Цифровая (дискретная) амплитудная модуляция
реклама
 амплитудная модуляция")
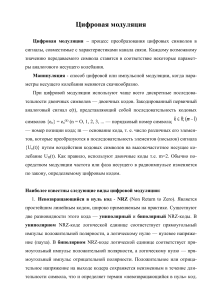
Дискретная модуляция Модулирующий (первичный) сигнал имеет на интервале времени постоянное значение, а при переходе к следующему интервалу меняется скачкообразно. u (t ) u (t ) t u (t ) t t Дискретная (цифровая) модуляция называется также манипуляцией Посылки отличаются друг от друга некоторыми параметрами 2 Выбор элементарного сигнала (посылки) Обозначим посылку v(t , b) b значение цифрового модулирующего сигнала (канальный кодовый символ), так что сигнал цифровой модуляции имеет вид bц (t ) v t nTп , bn n bn n-й символ в кодовой последовательности, Tп длительность посылки. u (t ) u (t ) t u (t ) t t 3 1. Посылка имеет прямоугольную форму: в этом случае сигнал цифровой модуляции имеет наиболее простой вид. Однако спектральная плотность прямоугольного импульса нефинитна (на графике – модуль !): 4 Полоса пропускания любого канала конечна: (полоса 20 – 30) 5 Чем уже полоса пропускания канала, тем сильнее межсимвольная интерференция (полоса 22,5 – 27,5) 6 Чем уже полоса пропускания канала, тем сильнее межсимвольная интерференция (полоса 23,75 – 26,25) 7 Другой крайний случай – посылка с прямоугольной спектральной плотностью, занимающей всю полосу частот данного канала sin 2 Fвt v(t ) 2 Fв 2 Fвt для полосы Fв , Fв Если решение о принятом символе принимается по единственному отсчету наблюдаемого колебания и этот отсчет берется через интервал 1/(2F), то межсимвольная интерференция не влияет на правильность решений 8 Часто в качестве посылки принимают «колокольный» импульс гауссовской формы v(t ) Ae t 2 со спектральной плотностью V ( f ) Be где f 2 B A /, 2 / 9 Цифровая (дискретная) амплитудная модуляция (ЦАМ, ДАМ), или амплитудная манипуляция uЦАМ (t ) U m K АМ bnv t nTп cos(0t 0 ) n K АМ коэффициент, управляющий глубиной амплитудной манипуляции Демодуляцию сигнала можно осуществить при помощи синхронного детектора либо нелинейных амплитудных детекторов, как для обычной амплитудной модуляции, с последующим принятием решений о переданных кодовых символах Задача построения наилучшего (оптимального) демодулятора для ЦАМ-сигналов будет рассматриваться в следующем семестре 10 Если положить в выражении uЦАМ (t ) U m K АМ bnv t nTп cos(0t 0 ) n U m 0, получится ЦАМ без несущей, или ЦБАМ При условии соблюдения когерентности (т.е. при известной и неизменной начальной фазе несущего колебания) можно передавать по одному каналу два ЦАМ-сигнала по квадратурной схеме (цифровая квадратурная модуляция ЦКАМ): uЦКАМ (t ) bц1(t )cos(0t 0 ) bц2 (t )sin(0t 0 ) на приемной стороне разделение сигналов осуществляется парой синхронных детекторов. 11 Цифровая (дискретная) фазовая модуляция (ЦФМ, ДФМ) или фазовая манипуляция Простейшим видом ЦФМ является двоичная фазовая манипуляция uЦФМ (t ) U m cos(0t 0 (t )) (t ) равно 0 или радиан в зависимости от передаваемого символа (0 или 1) u (t ) То же самое можно записать uЦФМ (t ) bц (t )U m cos(0t 0 ) bц (t ) принимает значения +1 или –1 t Это означает, что двоичный ЦФМ-сигнал совпадает с результатом балансной амплитудной модуляции гармонического переносчика ступенчатым сигналом со значениями +1 и –1. Демодуляция может быть выполнена синхронным детектором, для работы которого необходимо знание несущей частоты и начальной фазы 12 Поскольку при БМ модулированный сигнал не содержит несущего колебания, на приемной стороне канала используется восстановление несущей частоты при помощи возведения сигнала в квадрат и последующего деления частоты полученного колебания на 2 При этом, однако, имеет место неоднозначность начальной фазы с точностью до 180º, что приводит к так называемой обратной работе Методы борьбы: 1. зондирование канала пилот-сигналом 2. относительная фазовая манипуляция (ОФМ) 13 Цифровая (дискретная) частотная модуляция (ЦЧМ, ДЧМ) или частотная манипуляция Частотная манипуляция может быть выполнена, например: 1. поочередным подключением к каналу выходов нескольких генераторов гармонических колебаний разных частот. При каждом переключении фаза канального сигнала в общем случае терпит разрыв. Прохождение такого сигнала через инерционные линейные устройства (например, фильтры) сопровождается переходными процессами, приводящими к возникновению паразитной амплитудной модуляции и ухудшающими пик-фактор отношение максимальной (пиковой) мощности сигнала к его средней мощности. 2. на практике получили распространение методы цифровой частотной модуляции с непрерывной фазой (ЧМНФ); при этом изменение частоты в соответствии с дискретным модулирующим сигналом производится не скачком, а по непрерывному (например, гауссовскому) закону путем изменения частоты генератора колебания. 14 Импульсная модуляция Импульсная модуляция Переносчик имеет вид периодической последовательности импульсов одинаковой формы Модулирующий сигнал является аналоговым. Фактически при импульсной модуляции параметрами переносчика управляют дискретные отсчеты первичного сигнала Для того, чтобы была возможна передача информации без потерь, частоту следования импульсов переносчика следует выбирать исходя из ширины спектра модулирующего сигнала в соответствии с требованиями теоремы отсчётов. 16 Виды модуляции различаются в соответствии с изменяемыми параметрами: АИМ ШИМ (ДИМ) ВИМ, ЧИМ 17 Спектр АИМ-сигнала s(t ) d (t nT ) переносчик n d (t ) короткий импульс известной формы s(t ) k Сk e jk t 2 T Спектральная плотность переносчика S ( ) Fs(t ) S ( ) F Сk e jk t 2 Сk ( k ) k k 2 0 2 18 Если x и (t ) x(t ) s(t ) 1 Xи ( ) 2 1 2 X( )S ( )d X( ) 2 Ck ( k )d Ck X( k ) k k - представляет собой совокупность копий спектральной плотности первичного сигнала, сдвинутых по частотной оси и умноженных на весовые коэффициенты T , , K ( ) U T T 0 в противном случае 0 КЧХ фильтра, выделяющего НЧ сигнал (демодулятора) компенсируется коэффициент C0 U T 19