СЛ_Измерение R_L_C_ЦИИУ_
реклама

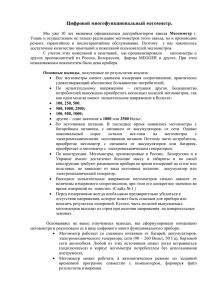
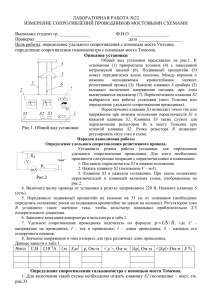
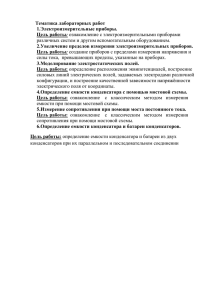
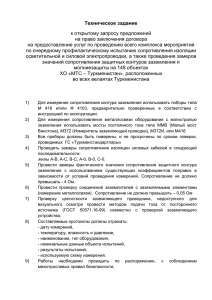
Слайд-лекция на тему: «Измерители сопротивления, емкости, индуктивности» по дисциплине: «Цифровые и интеллектуальные измерительные устройства» Старший преподаватель кафедры Приборостроения Белик Михаил Николаевич Специальность 5B071600 - Приборостроение План лекции: 1. Общие сведения; 2. Метод дискретного счета; 3. Метод уравновешивающего преобразования; 4. Цифровые автоматические приборы с микропроцессором. Общие сведения Цифровые средства измерения параметров элементов электрических цепей чаще всего используют сочетание аналогового преобразователя, преобразующего определяемый параметр элемента в активную величину, и цифрового прибора для измерения этой величины. В цифровых измерительных приборах используют два основных метода: - метод дискретного счета; - метод уравновешивающего преобразования. Метод дискретного счета является метод прямого преобразования значений сопротивления, индуктивности и емкости в пропорциональный интервал времени и измерение этого интервала путем заполнения счетными импульсами. Второй способ цифрового измерения параметров элементов использует уравновешивающее преобразование сопротивления, индуктивности и емкости, основанное на сравнении измеряемой величины с образцовой. Метод дискретного счета При методе дискретного счета используют закономерности апериодического процесса, возникающего при подключении заряженного конденсатора или катушки индуктивности с протекающим в ней током к образцовому резистору. При измерении активного сопротивления применяют процесс разряда образцового конденсатора через измеряемый резистор. Преобразователи отличают высокая точность, быстродействие, линейность функции преобразования, удобная для преобразования в цифровой код видом выходного сигнала. Преобразователь параметров элементов в интервал времени а) схема; б) измерительные цепи; Измерительная цепь ИЦ интегрирующего типа с постоянной времени х = R0CX (или RXC0, или LХ/R0 — рис. б) питается выходным напряжением операционного усилителя ОУ, являющегося компаратором. Порог его срабатывания задают делителем R1 и R2. Временные диаграммы работы преобразователя параметров элементов При поступлении в момент времени t0 на ИЦ с выхода ОУ напряжения U0 происходит его интегрирование измерительной цепью. Напряжение инвертирующем ОУ: на входе u(t) = U0(1+β)(1-e-t/x)-βU0, где β = R2/R1+R2) — коэффициент передачи цепи положительной ОС. Структурная схема цифрового измерителя емкости и сопротивления реализующая метод дискретного счета Перед измерением ключ Кл устанавливают в положении 1 и конденсатор Сх заряжается через ограничительный резистор RД до значения стабилизированного источника напряжения Е. Временные диаграммы цифрового измерителя В момент начала измерения емкости t1 управляющее устройство импульсом управления переключает триггер из состояния 0 в состояние 1, очищает предыдущие показания счетчика импульсов и переводит ключ Кл в положение 2. Измеряемый конденсатор Сх начинает разряжаться через образцовый резистор Roбp по экспоненциальному закону, который описывают уравнением: UC = Ee-(t - t1)/, где = RобрCХ — постоянная времени цепи разряда конденсатора. В момент времени tx единичный импульс напряжения UT с выхода триггера открывает схему совпадения и счетчик начинает счет тактовых импульсов генератора, следующих с некоторой частотой f. Поскольку = RoбpCx, то при фиксированных значениях частоты f и сопротивления Roбp CX = N/(f Rобр) = N/K1. Здесь коэффициент К1 =f Roбp. Следовательно величина измеряемой емкости прямо пропорциональна числу импульсов N, поступивших на счетчик. Наличие образцового конденсатора Собр позволяет аналогичным образом измерить сопротивление резистора: RX = N / (f Cобр) = N / K2, где коэффициент K2 = f Cобр. Достоинства метода - достаточно высокую точность измерений. Погрешность измерений цифровым методом составляет 0,1... 0,2 % и зависит в основном от нестабильности сопротивлений резисторов R1, R2, Roбp или конденсатора Собр, нестабильности частоты f генератора счетных импульсов, а также неточности срабатывания устройства сравнения. Недостатки трудность измерения параметров на рабочей частоте. Метод уравновешивающего преобразования Сравнение измеряемой величины с образцовой чаще всего осуществляют путем уравновешивания мостовой измерительной цепи, в одно из плеч которой включают исследуемый двухполюсник. В смежное плечо моста вводят образцовый элемент, представляющий собой набор квантованных образцовых мер, соответствующих весовым коэффициентам разрядов используемого цифрового кода. Изменением параметров образцового двухполюсника добиваются равенства нулю напряжения в измерительной диагонали. Структурная схема цифрового моста постоянного тока уравновешивающего типа Измеряемый резистор Rx, образцовые