Магнитогидродинамический элемент в задачах стабилизации ракет-носителей и космических аппаратов Б.И. Рабинович
реклама

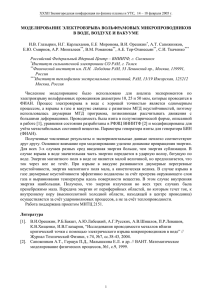
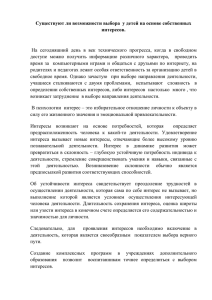
Магнитогидродинамический элемент в задачах стабилизации ракет-носителей и космических аппаратов Б.И. Рабинович Электронная версия В.И. Прохоренко и А.В. Гришин Магнитогидродинамический элемент в задачах стабилизации ракет-носителей и космических аппаратов Рассматривается применение для стабилизации динамически неустойчивых объектов системы управления с магнитогидродинамическими исполнительными элементами. Математическая модель МГД элемента приводится к модели эквивалентного осциллятора. Возможности системы управления с МГД элементами иллюстрируются на двух примерах: обеспечение устойчивости продольных колебаний корпуса жидкостной ракеты-носителя космических аппаратов (борьба с явлением POGO) и устойчивости КА, имеющего упругую антенну, расположенную вдоль оси закрутки (КА типа Авроральный зонд проекта ИНТЕРБОЛ). 2 • Общая схема 3 МГД элемент r • Числа Рейнольдса, Струхаля и Альвена I U Re Vl ; • ReM l Sh V ; VF 2 M Sh M ; V U ma x; M 2 ; Al a 2 . V • Определяющие константы M 1 ; 0 M l M ; aH 0 . • Критерии применимости математической модели Re 1; Sh ~ 1; Re M 1; Sh M 1; Al 1. Vortex Processes and Solid Body Dynamics Spacecraft and Magnetic Levitation Systems Dynamic Problems by Boris I. Rabinovich Moscow Institute for Control Devices Design, Russia Valeriy G. Lebedev Research and Design Institute, Moscow, Russia Alexander I. Mytarev Research and Design Institute, Moscow, Russia translated by A.S.. Leviant FLUID MECHANICS AND ITS APPLICATIONS 25 Translated from the Russian October 1994, 308 pp. Kluwer Academic Publishers Математическая модель МГД элемента 4 • Общие уравнения m* U α(J I) β t dτ U tτ 0; (τ )dτ t J * 0; L J I αU γ tτ *J αU R I δ(t). LI L • Эквивалентный осциллятор γ 0; R 0; δ δ 0 e it ; U r ; t (r r r r2r) k δ(t)dt. 0 U – скорость перемещения жидкости; I – внешний ток; J – вихревой ток. Модельная задача 5 y Y~ θ η θ G 0 M O0 x • • • • G – центр масс; M – МГД элемент; О0 – акселерометр; Y – неконсервативная сила Обеспечение динамической устойчивости s2 a a as s 0; s2 a as s 0; s s2 s as as as ( x0 ) 0; 1 a ~ ; as ~ ; as ~ ; as ~ . 2 2 • Математическая модель • Характеристическое уравнение и достаточное условие устойчивости p s2 ) 2 a a p4 ](p2 s2 ) [as as x0 as as 0 a a ](p 2 s2 )p 2 a a a x p4 0; s s [( 2 as as x as as a a 0 0 6 Проблема POGO • Деформация корпуса РН при продольных колебаниях Частоты собственных продольных колебаний корпуса (f q j ) и жидкости в магистрали О2 (f s 2 ) РН Сатурн 5 ( ___ AS-501, AS-502 ; __ . __ AS – 503) 7 Математическая модель POGO. РН с МГД элементом и акселерометром ξ a ξs s a ξr r a δ s ; q β q ω 2 q a s a q q qs a δ ; q s qr r s β s ω 2 s a ξ a q 0; s sξ sq s r β r ω 2 r a ξ a q a δ ; s rξ rq r r s L (p) ; , s, s 0 ; , r, 0; L (i) A () exp[ i ()]; 2 s0 a 0 s (s s s s); 2 ( ( 0)q). 