СИСТЕМА МОНИТОРИНГА ДАННЫХ ОТ ДАТЧИКОВ ВЕСА И
реклама

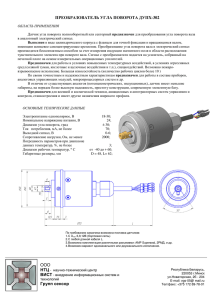
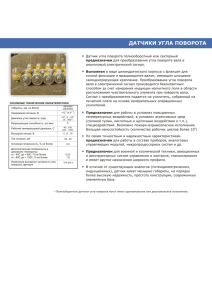
СИСТЕМА МОНИТОРИНГА ДАННЫХ ОТ ДАТЧИКОВ ВЕСА И ЭНКОДЕРОВ Аминев Д.А., Головинов Е.Э., Увайсов С.У. Рассматривается проблема создания недорогой системы ввода данных в компьютер от датчиков веса и энкодера. Приводится структурная схема системы и стоимостная оценка ее реализации. Monitoring system of weight sensors and encoders.Aminev D.A., Uvaysov S.U. Issue of creating of inexpensive system for data input from weight sensor and encoder is studied. Structure chart of system and cost estimates of realization is given. При проектировании редукторов [1] для конвейерных систем, тяжелого машиностроения и электронной промышленности одной из задач является мониторинг нагрузки на вал и угла его поворота. Для измерения угла поворота вала можно использовать устройства типа энкодер, которые могут крепиться непосредственно на вал. Основными производителями энкодеров являются компании Autonics, Balluff, IFM Electronic, Omron, Pepperl Fuchs и др. Различают инкрементные и абсолютные энкодеры. В инкрементных при повороте на определённый угол на выходе формируется импульс напряжения, а у абсолютных генерируется уникальный цифровой код для каждого положения вала. Инкременые являются более дешевыми [2]. Для измерения веса применяют тензодатчики. По конструктиву эти датчики бывают балочного, колонного, мембранного, S-образного, single point и других типов. При измерении нагрузки на вал целесообразно использовать S-образные тензодатчики. Их производят как отечественные (Тензо-М, ВекторПМ и др.), так и зарубежные (VISHAY, Celtron, Sensortronics, HBM и др.) компании. Наилучшими по соотношению цена-качество являются датчики компании Тензо-М [3]. Для ввода данных от датчиков и энкодеров в ПЭВМ используют различные подсистемы ввода. Такие подсистемы выпускают зарубежные компании Advantec, L-Card, Siemens и др. и отечественные ЗАО “Инструментальные системы”, ЗАО “Руднев-Шиляев”, и др. Платы сбора даных ЗАО “Руднев-Шиляев” являются самыми дешевыми [4]. Пример реализации системы ввода данных от тензодатчика и энкодера в ПЭВМ для измерений значений веса до 100 Кг с точностью до 10 г и угла поворота с точностью до 0,35° представлен на рис.1. Весовой терминал RS-232 Тензодатчик Нормирующий усилитель Энкодер 5...10 мВ ПЭВМ Подсистема ввода 0...5 В USB ... Рис.1. Пример реализации системы ввода данных от тензодатчика и энкодера в ПЭВМ. Здесь электрический сигнал тензодатчика напряжением до 200 мВ поступает на нормирующий усилитель постоянного тока, который масштабирует сигнал с размахом от 5 до 10 мВ в сигнал размахом до 5 Вольт. Затем масштабированный сигнал подается на аналоговый вход подсистемы ЛА-50USB компании ЗАО “Руднев-Шиляев” [4]. Энкодер при повороте на заданный угол формирует импульсы напряжения, поступающие на цифровой вход подсистемы ЛА-50USB. Подсистема ввода ЛА-50USB через интерфейс USB передает в ПЭВМ значения веса и угла поворота энкодера. Как альтернативный вариант можно вместо нормирующего усилителя можно использовать весовой терминал, передающий данные в ПЭВМ посредством интерфейса RS232. Преимуществом такой реализации является возможность непосредственной калибровки тензодатчика на весовом терминале, имеющем индикацию и кнопки регулировки. Итоговая стоимость такой реализации на основе тензодатчика С2А 100 (4300 руб.), нормирующего усилителя НУ-05DC (5600 руб.), энкодера E40H (3500 руб.), подсистемы ввода ЛА-50USB (3000 руб.) и при наличии персонального компьютера составляет 16400 руб., что значительно ниже предлагаемых аналогов. 1. 2. 3. 4. Литература Дмитриев Ф. С. Проектирование редукторов точных приборов. //Л., «Машиностроение», 1971 г. 160стр. http://prst.ru/ugol.html – описание энкодеров http://www.tenso-m.ru –сайт компании Тензо-М http://rudshel.ru/daq_board.html – платы фирмы ЗАО “Руднев-Шиляев”