Лекция 7, 8, 9 изм
реклама

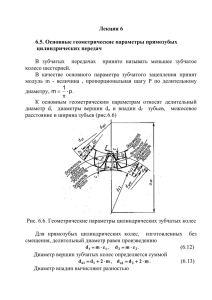
Лекция 7 Профилирование эвольвентных зубьев. 1 • Профилирование эвольвентных зубьев. Условие, которому должны удовлетворять сопряженные профили зубьев, заключается в том, чтобы общая их нормаль в точке касания проходила через полюс зацепления. • Этому условию удовлетворяют различные кривые, которые могут быть использованы для очерчивания профилей зубьев 2 Рассмотрим внешнее эвольвентное зацепление. Развертку окружности мы получим, если по неподвижному кругу I данного радиуса будем перекатывать прямую KK без скольжения. Любая точка этой прямой и прочертит эвольвенту в плоскости круга (рис, 92). Окружность, по которой катится прямая, называете основной окружностью, а прямая — производящей прямой. Важным свойством эвольвенты является то, что производящая прямая является ее нормалью в любой точке. Из определен эвольвенты, кроме того, следует, что длина отрезка ВВ1 равна дуге АВ1 а длина отрезка DD1 — длине дуги AD1 и т. д. Сопряженные эвольвентные профили зубьев видны на рис. 90; их построение сводится к следующему. По числам зубьев z1 и z2 и модулю т определяем диаметр делительных окружностей обоих колес и проводим их так, чтобы они соприкасались в точке Р (рис. 9.4), определяющей положение полюса зацепления данной передачи. Рис. 92. Эвольвента круга. 3 • Выбрав произвольную точку М на прямой NN и покатим эту прямую в произвольном порядке, например, сначала по он окружности II, а затем по окружности I без скольжения, мы увидим, что точка М прочертит на плоскости окружностей две эвольвенты — а1Ма1 и а2Ма2. По свойствам эвольвенты прямая NN является общей нормалью к полученным кривым в точке их касания М и проходит через точку Р — полюс зацепления. Следовательно, эти кривые являются сопряженными и, так как они удовлетворяют основной теореме зацепления, могут быть использованы в качестве очерчивающих кривых профилей зубьев. 4 • То обстоятельство, что общая нормаль NN при любом положении контактной точки М будет проходить через полюс зацепления P, делает ее на участке К1К2 геометрическим местом точек касания сопряженных профилей зубьев на неподвижной плоскости, поэтому она и называется теоретической линией зацепления, т. е. линией зацепления при полном использовании эвольвент. • Угол α, дополнительный к углу β, играет весьма важную роль в геометрии зацепления и технических расчетах и называется углом зацепления. 5 • В настоящее время для нормальных зубчатых передач угол α принят равным 20°. • построение эвольвенты по точкам производится следующим образом. • Отрезок производящей прямой; K1Р делим • на несколько небольших • равных частей, например P—1 = 1-2 =2-3и т. д. Для • удобства рассмотрения • чертежей (рис. 94) . Рис. 93. Зацепление эвольвентных профилей 6 • В настоящее время для нормальных зубчатых передач угол α принят равным 20°. • построение эвольвенты по точкам производится следующим образом. • Отрезок производящей прямой; K1Р делим на несколько небольших равных частей, например P—1 = 1-2 =2-3и т. д. Для удобства рассмотрения чертежей (рис. 94) этот отрезок разделен на четыре части. За тем на основной окружности, начиная от точки K1,откладываем в обе стороны дуги, равные этим частям, т.е. K1 — 3'= К2 — 3; 3' — 2'= 3 — 2 и т. д., а при небольших длинах участков дуги могут быть заменены хордами, что значительно упрощает построение. В точках 1’, 2', 3' ... проводим касательные к основной окружности к откладываем на них; 1) от точки 1’ участок 1’—10 равный Р—1 производящей прямой; от точки 2' — отрезок 2' — 20, равный двум таким участкам; от точки 3' — соответственно отрезок 3' — 30, равный трем участкам и т. д., через точку 4' проходит линия зацепления, совпадающая с производящей прямой, которая уже разделена на четыре части. 7 • Отложенные таким образом на касательных отрезки представляют собой в каждой точке часть длины развертываемой дуги окружности. Очевидно, то же самое мы получили бы, если бы мы сматывали под постоянным натяжением нерастяжимую гибкую Нить, закрепленную одним концом на неподвижном диске такого же радиуса, как и основная окружность, След на плоскости любой точки сматываемой нити и будет эвольвентой. В построении остается лишь соединить точки 10, 20, 30 и т. д. плавной кривой, которая и будет являться разверткой окружности, или эвольвентой, очерчивающей профиль зуба этого колеса. 