0 s x , q, s, r – обобщенные координаты корпуса, доминантного тона его продольных упругих колебаний и колебаний жидкости в магистрали и в МГД элементе 8 Вещественные части корней характеристического уравнения 1 q 2 1 s 2 q q Bs ( 1 s s ) q Br ( ) 1 q Bs ( ) ; q ) ; s Br ( a s a a As ( ) sin s ( ); Bs Br ( ) a r a r A r ( ) sin r ( ). 2 0 ( ) a a x s q a q q qr ; 1; . 2 a s a a r s ( ) 0 s • Безразмерные параметры: , , . • Индексы: q - корпус; s - магистраль; r - МГД элемент 9 Маркировка областей устойчивости и неустойчивости L s ( p ) 0 ; L r ( p ) 0 или 0 q s Устойчивость Знак <0 Маркировка <0 - - Неустойчивость Знак >0 Маркировка Знак + -- <0 Маркировка Знак Маркировка <0 >0 - + >0 >0 + + 110 0 Области устойчивости и неустойчивости. ЖРД с фазовым запаздыванием α +1 β<0 α • Исходная магистраль (неустойчивость на частоте ~ q) 0 --+ 1 1 --++ -1 β>0 0 • Магистраль с гидроаккумулятором (устойчивость) +- 1 2 Области устойчивости и неустойчивости. ЖРД с фазовым опережением α α • Исходная магистраль (неустойчивость на частоте ~ q) -++1 β<0 0 0 + -++- -+ --++ +-++ 0 • Магистраль с гидроаккумулятором (неустойчивость на двух частотах: ~ s и ~ q ) 0 +- -+ 1 1 β>0 Алгоритм управления МГД элементом B ( ) B ( ), B ( ) B ( ); • B ( ) 0, B ( ) 0. r q r q s r q r s s 1 3 Сопряженное управление s s • Вещественные части корней характеристического уравнения 1 q 2 1 s 2 ); q * q q Br ( * * s ) ; s s Br ( ; t tk ; 0 1. Области устойчивости и неустойчивости. 14 ЖРД с фазовым опережением α ++ -1 0 --+ • Магистраль с гидроаккумулятором и демпфером (неустойчивость на частоте ~ q) 0 β>0 • Дополнительное управление с МГД элементом и акселерометром (устойчивость) α --++ -1 β>0 +- Авроральный зонд (АЗ) проекта ИНТЕРБОЛ • Упругая антенна расположена вдоль оси закрутки 15 а) б) в) 8 6 4 2 0 -2 -4 -6 16 • а) 23.10.96, 17 : 38 MT; • б) 24.10.96, 05 : 10 MT; • в) 02. 08.97, 07 : 20 MT Примеры развитой неустойчивой нутации АЗ при 0= 3/ с, ТМИ СД -8 -8 -6 -4 -2 0 2 4 6 8 Эволюционно зрелая неустойчивая нутация А3, включение системы β о α о 17 коррекции (а, б), ТМИ СД: a) • a) 23.10.96, 05 : 58 MT, 0= 3/c ; • б) 24.10.96, 11 : 47 MT, 0= 3/c; • в) 03.09.96, 12 : 04 MT, 0= 4/c б) в) Основные обозначения 18 • j (j = 2, 3) – углы отклонения связанной системы координат относительно инерциальной; • j (j = 2, 3) - компоненты абсолютной угловой скорости в связанной системе