UM FEM: моделирования динамики упругих тел
реклама

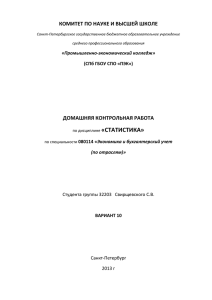
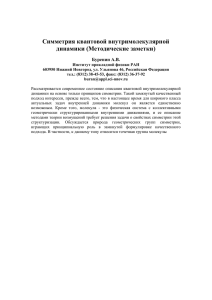
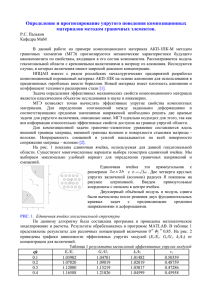
Общие сведения Программный комплекс «Универсальный механизм» Модуль UM FEM: Моделирование динамики упругих тел Лаборатория «Вычислительная механика», БГТУ, Брянск www.umlab.ru, um@umlab.ru Назначение модуля – моделирование динамики упругих тел, подверженных произвольным пространственным перемещениям. При этом упругие перемещения за счет деформаций полагаются малыми. Учет упругости отдельных частей конструкций позволяет уточнить результаты твердотельного моделирования. Одна из областей эффективного применения модуля исследования вибраций кузова или рамы железнодорожного экипажа при движении с учетом воздействий от силового оборудования и неровностей пути. UM FEM: моделирования динамики упругих тел 1 Возможности модуля UM FEM UM FEM импортирует данные из программ расчетов методом конечных элементов (ANSYS, NASTRAN). UM FEM позволяет решать следующие задачи. • Исследование динамики упругого тела в составе механической системы. Интегрирование уравнений движения (расчет перемещений, скоростей, ускорений точек упругого тела, расчет сил, действующих на упругое тело, и других параметров процесса движения). Расчет собственных частот и форм механической системы с учетом характеристик упругого тела. • Исследование напряженно-деформированного состояния упругого тела в процессе интегрирования уравнений движения. • Экспорт данных динамического анализа в программы МКЭ для расчета напряженно-деформированного состояния • Экспорт данных в программный модуль UM Durability для формирования блоков нагружения и расчета долговечности детали конструкции. UM FEM: моделирования динамики упругих тел 2 Примеры объектов исследований с использованием UM FEM Автомотриса АС4 с упругим кузовом Щебнеочистная машина ЩОМ 1200 с упругой рамой Тепловоз ТЭМ21 с упругой рамой тележки Платформа для перевозки крупнотоннажных контейнеров с упругой рамой UM FEM: моделирования динамики упругих тел 3 Теоретические основы Модели механических систем, содержащие абсолютно твердые и упругие тела, называются гибридными моделями Основные методы, составляющие методику моделирования упругих тел, реализованную в UM FEM • Метод подсистем • Метод присоединенной системы координат • Метод конечных элементов • Метод связанных подструктур Каждое упругое тело механической системы полагается отдельной подсистемой и может взаимодействовать с другими телами и подсистемами объекта, в том числе упругими, посредством шарниров и силовых элементов. Малые упругие перемещения представляются преобразованным набором собственных и статических форм упругого тела UM FEM: моделирования динамики упругих тел 4 Метод подсистем Идеализация механической системы Общий вид уравнений движения подсистемы Внешний силовой элемент 4 Силовые элементы 5 3 2 шарнир fike (qi , q i , q k , q k , t ) GTik (qi , qk , t )λ ik k k gik (qi , q k , t ) 0, k K (i ) z0 Тела O M i (qi )q i k i (qi , q i , t ) fi (qi , q i , t ) y0 1 x0 Каждое упругое тело механической системы полагается отдельной подсистемой и может взаимодействовать с другими телами и подсистемами объекта, в том числе упругими, посредством шарниров и силовых элементов. UM FEM: моделирования динамики упругих тел 5 Метод присоединенной системы координат Метод присоединенной системы координат (ПСК) Моделирование произвольного пространственного движения упругих тел совместно с малыми упругими перемещениями В рамках подхода применяются: • метод конечных элементов • модальный подход Обобщенные координаты r q φ w T Положение узла в СК0 rk( 0) r1( 0) A 01 (ρ(k1) Основные допущения 1. В системе координат 1 тело описывается методом конечных элементов. 