Функции АСУ ТП Функции АСУ ТП - "Web
реклама

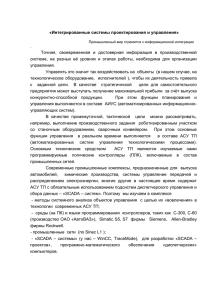
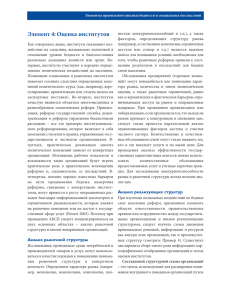
Функции АСУ ТП Функции АСУ ТП Основные функции, реализуемые средствами АСУ ТП, следующие: Автоматическое регулирование (АР); Логическое управление (ЛУ); Контроль и отображение (КО); Противоаварийная защита (ПАЗ); Диагностика и прогнозирование (ДиП); Коммуникация (Ком). Функции АСУ ТП Функции АСУ ТП АР (автоматическое регулирование) – функция, которая предназначена для поддержания непрерывных значений технологических параметров на заданном уровне или их изменение по заданному закону с соблюдением предъявляемых требований к качеству переходного процесса. Особенности: чаще всего работает с аналоговыми сигналами; всегда задаются жесткие требования по выполнению этой функции, связанные с периодом дискретизации сигнала. Функции АСУ ТП ЛУ (логическое управление) – одна из наиболее распространенных функций, при помощи которой, на основе дискретных и аналоговых сигналов, получаемых от процессов, на основе выполнения логических функций различной степени сложности, формируется дискретный сигнал управления двумя состояниями «Вкл/Выкл», которые используются для запуска и остановки ТП и отдельных агрегатов, изменения режимов работы и контроля за разрешением выполнения других функций. Функции АСУ ТП КО (контроль и отображение) – чисто информационная функция, предназначенная для сбора информации, обработки ее различными способами, фильтрации, сглаживания, статического анализа и преобразования с целью предоставления информации в форме, удобной для наблюдения человеком-оператором. Основные устройства – ввода/вывода начиная от простейших: сигнализаторы; цифровые индикаторы; стрелочные приборы; самописцы; мнемонические табло-схемы; принтеры; операционные панели; дисплеи. Функции АСУ ТП ПАЗ (противоаварийная защита) – предотвращает в системе аварийные ситуации, приводящие к необратимым последствиям. Например, поломка отдельных частей ТА, разрушение ТА или выброс вредных веществ. Особенности: функция работает в режиме КО, не производя действий. При возникновении аварийных ситуаций: должны быть исключены ее сбои; реакция ПАЗ должна быть выше реакции основной системы, например, при выполнении логических функций. ПАЗ работает на основе прерываний, имеющих повышенный приоритет по отношению к другим функциям управления. Функции АСУ ТП ДП (диагностика и прогнозирование) включает 1) ДП состояния ТП – функция, оценивающая граничные значения технологических параметров, скорость изменения с целью выявления износа отдельных частей ТП, влияющих не только на работоспособность, но и на производительность, экономичность и т.п. 2) Самодиагностика – функция ориентирована на установление работоспособности отдельных аппаратных составляющих системы и правильности выполнения основных функций. Функции АСУ ТП КС (коммуникация и связь) – функция для осуществления обмена данными устройства управления (контроллера, ЦПУ): а) с внешними периферийными устройствами б) с верхним уровнем АСУ ТП по локальной (глобальной) сети в состав которой входит устройство управления. Рассмотрим перечисленные функции более подробно. Автоматическое регулирование Автоматическое регулирование В зависимости от того, какие задачи ставятся для поддержания выходного сигнала y, системы АР делятся на: системы стабилизации (у=const); системы программного управления: изменение выходной величины объекта в соответствии с заданной функцией y=f(V,t), где функция f определена заранее; следящие системы: x(t)=V(t); системы оптимального управления: наряду с управлением обеспечивается выполнение дополнительных требований к качеству процессов (время переходного процесса, перерегулирование, установившаяся ошибка); Автоматическое регулирование системы адаптивного управления: ý=f(y,t,V), модели ОУ плохо определены, нелинейные, нестационарные. Этапы разработки системы: Построение модели ОУ – идентификация; Вычисление управляющего воздействия. Современные САР, как правило, цифровые, следовательно требуется аналогово-цифровые (АЦП) и цифро-аналоговые (ЦАП) преобразователи. Автоматическое регулирование Автоматическое регулирование Здесь Vк, Uк, yк – дискретные сигналы. V(t), U(t), y(t) –непрерывные. Основной задачей при реализации функции управления является преобразование каждого параметра из аналоговой величины в цифровую, и наоборот. Одной из задач цифровых регуляторов (ЦР) является строгое соблюдение временных интервалов. Рассмотрим варианты реализации ЦР. Автоматическое регулирование Автоматическое регулирование Автономные ЦР – это специальные устройства, имеющие в своем составе полный набор программных и аппаратных