.3 0.1
0 0.3
0
5
2
0
0.02
0 0 0 0
R
, X [0] , Uz
0
0.02
0
0 0 0 0
3
10
10
10
10
10
10
10
10 10 10 10 10 10 10
F
20
20
20
20
20
20
20
60
60
60
60
60
60
60
10 10 10 10 10 10 10 10 10 10
0 0 0 0 0 0 0 0 0 0
Xz
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0
1
0
1 0 0
, Q
0
0 1 0
0 0 1
0
0 0 0
1 0 0
,
0 1 0
0 0 1
0 0 0 0 0 0 0 0
,
0 0 0 0 0 0 0 0
10
10
,
20
20
20
20
60 60 60 60
10 10
0 0
10
, U max .
0 0
10
0 0
10
10
10
10
10
10
Матрица А содержит параметры объекта, B определяет параметры
канала выдачи управляющих воздействий на объект управления. Матрицы К, Q, R относятся к алгоритму АКОР и являются соответственно: матрицей штрафов за отклонение состояний в конце процесса; матрицей
штрафов за отклонения состояний в течение процесса управления; матрицей штрафов за управления, отличающиеся от номинальных. Матрицастолбец X[0] – начальные значения переменных состояния (на нулевом
такте управления). Матрица-столбец F – возмущения, поступающие на
вход объекта управления. Матрица Xz – задающие значения для переменных состояния. Матрица Uz – номинальные значения управлений. Матрица Umax – максимально допустимые значения управлений.
Базовые значения параметров технических средств:
быстродействие вычислительных средств равно 6000 операциям типа
«сложение», «умножение» и 100 операциям типа «деление», «сравнение» и
10000 операциям типа «перемещение» за один такт управления;
быстродействие и разрядность канала передачи вектора переменных состояния позволяет передать семь значений, а канал выдачи управляющих воздействий четыре значения за один такт управления;
76
объем памяти составляет 1400 чисел повышенной точности.
Для проведения экспериментов по изучению зависимости показателей качества от рассматриваемого параметра необходимо исследовать
САУ с различными значениями перечисленных параметров, причем многие из них могут быть изменяющимися во времени. Предлагается схема
вариаций параметров, показанная на рис. 23. По данной схеме изменение
хотя бы одного параметра системы приводит к 372 вычислительным экспериментам. Вручную такое количество экспериментов провести невозможно. Поэтому для проведения экспериментов в состав разработанного
программного комплекса были включены средства автоматизации экспериментов и автоматической обработки их результатов. Подробное описание программного комплекса приведено в п. 3.2.
Таким образом, методика проведения вычислительных экспериментов содержит следующие позиции:
установка параметров системы управления в стартовое состояние
(или состояние, заданное проектировщиком системы);
выбор отслеживаемого показателя качества (или группы показателей
качества) из (2.10–2.28) с учетом рассматриваемого процесса управления;
настройка системы управления путем подбора параметров регулятора (как в ручном режиме, так и в режиме автоматической настройки алгоритмом Хука-Дживса или генетическим алгоритмом);
изменение значений исследуемого параметра для определенного
подмножества вычислительных экспериментов (см. рис. 23) с фиксацией
значений показателей качества.
ЛИНЕЙНЫЕ ОБЪЕКТЫ УПРАВЛЕНИЯ
Устойчивые объекты
Ступенчатое задающее воздействие
Неустойчивые объекты
Переменное задающее воздействие
Запаздывание в канале передачи переменных состояния объекта;
Запаздывание в канале выдачи управляющих воздействий;
Дрейф параметров объекта управления;
Помехи в канале передачи переменных состояния объекта;
Помехи в канале выдачи управляющих воздействий;
Возмущающие воздействия на входе объекта управления;
Ограничение на величину управляющего воздействия;
Ограничение параметров технических средств.
Рис. 23. Схема вариации параметров системы управления для проведения вычислительных
экспериментов.
77
Данная методика ниже излагается более подробно в ходе описания
конкретных серий экспериментов.
3.2. Программный комплекс для автоматизации исследования
систем управления динамическими объектами при ограниченности
ресурсов технических средств
3.2.1. Требования к программному комплексу
Определим функции, которыми должен обладать программный комплекс
для проведения вычислительных экспериментов, аннотированных в п. 3.1:
задание основных параметров задачи управления: числа переменных состояния, управляющих воздействий, тактов управления (или времени управления и интервала дискретизации);
задание величин информационного запаздывания в каналах передачи информации и величины информационного запаздывания, вносимого в систему управления расчетными процедурами, в тактах управления
(или времени процесса передачи информации и параметров технических
средств реализации алгоритмов управления);
задание параметров системы управления: матриц параметров объекта управления, параметров канала выдачи управляющих воздействий,
возмущающих воздействий, задающих воздействий, ограничений на величину управляющих воздействий, штрафов за отклонения переменных состояния от заданных значений, штрафов за отклонения управляюих воздействий от номинальных значений;
расчет значений управляющих воздействий и переменных состояний в течение всего процесса управления для различных вычислительных
схем алгоритма, синтезированного методами АКОР (2.31–2.40), и ПИДзакона управления с учетом заданных параметров;
расчет показателей качества и характеристик алгоритмов управления по формулам (2.5–2.28);
расчет квадратического критерия задачи АКОР (фактическое и
теоретическое значения);
запись показателей качества в файл (для обеспечения возможности их последующей обработки в других программах, например, в Microsoft Excel) и построение графиков процесса управления (переходных
процессов, управляющих воздействий, зависимостей показателей качества от варьируемых значений);
упрощение проведения исследований с помощью программного
комплекса по некоторым экспериментам (их полная автоматизация).
78
3.2.2. Структура программного комплекса
Программный комплекс для проведения имитационного моделирования дискретных систем управления динамическими объектами реализован
на языке Visual Basic. При разработке комплекса использована технология
унифицированного процесса проектирования фирмы Rational Software (Rational Unified Process), разработанная Г. Бучем [9, 62, 87] с применением
объектно-ориентированного подхода [75, 76] к компонентной модели программного обеспечения [70]. В качестве основного языка описания компонентов программного комплекса использовался унифицированный язык
моделирования UML (Unified Modeling Language) [9, 81].
Все компоненты, выполняющие расчеты, были тщательно оттестированы, и результаты их работы согласовывались с результатами, получаемыми
с помощью коммерческих математических пакетов, таких как MathCAD 2001
и Maple V.
Общая функциональная схема разработанного программного комплекса приведена на рис. 24.
Компонент ввода
данных
Компонент вывода
данных
Компонент автоматизации исследований
Компонент управления интерфейсом
Компонент расчета
показателей качества
Компонент управления
расчетом задачи
Компонент матричных операций
Компонент построения
графиков
Компонент подготовки данных для расчета задачи управления
Компонент расчета одного такта задачи управления
Компонент расчета параметров регулятора
Компонент настройки параметров регулятора
Рис. 24. Функциональная схема программного комплекса.
Компонент управления интерфейсом включается в себя:
1. Методы обработки нажатий команд меню программного комплекса.
2. Методы обработки событий панели инструментов.
3. Методы управления окнами и обработки их событий.
79
Выходом данного компонента является следующая информация:
начальные параметры задачи управления (в компоненты автоматизации исследований и управления расчетом задачи);
имя файла и его тип (для компонента ввода данных);
значения отслеживаемых показателей качества (в компонент вывода
данных);
значения отслеживаемых показателей качества, переменных состояний и управляющих воздействий, а также параметры регулятора (для
компонента построения графиков).
Входной информацией данного компонента являются:
начальные данные задачи из файла (из компонента ввода данных)
или от пользователя;
рассчитанные показатели качества и значения переменных состояния, значения управлений, параметры регуляторов от компонентов автоматизации исследований и управления расчетом задачи.
Компонент ввода данных включает в себя:
1. Функции отображения начальных данных.
2. Функции ввода данных от пользователя.
3. Функции считывания данных из файла и их анализ.
Выходной информацией данного компонента являются:
начальные данные об исследуемой системе управления (в компонент управления интерфейсом), которые представлены числом переменных состояния, управляющих воздействий, тактов управления, матрицами А, В, F, R, Q, K, см. формулы (2.29), (2.30), (2.31), матрицы задающих
и возмущающих воздействий, матрица с номинальными значениями
управлений, вектор с начальным состоянием, параметры технических
средств реализации системы управления, значения информационных запаздываний или временные характеристики каналов передачи и вычислительных средств.
В данный компонент передается имя и тип файла, в котором находятся начальные данные (при запросе данных с диска).
Компонент вывода данных включает в себя функции вывода показателей качества и характеристик системы управления (см. формулы (2.5–2.28)).
В данный модуль передается информация о значениях показателей
качества и характеристиках системы управления (оценка вычислительной
сложности, требований к объему памяти).
Компонент построения графиков включает в себя:
1. Функцию построения графика динамики переменных состояния и
задающих воздействий.
2. Функцию построения графика динамики изменения управляющих
воздействий и номинальных значений.
80
3. Функцию построения графика динамики изменения параметров
регулятора.
4. Функцию построения графика динамики изменения показателей
качества (для автоматизированных исследований).
В данный компонент передается информация о параметрах регулятора, об управляющих воздействиях, о переменных состояния и о показателях качества на всех тактах процесса управления.
Компонент управления расчетом задачи включает в себя:
1. Функцию вызова компонента подготовки данных для расчета
задачи управления.
2. Цикл вызовов (по числу тактов управления) компонента расчета
параметров регулятора.
3. Цикл вызовов (по числу тактов измерения переменных состояния
объекта управления) компонента расчета одного такта задачи управления.
4. Функцию вызова компонента расчета значений показателей качества.
В данный компонент передается информация о начальных данных задачи управления (от компонента управления интерфейсом) и информация о
дополнительных матрицах (необходимых для расчета) из компонента подготовки данных для задачи. Выходом данного компонента являются:
показатели качества (в компонент управления интерфейсом).
часть начальных данных (матрицы начальных состояний, матрицы
возмущений и заданий) в компонент подготовки данных для задачи
управления.
значения переменных состояния и управляющих воздействий, нормирующие значения управления в компонент расчета показателей качества.
начальные данные задачи в компонент расчета одного такта
задачи управления.
Компонент расчета показателей качества содержит функции
расчета показателей качества (2.10–2.28) и вычислительных характеристик алгоритма управления (2.5–2.9).
В данный компонент поступает информация о значениях переменных состояния и управляющих воздействиях на всех тактах управления, а
также информация о номинальных значениях управлений и параметры
задачи управления. Выходом данного компонента являются значения показателей качества и характеристик алгоритма управления.
Компонент подготовки данных для расчета задачи управления
содержит:
1. Функции формирования значений матриц возмущений, заданий и помех, а также выделение из матриц необходимых элементов для каждого такта управления.
81
2. Функции формирования по параметрам задачи управления дополнительных матриц, необходимых для проведения расчетов.
В данный компонент входит информация о матрицах возмущения и
задающих воздействиях (от компонента управления расчетом задачи
управления). Выходом данного компонента являются дополнительные
матрицы (в компонент управления расчетом задачи управления).
Компонент матричных операций содержит стандартные алгоритмы матричной алгебры (умножение, обращение, сложение, вычитание, умножение на скаляр, транспонирование, создание единичной матрицы, присваивание матриц).
Входом этого компонента являются матрицы и их параметры, поступающие от компонентов расчета одного такта задачи управления и расчета
параметров регулятора, выходом является результирующая матрица.
Компонент автоматизации исследований содержит такие же элементы, как и компонент управления расчетом задачи, а также собственные информационные каналы обмена с другими компонентами. Однако
он отличается наличием функции запроса параметров исследования (через компонент управления интерфейсом) у пользователя, наличием собственной графической процедуры и процедуры планирования экспериментов. Кроме того, он имеет связь с компонентом настройки параметров регулятора через компонент расчета показателей качества.
Компонент настройки параметров регулятора реализует алгоритм поиска экстремума функции Хука-Дживса и генетический алгоритм.
Входной информацией является индекс настраиваемого показателя качества и параметры задачи управления (включая параметры регулятора).
Выходной информацией являются параметры регулятора.
3.3. Основные результаты исследований систем управления
динамическими объектами при ограниченных
ресурсах технических средств
3.3.1. Группа вычислительных экспериментов № 1
Тема экспериментов: исследование зависимости значений показателей качества управления (2.10–2.28), достижимого при управлении многомерным объектом с помощью алгоритма, синтезированного методами АКОР (2.31–2.40), в зависимости от размерности задачи как параметра. Информационное запаздывание, вносимое техническими средствами и вычислительными процедурами, учитывается на этапе
синтеза алгоритма управления.
