Оптимизация Производительности Схем Физическое Проектирование СБИС: Авторы книги:
реклама

© KLMH
Физическое Проектирование СБИС:
от Разбиения Графов до Оптимизации Производительности Схем
Глава 8 – Оптимизация Производительности Схем
Авторы книги:
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
1
Lienig
Andrew B. Kahng, Jens Lienig, Igor L. Markov, Jin Hu
© KLMH
Глава 8 – Оптимизация Производительности Схем
8.1
Введение
8.2
Временной анализ и требования производительности схем
8.2.1 Статический временной анализ (SТA)
8.2.2 Бюджеты задержки и алгоритм распределения временного запаса (ZSA)
8.3 Размещение с временной оптимизацией
8.3.1 Методы с упором на сети
8.3.2 Вложение STA в линейные программы для размещения
8.4 Трассировка с временной оптимизацией
8.4.1 Алгоритм ограниченного радиуса и стоимости
8.4.2 Компромисс Прима-Дейкстры
8.4.3 Минимизация задержки от источника до стока
8.5 Физический синтез схем
8.5.1 Масштабирование вентилей
8.5.2 Буферизация
8.5.3 Перестройка сетей
8.6 Маршрут проектирования с оптимизацией производительности схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
2
Lienig
8.7 Заключение
Оптимизация производительности схем
© KLMH
8
Спецификация систем
Разбиение
ENTITY test is
port a: in bit;
end ENTITY test;
Архитектурное
проектирование
Функциональное
проектирование
Проектирование схем
Физическое
проектирование
Планированние
кристалла
Размещение
Синтез синхросигналов
Физическая верификация
DRC
LVS
Производство
Упаковка и тестирование
Коммерческий продукт
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
3
Lienig
Временная оптимизация
© 2011 Springer Verlag
ERC
Трассировка сигналов
Введение
© KLMH
8.1
Раскладка интегральных схем (ИС) должна выполнять геометрические,
ограничения, электрические ограничения, ограничения по мощности и
тепловым характеристикам а также временные ограничения
ограничения установки сигнала (соотв. длинным путям на схеме)
ограничения удержания сигнала (соотв. коротким путям на схеме)
Проектировщики должны завершить
оптимизацию временных характеристик
выполнить временные ограничения
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
4
Lienig
процесс сочитает индивидуальнуе оптимизации обсуждаемые в предыдущих
главах (размещение, трассировку, и т.д.) со специализированными
методами улучшения производительности схемы
Введение
© KLMH
8.1
Этапы оптимизации производительности схем
освещённые в этой лекции:
Размещение с временной оптимизацией (Sec. 8.3) уменьшает задержки
сигналов при определении местоположения элементов схемы
Трассировка с временной оптимизацией (Sec. 8.4) уменьшает задержки
сигналов при выборе тополий сетей и прокладке маршрутов
Физический синтез (Sec. 8.5) уменьшает задержки перестраивая схему
Масштабирование транзисторов и вентилей: изменение соотношения длины
и ширины транзисторов чтобы увеличить или уменьшить задержку или
ведущую силу вентиля
Вставка буферов в сети чтобы уменьшить задержки сигнала
Перестройка сетей вдоль критических путей
Маршрут проектирования с оптимизацией производительности схемы
(Sec. 8.6)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
5
Lienig
Введение
© KLMH
8.1
Оптимизация производительности схем требует точной и быстрой оценки
задержек распостранения сигналов в схеме
Для оценки временных характеристик схемы, задержки распостранения
сигналов через элементы схемы просчитываются в разных точках схемы.
Учитываются два типа временных ограничений:
Ограничения установки сигнала (огр. длинных путей) для элементов памяти
(триггеров и защёлок) указывают как долго входной сигнал должен
оставаться неизменным перед фронтом синхросигнала
Ограничения удержания сигнала (огр. коротких путей) для элементов памяти
указывают как долго сигнал должен оставаться неизменным после фронта
синхросигнала
t такта t ком б. задержки t установки t перекоса
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
6
Lienig
t ком б. задержки t удержания t перекоса
Введение
Оптимизация временных характеристик выполняет временные
ограничения, меняя раскладку и перестраивая схему
Жаргон: “the design has closed timing” - «проект закрыт по времени»
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
7
Lienig
© KLMH
8.1
Временной анализ и временные ограничения
© KLMH
8.2
8.1
Введение
8.2
Временной анализ и требования производительности схем
8.2.1 Статический временной анализ (SТA)
8.2.2 Бюджеты задержки и алгоритм распределения временного запаса (ZSA)
8.3 Размещение с временной оптимизацией
8.3.1 Методы с упором на сети
8.3.2 Вложение STA в линейные программы для размещения
8.4 Трассировка с временной оптимизацией
8.4.1 Алгоритм ограниченного радиуса и стоимости
8.4.2 Компромисс Прима-Дейкстры
8.4.3 Минимизация задержки от источника до стока
8.5 Физический синтез схем
