Digital Signal Processing Лекция 7 DSP
реклама

Digital Signal Processing
Лекция 7
DSP
Методы проектирования и расчета
цифровых фильтров
• Расчет цифровых БИХ-фильтров по данным аналоговых
фильтров
–Метод инвариантности импульсной характеристики
–Метод билинейного преобразования
• Обзор методов расчета аналоговых ФНЧ
–Фильтры Баттерворта
–Фильтры Чебышева
–Эллиптические фильтры (Золотарева-Кауэра)
• Расчет БИХ-фильтров стандартных типов методом
обобщенного билинейного преобразования
• Примеры расчета фильтров на основе билинейного
преобразования
• Машинное проектирование цифровых БИХ-фильтров
DSP
Анализ и проектирование цифровых фильтров
В наиболее общем смысле цифровой фильтр представляет собой
дискретную линейную систему с постоянными параметрами, которая
реализуется на основе использования арифметического устройства с
ограниченной точностью. Проектирование цифрового фильтра включает
три основных этапа:
1) определение требуемых свойств системы;
2) аппроксимацию этих требований на основе использования физически
реализуемых дискретных систем;
3) реализацию системы при использовании арифметики с ограниченной
точностью.
Несмотря на то что эти три этапа не являются независимыми, мы
сосредоточим внимание в первую очередь на втором этапе, поскольку
первый из них в сильной степени зависит от конкретного применения, а
третий требует специального рассмотрения.
При практической постановке задачи наиболее характерен случай, когда
требуемый цифровой фильтр должен быть использован для фильтрации
цифрового сигнала, который получен из аналогового сигнала путем
образования периодических выборок. Требования как для аналоговых,
так и для цифровых фильтров часто (но не всегда) задаются в частотной
области, как, например, в случае частотно-избирательных фильтров,
таких, как фильтры нижних или верхних частот и полосовые фильтры.
DSP
Анализ и проектирование цифровых фильтров
a
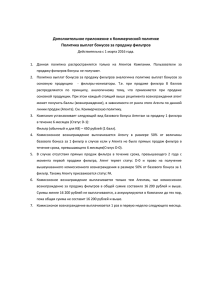
Рисунок 1. Допустимые пределы для аппроксимации идеального фильтра нижних частот.
Отдельной проблемой является определение соответствующего набора
требований для конкретного цифрового фильтра. Например, в случае
фильтра нижних частот такие требования часто принимают вид допусков
на ошибки аппроксимации, как показано на рис.1. На этом рисунке
пределы допустимой ошибки аппроксимации определены
горизонтальными линиями со штрихами. Заметим также, что достаточно
начертить кривую только для 0, поскольку остальная часть может
быть выведена на основе свойств симметрии. Пунктирная кривая
представляет частотную характеристику системы, удовлетворяющую
заданным требованиям.
DSP
Анализ и проектирование цифровых фильтров
В данном случае имеется полоса пропускания, в пределах которой
характеристика должна аппроксимироваться величиной, равной 1
с ошибкой 1, т.е. 1-1|H(еj)| 1+1, p. Имеется полоса
непропускания, в которой характеристика должна
аппроксимироваться нулевым значением с ошибкой не больше,
чем 2, т. е. |H(еj)| 2, a||. Граничные частоты для полосы
пропускания p и для полосы непропускания a заданы с
помощью угловой частоты z-плоскости (цифровые частоты). Чтобы
сделать возможной аппроксимацию идеального фильтра нижних
частот таким способом, мы должны также представить
переходную полосу ненулевой ширины (a - p), в которой
характеристика плавно спадает от значения в полосе пропускания
до значения в полосе непропускания. Многие из фильтров,
используемых на практике, задаются такой совокупностью
допусков (но без ограничений на фазовую характеристику), кроме
тех, которые налагаются требованиями устойчивости и
физической реализуемости.
DSP
Анализ и проектирование цифровых фильтров
При данной совокупности требований следующим этапом
является нахождение линейной дискретной системы,
характеристика которой изменяется в пределах указанных
допусков. С этой точки зрения проблема расчета фильтра
становится проблемой аппроксимации. В случае БИХ-систем мы
должны аппроксимировать требуемую частотную характеристику
с помощью рациональной функции, тогда как в случае КИХсистемы мы имеем дело с полиномиальной аппроксимацией. Для
удобства рассмотрение построено так, чтобы провести различие
между методами расчета, которые соответствуют БИХ- и КИХфильтрам. Будут рассмотрены различные методы расчета для
обоих типов фильтров. Эти методы включают как процедуры в
замкнутой форме, которые сводятся к подстановке значений
заданных параметров в расчетные формулы, так и метод
оптимизации, где решение получается с помощью итерационной
процедуры.
DSP
Анализ и проектирование цифровых фильтров
Расчет цифровых БИХ-фильтров по данным аналоговых
фильтров
Традиционный подход к расчету цифровых БИХ-фильтров включает
преобразование аналогового фильтра в цифровой фильтр,
удовлетворяющий заданным требованиям. Это является разумным
подходом, потому что
1) способы расчета аналоговых фильтров являются хорошо
отработанными и, поскольку могут быть получены полезные
результаты, оказывается выгодным использовать уже развитые для
аналоговых фильтров процедуры расчета;
2) многие полезные методы расчета аналоговых фильтров имеют
сравнительно простые расчетные процедуры в замкнутой форме.
Поэтому методы расчета цифрового фильтра, основанные на таких
аналоговых расчетных формулах, являются довольно простыми;
3) во многих приложениях представляет интерес использование
цифрового фильтра для моделирования работы аналогового
линейного с постоянными параметрами фильтра.
DSP
Анализ и проектирование цифровых фильтров
Рассмотрим передаточную функцию аналоговой системы
M
K a ( p)
d
k 0
N
c
k 0
k
pk
k
pk
Ya ( p)
,
X a ( p)
где xa(t) и ya(t) —соответственно входной и выходной сигналы, а Xa(p) и
Ya(p) —их преобразования Лапласа. Предполагается, что Ka(p) была
получена с помощью одного из установившихся методов аппроксимации,
используемых в расчетах аналогового фильтра. (Примеры рассмотрены
ниже.) Входной и выходной сигналы такой системы связаны между собой
с помощью интеграла свертки
y a (t )
x
a
( )ha (t )d
где ha(t) —импульсная характеристика, являющаяся обратным
преобразованием Лапласа от Ka(p). С другой стороны, аналоговая
система, имеющая передаточную функцию Ka(p), может быть описана
дифференциальным уравнением
d k y a (t ) M
d k xa (t )
ck
dk
k
dt
dt k
k 0
k 0
N
DSP
Анализ и проектирование цифровых фильтров
Соответствующая рациональная передаточная функция для цифровых
M
фильтров имеет вид
b( k ) z k
H ( z)
Y ( z)
X ( z)
k 0
N
a(k ) z
.
k
k 0
Входной и выходной сигналы связаны
между собой с помощью свертки
y ( n) x ( k ) h( n k )
k
или, что то же, с помощью разностного уравнения
N
M
k 0
k 0
a( k ) y( n k ) b( k )x( n k ).
