Задачи создания замкнутой системы управления «Природа-Техногеника» Сольницев Р.И.
реклама

Задачи создания замкнутой
системы управления
«Природа-Техногеника»
Сольницев Р.И.
По мнению федеральных экспертов нормы токсичного
загрязнения возрастают до 15-16 % в год. Некоторые из
них трансграничные загрязнения.
Концепция предложенная и разработанная авторами
создание замкнутых систем управления «ПриродаТехногеника» при применении широкого класса объектов,
минимизируют техногенные загрязнения.
Особенности деталей концепции представлены тремя
критериями:
•Минимизация или полное уничтожение «человеческого
фактора»
•контроль за концентрацией загрязнений;
•Сохранение существующей технологии производства.
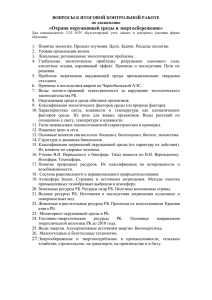
Замкнутая система управления “Природа-Техногеника”
Сенсор1
СенсорN
Сенсор2
Информационноизмерительная
система
Нормативноправовое
обеспечение
Сети
Σ
Контроллер
Управляющее
устройство
ЛПР
Федеральной
службы
Устройства
визуализации
ЛПР
ЛПР
Природа
(земля,
вода,
воздух)
Предприятие
ЗВ
Производство
Отдел охраны
окружающей
среды
Руководител
ь
предприятия
Человеческий
фактор
Монитор
инг
Отдел
управления
природными
ресурсами
Комитет по
охране
окружающей
среды
Администр
ация города
Отходы
От
переработки
продукции j –го
предприятия
Природа
(земля,
вода,
воздух)
Мониторинг
(приборы
измерения
и
обработки)
Сырье
i-е предприятие
i = 1,n
службы
j-ое -Предприятие
Отходы
загрязнения
Продукция
Очистные
агрегаты
Управление
ЗСУПТ
(приборы
управления,
усиления и
преобразования)
Критерии,
Ограниче
ния
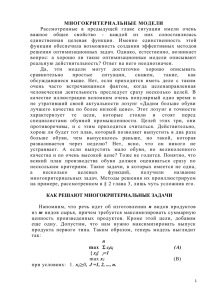
Блок анализа
Измерительный блок
Д1
Д2
ОУ
УПУ
КУ
УСИ1
УВПИ
УВЧХ
УСИ2
Дn
Блок регистрации
Блок визуализации
УР1
УФ1
УУВ
УВ
ЛПР,
оператор
УФ2
УУР
УРN
Исполнительные устройства
Блок управления
ЭМИУ
УФЗУ
УР
УИУ
ПИУ
ГИУ
ФХИУ
ОУ
Дi , i=1,N – датчики информации по ЗВ
КУ – коммутирующие устройства
УПУ – усилительно-преобразующие
устройства
УСИ – устройства сжатия информации
УВЧХ – устройства вычисления частотных
характеристик
УВПИ – устройства выбора предпочтительной
информации
УФ – устройства формирования
УУВ – устройства управления визуализацией
УВ– устройства визуализации
УУР – устройства управления регистраторами
УРi i=1,N – устройства регистрации
УФЗУ – устройства формирования закона
управления
УР – устройства регулирования
УИУ – управление исполнительными
устройствами
ЭМИУ, ПИУ, ГИУ, ФХИУ –
электромеханические , пневматические,
гидравлические, физико-химические
исполнительные устройства
ОУ – объект управления
Математические модели ЗСУПТ.
L{Y(X, Λ, t)} =E(X, t), X є D, t є 0,T
B{Y(X, Λ, t)} =G(X, t), X є D, t є 0,T
(1)
I {Y(X, t)} =Y0(X, t), X є D, t=0
где:
L-оператор объекта управления
B-оператор краевых условий,
I-оператор начальных условий
Y-выход источника ЗВ, распределённый по параметрам X,
E-вход, распределённый по параметрам X,
Λ-сосредоточенные параметры,
X- пространственные параметры-координаты в земной системе координат.
