Спекл-интерферометрический датчик движения для
реклама

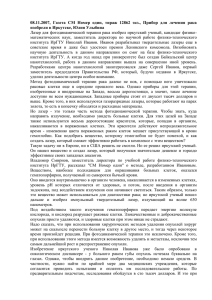
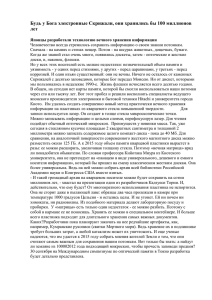
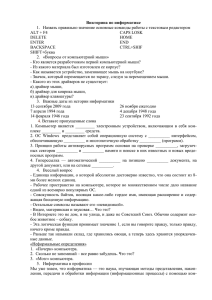
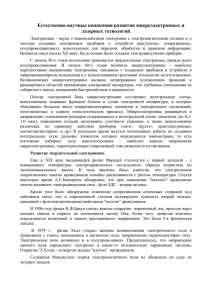
Федеральное Государственное образовательное учреждение высшего профессионального образования «Сибирский федеральный университет» Институт фундаментальной биологии и биотехнологии Отчёт по производственной практике Научный руководитель: Доцент: В.В. Салмин Выполнил: Студент 5-го курса: П.В. Лаврентьев ВВЕДЕНИЕ В данной работе будет рассмотрено одно из применений лазерных технологий на основе которой можно реализовать глубокую диагностическую программу, а также предложена сама технология диагностики тремора конечностей. Так как когерентное излучение обладает уникальными характеристиками, делается возможным измерить малые времена изменения любой величины, с очень большой точностью. Регистрация и измерение тремора позволяет: дать объективную оценку качества деятельности человека оператора; проводить экспертизу трудоспособности; определить предрабочее психофизиологическое состояние и готовность к деятельности; объективно оценить физическое и психоэмоциональное утомление, влияние лекарственных средств, запахов различных стимулирующих и экстрасенсорных воздействий, а также последствий применения этанола и наркотических средств. В медицине треморография дает возможность: произвести диагностику и дифференцировку различных видов тремора при психофизических напряжениях у здоровых и у больных лиц с различными неврологическими заболеваниями; Запись биопотенциалов с различных отделов головного и спинного мозга и периферической нервной системы совместно с треморографией дает возможность лучше понять механизм возникновения тремора и других заболеваний нервной системы; На сегодняшний день известны несколько видов треморографов (датчиков): акселерометрические датчики, измеряющие ускорение; индукционные датчики, измеряющие скорость перемещения; Для достижения, поставленной цели, были определены следующие задачи: Цель работы: разработка прибора для возможности более точного определения видов патологического тремора. изучить методы спекл – интерферометрии, непосредственно доработать прибор (заменить лазер на более эффективный) Создать биомеханическую модель руки с настраиваемой АЧХ для точной калибровки виртуального экрана данных и подбор регистрирующих и преломляющих элементов установки. Описание установки Установка состоит из трех основных частей: Лазер Матричный светочувствительный датчик Световозвращающая пленка Лазер Лазер установлен на плате мыши. Питание к лазеру подавалось через понижающую напряжение электрическую схему (драйвер) от USB кабеля, схема представлена на рисунке. Напрямую нельзя подключать лазер, так как напряжение от USB порта 5 В, а сила тока 450 – 500 мА, что превышает необходимые для лазера 4,5 В и 28 мА. 5 2 1 3 6 7 A 4 8 1 – конденсатор емкостью 1000 пФ, 2 - резистор сопротивлением 150 Ом, 3 – конденсатор емкостью 1000 мкФ, 4 – стабилитрон IN4 732 A 5T, 5 – резистор сопротивлением 30 Ом, 6 – Амперметр, 7 – резистор сопротивлением 50 Ом, 8 – лазер. В нашей работе использовался лазер с мощностью 3 мВт, длиной волны 650 нм, мы заменили его лазерным диодам из dvd-rw мощностью 245 мВт с такой же длинной волны, что позволило увеличить эффективность работы установки за счет стабильной мощности, которая не падала со временем. Вместе с новым лазером в установке, появился и новый драйвер необходимый для его эксплуатации. В драйвере используется микросхема LM317, которая включена стабилизатором тока. Принцип работы установки: Лазер расположен соосно с осью фотоприемника лазерной мыши, Луч отражаясь от световозвращающей пленки, попадает на приемный сенсор мыши и при перемещении ленты, получаем перемещение курсора на экране монитора. 2 3 1 – световозвращающая пленка, 2 – лазер, 3 – приемный сенсор лазерной мыши, 4 – компьютер. 