координат; • p j, q j (j = 1, 2) – относительные перемещения присоединенных масс упругого и МГД элементов; • m, l – присоединенная масса и длина упругого элемента; • а – расстояние от точки крепления упругого элемента до центра масс КА; • 0 – угловая скорость закрутки КА; • c – частота собственных колебаний упругого элемента. Математическая модель КА типа АЗ с МГД элементом и акселерометрами (k=2) и неуправляемого КА (k=1, a0=0, a1=0) 19 i ( I 1) I kD( 2i ) 0; • Уравнения ( 2i ) 2i a1 ( i) a0 . движения • Обобщенные координаты • Основные параметры q1 q2 p1 p 2 q ip θ θ 2 iθ3; ; q ; p ; z0 2 2 2 i3 θ iθ; θ dθ ; d ; t. 0 d d c J1 J 2 I ; Δ σ 1; J J2 J3; σ ; J 0 D m z02 J ; z0 a l. Области устойчивости и неустойчивости КА типа АЗ -1 -0,5 0 0,5 1 20 - - устойчивость 1,5 1 0,053 0,055 0,03 0,04 0,05432 0,06 0,065 0,07 0,8 0,6 -- 0,4 0,2 + - неустойчивость по одному корню 0 -0,2 ++ +- -0,4 -0,6 -0,8 -1 I ++ неустойчивость по двум корням Корневые годографы при изменении параметра (толстая линия - точные, тонкая линия _ приближенные) -0,46 -0,36 -0,26 -0,16 -0,06 0,04 1,5 0.07 Im 0,3 =0.07 0.06 -0,08 -0,06 -0,04 -0,02 Годограф второго корня Годограф третьего корня 0,1 0.06 -0,1 Re 0.05432 0 0,02 0,04 0.04 0.04 0.03 -0,3 0,06 0.03 -0,5 Годограф четвертого корня 0.07 0.06 0.05432 0,5 0 -0,5 -1,5 0.03 -2 0.06 0.04 0.07 0.06 0.05432 1 0.04 0.03 -1 0.04 0.05432 Значение мнимой части вторго корня, вычисленное по приближенным формулам 0.07 Im 0.03 -2,5 Re 21 Корневые годографы при изменении параметров и I 22 0.9 Im 0.8 6 7 8 9 -0.3 10 11 12 13 Годограф второго корня 0.7 1 2 -0.5 3 4 0.6 5 0.5 24 18 17 16 -0.02 0 -0.1-0.1 0.1 -0.2 -0.3 -0.4 14 15 13 11 10 19 0.2 9 -0.01 16 9 20 10 11 1 2 - 24 22 0.5 8 7 6 4 23 0 12 - 14 0 -0.1 5 21 0.1 Годограф третьего корня 12 15 -0.03 0.1 18 8 20 -0.04 17 0.3 21 0.2 15 7 22 19 16 14 0.4 1 24 23 22 21 200.3 19 18 17 2 0.3 -0.5 6 23 0.5 40.4 I 3 5 13 3 Re 0.01 0.02 рис.3 0.03 Аналитическое решение в случае КА типа АЗ (2i ) 0; 0 e ; 23 0 t; 2 (2i ) 0; 1 (1 ) i( 1); 2 • Вектор с ; 0 A exp[ i ( 1)] B exp [i ( 1). • Годограф вектора 2 ( ) B(1 )(1 cos 2); 2 arg[()] ( 1); ( 1) A C2 exp[ ]; 2 AB 2 A B 2 C2 C1 exp( ); ( 1) B C1 exp[ ]. 2 Варьируемые параметры математической модели АЗ и начальные условия (c = const = 0.0465 c-1) Рис. № Параметры Начальные условия и время модели интегрирования 0 /с 0 θ20 20 /с 30 /с t с 25а 3.0 0.68 0.0033 0 0 5500 25б 4.0 0.68 0.0033 0 0 1500 26а 3.0 0.165 4.0 -0.05 -0.05 540 26б 3.0 0.165 2.5 -0.02 -0.02 540 26в 3.0 0.165 2.0 -0.28 0.28 450 24 Начальная стадия неустойчивой нутации АЗ при 0 = 3/ с и при 0 = 4/с, математическое моделирование • a) См. табл. 24 25 0.20 0.20 0.10 0.10 