8.5.1 Масштабирование вентилей
8.5.2 Буферизация
8.5.3 Перестройка сетей
8.6 Маршрут проектирования с оптимизацией производительности схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
8
Lienig
8.7 Заключение
Временной анализ и требования производительности схемы
© KLMH
8.2
Последовательная схема, “развёрнутая” во времени
Комбинационная
схема
(Копия 1)
Комбинационная
схема
(Копия 2)
FF
FF
Комбинационная
схема
(Копия 3)
FF
Комбинационные схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
9
Lienig
Ячейки памяти
© 2011 Springer Verlag
Синхросигнал
Временной анализ и требования производительности схемы
© KLMH
8.2
Главные компоненты задержки в последовательных схемах
Задержки в вентилях связанные с переменой сигнала
Задержки в проводах связанные с распостранением сигнала в длинных
проводах
Перекос синхросигнала определияет разницу во времени активации
элементов памяти
Чтобы быстро оценить производительность последовательной схемы
используется статический временной анализ (STA)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
10
Lienig
пренебрегаем перекосом синхросигнала (поправка на поздних стадиях)
Статический временной анализ
© KLMH
8.2.1
Рассмотрим худший случай, в котором каждый вентиль переключается
Представим комбинационную схему направленным ацикличным графом
(DAG)
Каждое ребро и вершина несут на себе вес - задержка проводов и вентилей
Для каждой вершины, вычислим запас = RAT – AAT
RAT это трeбуемое время прибытия, т.е. самое позднее время переключения
допустимое требованиями производительности схемы
AAT это фактическое время прибытия
По договорённости, AAT изначально определён на входных контактах схемы и
прощитывается на выходе каждого элемента схемы
Отрицательный запас в любой точке схемы означает что схема
не выполняет требования производительности
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
11
Lienig
Положительный запас на всех выходах озанчает что схема выполняет
требования
8.2.1
Статический временной анализ
(0.15)
a
y (2)
(0.2)
w (2)
© KLMH
Комбинационная схема представленная графом (DAG)
(0.2)
f
(0.1)
(0.1) x (1)
(0.3)
z (2)
(0.1)
a (0)
(0)
(0)
y (2)
(0.15)
(0.1)
b (0) (0.1)
(0.2)
w (2) (0.2)
x (1)
(0.3)
(0.6)
c (0)
(0.1)
VLSI Physical Design: From Graph Partitioning to Timing Closure
f (0)
(0.25)
z (2)
Chapter 8: Timing Closure
12
Lienig
c
s
(0.25)
© 2011 Springer Verlag
b
8.2.1
Статический временной анализ
© KLMH
Вычислим AATs в каждой вершине:
AAT (v) max AAT (u ) t (u, v)
uFI ( v )
где FI(v) это множество вершин на входе вентиля v (fanin),
а t(u,v) это задержка мехду u и v
(значения AAT на входных контактах заданы сначала)
y (2)
(0.15)
A0
A 3.2
s
(0)
A0
(0.1)
b (0) (0.1)
A0
w (2) (0.2)
x (1)
A 1.1
A 5.65
(0.3)
(0.6)
c (0)
(0.2)
(0.1)
A 0.6
VLSI Physical Design: From Graph Partitioning to Timing Closure
f (0)
A 5.85
(0.25)
z (2)
A 3.4
Chapter 8: Timing Closure
13
Lienig
(0)
© 2011 Springer Verlag
a (0)
8.2.1
Статический временной анализ
RAT (v) min
uFO( v )
© KLMH
Вычислим RATs в каждой вершине:
RAT (u) t (u, v)
где FO(v) это множество вершин на выходе вентиля v (fanout),
а t(u,v) это задержка между u и v
(значения RAT на выходных контактах заданы сначала)
y (2)
(0.15)
R 0.95
R 3.1
s
(0)
R -0.35
(0.1)
b (0) (0.1)
R -0.35
w (2) (0.2)
x (1)
R 0.75
R 5.3
(0.3)
(0.6)
c (0)
(0.2)
(0.1)
R 0.95
VLSI Physical Design: From Graph Partitioning to Timing Closure
f (0)
R 5.5
(0.25)
z (2)
R 3.05
Chapter 8: Timing Closure
14
Lienig
(0)
© 2011 Springer Verlag
a (0)
8.2.1
Статический временной анализ
© KLMH
Вычислим запас (slack) в каждой вершине:
slack (v) RAT (v) AAT (v)
A0
R -0.35
S -0.35
(0)
b (0) (0.1)
(0.6)
A0
R -0.35
S -0.35
c (0)
A 3.2
(0.1) R 3.1 (0.2)
S -0.1
w (2) (0.2)
x (1)
A 1.1
R 0.75 (0.3)
S -0.35
(0.1)
A 0.6
R 0.95
S 0.35
VLSI Physical Design: From Graph Partitioning to Timing Closure
A 5.65
(0.25) R 5.3
S -0.35
f (0)
A 5.85
R 5.5
S -0.35
z (2)
A 3.4
R 3.05
S -0.35
Chapter 8: Timing Closure
15
Lienig
s
(0)
A0
R 0.95
S 0.95
y (2)
(0.15)
© 2011 Springer Verlag
a (0)
Распределениe временного запаса по бюджетам задержки
© KLMH
8.2.2
Назначим временной бюджет для каждой сети
Задержки вентилей и проводов должны быть оптимизированы при раскладке
Задержки проводов зависят от длин проводов
Длины проводов неизвестны до размещения и трассировки
Расчёт бюджетов с алгоритмом распределения временного запаса
Рассмотрим вентили vi
Рассмотрим сети ei
Задержки вентилей DELAY(v) и сетей DELAY(e)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
16
Lienig
Бюджет вентиля TB(v) включает DELAY(v) + DELAY(e)
Распределениe временного запаса по бюджетам задержки
© KLMH
8.2.2
Исходные данные: временной граф G(V,E)
Результат: временной бюджет TB для каждого v V
1. do
2. (AAT,RAT,slack) = STA(G)
3. foreach (vi V)
4.