DSP
При преобразовании аналоговой системы в цифровую мы должны поэтому
получить либо H(z), либо h(n) из расчета аналогового фильтра. При таких
преобразованиях, как правило, требуется, чтобы существенные свойства
аналоговой частотной характеристики сохранялись в частотной
характеристике получающегося в результате преобразования цифрового
фильтра. Под этим подразумевается, что необходимо мнимую ось из pплоскости отобразить в единичную окружность на z-плоскости. Второе
требование состоит в том, что устойчивый аналоговый фильтр должен быть
преобразован в устойчивый цифровой фильтр. Это означает, что если
аналоговая система имеет полюсы только в левой половине p-плоскости, то
цифровой фильтр должен иметь полюсы только внутри единичного круга.
Эти ограничения являются основными для всех методов, которые будут
рассмотрены ниже.
Анализ и проектирование цифровых фильтров
Метод инвариантности импульсной характеристики
Одна из процедур преобразования данных расчета аналогового
фильтра для расчета цифрового фильтра соответствует выбору в
качестве импульсной характеристики цифрового фильтра
равномерно распределенных отсчетов импульсной характеристики
аналогового фильтра. Иначе говоря, h(n)=ha(nT), где Т - период
дискретизации.
Частотная характеристика цифрового фильтра связана с частотной
характеристикой аналогового фильтра соотношением
1
2
H (e ) K a j n
T n T
T
j
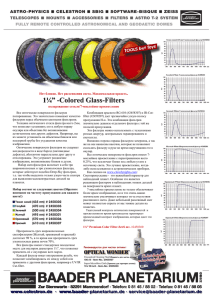
Очевидно, что если Ka(j) = 0, || /T, то H(ej) = (1/T)Ka(j /T),
|| . К сожалению, любой практический аналоговый фильтр не
будет обладать резко ограниченной полосой, и, следовательно,
имеет место явление наложения между соседними спектральными
полосами, как показано на рис.2.
DSP
Анализ и проектирование цифровых фильтров
Рисунок 2. Графическое представление эффектов наложения при расчете фильтра
методом инвариантности импульсной характеристики.
Чтобы исследовать интерпретацию метода расчета на основе импульсной
инвариантности с помощью соотношения между p- и z-плоскостями,
рассмотрим передаточную функцию аналогового фильтра, представленную
в виде разложения на простые дроби так, что
N
K p ( p)
k 1
Ak
p pk
Соответствующая импульсная характеристика имеет вид
N
ha (t ) Ak e pk t u (t ).
k 1
где и(t) - аналоговая единичная ступенчатая функция. Тогда импульсная
характеристика цифрового фильтра равна
N
DSP
h(n) ha (nT ) Ak e
k 1
N
p k nT
u (n) Ak (e pk T ) n u (n).
k 1
Анализ и проектирование цифровых фильтров
Передаточная функция цифрового фильтра Н(z) поэтому определяется
N
выражением
Ak
H ( z)
k 1
DSP
1 e pk T z 1
При сравнении Ka(p) и H(z) замечаем, что полюс в точке p = pk из
p T
p-плоскости преобразуется в полюс в точке e k на z-плоскости, а
коэффициенты в разложении на простые дроби Ka(p) и Н(z) равны. Если
аналоговый фильтр является устойчивым (соответственно чему
p T
действительная часть pk меньше нуля), то величина e k будет меньше
единицы, так что соответствующий полюс в цифровом фильтре находится
внутри единичного круга и, следовательно, цифровой фильтр является
также устойчивым. Заметим, что передаточная функция цифрового
фильтра Н(z) соответствует параллельной форме структуры, каждая из
ветвей которой в общем случае есть комплексный резонатор.
Несмотря на то, что полюсы p-плоскости отображаются в полюсы zp T
плоскости в соответствии с соотношением z k e k , важно отметить, что
процедура на основе инвариантности импульсной характеристики не
полностью соответствует отображению p-плоскости на z-плоскость
согласно такому или фактически любому другому соотношению. В
частности, нули цифровой передаточной функции являются функцией
полюсов и коэффициентов Ak в разложении на простые дроби, и они в
общем случае не будут отображаться таким же образом, как отображались
полюсы.
Анализ и проектирование цифровых фильтров
Пример.
В качестве примера определения цифрового фильтра из аналогового
фильтра на основе инвариантности импульсной характеристики
рассмотрим аналоговую передаточную функцию Ha(p), заданную в виде
K a ( p)
pa
1
1
1
.
( p a) 2 b 2 2 p a jb p a jb
Соответствующая передаточная функция цифрового фильтра, полученного
методом импульсной инвариантности, равна
1
1
1
1 (e aT cos bT ) z 1
H ( z)
aT jbT 1
aT jbT 1
aT jbT 1
aT jbT 1
2 1 e e z
1 e e z (1 e e z )(1 e e z )
1 (e aT cos bT ) z 1
.
1 2(e aT cos bT ) z 1 e 2 aT z 2
Цифровой фильтр, следовательно, имеет один нуль в начале координат и
нуль в точке z = e-aTcosbT.
DSP
Анализ и проектирование цифровых фильтров
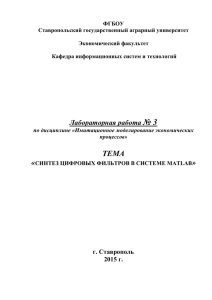
На рис.3 показано расположение полюсов и нулей для Ka(p) в p-плоскости
и для H(z) в z-плоскости совместно с аналоговой и цифровой частотными
характеристиками. В данном случае частотная характеристика аналоговой
системы спадает довольно медленно по отношению к частоте
дискретизации, и поэтому эффекты наложения в цифровой частотной
характеристике становятся очевидными.
р-плоскость
DSP
Рисунок 3. Расположение полюсов и нулей и частотная характеристика:
а) аналоговой системы второго порядка;
б) дискретной системы, полученной путем дискретизации импульсной характеристики
аналоговой системы.
Анализ и проектирование цифровых фильтров
Необходимо отметить, что когда аналоговый фильтр является «достаточно
ограниченным по полосе», то вышеприведенная процедура дает цифровой
фильтр, частотная характеристика которого имеет вид
H(еj ) (1/Т)Ka(j /T), || . Таким образом, при высоких частотах
дискретизации (малом Т) цифровой фильтр может иметь чрезвычайно
большое усиление. По этой причине в общем случае целесообразно
использовать выражение вида
N
TAk
.
pk T 1
1
e
z
k 1
H( z )
Это означает, что импульсной характеристикой является h(n) = Tha(nT).