Вопросы, подлежащие изучению:
Как сказывается влияние информационного запаздывания, учитываемого на этапе синтеза алгоритма управления, на значения показателей каче82
ства при ограниченности параметров технических средств реализации?
Как сказывается влияние части величины информационного запаздывания, не учтенной на этапе проектирования алгоритма управления, на
значения показателей качества при ограниченных ресурсах параметров
технических средств для их реализации?
Как сказывается рост размерности задачи управления по числу переменных состояния и по числу управляющих воздействий на значения показателей качества при ограничениях параметров технических средств?
Как сказывается рост размерности задачи управления по числу
управляющих воздействий на значения показателей качества?
Как сказывается рост размерности задачи управления по числу
тактов управления на значения показателей качества?
Проведены следующие исследования:
Эксперимент 1: влияние учитываемого информационного запаздывания на качество управления при ограниченных параметрах технических средств.
Согласно методике, описанной в п. 3.1.1, устанавливают параметры
системы в стартовое состояние. Выбирают показатель качества из формул (2.10–2.28). Настраивают систему управления на наилучшее значение данного показателя. Варьируют значение учитываемого информационного запаздывания в пределах от одного до шести тактов. При достижении предела вычислительных параметров технических средств значение
учитываемого информационного запаздывания прекращают увеличивать.
Значения показателя качества фиксируют в таблице. Эксперимент повторяется для других показателей качества и параметров системы управления.
Эксперимент 2: влияние части неучитываемого информационного запаздывания на качество управления при ограниченных параметрах технических средств.
Данный эксперимент проводят аналогично эксперименту № 1, только при достижении предела вычислительных параметров технических
средств значение учитываемого информационного запаздывания продолжают увеличивать, вводя в систему неучитываемое информационное
запаздывание равное ближайшему целому числу тактов, за которое вычислительные средства произведут расчет управляющих воздействий для
рассматриваемой системы управления. Эксперимент повторяется для
других показателей качества и параметров системы управления.
Эксперимент 3: влияние роста числа переменных состояния на качество управления при ограниченных параметрах технических средств.
Варьируется размерность задачи управления по числу переменных
состояния от четырех до пятнадцати. При достижении предела вычислительных параметров технических средств в систему вводится неучитыва83
емое информационное запаздывание, равное ближайшему целому числу
тактов, за которое вычислительные средства произведут расчет управляющих воздействий для рассматриваемой системы управления. Эксперимент повторяется для разных показателей качества и параметров системы
управления.
Эксперимент 4: влияние роста числа управляющих воздействий на
качество управления при ограниченных параметрах технических средств.
Проводится аналогично эксперименту № 3, только варьируемым параметром является размерность задачи управления по числу управляющих воздействий от двух до пятнадцати.
Эксперимент 5: влияние роста числа тактов управления на качество управления при ограниченных параметрах технических средств.
Данный эксперимент позволяет найти зависимость значений показателей качества от точности рассматриваемого «информационного образа» системы управления (влияние интервала дискретизации). Проводится
аналогично эксперименту № 3, только варьируемым параметром является
размерность задачи управления по числу тактов управления от 10 до 390
с шагом 50.
Из-за естественных ограничений по объему описаний приведем
только некоторые типичные результаты.
Исследовался алгоритм, синтезированный методами АКОР, с предварительным расчетом параметров регулятора и хранением их в памяти.
На рис. 25 приведена зависимость среднеквадратических отклонений
одной из переменных состояния от заданных значений в функции информационного запаздывания.
.
180
Значение СКО, %
160
140
120
Без учета
100
80
С учетом
60
40
20
0
0
1
2
3
4
5
Число тактов запаздывания
Рис. 25. Влияние числа тактов запаздывания на среднеквадратическое отклонение переменной состояния от заданного значения для систем управления, синтезированных с учетом
информационного запаздывания и без его учета.
84
Начальная часть зависимости рис. 25 соответствует области изменения размерности задачи, в которой учет информационного запаздывания
позволяет улучшить качество управления по сравнению с достижимым в
САУ, синтезированной без учета ограниченности ресурсов ЭВМ. При
дальнейшем росте размерности качество САУ, синтезированной с учетом
запаздывания, проигрывает по сравнению с достижимым при использовании неоптимальной, но более оперативной САУ, поскольку рост размерности задачи управления вносит дополнительное неучтенное информационное запаздывание.
В табл. 10 жирным начертанием выделена строка, соответствующая
трем тактам учитываемого запаздывания, при котором алгоритм управления превысил вычислительные возможности техники реализации, вследствие чего появилось неучитываемое информационное запаздывание.
На рис. 26 приведена зависимость среднеквадратических отклонений
одной из переменных состояния от заданных значений в функции информационного запаздывания при учете ограниченности ресурсов технических средств. Стартовые параметры технических средств позволяли реализовать САУ с восьмью переменными состояния и двумя управляющими
воздействиями, параметры каналов передачи информации и объем памяти
считались не лимитированными. Начальная часть зависимости рис. 26
соответствует тенденции, наблюдаемой на рис. 25 (на графике эффект
уточнения незаметен из-за фактора масштаба). Однако хорошо видно, что
при дальнейшем росте информационного запаздывания качество САУ, синтезированной с учетом запаздывания, проигрывает по сравнению с достижимым в системе, синтезированной без учета запаздывания.
600
Значение СКО, %
500
400
С учетом
300
Без учета
200
100
0
0
1
2
3
4
5
Число тактов запаздывания
Рис. 26. Влияние числа тактов запаздывания на среднеквадратическое отклонение переменной состояния от заданного значения для систем управления, синтезированных с учетом
информационного запаздывания и без его учета.
85
В табл. 10 приведено количество операций, необходимых для организации вычислений в системе управления с учетом информационного запаздывания (количество операций типа «умножение» чуть меньше чем
сложений, а число делений и сравнений очень мало, поэтому данные типы операций не представлены в таблице, см. также п. 2.3.5).
Таблица 10
Количество операций для организации вычислений
Число тактов
учитываемого
запаздывания
0
1
2
3
4
5
6
Размерность
задачи по
числу
состояний
4
6
8
10
12
14
16
Число
Число
Число тактов
операций
операций
дополнительного
типа
типа
запаздывания
«сложение» «перемещение»
10824
18458
0
29568
43648
0
63712
86262
0
118008
151052
1
197208
242770
3
306064
366168
5
449328
525998
7
Если же учитывать ограничения технических средств не только по
быстродействию, но и по объему памяти и разрядности каналов передачи
информации, то можно получить значения информационного запаздывания
с учетом ограничений всех технических средств, представленные в табл. 11.
Таблица 11
Информационное запаздывание, вносимое различными
параметрами технических средств
Число тактов
учитываемого
запаздывания
Размерность
задачи по
числу состояний
Объем необходимой памяти, кол-во
элементов
0
1
2
3
4
5
6
4
6
8
10
12
14
16
633
1203
1957
2895
4017
5323
6813
Число тактов
дополнительного
запаздывания по
объему памяти
0
0
0
1
2
2
3
Число тактов
дополнительного
запаздывания по
разрядности
технических
средств
0
0
0
1
1
1
2
В табл. 11 жирным начертанием выделена строка, соответствующая
трем тактам учитываемого запаздывания, при котором алгоритм управления превысил вычислительные возможности техники реализации, вследствие чего появилось неучитываемое информационное запаздывание. Если учесть дополнительное информационное запаздывание, возникающее
86
из-за ограниченности быстродействия (см. табл. 10), то совокупное запаздывание из-за ограниченности всех параметров технических средств
будет достаточно большим (табл. 12).
Таблица 12
Дополнительное информационное запаздывание
Размерность задачи по числу
состояний
Число
тактов
учитываемого запаздывания
4
6
8
10
12
14
16
0
1
2
3
4
5
6
Число тактов дополнительного
запаздывания
по быстродействию
по объему памяти
по разрядности технических средств
0
0
0
1
3
5
7
0
0
0
1
2
2
3
0
0
0
1
1
1
2
Всего тактов дополнительного
запаздывания
0
0
0
3
6
8
10
График зависимости показателя качества от величины учитываемого
и неучитываемого информационного запаздывания приведен на рис. 27.
Значение СКО, %
1000
800
С учетом
600
400
Без учета
200
0
0
1
2
3
4
5
Число тактов запаздывания
Рис. 27. Влияние числа тактов запаздывания на среднеквадратическое отклонение переменной
состояния от заданного значения для систем управления, синтезированных с учетом информационного запаздывания, вносимого всеми техническими средствами и без его учета.
Кривые, относящиеся к алгоритмам управления, синтезированным с
учетом информационного запаздывания, на рис. 25, 26, 27 можно также
рассматривать как зависимости показателей качества от роста размерности задачи управления при наличии информационного запаздывания и
ограничениях параметров технических средств.
87
3.3.2. Группа вычислительных экспериментов № 2
Тема экспериментов: выявление области применения оптимальных
алгоритмов при наличии информационного запаздывания, неучтенного
при формировании законов управления, путем сравнения достижимого
качества управления алгоритмом, синтезированным методами АКОР, и
типовым ПИД-законом управления.
Вопросы, подлежащие изучению:
Как сказывается влияние неучитываемого информационного запаздывания на значения показателей качества при ограниченных параметрах
технических средств реализации для алгоритма управления, синтезированного методами АКОР, и типовым ПИД-законом управления?
Как сказывается изменение параметров объекта управления (дрейф
параметров) при влиянии неучитываемого информационного запаздывания
на значения показателей качества при ограниченных параметрах технических средств реализации для алгоритма управления, синтезированного методами АКОР, и типовым ПИД-законом управления?
Эксперимент 1: влияние неучитываемого информационного запаздывания на качество управления алгоритмом АКОР и ПИДрегулятором.
Варьируется величина информационного запаздывания, которое не
учитывается на этапе синтеза алгоритма управления от одного до шести
тактов в системах управления с оптимальным регулятором, синтезированным методами АКОР, и ПИД-регулятором. Эксперимент повторяется
для разных показателей качества и параметров системы управления.
Определенный интерес представляют системы с объектами управления
на границе устойчивости.
Эксперимент 2: влияние дрейфа параметров объекта управления
на качество управления алгоритмом, синтезированным методами
АКОР, и ПИД-регулятором при наличии неучитываемого информационного запаздывания.
Плавно варьируются параметры объекта в процессе управления в
пределах 10 % от первоначальных значений. Эксперимент повторяется
для разных показателей качества и параметров системы управления.
Приведем наиболее характерные результаты по вычислительным
экспериментам этой группы.
Исследовались алгоритмы управления, синтезированные методами
АКОР (с предварительным расчетом параметров регулятора и хранением
их в памяти), и алгоритмы на базе типового ПИД-закона управления. В
системе управления моделировалось информационное запаздывание, которое не учитывалось на этапе синтеза алгоритма управления. Как видно
из рис. 28, алгоритм АКОР теряет оптимальность из-за информационного
88
запаздывания, неучтенного на этапе синтеза, и в конечном итоге может
привести к худшим значениям показателей качества, чем ПИД-регулятор.
Исследовалось влияние дрейфа параметров объекта на область применения оптимальных систем с алгоритмами управления, синтезированными методами АКОР, в сравнении с системами управления с типовыми
ПИД-регуляторами. При росте отклонения параметров объекта от точных
значений имеется область (до 5 %–15 % отклонений от первоначальных
значений), когда оптимальная система управления доставляет лучшие
значения для настроенных показателей качества (рис. 29), чем неоптимальная система управления. Однако, с ростом отклонений параметров
объекта (более 15 % отклонений от первоначальных значений, без учета
их в настройках системы) появляется область, когда оптимальная система
управления дает худшие значения показателей качества, по сравнению с
неоптимальной системой (рис. 29). Это связано, прежде всего, с высокой
чувствительностью системы, синтезированной методами АКОР, к параметрам объекта и малой чувствительностью ПИД-закона управления (по
сравнению с АКОР).
Значение СКО, %
250
200
Алгоритм АКОР
150
Алгоритм
ПИД
100
50
0
0
1
2
3
4
5
Число тактов запаздывания
Рис. 28. Потеря оптимальности алгоритма АКОР по сравнению с ПИД-регулятором в зависимости от числа тактов информационного запаздывания на показателе среднеквадратического отклонения переменной состояния от заданного значения.
89
90
Значение СКО, %
Алгоритм АКОР
70
50
30
Алгоритм ПИД
10
0
0.00%
5.00%
10.00%
15.00%
20.00%
25.00%
30.00%
35.00%
Отклонение параметра объекта
Рис. 29. Область применения систем управления (определяются по наилучшему значению
показателя качества управления – среднеквадратическому отклонению переменной состояния) в зависимости от отклонения параметра объекта.
