Y(n)
реклама
")
План лекции 4
лекция 4
Теория дискретных линейных систем
Разностные уравнения
Z-преобразование и его свойства
Представление ЛПП-систем в Z-области
Линейные системы
Определение: Линейная система - это система, к которой
применим принцип суперпозиции:
Если X1(n) и X2(n) - некоторые входные
последовательности, а Y1(n) и Y2(n) - соответствующие
им выходы ЛС,
то при подаче на вход последовательности aX1(n) +
bX2(n)
на выходе образуется последовательность aY1(n) +
bY2(n), где а и b - произвольные постоянные
X(n)
Y(n)
ЛС
лекция 4
Линейные системы с постоянными параметрами
Определение: система с постоянными параметрами
(ЛПП-система) характеризуется тем, что если входной
последовательности X(n) соответствует выход Y(n), то
входной последовательности X(n-n0) при любых n0
соответствует на выходе Y(n-n0). Это свойство еще
называется инвариантностью во времени.
X(n-n0)
лекция 4
ЛПП
Y(n-n0)
Простые дискретные ЛПП системы
x(n)
z(n) = x(n) y(n)
+
K
б) Усилитель
y(n)
a) Сумматор
y(o)
x(n)
в)накопитель
y(n)=x(n-1)
x(n)
D
лекция 4
y(n) = Kx(n)
x(n)
Соотношение вход-выход во времени
h(n) - откликом системы на единичный импульс (n)
параметры системы постоянны, поэтому
h(n-m) будет откликом на воздействие (n-m)
Из свойства линейности следует, что откликом на
воздействие x(m)(n-m) будет последовательность x(m)h(nm)
Поэтому выходной отклик на произвольную входную
последовательность будет определяться дискретной
сверткой
y(n)
x ( n)
x(k ) (n k )
h(n)
k
y ( n)
лекция 4
m
m
x(m) h(n m) h(m) x(n m)
Свойства ЛПП-систем
Определение: ЛПП - систему называют физически
реализуемой, если выход при n=n0 зависит только
от отсчетов входного сигнала x(n) при nn0 , а это
означает, что h(n)=0 при n<0.
Определение: ЛПП - система называется устойчивой, если
при любом ограниченном входном воздействии выход
системы также ограничен.
Необходимое и достаточное условие устойчивости:
h(m)
m
лекция 4
Разностное уравнение
Линейное разностное уравнение М-го порядка,
связывающее входной сигнал x(n) с выходным y(n):
M
a
k 0
k
y (n k )
y ( n)
M
b x(n k ),
k 0
M
b
k 0
k
k
M
n0
x(n k ) a k y (n k ),
n0
k 1
Решать разностное уравнение необходимо потому, что
оно описывает взаимосвязь вход-выход ЛПП-систем
лишь в неявной форме
лекция 4
Использование разностного уравнения
Значение разностных уравнений состоит в том, что они
непосредственно определяют способ построения
цифровой системы.
Разностное уравнение первого порядка:
y(n) a1 y(n 1) b0 x(n) b1 x(n 1)
D
b1
y(n)
b0
x(n)
-a1
лекция 4
D
Z-преобразование
Определение: Одностороннее Z-преобразование
последовательности x(n) определяется
соотношением
X ( z ) x ( n) z n
n0
где z = r exp (j ) - комплексная переменная
Im(z)
r0
Re(z)
лекция 4
Область
сходимости
Z-преобразование простых последовательностей
Пример 1. Z- преобразование единичного импульса (n).
Поскольку x(n)=0 при любых n, за исключением n=0, где x(n)=1,
то X(z) =1
Пример 2. Z-преобазование задержанной функции единичного
отсчета (n-k) равно z-k.
Пример 3. Z- преобразование единичной последовательности
u0(n). Поскольку x(n)=0 везде, кроме n0, где x(n)=1, то
X ( z) z
n0
n
1
1 z 1
X(z) сходится при |z|>1, имеется одна особая точка (полюс) при
z=1.
лекция 4
Свойства Z-преобразования
Линейность
y(n) = ax1(n)+ bx2(n)
Y(z) = aX1(z)+ bX2(z)
2. Задержка последовательности.
Если Z{x(n)} = X(z) и x(n)=0 при n< 0, то y(n) = x(n-N) имеет Zпреобразование
Y(Z) = z-N X(z)
3. Умножение на n.
Если y(n)=nx(n), тогда Y(Z) = - zdX(z)/dz
4. Умножение на экспоненту.
Если y(n) = an x(n), тогда Y(Z) = X(a-1 z)
5. Свертка последовательностей.
Если Z{x1(n)} = X1(z) и Z{(x2(n)} = X2(z), тогда свертка
последовательностей имеет Z- преобразование
Y(z)= X1(z)X2(z).
лекция 4
Свойства ЛПП-систем
Свойство свертки Z-преобразования имеет очень важное
следствие:
если y(n) и x2(n) являются соответственно выходом и
импульсной
характеристикой h(n) ЛПП-системы, то
Y(Z) = X(z)H(z),
(1)
где H(z) - Z-преобразование импульсной характеристики,
которая
называется передаточной характеристикой системы
X(z)
Y(z)
H(z)
Из (1) получим H(z) = Y(z)/X(z).
лекция 4
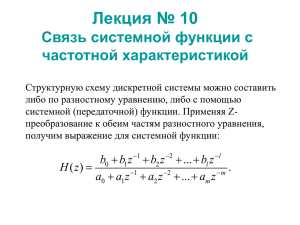
Решение разностных уравнений
Z- преобразование является удобным аппаратом для решения
разностных уравнений с постоянными коэффициентами.
Применив Z- преобразование к обеим частям уравнения М-го
порядка
M
a
k 0
k
y (n k )
M
b x(n k ),
k 0
k
n0
и используя свойства линейности и задержки, получим
линейное разностное уравнение М-го порядка, связывающее
входной
сигнал x(n) с выходным y(n):
M
M
m
m
a
z
Y
(
z
)
b
z
m
m X ( z)
m 0
лекция 4
m 0
Решение разностного уравнения
Y(z) и X(z) - Z-преобразования
последовательностей y(n) и x(n).
Учитывая, что Y(z)= H(z)X(z), находим
M
m
b
z
m
H ( z) m 0
M
m
a
z
m
, a0 1
m 0
Применив обратное Z-преобразование к Y(z) можно
найти y(n) по известным x(n) и H(z)
лекция 4