Если входное воздействие E(X,t) не находится в нашем распоряжении, то
движение этой системы не будет управляемым и возможно лишь пассивное
наблюдение за происходящими процессами. В частности, путём математического
моделирования на ЭВМ можно получить функцию Y(X, Λ, t). С другой стороны, если
входное воздействие включает управление U(Y, X, t), то можно воздействовать на
объект управления для достижения основной цели – минимизации ЗВ, поступающих в
окружающую природную среду.
С учётом этого обстоятельства система (1) примет вид:
L{Y(X, Λ, t)} =E(X, t) + U(Y, X, t), X є D, t є 0,T
B{Y(X, Λ, t)} =G(X, t), X є D, t є 0,T
(2)
I {Y(X, t)} =Y 0 (X, t), X є D, t=0
Математическая модель объекта
управления «вход-выход»
dc
dc
dc
dc
d
dc d
dc d
dc
V
V
V
K
K
K
K1 * Q K 2 * C
dt
d
d
d d
d d
d d
d
C ( L, p)
e * p * e
C ( 0 , p)
C ( L, p) K1
* (1 e
Q( 0 , p) V
*
j
Q ( Lij , p )
K 2 ( L 0 )
V
( p K 2 )( L 0 )
V
K1
(1 e
C j ( j j j , p ) Vij
где
(4)
(5)
)
( p K2 )
Vij
)
V ij V cos(V , Lij ) V (m1 m2 l1 l2 n1 n2 )
(6)
(3)
Задачи построения математических
моделей:
• Математические модели газовоздушной
смеси (аналогично по воде и почве);
• Математические модели газовоздушной
смеси, как объекта управления;
• Математические модели многомерного
объекта управления с перекрестными
связями (промзона, район).
Синтез управлений ЗСУПТ
dY
dt
= AY + BU +X, U=U 0 + U x
(7)
T
I 1 = min { 1 0 (Y PX + U x R x U x ) dt}
2
I 0 = min
{1
2
T
( Y T QY + U 0 R 0 U 0 )dt}
0
(8)
(9)
R x - положительно определённая диагональная матрица весовых коэффициентов
U x (x, t) – управление по возмущению
1
*
K = - KA – A T K + KBR 0 B T K-Q - Уравнение Риккатти
Матрицы Q и R 0 определяются частотными методами.
1
T
U 0 = - R 0 B KY
Ux =
1
T
Rx B
eD
t0
(10)
T ( t )
PXd
(11)
Задачи синтеза управлений:
• Синтез управлений в предположении,
что датчики ЗВ находятся в
экстремальной точке;
• Синтез управлений беспилотным
летательным аппаратом при поиске
экстремума.
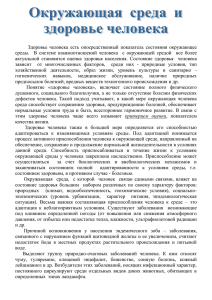
Определение характеристик факела.
zm
z
1/2H
1/3H
y
x
Расчет угла подъема факела
z
y
x
Расчет координат перемещения ЗВ в факеле
z
y
а
x
Поиск максимума концентрации ЗВ в факеле
z
xm, ym, zm
y
x
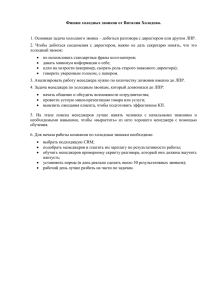
Многомерная система управления
Δ1, Δ2, …, Δi,…, Δn
1, 2,…, i ,…, n
x, y, z
V
– датчики
– предприятия – источники загрязнения
– опорная система координат
– вектор скорости ветра
z
v
i
C
Δi
x
y
C 1
Δ1
Δn
C 2
Δ2
CN
C C C С
1
1
1
вн
1
тр
C C C С
2
2
2
вн
2
тр
……………………………………………………………………....
C C C С
i
i
i
вн
i
тр
……………………………………………………………………....
C C C С
N
N
N
вн
N
тр
Задачи моделирования ЗСУПТ:
• Моделирование в линейном плане;
• Моделирование с учетом
вероятностных характеристик;
• Моделирование распределенной
системы управления;
• Полунатурное моделирование.