2. Силы инерции прикладываются в узлах: d (k1) ) 1 1 vT vdV (mk vTk v k ωT J k ω) 2V 2 nodes 3.Малые упругие перемещения в СК1 выражаются через формы упругого тела: H x h j w j Hw j 1 UM FEM: моделирования динамики упругих тел 6 Метод связанных подструктур Малые упругие перемещения представляются преобразованным набором собственных и статических форм упругого тела Этапы реализации метода Интерфейсные и внутренние узлы конечно-элементной сетки 1. Выбор интерфейсных узлов конечно-элементной модели упругой подсистемы. В качестве интерфейсных узлов следует выбирать узлы, в которых крепятся шарниры, либо силовые элементы. M ii xi x M M bi x b M ib Cii C M bb Cbi Cib Cbb 2. Последовательный расчет Nin*Ndof статических форм. Nin – число интерфейсных узлов. Ndof – число степеней свободы в каждом узле. S Cii1Cib Узлы: -интерфейсные, -внутренние Статическая форма – упругая форма подсистемы от единичного смещения в направлении одной из степеней свободы в интерфейсном узле. При этом остальные степени свободы в интерфейсных узлах закреплены. UM FEM: моделирования динамики упругих тел 7 Метод связанных подструктур 3. Расчет Nef собственных форм подсистемы при закреплении в интерфейсных узлах. Число Nef выбирается исследователем, исходя из целей и необходимой точности решения задач. 4. Построение модальной матрицы подсистемы Y S H 0 E Y – столбцы собственных форм подсистемы S – столбцы статических форм E – единичная матрица 5. Построение обобщенных матриц упругой подсистемы C HT CH M HT MH Размер обобщенных матриц Nin*Ndof+Nef 6. Преобразование упругих форм - ортонормализация базиса модального пространства. ( C M ) y 0 H H Y UM FEM: моделирования динамики упругих тел 8 Примеры статических и собственных форм Формы упругого стержня с двумя интерфейсными узлами по краям Статическая форма упругого стержня от единичного поворота вокруг оси Y 2 1 y z x y Собственная форма упругого при закреплении интерфейсных узлов 2 1 z x y UM FEM: моделирования динамики упругих тел 9 Пример построения модели упругого тела уравнений движения 5.Интегрирование Преобразования упругих форм балки Общий 3. Выбор Расчет статических форм 4. Расчет собственных формвид приобъекта фиксированных интерфейсных узлах 1. Конечно-элементная модель упругой балки 2. интерфейсных узловисследований Интерфейсный узел на левом торце балки z x y UM FEM: моделирования динамики упругих тел 10 Программная реализация методики Основные этапы подготовки модели и анализа динамики упругих тел в составе механических систем 1. Описание упругого тела в программе конечно-элементного анализа. 2. Выбор интерфейсных узлов, расчет статических и собственных форм упругого тела в соответствии с методом связанных подструктур. 3. Импорт и преобразование данных, необходимое для построения упругой подсистемы. 4. Добавление упругого тела в качестве подсистемы в состав модели объекта исследований. 5. Моделирование: интегрирование уравнений движения, линейный анализ. Этапы 1-2 реализуются в программе конечно-элементного анализа ANSYS Состав программного обеспечения UM FEM Макрос UM.mac на языке APDL. Программа преобразования данных ANSYS_UM.exe. Мастер подготовки данных упругих тел, встроенный в программу UMInput.exe. Модуль ввода исходных данных упругих подсистем, встроенный в программу UMInput.exe. Модуль моделирования динамики упругих подсистем, встроенный в программу UMSimul.exe. UM FEM: моделирования динамики упругих тел 11 Программная реализация методики ANSYS 1. Описание упругого тела методом конечных элементов 2. Выбор интерфейсных узлов 3. Запуск макроса UM.mac ANSYS_UM.exe Преобразование формата данных Расчет обобщенных матриц масс и жесткости Ортогонализация форм, исключение твердотельных форм Mакрос UM.mac • Расчет набора статических и собственных форм • Расчет матрицы масс свободного тела input.fum input.fss input.fum – промежуточный файл данных упругой подсистемы, в котором хранятся непреобразованные формы input.fss – файл данных упругой подсистемы, готовых к моделированию UM FEM: моделирования динамики упругих тел 12 Программная реализация методики Мастер подготовки данных упругих подсистем. Реализован как инструмент программы UMInput.exe. Визуальный контроль данных Исключение некоторых форм из набора Ортогонализация форм, исключение твердотельных форм UMInput.exe Ввод исходных данных, добавление упругой подсистемы, компоновка составного объекта. Синтез и компиляция уравнений движения. input.fum из ANSYS_UM.exe input.fss input.fss UM FEM: моделирования динамики упругих тел input.dat 13 Программная реализация методики UMSimul.exe Моделирование динамики механической системы: интегрирование уравнений движения, линейный анализ и т.д. UM FEM: моделирования динамики упругих тел 14 Тестирование методики и программного обеспечения Частоты закрепленной балки Фор мы Ф1 Ф2 Ф3 Ф4 Ф5 Ф6 Тип закрепления 1 2 3 4 Т Р Т Р Т Р Т 26.67 26.66 26.67 26.66 4.190 4.191 11.76 73.45 73.47 73.45 73.49 26.26 26.26 47.05 73.55 73.51 105.88 144.12 144.02 188.23 294.10 423.51 5 Р Т 11.76 18.41 47.04 59.58 105.82 124.25 188.08 293.76 422.82 UM FEM: моделирования динамики упругих тел Р 18.38 59.54 124.20 15 Тестирование методики и программного обеспечения Тестовая модель кривошипно-ползунного механизма с упругим шатуном Сила реакции в шарнире кривошип-шатун M K M K Способы представления шатуна: 1) абсолютно твердым телом; 2) методом твердотельных элементов (11 тел); 3) упругой балкой (100 элементов). Угловое ускорение кривошипа , c -2 Метод твердотельных элементов Упругое тело представляется системой абсолютно твердых тел связанных шарнирами с упругодиссипативными элементами. t, c 2 1 3 UM FEM: моделирования динамики упругих тел 16 Тестирование методики и программного обеспечения Интегрирование уравнений движения UM FEM: моделирования динамики упругих тел 17 Тестовое моделирование автомотрисы АС4 Упругая подсистема «Кузов». Узлов 1273, конечных элементов 2481, степеней свободы 7474 Твердотельная подсистема «колесная пара». 1 – колесная пара, 2,4 –внешние линейные упругие силовые элементы, 3 – внешний нелинейный диссипативный элемент UM FEM: моделирования динамики упругих тел 18 Результаты тестового моделирование автомотрисы АС4 СКО значений вертикальных виброускорений рамы Рамные силы в кривой R=300 м, V=80 км/ч 2.0 м/с2 3 1.5 Ровный путь 2 1 1.0 0.5 V км/ч 0.0 20 40 60 80 100 Неровный путь 2.0 м/с 2 3 1.5 2 1.0 1 0.5 V км/ч 0.0 20 40 60 80 100 Нумерация графиков: 1 – 6 собственных форм, 2 – 24 собственные формы, 3 – 70 собственных форм UM FEM: моделирования динамики упругих тел 19 Результаты тестового моделирование автомотрисы АС4 Спектральная плотность мощности вертикальных виброускорений 1 – 6 собственных форм, 2 – 24 собственные формы, 3 – 70 собственных форм СКО виброускорений рамы под серединой салона, представленное разложением в ряд по формам колебаний 0.6 0.5 0.4 0.3 0.2 0.1 0.0 1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 UM FEM: моделирования динамики упругих тел 55 58 61 64 67 70 20 Пример построения гибридной модели платформы Твердотельные подсистемы «Контейнер» Упругая подсистема «Рама платформы»: 15748 узлов 15324 кон. элементов Твердотельные подсистемы «Тележки» Гибридная модель платформы с контейнерами UM FEM: моделирования динамики упругих тел 21 Расчет собственных частот и форм платформы Собственная форма колебаний платформы с частотой 3.57 Гц Собственная форма колебаний платформы с частотой 4.55 Гц UM FEM: моделирования динамики упругих тел 22 Расчет напряжений в процессе интегрирования уравнений движения UM FEM: моделирования динамики упругих тел 23 Заключение Спасибо за внимание UM FEM: моделирования динамики упругих тел 24