средств для реализации управления: АЦП, ЦАП, память, процессорное устройство, операционная система, внешняя память, органы управления изменением параметров (настройка регулятора), источник питания, интерфейс связи, наличие индексирования. Недостатки: высокая стоимость, ограничение возможности коммуникации. Достоинства: надежность, быстродействие, неограниченное число контуров управления. Автоматическое регулирование Встраиваемые ЦР – регуляторы, которые имеют в своем составе полный набор средств для выполнения функции регулирования, но конструктивно предназначены для установки и работы в составе устройства управления, решающего всю задачу автоматизации. Пример: семейство контроллеров Simatic S7. Автоматическое регулирование Здесь PS (Power Supply) – источник питания, CPU – центральный процессор, IP (Intellectual Peripherals) – интеллектуальная периферия. Модули, которые устанавливаются в состав контроллера, имеют возможность обработки нескольких контуров регулирования, число которых может изменяться в диапазоне от 3 до 12. Достоинства: гибкость за счет изменения параметров со стороны CPU; меньшая стоимость, высокая коммуникативность, высокое быстродействие. Недостатки: ограничение по контурам управления (мало посадочных мест), контроль и отображение ведется с помощью контроллера. Автоматическое регулирование Программные ЦР регуляторы, функция регулирования которых выполняется при помощи программы, находящейся в CPU, а для ввода и вывода сигналов используются соответствующие периферийные модули аналогового ввода (Analog Input, AI) и вывода (Analog Output, AO). Автоматическое регулирование Достоинства: гибкость (за счет изменения программы), самый дешевый способ регулирования (затраты – только на разработку программы). Недостатки: программа регулирования существенно нагружает CPU (по памяти и по времени), невысокая надежность (при выходе из строя CPU регулирования нет!). Модульное регулирование – это способ, при котором функция регулирования (весь набор вычислений) реализуется с помощью стандартных программных модулей, выполняющих элементарные математические действия: вычитание (определение разницы между уставкой и регулируемой величиной), сложение (сигналов), умножение, интергированин, дифференцирование. Автоматическое регулирование Достоинства: позволяет функции реализовать регулирования, нестандартные гибкость. Недостатки: см. программные ЦР. Структурные регуляторы – это регуляторы, в основе которых используется ПИД-алгоритм, но с дополнительными звеньями, позволяющими производить обработку сигналов перед входом регулятора и после его выхода. Обработку входного сигнала можно представить с помощью цепочки: Автоматическое регулирование КД – контроль достоверности. Используется для устранения влияния импульсных помех. Правило обработки сигнала: Если ( xК xК ) то за результат принимается xК Если ( xК xК ) то за результат принимается xК 1 Здесь x К N N x i 1 i среднее значение. Автоматическое регулирование СГ – функция сглаживания. Позволят устранить нежелательные высокочастотные измеренном сигнале. Реализуется низкочастотного фильтра: сигналы в с помощью 1 W ( p) TФ p 1 КН – компенсирующая нелинейность. Используется для устранения нелинейностей. Выявляется нелинейность, реализуется антинелинейный сигнал. В итоге после суммирования нелинейного сигнала с антинелинейным получается результат. Автоматическое регулирование ГЗ – граничные значения. Если уровень сигнала выходит за рамки установленного диапазона, то выдается «предупредительный сигнал». Если сигнал после этого продолжает расти и превышает аварийно-допустимый уровень, то выдается «аварийный сигнал». Далее следует ПИД-регулятор, он выполняет регулирование процессов в системе в соответствии с заданными требованиями качества переходных процессов и задач управления. Выходные сигналы формируются с помощью КНФ – квазинепрерывного формирователя (экстраполяторы 0 и 1 порядков и интегратор 1-го порядка), ШИМ – широтно-импульсного модулятора, ИП – импульсного преобразователя. Логическое управление Наибольший объем выполняемых задач и обрабатываемых переменных приходится, как правило, на функции логического управления. ЛУ делится на жесткое и гибкое. Жесткое управление – это управление с помощью специализированных средств (реле, транзисторы, ИМС, ПЛМ). Структура и, следовательно, набор и вид выполняемых функций задается на этапе проектирования и определяется конструкцией (релейная автоматика, транзисторная логика, интегральные микросхемы, программируемые логические матрицы, специализированное микропроцессорное устройство). Но такие элементы стали неудобны. Логическое управление Гибкое управление реализуется