3.3.3. Группа вычислительных экспериментов № 3
Тема экспериментов: выявление эффективности алгоритма АКОР
по сравнению с типовым ПИД-законом управления на различных объектах управления и задающих воздействиях, основным параметром при
этом является размерность объекта управления.
Вопросы, подлежащие изучению:
Как сказывается рост размерности задачи управления по числу переменных состояния и по числу управляющих воздействий на значения
показателей качества при ограниченных параметрах технических средств
реализации для алгоритма управления, синтезированного методами
АКОР, и типовым ПИД-законом управления?
Как сказывается рост числа тактов управления (уменьшение интервала дискретизации непрерывного времени) на значения показателей
качества при ограниченных параметрах технических средств реализации
для алгоритма управления, синтезированного методами АКОР, и типовым ПИД-законом управления?
Как сказывается рост размерности задачи управления по числу тактов
управления на значения показателей качества при ограничениях параметров
технических средств реализации для алгоритма управления, синтезированного методами АКОР, и типовым ПИД-законом управления?
Эксперимент 1: влияние роста размерности задачи управления по
числу переменных состояния на качество управления алгоритмом
АКОР и ПИД-регулятором.
90
Варьируется размерность задачи по числу переменных состояния от
четырех до десяти. Фиксируется выбранный показатель качества управления. Эксперимент повторяется для разных показателей качества и параметров системы управления.
Эксперимент 2: влияние роста размерности задачи управления по
числу управляющих воздействий на качество управления алгоритмом
АКОР и ПИД-регулятором.
Варьируется размерность задачи по числу управляющих воздействий
от двух до десяти. Фиксируется выбранный показатель качества управления. Эксперимент повторяется для разных показателей качества и параметров системы управления.
Эксперимент 3: влияние роста числа тактов управления (уменьшения интервала дискретизации непрерывного времени) на качество
управления алгоритмом АКОР и ПИД-регулятором.
Варьируется размерность задачи по степени приближения информационного образа системы управления к непрерывной модели, путем
уменьшения интервала дискретизации и увеличения тактов управления
от 10 до 100 с шагом 10. Эксперимент повторяется для разных показателей качества и параметров системы управления.
3.3.4. Группа вычислительных экспериментов № 4
Тема экспериментов: оценка качества управления алгоритмами,
синтезированными методами АКОР, и типовым ПИД-законом управления на различных показателях качества (2.10–2.28) для различных параметров системы управления и характеристик объекта.
Вопросы, подлежащие изучению:
Как влияют на качество управления задающие воздействия переменные в течение всего периода управления?
Как влияют на качество управления настроечные параметры при
переменных задающих воздействиях в течение всего периода управления, и в течение его части?
Как влияет наличие информационного запаздывания на качество
управления при переменных задающих воздействиях?
Как влияют на качество управления переменные возмущающие
воздействия в течение всего процесса управления?
Как влияют на качество управления настроечные параметры при
переменных возмущающих воздействиях в течение всего процесса?
Как влияет наличие информационного запаздывания на качество
управления при переменных возмущающих воздействиях?
Насколько большими по абсолютной величине получаются управляющие воздействия при отсутствии «штрафов» за их отклонение от номи91
нальных значений (в частности, в алгоритме АКОР, обеспечивающем возможность достичь заданных значений переменных состояния за один такт)?
Эксперимент 1: исследование качества воспроизведения переменного во времени задающего воздействия.
Варьируется по амплитуде и частоте переменное во времени (периодическое) задающее воздействие. Также изменяется величина информационного запаздывания. Эксперимент повторяется для разных показателей качества и параметров системы управления.
Эксперимент 2: исследование влияния настроечных параметров на
качество воспроизведения переменного во времени задающего воздействия.
Варьируются настроечные параметры регулятора при переменном во
времени (периодическом) задающем воздействии. Также изменяется величина информационного запаздывания. Эксперимент повторяется для
разных показателей качества и параметров системы управления.
Эксперимент 3: исследование качества управления при переменных во времени возмущающих воздействиях.
Варьируется по амплитуде и частоте переменное во времени (периодическое) возмущающее воздействие. Также изменяется величина информационного запаздывания. Эксперимент повторяется для разных показателей качества и параметров системы управления.
Эксперимент 4: исследование влияния настроечных параметров
на качество управления при переменных во времени возмущающих
воздействиях.
Варьируются настроечные параметры регулятора при переменном во
времени (периодическом) возмущающем воздействии. Также изменяется
величина информационного запаздывания. Эксперимент повторяется для
разных показателей качества и параметров системы управления.
Эксперимент 5: исследование процесса управления с алгоритмом
АКОР, обеспечивающим возможность достичь заданных значений
переменных состояния из заданных начальных условий за один такт.
Необходимо внести следующие изменения в параметры задачи по
сравнению со стартовым состоянием (см. п. 3.1.1):
1. Заменить размерность вектора управляющих воздействий с 2 на 4.
2. Заменить матрицу В на единичную размерности 4×4.
3. Заменить матрицу R размерности 4×2 на диагональную размерности 4×4 с нулевыми элементами.
4. Заменить матрицу UZ размерности 2×11 на матрицу размерности
4×11 с нулевыми элементами.
Приведем наиболее типичные результаты экспериментов групп №3 и № 4.
Проводилось исследование достижимого качества управления при наличии
информационного запаздывания. В систему, настроенную на достижение
наилучшего значения одного из показателей качества, вводилось информа92
ционное запаздывание. Обычно в настроенной системе управления показатели качества принадлежат области Парето, и улучшение значения одного
из них возможно только за счет ухудшения значения другого. Информационное запаздывание же не только изменяет показатели качества в худшую
сторону, но и действует в противовес компромиссу (ухудшает лучшие показатели качества и немного улучшает худшие). На рис. 30 показатели качества ухудшаются, но в то же время меняется тенденция поведения самих
показателей, хотя замены лучших показателей качества худшими не происходит, так как информационное запаздывание влияет на все показатели
качества сразу. Число тактов управления было увеличено до 100 по сравнению со стартовым значением.
8000
Значение СКО, %
7000
6000
5000
Наихудший показатель качества
4000
3000
Наилучший показатель качества
2000
1000
0
1
2
3
4
5
6
7
8
9
10
Число тактов запаздывания
Рис. 30. Влияние информационного запаздывания на «избранные» показатели (видно, что
наличие информационного запаздывания уменьшает «избранность» показателя качества и
немного улучшает другой показатель качества).
3.4. Выводы
1. Предложена методика проведения вычислительных экспериментов и определения области эффективного использования алгоритмов
управления, синтезированных с учетом информационного запаздывания, а также обоснования использования технических средств для реализации алгоритмов управления.
2. Описана структура разработанного программного комплекса и
предложены группы вычислительных экспериментов для испытания различных вариантов алгоритмического обеспечения управления динамическими объектами в цифровых системах управления.
3. Приведены основные результаты исследований различных цифровых систем управления с учетом ограниченности ресурсов технических
средств и информационным запаздыванием. В частности, подтверждены
теоретические предположения о свойствах САУ с ИЗ:
93
а) снижение своевременности реакции САУ на внешние факторы
(и, соответственно, возможное ухудшение показателей качества) по мере
усложнения описания объекта и/или алгоритмического обеспечения,
предпринимаемого для улучшения показателей качества;
б) наличие предела уточнения модели объекта, превышение которого может привести к потере преимуществ наукоемких, вычислительно
сложных оптимизационных алгоритмов перед простыми инженерными
алгоритмами;
в) наличие предела увеличения размерности пространства состояния для учета информационного запаздывания на этапе синтеза алгоритма, превышение которого приводит к потере преимуществ алгоритма,
синтезированного с учетом ИЗ, перед упрощенным оптимизационным алгоритмом, синтезированным без учета ИЗ.
4. Поскольку показатели качества, достижимые в САУ с ИЗ, зависят
не только от организации информационного и алгоритмического обеспечения, но и от конкретных параметров технических средств, только моделирование и вычислительные эксперименты являются надежным средством обоснования требований к САУ. В связи с этим разработанный программный комплекс может найти применение в организациях, осуществляющих разработку систем управления.
94
4. РАСПРЕДЕЛЕННЫЕ СТРУКТУРЫ АЛГОРИТМОВ,
УМЕНЬШАЮЩИЕ ИНФОРМАЦИОННОЕ ЗАПАЗДЫВАНИЕ
ЗА СЧЕТ ПАРАЛЛЕЛЬНЫХ ВЫЧИСЛЕНИЙ
В данной главе анализируются новые возможности повышения
быстродействия управляющей системы (и соответственно – снижения
ИЗ), предоставляемые методами распараллеливания алгоритмов обработки информации и управления между элементами вычислительной системы. Публикации по вопросам организации параллельных вычислений на
доступных, рядовых (не специализированных) ЭВМ с распространенными операционными системами появились в американской научной литературе лишь в последние 2−3 года безотносительно к вопросам создания
алгоритмического обеспечения САУ. Ниже в качестве одного из возможных применений распределенных вычислений для снижения ИЗ рассматривается задача увеличения быстродействия алгоритмов настройки параметров ПИД-регулятора в процессе управления.
4.1. Распределенная вычислительная система и ее характеристики:
основные понятия
Разделение ресурсов [72, 76, 89, 90] является главным мотивом конструирования распределенных систем, независимо от того, какой природы
является ресурс (вычислительный, память, сервис печати и т. п.). При этом
появляется возможность достичь производительности суперкомпьютеров с
меньшими финансовыми затратами, иметь огромные массивы памяти для
обработки данных, предоставлять дополнительные услуги. Более того, открывается целое направление задач автоматизации, которые ранее были
недоступными, например, организация мониторинга за экологическим состоянием местности, за состоянием здоровья людей в больнице, за состоянием объекта управления, управление бытовой техникой и т. п.
Возможность достичь высокой производительности вычислительной
системы является основной причиной рассмотрения распределенных систем в данной работе, поскольку это позволяет снизить влияние ограниченности ресурсов техники управления, тем самым уменьшить информационное запаздывание и за счет этого сделать доступной реализацию более совершенных алгоритмов управления, обеспечивающих лучшее качество управления в САУ.
Разделение ресурсов подразумевает использование всех ресурсов
системы данного типа по запросу одного или нескольких участников
системы. При этом используется термин «сервис» для части компьютерных систем, которые управляют набором родственных ресурсов и
представляют их функциональность пользователям, приложениям,
участникам системы, называемым «клиентами».
95
Под распределенной системой в данной работе понимается система, в которой компоненты, располагаемые на соединенных посредством
сети компьютерах, взаимодействуют и координируют свои действия
только с помощью механизма передачи сообщений. Такое определение
ведет к следующим характеристикам распределенной системы: параллельность работы компонентов, отсутствие единого времени и независимые отказы компонентов.
Важным моментом рассматриваемых распределенных систем является их гетерогенность – использование в качестве компонентов системы не только различных вычислительных устройств, но и различных видов технических средств, операционных и программных систем.
Кроме объявленных преимуществ, предоставляемых распределенными
системами, имеется целый ряд узких мест, которые необходимо разрешить
при создании распределенной системы. Кратко рассмотрим их особенности.
1. Гетерогенность. Хотя данное свойство является очень привлекательным (например, можно подключать любой вычислительный ресурс и
его использовать), оно порождает много проблем: типы данных могут
быть представлены различными способами на различных типах технического обеспечения; организация работы приложений отличается для разных операционных систем; языки программирования используют различные представления для символов и структур данных, и т. п. Все эти и
другие различия в представлении данных, организации работы должны
быть согласованы.
Для гетерогенных распределенных систем обычно используется решение в виде «промежуточного программного обеспечения» [76], которое предоставляет программную абстракцию и позволяет устранить
«несовместимости» путем необходимой трансляции одного типа данных
в другой, одной процедуры работы в другую и т. д.
Чаще всего промежуточное программное обеспечение реализуется
на базе протоколов сети Интернет (как наиболее распространенных), что
само по себе маскирует различия базовых сетей.
В дополнение к решению проблем гетерогенности промежуточное
программное обеспечение предоставляет унифицированную вычислительную модель, используемую разработчиками серверов и распределенных приложений. Таковыми являются: модель удаленного вызова процедур (Remote Procedure Calling – RPC), удаленного уведомления о событии, удаленный доступ к базам данных (Remote Database Connection –
RDBC) и распределенные транзакции.