Основой для метода импульсной инвариантности, как было указано
выше, является выбор импульсной характеристики для цифрового
фильтра, которая будет подобной в некотором смысле импульсной
характеристике аналогового фильтра. Использование этой процедуры
часто мотивируется не столько желанием сохранить форму импульсной
характеристики, сколько знанием того факта, что если аналоговый
фильтр является ограниченным по полосе частот, то частотная
характеристика цифрового фильтра будет точно аппроксимировать
аналоговую частотную характеристику.
DSP
Анализ и проектирование цифровых фильтров
Тем не менее в некоторых случаях расчета фильтров основной задачей может
оказаться создание некоторых свойств отклика, таких, как импульсная
характеристика или реакция на единичный скачок. В подобных случаях
естественный подход должен быть связан с расчетом цифрового фильтра на основе
импульсной инвариантности или процедуры инвариантности к скачку. В последнем
случае в качестве отклика цифрового фильтра на дискретизованную функцию
единичного скачка принимаются отсчеты отклика аналогового фильтра на
единичный скачок. Если аналоговый фильтр обладает хорошими параметрами
переходной характеристики, такими, как малое время нарастания и небольшой
выброс, то эти параметры должны быть сохранены в цифровом фильтре. Хотя в
процедуре расчета на основе импульсной инвариантности вводятся искажения в
частотную характеристику из-за эффекта наложения, соотношение между
аналоговыми и цифровыми частотами является линейным и, следовательно, за
исключением эффекта наложения, форма частотной характеристики сохраняется.
Это отличает изложенное от процедур, подлежащих дальнейшему рассмотрению, в
которых используются алгебраические преобразования. Необходимо еще отметить,
что методы импульсной инвариантности оказываются подходящими только в случае
фильтров, существенно ограниченных по полосе частот. Например, фильтры
верхних частот или режекторные фильтры потребовали бы дополнительного
ограничения полосы частот для того, чтобы избежать сильных искажений из-за
эффекта наложения.
DSP
Анализ и проектирование цифровых фильтров
Другая процедура дискретизации аналогового фильтра заключается в
замене производных в дифференциальном уравнении аналоговой системы
на конечные разности. Этот метод является стандартной процедурой при
численном анализе и при цифровом моделировании аналоговых систем.
Он основан на интуитивном представлении о том, что производная
аналоговой временной функции может аппроксимироваться разностью
между последовательными отсчетами ее, и по мере возрастания частоты
дискретизации отсчеты оказываются ближе друг к другу, точность
аппроксимации производной будет возрастать. Показано, что при таком
преобразовании характеристики аналогового фильтра не сохраняются, а
требуемые высокие частоты дискретизации приводят к весьма
неэффективному варианту цифрового фильтра, поэтому для
дискретизации аналоговых фильтров применяются иные методы.
Наибольшее распространение в практике синтеза БИХ-фильтров
стандартных типов, к которым относятся фильтры нижних частот (ФНЧ),
верхних частот (ФВЧ), полосно-пропускающие (ФПП) и полоснозаграждающие (ФПЗ) получил так называемый метод билинейного
преобразования.
DSP
Анализ и проектирование цифровых фильтров
Метод билинейного преобразования
Процедура, приводящая к билинейному преобразованию, основана на
интегрировании дифференциального уравнения и последующей численной
аппроксимации интеграла. Например, рассмотрим уравнение первого
порядка
c1 ya ' t c0 ya t d 0 xa t
(1)
для которого передаточная функция имеет вид
Κ
p
a
d
0
c pc
1
0
(2)
Представим y a t в виде интеграла от y a t , т.е.
t
y t y t dt y t .
a
a
a 0
t
0
В частности, при t nT и t n 1T имеем
0
nT
y nT
y t dt y
a
a
a
n 1T
DSP
n 1T .
Анализ и проектирование цифровых фильтров
Аппроксимируя интеграл формулой трапеции, можно записать
T
(3)
y nT y n 1T
y nT y n 1T .
a
a
a
2 a
c
d
0
nT
y nT 0 x nT ,
Подставляя в (3) ya
c a
c a
1
1
выраженное из (1), получим соотношение [замена y(n)=ya(nT), x(n)=xa(nT)]:
d
T c0
0
y n y n 1
y n y n 1
x n x n 1
(4)
2 c
c
1
1
Нахождение z-преобразования от (4) и его решение для Η z дает
Η z
Y z
X z
d
0
2 1 z -1
c
c
1 T
0
1
1 z
(5)
Сравнивая (5) и (2), заметим, что H z получается из K p заменой
a
1
2 1 z
p=
,
(6)
T 1 z -1
т.е.
Η z Κ
DSP
a
p
2 1 z -1
p=
T 1 z -1
.
(7)
Анализ и проектирование цифровых фильтров
Можно показать, что это справедливо и в общем случае, т.к.
дифференциальное уравнение n-го порядка можно записать как систему
n уравнений первого порядка вида (1). Из (6) следует, что
2 T +p
z=
2 T -p
(8)
Преобразование (7), использующее замену (6), называется билинейным.
Характер этого преобразования проще уяснить, если обратиться к рис.4,
где показано, каким образом p-плоскость отображается в z -плоскость.
Рисунок 4.
DSP
Анализ и проектирование цифровых фильтров
DSP
Видно, что мнимая ось из p-плоскости отображается в окружность
единичного радиуса на z-плоскости, левая полуплоскость отображается во
внутреннюю область единичного круга. Это можно увидеть и из (8).
2 T +jΩ
jω
z=
e
,
p=jΩ
При
следовательно, z = 1 .
2 T -jΩ
При =0,z=1ω=0 , и при Ω , z -1 ω π .
При p σ jΩ имеем
2
2
2
2
σ Ω
σ jΩ
T
z= T
,
z=
,
2
2
σ jΩ
2
2
T
σ Ω
T
и, следовательно, при σ 0 (для левой полуплоскости p) z 1 ,
т.е. точки располагаются внутри единичного круга в z - плоскости.
Поэтому устойчивый аналоговый фильтр преобразуется в
устойчивый цифровой фильтр.
Чтобы найти связь между частотами аналогового фильтра и
j p j
,
цифрового фильтра , положим z=e
, и получим
ω
ω
j
j
j
2
2 1 e
2 e 2 e
2 ω
jΩ
j tg .