средствами ПЛК (программируемых логических контроллеров), устройств модульного типа, в состав которого кроме источника питания и CPU можно включать разнообразный набор периферийных модулей для ввода и вывода дискретных сигналов. Они реализуют большое количество режимов прерываний. Иначе ПЛК называют масштабируемыми устройствами управления. Пример масштабируемости: Siemens Simatic S7200, S7-300, S7-400. Аналогичные линейки есть у Analog Devices, Schneider, Omron, Allen Bradley. Логическое управление ПЛК имеет в своем составе CPU с операционной системой реального времени, приспособленной решать задачи в режимах, требуемых именно для управления, а также модули дискретного ввода/вывода (DI/DO). Логическое управление Например, для выполнения логического управления требуется циклический режим обработки программ. Помимо циклического, предусмотрены различные режимы прерываний (по времени, аварийные, др.). Логическое управление В ПЛК наличествуют специализированные языки программирования, ориентированные на наиболее удобное восприятие специалистами. Виды логических алгоритмов: 1. Временнόе управление (потактовое, циклическое) – это функция, в которой последовательность управления исполнительными органами задается при помощи временных соотношений и чаще всего изображается в виде диаграммы. Для него характерно отсутствие входных сигналов. Логическое управление 2. Пошаговое управление – процесс воздействия на объект разделяется на определенную последовательность выполняемых действий (существует сценарий). Переход от одного действия к другому происходит по условиям, формируемым логическими функциями входных сигналов, а иногда и временными соотношениями. 3. Блокированное управление – для каждого исполнительного устройства записываются (программируются) логические условия, разрешающие включение или выключение с учетом состояния органов управления, стадий и состояния ТП, положения и состояния др. исполнительных органов. Логическое управление 4. Селективное управление – управление на множестве состояний. 5. Аналого-дискретное управление. Управление осуществляется аналоговыми сигналами. Используется для управления по граничным значениям. Контроль и отображение Функции контроля и отображения применяются для создания человеко-машинных интерфейсов (HMI), устройств, передающих и отображающих информацию. Различают локальный и центральный КО. Локальный контроль – для выполнения всех предписанных задач, но в непосредственной близости от технологического объекта, при этом ТО должен быть в зоне видимости. Такое управление реализовывается при помощи специализированных устройств: текстовые панели, графические панели, панели операторов. Контроль и отображение Контроль и отображение Панели оператора – устройства, содержащие либо текстовый (чаще) или графический дисплей, 2 поля с кнопками – набор стандартный кнопок для управления панелью, работы с меню и переключения режимов. Второе поле – функциональные клавиши, снабжены световыми индикаторами и используются для подачи команд оператора в систему. Контроль и отображение Подключение операторской панели: Контроль и отображение Операционная панель может считывать из CPU значения заданных переменных из области входов, выходов, маркеров и счетчиков, может записывать значения своих переменных либо от клавиш управления F1-F16, либо от числовых значений параметров в той же области контроля. Можно запрограммировать: 1. вывод рабочих сообщений (текст, значение параметра, время); 2. вывод сообщений о неполадках (вызываются по инициативе процесса); 3. вывод рецептов – совокупности технологических параметров, связанных с обслуживанием определенного режима или с выпуском вида продукции; Контроль и отображение 4. вывод образов – групп значений отображаемых параметров, связанных с определенным объектом или режимом работы ТП; 5. ввод команд, формируемых по нажатию F1-F16. Состоят из адреса переменной и ее значения, помещаемых в буфер обмена, откуда считываются в CPU. Могут группироваться в наборы в зависимости от режима работы, с подсказкой. Контроль и отображение Централизованный контроль реализуется на втором уровне АСУТП, предназначен для связи операторов-технологов, находящихся в удаленном диспетчерском пункте, со всеми частями управляемого ТП. Осуществляется при помощи станций оператора для организации функционирования которых используются SCADA-пакеты, взаимодействующие с сервером. Контроль и отображение Контроль и отображение SCADA-пакет – совокупность средств, позволяющих наглядно отображать состояние ТП в виде набора экранных изображений, на которые выводятся статические картинки мнемонического отображения ТП или его части с наложением