4 Принцип работы матричного светочувствительного датчика: Схема работы оптической мыши Оптический сенсор не только делает снимки, но и обрабатывает их, так как содержит две ключевых части: систему получения изображения Image Acquisition System (IAS) и интегрированный DSP процессор обработки снимков. Анализ череды последовательных снимков (представляющих собой квадратную матрицу из пикселей разной яркости), интегрированный DSP процессор высчитывает результирующие показатели, свидетельствующие о направлении перемещения мыши вдоль осей Х и Y. В отличие от оптической мыши, лазерная способна получать более полную информацию о поверхности благодаря точечному нерассеянному световому потоку. Таким образом, лазерный сенсор способен анализировать каждую точку поверхности и четко задавать направление курсора. Изображения, получаемые лазерным сенсором, являются гораздо более четкими и контрастными. Именно поэтому лазерная мышь отлично функционирует даже на отражающих и неровных поверхностях. И так как в нашей установке задействован лазер, то матричный светочувствительный датчик будет регистрировать изменение спекл – картины лазерного излучения. Благодаря этому мы получим необходимые результаты. Формирование спекл – структур: Спеклы - это интерференционная картина нерегулярных волновых фронтов, образующаяся при падении когерентного излучения на сильно шероховатую поверхность. При когерентном освещении случайно–неоднородных объектов, таких, например, как шероховатая поверхность или прозрачная среда с флуктуирующим в пространстве показателем преломления, в рассеянном поле формируется спекл– структура Спекл – картина в поле дифракции лазерного пучка на шероховатой поверхности. Оптические схемы наблюдения спекл – картин: 1-источник света, 2 – случайно – неоднородный обьект или среда, 3 – схематичный вид продольного сечения слоя спекл – структуры, 4 – хаотически искаженный волновой фронт, 5 – изображающая оптическая схема. Корреляционная спекл – интерферометрия: Любая интерференционная картина представляет собой полосы корреляции интерферирующих полей. В корреляционной спекл – интерферометрии наблюдают полосы корреляции пространственных распределений интенсивностей, получаемых при интерференции спекл – модулированных волн. Схемы корреляционных спекл – интерферометров для измерения нормальных (а) и тангенциальных (б) смещений точек шероховатой поверхности объекта. 1 и 1' – освещающие лазерные пучки,2 – объект,3 – линза, 4 – опорный пучок, 5- полупрозрачное зеркало, 6 – плоскость регистрации, 7 – видиокамера, 8 – плата ввода изображений, 9 – компьютер, 10 – образец картины полос корреляции деформации изгиба на экране монитора. Биомеханическая модель руки: Создание биомеханической модели руки с настраиваемой АЧХ потребовалось для точной калибровки виртуального экрана данных и подбор регистрирующих и преломляющих элементов установки. 5 1 6 3 4 7 2 Представленная модель, может менять амплитуду колебаний от 1° до 45° при помощи изменения положения оси (5) на колесе (2), и за счет изменения длинны плеча (6) и (7). Частота колебаний световозвращающей пленки (1) меняется от 0 до 12 Гц за счет изменения напряжения в блоке питания (4). 1 – крепление для световозвращающей пленки, 2 – колесо для изменения амплитуды колебания, 3 – электропривод, 4 – электропитание, 5 - ось изменения амплитуды, 6 и 7 – плечи шатуна ВЫВОДЫ В ходе работы был изучен метод корреляционной спекл – интерферометрии. Изучен оптический датчик перемещений, использующий принцип корреляционной спекл-интереферометрии. Доработана лазерная составляющая прибора с заменой драйвера на более эффективный. Разработана модель биомеханической руки с настраиваемой АЧХ для калибровки экрана данных и подбора регистрирующих и преломляющих элементов установки. СПИСОК ЛИТЕРАТУРЫ Островский Ю.И., Бутусов М.М., Островская Г.В. Голографическая интерферометрия. М.: Наука, 1978. 336с. Джоунс Р., Уайкс К. Голографическая и спекл – интерферометрия / Пер. с англ. под ред. Г.В. Скроцкого. М.: Мир, 1986. 328 с. Франсон М. Оптика спеклов / Пер. с англ. под ред. Ю.И. Островского. М.: Мир, 1980. 171с. Сергиенко А.Б. Цифровая обработка сигналов. Спб.: Питер, 2003. 604 с. Франсон М. Оптика спеклов. М.: Наука, 1980. 171 с. http://samodelkyn.ucoz.ru /index/0-63.html