TB[vi] = DELAY(vi) + DELAY(ei)
5. slackmin = ∞
6. foreach (v V)
7.
if ((slack[v] < slackmin) and (slack[v] > 0))
8.
slackmin = slack[v]
9.
vmin = v
10. if (slackmin ≠ ∞)
11.
path = vmin
12.
ADD_TO_FRONT(path,BACKWARD_PATH(vmin,G))
13.
ADD_TO_BACK(path,FORWARD_PATH(vmin,G))
14.
s = slackmin / |path|
15.
for (i = 1 to |path|)
16.
node = path[i]
// распределить поравну
17.
TB[node] = TB[node] + s
// запас вдоль пути path
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
17
Lienig
18. while (slackmin ≠ ∞)
Распределениe временного запаса по бюджетам задержки
© KLMH
8.2.2
Forward Path Search (FORWARD_PATH(vmin,G))
Исходные данные: вершина vmin с минимальным положительным запасом slackmin; временной граф G
Результат: максимальный путь path вниз по течению от vmin такой что вершины v V не влияют
на запас на пути path
1. path = vmin
2. do
3. flag = false
4. node = LAST_ELEMENT(path)
5. foreach (fanout node fo of node)
6.
if ((RAT[fo] == RAT[node] + TB[fo]) and (AAT[fo] == AAT[node] + TB[fo]))
7.
ADD_TO_BACK(path,fo)
8.
flag = true
9.
break
10. while (flag == true)
VLSI Physical Design: From Graph Partitioning to Timing Closure
// удалить vmin
Chapter 8: Timing Closure
18
Lienig
11. REMOVE_FIRST_ELEMENT(path)
Распределениe временного запаса по бюджетам задержки
© KLMH
8.2.2
Backward Path Search (BACKWARD_PATH(vmin,G))
Исходные данные: вершина vmin с минимальным положительным запасом slackmin; временной граф G
Результат: максимальный путь path вверх по течению от vmin такой что вершины v V не влияют
на запас на пути path
1.
path = vmin
2.
do
3.
flag = false
4.
node = FIRST_ELEMENT(path)
5.
foreach (fanin node fi of node)
6.
if ((RAT[fi] == RAT[node] – TB[fi]) and (AAT[fi] == AAT[node] – TB[fi]))
7.
ADD_TO_FRONT(path,fi)
8.
flag = true
9.
break
10. while (flag == true)
VLSI Physical Design: From Graph Partitioning to Timing Closure
// удалить vmin
Chapter 8: Timing Closure
19
Lienig
11. REMOVE_LAST_ELEMENT(path)
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
© KLMH
8.2.2
O1: <13,4,17>
I1
I2
I3
<1,4,5> [0]
O2: <6,8,14>
<3,4,7> [0]
2
<0,5,5> [0]
4
<7,4,11> [0]
<13,4,17> [0]
O1
6
<1,6,7> [0]
<6,8,14> [0]
<3,5,8> [0]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<6,5,11> [0]
0
Chapter 8: Timing Closure
O2
20
Lienig
3
I4
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
Найдём путь с минимальным ненулевым запасом
© KLMH
8.2.2
O1: <13,4,17>
I1
I2
I3
<1,4,5> [0]
O2: <6,8,14>
<3,4,7> [0]
2
<0,5,5> [0]
4
<7,4,11> [0]
<13,4,17> [0]
O1
6
<1,6,7> [0]
<6,8,14> [0]
<3,5,8> [0]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<6,5,11> [0]
0
Chapter 8: Timing Closure
O2
21
Lienig
3
I4
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
Найдём путь с минимальным ненулевым запасом
Распределим запасы и обновим бюджеты
© KLMH
8.2.2
O1: <17,0,17>
I1
I2
I3
<1,0,1> [1]
O2: <6,8,14>
<3,0,4> [1]
2
<0,2,2> [0]
4
<9,0,9> [1]
<16,0,16> [1]
O1
6
<1,4,5> [0]
<6,8,14> [0]
<3,4,7> [0]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<6,4,10> [0]
0
Chapter 8: Timing Closure
O2
22
Lienig
3
I4
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
Найдём путь с минимальным ненулевым запасом
Распределим запасы и обновим бюджеты
© KLMH
8.2.2
O1: <17,0,17>
I1
I2
I3
<1,0,1> [1]
O2: <6,8,14>
<4,0,4> [1]
2
<0,0,0> [2]
4
<9,0,9> [1]
<16,0,16> [1]
O1
6
<1,4,5> [0]
<6,8,14> [0]
<3,4,7> [0]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<6,4,10> [0]
0
Chapter 8: Timing Closure
O2
23
Lienig
3
I4
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
Найдём путь с минимальным ненулевым запасом
Распределим запасы и обновим бюджеты
© KLMH
8.2.2
O1: <16,0,16>
I1
I2
I3
<1,0,1> [1]
O2: <6,8,14>
<4,0,4> [1]
2
<0,0,0> [2]
4
<9,0,9> [1]
<16,0,16> [1]
O1
6
<1,2,3> [2]
<6,8,14> [0]
<3,2,5> [0]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<6,2,8> [2]
0
Chapter 8: Timing Closure
O2
24
Lienig
3
I4
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
Найдём путь с минимальным ненулевым запасом
Распределим запасы и обновим бюджеты
© KLMH
8.2.2
O1: <17,0,17>
I1
I2
I3
<1,0,1> [1]
O2: <10,4,14>
<4,0,4> [1]
2
<0,0,0> [2]
4
<9,0,9> [1]
<16,0,16> [1]
O1
6
<1,0,1> [3]
<10,4,14> [0]
<3,1,4> [0]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<7,0,7> [3]
0
Chapter 8: Timing Closure
O2
25
Lienig
3
I4
Распределениe временного запаса по бюджетам задержки
Пример: алгоритм распределения временного запаса
Формат: <AAT, запас, RAT>, [бюджет]
Найдём путь с минимальным ненулевым запасом
Распределим запасы и обновим бюджеты
© KLMH
8.2.2
O1: <17,0,17>
I1
I2
I3
<1,0,1> [1]
O2: <10,4,14>
<4,0,4> [1]
2
<0,0,0> [2]
4
<9,0,9> [1]
<16,0,16> [1]
O1
6
<1,0,1> [3]
<10,4,14> [4]
<3,0,3> [1]