Для создания промежуточного программного обеспечения могут использоваться различные программные технологии, например, технология
Common Object Request Broker Architecture (CORBA) [76, 90], которая
предоставляет модель удаленного вызова объектов, что позволяет объек96
там программы, выполняемой на одном компьютере, вызывать методы
объектов программы, выполняемой на другом компьютере. Или технология удаленного вызова процедур (Remote Method Invocation – RMI) [78,
90], реализованная на языке Java и предоставляющая практически такие
же средства, как и CORBA.
Также существенную роль в промежуточном программном обеспечении играет виртуальная машина – способ приведения кода, скомпилированного на одной платформе, к коду, выполнимому на другой. Это
возможно за счет того, что компилятор языка программирования генерирует код для виртуальной машины вместо кода для конкретного набора
аппаратных средств. Например, компилятор языка Java формирует код
для виртуальной машины Java (Java Virtual Machine), который исполним
на любой платформе.
2. Открытость системы определяет свойство, заключающееся в
том, что система может быть расширена и повторно реализована различными проектировщиками. Открытость распределенной системы
определяется, в основном, возможностями добавления новых разделяемых ресурсов, используемых клиентами.
Открытые распределенные системы могут быть, например, расширены на уровне аппаратного обеспечения – добавлением компьютеров в
систему или на уровне программного обеспечения – включением новых
сервисов и новых версий старых сервисов, позволяющих приложениям
разделять ресурсы. Проблемой разработчиков при этом является охватить
сложность распределенной системы, состоящей из различных компонентов, созданных различными людьми.
3. Безопасность. Большинство ресурсов, которые доступны в распределенной системе, имеют большое значение для своих клиентов, поэтому
их защита очень важна. Защита информационных ресурсов состоит из трех
компонентов: конфиденциальность (защита от несанкционированного доступа), целостность (защита от изменения или порчи), и работоспособность (защита от вмешательства с целью доступа к ресурсам).
В распределенной системе клиенты посылают запросы на доступ к
ресурсам, управляемым сервисами, что влечет за собой передачу сообщений по сети. При этом возникает две проблемы: посылка конфиденциальных данных в сообщении по сети и корректная идентификация клиента, от которого пришли эти данные. Обе проблемы могут быть решены с
помощью специальных техник кодирования. Для задач построения алгоритмов автоматического управления данная проблема существенна лишь
в случаях, когда необходима защита САУ от преднамеренной порчи.
4. Расширяемость. Система считается расширяемой, если она остается работоспособной при значительном увеличении количества ресурсов
и клиентов. Разработка расширяемых распределенных систем порождает
97
следующие проблемы:
контроль проигрыша производительности – если имеются i одинаковых компьютеров, которые соединены в сеть, то теоретическое
предположение об увеличении вычислительного ресурса в i раз по сравнению с одним компьютером на практике почти никогда не соблюдается,
т. к. необходима координация действий между компьютерами, занимающая некоторую часть вычислительного ресурса;
избежание дефицита ресурсов – при частом использовании какого-то ресурса (или его части) клиентами сети может возникнуть ситуация
отказа его предоставления.
В идеальном случае распределенная система не должна изменять
своего поведения при расширении за счет увеличения числа клиентов
или ресурсов, но это труднодостижимо. Проблема расширяемости является доминирующей при разработке распределенных систем.
5. Обработка отказов. Отказы в распределенных системах являются
частичными, что означает, что некоторые компоненты могут не функционировать в то время, пока остальные работают в нормальном режиме, что является привлекательной чертой использования распределенных систем. Но по
этой же причине обработка отказов в таких системах очень сложна. Выделим основные процедуры, составляющие процесс обработки отказов в распределенных системах: обнаружение ошибок, маскировка отказов, терпимость к отказам, восстановление после отказов, избыточность.
6. Параллелизм. Как сервисы, так и приложения предоставляют ресурсы, которые могут быть совместно использованы клиентами в распределенной системе. Поэтому существуют ситуации, при которых несколько клиентов будут пытаться обратиться к разделяемому ресурсу в один и тот же момент времени, вследствие чего сервис, который представляет разделяемый
ресурс в распределенной системе, должен быть ответственным за корректное
выполнение процедур изменения данных, протекающих параллельно.
7. Прозрачность. Прозрачность определяется как сокрытие от
пользователя и разработчиков приложений свойства сепаратности компонентов распределенной системы так, чтобы эта система воспринималась как нечто целостное, а не как набор отдельных компонентов. Реализация свойства прозрачности системы является значительным фактором,
влияющим на разработку системного программного обеспечения.
Согласно «Руководству по усовершенствованной архитектуре сетевых
систем» (The Advanced Network Systems Architecture Reference Manual) и
справочно-информационной модели международной организации по стандартизации для открытых систем распределенной обработки информации
(International Standards Organization Reference Model for Open Distributed
Processing – ISO RM-ODP) выделяется восемь форм прозрачности [71]:
98
1) прозрачность доступа – доступ к локальным и удаленным ресурсам осуществляется с помощью идентичных операций;
2) прозрачность физического местоположения – доступ к ресурсам
осуществляется без знаний об их физическом расположении;
3) прозрачность копий – возможно использование множественных
копий ресурсов, создаваемых для повышения работоспособности, без
уведомления пользователя или приложения об их существовании;
4) прозрачность параллелизма – распределенная система и ее компоненты должны быть организованы так, чтобы процессы, использующие
ее ресурсы, могли выполняться параллельно, не препятствуя при этом
друг другу.
5) прозрачность отказов – система должна предоставлять способы
сокрытия отказов программного и аппаратного обеспечения, представляющего собой ресурсы системы, от пользователей и способствовать
корректному завершению задач клиентов на фоне этих отказов;
6) прозрачность перемещения – перемещение ресурсов и клиентов
внутри системы никак не должно влиять на их работу;
7) прозрачность исполнения – система должна разрабатываться с
возможностью изменения ее конфигурации для усовершенствования
производительности при изменяющихся в качественном и количественном планах подгружаемых ресурсах;
8) прозрачность расширяемости – система и приложения, выполняемые внутри нее, могут расширяться в масштабах без изменения структуры системы в целом или алгоритмов работы приложений.
Два наиболее важных свойства – это прозрачность доступа и прозрачность физического местоположения; их наличие или отсутствие
сильно сказывается на использовании распределенных ресурсов.
4.2. Постановка задачи исследования распределенных алгоритмов
настройки коэффициентов ПИД-регулятора в процессе управления
Сформулируем общую постановку задачи исследования распределенных алгоритмов настройки параметров регулятора с учетом ограниченности ресурсов технических средств при условии выполнения всех
требований и ограничений, описанных в п. 4.1.
Требуется:
1. Разработать архитектуру системы распределенных вычислений на базе гетерогенной вычислительной сети с предоставлением вычислительного
сервиса и сервиса распределенной совместно используемой памяти.
2. Определить информационные потоки и организацию взаимодействия
между компонентами распределенной гетерогенной вычислительной сети.
3. Построить систему распределенных вычислений для алгоритмауправления линейным динамическим объектом на базе ПИД-закона с
99
настройкой данной системы на наилучшие значения показателей качества алгоритмом адаптивного прямого поиска Хука-Дживса и генетическим алгоритмом.
4. Провести исследование и анализ вычислительных характеристик
построенной системы управления, определить эффективность применения распределенных гетерогенных вычислительных сетей.
4.3. Общая структура распределенной вычислительной системы.
Выбор средств реализации
Наиболее важной задачей при построении распределенной системы
(из числа перечисленных выше в п. 4.1) является задача создания архитектуры системы. Существует два подхода к решению данной задачи [76,
90] – это создание параллельной вычислительной архитектуры и распараллеливание вычислений между различными вычислительными процессами. В данной работе исследуется второй подход, поскольку распределенная система является гетерогенной, а при использовании первого
подхода это свойство сильно усложняет создание системы. Кроме того,
первый подход подразумевает создание специальных технических
средств, а второй – возможность использования существующих, путем
разработки специального программного обеспечения.
Предлагается следующая архитектура распределенной вычислительной системы для гетерогенной сети (рис. 31), не требующая априорных
знаний каждого участника вычислений о количестве участников, не
предполагающая одновременной активности участников и знания способов взаимодействия с другими участниками.
Согласно рис. 31, распределенная вычислительная система состоит
из пяти компонентов: (1) распределенной совместно используемой памяти, (2) клиентской программы, (3) вычислительного сервиса, (4) решающего сервиса, (5) коммуникационного сервиса, причем число компонентов в конкретной системе и их физическое расположение в гетерогенной
сети может быть различным. Например, клиент может находиться в какой-то локальной сети или в глобальной сети Интернет (на рис. 31 клиенты и сервисы, находящиеся вне локальных или Jini сетей [78, 90]).
Компьютеры (или вычислительные устройства), на которых находятся
компоненты, могут иметь различную конфигурацию технического и
программного обеспечения, а также различные типы соединений с удаленными ресурсами.
100
Локальная сеть
ВС
РС
РС
Клиент
Клиент
Распределенная совместно
используемая память
РС
РС
ВС
Локальная сеть
Jini сервис
ВС
Jini сервис
Jini сеть
ВС
– вычислительный сервис
– прямая связь
РС
– решающий сервис
– коммуникационный протокол
Клиент
– клиентская программа
Рис. 31. Структурная схема гетерогенной распределенной вычислительной системы.
На рис. 31 показано, что распределенная вычислительная система
может включать Jini сеть. Данная сеть основана на технологии Jini, разработанной компанией Sun Microsystems [78], которая заключается в объединении групп клиентов и интересующих их ресурсов. Ресурсы могут
представлять собой как устройства, так и прикладные программы, сопровождаемые аппаратным обеспечением, что отличает Jini сеть от обычной
локальной сети. Например, в Jini сеть может входить сотовый телефон, и
благодаря специальному аппаратно-программному обеспечению его
можно подключать к обычной вычислительной системе для использования его памяти.
Технология Jini состоит из двух основных частей:
набор компонентов, которые составляют инфраструктуру объединенных сервисов в распределенной системе;
модель программирования, которая поддерживает и способствует
производству распределенных сервисов.
Благодаря разработанным спецификациям и стандартам, технология
Jini является очень мощным средством для реализации распределенной
вычислительной системы. Так, архитектура технологии Jini разработана
таким образом, что можно использовать динамическое изменение всех
101
компонентов в распределенной системе, сама инфраструктура технологии
Jini обеспечивает механизмы присоединения и отключения от сети
устройств, сервисов и клиентов. Присоединение и выход из сети Jini являются простыми и естественными, часто автоматическими, событиями.
Описанные преимущества технологии Jini, программная модель которой реализована на языке Java, а также множество имеющихся дополнительных технологий программирования, облегчающие создание распределенных систем на языке Java, который является платформонезависимым языком, определили выбор языка программирования разработанной распределенной вычислительной системы.
В качестве дополнительных технологий программирования были
выбраны: технология удаленного вызова процедур (RMI) и технология
организации распределенной совместно используемой памяти (JavaSpaces) [79, 90].
Приведем краткое описание каждого компонента распределенной
вычислительной системы для гетерогенной сети:
1. Распределенная совместно используемая память (РСИП) – это
сервис, реализованный согласно спецификации технологий Jini [78, 90] и
JavaSpaces [79, 90]. Основными функциями сервиса являются: принимать
запросы, поступающие от вычислительных сервисов, обрабатывать их и
возвращать результат.
2. Клиентская программа представляет собой Java-приложение,
основной функцией которого является предоставление пользовательского
интерфейса для задания настроечных параметров прикладной задачи. Это
приложение принимает значения параметров, проверяет их на допустимость, после чего формирует компонент данных, описывающих задачу.
Далее, клиентская программа передает этот компонент данных в РСИП через коммуникационный сервис, согласно спецификации семантики записи
компонента. Дальнейшая функция клиентской программы сводится к ожиданию появления результата выполнения задачи в РСИП. После его извлечения клиентская программа отображает этот результат на экране – задача
считается решенной.
3. Решающий сервис – это Java-приложение, которое посылает запрос системе РСИП на поиск компонента данных, описывающего задачу.
В случае нахождения компонента система РСИП передает его решающему
сервису. Задача этого сервиса – сформировать задания, являющиеся блоками, которые возможно распараллелить, и которые содержат данные,
подлежащие обработке, и/или код, выполняющий обработку этих данных.
Сформированные задания помещаются в РСИП. После этого решающий
сервис собирает результаты решения сгенерированных им заданий, формирует общий результат решения задачи и помещает его в РСИП.
102
4. Вычислительный сервис – это Java-приложение, функцией которого является вычисление задачи (или выполнение кода), сформированной решающим сервисом в течение транзакции. Он ждет появления задания в РСИП, извлекает его, производит необходимые вычисления и помещает результат вычислений обратно в РСИП.