ω
T 1 e j T j ω
T 2
j
2
e 2 e
Анализ и проектирование цифровых фильтров
Следовательно,
2 ω
(9)
tg ,
T 2
что означает существенно нелинейный характер связи аналоговых и
цифровых частот. Поэтому расчет цифровых фильтров на основе
билинейного преобразования оказывается полезным только тогда,
когда искажение шкалы частот и связанная с ним деформация АЧХ
могут быть скомпенсированы, т.е. когда для аппроксимации АЧХ
выбрана идеальная кусочно-постоянная характеристика. К таким
фильтрам относятся частотно-избирательные фильтры стандартных
типов: фильтр нижних частот (ФНЧ), фильтр верхних частот (ФВЧ),
фильтр полосно-пропускающий (ФПП), фильтр полосно-заграждающий
(ФПЗ).
Например, если необходимо рассчитать цифровой ФНЧ, то
отыскивается аппроксимация для идеальной АЧХ, представленной на
рис.5. Если рассчитан идеальный аналоговый ФНЧ, частота среза
Ω
2 ωc
которого равна Ω tg
, то в результате билинейного
c T
2
преобразования (7) получится требуемый идеальный цифровой ФНЧ
(рис.5).
DSP
Анализ и проектирование цифровых фильтров
Рисунок 5. Частотная характеристика идеального фильтра нижних частот.
DSP
Рисунок 6. Деформация шкалы частот при преобразовании аналогового фильтра
нижних частот в цифровой фильтр нижних частот
Анализ и проектирование цифровых фильтров
Конечно, реализовать идеальный фильтр этого типа невозможно ни в
аналоговом, ни в цифровом варианте. В общем случае мы
аппроксимировали бы подобную характеристику фильтра, допуская
некоторое отклонение от единицы в полосе пропускания и некоторое
отклонение от нуля в полосе непропускания с переходной полосой
ненулевой ширины. На рис.6. показаны отображение аналоговой АЧХ в
соответствующую цифровую АЧХ и допуски для их параметров.
Если частоты среза аналогового фильтра предварительно скорректированы
в соответствии с соотношениями:
ω
2 ωa
2
p
Ω tg
,
Ω tg
,
a
p T
T
2
2
где
p и a - частоты среза цифрового фильтра, то при преобразовании
(7) аналогового фильтра в цифровой, последний будет удовлетворять
заданным требованиям.
Типичными примерами частотно-избирательных аналоговых фильтров
являются фильтры Баттерворта, Чебышева и эллиптические (ЗолотареваКауэра).
DSP
Анализ и проектирование цифровых фильтров
Аналоговый фильтр Баттерворта обладает монотонной
характеристикой в полосах пропускания и непропускания.
Чебышевский фильтр имеет характеристику с равновеликими
пульсациями в полосе пропускания и монотонную в полосе
непропускания. Эллиптический фильтр имеет равновеликие
пульсации как в полосе пропускания, так и в полосе непропускания.
Очевидно, что эти свойства будут сохраняться, когда аналоговый
фильтр отображается в цифровой с помощью билинейного
преобразования. Это иллюстрируется частотными характеристиками
на рис.6. Заметим в заключение, что хотя билинейное преобразование
может быть эффективно использовано для отображения АЧХ из pплоскости на z-плоскость, деформация шкалы частот будет
проявляться в искажениях фазо-частотной характеристики фильтра.
При этом и импульсные характеристики аналогового и цифрового
фильтров будут различаться.
Прежде чем перейти к методике проектирования цифровых БИХфильтров, рассмотрим расчет аналоговых фильтров для некоторых
широко используемых видов аппроксимаций.
DSP
Анализ и проектирование цифровых фильтров
Обзор методов расчета аналоговых ФНЧ
Как показано выше, расчет цифровых БИХ-фильтров на основе аналогового
прототипа требует понимания методов расчета фильтров непрерывного
времени. Поэтому ниже мы приведем основные расчетные соотношения для
аналоговых ФНЧ, использующих аппроксимации Баттерворта, Чебышева
(типа 1 и 2) и эллиптическую (Золотарева-Кауэра).
1. Фильтры Баттерворта
Эти фильтры характеризуются тем, что их АЧХ являются максимально
плоской в полосе пропускания. Выражение для квадрата АЧХ фильтра
Баттерворта n-го порядка имеет вид:
2
1
(10)
Κ jΩ
,
a
1 Ω/Ω 2n
c
а при введении нормированной к частоте среза c частоты x / c
Κ
DSP
jx
a
2
1
1 x 2n
(11)
Анализ и проектирование цифровых фильтров
Ka(jx)
Ka(jx)2
1
1
0,5
а)
0.9
0.9
0.8
0.8
0.7
0.7
0.6
0.6
0.5
0.5
0.4
0.4
0.3
0.3
0.2
0.2
0.1
0.1
0
0
0
0.5
1
1
1.5
2
2.5
3
x
б) 0
0
0
n=2
n=4
n=8
0.5
1
1
1.5
2
2.5
3
x
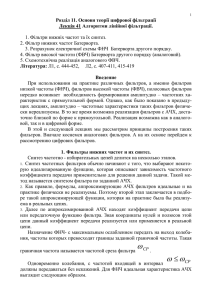
Рисунок 7.
На рис.7а представлен график квадрата АЧХ ( n=2), а рис.7б отображает
зависимость АЧХ фильтра Баттерворта от его порядка n. Аналитически
продолжая Κ jx на комплексную плоскость p , заменив в (11) jx p
a
x 2 1 p 2 , получим
2
1
(12)
K p
.
a
1 1n p 2n
Полюсы этой функции находятся из уравнения:
(13)
2
n
2
n
n
n
1
.
p 1 1 0, p 1
DSP
Анализ и проектирование цифровых фильтров
Поскольку
1 e j , 1
n 1
e
j n 1 j 2k
e
,
где k -любое целое число, то для k -го корня уравнения (13) получаем
соотношение
j n 1 2k / 2n
p e
,
(14)
k = 1,2,...,2n,
k
причем число корней равно 2n. Очевидно, что все полюсы pk находятся
на единичной окружности в p -плоскости, на одинаковом угловом
расстоянии друг от друга, поскольку модули pk равны 1, а аргументы
k
n 2k 1/ 2n 1 / 2 2k 1 / 2n.
На рис.8 представлены расположения полюсов для n = 3 и n = 4.
DSP
Рисунок 8.
Анализ и проектирование цифровых фильтров
Мы видим, что полюсы квадрата АЧХ образуют пары так, что для полюса
p pk имеется полюс p pk . Следовательно, для получения Κ p на
2
a
основе Κ p нужно выбрать по одному полюсу из каждой такой пары. Если
a
ограничить фильтр условиями устойчивости и физической реализуемости,
которые, как правило, требуются, то нужно выбрать полюсы левой
полуплоскости. Поэтому передаточную функцию фильтра можно
представить в виде
1
(15)
Κ p
,
a
n
p pk
k 1
j 1 / 2 2k 1 / 2n
p e
,
k
или в тригонометрической форме
где
k = 1,2,..., n.
2k 1
2k 1
p sin
jcos
,
k
2n
2n
k = 1,2,..., n.