VLSI Physical Design: From Graph Partitioning to Timing Closure
<7,0,7> [3]
0
Chapter 8: Timing Closure
O2
26
Lienig
3
I4
Размещение с временной оптимизацией
© KLMH
8.3
8.1
Введение
8.2
Временной анализ и требования производительности схем
8.2.1 Статический временной анализ (SТA)
8.2.2 Бюджеты задержки и алгоритм распределения временного запаса (ZSA)
8.3 Размещение с временной оптимизацией
8.3.1 Методы с упором на сети
8.3.2 Вложение STA в линейные программы для размещения
8.4 Трассировка с временной оптимизацией
8.4.1 Алгоритм ограниченного радиуса и стоимости
8.4.2 Компромисс Прима-Дейкстры
8.4.3 Минимизация задержки от источника до стока
8.5 Физический синтез схем
8.5.1 Масштабирование вентилей
8.5.2 Буферизация
8.5.3 Перестройка сетей
8.6 Маршрут проектирования с оптимизацией производительности схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
27
Lienig
8.7 Заключение
Размещение с временной оптимизацией
© KLMH
8.3
Размещение с временной оптимизацией оптимизирует
задержку схемы чтобы выполнить требования производительности
Рассмотрим множество T всех временных точек схемы (контактов)
Выполнение требований производительности можно оценить
с помощью наименьшего отрицательного запаса (WNS)
WNS minslack(τ)
τ
Или суммарного отрицательного запаса (TNS)
TNS
slack(τ)
τ, slack( τ ) 0
Типы оптимизации: с упором на сети, с упором на пути, интегрированные
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
28
Lienig
Временная оптимизация с упором на сети
© KLMH
8.3.1
Добаляем вес к каждой сети – размещение оптимизирует
взвешенную длину проводов
Статические веса сетей: вычислены перед размещением (не изменяются)
Дискретные веса:
ω if slack 0
w 1
ω2 if slack 0
где ω1 > 0, ω2 > 0, и ω2 > ω1
α
Непрерывные веса:
slack
w 1
где t это задержка длиннейшего пути
t α – параметр критичности
С использованием чуствительности TNS и запаса задержки к данной сети
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
29
Lienig
w wo α( slacktarget slack ) s wSLACK β s wTNS
Временная оптимизация с упором на сети
© KLMH
8.3.1
Динамические веса сетей: обновляются в течении размещения
Оцениваем запас на каждой
итерации:
slackk slackk 1 sLDELAY L
где ΔL это изменение длины
1
2 υ k 1 1 если среди 3% самых критичных сетей
Обновим параметр υ k
1
срочности сети:
υ k 1
иначе
2
Обновим вес сети:
Варианты: веса обновляются через j итераций,
с использованием других критериев и формул
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
30
Lienig
wk wk 1 1 υ k
Вложение STA в линейные программы для размещения
© KLMH
8.3.2
Выведем линейные органичения для размещения с временной оптимизацией
Геометрические ограничения определяют координаты ячеек
Временные ограничения контролируют запас
Оптимизация функций
Увеличить наименьший отрицательный запас (WNS)
Увеличить суммарный отрицательный запас (TNS)
Увеличить линейную комбинацию WNS и TNS
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
31
Lienig
Вложение STA в линейные программы для размещения
© KLMH
8.3.2
Переменные для геометрических ограничений:
xv и yv задают центр ячейки v V
Ve множество ячеек присоединённых к сети e E
left(e), right(e), bottom(e), и top(e) отвечают координатам
левой, правой, нижней и верхней границ объемлющего прямоугольника
для e
VLSI Physical Design: From Graph Partitioning to Timing Closure
v с e
Chapter 8: Timing Closure
32
Lienig
δx(v,e) и δy(v,e) задают смещение контактов
в расчёте от xv и yv
Вложение STA в линейные программы для размещения
© KLMH
8.3.2
Для всех v Ve:
left (e) xv δ x (v, e)
right(e) xv δ x (v, e)
bottom(e) yv δ y (v, e)
top(e) yv δ y (v, e)
Определим полупериметровую длину проводов (HPWL) для e:
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
33
Lienig
L(e) right (e) left (e) top(e) bottom(e)
Вложение STA в линейные программы для размещения
© KLMH
8.3.2
Для временных ограничений, рассмотрим
tGATE(vi,vo): задержка вентиля v от входного контакта vi до выходного контакта vo
tNET(e,uo,vi): задержка сети e от выходного контакта uo вентиля u до входного
контакта vi вентиля v
AAT(vj): время фактического прибытия сигнала на контакт j вентиля v
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
34
Lienig
Вложение STA в линейные программы для размещения
© KLMH
8.3.2
Для всех входных контактов vi вентиля (ячейки) v :
AAT (vi ) AAT (uo ) t NET (uo , vi )
Для всех выходных контактов vo вентиля (ячейки) v :
AAT (vo ) AAT (vi ) tGATE (vi , vo )
Для всех контактов τp в элементе памяти τ:
slack(τ p ) RAT(τ p ) AAT(τ p )
Нужно убедиться что все значения slack(τp) 0
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
35
Lienig
Вложение STA в линейные программы для размещения
© KLMH