Задачи разработки САПР ЗСУПТ:
•
•
•
•
•
•
Построение моделей;
Анализ;
Моделирование;
Расчет;
Конструкторское проектирование;
Обработка результатов испытаний.
Элементы ЗСУПТ
БПЛА с датчиками ЗВ
Запуск воздушного змея
система подвеса
Элементы ЗСУПТ
Сенсоры для измерения SO2, NOx, NH4 и других
низкомолекулярных загрязнений, основанные на нанополупроводниковых компонентах:
- диапазон от 0,5 до 100 ограничение концентрации (ОК);
- чувствительность – меньше чем 0,1 ОК;
- время измерения– не более 5 с.
Поверхность толстопленочного материала, используемых в
сенсорах, на основе нанотехнологий.
Элементы ЗСУПТ
Информационно измерительные системы.
Производство компании «Пантес»
Измерительное
устройство с радио
каналом.
Многоканальное
измерительное
устройство
Преобразователь
первичных сигналов
Элементы ЗСУПТ
Устройства управления.
Производство компании «Пантес»
УУ с каналом телеметрии
УУ с пневматическими устройствами
Элементы ЗСУПТ
Пылегазоуловители (ПГУ)
Воздушный
саморегулируемый
ПГУ
Коммутатор ПГУ
на основе ЭЛВ
4/40
Для усилителя на
плазменнопучковом
СВЧ-приборе
1.
2.
3.
4.
5.
7.
А/
Б
Бункер
Крыльчатки
Вал
Корпус
Фильтрующие элементы
Подводящий коллектор
Камера очищенного/
загрязнённого воздуха
Реактор
Схема ПГУ для комплексной
очистки от газообразных
и твёрдых выбросов ТЭС
Элементы ЗСУПТ
Агрегат компенсации диоксида серы
Сорбенты, имеющие в своей основе Fe-Mn
конкреции (ЖМК).
Время жизни 2-3 года
Регенерация – 300*C
Удельная поверхность железомарганцевых
конкреций и сорбента «Аквамандикс»
Сорбент
Масса
Исходная
навески концентрация
(экв/л)
г
Равновесная
концентрация
(экв/л)
Удельная
поверхность
(м2/г)
ЖМК
5
0,01
2,341·10-3
43,809
Аквамандик
с
5
0,002
1,665·10-3
1,915
Задачи ОКРа:
•Разработка аппаратно-программного
комплекса (АПК);
•Отладка и испытания АПК;
•Разработка датчиков, очистных
агрегатов, контроллеров и другой
аппаратуры.
Оценка экономического эффекта
Оценка ущерба - M i = (ФВВ i - ВДВ i )*Т*0,0864 т/год,
где:
ФВВ i - фактическая величина выброса i
проведения замера;
го
(12)
ЗВ, установленная на момент
ВДВ i - величина допустимого выброса по нормативам;
Т – продолжительность выброса ЗВ с превышением ВДВ i ;
0,0864 – коэффициенты пересчёта размерностей.
го
Размер вреда и убытков причинённых выбросом i ЗВ предприятием источником
определяется по формуле:
Y i = K ин * Н i *М i + З 0 ,
(13)
где:
K ин - коэффициенты индексации за счёт инфляции;
Н i - такса установленная по существующим нормам;
З 0 - затраты на определение вреда от ЗВ включая мониторинг и лабораторный
анализ.
В соответствии с уравнениями (12,13) для ТЭЦ, выбрасывающей 20т.тонн/год, в
пересчёте на SО2, находим:
Y i = 4 млд. руб./год, при таксе 176000 руб./тонна.
Оценки на создание и внедрение ЗСУПТ для такой ТЭЦ по нескольким составляющим
ЗВ, в соответствии с предварительной калькуляцией, составляют:
3 тэц 60 млн. руб./год * 2 года 120млн.руб
Первоочередные задачи инвестиционной
поддержки проекта:
• Инвестиции на разработку и
согласование технического задания на
ОКР;
• Инвестиции на пилотный проект.