КЛИЕНТСКАЯ ПРОГРАММА
РЕШАЮЩИЙ СЕРВИС
1. Получение настроечных
параметров задачи
1. Ожидание появления компонента данных в РСИП
2. Формирование компонента
данных, описывающего задачу
2. Получение компонента
данных
3. Помещение компонента
данных в РСИП
3. Формирование заданий,
содержащих данные и код
4. Помещение заданий в
РСИП
4. Ожидание результата
вычисления задачи
5. Ожидание результата
вычисления заданий
5. Получение результата вычисления задачи и отображение егона экране
6. Формирование результата
выполнения задачи и
помещение его в РСИП
РАСПРЕДЕЛЕННАЯ СОВМЕСТНО
ИСПОЛЬЗУЕМАЯ ПАМЯТЬ
1. Ожидание появления
задания в РСИП
2. Получение задания
3. Вычисление задания и
помещение его результата
в РСИП
ВЫЧИСЛИТЕЛЬНЫЙ СЕРВИС
Рис. 32. Схема работы основных компонентов распределенного приложения.
5. Коммуникационный сервис – совокупность программных
средств, предназначенных для соединения компонентов системы с РСИП,
необходимость которого регламентируется неоднородностью архитектуры подсетей. Последовательность работы основных компонент распределенного приложения показана на рис. 32.
103
Перечислим основные требования к решающему сервису:
1) должен отслеживать появление задач в системе только того типа,
который он может решать;
2) в случае, если решающий сервис принял задачу, он должен уведомить остальные сервисы о том, что данная задача уже решается;
3) должен предотвращать потерю задачи в случае своего отказа;
4) должен разбить задачу на подзадачи и предоставить эти подзадачи
вычислительным сервисам через РСИП;
5) должен собирать результаты решения подзадач в РСИП, контролируя наличие необходимого числа результатов;
6) в случае потери результатов подзадач должен инициировать повторную раздачу подзадач, результаты которых были потеряны из-за сбоя;
7) после завершения расчета задачи должен предоставить результат
решения.
Перечислим основные требования к вычислительному сервису:
1) должен отслеживать появление подзадачи в системе только того
типа, который он может решить;
2) должен предотвращать повторное решение уже решенной им задачи другими сервисами;
3) должен предотвращать потери подзадач в случае своего отказа.
К распределенной совместно используемой памяти в разрабатываемой системе выдвигается только одно требование – организация синхронизации доступа к данному сервису. Проблема обеспечения устойчивости памяти [74, 76, 87, 90] является очень сложной и в данной работе не
рассматривается, однако следует отметить, что технология JavaSpaces
[79] содержит ряд мер для решения данной проблемы: неизменяемые
данные (допустимы только операции чтения, добавления и удаления данных), отсутствие локальных копий памяти. Решение же проблемы синхронизации происходит с помощью блокировки и семафоров на основе
репозитория (хранилища данных) функционирования.
С учетом разработанной архитектуры, описанных требований и организации взаимодействия компонентов была создана экспериментальная
распределенная вычислительная система.
На разработанной системе были реализованы генетический алгоритм
и алгоритм адаптивного прямого поиска Хука-Дживса для настройки коэффициентов ПИД-регулятора.
Генетический алгоритм в распределенной вычислительной системе
не имеет ограничений в распараллеливании. Операции применения генетических операторов разбиваются на подзадачи (нахождение новых значений параметров регулятора из множества значений на предыдущей
итерации), которые возможно распараллелить произвольно, так как подза
104
дачи не зависят друг от друга в области начальных данных.
Алгоритм Хука-Дживса в классической постановке [39, 61, 65] распараллелить невозможно, поскольку после каждого нахождения удачного
направления производится движение к экстремуму. Однако, можно несколько модифицировать алгоритм – искать улучшающее направление
для целевой функции по всем независимым переменным на одной итерации, а затем делать шаг в этом направлении, при этом можно распараллелить только одну итерацию и перейти на другую итерацию можно лишь
после полного завершения текущей.
4.4. Исследование распределенных алгоритмов адаптации
ПИД-регулятора на базе гетерогенной вычислительной сети
Общая цель исследований: изучение преимуществ, предоставляемых распараллеливанием алгоритмов обработки информации и управления, в частности, алгоритмов настройки коэффициентов ПИД-регулятора
в процессе управления.
Для достижения цели проводились две группы вычислительных экспериментов:
определение предельных вычислительных характеристик распределенной системы на специально разработанной абстрактной (тестовой) задаче;
оценка эффективности реализации настройки параметров ПИДрегулятора в процессе управления на базе распределенных алгоритмов.
Особенностями абстрактной задачи являются:
1) задача представляет собой цикл однотипных вычислений, не зависящих друг от друга (т. е. имеется возможность распараллелить вычисления);
2) параллельные блоки представляют собой процессы, моделирующие вычисления с помощью системной задержки времени;
3) входным параметром для процессов, осуществляющих расчет параллельных блоков задачи, является значение системной задержки времени;
4) результатом расчета параллельных блоков является пустой массив,
размер которого – величина изменяющаяся.
Вычислительные эксперименты проводились в локальной сети, объединяющей от двух до восьми персональных компьютеров, как в однородной среде, так и в гетерогенной. Однородная система состояла из персональных компьютеров, обладающих следующими техническими параметрами: оперативная память – 128 Мбайт, центральный процессор Intel
Celeron с тактовой частотой 566 МГц, жесткий диск общим объемом
10 Гбайт, сетевая карта со скоростью передачи данных до 10 Мбит/с, сетевой кабель – витая пара. На всех компьютерах была установлена операционная система Windows 2000 с одинаковыми настройками.
В гетерогенной системе технические параметры компьютеров сети
105
были следующими: оперативная память от 64 Мбайт до 512 Мбайт, центральный процессор от Intel Pentium II с тактовой частотой 266 МГц до
Intel Pentium 4 с тактовой частотой 1.7 ГГц, жесткий диск объемом от
10 Гбайт до 60 Гбайт, сетевые карты со скоростью передачи данных до
10 Мбит/с и до 100 Мбит/с. Сетевой кабель всегда был витой парой. На
компьютерах были установлены операционные системы Windows 98,
Windows NT, Windows 2000, RedHat Linux 5.0 с разными настройками.
Номинальная загрузка трафика сети во время экспериментов не превышала 8 %.
Стартовыми параметрами для экспериментов являются: количество сервисов распределенной совместно используемой памяти – 1, количество решающих сервисов – 1, количество вычислительных сервисов –
по одному на каждый компьютер, количество коммуникационных сервисов – по одному на каждый вычислительный сервис.
4.4.1. Группа вычислительных экспериментов № 1
Тема экспериментов: определение предельных вычислительных характеристик распределенной системы на абстрактной задаче.
Вопросы, подлежащие изучению:
Как сказывается количество распараллеливаемых подзадач на скорость вычислений в распределенной системе?
Как сказывается количество решающих и вычислительных сервисов на скорость вычислений в распределенной системе?
Как сказывается рост объемов передаваемых данных на скорость
вычислений в распределенной системе?
Как сказывается длительность решения подзадачи на скорость вычислений в распределенной системе?
Эксперимент 1: изучение влияния количества распараллеливаемых подзадач на скорость вычислений.
Осуществлялся запуск абстрактной тестовой задачи с решающим
сервисом, который формирует подзадачи длительностью 5 секунд. Количество подзадач варьировалось от одной до трехкратного превышения
числа вычислительных сервисов. Эксперимент был повторен для разного
количества компьютеров и вычислительных сервисов, а также длительности решения подзадачи.
Эксперимент 2: изучение влияния количества сервисов на скорость вычислений.
Данный эксперимент проводился аналогично эксперименту № 1, варьировалось количество вычислительных и, затем, решающих сервисов
от одного до трехкратного превышения числа компьютеров в сети. Экс106
перимент был повторен для разного количества компьютеров и длительности решения подзадачи.
Эксперимент 3: изучение влияния роста объема передаваемых
данных на скорость вычислений.
Данный эксперимент проводился аналогично эксперименту № 1, при
этом варьировался объем передаваемых данных от 1 байта до 100 Кбайт.
Эксперимент был повторен для разного количества вычислительных, решающих сервисов, числа компьютеров и длительности решения подзадачи.
4.4.2. Группа вычислительных экспериментов № 2
Тема экспериментов: определение эффективности распараллеливания алгоритмов настройки ПИД-регулятора в процессе управления.
Вопросы, подлежащие изучению:
Как сказывается количество подзадач на скорость работы алгоритмов настройки в распределенной системе?
Как сказывается количество решающих и вычислительных сервисов на скорость работы алгоритмов настройки в распределенной системе?
Как сказывается рост объемов передаваемых данных на скорость
работы алгоритмов настройки в распределенной системе?
Как сказывается длительность решения подзадачи на скорость работы алгоритмов настройки в распределенной системе?
Какой алгоритм настройки параметров регулятора вносит меньшее
информационное запаздывание в систему управления – Хука-Дживса или
генетический алгоритм?
Во всех проводимых экспериментах показателем скорости является
время решения задачи, которое определялось как среднее значение из 7–10
повторений эксперимента с вычислением относительной ошибки измерения.
Эксперимент 1: изучение влияния количества распараллеливаемых подзадач на скорость вычислений.
Решающий сервис настраивается таким образом, чтобы он формировал подзадачи общим количеством от одной до 2m, где m – число настраиваемых параметров. Для модифицированного алгоритма Хука-Дживса
это означает, что число подзадач будет варьироваться в пределах от одной подзадачи, находящей улучшающее направление по всем независимым переменным, до 2m подзадач, каждая из которых находит приращение независимой переменной в одном направлении и значение целевой
функции для этого направления. Для генетического алгоритма максимальное число подзадач следует брать 3k, где k – количество пар значений параметров (коэффициент 3 определяется из количества применяемых генетических операторов). Эксперимент был повторен для разного
количества компьютеров и вычислительных сервисов. Необходимо заме107
тить, что варьирование количества решаемых подзадач в данном эксперименте связано со временем решения одной подзадачи и объемом передаваемых данных.
Эксперимент 2: изучение влияния количества сервисов на скорость вычислений.
Данный эксперимент проводился аналогично эксперименту № 1, варьируют количество вычислительных и, затем, решающих сервисов от одного до трехкратного превышения числа компьютеров в сети. Эксперимент
был повторен для разного количества компьютеров и подзадач. Необходимо также заметить, что варьирование количества решаемых подзадач в
данном эксперименте связано со временем решения одной подзадачи и
объемом передаваемых данных.
Эксперимент 3: изучение влияния роста объема передаваемых
данных на скорость вычислений.
Данный эксперимент проводился аналогично эксперименту № 1, при
этом варьировался объем передаваемых данных одной подзадачи, который связан с длительностью решения подзадачи и их общим количеством. Эксперимент был повторен для разного количества вычислительных, решающих сервисов и числа компьютеров.
Эксперимент 4: анализ и сравнение алгоритма настройки параметров регулятора Хука-Дживса и генетического алгоритма.
Данный эксперимент проводился аналогично эксперименту № 1, при
этом анализировалась вычислительная сложность каждого алгоритма с
учетом распараллеливания, а также проводилось сравнение значений показателей качества, достижимых в процессе управления при использовании каждого метода. Варьировалось количество подзадач, которое связано с объемом передаваемых данных одной подзадачи и с длительностью
ее решения. Эксперимент был повторен для разного количества вычислительных, решающих сервисов и числа компьютеров.
4.4.3. Основные результаты вычислительных экспериментов
Проводился эксперимент по выявлению тенденции в изменении
производительности решения задачи настройки системы управления генетическим алгоритмом за счет распределения его на несколько вычислительных ресурсов в зависимости от количества компьютеров.
Отличия от стартовых настроек: на компьютере, где находился сервис РСИП, отсутствовали другие сервисы, и выполнялась клиентская
программа, на компьютере, где находился решающий сервис, выполнялся
и вычислительный сервис. Сеть, в которой проводился эксперимент, была однородная.
Неизменяемые параметры задачи: параметры системы управления,
108
количество итераций – поколений (параллельных блоков задачи) равно
10000. Варьируемые параметры задачи – количество вычислительных
сервисов (каждый сервис выполнялся на отдельном компьютере).