8.3.2
Оптимизация суммарного отрицательного запаса:
max :
slack(τ
p)
τ p Pins( τ ), τ
Оптимизация наименьшего отрицательного запаса :
max : WNS
Оптимизация линейной комбинации нескольких параметров:
min :
L(e) α WNS
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
36
Lienig
eE
Трассировка с временной оптимизацией
© KLMH
8.4
8.1
Введение
8.2
Временной анализ и требования производительности схем
8.2.1 Статический временной анализ (SТA)
8.2.2 Бюджеты задержки и алгоритм распределения временного запаса (ZSA)
8.3 Размещение с временной оптимизацией
8.3.1 Методы с упором на сети
8.3.2 Вложение STA в линейные программы для размещения
8.4 Трассировка с временной оптимизацией
8.4.1 Алгоритм ограниченного радиуса и стоимости
8.4.2 Компромисс Прима-Дейкстры
8.4.3 Минимизация задержки от источника до стока
8.5 Физический синтез схем
8.5.1 Масштабирование вентилей
8.5.2 Буферизация
8.5.3 Перестройка сетей
8.6 Маршрут проектирования с оптимизацией производительности схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
37
Lienig
8.7 Заключение
Трассировка с временной оптимизацией
© KLMH
8.4
Трассировка с временной оптимизацией должна минимизировать:
Наибольшую задержку до стока: задержу из источника до любого стока сети
Суммарную длину проводов: с учётом конкретных маршрутов (трасс)
Для сигнальной сети net, рассмотрим
источник s0
стоки sinks = {s1, … ,sn}
соответвтующий граф с весами G = (V,E) где
V = {v0,v1, … ,vn} представлюет источник и стоки (контакты) сети net, и
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
38
Lienig
вес ребра e(vi,vj) E отвечает длине маршрута от vi до vj
Трассировка с временной оптимизацией
© KLMH
8.4
Для любого остовного дерева T в G, рассмотрим:
radius(T) : max длина пути из источника к стоку в T
cost(T) : суммарный вес рёбер T
Компромисс между “неглубокими” и “короткими” деревьями
У “неглубоких” деревьев малый радиус
древо кратчайших путей
строится алгоритмом Дейкстры
У “коротких” деревьев малый суммарный вес рёбер
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
39
Lienig
минимальное остовное дерево (MST)
строится алгоритмом Прима
Трассировка с временной оптимизацией
© KLMH
8.4
2
3
2
2
3
3
6
6
7
5
s0
s0
radius(T) = 8
cost(T) = 20
radius(T) = 13
cost(T) = 13
radius(T) = 11
cost(T) = 16
“Неглубокое дерево”
“Лёгкое дерево”
Компромисс между
длиной и глубиной
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
40
Lienig
s0
5
© 2011 Springer Verlag
5
Алгоритм ограниченного радиуса и стоимости
© KLMH
8.4.1
Компромисс между радиусом и стоимостью находится
при помощи наложения верхних границ на оба параметра
В контексте алгоритм ограниченного радиуса и стоимости рассмотрим:
Дерево кратчайших путей TS
Минимальное остовное дерево TM
Дерево TBRBC построенное для параметра ε>0 выполняет:
radius (TBRBC ) (1 ε) radius (TS )
and
При ε = 0, TBRBC достигает минимального радуса
Когда ε = ∞, TBRBC достигает минимальной стоимости
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
41
Lienig
2
cost (TBRBC ) 1 cost (TM )
ε
Компромисс Прима-Дейкстры
© KLMH
8.4.2
Компроисс Прима-Дейкстры базируется на алгоритмах Прима и Дейкстры
Из множества стоков S, итеративно выбираем сток s
с использованием одной из функций
для алгоритма Прима:
для алгоритма Дейкстры:
cost(si , s j )
cost ( s , s ) cost ( s , s )
0 i
i j
для компромисса Прима-Дейкстры: γ cost ( s0 , si ) cost ( si , s j )
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
42
Lienig
с константой γ между 0 и 1: линейная комбинация
двух «чистых» алгоритмов
Компромисс Прима-Дейкстры
© KLMH
8.4.2
4
4
7
11
8
8
7
9
s0
radius(T) = 19
cost(T) = 35
radius(T) = 15
cost(T) = 39
γ = 0.25
γ = 0.75
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
43
Lienig
s0
© 2011 Springer Verlag
9
7
Минимизация задержки от источника до стоков
© KLMH
8.4.3
Итеративно строим дерево добавляя стоки,
с оптимизацией срочных стоков
Задача о маршрутном дереве со срочными стоками (CSRT)
минимизирует
n
α(i) t (s , s )
0
i
i 1
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
44
Lienig
где α(i) - это оценки срочности стоков si,
а t(s0,si) - это задержка от s0 до si
Минимизация задержки от источника до стоков
© KLMH
8.4.3
В задаче о дереве Штейнера с одним срочным стоком, нужно построить
дерево Штейнера минимальной длины которое соединяет все стоки кроме
самого срочного sc
Присоединяем самый срочный сток одим из способов
H0: прямой провод из sc до s0
H1: кратчайший провод присоединяющий sc к T, при условии что
полученный путь от s0 до sc имеет наименьшую возможную длину
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
45
Lienig
HBest: опробовать кратчайшие связки от sc до рёбер T и от sc до s0.
