от микросхемы до системы…
реклама

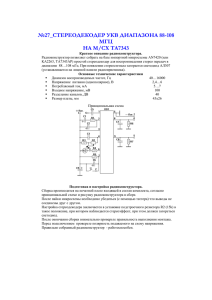
от микросхемы до системы… Решение по охране периметра объектов на основе ПАК «СОВА-ПЕРИМЕТР» Назначение – ПАК «СОВА-ПЕРИМЕТР» предназначена для работы в составе системы безопасности для наблюдения за периметром и прилегающей к нему территорией и выявления объектов нарушающих данный периметр. – Применяется для охраны объектов с повышенными требованиями к безопасности такими как: электростанции, аэропорты, морские порты, приграничные территории. от микросхемы до системы… Сферы применения Охрана пограничного контрольно-пропускного пункта Обеспечение охраны пограничных КПП, а так же контроль несанкционированного пересечения государственной границы человеком, группой людей или автомобилем. от микросхемы до системы… Сферы применения Охрана периметра большой протяженности Сети радиолокационных станций для охраны территорий и периметра большой протяженности. Информация о целевой обстановке отображается на автоматизированном рабочем месте оператора со всех РЛС, и видеокамер, что позволяет контролировать весь периметр и территорию объекта из единого центра. от микросхемы до системы… Структурная схема ПАК «СОВА-ПЕРИМЕТР» от микросхемы до системы… Состав ПАК «СОВА-ПЕРИМЕТР» – РЛС типа «Барсук» – Сервера обработки и отображения информации от РЛС – Сервер отображения сводной радиолокационной информации (РЛИ) – Роботизированные IP камеры видеонаблюдения – Стационарные камеры видеонаблюдения – Стационарные тепловизоры – Система датчиков периметральной охраны – Сервер объектовой видеоаналитики (СОВА) – Сервера обработки и хранения видеоданных – Система отображения от микросхемы до системы… РЛС «БАРСУК» Предназначен для автоматического обнаружения и распознавания наземных и надводных движущихся объектов: людей и техники. Обеспечивает охрану заданной зоны ответственности в любое время суток и года в условиях отсутствия оптической видимости. Дальность обнаружения объектов: – одиночный человек 1000 м – автотранспорт, плавсредство 1600 м – Пловец 200 м – малое плавсредство 500 м от микросхемы до системы… Принцип работы При обнаружении «цели» главным сервером РЛС передается на сервер системы видеонаблюдения информация о координатах цели и ёё скорости. Сервер системы видеонаблюдения пересчитывает полученные координаты в углу поворота (по горизонтали и вертикали) и коэффициент увеличения для соответствующих камер видеонаблюдения (каждая камера имеет свой сектор обзора В направлении на «цель» поворачивается как минимум одна камера, из отвечающих за данный сектор. В зависимости от скорости движения цели определяется увеличение, с которым на цель наводятся эти камеры. от микросхемы до системы…