Заметим также, что все полюсы в (15) образуют комплексносопряженные пары, кроме одного полюса на вещественной оси,
соответствующего k=(n+1)/2 при нечетном n.
DSP
Анализ и проектирование цифровых фильтров
Объединяя множители с комплексно-сопряженными полюсами в (15)
можно получить соотношение:
1
, n - четное,
n/ 2
p 2 2α p 1
k
k 1
Κ p
a
1
, n - нечетное,
n
1
/
2
p 1 p 2 2α p 1
k
k 1
где
α sin
k
(16)
2k 1
π .
2n
Из приведенных выше соотношений очевидно, что порядок фильтра n
полностью определяет весь фильтр. На практике порядок фильтра
рассчитывают, исходя из условия обеспечения определенного
1
ослабления
Α
Κ
на некоторой заданной частоте
DSP
a
jx3
x3 > 1 .
Анализ и проектирование цифровых фильтров
При исчислении ослабления в децибелах ( дб ) имеем
1/ 2
2
n
Α 20 lg 1 x
10 lg 1 x 2n
db
3
3
откуда
1 x 2n 100.1Α ,
3
x32 n 10 0.1 1
и, следовательно,
lg 100.1Α 1
Α
db .
n
2 lg x
20 lg x
3
3
(17)
Например, фильтр Баттерворта, обеспечивающий ослабление на
частоте xз =2 равное A=66дб, должен иметь порядок n66/20lg210,96 .
Следовательно, требуемые параметры обеспечит фильтр с n=11.
DSP
Анализ и проектирование цифровых фильтров
2. Фильтры Чебышева
DSP
Отличительной чертой фильтров Чебышева является наименьшая
величина максимальной ошибки аппроксимации характеристики идеального
ФНЧ в заданной полосе частот. В действительности ошибка аппроксимации
представляется в заданной полосе равновеликими пульсациями, т.е. она
изменяется между максимумами и минимумами равной величины. В
зависимости от того, минимизируется ошибка аппроксимации в полосе
пропускания или в полосе непропускания различают фильтры Чебышева
типа 1 (рис.9а) и типа 2 (рис.9б).
Фильтры Чебышева типа 1 имеют только полюсы и обеспечивают
равновеликие пульсации АЧХ в полосе пропускания и монотонное
изменение ослабления в полосе непропускания.
Квадрат АЧХ фильтра Чебышева типа 1 n -го порядка имеет вид:
2
1
Κ jx
,
(18)
a
2
2
1 ε T x
n
где x / p - частота, нормированная к частоте среза p , а T x n
полином Чебышева n -го порядка, по определению равный
cos n arccos x , x 1,
(19)
Tn ( x )
chn arch x , x 1,
- параметр, ограничивающий амплитуду пульсаций.
Анализ и проектирование цифровых фильтров
|Ka(j)|2
a
a
|Ka(j)|2
a
a
Рисунок 9. Общий вид квадрата АЧХ фильтров Чебышева типа 1 (а) и типа 2 (б).
Для полиномов Чебышева справедлива рекуррентная формула
x 2 xTm x Tm-1 x , T0 x 1, T1 x x.
T
m+1
DSP
(20)
Свойство оптимальности фильтров Чебышева типа 1 заключается в том,
что не существует какого-либо другого фильтра порядка n, содержащего
только полюсы, который имел бы такие же или лучшие характеристики и в
полосе пропускания, и полосе непропускания.
Анализ и проектирование цифровых фильтров
Определим передаточную функцию фильтра подстановкой в (18) x=p/j:
Κ
p
a
2
1
,
2
2
1 ε T p/j
n
с последующим нахождением полюсов из уравнения
1 ε 2T 2 p /j 0.
n k
Решение уравнения для полюсов в левой полуплоскости p имеет вид
2k 1
2k 1
p shΦ sin
π jchΦ cos
π ,
(21)
k
1 2n
1
2n
1
где Φ arsh1/ε , k = 1,2,..., n .
1 n
При этом передаточная функция примет вид:
Κ
p
a
Κ
0
n
p pk
k 1
(22)
где нормировочный коэффициент K0 определяется из условий Κ a 0
1 ε2
для четных n и Κ 0 1 для нечетных n : n
a
pk , n - нечетное,
k 1
Κ
0
n
1
pk , n - четное.
2
1 ε k 1
1
DSP
Анализ и проектирование цифровых фильтров
Заметим, что полюсы фильтра Чебышева типа 1 находятся через полюсы
фильтра Баттерворта того же порядка, если абсциссу каждого полюса
умножить на sh , а ординату на ch . При выполнении расчетов следует
1
1
пользоваться соотношениями
arsh x ln x x 2 1 ,
arch x ln x x 2 1 .
Фильтры Чебышева типа 2 (их еще называют инверсными фильтрами
Чебышева) обеспечивают монотонное изменение ослабления в полосе
пропускания и равновеликие пульсации в полосе непропускания. Квадрат
АЧХ такого фильтра n-го порядка представляется в виде
Κ
jx
a
2
1
1 ε 2 T x /T x /x 2
n a n a
,
(23)
где xa - граничная частота полосы непропускания (рис.9б). Фильтры
Чебышева типа 2 имеют и полюсы, и нули. Нули являются чисто мнимыми
и находятся в точках
x
a
p
j
, k 1,2,...n.
(24)
0k
2k 1
cos
π
2n
DSP
Анализ и проектирование цифровых фильтров
Полюсы левой полуплоскости p находятся по формулам
x α
x β
a
k
p σ jΩ , σ
, Ω a k ,
k
k
k
k
k
α2 β 2
α2 β 2
k
k
k
k
где
sh sin
k
2k 1
,
2n
k
ch cos
(25)
2k 1 Φ 1 archΑ, k=1,2,...,n,
Α
,
2n
n
1
K
a
xa
Передаточная функция такого фильтра может быть представлена в форме
n p p
0k ,
Κ p K0
a
k 1 p pk
где нормировочный множитель
n pk
Κ
0
k 1 p0k
определяется из условия Κ a 0 1.
DSP
(26)
.
Анализ и проектирование цифровых фильтров
Фильтры Чебышева полностью определяются любыми тремя из
следующих четырех параметров:
1). n - порядок фильтра;
2). - параметр, характеризующий пульсации;
3). x a - граничная частота полосы непропускания;
4). - параметр, характеризующий величину ослабления в полосе
непропускания.
Порядок фильтра, необходимый для обеспечения заданных
определяется формулой
lg g g 2 1
,
n
lg x x 2 1
a
a
DSP
g
Α2 1
.
2
ε
, , xa
(27)
Анализ и проектирование цифровых фильтров
Пример
Рассчитаем фильтр Чебышева минимального порядка, удовлетворяющий
следующим условиям:
-пульсации в полосе пропускания равны 2дб;
-переходное отношение 1/xa=0,781;
-ослабление в полосе непропускания 30дб.