Выполнить временной анализ на каждом из полученных деревьев
и выбрать дерево с наименьшей задержкой до sc
Физический синтез схем
© KLMH
8.5
8.1
Введение
8.2
Временной анализ и требования производительности схем
8.2.1 Статический временной анализ (SТA)
8.2.2 Бюджеты задержки и алгоритм распределения временного запаса (ZSA)
8.3 Размещение с временной оптимизацией
8.3.1 Методы с упором на сети
8.3.2 Вложение STA в линейные программы для размещения
8.4 Трассировка с временной оптимизацией
8.4.1 Алгоритм ограниченного радиуса и стоимости
8.4.2 Компромисс Прима-Дейкстры
8.4.3 Минимизация задержки от источника до стока
8.5 Физический синтез схем
8.5.1 Масштабирование вентилей
8.5.2 Буферизация
8.5.3 Перестройка сетей
8.6 Маршрут проектирования с оптимизацией производительности схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
46
Lienig
8.7 Заключение
Физический синтез схем
© KLMH
8.5
Физический синтез это набор временных оптимизаций
для увеличения отрицательного запаса
Примеры: расчёт временных бюджетов и исполнение временных правок
Этапы бюджетирования:
расчитать целевые задержки для сетей и/или вдоль путей
зачастую перед размещением и трассировкой (где бюджеты используются)
также может использоваться при временных правках
Временные правки:
Масштабирование вентилей
Вставка буферов
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
47
Lienig
Перестройка сетей
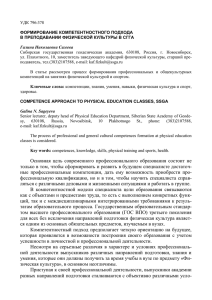
Масштабирование вентилей
© KLMH
8.5.1
Рассмотрим вентиль v с тремя возможными размерами A, B, C:
size (vC ) size (vB ) size (vA )
У больших вентилей меньше сопротивление выходного контакта
При больших нагрузочных ёмкостях
t (vC ) t (vB ) t (v A )
У меньших вентилей больше сопротивление выходного контакта
При меньших нагрузочных ёмкостях :
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
48
Lienig
t (vC ) t (vB ) t (v A )
Масштабирование вентилей
© KLMH
8.5.1
Рассмотрим вентиль v с тремя возможными размерами A, B, C :
size (vC ) size (vB ) size (vA )
40
35
Задержка (ps)
35
30
25
20
15
23
18
24
21
25
24
30
27
30
26
27
40
33
28
A
B
C
20
15
0.5
1.0
1.5
2.0
2.5
Нагрузочная ёмкость (fF)
VLSI Physical Design: From Graph Partitioning to Timing Closure
3.0
Chapter 8: Timing Closure
49
Lienig
5
© 2011 Springer Verlag
10
Масштабирование вентилей
© KLMH
8.5.1
a
b
vA
v
d
C(d) = 1.5
e
C(e) = 1.0
f
C(f) = 0.5
t(vA) = 40
VLSI Physical Design: From Graph Partitioning to Timing Closure
C(d) = 1.5
e
C(e) = 1.0
f
C(f) = 0.5
a
b
vC
d
C(d) = 1.5
e
C(e) = 1.0
f
C(f) = 0.5
t(vC) = 28
Chapter 8: Timing Closure
50
Lienig
a
b
d
Буферизация
© KLMH
8.5.2
Буфер: два инвертера соединённых последовательно
Вставив буфер, можно изменить задержку схемы
изменить времена переключения
экранировать ёмкостную нагрузку
ускорить схему или вставить элемент задержки
Недостатки:
Увеличивается площадь схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
51
Lienig
Увеличивается мощность энергопотребления
Буферизация
© KLMH
8.5.2
vB
f C(f) = 1
g C(g) = 1
C(vB) = 5 fF
h C(h) = 1
t(vB) = 45 ps
d C(d) = 1
e C(e) = 1
a
b
vB
y
C(vB) = 3 fF
f C(f) = 1
g C(g) = 1
h C(h) = 1
t(vB) = 33 ps
C(y) = 3 fF
t(y) = t(vB) + t(y) = 66 ps
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
52
Lienig
a
b
d C(d) = 1
e C(e) = 1
Перестройка схем
© KLMH
8.5.3
Перестройка схем меняет вентили схемы,
но сохраняет функцию схемы без изменений
Примеры преобразований схем
клонирование: дублирование вентилей
переделка входного или выходного дерева вентиля:
меняет топологию соединений между вентилями
обмен коммутативных контактов: меняет соединения
декомпозиция вентилей: например заменить AND-OR на NAND-NAND
Булева перестройка: замена вентилей по законам Булевой алгебры
Обратные преобразования
сокращение размеров вентилей,
слияние вентилей, и т.д.
