Л_05_Системы ав вления и регулирования
реклама

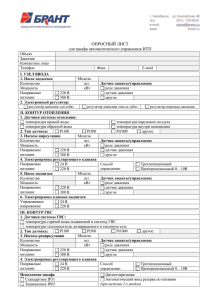
Лекция 5 «Основы ТАУ» « Системы автоматического управления и регулирования » 1. Классификация первичных информационных преобразователей 2. Структурная схема измерителя и его характеристика 3. Схема САР 4. Схемы регулирования температурного режима 5. Схемы автоматизации подачи топлива Первичные ИП Параметрические Эл.сопротивления Термо R Генераторные Магнитоэлектрич. Термоэлектрич. Тензо R Реостат Пьезоэлектрич. Электрохимич. Индукционные Электромехан. Емкостные Магнитострикц. Кодовые Частота Импульс Свет Цифровые Информацию о контролируемом или управляемом объекте наиболее удобно получать в виде электрической величины. Это позволяет использовать на последующих этапах электрическую аппаратуру — измерительные приборы, усилительнопреобразовательные устройства, исполнительные элементы, ЭВМ Преимущество электрических методов измерения связано с возможностью применения: 1. высокоточной и малоинерционной электрической измерительной аппаратуры; 2. передачи показаний на расстояние; 3. устройств автоматической регистрации и математической обработки данных; 4. информации, преобразованной в электрическую величину, в системах управления (регулирования); 5. в измерительных цепях систем автоматического управления и в системах контроля стандартной аппаратуры, что снижает стоимость, и упрощает проектирование и эксплуатацию этих устройств Статическая характеристика преобразователя • • • • • • Линейная Нелинейная Зона чувствительности Предел преобразования Избирательность Погрешность Характеристика САР • Замкнутые (с обратной связью) и разомкнутые САУ • Алгоритм управления - совокупность внешних организованных воздействий на объект, обеспечивающих заданный алгоритм его функционирования • САР = Объект регулирования + авторегулятор + цепь воздействия • Передаточная функция W(р) — это отношение преобразования Лапласа для выходной величины к преобразованию Лапласа для входной величины при нулевых начальных условиях • Экспериментальные динамические характеристики • Типовые возмущения — ступенчатое, импульсное и гармоническое Структурная схема САР температурного режима ДВС Автоматическое поддержание температурного режима ДВС – 80-85 гр. С Нагрузка Д И П У У Клапан ЭМ Д И П У У Принципиальная схема САРТ с использованием дискретных сигналов Электрическая принципиальная схема автоматического регулирования температуры воды объекта Автоматизация ТПН Плунжерная пара Впрыск бензина Ш Д ЭБУ 1 - ключ зажигания; 2 – разъем для подключения внешних средств диагностики; 3 - сигнал включения нейтральной передачи; 4 - сигнал включения кондиционера; 5 - сигнал скорости автомобиля; 6 - реле включения; 7 распределитель зажигания; 8 – катушка зажигания; 9 датчик аварийного падения давления масла; 10 - реле; 11 - электронный блок управления; 12 - шаговый двигатель системы управления частотой вращения коленчатого вала на холостом ходу; 13 - датчик расхода воздуха; 14 - датчик температуры поступающего в двигатель воздуха; 15 - регулятор давления; 16 - датчик угла открытия дроссельной заслонки; 17 клапан холостого хода; 18 - форсунка холостого хода; 19 – редукционный клапан; 20 - форсунка; 21 - таймер прогрева; 22 - датчик температуры охлаждающей жидкости; 23 - датчик детонации; 24 топливный фильтр; 25 - топливный насос; 26 - бак для топлива; 27 - датчик кислорода. Сущность регулирования Регулирование — это такой процесс, в ходе которого одна величина, называемая регулируемой, постоянно измеряется, измеренное значение сравнивается с значением другой величины, называемой задающей, и в зависимости от результата этого сравнения осуществляется воздействие на регулируемую величину с целью уменьшения различия между ней и задающей величиной. Данный процесс воздействий осуществляется в замкнутом контуре, называемом контуром регулирования или системой. По роду действия По признаку регулируемой величины: 1. температура, 2. расход, 3. давление, 4. уровень и т.д. Прерывные Непрерывные По способу действия Прямого действия Не прямого действия стабилизирующие — поддерживающие постоянным регулируемый параметр; программные — обеспечивающие заданное изменение регулируемого параметра во времени (задающее устройство этого регулятора называется программным); следящие — обеспечивающие закономерное изменение регулируемого параметра в зависимости от неизвестной заранее переменной величины (или нескольких величин). Если регулятор и регулирующий орган используют энергию, которая поступает только от измерительною устройства, то регулятор будет прямого действия. Если же какое-нибудь устройство регуляторе или регулирующий орган используют энергию внешнего источника, то регулятор будет непрямого действия. По виду используемой вспомогательной энергии регуляторы непрямого действия делятся на: электрические, гидравлические, пневматические и комбинированные. По установившемуся значению регулируемого параметра (после окончания переходного процесса) регуляторы бывают статические и астатические. По числу фиксированных положений (позиций) paзличают двух-, трех- и многопозиционные регуляторы. По скорости перемещения регулирующего органа различают регуляторы: с мгновенным практически перемещением — позиционные регуляторы релейного действия; с постоянной скоростью перемещения, не зависит от абсолютного значения рассогласования — регуляторы релейного действия; с переменной скоростью, зависящей от знака и величины рассогласования часто и от его интеграла или (и) от производной); с вибрационным (скользящим) режимом у регуляторов релейного действия — вибрационные регуляторы. Если регулирование процесса осуществляется лишь по одному параметру, то оно называется одномерным. Если же у процесса имеется два и более регулируемы» параметров, то регулирование называется многомерным. По области своего применения регуляторы делится на индивидуальные, специализированные и универсальные. Типовые внешние возмущения: Единичный скачок Единичный импульс Гармонический Непрерывновозрастающий сигнал сигнал В состав автоматического регулятора АР входят следующие основные устройства: задающее, измерительное, сравнивающее, преобразующее и исполнительное. Регулирование по отклонению: В АСР, работающих по отклонению, сначала происходит измерение значения величины, которая подлежит регулированию в данном объекте, затем это значение сравнивается с заданным, и если есть расхождение, то на объект регулирования подается воздействие, приводящее к выравниванию значения регулируемого параметра. Указанный принцип иногда называется компенсационным принципом Ползунова—Уатта. Он является основным для большинства современных автоматических регуляторов. Регулирование по возмущению Комбинированное регулирование