динамических элементов, показывающих состояние исполнительных органов путем изменения внешнего вида, цвета, значения параметров в цифровой либо аналоговой форме и наложением динамических окон, при помощи которых можно изменять значения параметров или подавать команды управления. Контроль и отображение Кроме этого система обеспечивает вывод сообщений, автоматически связанных с изменением режимов работы отдельных частей ТП или возникновением аварийных либо внештатных ситуаций. Все принимаемые со стороны ТП значения и сообщения накапливаются в архивах для последующего воспроизведения истории развития процесса или формирования протоколов (отчетов). Наиболее известные SCADA-пакеты: In Touch (USA), Genesis (USA), Real Flex (USA), WinCC (Germany) -> Simatic S7 -> 40% рынка, Trace Mode (RU), Круг 2000 (RU), OpenSCADA (RU). Контроль и отображение SCADA-пакет – пакет программ, который позволяет проектировать и сопровождать процесс выполнения системы КиО (системы диспетчеризации), включая основные следующие задачи: 1. обмен данными с устройствами низкого уровня, между станциями; 2. Накопление, архивирование данных при помощи универсальных БД или пользовательских БД, при этом используется выделенный сервер; 3. Отображение информации в виде графических мнемосхем технологического процесса с наложением числовых, световых значений параметров или их отображений в отдельных окнах в виде таблиц, графиков, диаграмм; Контроль и отображение 4. Вывод сообщений о событиях в системе, в объекте, сопровождаемой отметкой времени, текстовыми сообщениями и информацией о параметрах – рабочих и аварийных; 5. Формирование отчетов – документирование и вывод различных видов протоколов; 6. Внедрение собственных программ пользователя и вызов системных функций. SCADA-пакет состоит из проектирующей части и исполнительной части. Их можно приобретать по отдельности. Например, на 10 рабочих станций достаточно одной проектирующей части, но исполнительная часть (RunTime) у каждой станции должен быть своя. Контроль и отображение Контроль и отображение Проектирующая часть (набор редакторов, которые позволяют создавать все составляющие системы отображения) содержит: редактор связей – формирует список переменных с указанием устройств, с которых эти данные должны считываться, драйвера, адреса переменных (имя и адрес переменной в этом устройстве) и цикла актуализации (время опроса); редактор архивов – для хранения переменные; редактор сообщений – для формирования текста, в котором могут выставляться значения параметров, и условий его отображения; Контроль и отображение графический редактор – часть системы, при помощи которой создаются все графические образы (отдельные динамические элементы, клавиши, кнопки). Позволяет разбивать всю совокупность изображений на отдельные экранные образы (могут иметь структуру – дерево); редактор сценариев – редактор программ (на языках С, Visual Basic), описывающих поведение системы при возникновении различных событий, в том числе срабатываний таймеров; редактор протоколов (отчетов) – для подготовки печатных документов, которые сопровождают работу системы. Противоаварийная защита Предназначена для наблюдения за граничными значениями параметров ТП. Вырабатывает предупредительные сигналы и переводит исполнительные устройства ТП в состояние, предотвращающее возможность возникновения аварийной ситуации. Основное состояние: непрерывный контроль. Реализована отдельно от устройства управления. Задачи ПАЗ. 1.Контроль за ПДЗ (предельно допустимыми значениями). Измерение аналоговых параметров и сравнение их с граничными. 2. Оценка скорости изменения параметров. Противоаварийная защита 3. Аварийная блокировка исполнительных органов. Для принятия решения о блокировке ПАЗ должна производить логический анализ ситуации. Требования: 1. Надёжность системы ПАЗ. Выпускают на аппаратных средствах, отличающихся от остальных систем управления. Технические средства должны быть сертифицированы и иметь разрешение контролирующих органов на применение. 2. ПАЗ – дублированная система. Категории дублирования H,F. Н – конфигурация, в которой активным является одно из дублирующих устройств, а второе используется как резервное в случае неисправности первого. Противоаварийная защита В случае ошибок управление передается пассивной системе. F - оба устройства являются активными и производят сравнение результатов выполнения команд и на основе некоторых критериев, заложенных в контроллер, разрешение выдаётся одному из устройств. Если отклонения повторяются, то система выдаёт сигнал о сбое (сбой выявляется быстрее чем в H). Рассмотрим варианты реализации: Противоаварийная защита а) дублирование CPU c объединённой периферией. Противоаварийная защита б) конфигурация с раздельной периферией. Сигнал вводится в контроллер четырьмя независимыми наборами устройств. К – коммутатор. Противоаварийная защита в) дублирование на уровне исполнительных механизмов. датчиков и Противоаварийная защита Обычно применяется комбинированное дублирование. Так же есть троированые системы ПАЗ (сверх надёжные). 