8 • Построение сопряженного профиля зуба для колеса II про изводится совершенно аналогично, но с разбивкой на равные части участка K2— Р производящей прямой.. Рис. 94. Построение эвольвенты 9 • Для получения профиля противоположной стороны зуба необходимо от точки Р отложить по начальной окружности толщину зуба, которая затем делится пополам, и точка деления соединяется с центром О1 колеса. В результате определяется положение оси симметрии зуба. • По этой оси и профилю одной стороны зуба легко строится профиль его другой стороны, так как правый и левый профили симметричны. Высота головки и ножки зуба определяются при ведением окружностей головок и ножек радиусами соответственно и , которыми и ограничивается участок эвольвенты, профилирующий зуб. Причем, если ножка зуба пересекается основной окружностью, то эвольвентным будет лишь тот участок зуба, который находится между окружностью головок и основной окружностью. Объясняется это тем, что эвольвента никогда не может быть внутри окружности. Остальная часть профиля от основной окружности и до основания зуба часто очерчивается радиальной прямой. 10 Рис. 95. К определению линии и дуги зацепления 11 • Линия и дуга зацепления. Для эвольвентных зацеплений длина рабочей линии зацепления равна отрезку аЬ (рис. 95), отсекаемому окружностями головок обоих колес на нормали NN. Теоретически на этом отрезке лежат точки касания зубьев от момента входа в зацепление и до выхода из него. Нетрудно видеть, что за его пределами профили не могут иметь общих точек, так как последние лежат вне габаритов колес. В соответствии с этим различают и рабочие участки профилей зубьев. Для наглядности они показаны на рис, 95 утолщенными и двойными линиями. Такие участки легко определяются, если проследить за перемещением контактной точки по профилям сопряженной пары зубьев от момента вступления в работу и до выхода из зацепления. 12 • Коэффициент перекрытия. Безразмерная величина ε называется коэффициентом перекрытия (ОСТ 8089), причем для всех видов зацеплений l зац t • Для эвольвентного зацепления, где линия зацепления есть прямая, можно дать формулу для определения коэффициента ε через дополнительные параметры зацепления. 13 Рис.96. К определению коэффициента перекрытия 14 Рис. 98. Пальцевая фреза. Рис. 99. Нарезание зубьев долбяком по методу обкатки. 15 Рис.100. Последовательные положения рейки при нарезании зубьев Рис.101. форма зубьев с подрезанными ножками 16 • Рис. 102 К подрезанию ножек зубьев: а- практическая линия зацепления аЬ за пределами теоретической; б — предельное положение зацепления, при котором подрезание не наблюдается. 17 Лекция 8 Цилиндрические колеса внешнего зацепления с косыми зубьями и шевронные колеса 18 • Рис. 103. Ступенчатый зуб цилиндрического колеса. 19 Рис. 104. Косой зуб цилиндрического колеса20 Рис. 105. К образованию боковой поверхности зуба. 21 Измеренное по начальному цилиндру расстояние между образующими в одну сторону профилями смежных зубьев в сечении, нормальным к полюсной линии, называется нормальным шагом —.В соответствии с этим нормальный модуль зацепления будет mn tn 22 • Расстояние между точками сходно расположенных профилей смежных зубьев, измеренное по дуге начальной окружности (в сечении, перпендикулярном к оси колеса), называется торцовым шагом — t s. Поэтому торцовый модуль равен ms ts 23 Рис. 107. Развертка косозубого зацепления в плоскость. 24 Рис. 108. К определению соотношения между углами n и s 25 Рис. 109. Шевронное колесо. 26 Лекция 9 Механизмы, составленные из зубчатых колес 27 • Зубчатые механизмы с колесами, оси которых неподвижны. Необходимость применения сложных передач, состоящих из нескольких зубчатых пар, возникает чаще всего, когда передаточное число выходит за пределы, допускаемые для одной пары зубчатых колес. В связи с этим, естественно возникает вопрос об этих пределах. • Как мы уже видели, передаточное число определяется, в частности, отношением чисел зубьев передачи • z i 2 z1 28 • Рис. 110. Схема рядового соединения зубчатых колес. 