0.00 b,grad 0.00 -0.10 -0.10 -0.20 -0.20 -0.20 -0.10 0.00 -0.30 -0.30 -0.20 -0.10 0.00 a,grad 0.10 0.20 • б) См. табл. 24 0.10 0.20 4.00 2.00 a) 0.00 Развитая неустойчивая нутация АЗ при 0 = 3° / с, математическое моделирование -2.00 • а), б), в) см. табл. 24 -4.00 -4.00 -2.00 0.00 2.00 4.00 8.00 8.00 4.00 4.00 б) 0.00 -4.00 -8.00 -8.00 -4.00 0.00 4.00 8.00 в) 0.00 -4.00 -8.00 26 -8.00 -4.00 0.00 4.00 8.00 Области устойчивости и неустойчивости в параметрах а0 , а1 (0 = 0.06 с -1) a0 -20 -15 -10 -5 0 5 10 27 15 6 неустойчивость по второму корню 5 неустойчивость по третьему корню 4 неустойчивость по двум корням устойчивость а0=2, а1=3 а0=3, а1=2.5 а0=0.5, а1=2 3 2 1 0 -1 -2 a1 Области устойчивости и неустойчивости в параметрах а0 , а1 (0 = 0.03 с -1) a0 -25 -20 -15 -10 -5 0 5 28 10 5 неустойчивость по второму корню 4 неустойчивость по третьему корню неустойчивость по двум корням устойчивость а0=2, а1=3 3 а0=3, а1=2,5 а 0 =0.5, а 1 =2 2 1 0 -1 a1 -2 Корневые годографы КА типа АЗ с МГД элементами и акселерометрами в контуре управления (а0=2, а1=3) при изменении параметра (толстая линия - точные, тонкая линия _ приближенные) 0.045 -0,02 0 6 0,02 -0,1 0.04 0.035 годограф третьего корня 0.035 -0,4 0.03 -0,07 -0,06 -0,05 -0,04 -0,03 -0,02 -0,01 0,0 3 3 -0,4 0,01 Im 1 Re 0 -0,5 0 -0,2 2 годограф четвертого корня -0,6 Re 0,0 3 0,0 35 0,0 4 0,0 35 0,0 4 0,0 45 0.0 6 0,0 45 0.0 54 32 0.0 5 0.0 7 0.0 5 0.0 54 32 0.0 6 0,2 4 0 -0,5 0.0 7 0,6 0,4 Годограф второго корня -0,3 0.03 0,8 1 5 -0,2 0.04 1,2 0,0 3 Re 0 7 0,0 4 -0,06 0.05-0,04 0.05432 0.05 0.045 0.0 6 0.0 7 0.05432 Im 1,4 0,0 35 -0,08 0.06 0,1 0.0 54 32 0 .05 0.0 0,0 6 0.0 4 0,0 5 54 32 0,0 4 3 0,0 5 0.0 3 0,0 5 45 -0,1 0,2 0.0 7 0.06 1,6 Im 0.07 -0,12 8 0,3 0.07 -0,3 -0,2 -0,1 -1 0 0,1 29 Математическое моделирование нутации гироскопически устойчивого КА типа АЗ (c = 0.06 c -1) Годограф конца вектора S относительных перемещений массы m при упругих деформациях стержня 30 0,002 3 0,0015 0,001 0,0005 2 0,01 0 -p -0,002 0,008 0,002 q 0 -0,002 -0,004 -0,006 -0,0005 0 0,0005 0,001 -0,001 0,004 -0,005 -0,001 -0,0005 0,006 -0,01 -0,0015 0 0,005 0,01 -0,0015 0,015 Годограф вектора , образованного компонентами абсолютной угловой скорости вращающегося объекта Математическое моделирование одноосной стабилизации гироскопически устойчивого КА типа АЗ с МГД элементами и акселерометрами (с = 0.06 c -1, a0 = 2, a1= 3) Годограф конца вектора S относительных перемещений массы m при упругих деформациях стержня 0,04 31 3 0,03 0,02 0,01 0,8 0 -p -0,06 0,6 q -0,4 -0,01 0 0,02 -0,04 0 -0,2 -0,02 -0,03 0,2 -0,5 -0,04 -0,02 0,4 -1 2 0 0,5 1 -0,05 -0,06 -0,6 -0,8 -1 -1,2 Годограф вектора , образованного компонентами