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
53
Lienig
Перестройка схем
© KLMH
8.5.3
a
b
vB
d
e
C(d) = 1
C(e) = 1
f
C(f) = 1
g
C(g) = 1
h
C(h) = 1
a
d C(d) = 1
e C(e) = 1
vA
b
f
vB
C(f) = 1
g C(g) = 1
h C(h) = 1
и сократить ёмкость вниз по течению
d
e
v
f
…
…
a
b
d
v
e
f
g
h
VLSI Physical Design: From Graph Partitioning to Timing Closure
v’
…
g
h
Chapter 8: Timing Closure
54
Lienig
a
b
Клонирование может сократить ёмкость разветвления выхода вентиля
© 2011 Springer Verlag
Перестройка схем
© KLMH
8.5.3
Переделка дерева разветвления входа может изменить значения AAT
a <4>
b <3>
(1)
f <6>
(1)
b <3>
c <1>
d <0>
(1)
f <5>
(1)
(1)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
55
Lienig
© 2011 Springer Verlag
c <1>
d <0>
a <4>
(1)
Перестройка схем
© KLMH
8.5.3
Переделка дерева разветвления выхода может изменить
задержки на конкретных путях
путь1
путь1
y1 (1)
(1)
(1)
(1)
(1)
y2 (1)
путь2
путь2
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
56
Lienig
© 2011 Springer Verlag
y2 (1)
Перестройка схем
© KLMH
8.5.3
Обмен коммутативных контактов может изменить задержку схемы
a <0>
b <1>
f <5>
(1)
(2)
c <2>
b <1>
a <0>
(1)
(1)
f <3>
(1)
(2)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
57
Lienig
© 2011 Springer Verlag
c <2>
(1)
(1)
Перестройка схем
© KLMH
8.5.3
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
58
Lienig
© 2011 Springer Verlag
Декомпозиция вентилей может изменить структуру схемы
Перестройка схем
© KLMH
8.5.3
Булева перестройка использует законы Булевой алгебры,
например, закон дистрибутивности, чтобы изменить топологию схемы
(a + b)(a + c) = a + bc
a <4>
(1)
b <1>
x <6>
(1)
y <6>
x <5>
(1)
y <6>
(1)
(1)
(1)
(1)
x(a,b,c) = (a + b)(a + c)
x(a,b,c) = a + bc
y(a,b,c) = (a + c)(b + c)
y(a,b,c) = ab + c
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
59
Lienig
c <2>
(1)
b <1>
c <2>
(1)
© 2011 Springer Verlag
a <4>
Маршруты проектирования
© KLMH
8.6
8.1
Введение
8.2
Временной анализ и требования производительности схем
8.2.1 Статический временной анализ (SТA)
8.2.2 Бюджеты задержки и алгоритм распределения временного запаса (ZSA)
8.3 Размещение с временной оптимизацией
8.3.1 Методы с упором на сети
8.3.2 Вложение STA в линейные программы для размещения
8.4 Трассировка с временной оптимизацией
8.4.1 Алгоритм ограниченного радиуса и стоимости
8.4.2 Компромисс Прима-Дейкстры
8.4.3 Минимизация задержки от источника до стока
8.5 Физический синтез схем
8.5.1 Масштабирование вентилей
8.5.2 Буферизация
8.5.3 Перестройка сетей
8.6 Маршрут проектирования с оптимизацией производительности схемы
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
60
Lienig
8.7 Заключение
Маршруты проектирования
© KLMH
8.6
Базовый маршрут физического проектирования
1. Планирование кристалла, размещение контактов I/O,
планирование сетей питания и земли
2. Логический синтез и технологическая специализация
3. Глобальное размещение и легализация элементов памяти
4. Синтез деревьев синхорсигнала
5. Глобальная трассировка и определение уровней металлизации
6. Легализация и детальное размещение с учётом перегруженности
7. Детальная трассировка
8. Производственные оптимизации
9. Физическая верификация
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
61
Lienig
10. Создание и оптимизация фотошаблонов
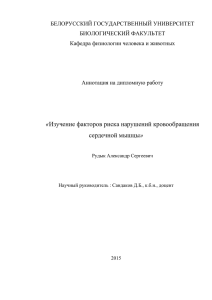
Маршруты проектирования
© KLMH
Видео
Видео
кодек
пре-/постпроссесинг;
цифровая
управление
обработка
потоком
Аудио
Аудио
пре-/постпроссесинг
кодек
Контроллер Поддержка
коммунидля
обработки кационных
протоколов
данных
Baseband DSP
Baseband
PHY
MAC/Control
Главный процессор
для приложений
VLSI Physical Design: From Graph Partitioning to Timing Closure
Блок
защиты
Память
Chapter 8: Timing Closure
62
Lienig
Аналого-цифровой
преобразователь (АЦП)
Аналоговые схемы
Пример: плана кристалла
© 2011 Springer Verlag
8.6
Маршруты проектирования
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
63
Lienig
© 2011 Springer Verlag
Пример: глобальное размещение
© KLMH
8.6
8.6
Маршруты проектирования
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
64
Lienig
© 2011 Springer Verlag
© KLMH
Пример: дерево синхросигнала
8.6
Маршруты проектирования
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
65
Lienig
© 2011 Springer Verlag
© KLMH
Пример: перегруженность при
глобальной трассировке
Маршруты проектирования
© KLMH
8.6
Chip Planning and Logic Design
Performance-Driven
Block Shaping, Sizing
and Placement
I/O Placement
Chip Planning
With Optional Net Weights
Performance-Driven
Block-Level
Delay Budgeting
Single Global Net Routes
and Buffering
Trial Synthesis and
Floorplanning
fails
Logic Synthesis and
Technology Mapping
Power Planning
RTL
Timing Estimation
passes
(полная блок-схема в Figure 8.26)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
66
Lienig
© 2011 Springer Verlag
Block-level or Top-level Global Placement
Маршруты проектирования
© KLMH
8.6
Block-level or Top-level Global Placement
Global Placement
Obstacle-Avoiding Single
Global Net Topologies
With Optional Net Weights
Physical Buffering
Delay Estimation
Using Buffers
OR
Layer Assignment
Virtual Buffering
Buffer Insertion
Physical Synthesis
(полная блок-схема в Figure 8.26)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
67
Lienig
Static
Timing Analysis
passes with
fixable violations
© 2011 Springer Verlag
fails
Маршруты проектирования
© KLMH
8.6
Physical Synthesis