29 • Поэтому когда передаточное число больше установленного предела и, следовательно, его нельзя осуществить при помощи одной пары колес, прибегают к многоступенчатой передаче. Такая передача называется рядовым соединением, или просто рядом. Ее основу составляет последовательный ряд зубчатых колес. Все промежуточные валы содержат не по одному, а по два зубчатых колеса, находящихся в зацеплении с колесами смежных валов, в связи с чем любой из них является ведомым по отношению к предыдущему валу и ведущим — по отношению к последующему 30 • Механизм, состоящий из зубчатых колес и предназначенный для уменьшения числа оборотов ведомого вала по сравнению с оборотами ведущего, называется редуктором. Если такой механизм увеличивает число оборотов ведомого вала, его называют мультипликатором. 31 • Зубчато-рычажные механизмы. До сих пор мы рассматривали зубчатые механизмы с неподвижными осями колес. К ним применимы выведенные выше формулы для определения частных и общих передаточных чисел. • В современной практике машиностроения широко используются зубчато- рычажные механизмы со сложным вращательным движением колес. • Группа или одно колесо такого механизма, называемого эпициклическим, вращаются не только вокруг геометрической оси, как в обычной передаче, но вместе с нею и вокруг неподвижной оси зацепляющегося с ними центрального зубчатого колеса. 32 • Рис. 112. Схема дифференциального механизма. 33 • Эпициклическая передача может быть составлена из цилиндрических или конических зубчатых колес или из тех и других вместе. Схема одного из таких механизмов показана на рис. 112. Звено а входит во вращательную кинематическую пару со стойкой d и вместе с тем образует такую же пару со звеном Н, называемым водилом. Водило Н, кроме того, входит во вращательную пару с звеном b, а звено с составляет такую пару со стойкой d. Звенья a,b и c попарно сцеплены между собой зубьями zа, zb и zb, zc,. Обозначим через n — число подвижных звеньев, р2 — число низших и р1, — высших кинематических пар. Число степеней свободы находим по формуле • ω = 3n —2р2 — р1=3·4 — 2·4 — 2=2. 34 • Следовательно, для определенности движения рассматриваемой кинематической цепи относительно стойки необходимо задать двум ее звеньям независимые между собой движения. Механизм с двумя степенями свободы называется дифференциальным. Ведущими могут быть звенья а и Н, снабженные зубчатыми колесами za и zн для передачи вращательного движения данному механизму от звеньев, не входящих в его состав. • Ведомым в этом случае будет звено с. Если принять в качестве ведущих звеньев а и с, то ведомым будет, водило Н и, наконец, если роль ведущих будет принадлежать звеньям Н и с, то ведомым окажется звено а. • Во всех трех случаях сблокированные колеса zb и z‘b (звено b) вращаются не только вокруг своей общей оси, но и сбегают зубчатые колеса zа и zс. 35 • Обегающие колеса zb и z‘b называются планетными, или сателлитами, а обегаемые zа и zс — центральными. • В случае прикрепления к стойке одного из подвижных звеньев например, звена а, Н или с, рассматриваемый механизм теряет одну степень свободы. При этом, если будет закреплено звено а или с, он переходит в свою разновидность — планетарный механизм с одной степенью свободы. В случае присоединения к стойке звена Н (водило) дифференциальный механизм превращается в обыкновенный зубчатый ряд с неподвижными относительно стойки осями вращения колес. 36 • Дифференциальные и планетарные (эпициклические) механизм обладают рядом достоинств. К ним следует отнести возможное осуществления значительных передаточных чисел при малом количестве звеньев, в результате чего уменьшаются габариты и вес передачи; возможность сообщения ведомому звену такого вращательного движения, которое является суммой или разностью движений ведущих звеньев. • Недостатками этих механизмов являются относительная сложность конструкции, требующая повышенной точности обработки деталей и сборки; сравнительно большая потеря энергии на трение в кинематических парах, что серьезно препятствует внедрению некоторых типов этих механизмов, 37 Рис. 113. Схема планетарного механизма. 38