Используя рис.9, найдем параметры фильтра , , xa по заданным
характеристикам
2дб 20 lg
1
1
2
, =0,764,
30дб 20 lg( 1 / A ), A=31,62,
xa=1/0,781=1,28.
Затем по (27) найдем g=41,33, и n=6,03.
DSP
Анализ и проектирование цифровых фильтров
3. Эллиптические фильтры (Золотарева-Кауэра)
Эти фильтры характеризуются тем, что их АЧХ имеет равновеликие
пульсации как в полосе пропускания, так и в полосе непропускания. Можно
показать, что с точки зрения минимальной ширины переходной полосы
эллиптические фильтры являются наилучшими, т.е. для заданных порядка
фильтра и уровня пульсаций не существует других фильтров с более
быстрым переходом от полосы пропускания к полосе непропускания.
Κ
jx
a
2
1
,
2
2
1 ε R x,x
n
a
где Rn2 x , x a - эллиптическая функция Якоби.
2
На рис.10 представлен типичный вид графиков функций Rn2 x , xa и a jx .
Передаточную функцию эллиптического фильтра можно представить
через его нули p0 k и полюсы pk в форме
n
a p 0
k 1
p p0 k
, k = 1,2,..., n,
p pk
либо после объединения комплексно-сопряженных нулей и полюсов в форме
DSP
n/2
p 2 a0 k
, n - четное,
K 0 2
k 1 p b1k p b0 k
a ( p)
( n 1) / 2
p 2 a0 k
K0
, n - нечетное.
2
p 0
k 1 p b1k p b0 k
(28)
Анализ и проектирование цифровых фильтров
Рисунок 10.
DSP
Обычно расчет параметров аналоговых фильтров рассмотренных
типов выполняют с использованием специальных справочников.
Расчеты рассмотренные выше, касались ФНЧ с нормированной
~ 1p / c
частотой среза ~ p . Обычно
. Существует много различных
p
способов преобразования такого фильтра в ФНЧ с другой частотой
среза p , в фильтр верхних частот, полосно-пропускающий и полоснозаграждающий фильтры.
Наиболее простые преобразования, связанные с деформацией шкалы
частот, получаются соответствующей заменой p=f(p). Основные
соотношения этих преобразований приведены в табл.1. Нелинейный
характер этих преобразований приводит лишь к изменению взаимного
расположения максимумов и минимумов пульсаций в преобразованной
АЧХ, но не влияет на амплитуду этих пульсаций.
Анализ и проектирование цифровых фильтров
Требуемое
преобразова
ние
Формула
замены
ФНЧ ФНЧ
p p
ФНЧ ФВЧ
p /p
ФНЧ ФПП
ФНЧ ФПЗ
2
p 1 p 0
p
p
p
2
p 02
Значения параметров
~ p / p
~ p p
02 p p
p p / ~ p
02 p p
p p / ~ p
1
1
2
2
2
2
~ p -частота среза нормированного ФНЧ
p , p -нижняя и верхняя граничные частоты среза требуемого фильтра
1
2
Таблица 1.
DSP
1
1
Анализ и проектирование цифровых фильтров
Расчет БИХ-фильтров стандартных типов методом
обобщенного билинейного преобразования
Фильтры стандартных типов включают четыре варианта форм их частотных
характеристик: фильтр нижних частот (ФНЧ), фильтр верхних частот (ФВЧ),
фильтр полосно-пропускающий (ФПП), фильтр полосно-заграждающий
(ФПЗ). Требования к ним, заданные в форме допусков на АЧХ,
представлены на рис.11.
Рисунок 11. Требования к АЧХ фильтров стандартных типов.
DSP
Анализ и проектирование цифровых фильтров
Итак, к фильтру соответствующего типа предъявляются требования на
максимальное значение неравномерности (пульсации) в полосе
пропускания 1 и на максимальное отклонение от нуля в полосе
задерживания 2. Часто задаются требования не к АЧХ, а к характеристике
затухания, выраженной в децибеллах:
1
j
A( ) 20 lg
20
lg
H
(
e
) (дб ).
j
H (e )
При этом задаются максимальное затухание в полосе пропускания
Ap 20 lg( 1 1 )(дб ) и минимальное затухание в полосе задерживания
Aa 20 lg 2 (дб ) . Задаются также граничные частоты полос пропускания
pi и задерживания ai и частота дискретизации д =2/T.
Порядок расчета цифрового фильтра может быть следующим.
1). Для граничных частот цифрового фильтраpi и ai определяются
соответствующие граничные частоты аналогового прототипа pi, ai по
формулам
Ω pi
DSP
2 ω pi
tg
,
T
2
Ωai
2 ωai
tg
.
T
2
Анализ и проектирование цифровых фильтров
2). Требования к АЧХ цифрового фильтра адресуются к АЧХ Ka(j)
аналогового прототипа в соответствующих полосах. По этим требованиям
выбирается аналоговый фильтр того или иного типа (Баттерворта,
Чебышева (типа 1 и 2) или эллиптический) и определяется его
передаточная функция Ka(p) как это было описано выше. Заметим, что
обычно этот расчет выполняется с помощью справочников. (Христиан Э.,
Эйзенман Е. Таблицы и графики по расчету фильтров (справочник). М.,
Связь, 1975.)
3). Рассчитывается передаточная функция цифрового фильтра
применением билинейного преобразования, т.е. в выражение Ka(p)
делается подстановка
2 1 z -1
p=
,
1
T 1 z
Η z Κ
a
p
2 1 z -1
p=
T 1 z -1
4). Рассчитываются коэффициенты, например, каскадной (или параллельной)
формы реализации передаточной функции
N 1 b z -1 b z -2
1i
2i
Η z Η
.
0
1
2
i 11 a1i z b2i z
DSP
Анализ и проектирование цифровых фильтров
Поскольку в справочной литературе приводятся, как правило, расчетные
сведения о передаточных функциях нормированных аналоговых ФНЧ (с
частотой среза ~ p 1 p/c), поэтому для получения передаточной
характеристики соответствующего аналогового прототипа, необходимо
использовать одно из преобразований (табл.1), а затем билинейное
преобразование (6), которое определит в конечном итоге передаточную
функцию требуемого цифрового фильтра. Этой процедуры двукратного
расчета аналогового фильтра можно избежать с учетом следующих
соображений.
1. Пусть мы проектируем цифровой ФНЧ с частотой среза p. Если
использовать билинейное преобразование в форме
1- z-1
p
1 z-1
где =const, то соотношение между аналоговыми и цифровыми
ω
частотами примет вид .Ω γtg .