В ходе выполнения эксперимента было выявлено (рис. 33): увеличение производительности вычислений при добавлении новых вычислительных сервисов (компьютеров) происходит не линейно, а по кривой с
насыщением. Этот эффект объясняется тем, что необходимы затраты на
передачу данных, на координацию вычислительных сервисов и организацию распределенной системы. Возможна ситуация, в которой решающий
сервис не будет успевать собирать данные о решении подзадач и координировать раздачу новых подзадач
Время вычислений, мс
35000
30000
Решающих сервисов – 2
25000
20000
Решающих сервисов – 1
15000
10000
5000
0
1
2
3
4
5
6
7
Число вычислительных сервисов
Рис. 33. Зависимость времени решения задачи от количества вычислительных сервисов
(для сравнения, вычисление задачи на одном компьютере без распределенной системы составляет 22054 мс).
Примечание. На рис. 33 время вычислений является средним значением для
десяти опытов, относительная погрешность эксперимента не превышает 5 %.
Для приведенного примера (рис. 33) оптимальное количество вычислительных сервисов равно трем для одного решающего сервиса и четырем для двух решающих сервисов, дальнейшее увеличение вычислительных сервисов не приводит к заметному ускорению вычислений.
Необходимо увеличивать либо количество решающих сервисов, либо менять объем передаваемых данных, либо менять объем вычислений одного
вычислительного сервиса. Для каждой задачи эти параметры устанавливаются экспериментально.
Если же попытаться далее увеличивать количество решающих сервисов по отношению к количеству вычислительных сервисов, то можно
обнаружить, что система будет наращивать производительность также не
пропорционально – сервис РСИП будет не успевать за количеством дан109
ных, передаваемых другими сервисами. Таким образом, приходится
находить баланс между количеством всех сервисов.
Исследуемое количество итераций генетического алгоритма – 10000
позволяет получить результаты задачи настройки, очень близкие к результатам алгоритма Хука-Дживса (расхождение в оценке точки экстремума не более 7 %). В большинстве задач бывает достаточно 100 итераций для получения приемлемых значений настроечных параметров регулятора, а поскольку количество вычислений в генетическом алгоритме пропорционально зависит от числа итераций, то можно утверждать,
что минимально необходимое время для настройки составляет 0.05 с в
исследуемой распределенной вычислительной системе.
В ходе проведения экспериментов на абстрактной задаче было
установлено:
процедуры внесения и изъятия данных из РСИП должны выполняться гораздо быстрее времени ожидания появления следующих результатов. Зависимость максимального времени появления новых результатов, установленная экспериментальным путем, составляет не менее 2t,
где t – время внесения и изъятия данных. Это означает, что вычислительный процесс должен длиться не менее двойного интервала времени передачи данных. Данное ограничение особенно важно, если в задаче имеется
связь различных этапов (т. е. если определенный этап не может начаться
без завершения предыдущего). Если же такой зависимости нет, то данные
просто можно записывать в память, а потом целиком забрать.
при некотором объеме данных, передаваемых от вычислительных
сервисов к решающему сервису, последний может «не успевать» за вычислительными сервисами (рис. 34). И если количество вычислительных
сервисов фиксировано (для рис. 34 равно 4), то увеличение объема данных ведет к увеличению времени выполнения задачи. При таких условиях дальнейшее увеличение количества вычислительных сервисов не приведет к убыстрению процесса, единственным способом ускорения расчета всей задачи в целом может быть только увеличение производительности компьютера, на котором выполняется сервис РСИП.
110
Время вычислений, мс
70000
60000
50000
40000
30000
20000
10000
0
4
8
16
32
64
128
Объем передаваемых данных, Кбайт
Рис. 34. Зависимость времени решения задачи от объема передаваемых данных (число подзадач – 100, время решения подзадачи – 0.5 с).
Примечание. На рис. 34 время вычислений является средним значением для десяти опытов, относительная погрешность эксперимента не
превышает 5 %.
В ходе проведения экспериментов по сопоставлению алгоритма Хука-Дживса и генетического алгоритма, с позиции вносимого ими информационного запаздывания и достижимого качества управления, получены
следующие результаты:
алгоритм адаптивного прямого поиска Хука-Дживса вносит большее
информационное запаздывание в систему с разработанной распределенной архитектурой, чем генетический алгоритм, поскольку он имеет ограничения при распараллеливании (см. приведенные ниже результаты анализа вычислительной сложности);
алгоритм Хука-Дживса доставляет лучшие значения показателям качества управления, чем генетический алгоритм.
Вычислительную сложность обоих алгоритмов можно представить
следующей зависимостью от числа тактов управления (в формуле имеется множитель N 2 N / 2 , поскольку в контуре адаптации необходимо на
каждом такте рассчитывать коэффициенты от текущего такта до последнего, т. е. на первом такте N, на втором N – 1 и т. д.):
N2 N
(4.1)
N r W p Wa Wc ,
2
где N – число тактов управления; r – количество управляющих воздействий; Wp – вычислительная сложность алгоритма, реализуемого в регуляторе; Wa – вычислительная сложность алгоритма адаптации; Wс – вычислительная сложность настраиваемого критерия.
W
111
Множитель Wp в (4.1) зависит от количества настраиваемых коэффициентов и сложности расчетов управляющих воздействий.
Зависимость количества элементарных операций от роста числа
тактов управления по формуле (4.1) для алгоритма с ПИД -законом
управления приведена в табл. 13. Видно, что вычислительная сло жность, а, следовательно, и информационное запаздывание сопост авимы с вычислительной сложностью оптимальных алгоритмов, си нтезированных методами АКОР (см. п. 2.3.5, стр. 63−72).
Таблица 13
Зависимость количества элементарных операций
от числа тактов управления
Число тактов управления
n = 10
n = 20
n = 30
n = 40
n = 50
n = 60
n = 70
n = 80
n = 90
n = 100
Сложений
3300
25200
83700
196800
382500
658800
1043700
1555200
2211300
3030000
Умножений
1650
12600
41850
98400
191250
329400
521850
777600
1105650
1515000
Перемещений
550
4200
13950
32800
63750
109800
173950
259200
368550
505000
Примечание. Число управляющих воздействий – 1, количество приведенных операций необходимо умножить на вычислительную сложность настраиваемого критерия Wc и на вычислительную сложность алгоритма адаптации Wa.
Вычислительная сложность WaХД алгоритма Хука-Дживса равна 6
операциям типа «сложение» и «сравнение», а также либо одной операции
типа «деление», либо одной операции типа «умножение» на одном шаге
алгоритма для системы управления с ПИД-регулятором. Именно выполнение этих операций можно распараллелить в разработанной распределенной вычислительной системе.
Вычислительная сложность WaГА генетического алгоритма равна 4
операциям типа «сложение», трем операциям типа «перемещение», а
также 6 операциям типа «сравнение» (данное количество зависит от
настроек алгоритма) на одном шаге алгоритма для системы управления с
ПИД-регулятором. В отличие от алгоритма Хука-Дживса, в данном алгоритме можно распараллелить как операции текущего шага, так и вычисление любого другого (в алгоритме нет зависимости какой-либо итерации
от результата другой итерации).
112
Замечания.
1. Количество операций типа «сложение» в генетическом алгоритме
является верхней оценкой, т. к. в алгоритме используются битовые операции (сдвиг, битовое сложение, битовое умножение), которые выполняются гораздо быстрее операций типа «сложение».
2. Количество операций типа «сравнение» является верхней оценкой
для типовой реализации генетического алгоритма (зависит от количества
порождаемых потомков и числа применяемых операторов). Одним из
важных моментов является то, что в отличие от алгоритма Хука-Дживса,
где только половина сравнений (в случае удачного шага) являются результативными, в генетическом алгоритме каждое сравнение является результативным.
3. Генетический алгоритм может не находить наилучшие значения
параметров при плохих начальных данных (требуется процедура генерации стартовых значений).
Если принять быстродействие используемого вычислительного
устройства равным 6000 операциям типа «сложение», «умножение» и 100
операциям типа «деление», «сравнение» и 10000 операциям типа «перемещение» за один такт управления (как в главе 3), то из табл. 13 видно,
что на одном устройстве возможна реализация генетического алгоритма
адаптации только при 10 тактах управления. Для 20 тактов управления
алгоритм будет вносить 5 тактов информационного запаздывания в систему управления. Однако если использовать гетерогенную распределенную вычислительную систему, то при четырех вычислительных сервисах
(т. е. четырех вычислительных устройствах) и одном решающем сервисе,
алгоритм не будет вносить запаздывания в систему.
Алгоритм Хука-Дживса, который является более медленным и менее
эффективно распараллеливаемым (из-за взаимозависимости итераций
расчетов), с помощью реализации в распределенной вычислительной системе с четырьмя вычислительными устройствами, позволяет увеличить
число тактов управления до 14, при 20 тактах управления алгоритм будет
вносить 3 такта информационного запаздывания.
Результаты проведенных экспериментов позволяют сделать следующие общие выводы об использовании распределенной вычислительной
системы для настройки параметров цифрового ПИД-регулятора. Выбор
распределенного алгоритма настройки параметров определяется следующими параметрами и характеристиками:
интервалом дискретизации, принятым в цифровой системе управления;
параметрами технических средств реализации распределенной системы;
113
количеством вычислительных, решающих и РСИП сервисов;
количеством подзадач и объемом передаваемых данных;
достижимым улучшением показателей качества в результате
настройки системы управления и стоимостью разработки и внедрения
распределенной системы.
Проведенные эксперименты показывают, что применение распределенной вычислительной системы достаточно эффективно для задач
настройки параметров ПИД-регулятора, если используются свободные
вычислительные ресурсы уже существующей вычислительной сети для
систем управления с достаточно большим интервалом дискретизации,
измеряемым минутами или часами. В этом случае, настройка помогает
улучшить значения показателей качества на 5−10 %, особенно при сменах режима управления (задающего воздействия).
4.5. Оптимизация загрузки гетерогенной вычислительной сети
При адаптации параметров ПИД-регулятора в реальном времени были выявлены две проблемы [18, 51-53], которые должны решаться совместно: оптимальное использование ресурсов распределенной вычислительной системы с точки зрения загрузки ее ресурсов и получение какого-либо приемлемого результата (поскольку система функционирует в
реальном времени). Вторая проблема обусловлена тем, что иногда в
наихудшие периоды работы, при большой загрузке вычислительной сети
распределенные алгоритмы не давали результата в отведенное время.
Для решения этих проблем предлагается, чтобы решающий сервис
собирал информацию о вычислительных сервисах (количество решенных
подзадач, общее время работы, число отказов, длительность решенных
подзадач) на основе которой, после небольшого статистического анализа,
он устанавливал бы уровень подзадачи.
Однако, на ряде экспериментов выявилось [18, 51−53], что адаптация
ПИД-регулятора становилась хуже, причем до такой степени, что показатели качества приближались к системе управления с регулятором у которого коэффициенты настройки постоянные, т. е. эффект адаптации терялся. Причиной такого эффекта были большие временные задержки при
расчетах новых параметров из-за отказов в распределенной вычислительной системе. Кроме того, ряд вычислительных сервисов простаивал
некоторое время, т. к. их характеристики не позволяли взять подзадачу
высокого уровня.
Для устранения обнаруженного эффекта в работе было предложено
формировать два типа подзадач. Первый тип подзадач T1 таков, что данные подзадачи должны быть решены обязательно (в задаче настройки коэффициентов точность нахождения новых параметров уменьшалась на
114
несколько порядков) в заданное время, т. е. ошибки решения данных подзадач не суммируются во времени. Второй тип подзадач T2 таков, что
данные подзадачи могут остаться и нерешенными, т. е. ошибки решения
суммируются во времени. Благодаря такому подходу можно обеспечить
некоторую гарантированную адаптацию параметров регулятора в системе управления.
Таким образом, алгоритм решающего сервиса должен сформировать
две стратегии – одну для назначения обязательных подзадач типа T1 и
вторую для необязательных подзадач типа T2.
Стратегия назначения необязательных подзадач T2 осталась прежней, т.е. на основе статистических данных о работе вычислительных сервисов решающий сервис назначал данную подзадачу одному из них.
Данная стратегия включалась лишь после решения всех обязательных
подзадач T2.
Для формирования стратегии решения обязательных подзадач в системе вводится функция ошибок [75]:
k
Ek ε(a j , j ),
j 1
где k – количество подзадач, ε k (ak , j ) – функция вероятности появления
ошибки при решении j-й подзадачи, длительностью aj.
Решающий сервис при назначении подзадач стремится минимизировать данную функцию и использует следующую информацию: время
начала, время решения и время окончания подзадачи. Минимизация производится путем назначения подзадач вычислительным сервисам с
наименьшей загрузкой, причем наиболее длительные подзадачи назначаются наиболее стабильно работающим (с меньшим количеством ошибок) вычислительным сервисам. Данный алгоритм был назван адаптивным, поскольку он подстраивается под особенности вычислительной системы в процессе работы.