Timing Correction
Timing-Driven
Restructuring
Boolean Restructuring
and Pin Swapping
AND
passes
Gate Sizing
Redesign of Fanin
and Fanout Trees
Routing
(полная блок-схема в Figure 8.26)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
68
Lienig
Static
Timing Analysis
© 2011 Springer Verlag
fails
Маршруты проектирования
© KLMH
8.6
Routing
Legalization of
Sequential Elements
Clock Network Synthesis
With Layer Assignment
Timing-Driven Routing
passes
(Re-)Buffering and
Timing Correction
Global Routing
fails
Static
Timing Analysis
Detailed Routing
Timing-driven
Legalization + CongestionDriven Detailed Placement
2.5D or 3D
Parasitic Extraction
(полная блок-схема в Figure 8.26)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
69
Lienig
© 2011 Springer Verlag
Sign-off
Маршруты проектирования
© KLMH
8.6
Sign-off
passes
Manufacturability,
Electrical, Reliability
Verification
passes
Mask Generation
Design Rule Checking
Layout vs. Schematic
Antenna Effects
Electrical Rule Checking
(полная блок-схема в Figure 8.26)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
70
Lienig
Static Timing Analysis
fails
© 2011 Springer Verlag
ECO Placement and Routing
fails
© KLMH
Обзор Главы 8 – Временные ограничения и временной анализ
Задержка схем оценивается на сигнальных путях
От первичных входных контактов до элементов памяти;
от элементов памяти до первичных выходных контактов
Между элементами памяти
Компоненты задержки на путях
Задержки вентилей: верхняя оценка по худшему перекючению
(чтобы обеспечить быстрый статический временной анализ)
Задержки проводов: зависят от длины проводов и топологии
(для сетей с >2 контактами)
Временные ограничения
Фактические врменя прибытия (AATs) в первичные входы
и выходы элементов памяти
Требуемые врменя прибытия (RATs) в первичные выходы
и входы элементов памяти
Статический временной анализ
Два прохода считают AAT и RAT для каждого вентиля (и сети)
за линейное время
В каждой временной точке: запас = RAT-AAT
Отрицательный запас = временное нарушение;
срочные сети/вентили определяются по отрицательному запасу
Бюджеты: делят задержку схемы на границы задержки сетей и вентилей
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
71
Lienig
Размещение вентилей/ячеек влияет на длину проводов,
которая влияет на задержку сетей
Размещение с врменной оптимизацией оптимизирует координаты
вентилей/ячеек чтобы улучшить временные характеристики
© KLMH
Обзор Главы 8 – Размещение с временной оптизацией
Временной анализ находит срочные сети, им уделяется особое внимание
Длина проводов должна быть низкой, иначе трассировка провалится
Временная оптимизация часто усугибляет перегруженность
Размещение с контролем весов сетей
Самый простой метод размещения с временной оптимизацией
После начального размещения, запускает временной анализ
и подсчитывает веса для сетей
Размещение с бюджетами задержек сетей
Назначает границы задерки для каждой сети;
переводит границы задержки в границы длин
Выполняет размещение с соблюдением границ длин сетей
Размещение с использованием линейного программирования
Сводится к системе уравнений и неравенств
Временной анализ и оптимизация представлены особыми неравенствами
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
72
Lienig
Обзор Главы 8 – Трассировка с временной оптимизацией
Трассировка с временной оптимизацией многогранна
© KLMH
Индивидуальные сети: компромисс между длиной и глубиной
Ёмкость соединения и целостость сигнала: параллельные провода создают
конденсаторы и могут замедлить/ускорить переключение сигналов
Оптимизация всей схемы: определить очерёдность оптимизации сетей
Оптимизация индивидуальных сетей
Крайний случай: независимые трассы от источника до каждого стока
(высокая длина, возможно низкая задержка)
Крайний случай: минимальное остовное дерево (низкая длина, выс. задержка)
Компромисс: гибрид алгоритмов Прима и Дейкстры
Ёмкость соединений и целостность сигнала
Параллельные провода требуют особого внимания
когда они переключаются одновременно
Определив срочные сети, ограничить перекрёстный шум на них
отдалив соседние провода
Оптимизация всей схемы
После предварительной трассировки, временной анализ находит срочные сети
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
73
Lienig
Оптимизировать индивидуальные сети, повторить
В прошлом, размещение и трассировка использовали завершёную схему
Сегодня, неперспективно рано фиксировать размеры вентилей
и топологии сетей – это не учитывает более точного временного анализа
© KLMH
Обзор Главы 8 – Физический синтез схем
Координаты вентилей и трассы сетей ещё не доступны
Физический синтез перестраивает схему
с использованием предварительного размещения
Буферизация сетей: разбивает сеть на меньшие куски (~равной длины)
Длиная сеть может иметь слишком высокую ёмкость,
ведущий вентиль может быть слишком слабым
Масштабирование вентилей/буферов: повышает силу ведушего вентиля
& его физические размеры
У больших вентилей высокая ёмкость входного контакта,
но малое сопротивление выходного контакта
Большие вентили могут вести больше вентилей, длиные сети;
переключаются быстрее
Большие вентили требуют больше места,
большие ведущие вентили вверх по течению
Клонирование вентилей: разделяет большие разветвления выхода
Дублированые вентили могут быть разнесены (чего один вентиль не позволяет)
VLSI Physical Design: From Graph Partitioning to Timing Closure
Chapter 8: Timing Closure
74
Lienig