резисторы R1 и R2 и преобразователь кода в сопротивление ПКС образуют мост, который питается источником постоянного напряжения ИП. Разбаланс моста фиксируют устройством сравнения УС. Устройство управления УУ анализирует выходной сигнал УС и в зависимости от его знака увеличивает или уменьшает значение цифрового кода N, выдаваемый на ПКС. Уравновешивание производится до тех пор, пока напряжение в выходной диагонали моста не станет меньше порога чувствительности УС. При этом измеряемое сопротивление RX = R1 R ПКС / R2 = kПКС N R1 /R2, где RПКС —сопротивление ПКС; kПКС= RПКС/N— коэффициент преобразования ПКС. Результат измерения не зависит от напряжения питания. Пределы измерения подбирают путем изменения отношения сопротивлений резисторов R1 и R2 цепи положительной обратной связи. Цифровые мосты постоянного тока уравновешивающего типа обеспечивают погрешность измерения параметров около 0,01 % и их широко применяют для измерения активного сопротивления резисторов. Мосты переменного тока измеряют комплексное сопротивления, индуктивность и емкость при определенной частоте (1 кГц). Они производят раздельное и независимое уравновешивание двух составляющих комплексного сопротивления Zx. Цифровые автоматические приборы с микропроцессором В цифровых автоматических приборах измерения R, L, C используют методы, связанные с преобразованием измеряемого параметра в напряжение или ток, частоту или интервал времени, а также измерительные устройства, построенные на основе мостовых и компенсационных схем. Наибольшее распространение в практике измерений получили цифровые автоматические приборы с микропроцессором, выполненные по схемам с использованием уравновешенных мостов. Уравновешивание моста осуществляют автоматическим регулированием двух органов моста (для каждого из измеряемых параметров). Cтруктурная схема цифрового автоматического измерителя комплексного сопротивления с микропроцессором В основе данного способа измерения параметров цепей цифровым прибором лежит мостовой метод с фазочувствительными детекторами уравновешивания. Питание мостовой схемы осуществляют от генератора переменного напряжения. Микропроцессор с встроенным тактовым генератором определенной частоты выполняет все функции управления измерительным процессом. Напряжение разбаланса моста Up через усилитель сигнала разбаланса поступает на входы фазовых детекторов активной (АС) и реактивной (PC) составляющих. Опорные напряжения фазовых детекторов снимают с мостовой схемы. С фазовых детекторов напряжение разбаланса подают на реверсивные счетчики, управляющие состоянием органов уравновешивания мостовой схемы, и на микропроцессор, задающий сигналами UAC и UPC скорость счета соответствующих реверсивных счетчиков. Направление счета реверсивных счетчиков определяет знак напряжения разбаланса фазовых детекторов, скорость счета — уровень этого напряжения. Изменение состояния счетчика, вызванное приходом на мост каждого тактового импульса Up тактового генератора, приводит к изменению значения регулирующего параметра на одну единицу младшего разряда. Опорные напряжения фазовых детекторов выбирают такими, что сигналы, вырабатываемые ими, определяются отклонением органа управления от состояния равновесия: сигнал одного детектора отклонением по активной составляющей АС, сигнал другого — по реактивной составляющей PC. Управление мостом осуществляют сигналом Ur микропроцессора. По мере приближения к состоянию баланса моста напряжение разбаланса уменьшается, вследствие чего замедляется скорость его уравновешивания. При достижении состояния равновесия мостовой схемы, дискретное уравновешивание прекращается, и результаты измерения параметра поступают на ЦОУ. Микропроцессор автоматически осуществляет самокалибровку прибора перед началом измерений, и учитывает влияние внешних условий на точность измерений. Рекомендуемая литература 1. Раннев Г. Г. Методы и средства измерений: Учебник для вузов / Г. Г. Раннев, А.П. Тарасенко. – 6-е изд., стереотип. – М.: Издательский центр «Академия», 2010. – 336 с. 2. Аналоговые электроизмерительные приборы: Учебное пособие для вузов по специальности "Информационно-измерительная техника" /Бишард Е.Г. и др. –2-е изд., перераб. и доп. – М.: Высшая школа, 1991. – 415 с. 3. Информационно-измерительная техника и электроника: учебник для студ. высш. учеб. заведений / [Г. Г. Раннев и др.]; под ред. Г. Г. Раннева – М.: Издательский центр «Академия», 2009. – 512 с. 4. Ратхор Т.С. Цифровые измерения. АЦП/ЦАП. Москва, Техносфера, 2006. – 392с. Задания для СРС 1. Какие основные методы измерения параметров электрических цепей используются в цифровых приборах? 2. В чем состоит метод дискретного счета? 3. Объясните, в чем заключается метод уравновешивающего преобразования сопротивления, индуктивности и емкости. 4. Нарисуйте структурную схему цифрового измерителя емкости и сопротивления. 5. Объясните принцип действия цифрового моста постоянного тока уравновешивающего типа.