Целью доклада является анализ возможностей микроконтроллеров семейств фирмы
реклама

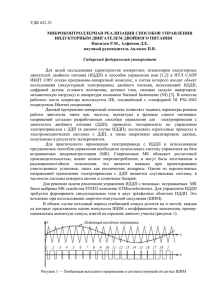
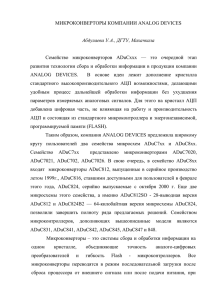
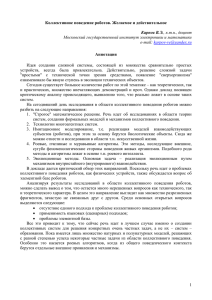
Целью доклада является анализ возможностей микроконтроллеров семейств PIC16, PIC18, dsPic фирмы Microchip при использовании в СУ приводами роботов. Перечень требований к СУ: 1. Формирование управляющего сигнала на привод; 2. Связь с СУ высшего уровня (оператором); 3. Связь с другими СУ; 4. Передача команд управления/состояния; 5. Обработка сигналов с различных датчиков; 6. Реализация требуемых алгоритмов управления; 7. Возможность программирования на языке высокого уровня; 8. Стоимость; Функциональная схема СУ для 2 ДПТ на микроконтроллере PIC16F877A 5В 24В Привод I PIC16F877A Обмен по протоколу RS-232С вх/вых релейных сигналов 14-Bit USART CPU CCP1 ШИМ CCP2 PORTB 8канал. АЦП TMR1 TMR0 24В Мост LMD18200T Привод II Мост LMD18200T Потенциометр Энкодер Рис 1. Недостатки СУ, разработанной на PIC16F877A • сложность реализации алгоритмов управления • отсутствие возможности предварительной обработки сигналов • недостаточно развитая периферия для управления мощными приводами Сравнительные характеристики микроконтроллеров серий 16, 18, dS. PIC16F877A - 2 канала 10-битного ШИМ - 3 цифровых таймера - 8 каналов 10-битного АЦП 50ksps - частота 20 МГц - объем памяти 14 кбайт - отсутствует энкодер - отсутствует CAN интерфейс PIC18F4431 - 8 каналов 14-битного ШИМ - 4 цифровых таймера - 8 каналов 10-битного АЦП 100ksps - частота 40 МГц - объем памяти 16 кбайт - наличие энкодера - наличие CAN интерфейса dsPIC30F6010 - 8 каналов 10-битного ШИМ и 8 каналов 14-битного ШИМ - 5 цифровых таймеров - 16 каналов 10-битного АЦП 500ksps - частота 40 МГц - объем памяти 144 кбайт - наличие энкодера - наличие CAN интерфейса Таблица оценок характеристик микроконтроллеров серий 16, 18, dS. Выводы - Серия PIC16 применима для управления маломощными приводами роботов с несложными алгоритмами управления - Серия PIC18 применима для управления приводами роботов средней и большой мощности с более сложными алгоритмами управления - Серия dsPIC применима для управления мощными приводами роботов со сложными алгоритмами управления и возможностью реализации тактического уровня выполнения задач