2
Выберем константу так, чтобы частота среза p цифрового фильтра
получилась в результате билинейного преобразования аналогового ФНЧ с
частотой среза ,p тогда
ω
DSP
p
Ω tg
,
p
2
ω
p
γ Ω ctg
.
p
2
Анализ и проектирование цифровых фильтров
Таким образом, для преобразования нормированного аналогового ФНЧ
( p=1р/с) в цифровой ФНЧ с частотой среза p достаточно использовать
билинейное преобразование в форме
ω p 1 z -1
p ctg
.
2
1
1 z
(29)
При расчете аналогового ФНЧ граничная частота a полосы задерживания
определится по граничной частоте a цифрового фильтра соотношением
Ωa γtg
ωa
.
2
2. Для получения передаточной функции цифрового ФВЧ из нормированного
аналогового ФНЧ с учетом промежуточной замены p на p достаточно
единого преобразования вида
1 z -1
pγ
,
1
1 z
для которого связь аналоговых и цифровых частот примет вид Ω γctg
DSP
ω
.
2
Константу определим из условия преобразования граничной частоты Ω
p
аналогового ФНЧ в граничную частоту p цифрового ФВЧ:
ω
ω
p
p
Ω γctg
,
γ
Ω
tg
.
p
p
2
2
Анализ и проектирование цифровых фильтров
При p 1 p / c ,
γ tg
ω
p
,
2
поэтому такой нормированный аналоговый
ФНЧ преобразуется в цифровой ФВЧ с частотой среза p при
использовании одного преобразования
ω p 1 z -1
p tg
.
2
1
1 z
(30)
При расчете аналогового ФНЧ граничная частота a полосы
задерживания определится по граничной частоте a цифрового
фильтра соотношением
ω
Ωa γctg a .
2
3. Аналогичные рассуждения приводят к преобразованию
аналогового ФНЧ с частотой среза p в полосно-пропускающий
цифровой фильтр с граничными частотами среза p1 и p 2 при
использовании подстановки
z -2 2αz -1 1
pγ
,
2
1 z
DSP
(31)
для которой соотношение между аналоговыми и цифровыми
частотами имеет вид
α cos ω
(32)
Ωγ
.
sin ω
Анализ и проектирование цифровых фильтров
Константы и определяются из условий преобразования граничных
частот:
α cos ω
α cos ω
p2
p1
Ω
γ
,
Ω γ
,
p
sin ω
p
sin ω
p2
p1
из которых следует, что
cos (ω ω ) / 2
p1
p2
α
, γ Ω ctg (ω ω ) / 2.
p p 2
p1
cos (ω ω ) / 2
p 2
p1
(33)
При расчете аналогового ФНЧ граничная частота a полосы задерживания
определится по граничным частотам a1 и a2 цифрового фильтра
соотношением
a min( a , a ), где
1
11
Ωa γ
1
α cos ωa1
,
sin ωa1
Ωa γ
11
α cos ωa 2
.
sin ωa 2
4. Наконец, для получения полосно-заграждающего цифрового фильтра с
граничными частотами полос пропускания p1 и p 2из аналогового ФНЧ с
частотой среза p следует использовать преобразование
1 z -2
pγ
,
(34)
2
1
z 2αz 1
для которого соотношение частот имеет вид
Ωγ
DSP
sin ω
.
cos ω-α
(35)
Анализ и проектирование цифровых фильтров
Константы и
находятся из условий
sin ω
sin ω
p1
p2
Ω γ
,
Ω γ
p
p
cos ω -α
cos ω -α
p1
p2
откуда следуют соотношения
cos (ω ω ) / 2
p1
p2
α
, γ Ω tg (ω ω ) / 2,
p p 2
p1
cos (ω ω ) / 2
p 2
p1
(36)
При расчете аналогового ФНЧ граничная частота a полосы задерживания
определится по граничным частотам a1 и a2 цифрового фильтра
соотношением
sin ωa 2
1
11
sin ωa1
11
.
a min( a , a ), где Ωa1 γ
, Ωa γ
cos ωa 2 α
cos ωa1 α
Соотношения (29)-(36), полученные выше, сведены в табл.2.
DSP
Анализ и проектирование цифровых фильтров
Требуемый
цифровой
фильтр
Граничные
цифровые
частоты
Формула
замены р на
ФНЧ
1 z -1
1 z -1
p
ФВЧ
p
γ
ФПП
p , p
1
2
γ
ФПЗ
p , p
1
DSP
γ
2
1 z -1
1 z -1
z -2 2αz -1 1
1 z -2
1 z -2
z -2 2αz -1 1
Таблица 2.
Значения параметров
ω
p
γ Ω ctg
p
2
ω
p
γ Ω tg
p
2
γ Ω ctg (ω
ω ) / 2
p p 2
p1
cos (ω ω ) / 2
p1
p2
α
cos (ω ω ) / 2
p 2
p1
γ Ω tg (ω
ω ) / 2
p p2
p1
cos (ω ω ) / 2
p1
p2
α
cos (ω ω ) / 2
p 2
p1
Анализ и проектирование цифровых фильтров
Примеры расчета фильтров на основе билинейного
преобразования
Рассмотрим примеры расчета цифровых фильтров на основе билинейного
преобразования аналогового нормированного ФНЧ, для которого
использовались различные аппроксимации, включая аппроксимации
Баттерворта, Чебышева и эллиптическую. При одних и тех же требованиях к
фильтру нижних частот для каждого метода аппроксимации приведем
расчетные соотношения для коэффициентов передаточной функции
фильтра, выражение для передаточной функции, графики АЧХ и
характеристики затухания.
1). Аппроксимация Баттерворта. Параметры рассчитанного фильтра
шестого порядка:
Передаточная функция фильтра:
0,0005797 (1 2 z 1 z 2 ) (1 2 z 1 z 2 )(1 2 z 1 z 2 )
H ( z)
(1 1,3143z 1 0,7149 z 2 ) 1 1,0541z 1 0,3753z 2 (1 0,9459 z 1 0,2342 z 2 )
DSP
Анализ и проектирование цифровых фильтров
Рисунок 12а. АЧХ цифрового ФНЧ
(аппроксимация Баттерворта).
DSP
Рисунок 12б. Характеристика
затухания цифрового ФНЧ
(аппроксимация Баттерворта).
Анализ и проектирование цифровых фильтров
2). Аппроксимация Чебышева. Параметры рассчитанного фильтра
четвертого порядка:
Передаточная функция фильтра:
0,001836 (1 2 z 1 z 2 ) (1 2 z 1 z 2 )
H ( z)
(1 1,4946 z 1 0,8482 z 2 ) 1 1,5548 z 1 0,6493z 2
DSP
Анализ и проектирование цифровых фильтров
Рисунок 13а. АЧХ цифрового ФНЧ
(аппроксимация Чебышева).