абсолютной угловой скорости вращающегося объекта 32 Математическое моделирование нутации гироскопически неустойчивого КА типа АЗ (c = 0.03 c-1) Годограф конца вектора S относительных перемещений массы m при упругих деформациях стержня 0,06 3 0,04 0,02 2 0 -0,06 -p -4 -2 -0,02 0 -0,02 2 -0,04 1 -0,06 -1 0,02 0,04 0,06 0,08 -0,08 0 -6 -0,04 3 0 2 q 4 -0,1 -2 -3 -4 Годограф вектора , образованного компонентами абсолютной угловой скорости вращающегося объекта Математическое моделирование одноосной стабилизации 33 гироскопически неустойчивого КА типа АЗ с МГД элементами и акселерометрами (с = 0.03 c-1, а0 = 2, а1 = 3) Годограф конца вектора S относительных перемещений массы m при упругих деформациях стержня 0,06 3 0,04 0,02 5 -p 2 0 4 -0,06 3 -0,04 -0,02 0 0,02 0,04 0,06 -0,02 2 -0,04 1 q 0 -4 -2 -1 -2 -3 -4 -0,06 0 2 4 6 Годограф вектора , образованного компонентами абсолютной угловой скорости вращающегося объекта МГД элемент в форме жидкого гироскопа Области устойчивости и неустойчивости 34 Математическая модель ( ih~ ) [h~ (1 ) 2 h~ 2 / 4] 0; ~ 0 s / r0 ; s q ip; / 0 ; h h /r0 . r0 , h - средние радиус и толщина слоя жидкости Корни характеристического уравнения ~ ~ ~ 2 ( ih ) h (1 ) 2 h 2 / 4 0; ~ ~ h ( i )(1 ); h (1 ) . 2 2 Границы устойчивости ~ / 2; 1, 2 h 1, 2 1 ~ / 2. h Магнитогидродинамический элемент в задачах стабилизации ракет-носителей и космических аппаратов 35 Основные результаты Применение в РКТ ЖРД нового поколения, обладающих фазочастотными характеристиками давление на входе в насос – давление в камере сгорания с фазовым опережением на доминантных частотах колебаний замкнутой системы корпус РН – жидкость в магистрали повышает вероятность динамической неустойчивости этих колебаний (явления POGO). Применение на КА с одноосной стабилизацией низкочастотных упругих элементов, расположенных вдоль оси закрутки, может приводить к неустойчивости стационарного вращения КА вокруг оси максимального момента инерции. При этом логарифмический инкремент нутационных колебаний пропорционален соответствующему декременту собственных колебаний упругого элемента и разности угловой скорости закрутки КА и круговой частоты этих колебаний Магнитогидродинамический элемент в задачах стабилизации ракет-носителей и космических аппаратов 36 Основные результаты (продолжение) Одним из возможных методов борьбы с такого рода явлениями, позволяющим кардинально решать подобные задачи, когда другие методы оказываются мало эффективными, является создание дополнительного контура управления, включающего МГД исполнительные элементы и интегрирующие акселерометры, ДУС или другие измерители. Работа выполнена при частичной поддержке РФФИ (грант 97-01-00536)