3. Быстродействие обеспечивается за счёт использования режимов прерывания (аппаратных или аварийных), которые имеют высший приоритет по отношению к другим перифериям, использованным в системе. При возникновении прерываний сигнлы вводятся/выводятся путём непосредственного обращения к периферийным модулям, минуя область отображения. Диагностика и прогнозирование Функция предназначена для оценки отдельных органов технологического процесса, соединительных линий, контроль прохождения команд управления, а также самодиагностики или самотестирования, определения работоспособности элементов самой системы управления. В результате выполнения функции диагностики, выявляются выходы за границы контролируемого параметра, вырабатывается сигнал, посылается сообщение или вызывается автоматическая процедура замены поврежденного органа. Может сочетаться с пожарной сигнализацией, охранной системой. Диагностика и прогнозирование Самодиагностика – набор средств, определяющих работоспособность самой системы управления как на аппаратном так и на программном уровнях. На аппаратном уровне существуют периферийные модули, которые определяют ситуацию обрыва провода. Все остальные сбои определяются автоматически операционной системой (например если не отвечает периферийный модуль). В результате возникновения программных или аппаратных ошибок инициируется вызов специальных организационных блоков. Диагностика и прогнозирование С их помощью пользователь может запрограммировать реакцию на возникновение той или иной ошибки. Прогнозирование – позволяет предсказывать состояние или развитие ситуации для своевременного исключения нежелательных процессов. Функции самодиагностики присутствуют во всех современных исполнительных устройствах технологических процессов. Проверяют работу процессоров, периферийных модулей, связи, памяти, источников питания при включении. Диагностика и прогнозирование Пример - контроль управления двигателем (оценка скорости вращения и температуры подшипников): Коммуникация Это функция, которая предназначена для обеспечения связи управляющих устройств с системами отображения, периферийными устройствами и другими устройствами управления данного или вышестоящего уровня управления. Различают коммуникацию: локальную, удаленную, сетевую. Локальная коммуникация – набор программных и аппаратных средств, позволяющих подключать к устройству управления другие устройства, расположенные в непосредственной близости при небольшом удалении. связь с устройствами и приборами, находящимися в непосредственной близости к устройству управления. Коммуникация Пример – подключение программатора и операторской панели к ПЛК. Если возможностей CPU не хватает, то используют коммуникационный процессор (CP) – устройство, специализированное на выполнение функций обмена информацией. CP программируется самостоятельно, независимо от CPU. Обмен между ними происходит по внутренней шине контроллера через двухпортовую память. Особенность: небольшой набор устройств, небольшая удаленность 2-3м, соединение: «точкаточка», простейшие интерфейсы связи (например, RS-232), невысокая стоимость (только кабель), невысокая скорость передачи данных. Коммуникация Удаленная коммуникация – связь, обеспечивающая обмен данными между центральными устройствами управления и периферийными устройствами на расстоянии до десятков метров. Применяемые интерфейсы связи: TTY (токовая петля), RS485. Недостаток: ограниченное число периферийных устройств (до 32), усеченная версия сетевого обмена по принципу Master – Slave. Типичная периферия – датчики (со встроенным интерфейсом серии Sitrans), исполнительные устройства (частотные преобразователи). Коммуникация Коммуникация Сетевая коммуникация – это средства и функции, позволяющие подключать устройства управления в состав распределенной системы управления. Они предназначены для организации обмена данными между разнообразными средствами, входящими в состав сети, располагающимися иногда на значительном расстоянии друг от друга. Особенности: наличие устройств с различными способностями коммуникаций, обмен производится небольшими массивами информации, максимальный размер 128 байт, существует возможность выставлять приоритеты для различной информации, обмен должен производиться в режиме реального времени. Коммуникация