DSP
Рисунок 13б. Характеристика
затухания цифрового ФНЧ
(аппроксимация Чебышева).
Анализ и проектирование цифровых фильтров
3). Аппроксимация эллиптическая. Параметры рассчитанного
фильтра третьего порядка:
Передаточная функция фильтра:
0,05635 (1 1,0166 z 1 z 2 ) (1 z 1 )
H ( z)
(1 1,4461z 1 0,7956 z 2 ) 1 0,6829 z 1
DSP
Анализ и проектирование цифровых фильтров
Рисунок 14а. АЧХ цифрового ФНЧ
(аппроксимация эллиптическая).
DSP
Рисунок 14б. Характеристика
затухания цифрового ФНЧ
(аппроксимация эллиптическая).
Анализ и проектирование цифровых фильтров
Приведем результаты расчета цифрового фильтра верхних частот на
основе билинейного преобразования аналогового нормированного ФНЧ,
для которого использовалась аппроксимация Чебышева типа 1.
Параметры рассчитанного фильтра четвертого порядка:
Передаточная функция фильтра:
0,02426(1 2 z 1 z 2 )(1 2 z 1 z 2 )
H ( z)
(1 0,5561z 1 0,7647 z 2 ) 1 1,0416 z 1 0,4019 z 2
DSP
Анализ и проектирование цифровых фильтров
Рисунок 15а. АЧХ цифрового ФВЧ
(аппроксимация Чебышева).
DSP
Рисунок 15б. Характеристика
затухания цифрового ФВЧ
(аппроксимация Чебышева).
Анализ и проектирование цифровых фильтров
Машинное проектирование цифровых БИХ-фильтров
В общем случае не существует аналитических процедур для расчета
аналоговых или цифровых фильтров, удовлетворяющих требованиям
произвольной частотной характеристики или другим типам требований. В
этих случаях применяются методы оптимизации, которые основаны на
использовании ЦВМ для решения систем линейных или нелинейных
уравнений для коэффициентов фильтра.
Рассмотрим одну из процедур машинного расчета цифровых БИХ-фильтров,
предложенную Штейглицем и основанную на минимизации
среднеквадратической ошибки в частотной области. При этой процедуре
необходимо, чтобы требуемая частотная характеристика H d (e j ) была
определена для дискретного ряда частот {j}, j=1,2,…,M в диапазоне 0.
Среднеквадратическая ошибка на этих частотах определяется как
M
H e .
E H e
j 1
j j
j j
2
d
Предполагается, что передаточная функция фильтра имеет вид
1 ak z 1 bk z 2
H ( z ) A
,
1
2
1
c
z
d
z
k 1
k
k
K
соответствующий каскадной форме, поскольку она менее чувствительна к
точности коэффициентов и для удобства в расчете производных,
необходимых в процедуре оптимизации.
DSP
Анализ и проектирование цифровых фильтров
Обозначим символом = {ak, bk, ck, dk} } совокупность 4K неизвестных
j
j
коэффициентов, H j H (e j ) / A, H dj H d (e ) и представим ошибку в виде:
j
M
E ( , A) AH j H dj .
j 1
2
Поскольку необходимо найти значения этих параметров, минимизирующих
ошибку E, то нужно взять частные производные от E по каждому
параметру и A и приравнять эти производные к нулю. Таким образом,
получается (4K+1) уравнений с (4K+1) неизвестными. Уравнение для A
оказывается особенно простым, поскольку
M
E M
2[ A* H j H dj ] H j 0, A*
A j 1
H
j 1
M
j
H dj
Hj
2
j 1
Оптимальные значения *, минимизирующие ошибку E, найдутся из
решения системы нелинейных уравнений:
M
Hj
E ( , A )
2 A [ A H j H dj ]
0, k 1,2,...,4 K ,
k
k
k 1
где k – k-я компонента , соответствующая либо ak, либо bk, либо ck, либо dk.
DSP
Анализ и проектирование цифровых фильтров
Эти уравнения можно решить с помощью методов оптимизации,
используя, например, алгоритм Флетчера-Пауэла. Отметим, что
при этой процедуре учитывается только амплитудная
характеристика. Алгоритм оптимизации может в итоге дать
значения параметров, соответствующих неустойчивому фильтру,
т.е. полюсы и нули каждого блока второго порядка окажутся за
пределами единичного круга. Кроме ограничений на расположение
нулей и полюсов, Штейглиц проверял корни каждого множителя
второго порядка после завершения процедуры минимизации, и,
если полюс (или нуль) оказывался вне единичного круга, он
заменял его на зеркальное отображение, оставляя таким образом
амплитудно-частотную характеристику неизменной. Например,
при наличии действительного полюса z=p1, он заменяется на
полюс z=1/p1 , что эквивалентно умножению передаточной
(,z который
p1 ) /( z при
1/ p1z=1
)
функции на множитель
имеет
постоянную величину равную p1. Это означает, что такая
трансформация полюса не изменяет формы АЧХ. Штейглиц
нашел, что продолжение процедуры оптимизации иногда приводит
к дальнейшему уменьшению ошибки.
DSP
Анализ и проектирование цифровых фильтров
Ниже приведены результаты расчетов на основе рассмотренной
процедуры, когда идеальный фильтр нижних частот определялся
частотой среза равной 0.1, а число каскадов второго порядка
изменялось от K=1 до K=3. На рис.16 – 18 представлены графики
АЧХ рассчитанных цифровых ФНЧ.
1. Число каскадов K=1. Параметры рассчитанного фильтра:
Передаточная функция фильтра:
0.07821(1 0.2186 z 1 0.9982 z 2 )
H ( z)
.
1
2
(1 1.5482 z 0.7072 z )
DSP
Анализ и проектирование цифровых фильтров
Рисунок 16. АЧХ однокаскадного фильтра.
DSP
Анализ и проектирование цифровых фильтров
2. Число каскадов K= 2. Параметры рассчитанного фильтра:
Передаточная функция фильтра:
0.02527(1 1.4297 z 1 0.9999 z 2 )(1 0.4065 z 1 0.9849 z 2 )
H ( z)
(1 1.5952 z 1 0.8941z 2 )(1 1.4825 z 1 0.6007 z 2 )
DSP
Рисунок 17. АЧХ двухкаскадного
фильтра.
Анализ и проектирование цифровых фильтров
3. Число каскадов K= 3. Параметры рассчитанного фильтра:
Передаточная функция фильтра:
0.008432(1 0.7367 z 1 0.9891z 2 )(1 1.4049 z 1 0.9918 z 2 )(1 1.402 z 1 0.9932 z 2 )
H ( z)
(1 1.5239 z 1 0.7426 z 2 )(1 1.6201z 1 0.9347 z 2 )(1 1.3963z 1 0.5123z 2 )
DSP
Рисунок 18. АЧХ трехкаскадного
фильтра.