Разработанный алгоритм был исследован на модели системы управления динамическими объектами различных порядков, с различными задающими воздействиями, дрейфом параметров объекта и помехами в каналах измерения выхода объекта и выдачи управляющих воздействий.
Тема экспериментов: определение наиболее эффективного способа
повышения загрузки распределенной вычислительной сети.
Вопрос, подлежащий изучению:
Какой алгоритм назначения подзадач решающими сервисами является
наиболее приспособленным к отказам в системе?
Эксперимент: изучение различных алгоритмов названия подзадач
и их влияния на скорость вычислений.
115
Осуществлялся запуск алгоритмов адаптации параметров регулятора
генетическими алгоритмами. Варьировалось число сбоев в распределенной вычислительной системе. Эксперимент был повторен для разного
количества компьютеров и вычислительных сервисов.
Сравнение разработанного адаптивного алгоритма, алгоритма распределения подзадач только на основе статистических данных и самоорганизующихся сервисов (вычислительные сервисы берут подзадачи «по
своему усмотрению», как было описано выше в п 4.3) по зависимости
времени вычисления от количества вычислительных сервисов представлено на рис. 35 (для сравнения, вычисление задачи на одном компьютере
без распределенной системы составляет 22054 мс).
Время вычислений, мс
35000
30000
Самоорганизующийся алгоритм
25000
Статистический алгоритм
20000
Адаптивный алгоритм
15000
10000
5000
0
1
2
3
4
5
6
7
Число вычислительных сервисов
Рис. 35. Сопоставление различных стратегий работы решающего сервиса.
В заключение отметим, что в области использования распределенных систем с параллельными вычислениями имеются огромные резервы
снижения стоимости и повышения качества управления сложными производственными комплексами. Можно ожидать быстрого расширения
сферы использования распределенных вычислительных систем в качестве техники управления.
4.6. Выводы
1. Поставлена общая задача использования специальных структур
алгоритмов управления с целью уменьшения вносимого ими информационного запаздывания; базой для построения таких структур выбрана распределенная система с параллельными вычислениями.
2. Спроектирована архитектура распределенной вычислительной системы для гетерогенных сетей на базе технологий RMI, Jini, JavaSpaces.
Разработана структура и реализованы обеспечивающие программные
116
компоненты, позволяющие проводить вычислительные эксперименты по
исследованию распараллеленных алгоритмов.
3. Предложена методика и на ее базе проведено исследование распределенных вычислительных систем, реализующих алгоритмы настройки САУ с ПИД-регулятором на основе генетических и поисковых алгоритмов.
4. Получены оценки быстродействия системы для различных параметров распределенной системы, в том числе: объема передаваемых данных, количества вычислительных, решающих сервисов и сервиса РСИП и
сделаны выводы по возможному использованию распределенных вычислительных систем.
5. Предложен способ улучшения работы распределенной вычислительной системы на основе разделения подзадач на два уровня и анализе
статистических данных о предистории работы системы.
117
ЗАКЛЮЧЕНИЕ
Основные результаты, полученные в работе, состоят в следующем:
1. Поставлена задача исследования САУ с учетом информационного
запаздывания, вносимого в систему техническими средствами сбора информации, ее обработки, расчета и реализации управляющих воздействий. Обоснована необходимость учета быстродействия, объема памяти
и разрядности цифровых технических средств реализации алгоритмов
управления. Выявлены новые свойства САУ с ИЗ.
2. Сформулированы принципы учета ограниченности ресурсов техники управления (быстродействия, памяти, разрядности) при решении
задачи проектирования цифровых систем управления. Разработана структура обеспечивающих компонентов программного комплекса, позволяющего проводить вычислительные эксперименты по исследованию влияния ИЗ на качество управления.
3. Предложены способы оценки информационного запаздывания, вносимого в систему управления техническими средствами с ограниченными
возможностями на этапе анализа и синтеза алгоритмов управления.
4. Разработана система показателей качества и характеристик алгоритмов, позволяющая сопоставить различные варианты алгоритмов и их
структурной организации с учетом вносимого ими информационного запаздывания.
5. Получены оценки вычислительной сложности различных алгоритмов управления многомерными объектами, в том числе: ряда вариантов
алгоритма, синтезированного методами аналитического конструирования
оптимальных
регуляторов;
пропорционально-интегральнодифференциального алгоритма управления с двумя вариантами адаптации параметров (на основе поиска экстремума показателя качества в пространстве настроечных параметров и на основе применения эволюционных методов улучшения настроек).
6. Предложена методика проведения вычислительных экспериментов
и определения области эффективного использования алгоритмов управления, синтезированных с учетом информационного запаздывания, а также обоснования использования технических средств для реализации алгоритмов управления.
7. Описана структура разработанного программного комплекса и
предложены группы вычислительных экспериментов для испытания различных вариантов алгоритмического обеспечения управления динамическими объектами в цифровых системах управления.
8. Приведены основные результаты исследований различных цифровых систем управления с учетом ограниченности ресурсов технических
средств и информационным запаздыванием.
118
9. Поставлена общая задача использования специальных структур
алгоритмов управления с целью уменьшения вносимого ими информационного запаздывания; базой для построения таких структур выбрана распределенная система с параллельными вычислениями.
10. Спроектирована архитектура распределенной вычислительной системы для гетерогенных сетей на базе технологий RMI, Jini, JavaSpaces.
Разработана структура и реализованы обеспечивающие программные
компоненты, позволяющие проводить вычислительные эксперименты по
исследованию распараллеленных алгоритмов.
11. Предложена методика и на ее базе проведено исследование распределенных вычислительных систем, реализующих алгоритмы настройки САУ с ПИД-регулятором на основе генетических и поисковых алгоритмов.
12. Получены оценки быстродействия системы для различных параметров распределенной системы, в том числе: объема передаваемых данных, количества вычислительных, решающих сервисов и сервиса РСИП и
сделаны выводы по возможному использованию распределенных вычислительных систем и улучшению их работы.
119
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
Александров А. Г. Оптимальные и адаптивные системы. – М.: Высшая школа, 1989. – 262 с.
Александров А. Г. Синтез регуляторов многомерных систем. – М.:
Энергия, 1986. – 272 с.
Аоки М. Оптимизация стохастических систем. – М.: Наука, 1971. – 424 с.
Артамонов Д. В. Модели и средства управления системами с переменными параметрами при наличии запаздывания: Дис. … канд. тех.
наук: 05.13.01. – Пенза, 1999. – 141 с.
Асанов М. С. О подходе к синтезу оптимальных алгоритмов управления стохастическими объектами при ограниченных быстродействиях устройств управления, сбора информации и реализации
управляющих воздействий. – В кн.: Адаптивное управление большими системами. – Фрунзе: Илим, 1981. – С. 144–152.
Асанов М. С. Оптимизация замкнутых систем управления с учетом
ограниченного быстродействия технических средств: Дис. … канд.
тех. наук: 05.13.01. – Фрунзе, 1984. – 184 с.
Асанов М. С., Брусиловский Р. Д., Крушель Е. Г. Двухуровневое агрегированное управление в условиях неполной информации. – В кн.:
Оптимизация динамических систем. – Минск, 1978. – С. 13–18.
Брайсон А. Хо Ю-ши. Прикладная теория оптимального управления.
– М.: Мир, 1972. – 544 с.
Буч. Г. Объектно-ориентированный анализ и проектирование с примерами приложений на С++, 2-е изд. / Пер. с англ. – М.: Бином, СПб.:
Невский диалект, 1999. – 560 с.
Воронов А. А., Рутковский В. Ю. Современное состояние и перспективы развития адаптивных систем // Вопросы кибернетики. Проблемы теории и практики адаптивного управления. – М.: Научный совет
по кибернетике АН СССР, 1985. – С. 5–48.
Говорухин В. Н., Цибулин В. Г. Введение в Maple V. Математический пакет для всех. – М.: Мир, 1997. – 208 с.
Гультяев А. К. MATLAB 5.3. Имитационное моделирование в среде
Windows. – М.: КОРОНА принт, 2001. – 400 с.
Дейкстра Э. Взаимодействие последовательных процессов // Языки
программирования. – М.: Мир, 1972. – С. 9–86.
Денисов А. И. Синтез оптимальных по быстродействию систем
управления методом малых приращений: Автореф. дис. …. канд.
техн. наук: 05.13.01. – Тула, 1999. – 22 с.
Дьяконов В. П. Maple 7. Учебный курс. – СПб.: Питер, 2002. – 672 с.
Дьяконов В. П. Mathcad 2001. Учебный курс. – СПб.: Питер, 2001. – 624 с.
120
17. Дьяконов В. П., Абраменкова И. В., Круглов В. В. Matlab 5 с пакетами расширений. – М.: Нолидж, 2001. – 880 с.
18. Дьячук А. В., Степанченко И. В. Оптимизация загрузки ресурсов
распределенной вычислительной системы // Прогрессивные технологии в обучении и производстве: Материалы II Всероссийской конференции. В 2 т. – Волгоград, 2003. – С. 277–280.
19. Емельянов В. В., Ясиновский С. И. Введение в интеллектуальное
имитационное моделирование сложных дискретных систем и процессов. Язык РДО. – М.: АНВИК, 1998. – 427 с.
20. Жалалов А. Применение теории линейных систем с квадратическим
критерием к управлению объектами с запаздыванием. в кн.: Применение вычислительных машин в системах управления непрерывными
производствами. – Фрунзе: Илим, 1975. – С. 46−59.
21. Земляков С. Д., Рутковский В. Ю. О некоторых результатах совместного использования принципов построения систем с переменной
структурой и адаптивных систем с эталонной моделью // Автоматика
и телемеханика, 1999, № 5. – С. 67–78.
22. Зотов М. Г. Аналитическое конструирование управляющих устройств
для объектов с запаздыванием // Автоматика и телемеханика, 1998,
№ 3. – С. 9–20.
23. Зотов М. Г. О многокритериальном конструировании управляющих
устройств // Приборы и системы управления, 1998, № 4. – С. 32–36
24. Изерман Р. Цифровые системы управления. – М.: Мир, 1984. – 541 с.
25. Исаев С. А. Разработка и исследование генетических алгоритмов для
принятия решений на основе многокритериальных нелинейных моделей: Автореф. дис. …. канд. техн. наук: 05.13.17. – Н. Новгород,
2000. – 18 с.
26. Искусственный интеллект: Применение в интегрированных производственных системах / Под ред. Э. Кьюсиака; Пер. с англ. А. П. Фомина;
Под ред. А. И. Дашенко, Е. В. Левнера. – М.: Наука, 1991. – 544 с.
27. Кваркернаак Х., Сиван Р. Линейные оптимальные системы управления. – М.: Мир, 1977. – 650 с.
28. Клир Дж. Системология. Автоматизация решения системных задач:
Пер. с англ. – М.: Радио и связь, 1990. – 544 с.
29. Ковалев А. А., Колмановский В. Б., Шайхет Л. Е. Уравнение Рикатти
в устойчивости стохастических линейных систем с запаздыванием /
Автоматика и телемеханика, 1998, № 10. – С. 35–54.
30. Койво Х. Н., Пузырев В. А. Самонастраивающиеся управляющие
устройства // Зарубежная радиоэлектроника, 1986, № 11. – С. 3–6
31. Красовский А. А., Буков В. Н., Шендрик В. С. Универсальные алгоритмы оптимального управления непрерывными процессами. – М.:
Энергия, 1977. – 272 с.
121
32. Крушель Е. Г., Степанченко И. В. О влиянии информационного запаздывания на качество управления // Актуальные проблемы развития г. Камышина: Тезисы докладов региональной межвузовской
научно-практической конференции. – Камышин, 1998. – С. 169–171.
33. Крушель Е. Г., Степанченко И. В. Программный комплекс для исследования цифровых систем управления с информационным запаздыванием // Датчики и системы. – 2002. – № 11. – С.12–14.
34. Кудрявцев Е. М. Mathcad 2000 Pro. – М.: ДМК Пресс, 2001. – 576 с.
35. Левин В. И. Структурно-логические методы исследования сложных
систем с применением ЭВМ. – М.: Наука, 1987. – 304 с.
36. Летов А. М. Аналитическое конструирование регуляторов / Автоматика и телемеханика, 1960, № 4, – С. 436–441; № 5, – С. 561–568;
№ 6, – С. 661–665; 1961, № 4, – С. 425–435.
37. Медведев В. С., Потемкин В. Г. Control System Toolbox. MATLAB
5 для студентов. – М.: Диалог – МИФИ, 1999. – 288 с.
38. Месарович М., Такахара Я. Общая теория систем: математические
основы / Пер. с англ. – М.: Мир, 1978. – 312 с.
39. Метод прямого поиска экстремума функции многих переменных (алгоритм Хука-Дживса): Методические указания / Сост. О.В. Барабашова, Е. Г. Крушель; Волгоград. гос. техн. ун-т. – Волгоград, 2000. – 16 с.
40. Методы классической и современной теории автоматического управления: Учебник в 3-х т. Т. 2: Синтез регуляторов и теория оптимизации систем автоматического управления / Под ред. Н. Д. Егупова. –
М.: Изд-во МГТУ им. Н. Э. Баумана, 2000. – 736 с.
41. Методы классической и современной теории автоматического управления: Учебник в 3-х т. Т.3: Методы современной теории автоматического управления / Под ред. Н. Д. Егупова. – М.: Изд-во МГТУ им.
Н. Э. Баумана, 2000. – 748 с.
42. Миркин Б. М. Адаптивное децентрализованное управление с модельной
координацией // Автоматика и телемеханика, 1999, №1. – С.
90–100.
43. Основы управления технологическими процессами / С. А. Анисимов,
В. Н. Дынькин, А. Д. Красавин и др.: под ред. Н. С. Райбмана. – М.:
Наука, 1978. – 440 с.
44. Острём К., Виттенмарк Б. Системы управления с ЭВМ: Пер. с англ. –
М.: Мир, 1987. – 480 с.
45. Очков В. Ф. MathCAD 7 Pro для студентов и инженеров. – М.: Компьютер Press, 1998. – 384 с.
46. Первозванский А. А. Математические модели в управлении производством. – М.: Наука, 1975. – 616 с.
47. Понтрягин Л. С., Болтянский В. Г., Гамкрелидзе Р. В., Мищенко Е.Ф. Математическая теория оптимальных процессов. – М.: Наука, 1976. – 392 с.
122
48. Прицкер А. Введение в имитационное моделирование и язык СДАМ II. –
М.: Мир, 1987. – 644 с.Справочник по теории автоматического управления / Под ред.
А. А. Красовского. – М.: Наука, – 1987. – 712 с.
49. Степанченко И. В. Автоматизация научных исследований систем
управления с квадратическим критерием // В сб. тезисы докладов IV
межвузовской конференции молодых ученых / ВолгГТУ, – Волгоград, 1998. – С. 177–179.
50. Степанченко И. В. Адаптивный алгоритм назначения подзадач в гетерогенной распределенной вычислительной системе // Математические методы в технике и технологиях: Сб. тр. XVI междунар. науч.
конф. в 10 т. Т. 6. Секции 9, 13 / Под общ. ред. В. С. Балакирева /
РГАСХМ ГОУ, Ростов н/Д, 2003. – С.119–122.
51. Степанченко И. В. Алгоритм выбора вычислительного ресурса в гетерогенной распределенной вычислительной системе // Математика,
компьютер, образование. Выпуск 10. Часть 2. Сб. науч. тр. / Под ред.
Г. Ю. Ризниченко. – Москва-Ижевск: Научно-издательский центр
«Регулярная и хаотическая динамика», 2003. – С. 17–25.
52. Степанченко И. В. Алгоритмы адаптации параметров регулятора,
функционирующие в распределенной вычислительной системе //
Идентификация систем и задач управления. SICPRO’04. Труды III
международной конференции. – М.: Институт проблем управления
им. В. А. Трапезникова РАН, 2004. – С. 1174–1194.
53. Степанченко И. В. Анализ вычислительных характеристик различных вариантов реализации алгоритмов управления дискретными динамическими процессами // Прогрессивные технологии в обучении и
производстве: Материалы Всероссийской конференции. – Камышин,
2002. – С. 170.
54. Степанченко И. В. Влияние отклонений параметров объекта от расчетных значений на область применения оптимальных систем // Прогрессивные технологии и их применение в решении проблем региона
и г. Камышина: Тезисы докладов региональной научно-практической
конференции. – Камышин: КТИ ВолгГТУ, 1999. – С. 93–95.
55. Степанченко И. В. Имитационное моделирование дискретных систем
управления с информационным запаздыванием // Математика. Компьютер. Образование. Вып. 8. Ч. II. Сб. науч. тр. / Под редакцией Г.
Ю. Ризниченко. – М.: Прогресс-Традиция, 2001. – С. 523–528.
56. Степанченко И. В. Исследование дискретных систем управления при влиянии ограниченности параметров технических средств // Наука Кубани.
Библиотека журнала: Сб. науч. тр. – Краснодар, 2001. – С. 201–212.
57. Степанченко И. В. Исследование распределенных алгоритмов управления с учетом ограниченности параметров технических средств //
Математика. Компьютер. Образование. Ч. 2. Сб. науч. тр. / Под редак123
58.
59.
60.
61.
62.
63.
64.
65.
66.
67.
68.
69.
70.
71.
цией Г. Ю. Ризниченко. – Москва-Ижевск: Научно-издатель-ский
центр «Регулярная и хаотическая динамика», 2002. – С. 573–583.
Степанченко И. В. Моделирование дискретных процессов управления динамическими объектами с учетом технических характеристик вычислительной системы
// Идентификация систем и задач управления.
SICPRO’03. Труды II международной конференции. – М.: Институт проблем управления им. В. А. Трапезникова РАН, 2003. – С. 1729–1755.
Степанченко И. В. Моделирование систем управления с квадратическим критерием в области влияния информационного запаздывания //
Математическое моделирование и компьютерные технологии: Тезисы докладов III Всероссийского симпозиума. Т.3 / КИЭП. – Кисловодск, 1999. – С. 12–15.
Степанченко И. В. Построение процедуры настройки дискретных систем управления с помощью адаптивного алгоритма прямого поиска //
Электротехнические комплексы и силовая электроника. Анализ, синтез
и управление: Межвуз. научн. сб. / СГТУ. – Саратов, 2001. – С. 63–68.
Степанченко И. В. Создание программного обеспечения для имитационного моделирования сложных дискретных систем управления //
Прогрессивные технологии в науке и производстве: Тезисы докладов
региональной межвузовской научно-практической конференции. –
Камышин, 2000. – С. 118–119.
Теория автоматического управления: Учебное пособие для вузов: В
2-х ч.: Под ред. Воронова А. А. – М.: Высшая школа, 1977. – 303 с.
Фомин В. Н., Фрадков А. Л., Якубович В. А. Адаптивное управление
динамическими объектами. – М.: Энергия, 1981. – 448 с.
Химмельблау Д. Прикладное нелинейное программирование. – М.:
Мир, 1975. – С. 157–163.
Цирлин А. М. Оптимизационное управление технологическими процессами, – М.: Энергоатомиздат, – 1986. – 400 с.
Четвериков В. Н. Подготовка и телеобработка данных в АСУ. – М.:
Высшая школа, 1981. – 320 с.
Чумаков А. В. Адаптивно-оптимальные регуляторы для объектов с запаздыванием: Дис. … канд. тех. наук: 05.13.01. – Тула, 1997. – 162 с.
Шварцман В. О., Емельянов Г. А. Теория передачи дискретной информации. – М.: Связь, 1979. – 424 с.
Alan W. Brown (ed.), Component-Based Software Engineering, IEEE
Computer Society, Los Alamitos, CA, 1996, –140 p.
Basic Reference Model of Open Distributed Processing. ISO/IEC
JTC1/SC212/WG7 CD 10746–1, International Standards Organization, 1992.
Birman K. P. The process group approach to reliable distributed computing. Comms. ACM, Vol. 36, № 12, 1993. pp. 36–53.
124
72. Cameron F., Seborg P. E. A self-tuning controller with a PID structure //
Int. J. Control. 1983 / Vol. 38. № 2, pp. 401–417.
73. Cheriton D. R. Preliminary thoughts on problem-oriented shared memory:
a decentralized approach to distributed systems. ACM Operating Systems
Review, Vol. 19, № 4, 1985. pp. 26–33.
74. Chung J. Y., Liu J.W.S., Lin K. J. Scheduling Real-time, Periodic Jobs
Using Imprecise Results, Proc. IEEE RTS, 1987. pp. 252–260.
75. Coulouris G., Dollimore J., Kindberg T. Distributed systems. Concepts
and design. – 3-d edition. Pearson Education Limited, 2001. – 772 p.
76. Dahlin E. B. Designing and Tuning Digital Controllers // Instruments and
Control System, 41, № 6, 1968. pp. 77–83.
77. Edwards W. K. Core Jini. – 2-d edition. Sun Microsystems Press, 2001. – 1004 p.
78. Freeman E., Hupfer S., Arnold K. JavaSpaces. Principles, patterns and
practice. Addison-Wesley Publishing Company, 2001. – 364 p.
79. Goldberg D. E. Genetic Algorithms in Search, Optimization and Machine
Learning, Addison-Wesley Publishing Company, 1989.
80. Grady Booch, Ivar Jacobson, and James Rumbaugh, Unified Modeling
Language 1.3, White paper, Rational Software Corp., 1998.
81. Grady Booch, Object Solutions, Addison-Wesley, 1995.
82. Ivar Jacobson, Magnus Christerson, Patrik Jonsson, and Gunnar Overgaard,
Object-Oriented Software Engineering – A Use Case Driven Approach, Wokingham, England, Addison-Wesley Publishing Company, 1992, 582 p.
83. Karr C. L. An Adaptive System for Process Control Using Genetic Algorithms / Int. Symp. on Artificial Intelligence in Real-Time Control,
IFAC/IFIP/IMACS preprints, Delft, Netherlands, 1992. pp. 585–590.
84. Monagan B., Geddes K. O., Heal K. M., Labahn G., Vorkoetter S. М.
Maple V Release 5. Programming Guide. Springer, 1998. – 380 p.
85. Mosberger D. Memory Consistency Models. Technical Report 93/1I, University of Arizona, 1993.
86. Philippe Kruchten, Rational Unified Process – An Introduction, AddisonWesley Publishing Company, 1999.
87. Porter B. and Jones A. H. Genetic Tuning of Digital PID Controllers /
Electronics Letters, Vol. 28, No. 9, 1992. pp. 843–844.
88. Saltzer J. H., Reed D. P., Clarke D. End-to-End Arguments in System Design,
ACM Transactions on Computer Systems Vol.2, № 4, 1984. pp. 277–288.
89. Tanenbaum A. S., M. van Steen. Distributed Systems. Principles and Paradigms. Prentice-Hall, 2002. – 827 p. (Русский перевод. Распределенные системы. Принципы и парадигмы / Э. Таненбаум М. ван Стеен. –
СПб.: Питер, 2003. – 877 с.)
90. Varsek A., T. Urbacic and B. Filipic. Genetic Algorithms in Controller
Design and Tuning / IEEE Trans. Sys. Man and Cyber., Vol. 23, No. 5,
1993. pp. 1330– 1339.
125
ПРИЛОЖЕНИЕ
Пример процедуры генерации дискретной модели и расширения
размерности пространства состояний
Пусть имеется следующая дискретная модель объекта без запаздывания
(*)
x[ s] Ax[ s 1] Bu[ s 1].
Зададимся произвольными матрицами параметров объекта управления второго порядка А и параметров канала выдачи управляющих воздействий B, которые являются постоянными во времени:
0.991 8.611
0.069
A
, B
,
0.002 0.733
0.013
и пусть информационное запаздывание равно 12 тактам. Тогда, используя прием расширения размерности пространства состояний, получим
T
T
T
T
T
X [ s] x[ s] z1[ s] z 2 [ s] ... z12 [ s] .
114
11
11
11
12
(**)
Расширенный вектор состояния (**) имеет размерность 114. Тогда
дискретная модель (*) примет форму:
(***)
X [ s] A X [ s 1] B u[ s 1],
где матрицы A размерности 1414 и B размерности 141 имеют следующий вид:
0.991 8.611 0.069
0.002 0.733 0.013
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
A
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 0 0 0
0 1 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0 0
0 0 0 1 0 0 0 0 0 0 0
0 0 0 0 1 0 0 0 0 0 0
,
0 0 0 0 0 1 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0 0
0 0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 1 0 0
0 0 0 0 0 0 0 0 0 1 0
0 0 0 0 0 0 0 0 0 0 1
0 0 0 0 0 0 0 0 0 0 0
126
0
0
0
0
0
0
0
B .
0
0
0
0
0
0
1
Используя одинаковое начальное состояние для (*) и (***) можно
получить полную идентичность процессов в объекте управления, описываемых уравнением (*) и (***).
Значение первой переменной
состояния
1000
800
600
400
200
0
1
16
31
46
61
Такт управления
Рис. Иллюстрируется совпадение моделей в обычном и расширенном
пространстве состояний.
127
76